Настоящее изобретение относится к способу и системе установки элементов в основание и к носителю записи данных для этого способа.
Известны способы установки предыдущего элемента i-1, затем следующего элемента i в основание вдоль теоретической траектории для выполнения какого-либо сооружения, осуществляемые при помощи постановочной стойки с направлением ее перемещения. Эти известные способы содержат:
- этап определения номинальных положений, в которых элементы должны быть установлены в основание, в зависимости от теоретической траектории;
- этап автоматического направления постановочной стойки к намеченному положению, в котором должен быть установлен следующий элемент, в зависимости от номинального положения, определенного для следующего элемента, и от данных топографической съемки.
Например, эти способы применяют для установки на бетонные плиты подкладок, предназначенных для укладки железнодорожных рельсов. В частности, их применяют при прокладке железнодорожного пути без балластного слоя или без шпал. Например, такие способы установки описаны в патентных заявках ЕР 0803609 и ЕР 1178153.
Постановочную стойку необходимо располагать над основанием с высокой точностью. Для этого известен способ управления постановочной стойкой в соответствии с данными топографической съемки (см. ЕР 1178153).
Эти способы являются удовлетворительными. В частности, они позволяют позиционировать каждый элемент с незначительной абсолютной погрешностью относительно номинального положения, в котором этот элемент должен был быть установлен. Под «абсолютной погрешностью позиционирования элемента i» в данном случае следует понимать разность Dai между точкой координат Хmi, Ymi, Zmi, в которой элемент i реально установлен в основание, и точкой координат Xni, Yni, Zni, определенной для этого элемента. Существующие способы позволяют удерживать абсолютную погрешность в диапазоне, например, +/- 1 мм. В этом случае говорят, что абсолютная точность способа составляет +/- 1 мм.
При такой абсолютной точности относительная погрешность Dri позиционирования между элементом i-1 и элементом i находится в диапазоне, который в два раза больше диапазона, допустимого для абсолютной погрешности. Под относительной погрешностью Dri позиционирования между элементом i-1 и элементом i следует понимать разность между абсолютной погрешностью Dai позиционирования элемента i и абсолютной погрешностью Dai-1 позиционирования элемента i-1.
В случае применения для прокладки железнодорожных путей абсолютную погрешность ограничивают, чтобы пассажиры поезда не испытывали неудобства из-за вибрации. Существующие способы позволяют решить эту задачу.
Вместе с тем в известных способах пока не сделано ничего, чтобы уменьшить относительную погрешность позиционирования. Так, в крайнем случае, может возникнуть следующая ситуация. Элемент i-1 имеет абсолютную погрешность +1 мм в одном направлении, и элемент i имеет абсолютную погрешность -1 мм в этом же направлении. Каждая из этих двух абсолютных погрешностей находится в диапазоне допустимых абсолютных погрешностей. Однако в этих условиях относительная погрешность Dri равна 2 миллиметрам, что считается недопустимым, так как, например, может привести к возникновению вибрации, ощущаемой пассажирами.
Поэтому желательно уменьшить относительную погрешность.
Эту задачу и ставит перед собой настоящее изобретение, которое предлагает способ установки элементов в основание, позволяющий уменьшить относительную погрешность позиционирования этих элементов.
В связи с этим объектом настоящего изобретения является способ установки в основание предыдущего элемента и затем следующего элемента, при этом способ содержит:
- этап определения абсолютной погрешности позиционирования предыдущего элемента по отношению к номинальному положению, в котором он должен был быть установлен; и
- этап автоматического направления постановочной стойки к намеченному положению, в котором должен устанавливаться следующий элемент, также осуществляемый в зависимости от абсолютной погрешности позиционирования, определенной для предыдущего элемента, таким образом, чтобы уменьшить относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу.
В вышеуказанном способе учет абсолютной погрешности позиционирования предыдущего элемента во время направления постановочной стойки к намеченному положению, в котором должен устанавливаться следующий элемент, позволяет уменьшить относительную погрешность позиционирования этого следующего элемента по отношению к предыдущему элементу.
