Изобретение относится к морской навигации, а именно к способам определения местонахождения подводных аппаратов в подводном положении [G01S 5/08, G01S 5/14, G01S 5/18, G01S 5/30, G01S 15/46, G01S 15/50, G01S 19/48, G01S 19/51].
Определение местонахождения подводного аппарата в подводном положении без прерывания выполняемых им работ для всплытия и определения координат является одной из насущных задач навигационно-гидрографического обеспечения подводных работ. В настоящее время практикуется привязка местоположения подводного аппарата к координатам, предварительно установленных на площади выполняемых работ, акустических реперов – маяков, либо к координатам естественных реперов - ярко выраженных форм рельефа дна с установленными координатами в узлах, так называемых «навигационных поверхностей» [Э. С. Зубченко «Навигационная поверхность новая форма цифровой модели для представления данных съемки рельефа дна в интересах повышения безопасности мореплавания» журнал «Навигация и гидрография» № 28, 2008г. стр. 77-93].
Аналогично задача решается в патенте RU 2480790 C1 «СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИЗМЕРЕННЫХ ГЛУБИН ЗВУКОВЫМИ СИГНАЛАМИ» [опубл.: 27.04.2013], включающий излучение звуковых сигналов посредством многолучевого эхолота, прием отраженных сигналов, их обработку и определение величины глубин при различных наклонах излучения с определением погрешности в оценке местоположения отраженного сигнала от случайного вращения судна, в котором определение погрешности выполняют по значению плотности распределения случайного вращения судна в соответствии с зависимостью Увеличенное изображение (открывается в отдельном окне)

где dP - плотность распределения случайного вращения судна; θ - полярное расстояние; ϕ - долгота; δ - угол поворота судна вокруг оси, отличающийся тем, что излучение звуковых сигналов посредством многолучевого эхолота осуществляют по 32 каналам, при приеме отраженных сигналов формируют 256 лучей, по архивным данным устанавливают местоположение локальных опасных форм рельефа, при определении значений глубины над локальными опасными формами рельефа, превышающими измеренные фоновые глубины, уменьшают дискретность измерений глубины в поперечном направлении, путем сокращения полосы захвата, при выявлении глубин, превышающих измеренные фоновые глубины, рассчитывают диаметр опасной формы рельефа.
В СПОСОБЕ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ [RU 2555204 С1, опубл.: 10.07.2015] определяют вертикальную характеристику направленности эхосигнала, имеющую нулевой угол наклона α0, для нее измеряют время распространения эхосигнала до дна и обратно Тверт, измеряют скорость звука на глубине приема С0, определяют глубину места под килем Hk=0,5С0Тверт, находят среднее значение
градиента изменения скорости звука по глубине g из формулы
с использованием метода численной итерации, измеряют время распространения эхосигнала по каждому из наклонных лучей Tiнакл с углом наклона αi, определяют глубину Hi для выбранной характеристики направленности с углом αi из формулы

методом численной итерации, определяют горизонтальное расстояние от приемника до отражающего участка дна для выбранной характеристики направленности по формуле

отображают на графике координаты снятой точки на дне Hi и Di.
Установка на дне акустических реперов-маяков позволяет определить положение подводного аппарата в местной системе координат и впоследствии фактические координаты подводного аппарата. Однако такой метод может использоваться при работах на отдельных предварительно обустроенных полигонах и практически не приемлем при необходимости определения координат подводного аппарата в движении по протяженному маршруту, например, трассе подводного трубопровода или потребует обустройства неопределенного количества подводных реперов-маяков.
Использование «навигационных поверхностей» в первую очередь предназначено для обеспечения навигационной безопасности путем установления координат потенциально опасных участков с недостаточной степенью детализации промеров глубин между узлами навигационных поверхностей. Определение координат подводного аппарата при наличии в зоне обнаружения гидролокатора подводных реперов - характерных форм рельефа с установленными координатами не представляет сложности. В свою очередь, определение местонахождения подводного аппарата относительно точек цифровой модели рельефа дна с установленными координатами ярко выраженных форм рельефа по предварительно спланированному навигационному пути протяженностью 1000 км и более основано на наличии таких форм рельефа но неприемлемо для использования на маршрутах по которым отсутствует приемлемая частота (дискретность) нахождения таких форм рельефа, а корректировка навигационного пути с привязкой к выраженным формам рельефа при его планировании относительно заранее заданного (требуемого) маршрута недопустима. Так, в Методе планирования навигационного пути подводного робота - подводной лодки с учетом точности карты CN110220510(A) - 2019-09-10 отмечается, что планирование навигационного пути подводного робота - подводной лодки с учетом точности карты местности при планировании навигационного пути 1000 км и более осуществляется на основе данных о топографических особенностях морского дна и области с ровной местностью и небольшим количеством особенностей местности могут привести к расхождению результатов навигации, сбоям навигации и большим отклонениям по сопоставлению с местностью. По своей сути Метод основан на использовании «навигационных поверхностей» и требует наличия в рельефе дна, над которым планируется навигационный путь, орографических реперов – отличительных макроформ рельефа в узловых точках. Фактически, маршрут прокладывается в привязке к наличию неоднородностей рельефа, когда координаты точек его прохождения между начальной и конечной точкой маршрута, как и его траектория, не имеют строго установленных значений. При необходимости повторного выхода подводного аппарата в точку, где ранее был обнаружен, оставлен или утерян объект поиска в районах, где отсутствует возможность обнаружения орографических реперов или установки акустических реперов, вышеуказанные способы не применимы.
Рельеф глубоководных и абиссальных равнин, которые занимают около 40% поверхности дна океана, представляет собой относительно ровные поверхности с площадями от нескольких сотен до нескольких тысяч квадратных километров и состоит из чередующихся форм мезорельефа с линейными размерами 1-2 км с отклонениями, как в положительную так и в отрицательную сторону, на 1-10 м и более в максимуме от средней глубины равнины на площади ~ 50х50 км. Степень повторяемости глубин в таких формах мезорельефа и повторяемость самих форм мезорельефа не позволяет использовать каждую из них в качестве орографических реперов – ориентиров в буквальном понимании. Это не является проблемой при планировании и прокладке навигационных путей для подводных роботов на маршрутах 1000 км и более, так как между равнинами существуют формы рельефа, которые можно использовать как орографические реперы, и планирование навигационного пути осуществляется исходя из их наличия.
Основной технической проблемой аналогов и прототипа является то, что обеспечить расстановку «акустических реперов» с необходимой дискретностью на больших площадях и протяженных маршрутах практически невозможно ввиду значительных финансовых и временных затрат, а необходимая для определения местоположения движущегося подводного аппарата дискретность естественных орографических реперов встречается в ограниченных количествах районов океанов и морей, что не позволяет осуществить повторный выход подводного аппарата к ранее обнаруженному или оставленному объекту в точках с неустановленными координатами с требуемой точностью поскольку расчетное положение подводного аппарата при его движении из точки с известными координатами по участкам маршрута с заданными курсами и скоростями, с учетом доступной информации о течениях, отличается от фактического местоположения за счет фактического влияния течений, которое отличается от учитываемого при расчете курса, и такое отклонение достигает одного километра и более на протяженных маршрутах.
