Область техники
Настоящее изобретение относится к устройству-манипулятору типа «мышь» (далее по тексту - манипулятор-мышь, компьютерная мышь, мышь), используемому в составе оборудования для обработки информации, такого как персональный компьютер, а конкретнее, к манипулятору-мыши, которую не требуется перемещать за пределы ограниченной области, чтобы вызвать последовательное перемещение указателя (курсора на экране компьютера), при этом ее можно с удобством использовать, поскольку не требуется пространство, большее, чем эта ограниченная область, в то же время она может использоваться и как традиционная компьютерная мышь в соответствии с выбором пользователя.
Уровень техники
Манипуляторы типа мышь делятся на механические, оптические и оптико-механические конструкции. Манипулятор - механическая мышь - детектирует сдвиг шарика, установленного в ее нижней части, что вызывает перемещение указателя или курсора в ответ на детектированный сдвиг шарика. В манипуляторе - оптической мыши - для детектирования сдвига используется свет. При перемещении оптической мыши по структурированной подложке фоточувствительный элемент, установленный на нижней стороне мыши, детектирует сдвиг оптической мыши в соответствии с изменением рельефа подложки, вызывая при этом перемещение указателя в ответ на перемещение мыши. В оптико-механической мыши используется фоточувствительный элемент, в котором имеется щель для детектирования сдвига. Фоточувствительный элемент детектирует сдвиг мыши в соответствии с перемещением ролика, вызывая при этом перемещение указателя в ответ на перемещение мыши.
Как описано выше, в известном уровне техники используется такая схема, при которой манипулятор-мышь детектирует сдвиг, когда пользователь перемещает мышь, что вызывает перемещение указателя в ответ на это перемещение.
Соответственно, в случае перемещения указателя с использованием традиционного манипулятора-мыши необходимо располагать пространством, в котором эта мышь может перемещаться.
Техническая проблема
Однако окружающая обстановка, в которой используется мышь, не всегда может обеспечить достаточное пространство для свободного перемещения мыши. При отсутствии достаточного пространства для перемещения мыши пользователь не может свободно перемещать указатель.
Более того, когда пользователь работает с компьютером в течение длительного времени, становится неудобным приводить в движение традиционное устройство-мышь на опорной поверхности или коврике, имеющих поверхность с трением. Соответственно, повышается ощущение усталости в запястье, и часто появляются жалобы на боль в этой области.
Вместе с тем, компьютеры типа «ноутбук» используются в окружающей обстановке, которая не обеспечивает достаточное пространство для перемещения мыши. Из-за этой проблемы в компьютерах типа «ноутбук» используется шаровой манипулятор «трекбол», в котором для перемещения указателя используется перекатываемый шарик, или манипулятор типа сенсорной панели. Однако ни трекболом, ни сенсорной панелью не так просто пользоваться, и, таким образом, они редко используются в других случаях, помимо компьютеров типа «ноутбук».
Техническое решение
В соответствии с разновидностью данного изобретения представлен манипулятор-мышь для обеспечения перемещения указателя или курсора компьютера. Мышь содержит в своем составе корпус с предусмотренным в нем приемным узлом; основную часть мыши, смонтированную внутри приемного узла (приемный узел, по существу, является посадочным местом для основной части мыши), и средства детектирования (датчик-преобразователь), расположенные на внутренней стенке приемного узла, при этом датчик предназначен для детектирования сдвига основной части мыши, когда на него нажимает основная часть мыши, что приводит, таким образом, к перемещению указателя.
В соответствии с другой разновидностью изобретения представленная мышь содержит в своем составе: корпус с предусмотренным в нем приемным узлом; основную часть мыши, установленную в приемном узле с возможностью отделения; датчик давления, расположенный на внутренней стенке приемного узла, с целью генерации сигнала на перемещение указателя, соответствующего детектированию сдвига основной части мыши при нажатии на него (на датчик) основной частью мыши, и датчик сдвига, расположенный на нижней стороне основной части мыши, с целью генерации сигнала на перемещение указателя, сооветствующего детектированному сдвигу основной части мыши, когда основная часть мыши отделена от корпуса.
В соответствии со следующей разновидностью изобретения представленная мышь содержит в своем составе: корпус с предусмотренным в нем приемным узлом; основную часть мыши, прикрепленную к приемному узлу с возможностью отделения; датчик давления, расположенный на внутренней стенке приемного узла, с целью генерации сигнала на перемещение указателя, соответствующего детектированному сдвигу основной части мыши при его (датчика) контакте с основной частью мыши, и датчик сдвига, расположенный на нижней стороне корпуса, с целью генерации сигнала на перемещение указателя, соответствующего детектированному сдвигу корпуса.
В соответствии с еще одной разновидностью изобретения представленная мышь содержит в своем составе: корпус с датчиком давления, расположенным наверху поверхности корпуса, при этом датчик давления генерирует сигнал на перемещение указателя, соответствующий детектированию приложенного сбоку контактного давления; основную часть мыши, смонтированную наверху поверхности корпуса, имеющую выемку, выполненную на ее нижней стороне, для размещения датчика давления, и датчик сдвига, размещенный на нижней стороне основной части мыши, с целью генерации сигнала на перемещение указателя, соответствующего детектированию сдвига основной части мыши, когда основная часть мыши отделена от корпуса.
В соответствии с другой разновидностью изобретения представленная мышь содержит в своем составе: основную часть мыши, снабженную датчиком давления, предусмотренным на ее нижней стороне, при этом датчик давления генерирует сигнал на перемещение указателя, соответствующий детектированию приложенного сбоку контактного давления; корпус с выемкой в его верхней части для размещения датчика давления, при этом основная часть мыши смонтирована на верхней части корпуса, и датчик сдвига, расположенный на нижней стороне корпуса, с целью генерации сигнала на перемещение указателя, соответствующего сдвигу корпуса.
В соответствии со следующей разновидностью изобретения представленная мышь содержит в своем составе: корпус, расположенный на опорной поверхности, основную часть мыши, расположенную на наружной части корпуса, и датчик давления, выступающий наружу из одного из элементов - корпуса или основной части мыши, при этом другой (оставшийся) элемент - корпус или основная часть мыши - выполнен с выемкой, в которой размещен датчик давления, причем датчик давления генерирует сигнал на перемещение указателя, соответствующий детектированию контактного давления на внутреннюю стенку выемки.
В соответствии с еще одной разновидностью изобретения представленная мышь содержит в своем составе: корпус, расположенный на опорной поверхности; основную часть мыши, расположенную на наружной части корпуса; выступ, выступающий наружу из одного из элементов - корпуса или основной части мыши, при этом в другом из оставшихся элементов - корпусе или основной части мыши - выполнена выемка для размещения указанного выступа, и датчик, расположенный на внешнем боковом участке выступа или на внутреннем боковом участке выемки, причем датчик генерирует сигнал на перемещение указателя, соответствующий детектированию контактного давления между выступом и выемкой.
Описание чертежей
На фиг.1 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий первый вариант осуществления (реализации) манипулятора-мыши, в соответствии с изобретением.
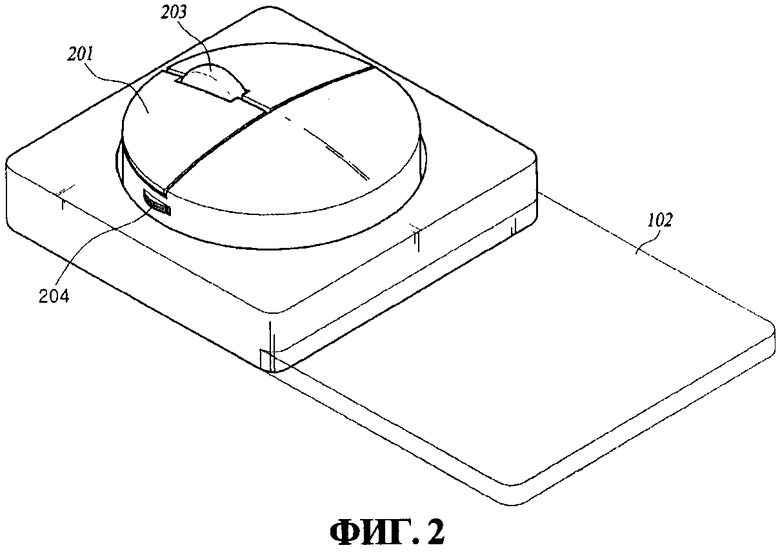
На фиг.2 представлен вид в перспективе, иллюстрирующий первый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
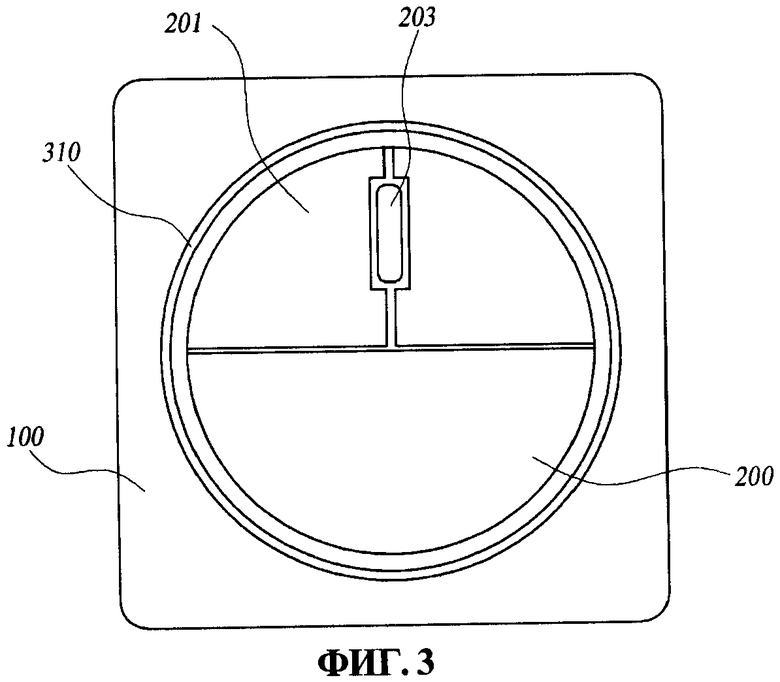
На фиг.3 представлен вид сверху, иллюстрирующий первый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
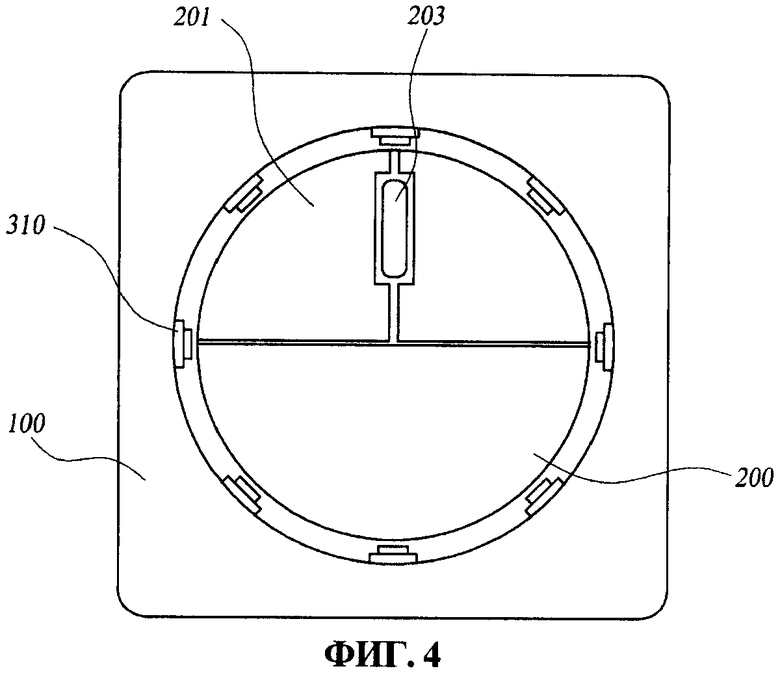
На фиг.4 представлен вид сверху, иллюстрирующий второй вариант осуществления манипулятора-мыши, в соответствии с изобретением.