Варианты осуществления этого способа могут содержать один или несколько следующих отличительных признаков:
- этап вычисления намеченного положения путем добавления к, по меньшей мере, одной координате номинального положения в заданном направлении половины абсолютной погрешности позиционирования предыдущего элемента в этом же направлении;
- операцию измерения положения, в котором постановочная стойка устанавливает в основание предыдущий элемент, причем это измерение осуществляют при помощи измерительного поста, установленного на знаке для топографической съемки, и операцию вычитания измеренного положения из номинального положения, установленного для предыдущего элемента;
- этап направления, который также осуществляют в зависимости от измерений положения постановочной стойки, осуществленных:
- при помощи первого измерительного поста, установленного на первом знаке для топографической съемки, когда постановочная стойка перемещается вдоль первого участка теоретической траектории; и
- при помощи второго измерительного поста, установленного на втором знаке для топографической съемки, отстоящего от первого знака, когда постановочная стойка перемещается вдоль второго участка теоретической траектории,
при этом способ содержит:
- этап оценки размерного отклонения между координатами положения постановочной стойки, полученными на основании измерений первого поста, и координатами этого же положения постановочной стойки, полученными на основании измерений второго поста, и
- во время этапа направления постановочную стойку направляют к намеченному положению также в зависимости от этого оценочного отклонения таким образом, чтобы уменьшить относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу во время перехода от первого участка ко второму участку;
- оценочное отклонение используют для направления постановочной стойки, по меньшей мере, для установки n первых последовательных элементов вдоль второго участка, при этом n является целым числом, большим или равным десяти;
- этап вычисления намеченного положения n первых последовательных элементов второго участка путем добавления к, по меньшей мере, одной из координат номинального положения в заданном направлении оценочного отклонения в этом же направлении, поделенного на n;
- устанавливаемые в основание элементы являются подкладками для железнодорожных рельсов.
Кроме того, эти варианты осуществления способа имеют следующие преимущества:
- вычисление намеченного положения путем добавления к координатам номинального положения половины абсолютной погрешности позиционирования предыдущего элемента позволяет свести к минимуму относительную погрешность позиционирования,
- направление постановочной стойки к намеченному положению в зависимости от оценочного отклонения между измерениями, выполненными при помощи первого и второго измерительных постов, позволяет, например, сохранять относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу в допустимом диапазоне во время перехода от первого участка ко второму участку теоретической траектории,
- направление постановочной стойки в зависимости от оценочного отклонения для установки, по меньшей мере, десяти первых последовательных элементов вдоль второго участка позволяет постепенно компенсировать это оценочное отклонение, сохраняя при этом погрешности позиционирования в допустимом диапазоне.
Объектом настоящего изобретения является также носитель для записи данных, содержащий команды для осуществления вышеуказанного способа, когда эти команды исполняются электронно-вычислительной машиной.
Объектом настоящего изобретения является также система установки в основание предыдущего элемента, а затем следующего элемента вдоль теоретической траектории для выполнения сооружения, при этом система содержит:
- постановочную стойку с направлением перемещения, выполненную с возможностью установки элементов в основание,
- по меньшей мере, один измерительный пост, установленный на первом знаке для топографической съемки, причем этом пост выполнен с возможностью измерения положения постановочной стойки, и
- блок направления перемещений постановочной стойки в зависимости от данных топографической съемки и от теоретической траектории.
Этот блок направления выполнен с возможностью осуществления вышеописанного способа установки.
Настоящее изобретение будет более очевидно из нижеследующего описания, приведенного исключительно в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - схематичный вид в перспективе системы установки рельсовых подкладок для прокладки железнодорожного пути.
Фиг.2 - схематичный вид рельсовой подкладки, которую можно устанавливать при помощи системы, показанной на фиг.1.