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в обеспечении возможности определения местонахождения подводного аппарата относительно места нахождения объекта поиска в подводном состоянии без использования гидроакустических и орографических реперов.
Указанный технический результат достигается за счет того, что способ определения местоположения подводного объекта, характеризующийся тем, что участок поверхности дна, над которым находится подводный аппарат в момент времени обнаружения или оставления под водой объекта, представляется в виде множества значений измеренных глубин, и местоположение обнаруженного или оставленного подводным аппаратом объекта при повторном выходе к его местонахождению определяют путем установления тождества комбинаторной конфигурации - комбинации значений измеренных при обнаружении или оставлении объекта бортовыми средствами подводного аппарата глубин  с учетом глубины погружения подводного аппарата
с учетом глубины погружения подводного аппарата  , в точках матрицы
, в точках матрицы  , соответствующей поверхности участка дна, над которым находился подводный аппарат в момент
, соответствующей поверхности участка дна, над которым находился подводный аппарат в момент  с одной из равных ей по размеру комбинаций значений глубин
с одной из равных ей по размеру комбинаций значений глубин  измеряемых при поиске объекта, с учетом глубины погружения подводного аппарата, на такой же площади в точках матрицы
измеряемых при поиске объекта, с учетом глубины погружения подводного аппарата, на такой же площади в точках матрицы  , соответствующей поверхности дна в районе поиска, где множество значений матрицы является подмножеством матрицы :
, соответствующей поверхности дна в районе поиска, где множество значений матрицы является подмножеством матрицы :  ,
,  , дискретности точек матриц и
, дискретности точек матриц и  кратны друг другу, при этом тождественной считается та пара комбинаций из матриц
кратны друг другу, при этом тождественной считается та пара комбинаций из матриц  для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма
для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма  для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины в матрице
для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины в матрице  комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеренных с подводного аппарата глубин в точках матрицы
комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеренных с подводного аппарата глубин в точках матрицы  ) с учетом глубины погружения подводного аппарата , с комбинаторными конфигурациями значений глубин
) с учетом глубины погружения подводного аппарата , с комбинаторными конфигурациями значений глубин  на участках соответствующих матрице может быть оценена с помощью сравнения совокупных ошибок первого рода и ошибок второго рода для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигурации учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений и в этих точках.
на участках соответствующих матрице может быть оценена с помощью сравнения совокупных ошибок первого рода и ошибок второго рода для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигурации учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений и в этих точках.
В частности, количество точек матрицы не должно быть менее 100.
В частности, размер матрицы соответствует участку поверхности дна, над которым проложен маршрут движения подводного аппарата при поиске значимого объекта с учетом перекрытия размера матрицы и размер участка поверхности дна, над которым проложен маршрут движения подводного аппарата при поиске значимого объекта устанавливается не менее размера участка поверхности дна соответствующего матрице и не менее площади квадрата поверхности дна, в который вписана окружность с центром в точке расчетного положения подводного аппарата во время обнаружения/оставления значимого объекта и с радиусом равным линейной величине отклонения фактического местоположения подводного аппарата от расчетного при завершении подводного маршрута подводного аппарата во время обнаружения или оставления значимого объекта.
В частности, для проверки тождественности значений ранее измеренной глубины в точках матрицы и глубины измеренной в тех же точках матрицы  бортовым средством подводного аппарата с известной погрешностью, а также с учётом попадания лучей эхолота в локальные неоднородности и вероятных погрешностей измерений в точках матрицы
бортовым средством подводного аппарата с известной погрешностью, а также с учётом попадания лучей эхолота в локальные неоднородности и вероятных погрешностей измерений в точках матрицы  осуществляется проверка статистической гипотезы с использованием критериев Неймана-Пирсона и максимального правдоподобия.
осуществляется проверка статистической гипотезы с использованием критериев Неймана-Пирсона и максимального правдоподобия.
В частности, определение тождественности комбинации измеренных с подводного аппарата значений глубин в точках матрицы с комбинациями значений глубин в точках матрицы осуществляется с использованием программного обеспечения, в том числе устанавливающего совпадение значений в точках матрицы со значениями в точках матрицы по алгоритму  где
где  и
и  – целые числа от 0 до 10,
– целые числа от 0 до 10,  и
и  – целые числа соответствующие количеству точек по оси
– целые числа соответствующие количеству точек по оси  и по оси
и по оси  матрицы , а
матрицы , а  и
и  – целые числа соответствующие количеству точек по оси и по оси матрицы .
– целые числа соответствующие количеству точек по оси и по оси матрицы .
В частности, в качестве отождествляемых комбинаций глубин в точках матриц и используют комбинации отклонений измеряемых значений глубин в точках матрицы от средних значений глубин в пределах матрицы и комбинации отклонения измеренных значений глубин в точках матрицы от средних величин глубины соответствующих участков дна, равных по размерам матрице .
В частности, для сравнения средних значений комбинаторных конфигураций отклонений измеряемых значений глубин со средними значениями комбинаторных конфигурации отклонений ранее измеренных значений глубин используют проверку статистической гипотезы с использованием двухвыборочного -критерия Стьюдента.
-критерия Стьюдента.
Степень тождественности комбинаторных конфигураций значений измеренных глубин определяют количеством m тождественных значений на одинаковых позициях в матрице L и отождествляемой с ней матрицей такого же размера T из матрицы M, а вероятность случайной тождественности определяют по формуле:
 ,
,
для m > 1
где p – вероятность случайности тождественности двух элементов из различных матриц:
 ,
,
где  – количество сочетаний из
– количество сочетаний из  по m-2 элементов,
по m-2 элементов,  – математическое ожидание,
– математическое ожидание,  - среднеквадратическое отклонение случайной величины
- среднеквадратическое отклонение случайной величины  от математического ожидания,
от математического ожидания,  - пороговое значение для тождественности значений в одной паре, m - общее число установленных тождеств между парами элементов, находящихся в L и T на одинаковых местах, i - порядковый номер последнего из выявленных в ряду N тождества пары элементов, j – порядковый номер в ряду N где находится m-тое тождество пар элементов начиная с последнего в ряду N тождества пары элементов, для чего матрицы L и T состоящие из N элементов каждая, представляются в виде рядов значений распределенных по позициям от 1 до N и при установлении тождественности значений на одинаковых позициях в рядах L и T фиксируются порядковые номера в рядах где было установлено тождество, при этом для любых целых чисел N и m количество размещений без повторений из N по m, где
- пороговое значение для тождественности значений в одной паре, m - общее число установленных тождеств между парами элементов, находящихся в L и T на одинаковых местах, i - порядковый номер последнего из выявленных в ряду N тождества пары элементов, j – порядковый номер в ряду N где находится m-тое тождество пар элементов начиная с последнего в ряду N тождества пары элементов, для чего матрицы L и T состоящие из N элементов каждая, представляются в виде рядов значений распределенных по позициям от 1 до N и при установлении тождественности значений на одинаковых позициях в рядах L и T фиксируются порядковые номера в рядах где было установлено тождество, при этом для любых целых чисел N и m количество размещений без повторений из N по m, где  будет расти по мере увеличения
будет расти по мере увеличения  быстрее чем количество всех возможных комбинаций из m элементов с любым количеством повторений от 0 до m любого из элементов множества равное
быстрее чем количество всех возможных комбинаций из m элементов с любым количеством повторений от 0 до m любого из элементов множества равное  до значения
до значения  и экстремумом для функции
и экстремумом для функции  ;
;  будет значение
будет значение  стремящееся к
стремящееся к  при увеличении N.
