Изобретение касается способа управления устройством, которое предназначено для вставления элементов в основание для создания сооружения, и, в частности, касается способа управления устройством типа, описанного в патентной заявке ЕР 0803609 и предназначенного для вставления подкладок при сооружении железнодорожного пути, при этом устройство дает возможность вставлять подкладки в бетон в заданных положениях, которые находятся с точностью размером менее 1 мм. Кроме того, изобретение касается устройства для вставления элементов в основание с использованием такого способа управления.
Устройство для вставления подкладок в бетон, которое дает возможность быстро сооружать железнодорожный путь при низких затратах, известно из документа ЕР 0803609. Однако для того, чтобы быть эффективным, такое устройство для вставления подкладок само должно точно размещаться, чтобы обеспечивать точное расположение каждой подкладки. В настоящее время вставляющее устройство используют вместе с расположенными на стройплощадке направляющими рельсами, точно уложенными вдоль трассы, которой должен следовать железнодорожный путь, относительно фиксированных базовых точек, определенных посредством геодезической съемки и служащих в качестве базы отсчета для точного расположения устройства для вставления подкладок.
Однако недостатком известного способа размещения направляющих рельсов на стройплощадке вдоль трассы железнодорожного пути является то, что он отнимает много времени и, таким образом, значительно замедляет строительство железнодорожного пути. Кроме того, для достижения хорошей точности при размещении вставляющего устройства необходима надлежащая стабилизация грунта, поддерживающего расположенные на стройплощадке направляющие рельсы, чтобы предотвратить перемещение указанных направляющих рельсов под давлением точек опоры, используемых на вставляющем устройстве для определения его положения. Кроме того, работа, обычно проводимая на такой строительной площадке, может привести к случайному смещению направляющих рельсов.
Таким образом, в основу настоящего изобретения положена задача устранения этих недостатков, для чего предлагается способ управления, который дает возможность точно и быстро располагать на основании устройство для вставления элементов и который прост в применении и недорог.
Для решения вышеуказанной задачи согласно изобретению предлагается способ управления устройством, которое предназначено для вставления элементов в основание для создания сооружения, при этом способ отличается тем, что он содержит следующие стадии:
- устанавливают топографические точки и определяют координаты этих точек в системе координат X, Y, Z,
- помещают замерную станцию в месте вблизи сооружения и определяют в координатах X, Y, Z положение замерной станции относительно одной или нескольких топографических точек,
- определяют посредством замерной станции расстояние и угол между устройством для вставления элементов в основание и замерной станцией,
- вычисляют положение вставляющего устройства по измеренному расстоянию и измеренному углу и по известному положению замерной станции, и
- перемещают вставляющее устройство так, чтобы элементы точно совпадали по оси вставления с заданными положениями, где элементы должны быть вставлены в основание.
В конкретных вариантах воплощения изобретения способ управления согласно изобретению может содержать один или несколько нижеследующих отличительных признаков, взятых в отдельности или в любом технически возможном сочетании:
- в замерной станции для оптического измерения используют лазер, взаимодействующий с отражателями, поддерживаемыми вставляющим устройством,
- осуществляют топографические съемки в различных базовых точках, распределенных вдоль сооружения и, по мере того, как вставляющее устройство передвигается вперед, перемещают замерную станцию за топографическую точку, максимально увеличивая точность вычисления, которая может быть достигнута посредством замерной станции,
- для обеспечения точности в размере менее 1 мм при измерении положений элементов, вставляемых в основание, расстояние между двумя последовательными топографическими точками выбирают в пределах 50-100 м,
- перемещением вставляющего устройства управляют бортовым управляющим устройством, соединенным с бортовым компьютером и действующим в соответствии с данными о расстоянии и ориентации, передаваемыми замерной станцией компьютеру в каждый момент времени, для приведения элементов, поддерживаемых вставляющим устройством, по существу в точное совпадение по оси вставления с заданными положениями, координаты которых хранятся в памяти компьютера,
- во вставляющем устройстве используют рычаг, поддерживающий элементы и приводимый в прямолинейное и вращательное движение по трем взаимно перпендикулярным осям, и посредством компьютера управляют движением рычага для приведения элементов в точное совпадение по оси вставления с заданными положениями, и
- сооружением является железнодорожный путь, а элементами - подкладки, предназначенные для поддержания рельса и вставляемые в бетонную плиту до схватывания бетона.