Фиг.3 - схематичный вид сверху системы, показанной на фиг.1.
Фиг.4 - блок-схема способа установки рельсовых подкладок при помощи системы, показанной на фиг.1.
На фиг.1 показана система 2 установки подкладок 4 на бетонной плите 6.
Далее в заявке подробное описание признаков и действий, хорошо известных специалистам, опускается.
Система 2 содержит средство 10 для транспортировки управляемого устройства 12 установки подкладок 4.
Транспортное средство 10 установлено на четырех колесах, два из которых являются направляющими, а два других - ведущими и которые обеспечивают автономное перемещение этого транспортного средства в заданном направлении. Транспортное средство 10 содержит заднюю сторону, на которой неподвижно закреплено устройство 12.
Устройство 12 содержит постановочную стойку 14 для установки рельсовых подкладок и управляемый механизм 16 позиционирования стойки 14 относительно верхней поверхности бетонной плиты 6.
Стойка 14 выполнена с возможностью одновременной установки двух подкладок 4 на бетонной плите 6, когда эта плита еще полностью не затвердела. Для этого стойку выполняют с возможностью осуществления способа установки, описанного в патентной заявке ЕР 0803609, согласно которому во время установки рельсовых подкладок свежую плиту 6 подвергают вибрации.
Например, стойка 14 имеет общую Н-образную форму и в своей нижней части содержит два силовых цилиндра, на концах которых закреплены две рельсовые подкладки 4, предназначенные для установки в недавно залитую плиту 6. Стойка 14 выполнена с возможностью удержания подкладок 4 на расстоянии друг от друга, которое соответствует габариту прокладываемого железнодорожного пути. Стойка 14 обладает только одной степенью свободы, позволяющей перемещать предназначенные для крепления подкладки 4 вдоль оси Z. В данном случае ось Z является перпендикулярной к верхней поверхности плиты 6. На фиг.1 показаны также ось X, параллельная направлению перемещения транспортного средства 10, и ось Y, перпендикулярная к осям Х и Z. Оси X, Y, Z привязаны, например, к транспортному средству 10 и определяют ортогональные направления.
Более подробно стойка 14 описана, например, в патентной заявке ЕР 0803609.
Механизм 16 выполнен с возможностью перемещения стойки 14 с шестью степенями свободы, а именно с тремя степенями свободы во вращении вокруг осей X, Y и Z и с тремя степенями свободы в поступательном движении вокруг осей X, Y и Z.
Транспортное средство 10 содержит также направляющий блок 20, выполненный с возможностью направления устройства 12 в зависимости от данных топографической съемки и от измерений, полученных при помощи приемника 22.
Блок 20 выполнен также с возможностью управления перемещением транспортного средства 10.
Блок 10 выполнен, например, в виде электронно-вычислительной машины, установленной на транспортном средстве 10 и предназначенной для осуществления способа, показанного на фиг.4. Для этого ЭВМ связана с носителем 26 записи, содержащим команды для выполнения способа, показанного на фиг.4, когда эти команды исполняются ЭВМ.
На своей задней стороне стойка 14 содержит отражатели 30, выполненные с возможностью взаимодействия с измерительным постом 32, установленным на краю прокладываемого железнодорожного пути. Например, на стойке 14 закреплены три отражателя 30.
На раме транспортного средства закреплен также отражатель 34. Например, этот отражатель 34 установлен на крыше транспортного средства 10.
Пост 32 устанавливают на штативе на вертикали знака 36 для топографической съемки. Географическое положение знака 36 в привязанной к земле системе отсчета предварительно измеряют и вводят в блок 20.
Пост 32 содержит лазерное устройство измерения расстояния, оборудованное передающей оптикой и принимающей оптикой и позволяющее определить с очень высокой степенью точности расстояние и угол между постом 32 и совокупностью отражателей 30 и 34, установленных соответственно на стойке 14 и транспортном средстве 10.