при увеличении N.
В частности, в качестве отождествляемых комбинаций значений в точках матриц  используются только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений превышающих среднее, (-) для значений ниже среднего и (0) для значений соответствующих среднему.
используются только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений превышающих среднее, (-) для значений ниже среднего и (0) для значений соответствующих среднему.
В частности, матрицы и отображаются графически в виде тепловых карт, а определение местоположения подводного аппарата осуществляют путём отождествления графических отображений матриц и с использованием методов машинного обучения.
В частности, определение местоположения подводного объекта осуществляется в условиях многократно повторяющихся значений глубин в точках с неизвестными координатами.
Комплекс для определения местоположения подводного объекта, реализующий способ определения местоположения подводного объекта, включающий блок обработки информации, функционально связанный с бортовым средством измерения глубин, при этом блок обработки информации содержит один или несколько вычислительных модулей, выполненных в виде процессоров, один или несколько модулей ввода/вывода информации, выполненных с возможностью взаимодействия блока обработки информации с пользователем, а также передачи и вывода информации от блока обработки информации пользователю, один или несколько модулей памяти, функционально связанных с вычислительными модулями и хранящих в себе машиночитаемые инструкции, исполнение которых обеспечивает получение и накопление в модуле памяти данных, содержащих значения измеренных бортовыми средствами глубин в момент обнаружения или оставления подводного объекта, формирование матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта, получение и накопление в модуле памяти данных, содержащих значения измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта, формирование матрицы глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, сравнение матриц между собой путем сравнений комбинаций значений глубин, измеренных в момент обнаружения или оставления подводного объекта с комбинаций значений глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, определение тождественности комбинаций и вычисление вероятности случайности тождественности двух элементов из различных матриц и определение на основании тождественности точек матрицы глубин, измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта и точек матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта.
Машиночитаемый носитель, содержащий машиночитаемые инструкции для реализации способа определения местоположения подводного объекта, исполнение которых в блоке обработки информации обеспечивает: получение и накопление в модуле памяти данных, содержащих значения измеренных бортовыми средствами глубин в момент обнаружения или оставления подводного объекта, формирование матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта, получение и накопление в модуле памяти данных, содержащих значения измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта, формирование матрицы глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, сравнение матриц между собой путем сравнений комбинаций значений глубин, измеренных в момент обнаружения или оставления подводного объекта с комбинаций значений глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, определение тождественности комбинаций, вычисление вероятности случайности тождественности двух элементов из различных матриц и определение на основании тождественности точек матрицы глубин, измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта и точек матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта.
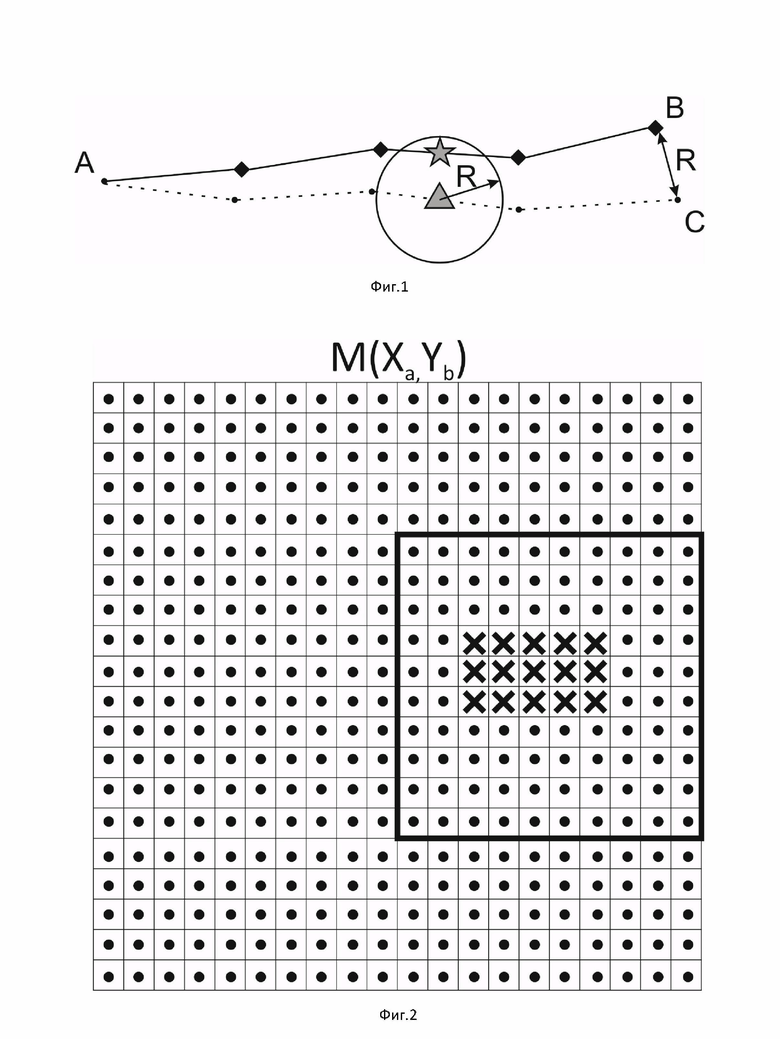
На фиг.1 показана в качестве примера схема движения подводного аппарата по запланированному маршруту, не которой:
- сплошной линией показан спланированный навигационный путь подводного аппаратам из точки А с известными координатами в точку В с запланированными координатами с учетом доступной информации о течениях
- пунктирной линией показан фактический путь подводного аппарата из точки А с известными координатами в точку С под фактическим влиянием течений;
- звездочкой обозначено расчетное положение подводного объекта поиска;
- треугольником обозначено фактическое положение подводного объекта поиска;
- R – расстояние отклонения фактической конечной точки С всплытия подводного аппарата от расчетной В.
На фиг.2 показана матрица М(Xa,Yb), размерностью 20х20 соответствующей площади проведения поисковых работ, на которой выделена матрица Т размерностью 10х10 (выделена сплошной толстой линией), эквивалентная по размерам и дискретности точек промеров матрице L(xi,yi), в которой установлено наибольшее количество тождественных комбинаторных конфигураций значений комбинаторным конфигурациям в матрице L(xi,yi) на таких же позициях.
Осуществление изобретения.
Поиск подводных объектов, оставленных или утерянных при осуществлении подводных миссий в условиях отсутствия возможности определения фактических координат или использования каких-либо реперов, а также повторный выход в точку с неустановленными координатами, где ранее был обнаружен объект или явление, всегда являлся сложнейшей технологической операцией, особенно в глубоководных районах. С учётом размеров объектов поиска использование таких средств обнаружения, как: электромагнитные, оптические и др. будет ограничено приемлемым расстоянием от поискового средства до объекта поиска, что требует предварительного сужения площади поисковых работ до минимально возможных размеров.