Кроме того, согласно изобретению предлагается вставляющее устройство для вставления, по крайней мере, одного элемента в основание и для осуществления вышеописанного способа управления, отличающееся тем, что оно содержит, по крайней мере, один отражатель, предназначенный для отражения излучения от замерной станции и дающий возможность точно определять расстояние и угол между отражателем и замерной станцией.
В конкретных вариантах воплощения изобретения вставляющее устройство согласно изобретению для вставления элементов в основание может содержать один или несколько нижеследующих отличительных признаков, взятых в отдельности или в любом технически возможном сочетании:
- устройство содержит рычаг, приводимый в прямолинейное или вращательное движение по трем взаимно перпендикулярным осям, поддерживающий элементы, предназначенные для вставления в основание, и содержащий отражатели, дающие возможность посредством замерной станции узнавать положения в трех измерениях рычага и элементов, подлежащих вставлению в основание,
- устройство содержит приводные и/или управляемые колеса или гусеничные цепи для образования транспортного средства, которое может автономно передвигаться и шасси которого снабжено отражателем,
- транспортное средство содержит компьютер, получающий данные от замерной станции, вычисляющий положение транспортного средства и рычага и посылающий сигналы к управляющему устройству для управления перемещением транспортного средства и рычага для обеспечения вставления элементов в основание в заданных местах, и