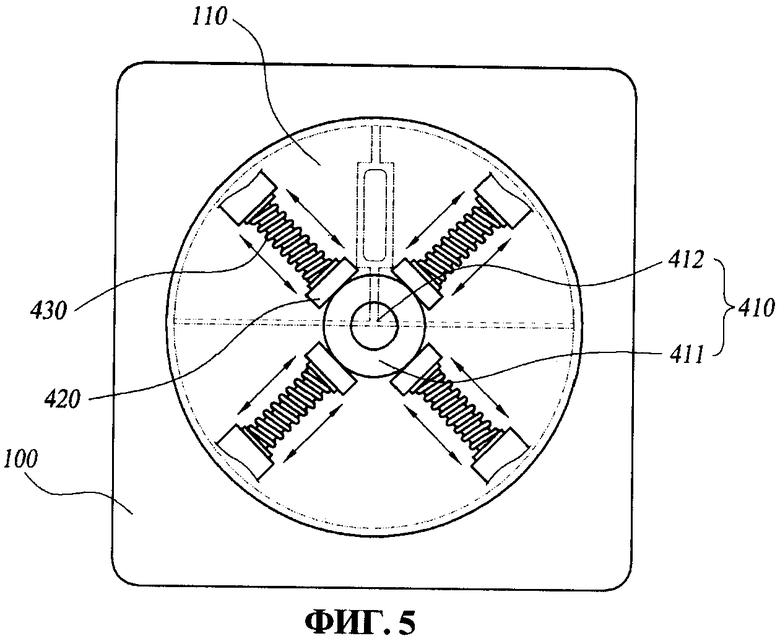
На фиг.5 представлен вид сверху, иллюстрирующий упругое средство из второго варианта осуществления манипулятора-мыши, в соответствии с изобретением.
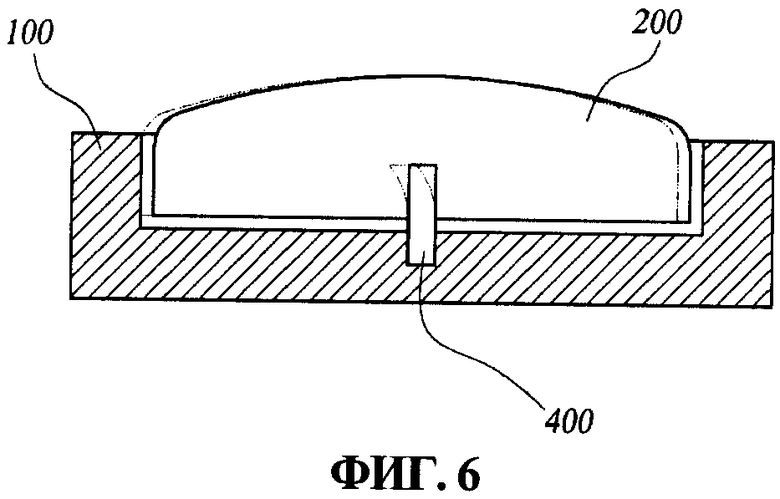
На фиг.6 представлен вид сбоку по вертикали, иллюстрирующий третий вариант осуществления манипулятора-мыши, в соответствии с изобретением.
На фиг.7 представлен вид в перспективе, иллюстрирующий применение, в соответствии с которым манипулятор-мышь по данному изобретению прикреплена к клавиатуре.
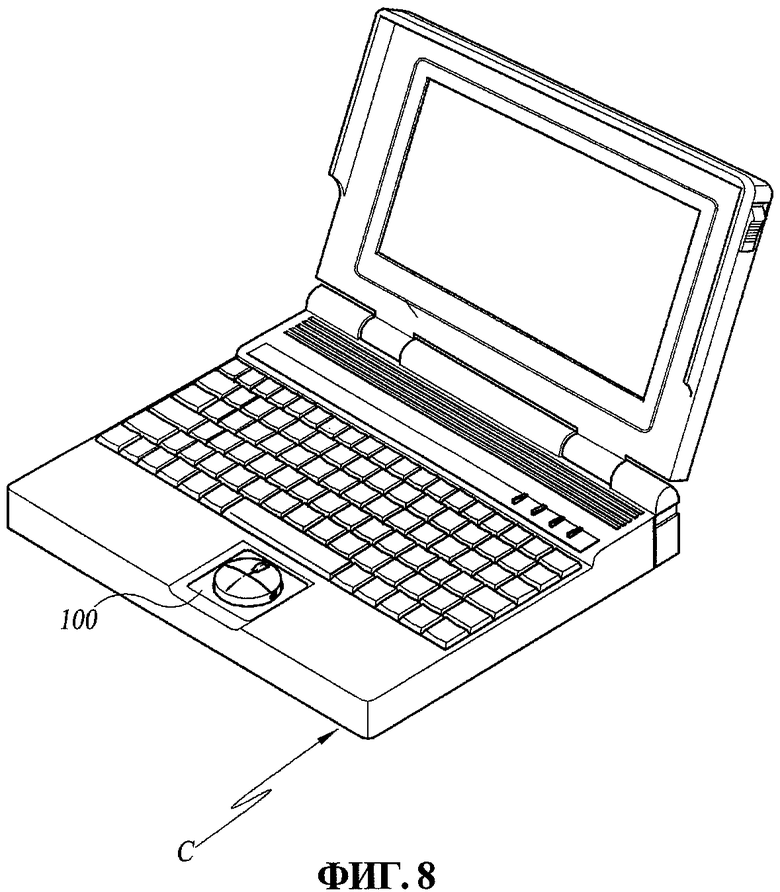
На фиг.8 представлен вид в перспективе, иллюстрирующий еще одно применение, в соответствии с которым манипулятор-мышь по данному изобретению установлена в компьютер типа «ноутбук».
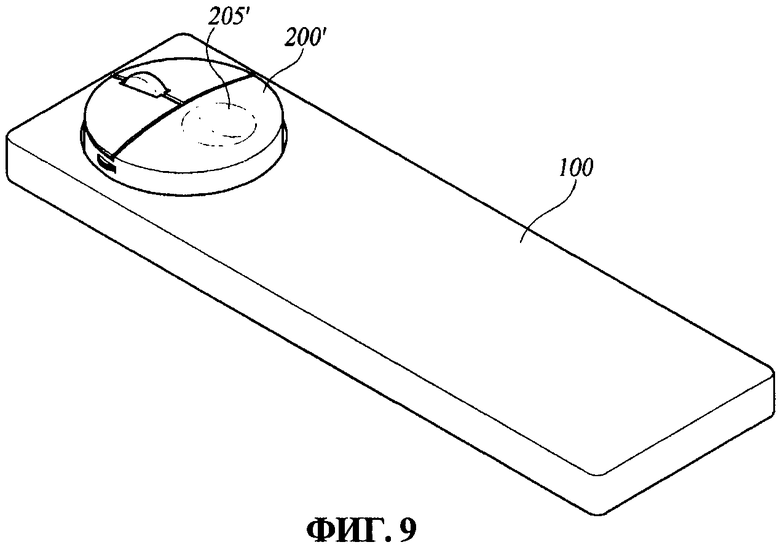
На фиг.9 представлен вид в перспективе, иллюстрирующий альтернативную форму корпуса манипулятора-мыши, в соответствии с изобретением.