Указанные проблемы решаются внедрением описанного ниже способа определения местоположения подводного объекта по тождеству комбинаторных конфигураций значений измеренных глубин в точках с неизвестными координатами.
Известно, что значительная часть поверхности дна океанов и морей представляет собой относительно ровные поверхности с площадями от нескольких сотен до нескольких тысяч квадратных километров – абиссальные равнины в пределах которых измеренные глубины меняются незначительно, варьируя в пределах нескольких метров и средняя глубина поверхности одного квадратного километра дна может оставаться неизменной на площади в сотни квадратных километров. Абиссальные и глубоководные равнины занимают около 40% ложа океанов. В пределах каждой абиссальной равнины можно выделить формы мезорельефа с линейными размерами до 1000-2000 метров и отклонением глубины до 10 метров и более относительно средней глубины равнины. В пределах форм мезорельефа можно выделить микрорельеф с линейными размерами 100-200 метров и отклонением глубины на 1-2 метра относительно средней глубины форм мезорельефа.
Поскольку формы, как мезорельефа, так и микрорельефа, многократно повторяются, их нельзя рассматривать как однозначные орографические реперы даже при наличии установленных координат расположения отдельно взятых форм мезо и микрорельефа. В тоже время, расстояние от водной поверхности до поверхности, например, каждого из ста гектаров дна, составляющих один квадратный километр поверхности дна, является переменной величиной и значительное количество измеренных глубин отличается от средней глубины одного квадратного километра на одинаковые величины, как в положительную, так и в отрицательную сторону. При этом количество гектаров с одинаковыми значениями отклонений измеренных в них глубинах от средней глубины на один квадратный километр может оставаться неизменным в пределах площади в тысячу квадратных километров. То есть в пределах каждого участка дна площадью один квадратный километр может быть, например, 40 гектар с глубиной Нсреднее, двадцать гектар с глубиной Нсреднее –1 метр, двадцать гектар с глубиной Нсреднее +1 метр, десять гектар с глубиной Нсреднее –2 метра и десять гектар с глубиной Нсреднее +2 метра.
Комбинация – комбинаторная конфигурация расстановки измеренных и частично повторяющихся значений глубин НМ по участкам заданной единичной площадью в один гектар в пределах одного квадратного километра поверхности дна, которые отличаются от средней глубины одного квадратного километра дна как в положительную, так и в отрицательную сторону, является практически неповторимой и уникальной для каждого километра поверхности дна на площади в тысячи квадратных километров, при этом допустимо считать, что значения глубин в различных точках одного гектара поверхности дна практически неизменны и могут отличаться от средней глубины одного гектара на несколько сантиметров при попадании лучей эхолота в локальные неоднородности.
В свою очередь, при расстоянии подводного аппарата от поверхности дна, позволяющем получать отраженные сигналы при эхолокации с дискретностью, например, порядка 10 метров, можно выделять совокупности форм микрорельефа.
Расчетное положение подводного аппарата при его движении из точки с известными координатами по участкам маршрута с заданными курсами и скоростями, с учетом доступной информации о течениях, отличается от фактического местоположения за счет фактического влияния течений, которое отличается от учитываемого при расчете курса, и такое отклонение достигает одного километра и более на протяженных маршрутах.
Сущность изобретения заключается в определении местонахождения подводного объекта путем установления тождественности комбинаторной конфигурации значений глубин, измеряемых в момент времени t бортовыми средствами подводного аппарата HLt в точках матрицы L(xi,yi), соответствующей поверхности участка дна над которым находился подводный аппарат при обнаружении/оставлении значимого объекта, с учетом глубины его погружения НПА, с комбинаторными конфигурациями измеряемых значений глубин в точках матрицы , соответствующей поверхности дна над которой осуществляется поиск объекта, в которую вписана окружность с центром в точке расчетного положения подводного аппарата во время обнаружения/оставления значимого объекта и радиусом равным линейной величине отклонения фактического местоположения подводного аппарата от расчетного при завершении подводного маршрута подводного аппарата на котором был обнаружен или оставлен значимый объект, но не менее площади соответствующей матрице , где множество значений матрицы является подмножеством матрицы : , , дискретности точек матриц и кратны друг другу, а глубина в точке матрице - и измеренная глубина  - HLt , с учетом глубины погружения, являются тождественными при выполнении условия:
- HLt , с учетом глубины погружения, являются тождественными при выполнении условия:
 ,
,
где γ - пороговое значение  ,
,  – результирующая среднеквадратическая ошибка измеренной и известной глубин:
– результирующая среднеквадратическая ошибка измеренной и известной глубин:  ,
,  – обратная функция Лапласа.
– обратная функция Лапласа.

где  – интеграл вероятностей с верхней границей интегрирования равной пороговому значению
– интеграл вероятностей с верхней границей интегрирования равной пороговому значению  ,
,  – средняя квадратическая ошибка для значений каждой точки матрицы ,
– средняя квадратическая ошибка для значений каждой точки матрицы ,  – среднеквадратическая ошибка измеренной глубины,
– среднеквадратическая ошибка измеренной глубины,  – уровень значимости,
– уровень значимости,  и считается тождественной та пара комбинаций из матриц для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины матрицы комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеряемых с подводного аппарата глубин в точках матрицы ) с учетом глубины погружения подводного аппарата , с комбинаторными конфигурациями измеренных значений глубин на участках соответствующих матрице может быть оценена с помощью сравнения совокупных ошибок первого рода (вероятности неотождествления пар одинаковых глубин) и ошибок второго рода (вероятностей ложного отождествления пар различных глубин) для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигурации учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений
и считается тождественной та пара комбинаций из матриц для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины матрицы комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеряемых с подводного аппарата глубин в точках матрицы ) с учетом глубины погружения подводного аппарата , с комбинаторными конфигурациями измеренных значений глубин на участках соответствующих матрице может быть оценена с помощью сравнения совокупных ошибок первого рода (вероятности неотождествления пар одинаковых глубин) и ошибок второго рода (вероятностей ложного отождествления пар различных глубин) для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигурации учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений  в этих точках.
в этих точках.
Комбинации ранее измеренных значений глубин на участках, соответствующих поверхности дна, где был обнаружен/оставлен значимый объект, матрицы  известны и получены при съемке многолучевым эхолотом в момент времени t прохождения подводным аппаратом соответствующих отрезков расчетного маршрута. Таким образом формируют матрицу глубин . Значения в точках матрицы , которая соответствует площади поисковых работ, определяются путем съемки многолучевым эхолотом равными галсами, например, через 100 м, начиная из центра площади поисковых работ в точке с расчётным положением объекта поиска, которая определяется с учетом известных координат начала маршрута, пройденных отрезков с различными курсами и скоростями, времени их прохождения и момента обнаружения/оставления объекта поиска. Площадь поисковых работ устанавливается исходя из величины радиуса окружности, соответствующего отклонению фактического положения подводного аппарата при всплытии в точке завершения маршрута, на котором был обнаружен/оставлен объект, относительно расчетного положения подводного аппарата, которое было определено при планировании навигационного пути.