- указанные элементы выполнены в виде подкладок, предназначенных для поддержания железнодорожного рельса и вставляемых в бетонную плиту до схватывания бетона.
Решаемые задачи, отличительные признаки и преимущества настоящего изобретения будут лучше понятны при прочтении нижеследующего описания варианта воплощения изобретения, приведенного в качестве не ограничительного примера, и со ссылкой на сопровождающие чертежи, на которых:
фиг.1 изображает схематический вид в разрезе устройства для вставления подкладок, предназначенных для поддержания железнодорожного рельса, при использовании способа управления согласно предшествующему уровню техники,
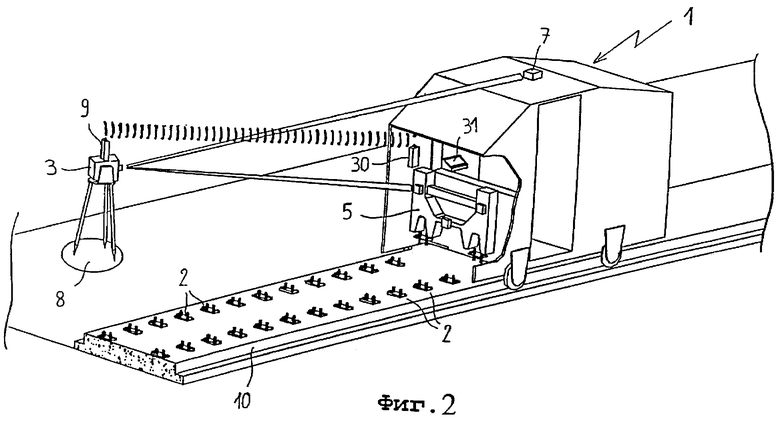
фиг.2 - перспективный вид устройства для вставления подкладок при использовании способа управления согласно конкретному варианту воплощения изобретения,
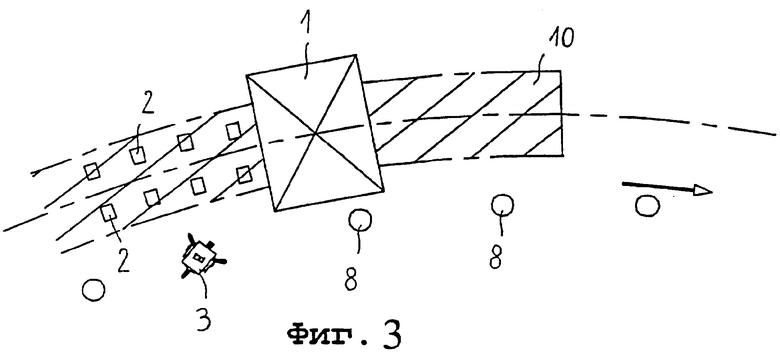
фиг.3 - схематический вид сверху устройства для вставления подкладок с фиг.2 на повороте,
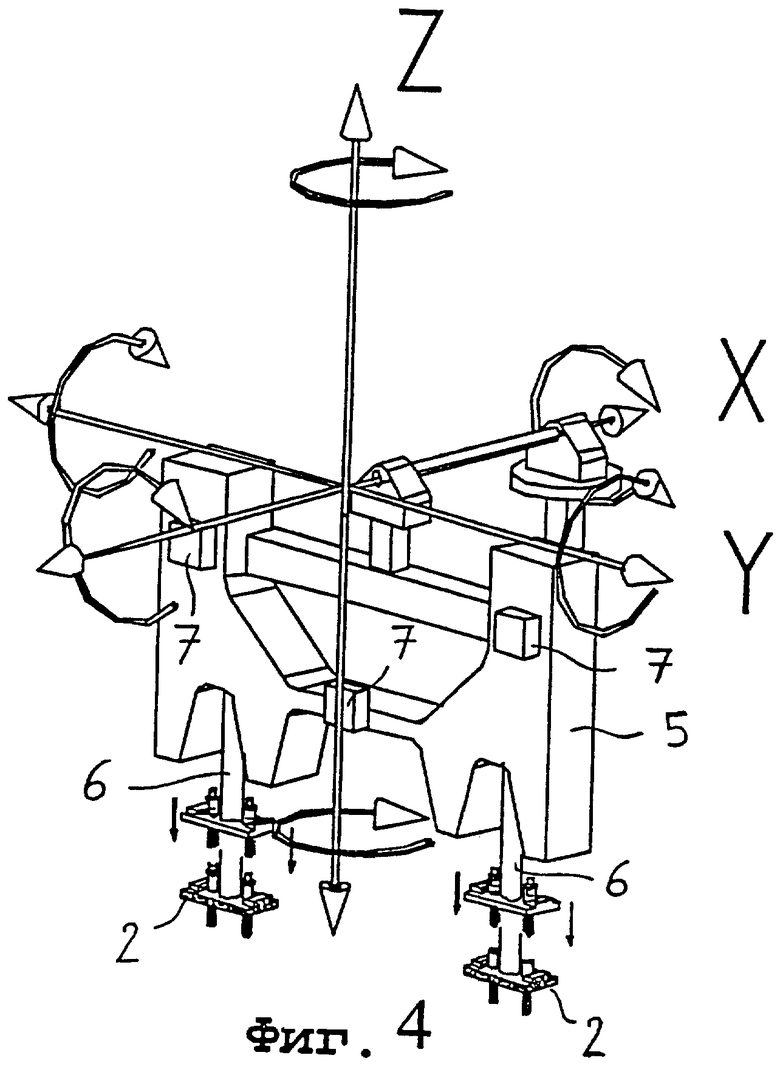
фиг.4 - подробный вид шарнирно-сочлененного рычага устройства для вставления подкладок с фиг.2, и
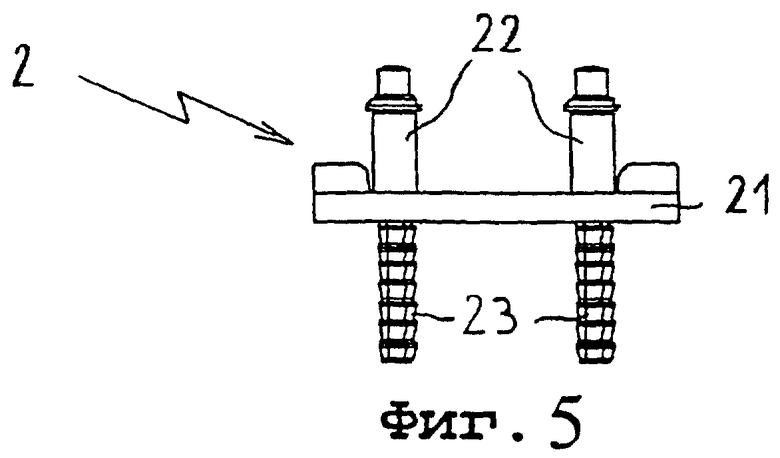
фиг.5 показывает пример подкладки, которая может быть использована при строительстве железнодорожного пути.