Пост 32 оборудован также радиопередатчиком 38, передающим результат измерений, осуществляемый в каждой момент устройством 32, в направлении приемника 22, установленного на транспортном средстве 10.
Более подробно направление стойки 14 в зависимости от данных топографической съемки и от измерений поста 32 описано в патентной заявке ЕР 1178153.
На фиг.2 показан пример выполнения подкладки 4, предназначенной для установки на ней рельса и для передачи усилия на плиту от передвигающегося по этому рельсу железнодорожного транспортного средства.
Для этого подкладка 4 содержит пластину 40 из жесткого материала, такого как чугун, и два крепежных элемента 42, каждый из которых содержит резьбовой стержень, позволяющий закрепить рельс на подкладке 4 при помощи гаек. Подкладка 4 содержит также два анкерных стержня 44 в основном цилиндрической формы, обеспечивающие крепление в плите 6 после ее затвердения.
На фиг.3 показано транспортное средство 10 во время его перемещения вдоль теоретической траектории 50. Направление перемещения транспортного средства 10 вдоль траектории 50 показано стрелкой 52. На этой фиг.3 элементы, уже описанные ранее со ссылками на фиг.1, обозначены теми же цифровыми позициями. Координаты траектории 50 в системе отсчета, привязанной к земле, введены, например, в запоминающее устройство 26.
В частности, на этой фиг.3 показан участок 54 траектории 50, на котором для направления постановочной стойки используют только измерения поста 32.
Учитывая, что дальность действия поста 32 является ограниченной, вдоль траектории 50 через равномерные промежутки установлены знаки для топографической съемки. Например, знаки для топографической съемки установлены вдоль траектории 50 через каждые 50-100 метров. В данном случае показаны только три дополнительных знака 56-58. Знак 57 находится непосредственно после знака 36. Выражение «после знака» обозначает в данном случае положение в направлении перемещения транспортного средства 10.
Система 2 содержит также второй пост 60 измерения положения стойки 14, установленный на знаке 57 для топографической съемки. Этот пост 60 является, например, идентичным посту 32 и позволяет измерять положение стойки 14, когда транспортное средство 10 перемещается по участку 62 траектории 50.
В системе 2 участки 54 и 62 частично перекрывают друг друга на интервале АС.
Далее со ссылкой на фиг.4 следует описание работы системы 2 в частном случае, когда транспортное средство 10 изначально находится на участке 54 траектории 50.
Способ начинается с фазы 70, во время которой для направления постановочной стойки 14 используют только измерения поста 32.
В частности, на этапе 74 блок 20 направляет стойку 14 в заранее рассчитанное намеченное положение, в котором должна быть установлена пара i-1 рельсовых подкладок в зависимости от координат Xci-1, Yci-1, Zci-1. Координаты Xci-1, Yci-1, Zci-1 рассчитывают заранее. Расчет этих координат будет описан ниже в частном случае координат Xci, Yci и Zci намеченного положения, в котором должна быть установлена следующая пара i подкладок.
Во время этапа 74 блок 20 в ходе операции 76 подает команду на перемещение транспортного средства 10 вдоль траектории 50 для позиционирования стойки 14 вблизи намеченного положения, в котором должна быть установлена пара i-1 подкладок. Обычно после операции 76 стойка находится на расстоянии +/- 1 см от намеченного положения.
После достижения намеченного положения во время операции 78 блок 20 выдает команду на механизм 16 для позиционирования стойки в намеченном положении с более высокой точностью. Обычно после операции 78 стойка 14 находится в +/- 1 мм от намеченного положения.
После завершения этапа 74 во время этапа 80 блок 20 определяет абсолютную погрешность позиционирования пары i-1 подкладок по отношению к номинальному положению, в котором она должна была быть установлена. В данном случае номинальное положение представлено координатами Хni-1, Yni-1 и Zni-1 положения постановочной стойки. Определение номинальных координат будет подробнее описано ниже в частном случае координат Хni, Yni и Zni номинального положения следующей пары i подкладок.