известны и получены при съемке многолучевым эхолотом в момент времени t прохождения подводным аппаратом соответствующих отрезков расчетного маршрута. Таким образом формируют матрицу глубин . Значения в точках матрицы , которая соответствует площади поисковых работ, определяются путем съемки многолучевым эхолотом равными галсами, например, через 100 м, начиная из центра площади поисковых работ в точке с расчётным положением объекта поиска, которая определяется с учетом известных координат начала маршрута, пройденных отрезков с различными курсами и скоростями, времени их прохождения и момента обнаружения/оставления объекта поиска. Площадь поисковых работ устанавливается исходя из величины радиуса окружности, соответствующего отклонению фактического положения подводного аппарата при всплытии в точке завершения маршрута, на котором был обнаружен/оставлен объект, относительно расчетного положения подводного аппарата, которое было определено при планировании навигационного пути.
При движении подводного аппарата по протяженному маршруту и с учетом количества возможных комбинаций частично повторяющихся измеряемых значений глубин HL + НПА в момент времени t в точках измерений оптимальным количеством точек матрицы L(xi,yi) должно быть не менее 100. Как было указано выше, дискретность точек матрицы L(xi,yi) должна соответствовать дискретности точек матрицы М(Xa,Yb), т.е. их дискретности равны или кратны друг другу, при этом кратность преимущественно равна единице. Такой подход позволяет выделить упорядоченные совокупности отклонений измеренных глубин в точках матриц от средних значений для соответствующих поверхностей дна и установить совокупности форм мезорельефа при дискретности полученных значений – порядка 100 метров и микрорельефа при дискретности полученных значений – порядка 10 метров.
Размер матрицы М (Xa,Yb) соответствует участку поверхности дна, над которым проложен маршрут движения подводного аппарата с учетом перекрытия размера матрицы L(xi,yi) при поперечном движении подводного аппарата в зависимости от соотношения средней скорости течений на маршруте и скорости прохождения подводного аппарата расстояния, соответствующего размеру матрицы L(xi,yi).
Для сравнения средних значений комбинаторных конфигураций отклонений измеряемых значений глубин со средними значениями комбинаторных конфигурации отклонений ранее измеренных значений глубин используется проверка статистической гипотезы с использованием двухвыборочного t-критерия Стьюдента.
Степень тождественности комбинаторных конфигураций определяется количеством m тождественных значений на одинаковых позициях в матрице L и отождествляемой с ней матрицей такого же размера T из матрицы M, а вероятность случайной тождественности определяется по формуле:

для m > 1,
где p – вероятность случайности тождественности двух элементов из различных матриц:
,
где – количество сочетаний из по m-2 элементов, – математическое ожидание, - среднеквадратическое отклонение случайной величины от математического ожидания, - пороговое значение для тождественности значений в одной паре, m - общее число установленных тождеств между парами элементов, находящихся в L и T на одинаковых местах, i - порядковый номер последнего из выявленных в ряду N тождества пары элементов, j – порядковый номер в ряду N где находится m-тое тождество пар элементов начиная с последнего в ряду N тождества пары элементов, для чего матрицы L и T состоящие из N элементов каждая, представляются в виде рядов значений распределенных по позициям от 1 до N и при установлении тождественности значений на одинаковых позициях в рядах L и T фиксируются порядковые номера в рядах где было установлено тождество. При этом для любых целых чисел N и m количество размещений без повторений из N по m, где будет расти по мере увеличения быстрее чем количество всех возможных комбинаций из m элементов с любым количеством повторений от 0 до m любого из элементов множества равное до значения и экстремумом для функции ; будет значение стремящееся к при увеличении N.
Для проверки тождественности значений ранее измеренной глубины в точках матрицы и глубины измеренной в тех же точках матрицы бортовым средством подводного аппарата с известной погрешностью, а также с учётом попадания лучей эхолота в локальные неоднородности и вероятных погрешностей измерений в точках матрицы осуществляется проверка статистической гипотезы с использованием критериев Неймана-Пирсона и максимального правдоподобия.
Описанный способ может применяться при поиске подводного объекта с подводного аппарат на значительных площадях путем разделения всей площади работ на маршруты.
В качестве отождествляемых комбинаций глубин в точках матриц и могут использоваться комбинации отклонений измеряемых значений глубин HL в точках матрицы от средних значений глубин в пределах матрицы и комбинации отклонения значений глубин HМ в точках матрицы от средних величин глубины соответствующих участков дна, равных по размерам матрице .
Определение тождественности комбинации измеряемых с подводного аппарата значений глубин HL в точках матрицы L(xi,yj) с комбинациями значений глубин HМ в точках матрицы M(Xa,Yb) могут осуществлять с использованием программного обеспечения, в том числе устанавливающего совпадение значений в точках матрицы L(xi,yj) со значениями в точках матрицы по алгоритму F(xi+k,yj+l)=f(Xa+k,Yb+l), где k и l – целые числа от 0 до 10, xi и yj – целые числа соответствующие количеству точек по оси X и по оси Y матрицы L(xi,yj), а Xa и Yb – целые числа соответствующие количеству точек по оси X и по оси Y матрицы M(Xa,Yb).
В качестве отождествляемых комбинаций значений в точках матриц могут использоваться только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений превышающих среднее, (-) для значений ниже среднего и (0) для значений соответствующих среднему, что позволит учитывать изменения абсолютных величин значений в одних и тех же точках, обусловленные процессами осадконакопления и размыва в период между обнаружением/оставлением значимого объекта и проведением работ по его поиску, поскольку тенденции к накоплению осадка или размыва будут устойчивы, как и знаки отклонения измеряемых значений глубины от средней глубины на соответствующей поверхности дна.
С использованием соответствующего программного обеспечения матрицы и могут быть отображены графически в виде тепловых карт и тогда определение местоположения подводного объекта может осуществляться путём отождествления графических отображений матриц , с использованием методов машинного обучения.
Алгоритм применения способа определения местоположения подводного объекта.
При движении подводного аппарата из точки А (см.Фиг.1) с известными координатами в точку В по навигационному пути (сплошная линия на фигуре), спланированному с учетом имеющейся информации о подводных течениях и рассчитанных изменений (поправок) курса на отдельных отрезках пути, в момент времени t обнаруживается или оставляется значимый объект (обозначено звездочкой). Обнаружение значимого объекта или явления может быть осуществлено как путем регистрации аномалий температуры, солености, химического состава, электромагнитного поля, так и визуально или с помощью акустических датчиков. В момент времени t с целью получения изображения поверхности участка дна, над которым находится подводный аппарат, производится измерение глубин бортовым средством, выполненным, например, в виде многолучевого эхолота. Значения измеренных глубин передают в блок обработки информации, функциональной связанный с упомянутым бортовым средством. В блоке обработки информации с помощью одного или нескольких вычислительных модулей путем исполнения записанных в модуле памяти блока обработки информации машиночитаемых инструкций формируют комбинаторные конфигурации глубин, отображающие множественную совокупность форм мезорельефа или микрорельефа, в зависимости от расстояния подводного аппарата от поверхности дна и дискретности получаемых отраженных сигналов.