Чтобы облегчить понимание чертежей, показаны только те элементы, которые необходимы для понимания.
На фиг.1 показано транспортное средство 11 для транспортировки устройства для вставления подкладок, которое направляется на место согласно способу по предшествующему уровню техники, при этом устройство находится над бетонной плитой 10 до схватывания бетона. На фиг.1 транспортное средство 11 для вставления подкладок вдоль трассы железнодорожного пути управляется посредством двух установленных на стройплощадке направляющих рельсов 12, расположенных с каждой стороны бетонной плиты 10 и служащих в качестве базы отсчета для точного расположения транспортного средства 11. Это транспортное средство 11 для вставления подкладок снабжено колесом 13 для удержания транспортного средства 11 на рельсе 12, при этом колесо опирается на верхнюю поверхность одного из направляющих рельсов 12 и служит в качестве базы отсчета по оси вставления Z, и двумя удерживающими колесами 13, опирающимися сбоку с каждой стороны второго направляющего рельса 12, давая возможность базировать транспортное средство 11 в плоскостях X, Y, перпендикулярной к оси вставления Z.
Такой способ управления имеет недостаток в том, что необходимо заранее укладывать направляющие рельсы на строительной площадке, что является длительной и тщательной операцией, значительно замедляющей темпы строительства железнодорожного пути.
На фиг.2 и 3 показано устройство 1 для вставления подкладок 2, которое направляют вдоль трассы железнодорожного пути при конкретном осуществлении способа управления согласно изобретению.
На фиг.2 устройство для вставления подкладок 2 представляет собой транспортное средство 1, установленное на четырех колесах, два из которых являются управляемыми колесами и два других - приводными колесами, дающими возможность транспортному средству 1 автономно передвигаться в заданном направлении. Транспортное средство 1 на задней стороне снабжено рычагом 5, который приводится в прямолинейное и вращательное движение по трем прямоугольным координатным осям X, Y и Z и который снабжен механизмом, делающим возможным очень точные перемещения.
Рычаг 5, собственно показанный на фиг.4, имеет по существу Н-образную форму и в своей нижней части поддерживает два исполнительных механизма 6, имеющие соответствующие подкладки 2 для вставления в только что отлитую бетонную плиту, скрепленную своими концами, при этом две подкладки 2 удерживаются рычагом 5 друг от друга на расстоянии, которое соответствует ширине колеи укладываемого железнодорожного пути. Рычаг 5 снабжен двумя угломерами (не показаны), которые постоянно измеряют ориентацию рычага 5 относительно осей Х и Y.