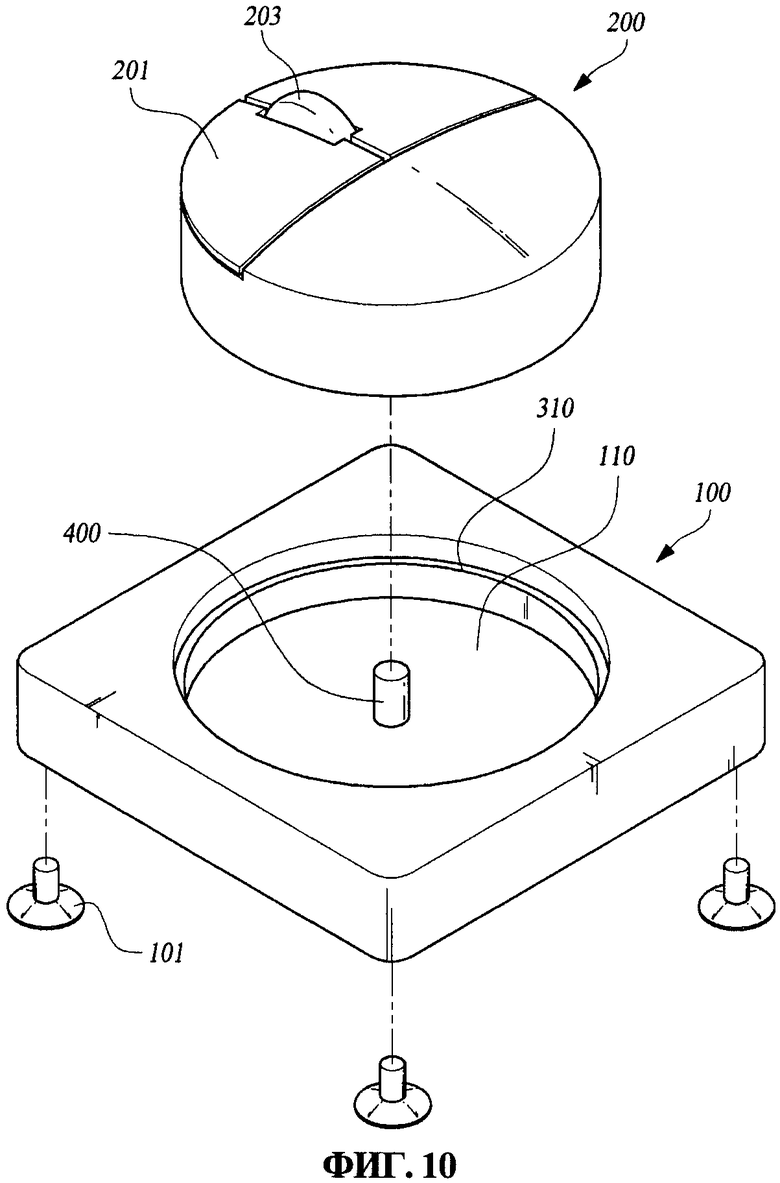
На фиг.10 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий четвертый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
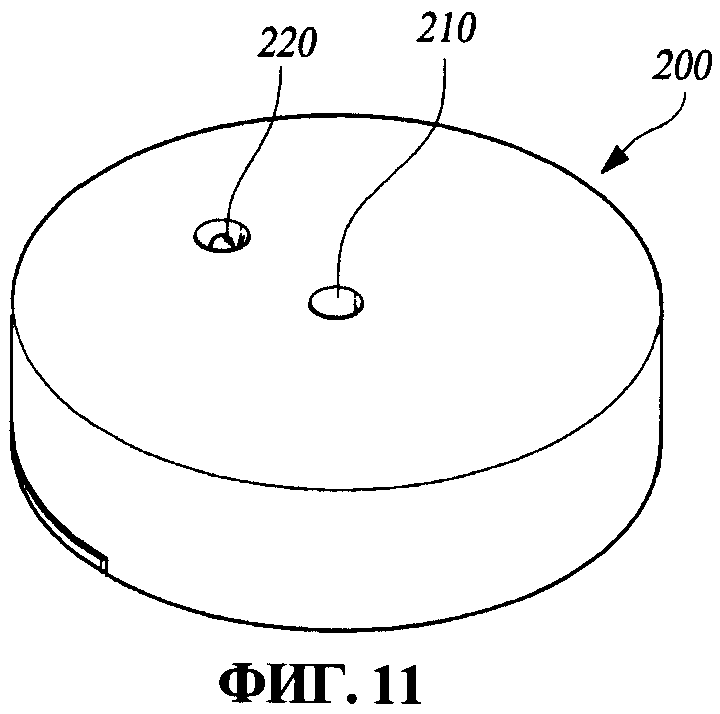
На фиг.11 представлен вид снизу в перспективе, иллюстрирующий основную часть мыши по четвертому варианту осуществления манипулятора- мыши, в соответствии с изобретением.
На фиг.12 представлен вид в поперечном разрезе, иллюстрирующий четвертый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
На фиг.13 представлен вид в поперечном разрезе, иллюстрирующий пятый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
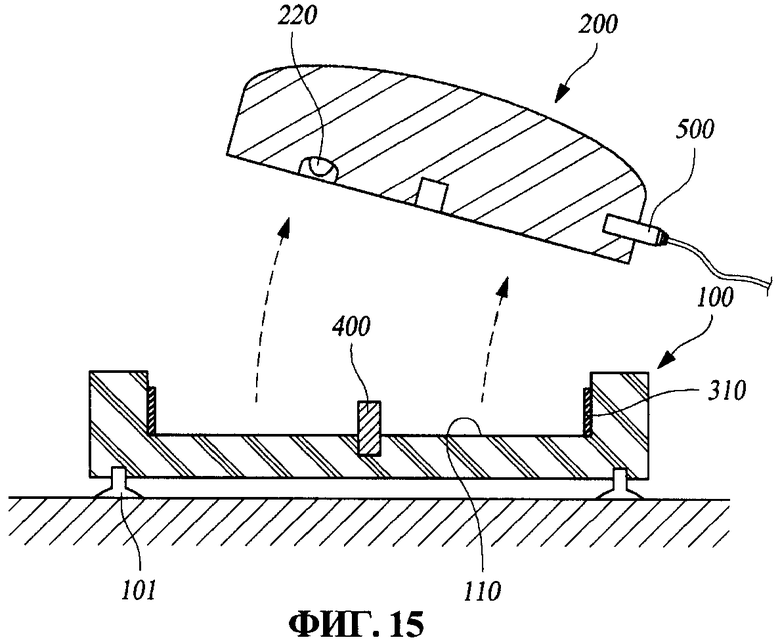
На фиг.14 и 15 представлены виды в поперечном разрезе, иллюстрирующие узел подключения сигнального кабеля в четвертом варианте осуществления манипулятора-мыши, согласно изобретению.
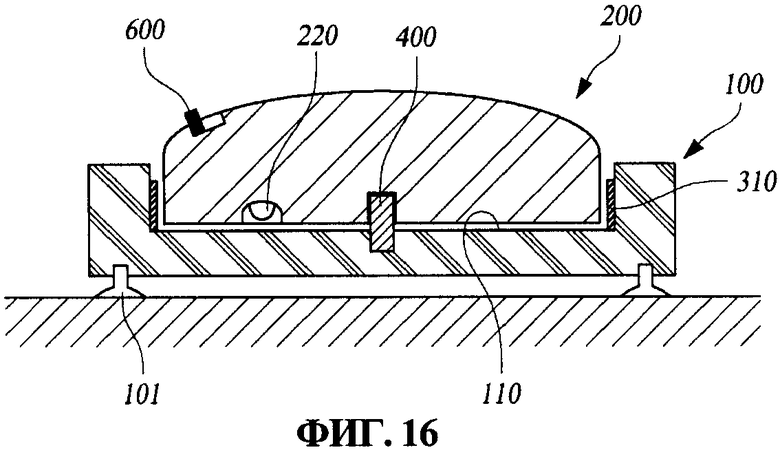
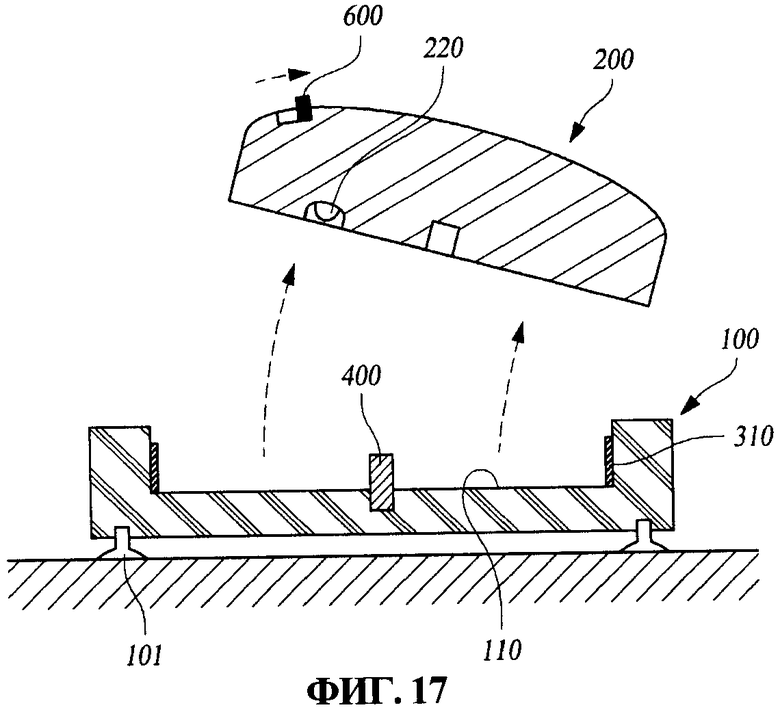
На фиг.16 и 17 представлены виды в поперечном разрезе, иллюстрирующие шестой вариант осуществления манипулятора-мыши, в соответствии с изобретением.
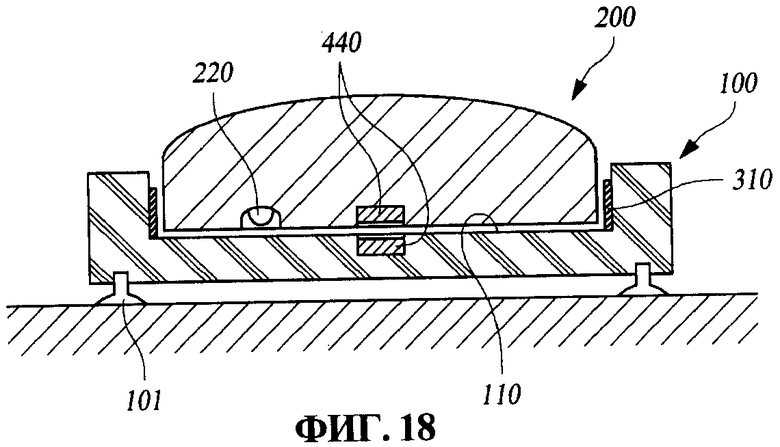
На фиг.18 представлен вид в поперечном разрезе, иллюстрирующий седьмой вариант осуществления манипулятора-мыши, в соответствии с изобретением.
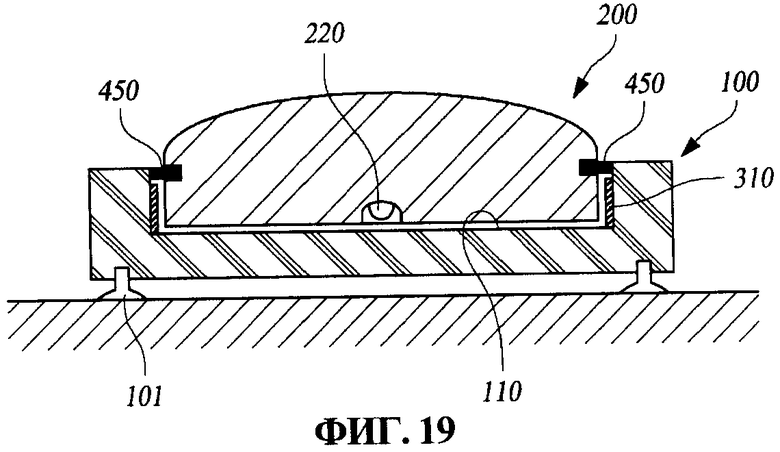
На фиг.19 представлен вид в поперечном разрезе, иллюстрирующий восьмой вариант осуществления манипулятора-мыши, в соответствии с изобретением.