С учетом протяженности отрезков маршрута, проложенных с учетом имевшейся информации о течениях, и пройденных различными курсами для компенсации сноса течениями, а также скорости и времени прохождения подводным аппаратом таких отрезков устанавливается расчетное положение подводного аппарата при обнаружении/оставлении значимого объекта на траектории пройденного маршрута из точки погружения с известными координатами до точки всплытия B, в которой также установлены координаты.
При завершении подводного маршрута и всплытии подводного аппарата устанавливаются фактические координаты в точке В и максимальные отклонение расчетных координат на маршруте от фактических.
В блоке обработки информации формируют матрицу , аргументы которой соответствуют значениям глубин, полученным при съемке многолучевым эхолотом при обнаружении/оставлении значимого объекта поиска.
Перед проведением поиска подводного объекта определяют расчетное положение центра района поиска объекта и размеры площади поиска, которая должна быть не менее квадрата с вписанной окружностью радиусом равным максимальному отклонению фактических координат от расчетных на пройденном маршруте или иными словами расстоянию R между расчетной точкой В всплытия подводного аппарата и фактической точкой С его всплытия. Площадь должна быть не менее (кратной) площади съемки в момент обнаружения/оставления значимого объекта поиска.
Осуществляется выход в расчетное положение центра района поиска поискового аппарата, который может быть выполнен как в виде подводного аппарата (обитаемого, необитаемого), так и в виде надводного судна.
С поискового аппарата при его движении галсами через 100 метров, бортовыми средствами, например, многолучевым эхолотом, производят измерение глубин. Значения измеренных глубин передают в блок обработки информации, функциональной связанный с упомянутым бортовым средством. В блоке обработки информации с помощью одного или нескольких вычислительных модулей путем исполнения записанных в модуле памяти блока обработки информации машиночитаемых инструкций из измеренных глубин формируют матрицу и сравнивая комбинаторные конфигурации значений в матрице отождествляют с комбинаторными конфигурациями значений в матрице и устанавливают границы матрицы T (см.Фиг.2), равной по площади матрице , с наибольшим количеством комбинаторных конфигураций значений тождественных комбинаторным конфигурациям матрицы .
При получении значений тождественности, удовлетворяющих устанавливаемым требованиям – вероятностям случайной тождественности, используются специальные средства для выхода непосредственно на объект поиска – визуальная съемка, съемка многолучевым эхолотом с приближением к поверхности дна и максимальной дискретностью отраженных сигналов и др. до момента обнаружения объекта поиска.
Итак, количество элементов N матрицы L = 100, размерность матрицы 10х10. Как было указано выше, расположение (комбинация) элементов матрицы L(xi,yi) (последовательностей значений глубин) является практически уникальной для площади дна в 1 км2.
Сравнивают полученную комбинацию измеряемых с подводного аппарата глубин при поиске объекта c комбинациями ранее измеренных значений глубин на участках обнаружения/оставления объекта путем совмещения матрицы L(xi,yi) с матрицей М(Xa,Yb).
Пример 1:
Пусть N = 100, γ = 0,05, σ = 0,067, p = 0,4, законы распределения двух матриц совпадают.
Вероятность случайной m-тождественности двух матриц изменяется следующим образом:
Пример 2:
Пусть N = 100, γ = 0,05, σ = 0,139, р = 0,2, законы распределения двух матриц совпадают.
Вероятность случайной m-тождественности двух матриц изменяется следующим образом:
Пример 3:
Пусть N = 100, γ = 0,05,  =
=  = 0,
= 0,  = 0,067,
= 0,067,  = 0.139, р = 0,254.
= 0.139, р = 0,254.
Вероятность случайной m-тождественности двух матриц изменяется следующим образом:
Как видно из таблиц в приведенных примерах, вероятность случайной m-тождественности растет с ростом вероятности случайной тождественности двух элементов и убывает с ростом m.
Комплекс для определения местоположения подводного аппарата для реализации способа определения местоположения подводного объекта, содержит блок обработки информации, функционально связанный с бортовым средством измерения глубин, при этом блок обработки информации содержит один или несколько вычислительных модулей, выполненных в виде процессоров, один или несколько модулей ввода/вывода информации, выполненных с возможностью взаимодействия блока обработки информации с пользователем, а также передачи и вывода информации от блока обработки информации пользователю, один или несколько модулей памяти, функционально связанных с вычислительными модулями и хранящих в себе машиночитаемые инструкции, исполнение которых обеспечивает получение и накопление в модуле памяти данных, содержащих значения измеренных бортовыми средствами глубин в момент обнаружения или оставления подводного объекта, формирование матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта, получение и накопление в модуле памяти данных, содержащих значения измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта, формирование матрицы глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, сравнение матриц между собой путем сравнений комбинаций значений глубин, измеренных в момент обнаружения или оставления подводного объекта с комбинаций значений глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, определение тождественности комбинаций и вычисление вероятности случайности тождественности двух элементов из различных матриц, определение на основании тождественности точек матрицы глубин, измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта и точек матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта.
Модули памяти блока обработки информации выполнены в виде энергонезависимой памяти.