Подкладки 2, одна из которых собственно показана на фиг.5, являются подкладками обычного типа и содержат пластину 21, изготовленную из жесткого материала, как например, чугуна, и два крепежных средства 22, каждое из которых представляет собой снабженный резьбой стержень, дающий возможность закреплять рельс гайками на подкладке 2. Кроме того, подкладка 2 содержит два анкерных болта 23 по существу цилиндрической формы, обеспечивающих удержание самой указанной подкладки на бетонной плите 10 после схватывания бетона.
На фиг.4 рычаг 5 на своей задней стороне содержит три отражателя 7, предназначенные для взаимодействия с замерной станцией 3, установленной рядом с укладываемым железнодорожным путем. Кроме того, на крыше транспортного средства 1 установлен отражатель 7.
Замерная станция 3, расположенная рядом с трассой железнодорожного пути, установлена на треноге, которая по вертикали выше топографической точки 8. Замерная станция 3 содержит лазерный дальномер, снабженный светоизлучателем и светоприемником, дающими возможность очень точно узнавать о расстоянии и угле между замерной станцией и группой отражателей 7, поддерживаемых рычагом 5 и транспортным средством 1. В качестве лазерного дальномера используется, например, устройство, продаваемое компанией «Лейка» под наименованием «ТС/ТСА 2003».
Замерная станция 3, кроме того, содержит радиопередатчик 9, который посылает результаты измерений, выполняемых лазерным дальномером в каждый момент времени, к приемнику 30 на транспортном средстве 1. Приемник 30 на транспортном средстве 1 соединен с компьютером 31, который находится на борту транспортного средства 1 и вычисляет точное положение рычага 5 в трех измерениях по информации, посланной замерной станцией 3, и по известному положению топографической точки 8. Компьютер 31 соединен с управляющим устройством (не показано), которое управляет перемещением рычага 5 и исполнительных механизмов 6, а также управляет двигателями, дающими возможность направлять и передвигать транспортное средство.
Ниже описывается способ управления устройством для вставления подкладок.
Как показано на фиг.3, перед стадией вставления подкладок 2 последовательно определяют множество топографических точек вдоль трассы железнодорожного пути с интервалами около 50-100 м и обозначают эти точки знаками 8.
Для вставления подкладок 2 подводят транспортное средство 1, используемое для их вставления, к части пути, где только что была отлита бетонная плита 10, бетон которой еще не схвачен. Затем устанавливают замерную станцию 3 в топографической точке 8, ближайшей к этому исходному положению транспортного средства и находящейся в прямой видимости с задней стороны транспортного средства 1 и, в частности, от отражателей 7 на рычаге 5 и транспортном средстве 1. Замерную станцию 3 очень точно устанавливают в точке 8, размещая ее по вертикали над точкой 8, при этом координаты X, Y, Z замерной станции определяют, измеряя рейкой вертикальное расстояние между замерной станцией и точкой 8. В другом варианте осуществления способа согласно изобретению замерная станция 3, с другой стороны, может быть в любой точке вблизи железнодорожного пути и находиться в прямой видимости от отражателей 7, при этом координаты X, Y, Z замерной станции в таком случае определяют, используя замерную станцию, находящуюся в видимости с различных известных топографических точек, и определяя точное положение замерной станции 3 по измеренным углам и расстояниям.
После того, как стало известно положение замерной станции 3, направляют лазерный дальномер на заднюю сторону транспортного средства 1 так, чтобы он мог измерять расстояние и угол между собой и каждым из отражателей 7, в частности, отражателем 7, расположенным на крыше транспортного средства 1.
Результаты измерения немедленно передаются по радио от передатчика 9 к компьютеру 31, который расположен на борту транспортного средства 1 и вычисляет точное положение в трех измерениях транспортного средства 1 по данным, посланным замерной станцией 3, и по известному положению замерной станции 3.