В частности, во время этапа 80 пост 32 измеряет в ходе операции 82 положение стойки 14 и передает измеренное положение в блок 20.
Во время операции 82 блок 20 получает координаты Хmi-1, Ymi-1 и Zmi-1 измеренного положения стойки 14. Эти координаты выражены, например, относительно ортонормированного репера, оси которого параллельны осям X, Y и Z и который является фиксированным относительно знака 36.
После этого во время операции 84 измеренные координаты вычитают из координат Xni-1, Yni-1 и Zni-1 номинального положения, в котором теоретически должна быть установлена пара i-1 подкладок. После операции 84 получают абсолютную погрешность Dai-1 позиционирования пары i-1 подкладок.
После этого во время этапа 86 пару i-1 подкладок устанавливают в свежей бетонной плите 6, например, при помощи способа, описанного в ЕР 0803609. Во время этапа 86 стойка 14 удерживается в положении, измеренном во время операции 82.
После установки пары i-1 подкладок во время этапа 88 блок 20 определяет координаты Xni, Yni и Zni номинального положения, в котором должна быть установлена следующая пара i подкладок. Например, зная координаты траектории 50 и заранее определенный промежуток между двумя последовательными парами подкладок вдоль этой траектории, блок 20 может рассчитать координаты Хni, Yni и Zni номинального положения, в котором теоретически должна быть установлена пара i подкладок. Чтобы эти координаты можно было использовать в блоке 20 во время направления постановочной стойки, их необходимо сравнить с координатами текущего положения транспортного средства. Это сравнение можно осуществить только в случае, если текущие координаты стойки или транспортного средства и номинальные координаты сравниваются в общем репере. Для приведения различных координат к общему реперу используют данные топографической съемки знака 36 и измерения поста 32. Например, в данном случае общим репером является ортонормированный репер, направления которого являются коллинеарными с вышеуказанными осями X, Y и Z и который является фиксированным относительно знака 36 для топографической съемки. При этом условии, используя данные топографической съемки знака 36, координаты Xni, Yni и Zni приводят к этому общему реперу. Общий репер используют также, например, для выражения координат Xci, Yci и Zci, а также координат Хni, Yni и Zni.
После этого на этапе 90 блок 20 рассчитывает координаты Xci, Yci и Zci намеченного положения, в котором должна быть установлена следующая пара i подкладок. Эти координаты приводят к общему реперу. Во время этапа 90 намеченное положение рассчитывают в зависимости от абсолютной погрешности Dai-1, определенной на этапе 80. В частности, для установки n первых пар подкладок на участке 54 координаты Xci, Yci и Zci вычисляют, например, при помощи следующих отношений:
Xci=Xni(Dx,i-1/2)+Ex/n
Yci=Yni(Dy,i-1/2)+Ey/n
Zci=Zni(Dz,i-1/2)+Ez/n
где
- Dx,i-1, Dy,i-1 и Dz,i-1 - координаты абсолютной погрешности Dai-1, определенной на этапе 80 соответственно по осям X, Y и Z общего репера, и
- Ex, Еy и Ez - координаты соответственно по осям X, Y и Z общего репера, отклонения Е между измерениями, осуществленными с поста 32 и с предыдущего поста, установленного на знаке 56.
Оценка координат Еx, Еy и Ez будет подробнее описана ниже для частного случая отклонения между измерениями постов 32 и 60.
Обычно n является целым числом, большим или равным десяти.
Если во время этапа 90 предназначенная для установки следующая пара подкладок не входит в число n первых подкладок участка, координаты Xci, Yci и Zci рассчитывают при помощи следующих отношений:
Xci=Xni(Dx,i-1/2)
Yci=Yni(Dy,i-1/2)
Zci=Zni(Dz,i-1/2)
После этапа 90 способ повторяют с этапа 74 для установки следующей пары i подкладок.