Машиночитаемый носитель, содержащий машиночитаемые инструкции для реализации способа определения местоположения подводного объекта, исполнение которых в блоке обработки информации обеспечивает: получение и накопление в модуле памяти данных, содержащих значения измеренных бортовыми средствами глубин в момент обнаружения или оставления подводного объекта, формирование матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта, получение и накопление в модуле памяти данных, содержащих значения измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта,
формирование матрицы глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, сравнение матриц между собой путем сравнений комбинаций значений глубин, измеренных в момент обнаружения или оставления подводного объекта с комбинаций значений глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, определение тождественности комбинаций, вычисление вероятности случайности тождественности двух элементов из различных матриц, определение на основании тождественности точек матрицы глубин, измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта и точек матрицы глубин, измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
Изобретение относится к морской навигации. Технический результат заключается в обеспечении возможности определения местонахождения подводного аппарата относительно места нахождения объекта поиска в подводном состоянии без использования гидроакустических и орографических реперов. Такой результат достигается за счет того, что участок поверхности дна, над которым находится подводный аппарат в момент времени обнаружения или оставления под водой объекта, представляется в виде множества значений измеренных глубин, и местоположение обнаруженного или оставленного подводным аппаратом объекта при повторном выходе к его местонахождению определяют путем установления тождества комбинаторной конфигурации - комбинации значений измеренных при обнаружении или оставлении объекта бортовыми средствами подводного аппарата глубин с учетом глубины погружения подводного аппарата в точках матрицы, соответствующей поверхности участка дна, над которым находился подводный аппарат с одной из равных ей по размеру комбинаций значений глубин, измеряемых при поиске объекта, с учетом глубины погружения подводного аппарата, на такой же площади в точках матрицы, соответствующей поверхности дна в районе поиска. 2 н. и 11 з.п. ф-лы, 2 ил.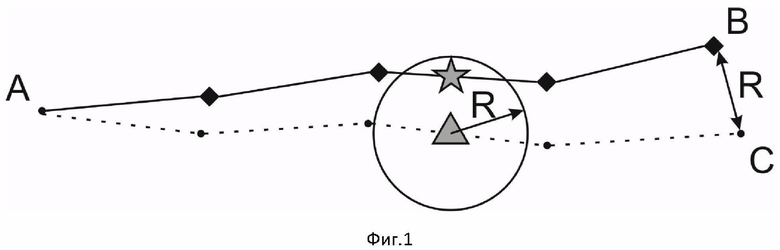
1. Способ определения местоположения подводного объекта, характеризующийся тем, что участок поверхности дна, над которым находится подводный аппарат в момент времени обнаружения или оставления под водой объекта, представляется в виде множества значений измеренных глубин, и местоположение обнаруженного или оставленного подводным аппаратом объекта при повторном выходе к его местонахождению определяют путем установления тождества комбинаторной конфигурации - комбинации значений измеренных при обнаружении или оставлении объекта бортовыми средствами подводного аппарата глубин  с учетом глубины погружения подводного аппарата
с учетом глубины погружения подводного аппарата  , в точках матрицы
, в точках матрицы  , соответствующей поверхности участка дна, над которым находился подводный аппарат в момент
, соответствующей поверхности участка дна, над которым находился подводный аппарат в момент  с одной из равных ей по размеру комбинаций значений глубин
с одной из равных ей по размеру комбинаций значений глубин  измеряемых при поиске объекта, с учетом глубины погружения подводного аппарата, на такой же площади в точках матрицы
измеряемых при поиске объекта, с учетом глубины погружения подводного аппарата, на такой же площади в точках матрицы  , соответствующей поверхности дна в районе поиска, где множество значений матрицы является подмножеством матрицы :
, соответствующей поверхности дна в районе поиска, где множество значений матрицы является подмножеством матрицы :  ,
,  , дискретности точек матриц и
, дискретности точек матриц и  кратны друг другу, при этом тождественной считается та пара комбинаций из матриц
кратны друг другу, при этом тождественной считается та пара комбинаций из матриц  для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма
для которой количество точек с тождественными значениями глубин в одинаковых местах комбинаций максимально, а сумма  для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины в матрице
для каждой пары элементов, стоящих на одинаковых местах в комбинациях, минимальна и степень тождественности комбинаций значений глубины в матрице  комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеренных с подводного аппарата глубин в точках матрицы
комбинациям значений в матрице определяется как отношение количества точек с установленным тождеством к общему количеству точек в матрице , а вероятность ошибочной тождественности комбинаторных конфигураций измеренных с подводного аппарата глубин в точках матрицы  ), с учетом глубины погружения подводного аппарата
), с учетом глубины погружения подводного аппарата  , с комбинаторными конфигурациями значений глубин
, с комбинаторными конфигурациями значений глубин  на участках, соответствующих матрице , может быть оценена с помощью сравнения совокупных ошибок первого рода и ошибок второго рода для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигураций учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы , находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений и в этих точках,
на участках, соответствующих матрице , может быть оценена с помощью сравнения совокупных ошибок первого рода и ошибок второго рода для данных участков, а при установлении одинаковой степени тождественности более чем в одной паре комбинаторных конфигураций учитывается близость их расположения к предыдущей тождественной паре комбинаций и степень отличия значений в точках матрицы от значений в точках матрицы , находящихся на одинаковых позициях в парах отождествляемых комбинаций, но не удовлетворяющих критерию тождественности значений и в этих точках,
при этом в качестве отождествляемых комбинаций значений в точках матриц  могут использоваться только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений, превышающих среднее, (-) для значений ниже среднего и (0) для значений, соответствующих среднему, что позволит учитывать изменения абсолютных величин значений
могут использоваться только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений, превышающих среднее, (-) для значений ниже среднего и (0) для значений, соответствующих среднему, что позволит учитывать изменения абсолютных величин значений  в одних и тех же точках, обусловленные процессами осадконакопления и размыва в период между обнаружением/оставлением значимого объекта и проведением работ по его поиску, поскольку тенденции к накоплению осадка или размыва будут устойчивы, как и знаки отклонения измеряемых значений глубины от средней глубины на соответствующей поверхности дна,
в одних и тех же точках, обусловленные процессами осадконакопления и размыва в период между обнаружением/оставлением значимого объекта и проведением работ по его поиску, поскольку тенденции к накоплению осадка или размыва будут устойчивы, как и знаки отклонения измеряемых значений глубины от средней глубины на соответствующей поверхности дна,
а определение тождественности комбинации измеренных с подводного аппарата значений глубин в точках матрицы с комбинациями значений глубин в точках матрицы осуществляется с использованием программного обеспечения.
2. Способ по п.1, отличающийся тем, что определение местоположения подводного объекта осуществляется в точках с неизвестными координатами в условиях многократно повторяющихся значений глубин.
3. Способ по п.1, отличающийся тем, что количество точек матрицы не должно быть менее 100.
4. Способ по п.1, отличающийся тем, что размер матрицы соответствует участку поверхности дна, над которым проложен маршрут движения подводного аппарата при поиске значимого объекта с учетом перекрытия размера матрицы , и размер участка поверхности дна, над которым проложен маршрут движения подводного аппарата при поиске значимого объекта, устанавливается не менее размера участка поверхности дна, соответствующего матрице , и не менее площади квадрата поверхности дна, в который вписана окружность с центром в точке расчетного положения подводного аппарата во время обнаружения/оставления значимого объекта и с радиусом, равным линейной величине отклонения фактического местоположения подводного аппарата от расчетного, при завершении подводного маршрута подводного аппарата во время обнаружения или оставления значимого объекта.
5. Способ по п.1, отличающийся тем, что для проверки тождественности значений ранее измеренной глубины в точках матрицы и глубины, измеренной в тех же точках матрицы  бортовым средством подводного аппарата с известной погрешностью, а также с учётом попадания лучей эхолота в локальные неоднородности и вероятных погрешностей измерений в точках матрицы
бортовым средством подводного аппарата с известной погрешностью, а также с учётом попадания лучей эхолота в локальные неоднородности и вероятных погрешностей измерений в точках матрицы  осуществляется проверка статистической гипотезы с использованием критериев Неймана-Пирсона и максимального правдоподобия.
осуществляется проверка статистической гипотезы с использованием критериев Неймана-Пирсона и максимального правдоподобия.
6. Способ по п.1, отличающийся тем, что определение тождественности комбинаций измеренных с подводного аппарата значений глубин в точках матрицы с комбинациями значений глубин в точках матрицы осуществляется с использованием программного обеспечения, в том числе устанавливающего совпадение значений в точках матрицы со значениями в точках матрицы по алгоритму  где
где  и
и  – целые числа от 0 до 10,
– целые числа от 0 до 10,  и
и  – целые числа, соответствующие количеству точек по оси
– целые числа, соответствующие количеству точек по оси  и по оси
и по оси  матрицы , а
матрицы , а  и
и  – целые числа, соответствующие количеству точек по оси и по оси матрицы .
– целые числа, соответствующие количеству точек по оси и по оси матрицы .