Так как в память компьютера 31 предварительно введены точные координаты точек, где должны быть вставлены подкладки 2, то компьютер 31 по указанным точкам и по положению транспортного средства 1, измеренному замерной станцией, вычисляет расстояние между рычагом 5 и местом, в котором должны быть вставлены следующие подкладки 2, при этом рычаг находится в исходном положении, из которого он может перемещаться на несколько сантиметров (см) и с шестью степенями свободы. При этом компьютер 31 посылает сигналы к управляющему устройству, которое управляет приводными и управляемыми колесами для перемещения транспортного средства 1 вдоль оси пути, пока шарнирно-сочлененный рычаг 5, который остается неподвижным в его исходном положении, не окажется по существу над точками, где теоретически должны быть вставлены подкладки. Конечно, ввиду люфта, существующего в передаче транспортного средства 1, размещение транспортного средства относительно пути, таким образом, не является очень точным, т.е. точность находится в пределах около 1 см.
После того, как транспортное средство 1 остановится в указанном положении, компьютер 31 проверяет положение в трех измерениях рычага 5 по данным, переданным замерной станцией 3, и посылает сигналы к управляющему устройству для управления движением шарнирно-сочлененного рычага 5 на шести осях свободы, чтобы привести подкладки 2, поддерживаемые рычагом 5, в точное совпадение с теоретическими точками вставления подкладок 2 и для выполнения этого с очень хорошей точностью. Затем приводятся в действие исполнительные механизмы 6 для вставления подкладок 2 в мягкий бетон 10, следуя способу, описанному в патентной заявке ЕР 0803609.
После вставления двух подкладок 2 рычаг 5 возвращается в свое исходное положение и компьютер 31 осуществляет поиск координат следующих точек, где должны быть вставлены новые подкладки 2. Способ управления для приведения транспортного средства 1 в точное совпадение с указанными новыми точками сходен с вышеописанным способом.
Чтобы поддерживать достаточную точность при управлении транспортным средством 1 для вставления подкладок и тем самым при размещении подкладок достигать точности в размере менее 1 мм, замерную станцию 3 регулярно переводят на топографическую точку 8, которая является ближайшей к транспортному средству 1 и которая находится в прямой видимости от группы отражателей 7.
Преимущество такого способа управления заключается в том, что он является очень быстрым в эксплуатации и недорогим в применении, требует только размещения топографических точек с интервалами 50-100 м и установки замерной станции только тогда, когда необходимо вставлять подкладки. Кроме того, преимуществом такого способа управления является то, что отсутствует непосредственный контакт между устройством для вставления подкладок и используемой системой отсчета, что, таким образом, устраняет физические напряжения, которые могут возникнуть под действием устройства для вставления подкладок на систему отсчета.
Конечно, изобретение не ограничивается описанным и показанным вариантом его воплощения, который приведен только в качестве примера.
Таким образом, в этом примере описывается устройство для вставления подкладок в бетонную плиту, но способ управления согласно изобретению в равной степени может быть использован для управления устройством для вставления любого элемента, необходимого для создания сооружения.
В непоказанных вариантах воплощения изобретения вставляющее средство могло быть снабжено гусеничными цепями вместо колес или любым другим средством, дающим вставляющему средству возможность передвигаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УСТАНОВКИ ЭЛЕМЕНТОВ В ОСНОВАНИЕ | 2007 |
|
RU2430209C2 |
| СПОСОБ СООРУЖЕНИЯ РЕЛЬСОВОГО ПУТИ, КОНСТРУКЦИЯ РЕЛЬСОВОГО ПУТИ, СООРУЖАЕМАЯ ЭТИМ СПОСОБОМ, И ПРОМЕЖУТОЧНОЕ РЕЛЬСОВОЕ СКРЕПЛЕНИЕ | 2011 |
|
RU2454500C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2385446C2 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕСУРСОВ В ПРЕДЕЛАХ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2006 |
|
RU2473443C2 |
| СИСТЕМА ДЛЯ ЗАКРЕПЛЕНИЯ РЕЛЬСОВ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2621929C1 |
| СПОСОБ ОЦЕНКИ КОРРОЗИОННОГО ПОВРЕЖДЕНИЯ ПОДОШВЫ РЕЛЬСА | 2010 |
|
RU2441789C2 |
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ В ДВИЖЕНИИ И СТАТИКЕ С ПРИМЕНЕНИЕМ РЕЛЬСОВОЙ ПОДКЛАДКИ | 2008 |
|
RU2376560C1 |
| СПОСОБ ПОТОЧНОЙ СБОРКИ СТРЕЛОЧНЫХ ПЕРЕВОДОВ | 2008 |
|
RU2374377C2 |
| Бетонная шпала | 1987 |
|
SU1667635A3 |
Изобретения относятся к способу управления устройством, предназначенному для вставления элементов в основание для создания сооружения, и устройству для вставления. Способ управления устройством для вставления элементов содержит следующие этапы: устанавливают топографические точки и определяют координаты этих точек в системе координат X, Y, Z, помещают замерную станцию в месте вблизи сооружения и определяют в координатах X, Y, Z положение указанной замерной станции относительно по меньшей мере одной топографической точки, определяют посредством указанной замерной станции расстояние и угол между указанным вставляющим устройством и замерной станцией, вычисляют положение устройства по измеренному расстоянию и известному положению замерной станции, перемещают вставляющее устройство так, чтобы указанные элементы точно совпадали по оси вставления с заданными положениями, где элементы должны быть вставлены в основание. Устройство для вставления содержит рычаг, выполненный с возможностью приведения в прямолинейное и вращательное движение по трем взаимно перпендикулярным осям, поддерживающий элементы, предназначенные для вставления в основание, и содержащий отражатели, выполненные с возможностью посредством замерной станции определения положений в трех измерениях указанного рычага и указанных элементов. Техническим результатом изобретений является возможность точно и быстро располагать на основании устройство для вставления элементов, простота в применении и уменьшение стоимости. 2 н. и 9 з.п. ф-лы, 5 ил.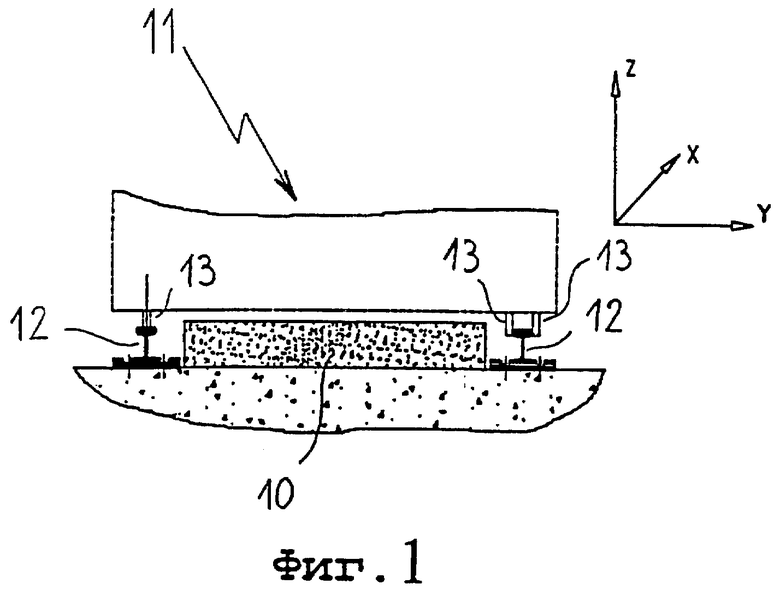
| ЕР 0803609 A3, 29.10.1997 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| ТАБЛЕТИРОВАННЫЙ КОФЕЙНЫЙ ПРОДУКТ | 2017 |
|
RU2701968C2 |
| US 3462845 A, 26.08.1969 | |||
| US 5983511 А, 16.11.1999. | |||