Этапы 74-90 повторяют в замкнутом цикле, пока стойка 14 проходит участок 54 траектории 50.
Вместе с тем, когда стойка 14 достигает интервала АС перекрывания, параллельно этапу 80 пост 60 измеряет на этапе 94 положение стойки 14. Предпочтительно этап 94 осуществляют одновременно с этапом 82, чтобы сократить погрешности измерения отклонения Е.
После этого пост 60 направляет данные измерений в блок 20 во время этапа 96.
Во время этапа 98 блок 20 оценивает отклонение Е между измерениями поста 32 и измерениями поста 60. Для этого во время этапа 98 блок 20 устанавливает значение координат Ех, Еy и Ez на основании разности между измерениями, осуществленными на этапах 82 и 94, а также в зависимости от данных топографической съемки знаков 36 и 57. Действительно, было замечено, что координаты Xmi, Ymi и Zmi, полученные в результате измерений, осуществленных постом 32, не являются строго идентичными координатам, полученным в результате измерений постом 60. Это размерное отклонение Е во время перехода от участка 54 к участку 62 может привести к превышению значений, допустимых для относительной погрешности. После этапа 98 значения Ех, Еy и Ez заносятся в память для использования во время установки n первых пар подкладок на участке 62.
Когда стойка пройдет весь участок 54, фаза 70 завершается, и начинается новая фаза 100, на которой используют только измерения поста 60 для направления стойки 14 во время прохождения участка 62.
В начале этой фазы 100 значения Ех, Еy и Ez, использованные для расчета координат намеченного положения n первых пар, предназначенных для установки, являются значениями, оцененными во время этапа 98 предыдущей фазы использования.
Параллельно этапу 100 пост 32, например, перемещают и устанавливают на знаке 58, расположенном непосредственно после знака 57. С этого момента способ, описанный для частного случая участков 54 и 62, возобновляется между участком 52 и следующим сразу же за ним участком. Таким образом, фазы 70 и 100 повторяются во время всего прохождения траектории 50 транспортным средством 10.
Возможны также многие другие варианты осуществления. Например, в варианте посты 32 и 60 выполняют с возможностью передачи друг другу результатов измерений одного и того же положения стойки 14. На основании измерений постов 32 и 60 пост 32 и/ пост 60 корректирует свои собственные измерения, чтобы обеспечить постепенное компенсирование отклонения Е во время перехода от участка 54 к участку 62.
Расчет намеченного положения в зависимости от абсолютной погрешности позиционирования предыдущей пары подкладок можно осуществлять без учета отклонения Е. И наоборот, описанный в настоящей заявке способ постепенного компенсирования отклонения Е можно применять без корректировки намеченного положения в зависимости от абсолютной погрешности позиционирования предыдущей пары подкладок.
Можно использовать и другие общие реперы, например общий репер может быть привязан к транспортному средству 10.
Описанный в настоящей заявке частный случай способа установки подкладок для железнодорожных рельсов можно применять для установки любого элемента, применяемого при строительных работах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЦИФРОВЫХ ТОПОГРАФИЧЕСКИХ ПЛАНОВ | 1997 |
|
RU2124182C1 |
| Способ определения слабовыраженного рельефа сельскохозяйственного поля | 1982 |
|
SU1137299A1 |
| ВСТАВКА ТРЕХМЕРНЫХ ОБЪЕКТОВ В СТЕРЕОСКОПИЧЕСКОЕ ИЗОБРАЖЕНИЕ НА ОТНОСИТЕЛЬНУЮ ГЛУБИНУ | 2010 |
|
RU2527249C2 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
| СПОСОБ ОХРАНЫ НАЗЕМНЫХ ОБЪЕКТОВ ОТ ПОСЛЕДСТВИЙ ДЕФОРМАЦИОННЫХ ПРОЦЕССОВ, ИНИЦИИРОВАННЫХ РАЗРАБОТКАМИ МЕСТОРОЖДЕНИЙ НЕФТИ И ГАЗА | 2010 |
|
RU2450105C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2024 |
|
RU2833367C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ВСТАВЛЕНИЯ ЭЛЕМЕНТОВ В ОСНОВАНИЕ И УСТРОЙСТВО ДЛЯ ВСТАВЛЕНИЯ | 2001 |
|
RU2266360C2 |
| СИСТЕМЫ И СПОСОБЫ ЗАХВАТА ИЗОБРАЖЕНИЙ БОЛЬШОЙ ПЛОЩАДИ ПО ЧАСТЯМ, ВКЛЮЧАЮЩИЕ В СЕБЯ КАСКАДНЫЕ КАМЕРЫ И/ИЛИ КАЛИБРОВОЧНЫЕ ПРИЗНАКИ | 2010 |
|
RU2562707C2 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |



Изобретение относится к области строительства. Система установки в основание предыдущего элемента, затем следующего элемента содержит постановочную стойку с направлением перемещения, по меньшей мере, один измерительный пост, установленный на первом знаке для топографической съемки, и блок направления перемещений постановочной стойки. Способ установки в основание предыдущего элемента, затем следующего элемента заключается в том, что сначала определяют номинальные положения, в которых элементы должны быть установлены в основание, в зависимости от теоретической траектории. Затем определяют абсолютную погрешность позиционирования предыдущего элемента по отношению к номинальному положению, в котором предыдущий элемент должен был быть установлен. После этого постановочная стойка автоматически направляется к назначенному положению, в котором должен устанавливаться следующий элемент, в зависимости от абсолютной погрешности позиционирования, определенной для предыдущего элемента, таким образом, чтобы уменьшить относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу. Технический результат заключается в уменьшении относительной погрешности позиционирования устанавливаемых элементов. 2 н. и 7 з.п. ф-лы, 4 ил.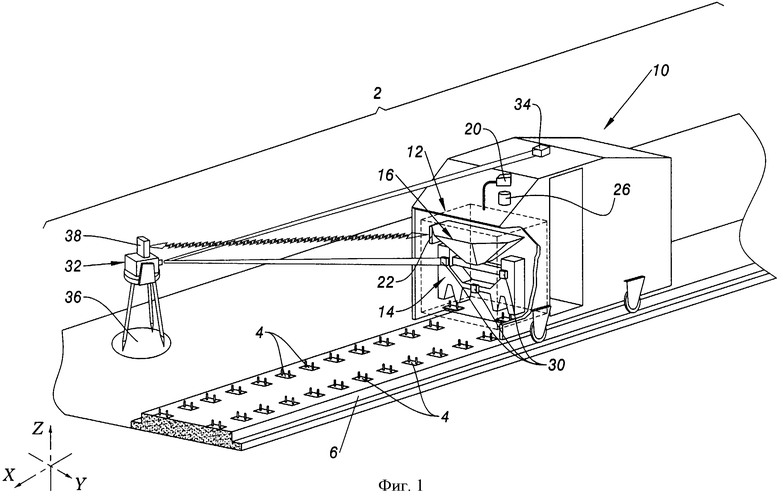
1. Способ установки предыдущего элемента, затем следующего элемента в основание вдоль теоретической траектории (50) для выполнения сооружения, осуществляемый при помощи постановочной стойки с направлением ее перемещения, при этом способ содержит:
этап (88) определения номинальных положений, в которых элементы должны быть установлены в основание, в зависимости от теоретической траектории;
этап (74) автоматического направления постановочной стойки к намеченному положению, в котором должен быть установлен следующий элемент, в зависимости от номинального положения, определенного для следующего элемента, и от данных топографической съемки, отличающийся тем, что содержит:
этап (80) определения абсолютной погрешности позиционирования предыдущего элемента по отношению к номинальному положению, в котором предыдущий элемент должен был быть установлен; и
этап (74) автоматического направления постановочной стойки к назначенному положению, в котором должен устанавливаться следующий элемент, который также осуществляют в зависимости от абсолютной погрешности позиционирования, определенной для предыдущего элемента, таким образом, чтобы уменьшить относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу.
2. Способ по п.1, который содержит этап (90) вычисления намеченного положения путем добавления к, по меньшей мере, одной координате номинального положения в заданном направлении, половины абсолютной погрешности позиционирования предыдущего элемента в этом же направлении.
3. Способ по п.1, в котором этап определения абсолютной погрешности позиционирования содержит:
операцию (82) измерения положения, в котором постановочная стойка устанавливает в основание предыдущий элемент, причем это измерение осуществляют при помощи измерительного поста, установленного на знаке для топографической съемки, и
операцию (84) вычитания измеренного положения из номинального положения, установленного для предыдущего элемента.
4. Способ по п.1, в котором этап (74) направления также осуществляют в зависимости от измерений положения постановочной стойки, осуществленных:
при помощи первого измерительного поста (32), установленного на первом знаке (36) для топографической съемки, когда постановочная стойка перемещается вдоль первого участка (54) теоретической траектории; и
при помощи второго измерительного поста (60), установленного на втором знаке (57) для топографической съемки, отстоящего от первого знака, когда постановочная стойка перемещается вдоль второго участка (62) теоретической траектории, при этом способ содержит:
этап (98) оценки размерного отклонения между координатами положения постановочной стойки, полученными на основании измерений первого поста, и координатами этого же положения постановочной стойки, полученными на основании измерений второго поста, и во время этапа (74) направления постановочную стойку направляют к намеченному положению также в зависимости от этого оценочного отклонения таким образом, чтобы уменьшить относительную погрешность позиционирования следующего элемента по отношению к предыдущему элементу во время перехода от первого участка (54) ко второму участку (62).
5. Способ по п.4, в котором оценочное отклонение используют для направления постановочной стойки, по меньшей мере, для установки n первых последовательных элементов вдоль второго участка (62), при этом n является целым числом, большим или равным десяти.
6. Способ по п.5, который содержит этап (90) вычисления намеченного положения n первых последовательных элементов второго участка (62) путем добавления к, по меньшей мере, одной из координат номинального положения в заданном направлении, оценочного отклонения в этом же направлении, поделенного на n.
7. Способ по любому из предыдущих пунктов, в котором устанавливаемые в основание элементы являются подкладками для железнодорожных рельсов.
8. Система установки в основание предыдущего элемента, а затем следующего элемента вдоль теоретической траектории для выполнения сооружения, при этом система содержит:
постановочную стойку (14) с направлением перемещения, выполненную с возможностью установки элементов в основание,
по меньшей мере, один измерительный пост (32), установленный на первом знаке (36) для топографической съемки, причем этом пост выполнен с возможностью измерения положения постановочной стойки и
блок (20) направления перемещений постановочной стойки в зависимости от данных топографической съемки и от теоретической траектории, отличающаяся тем, что блок направления выполнен с возможностью осуществления способа установки по любому из пп.1-7.
9. Система по п.9, которая содержит, по меньшей мере, один второй измерительный пост (60), установленный на втором знаке (57) для топографической съемки, причем этот второй пост выполнен с возможностью измерения положения постановочной стойки на участке теоретической траектории, где положение постановочной стойки также измеряют при помощи первого измерительного поста (32), и блок (20) направления выполнен с возможностью осуществления способа установки по любому из пп.4-7.
| ЕР 1178153 A1, 06.02.2002 | |||
| EP 0803609 A2, 29.10.1997 | |||
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ВСТАВЛЕНИЯ ЭЛЕМЕНТОВ В ОСНОВАНИЕ И УСТРОЙСТВО ДЛЯ ВСТАВЛЕНИЯ | 2001 |
|
RU2266360C2 |