7. Способ по п.1, отличающийся тем, что в качестве отождествляемых комбинаций глубин в точках матриц и используют комбинации отклонений измеряемых значений глубин в точках матрицы от средних значений глубин в пределах матрицы и комбинации отклонения измеренных значений глубин в точках матрицы от средних величин глубины соответствующих участков дна, равных по размерам матрице .
8. Способ по п.1, отличающийся тем, что для сравнения средних значений комбинаторных конфигураций отклонений измеряемых значений глубин со средними значениями комбинаторных конфигураций отклонений ранее измеренных значений глубин используют проверку статистической гипотезы с использованием двухвыборочного критерия Стьюдента.
9. Способ по п.1, отличающийся тем, что степень тождественности комбинаторных конфигураций значений измеренных глубин определяют количеством m тождественных значений на одинаковых позициях в матрице L и отождествляемой с ней матрицей такого же размера T из матрицы M, а вероятность случайной тождественности определяют по формуле
 ,
,
для m > 1,
где p – вероятность случайности тождественности двух элементов из различных матриц:
 ,
,
где  - количество сочетаний из
- количество сочетаний из  по m-2 элементов,
по m-2 элементов,  - математическое ожидание,
- математическое ожидание,  - среднеквадратическое отклонение случайной величины
- среднеквадратическое отклонение случайной величины  от математического ожидания,
от математического ожидания,  - пороговое значение для тождественности значений в одной паре, m - общее число установленных тождеств между парами элементов, находящихся в L и T на одинаковых местах, i - порядковый номер последнего из выявленных в ряду N тождества пары элементов, j - порядковый номер в ряду N, где находится m-е тождество пар элементов, начиная с последнего в ряду N тождества пары элементов, для чего матрицы L и T, состоящие из N элементов каждая, представляются в виде рядов значений, распределенных по позициям от 1 до N, и при установлении тождественности значений на одинаковых позициях в рядах L и T фиксируются порядковые номера в рядах, где было установлено тождество, при этом для любых целых чисел N и m количество размещений без повторений из N по m, где
- пороговое значение для тождественности значений в одной паре, m - общее число установленных тождеств между парами элементов, находящихся в L и T на одинаковых местах, i - порядковый номер последнего из выявленных в ряду N тождества пары элементов, j - порядковый номер в ряду N, где находится m-е тождество пар элементов, начиная с последнего в ряду N тождества пары элементов, для чего матрицы L и T, состоящие из N элементов каждая, представляются в виде рядов значений, распределенных по позициям от 1 до N, и при установлении тождественности значений на одинаковых позициях в рядах L и T фиксируются порядковые номера в рядах, где было установлено тождество, при этом для любых целых чисел N и m количество размещений без повторений из N по m, где  будет расти по мере увеличения
будет расти по мере увеличения  быстрее, чем количество всех возможных комбинаций из m элементов с любым количеством повторений от 0 до m любого из элементов множества, равное
быстрее, чем количество всех возможных комбинаций из m элементов с любым количеством повторений от 0 до m любого из элементов множества, равное  , до значения
, до значения  и экстремумом для функции
и экстремумом для функции  ;
;  будет значение
будет значение  , стремящееся к
, стремящееся к  при увеличении N.
при увеличении N.
10. Способ по п.1, отличающийся тем, что в качестве отождествляемых комбинаций значений в точках матриц используются только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений, превышающих среднее, (-) для значений ниже среднего и (0) для значений, соответствующих среднему, с возможностью получения отображения поверхности с формами мезо- и микрорельефа.
11. Способ по п.1, отличающийся тем, что матрицы и отображаются графически в виде тепловых карт, а определение местоположения подводного аппарата осуществляют путём отождествления графических отображений матриц и с использованием методов машинного обучения.
12. Способ по п.1, отличающийся тем, что определение местоположения подводного объекта осуществляется в условиях многократно повторяющихся значений глубин в точках с неизвестными координатами.
13. Комплекс для определения местоположения подводного объекта, включающий блок обработки информации, функционально связанный с бортовым средством измерения глубин, при этом блок обработки информации содержит один или несколько вычислительных модулей, выполненных в виде процессоров с возможностью формирования комбинаторных конфигураций глубин, отображающих множественную совокупность форм мезорельефа или микрорельефа, в зависимости от расстояния подводного аппарата от поверхности дна и дискретности получаемых отраженных сигналов, один или несколько модулей ввода/вывода информации, выполненных с возможностью взаимодействия блока обработки информации с пользователем, а также передачи и вывода информации от блока обработки информации пользователю, один или несколько модулей памяти, функционально связанных с вычислительными модулями и хранящих в себе машиночитаемые инструкции, исполнение которых обеспечивает получение и накопление в модуле памяти данных, содержащих значения измеренных бортовыми средствами глубин в момент обнаружения или оставления подводного объекта, формирование матрицы глубин , измеренных в момент обнаружения или оставления подводного объекта, получение и накопление в модуле памяти данных, содержащих значения измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта, формирование матрицы глубин , измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, сравнение матриц и между собой путем сравнений комбинаций значений глубин, измеренных в момент обнаружения или оставления подводного объекта, с комбинаций значений глубин, измеряемых при повторном выходе в район предполагаемого местонахождения подводного объекта, определение тождественности комбинаций и вычисление вероятности случайности тождественности двух элементов из различных матриц, и определение на основании тождественности точек матрицы глубин , измеряемых бортовыми средствами глубин при повторном выходе в район предполагаемого местонахождения подводного объекта, и точек матрицы глубин  , измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта,
, измеренных в момент обнаружения или оставления подводного объекта местонахождения подводного объекта,
при этом в качестве отождествляемых комбинаций значений в точках матриц  могут использоваться только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений, превышающих среднее, (-) для значений ниже среднего и (0) для значений, соответствующих среднему, что позволит учитывать изменения абсолютных величин значений
могут использоваться только комбинации знаков отклонения измеренных глубин от средних значений: (+) для значений, превышающих среднее, (-) для значений ниже среднего и (0) для значений, соответствующих среднему, что позволит учитывать изменения абсолютных величин значений  в одних и тех же точках, обусловленные процессами осадконакопления и размыва в период между обнаружением/оставлением значимого объекта и проведением работ по его поиску, поскольку тенденции к накоплению осадка или размыва будут устойчивы, как и знаки отклонения измеряемых значений глубины от средней глубины на соответствующей поверхности дна,
в одних и тех же точках, обусловленные процессами осадконакопления и размыва в период между обнаружением/оставлением значимого объекта и проведением работ по его поиску, поскольку тенденции к накоплению осадка или размыва будут устойчивы, как и знаки отклонения измеряемых значений глубины от средней глубины на соответствующей поверхности дна,
а определение тождественности комбинаций измеренных с подводного аппарата значений глубин в точках матрицы с комбинациями значений глубин в точках матрицы осуществляется с использованием программного обеспечения.
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| CN 111220146 A, 02.06.2020 | |||
| CN 110220510 A, 10.09.2019 | |||
| JP 5039392 B2, 03.10.2012 | |||
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ | 2014 |
|
RU2555204C1 |
| Способ обхода автономным необитаемым подводным аппаратом неподвижного подводного препятствия | 2021 |
|
RU2768207C1 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |