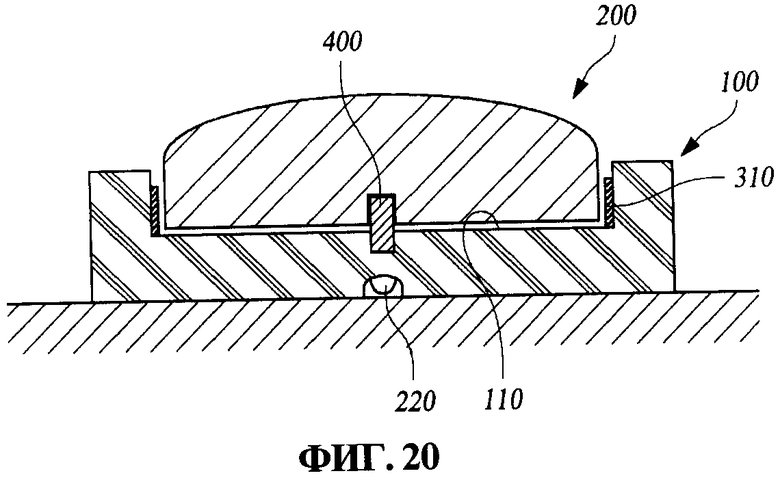
На фиг.20 представлен вид в поперечном разрезе, иллюстрирующий девятый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
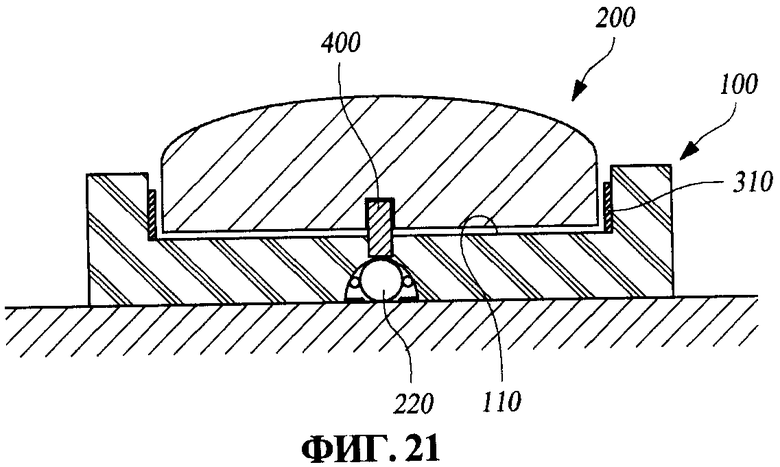
На фиг.21 представлен вид в поперечном разрезе, иллюстрирующий десятый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
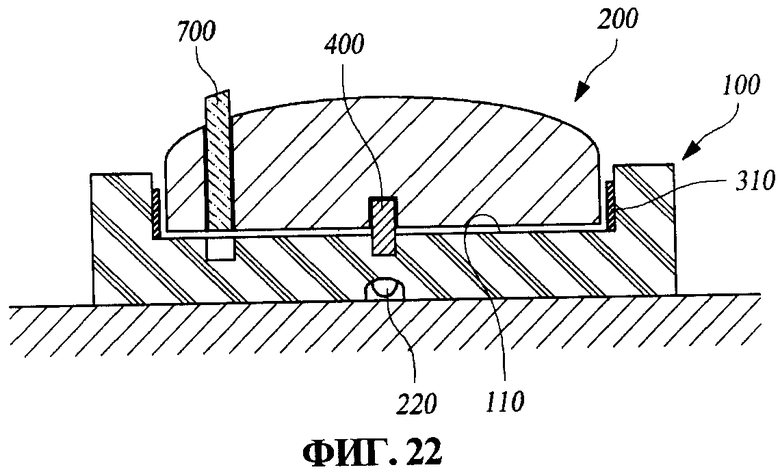
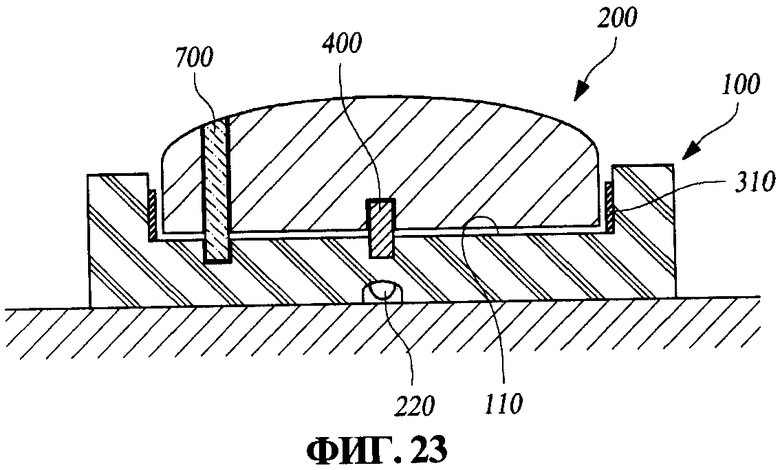
На фиг.22 и 23 представлены виды в поперечном разрезе, иллюстрирующие одиннадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
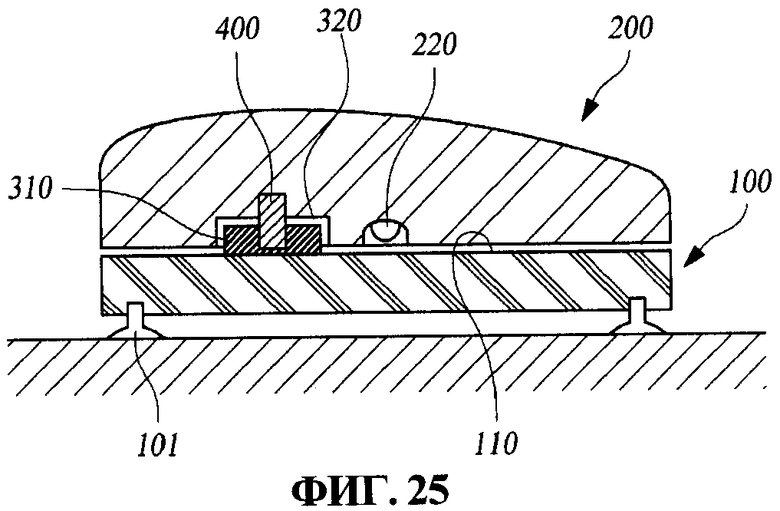
На фиг.24 и 25 представлен вид в перспективе, в разобранном состоянии, и вид в поперечном разрезе, иллюстрирующие двенадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
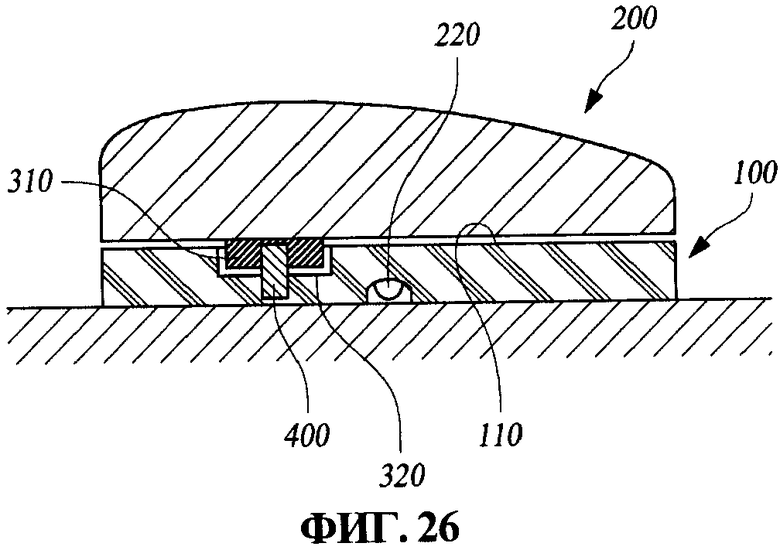
На фиг.26 представлен вид в поперечном разрезе, иллюстрирующий тринадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
На фиг.27 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий четырнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
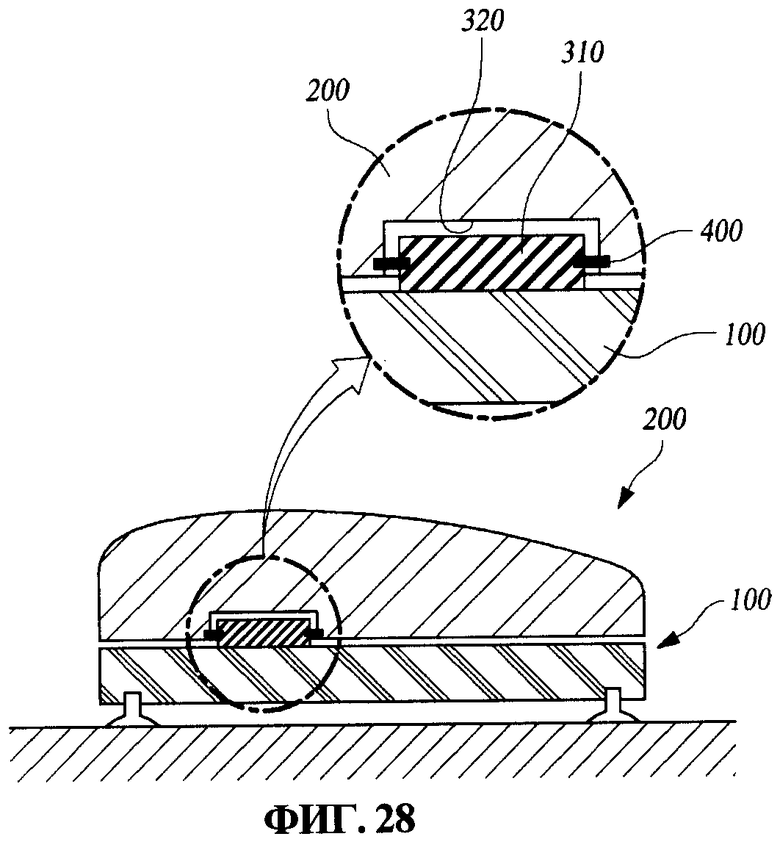
На фиг.28 представлен вид в поперечном разрезе, иллюстрирующий четырнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
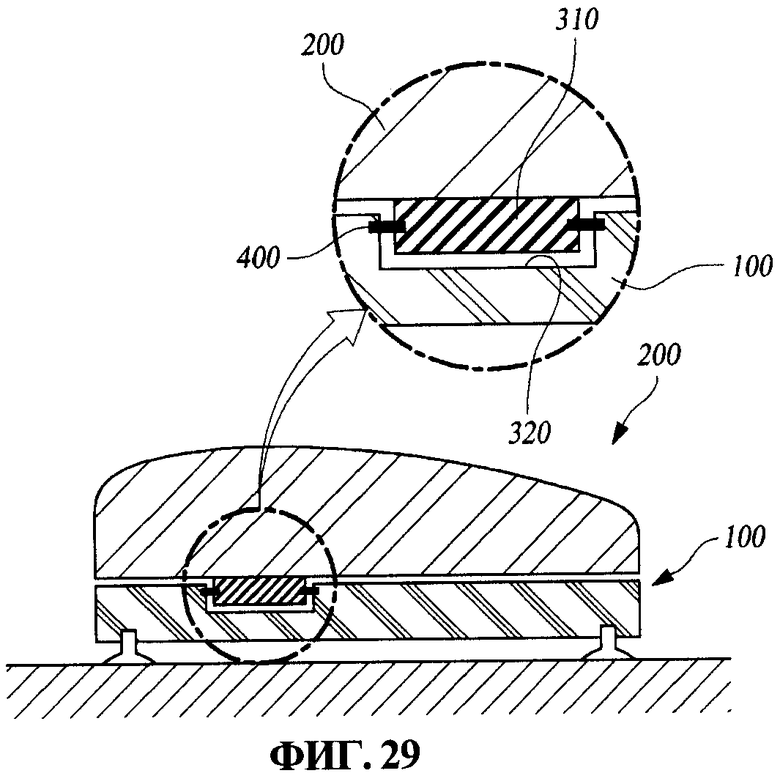
На фиг.29 представлен вид в поперечном разрезе, иллюстрирующий пятнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
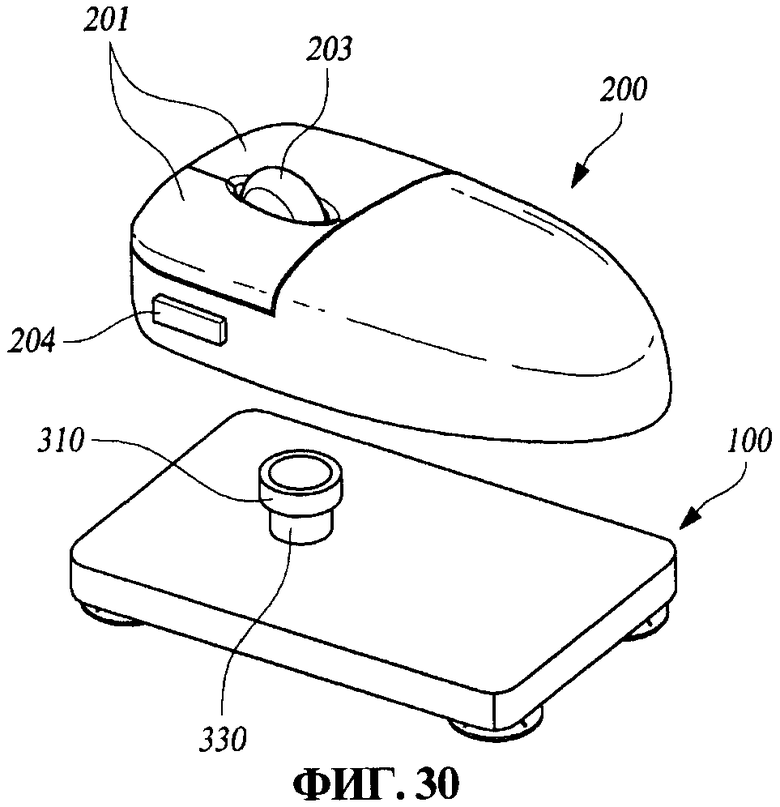
На фиг.30 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий шестнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
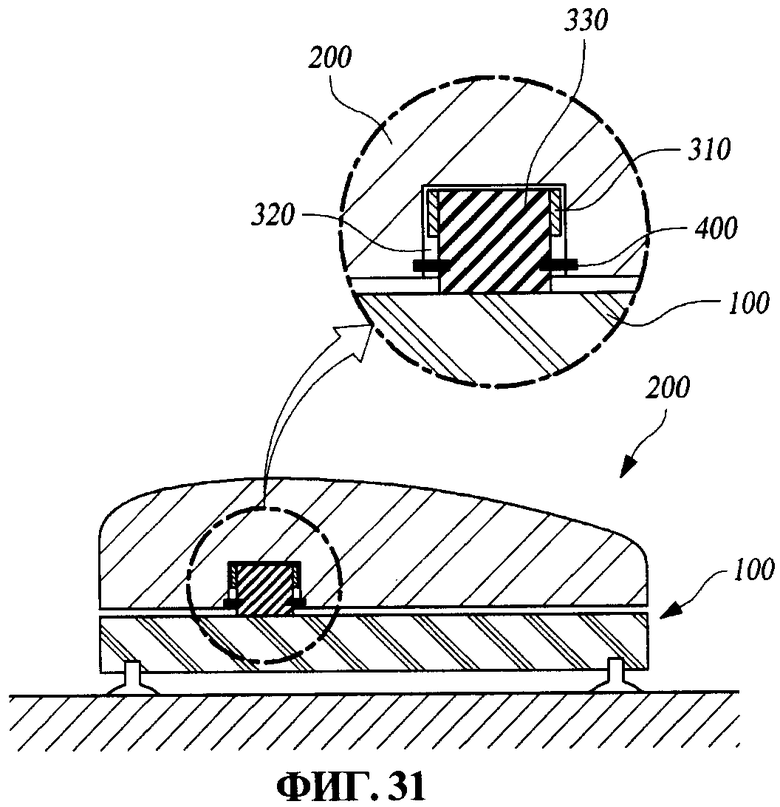
На фиг.31 представлен вид в поперечном разрезе, иллюстрирующий шестнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
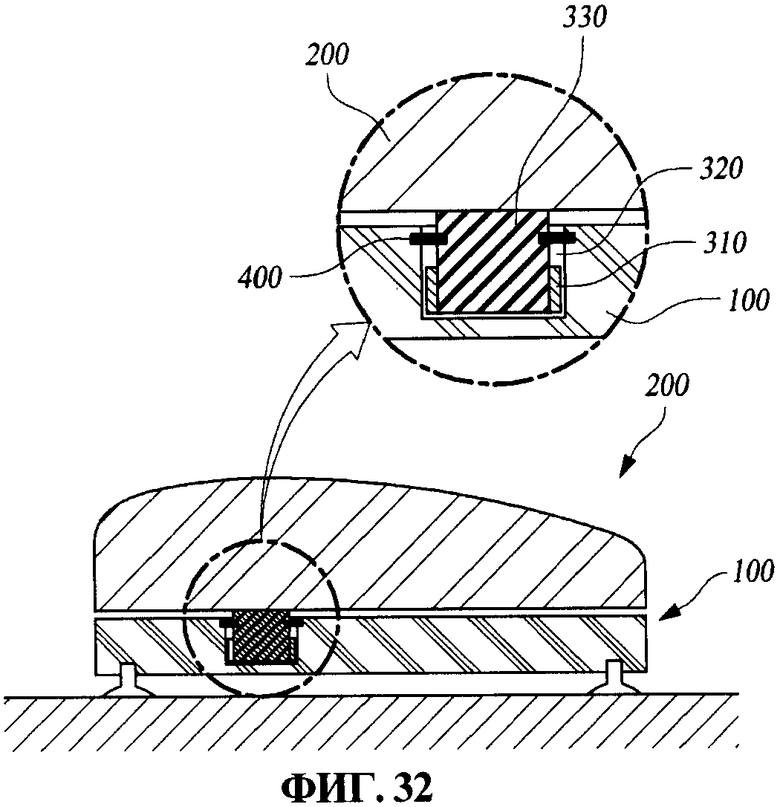
На фиг.32 представлен вид в поперечном разрезе, иллюстрирующий семнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
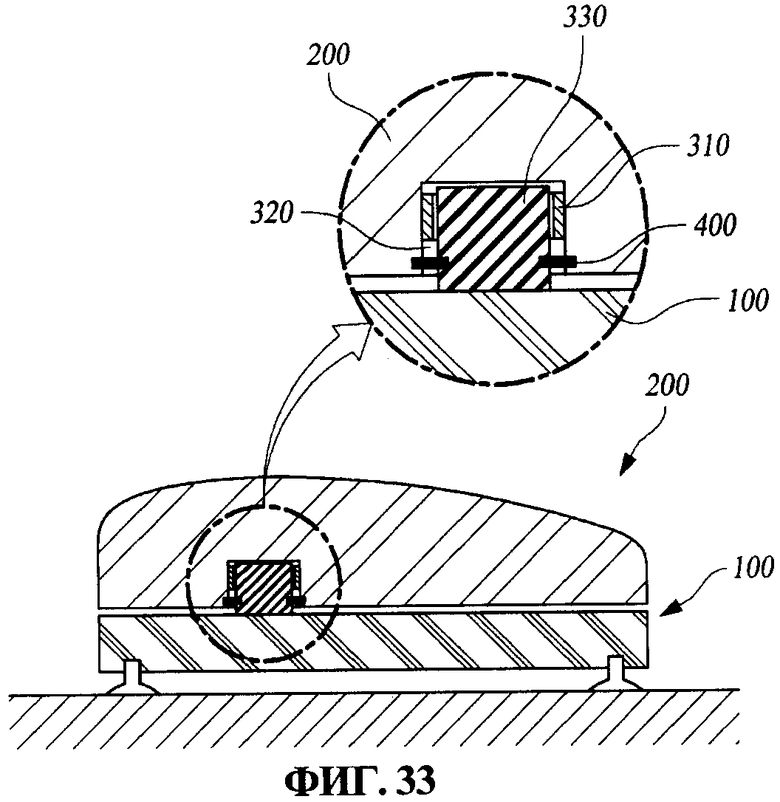
На фиг.33 представлен вид в поперечном разрезе, иллюстрирующий восемнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
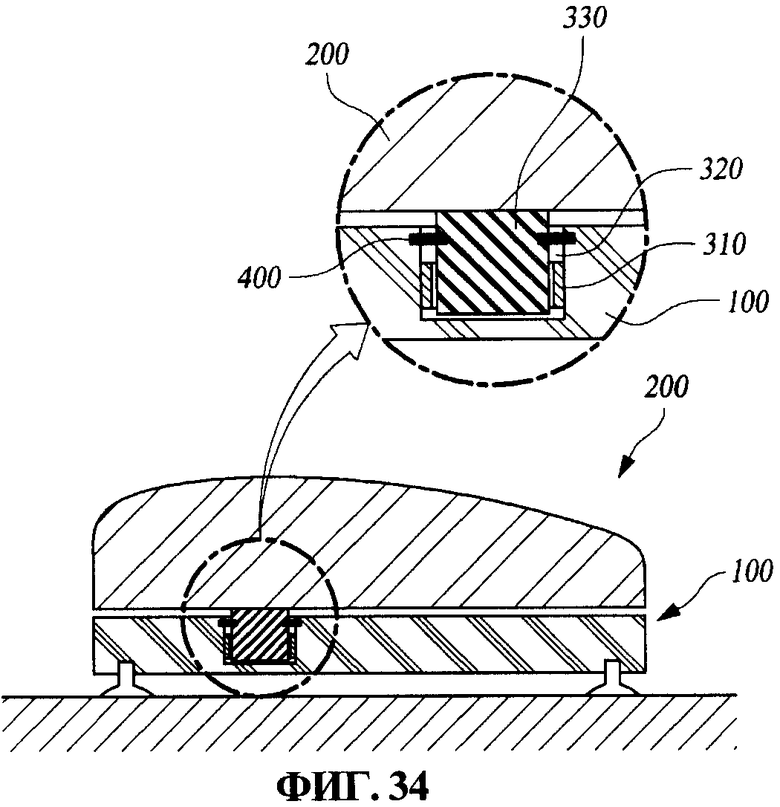
На фиг.34 представлен вид в поперечном разрезе, иллюстрирующий девятнадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
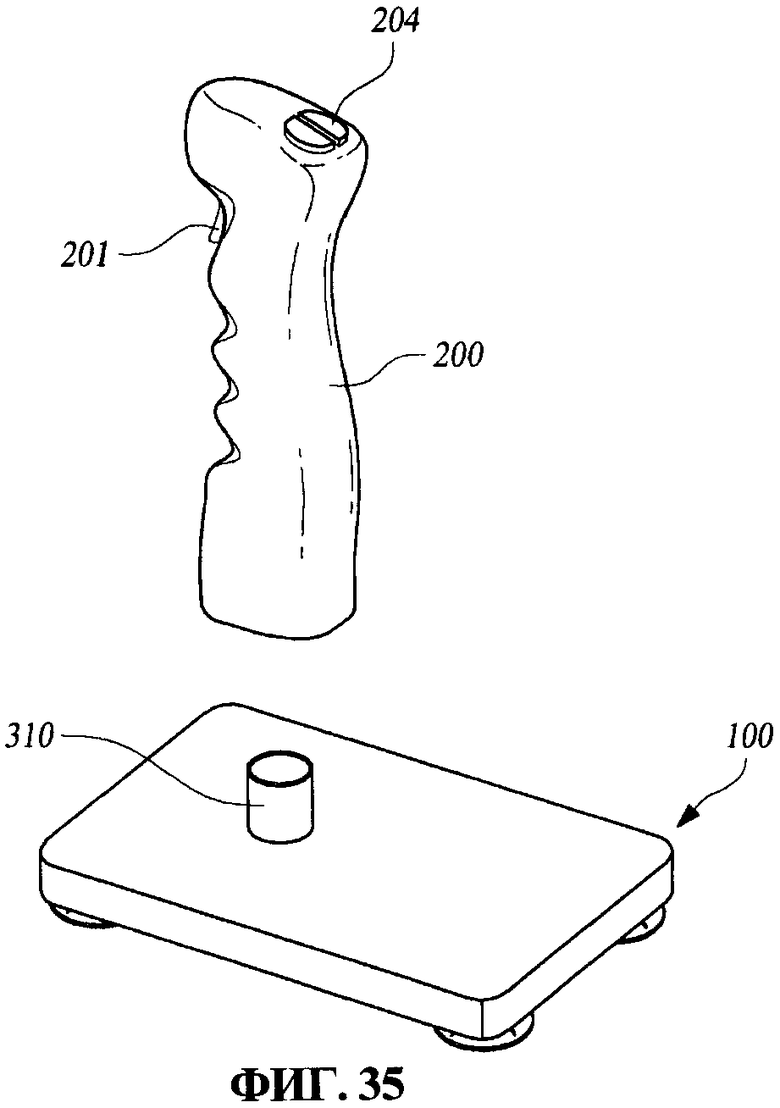
На фиг.35 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий двадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
На фиг.36 представлен вид в поперечном разрезе, иллюстрирующий двадцатый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
На фиг.37 представлен вид в поперечном разрезе, иллюстрирующий двадцать первый вариант осуществления манипулятора-мыши, в соответствии с изобретением.
Наилучшая реализация
Далее в настоящем документе устройство манипулятора-мыши в соответствии с изобретением будет описано более полно со ссылкой на сопровождающие чертежи, на которых изображены примеры ее осуществления.
На фиг.1 представлен вид в перспективе, иллюстрирующий в разобранном состоянии первый вариант осуществления мыши, в соответствии с изобретением, а на фиг.2 - вид в перспективе, иллюстрирующий в собранном состоянии первый вариант осуществления мыши, в соответствии с изобретением.
Как показано на фиг.1 и 2, мышь по данному изобретению в общем случае включает в себя корпус 100 и основную часть мыши 200, размещенную в корпусе 100.
Корпус 100 содержит приемный узел 110 в форме круга, который открыт сверху, с установленной в нем электронной платой (не показана). Электронная плата служит для передачи в компьютер управляющих сигналов, соответствующих перемещению основной части мыши 200, что будет описано далее.
Корпус 100 может также иметь провод (не показан), подсоединенный к внешней цепи, или иметь внутри смонтированный компонент для реализации беспроводной мыши в соответствии со способом подключения мыши к компьютеру по данному изобретению.
Провод может быть выполнен как последовательная линия, как кабель Персональной Системы/2 (PS/2) или как кабель Универсальной последовательной шины (USB). Последовательная линия подключена к последовательному порту, кабель PS/2 подключен к специальному выделенному участку, а кабель USB подключен параллельно к слоту расширения.
Для реализации беспроводной мыши в корпусе могут быть установлены инфракрасные (IR) коммуникационные компоненты, компоненты радиосвязи или модуль Bluetooth.
Корпус 100 может быть снабжен резиновыми элементами или резиновыми присосками 101, предотвращающими проскальзывание, прикрепленными к его нижней стороне. Резиновые присоски 101 служат для фиксирования корпуса 100 на гладкой поверхности с использованием для этого атмосферного давления.
В качестве альтернативы, к корпусу 100 может быть прикреплена опорная площадка (прокладка, подушечка) для запястья 102 так, чтобы зафиксировать корпус 100 весом запястья пользователя. Опорная площадка для запястья 102 стабильно поддерживает запястье пользователя и также стабильно фиксирует корпус 100 на поверхности его установки, тем самым сводя к минимуму перемещение корпуса 100. Конечно, на верхней части опорной площадки для запястья 102 может быть предусмотрен силиконовый или резиновый материал.
Основная часть мыши 200 выполнена в форме круглого тела, меньшего по размеру, чем приемный узел 110 корпуса 100, чтобы была возможность ее размещения в приемном узле 110. Основная часть мыши 200 снабжена клавишами (кнопками) ввода сигнала 201 и кнопкой прокрутки 203 на ее верхней поверхности, которые выступают над этой верхней поверхностью и находятся в положении, удобном для пользователя.
Кнопки ввода сигнала 201 поддерживают несколько функций. Например, пользователь может нажать на кнопку и отпустить ее на какой-либо особой точке (клик), переместить мышь при нажатой кнопке (перетаскивание) или нажать на кнопку дважды в быстрой последовательности (двойной клик). Кнопки ввода сигнала 201 могут также отобразить некоторые функциональные позиции, такие как «копировать», «вставить» и «отменить» на экране дисплея так, чтобы пользователь мог выбрать одну из них. Кнопка прокрутки 203 реализована как вращающаяся так, чтобы пользователь мог повернуть вверх или вниз колесико (ролик) кнопки прокрутки 203 пальцем, чтобы обусловить перемещение вверх или вниз отображенного текста или графического изображения на экране дисплея.
На боковой стороне основной части мыши 200 выполнены повторяющиеся выступы (не показаны) для корректного контакта со средством детектирования (с датчиком смещения) 310, что будет описано позже. Выступы (не показаны) имеют типичную форму зубчатого зацепления, в которой линия зубьев образует круговую форму.
На фиг.3 представлен вид сверху, иллюстрирующий первый вариант осуществления мыши, в соответствии с изобретением, а на фиг.4 - вид сверху, иллюстрирующий второй вариант осуществления мыши, в соответствии с изобретением.
Датчик 310 детектирует сдвиг основной части мыши 200, тем самым вызывая перемещение на экране дисплея указателя или курсора. Датчик 310 может быть выполнен в виде чувствительного элемента (сенсора) давления, прикрепленного к внутренней стенке приемного узла 110, или в виде коммутируемого (контактного) датчика давления, прикрепленного к внутренней стенке приемного узла 110, при этом каждый из коммутируемых датчиков давления размещен на определенном предварительно заданном расстоянии от соседнего с ним датчика.
Как показано на фиг.3, сенсор давления прикреплен вдоль внутренней стенки приемного узла 110. Сенсор давления имеет множество установленных в нем контактных точек для того, чтобы определить, что основная часть мыши 200 находится в (соответствующем, равном) контакте с каждой контактной точкой или что основная часть мыши 200 находится в контакте с контактной точкой, на которую нажимает, что, в свою очередь, приводит к перемещению указателя на экране дисплея компьютера.
Указатель перемещается на экране дисплея в ответ на сигнал детектируемого контакта, при этом скорость указателя соответствует определяемому давлению, которое добавляется после контакта.
Как показано на фиг.4, некоторое количество контактных датчиков давления смонтировано на внутренней стенке приемного узла 110. Контактные датчики давления представляют собой нажимные выключатели, на некоторые из которых нажимает основная часть мыши 200. Конкретнее, основная часть мыши 200, смещаясь в одном направлении внутри приемного узла 110, нажимает на некоторые нажимные выключатели, которые примыкают к основной части мыши 200. В результате указатель перемещается на экране дисплея компьютера на основании местоположения и количества нажимных выключателей, на которые нажала основная часть мыши 200.
Альтернативно, скорость перемещения указателя может быть обусловлена детектированным усилием, с которым основная часть мыши нажимает на нажимные выключатели.
В случаях когда сенсор давления или контактный датчик давления сам не может управлять скоростью указателя, могут использоваться иные схемы. Первая схема заключается в том, чтобы настроить сенсор давления или контактный датчик давления просто на индикацию направления перемещения указателя, в то время как управление скоростью указателя осуществляется через программное обеспечение. Во-вторых, к основной части мыши 200 может быть добавлен переключатель скорости 204 для управления скоростью указателя. Чтобы повысить удобство работы, переключатель скорости 204 может быть предпочтительно установлен на левой стороне основной части мыши 200, где обычно находится большой палец.
Сенсор давления или контактный датчик давления, которые создают сигнал в ответ на контакт, хорошо известны в технике, в связи с этим их внутреннее устройство и работа не будут подробно описаны.
На фиг.5 представлен вид сверху второго варианта осуществления мыши, в соответствии с изобретением, а на фиг.6 - фронтальный вид сбоку третьего варианта осуществления мыши в соответствии с изобретением.
Выше описано, что указатель компьютера перемещается с помощью датчика 310. Когда основная часть мыши 200 перемещается внутри приемного узла 110 корпуса 100, это приводит к перемещению указателя. Основная часть мыши 200, находящаяся внутри приемного узла 110, может сохранять контакт с датчиком 310, тем самым вызывая перемещение указателя вопреки намерению пользователя. Чтобы предотвратить получение такого результата, между корпусом 100 и основной частью мыши 200 установлено упругое средство 400, возвращающее, таким образом, основную часть мыши 200 в исходное положение, в соответствии с чем основная часть мыши 200 выходит из контакта с датчиком 310.
Как показано на фиг.5, упругое средство 400 по второму варианту осуществления включает рабочую часть 410, несколько прижимных элементов 420 и пружины 430. Рабочая часть 410 выполнена с круглым нижним участком 411, который вставлен в полое пространство (не показано) в дне приемного узла, чтобы горизонтально перемещаться в этом полом пространстве, и верхним участком 412, который выступает относительно приемного узла 110 и соединен с основной частью мыши 200. Прижимные элементы 420 соединены с нижним участком 411 рабочей части 410, окружая последнюю. Пружины 430 упруго поджимают прижимные элементы 420 к рабочей части 410.
Прижимные элементы 420 имеют поверхность дугообразной формы, которая стабильно находится в тесном контакте с нижним участком 411 рабочей части 410. Четыре из прижимных элементов 420 расположены с промежутками 90° вокруг нижнего участка 411 рабочей части 410.
Количество прижимных элементов 420 не ограничено четырьмя элементами, расположенными через 90°, их может быть больше или меньше в соответствии с необходимостью.
Каждая из пружин 430 предусмотрена на соответствующем одном из прижимных элементов 420, которые расположены через 90°. Пружины 430 создают одинаковое упругое усилие в направлении растяжения таким образом, что рабочая часть 410 всегда расположена в центре приемного узла 110, тем самым препятствуя контакту основной части мыши 200 сдатчиком 310.
Прижимные элементы 420 могут быть выполнены в виде переключателей таким образом, чтобы при изменении направления компьютерной прокрутки можно было управлять соответствующей интенсивностью нажатия на прижимные элементы 420.
Как показано на фиг.6, упругое средство 400 в третьем варианте осуществления выполнено в виде упругой планки (стержня). Упругая планка прикреплена своей нижней частью к центру приемного узла 110, а своей верхней частью - к нижней поверхности основной части мыши 200, чтобы обеспечить приложение усилия ее возврата в исходное вертикальное положение.
Упругая планка выполнена из листовой пружины или синтетического пластика, создающего усилие возврата в исходное положение.
Соответствующим образом, мышь по данному изобретению выполнена с основной частью 200, размещенной в приемном узле 110 корпуса 100, при этом к внутренней стенке приемного узла 110 прикреплен датчик 310, а упругое средство 400 расположено между корпусом 100 и основной частью мыши 200.
До сих пор была выше описана конструкция данного изобретения, теперь его работа будет описана более полно со ссылкой на фиг.1-6.
Во-первых, когда пользователь сдвигает основную часть мыши 200 в желаемом направлении внутри приемного узла 110 корпуса 100, удерживая рукой основную часть мыши 200, эта сдвинутая часть 200 контактирует с датчиком 310 на внутренней стенке приемного узла 110, тем самым создавая координатные сигналы. Указатель на экране дисплея реагирует на создаваемые координатные сигналы и перемещается вслед за перемещением основной части мыши 200. После перемещения указателя управлением кнопкой ввода сигналов 201 и/или кнопкой прокрутки 203 вводится управляющий сигнал, подключающий ту или иную операцию, которая является желательной для пользователя.
Когда пользователь отпускает основную часть мыши 200, она перемещается к центру приемного узла 110 с помощью упругого средства 400. Основная часть мыши 200 возвращается в положение «ожидания», в котором она больше не контактирует с датчиком 310.
На фиг.7 представлен вид в перспективе, иллюстрирующий применение, в соответствии с которым мышь по данному изобретению прикреплена к клавиатуре, а на фиг.8 представлен вид в перспективе, иллюстрирующий еще одно применение, в соответствии с которым мышь по данному изобретению подсоединена к компьютеру типа «ноутбук».
Как показано на фиг.7, мышь в соответствии с тем, как описано выше, можно использовать при ее подсоединении к одной части клавиатуры В, используя при этом преимущество уменьшенного пространства. В случае проводной мыши провода могут быть подключены к внутренней части клавиатуры, тем самым устраняется проблема беспорядочно лежащих проводов.
Конечно, мышь может использоваться и будучи отделенной от клавиатуры В, чтобы создавать удобства для пользователя.
Как показано на фиг.8, мышь по данному изобретению может быть установлена на среднем участке компьютера типа «ноутбук» С, на котором в общем случае размещают манипулятор в виде сенсорной панели. Альтернативно, мышь может быть связана разъемным соединением с боковой стороной компьютера типа «ноутбук» С.
На фиг.9 представлен вид в перспективе, иллюстрирующий альтернативную форму корпуса мыши, в соответствии с изобретением.
Как показано на фиг.9, мышь по данному изобретению включает корпус 100 в форме бруска, протяженного в продольном направлении, и основную часть мыши 200, установленную на корпусе 100 таким образом, что пользователь может управлять основной частью мыши 200 с помощью указательного пальца. В частности, пользователь управляет основной частью мыши 200, перемещая ее указательным пальцем, удерживая при этом корпус 100 в форме бруска, что вызывает перемещение указателя компьютера.
Основная часть мыши 200 при этом выполнена с выемкой под палец 205, куда пользователь может поместить свой указательный палец, чтобы управление основной частью мыши 200 происходило более стабильно.
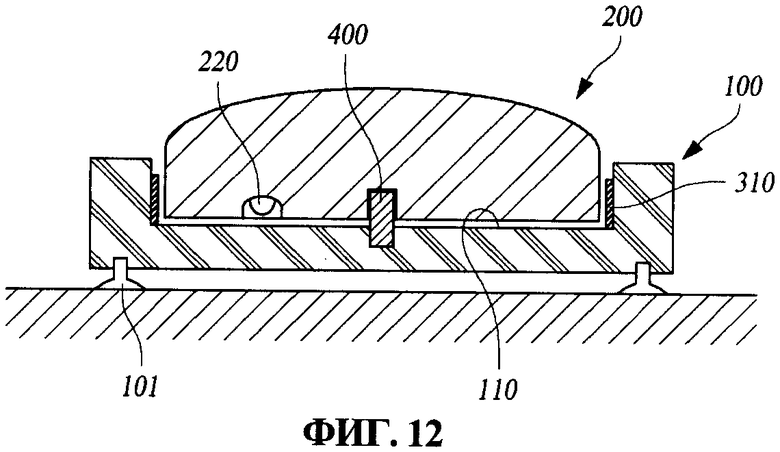
На фиг.10 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий четвертый вариант осуществления мыши, в соответствии с изобретением. На фиг.11 представлен вид снизу в перспективе, иллюстрирующий основную часть мыши по четвертому варианту осуществления, в соответствии с изобретением, а на фиг.12 - вид в поперечном разрезе, иллюстрирующий четвертый вариант осуществления мыши, в соответствии с изобретением.
Как видно на фиг.10-12, мышь по данному изобретению включает в себя корпус 100 с приемным узлом 110, основную часть мыши 200, размещенную внутри приемного узла 100 с возможностью отделения от нее, и датчик давления 310, расположенный на внутренней стенке приемного узла 110. Когда основная часть мыши 200 контактирует с приемным узлом 110, датчик 310 определяет сдвиг основной части мыши 200, что создает сигнал на перемещение указателя. Мышь содержит также средство возврата в исходное положение 400, которое прикреплено к дну приемного узла 110 и вставлено своим верхним участком в основную часть мыши 200.
Корпус 100 снабжен резиновыми присосками 101, прикрепленными к его нижней стороне, чтобы зафиксировать корпус 100 на расположенной под ним опорной поверхности. Приемный узел 110 выполнен в форме округлой выемки.
Как показано на фиг.10, корпус 100 выполнен с приемным узлом 110, расположенным в его центре. В виде альтернативы, один участок корпуса 100 может быть удлинен таким образом, чтобы обеспечить опору для запястья или руки пользователя от кисти до локтя, которые будут находиться на удлиненном участке корпуса 100. Когда корпус 100 сконфигурирован для поддержки запястья или руки пользователя, расположенной на нем, корпус 100 может быть более надежным образом зафиксирован на опорной поверхности.
Основная часть мыши 200 выполнена так, чтобы быть меньшего размера, чем приемный узел 110, в большей или меньшей степени, для обеспечения люфта в любом горизонтальном направлении внутри приемного узла 110. Как показано на фиг.12, когда основная часть мыши 200 занимает положение в центре приемного узла 110, она не контактирует ни с какими элементами датчика давления 310.
Когда основная часть мыши 200 перемещается в одном направлении от положения, изображенного на фиг.12, чтобы прийти в контакт с датчиком давления 310, датчик давления 310 детектирует сдвиг основной части мыши 200, что, в свою очередь, вызывает перемещение указателя на экране дисплея. Датчик давления 310 вызывает перемещение указателя на экране дисплея в ответ на сигнал о детектированном контакте и управляет скоростью указателя путем отражения детектированной величины давления, добавляемого после контакта.
Здесь датчик давления 310 может быть сконструирован так, чтобы увеличивать или уменьшать скорость указателя в соответствии с контактным давлением, оказываемым основной частью мыши 200 на датчик 310. Значит, датчик давления 310 может управлять скоростью указателя путем отражения детектированной величины давления, которая добавляется после контакта с основной частью мыши 200. Соответственно, указатель перемещается быстро, когда пользователь с силой нажимает на основную часть мыши 200, и медленно, когда пользователь не прикладывает большого усилия к основной части мыши 200.
Когда пользователь приводит основную часть мыши 200 в контакт с датчиком 310, прижимая ее в одном направлении, основная часть мыши 200 продолжает оставаться в контакте с датчиком давления 310, даже если пользователь снимает руку с основной части мыши 200, при этом указатель может продолжать перемещение.
Средство возврата в прежнее положение 400 представляет собой компонент, предназначенный для устранения этой проблемы, и выполнено оно в виде цилиндрического упругого тела. Средство возврата в прежнее положение 400 жестко прикреплено своим нижним концом к центру дна приемного узла 110 и вставлено своим верхним концом в отверстие для вставки 210 в центре нижней стороны основной части мыши 200. Соответственно, когда внешнее усилие не приложено к основной части мыши 200, средство возврата в прежнее положение 400 возвращает основную часть мыши 200 в исходное положение, в соответствии с которым отсутствует ее контакт с датчиком давления 310.
Изобретение характеризуется тем, что основную часть мыши 200 можно использовать в качестве традиционной перемещаемой мыши, отделив ее от корпуса 100.
Как показано на фиг.11, основная часть мыши 200 оснащена в своей нижней (донной) части датчиком перемещения 220. Кода основную часть мыши 200 отделяют от корпуса 100, датчик перемещения 220 служит для детектирования смещения основной части мыши 200, чтобы создать сигнал на перемещение указателя таким образом, что основная часть мыши 200 может использоваться как традиционная перемещаемая мышь, отделенная от корпуса 100.
Соответственно, пользователь может подходящим образом использовать мышь по данному изобретению согласно соответствующим окружающим условиям. То есть пользователь может использовать мышь, управляя основной частью мыши 200, установленной в корпусе 100. Также пользователь может использовать мышь по данному изобретению, управляя основной частью мыши 200, извлеченной из корпуса 100.
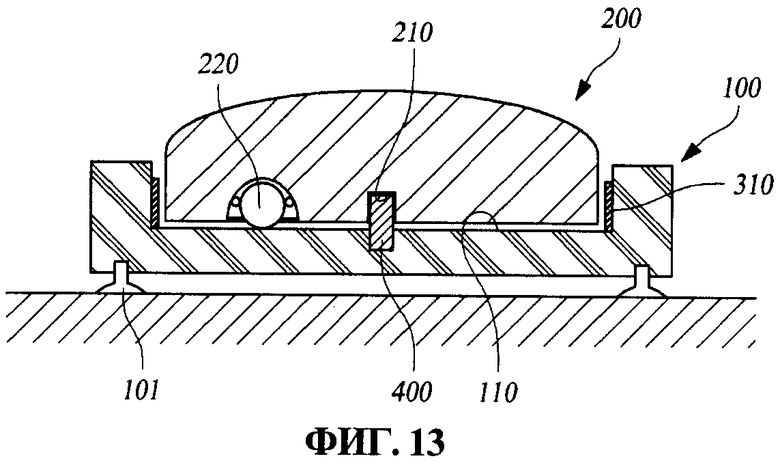
На фиг.13 представлен вид в поперечном разрезе, иллюстрирующий пятый вариант осуществления мыши, в соответствии с данным изобретением.
Датчик перемещения 220 основной части мыши 200 может быть выполнен в виде оптического датчика (сенсора), который используется в стандартной оптической мыши, как показано на фиг.11 и 12. Альтернативно, как показано на фиг.13, датчик перемещения 220 основной части мыши 200 может быть выполнен в виде шарика, роликов и кодового (аналого-цифрового) датчика положения, которые используются в традиционной шариковой мыши. Конструкция основной части мыши, в которой происходит вращение роликов вслед за вращением шарика и при этом кодовый (аналого-цифровой) датчик положения создает сигнал на перемещение указателя, по существу, такая же, как и конструкция традиционной шариковой мыши, создающей сигнал на перемещение указателя, в связи с чем не приводится ее подробное описание.
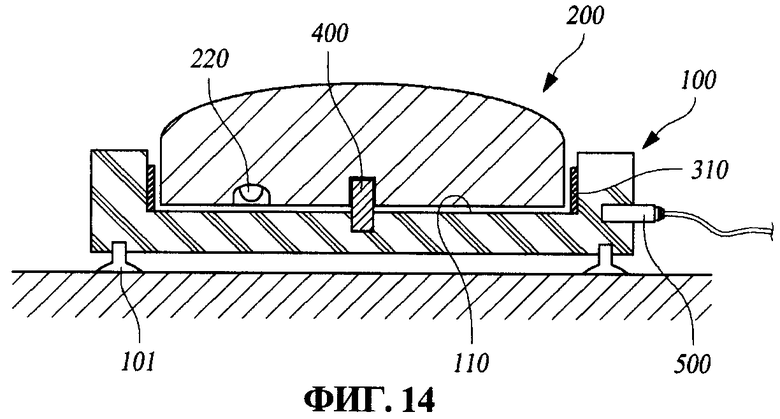
На фиг.14 и 15 представлены виды в поперечном разрезе, иллюстрирующие узел подключения сигнального кабеля 500 в четвертом варианте осуществления мыши, согласно изобретению.
В случае если мышь по данному изобретению используется как проводная мышь, сигнальный кабель 500 используется для передачи в компьютер созданных сигналов на перемещение указателя.
Когда основная часть мыши 200 установлена в корпусе 100, в частности, для использования его в качестве собственно манипулятора-мыши, сигнальный кабель 500 подсоединен к корпусу 100 для передачи сигнала на перемещение указателя от датчика давления 310 в компьютер. Когда основная часть мыши 200 отделена от корпуса 100, в частности, для использования в качестве перемещаемой мыши, сигнальный кабель 500 подсоединен к основной части мыши 200 таким образом, чтобы передавать сигнал на перемещение указателя от датчика перемещения 220 в компьютер.
В случае если сигнальный кабель 500 подсоединен к корпусу 100, как показано на фиг.14, в компьютер передается сигнал на перемещение указателя от датчика давления 310. В случае если сигнальный кабель 500 подсоединен к основной части мыши 200, как показано на фиг.15, в компьютер передается сигнал на перемещение указателя от датчика перемещения 220. Соответственно, не происходит одновременной передачи сигнала на перемещение указателя и от датчика давления 310, и от датчика перемещения 220.
Сигнальный кабель 500 может также быть постоянно подсоединен к основной части мыши 200 или к корпусу 100. В этом случае сигнальный кабель 500 передает сигнал на перемещение указателя от датчика давления 310, когда основная часть мыши 200 установлена в корпусе 100, но передает сигнал на перемещение указателя от датчика перемещения 220, когда основная часть мыши 200 отделена от корпуса 100. В этом случае нет необходимости в изменении положения подсоединения сигнального кабеля 500, что, таким образом, повышает удобство использования сигнального кабеля 500.
На фиг.16 и 17 представлены виды в поперечном разрезе, иллюстрирующие шестой вариант осуществления мыши, в соответствии с данным изобретением.
Мышь по данному изобретению может быть выполнена в виде беспроводной мыши. В этом случае датчик давления 310 и датчик перемещения 220 сконструированы таким образом, чтобы передавать сигнал на перемещение указателя посредством радиоволн, при этом основная часть мыши снабжена переключателем режима работы 600 для включения/выключения работы датчика перемещения 220.
В состоянии, изображенном на фиг.16, переключатель режима 600 переведен в положение отключения датчика перемещения 220 таким образом, что в компьютер передается только сигнал на перемещение указателя от датчика давления 310. И, наоборот, в состоянии, изображенном на фиг.17, переключатель режима 600 переведен в положение включения датчика перемещения 220, при этом основная часть мыши 220 отделена от корпуса 100 таким образом, что в компьютер передается сигнал на перемещение указателя, поступающий только от датчика перемещения 220.
На фиг.18 представлен вид в поперечном разрезе, иллюстрирующий седьмой вариант осуществления мыши, в соответствии с изобретением.
Средство возврата в исходное положение 400 для возврата основной части мыши 200 в центр приемного узла 110 может быть выполнено с использованием магнитной силы в дополнение к конструкции, которая обеспечивает возврат основной части мыши 200 за счет ее собственных упругих сил, восстанавливающих исходное положение, как показано на фиг.1-17.
То есть средство возврата в прежнее положение 400 может быть выполнено с использованием пары магнитных элементов 440, один из которых смонтирован на дне приемного узла 110, а другой магнитный элемент 440 монтируется на нижней поверхности основной части мыши 200. Магнитные элементы 440 установлены напротив друг друга, чтобы создавать усилие притяжения. Когда основная часть мыши 200 перемещается в одном направлении, ориентирование магнитных элементов 440 смещается в одном направлении (т.е. вертикальные оси магнитных элементов 440 смещаются). Если снять внешние усилия с основной части мыши 200, то магнитные элементы 440 вернутся в исходное положение благодаря силам притяжения, создаваемым магнитными элементами 440, которые стремятся к восстановлению своего отцентрированного вертикального положения (т.е. магнитные элементы 440 стремятся восстановить свое исходное положение, в котором они установлены вдоль одной вертикальной оси). В результате основная часть мыши 200 тоже возвращается в положение, показанное на фиг.18.
В случае выполнения средств возврата в прежнее положение 400 в виде упругого элемента этот упругий элемент может быть деформирован или поврежден при использовании с достаточной интенсивностью, при этом основная часть мыши 200 не может соответствующим образом вернуться в свое исходное положение. Средство возврата в прежнее положение 400, выполненное в виде пары магнитных элементов 440, может создать преимущество в отношении повышенного рабочего ресурса в связи с тем, что такие компоненты редко подвергаются деформациям или повреждениям при использовании.
На фиг.19 представлен вид в поперечном разрезе, иллюстрирующий восьмой вариант осуществления мыши, в соответствии с изобретением.
Средство возврата в прежнее положение 400 может быть выполнено в виде упругих элементов 450, выступающих от внутренней стенки приемного узла 110 в направлении к основной части мыши 200. То есть основная часть мыши 200, перемещающаяся в одном направлении, сжимает, по меньшей мере, один из упругих элементов 450 в соответствующем направлении таким образом, что сила упругости упругого элемента 450 может возвратить основную часть мыши 200 в исходное положение после снятия внешнего усилия.
При этом основная часть мыши 200, предпочтительно, может быть выполнена с выемками на ее наружной периферийной поверхности, в каждую из которых входит соответствующий один из упругих элементов 450, чтобы улучшить тесный контакт упругих элементов 450 с основной частью мыши 200.
Далее, упругие элементы 450 могут, предпочтительно, быть предусмотрены по всей внутренней периферийной поверхности приемного узла 110 таким образом, чтобы прикладывать упругое усилие на основную часть мыши 200 независимо от направления ее перемещения. В силу этого упругие элементы 450, размещенные вдоль всей внутренней периферийной поверхности приемного узла 110, могут, преимущественно, препятствовать попаданию инородных материалов, таких как пыль или грязь, в промежуток между основной частью мыши 200 и корпусом 100.
На фиг.20 представлен вид в поперечном разрезе, иллюстрирующий девятый вариант осуществления мыши, в соответствии с изобретением, а на фиг.21 - вид в поперечном разрезе, иллюстрирующий десятый вариант осуществления мыши, в соответствии с изобретением.
Мышь по данному изобретению может быть выполнена в виде перемещаемой мыши, в которой основная часть мыши 200 отделена от корпуса 100, или может быть сконструирована таким образом, что корпус 100 с установленной в нем основной частью мыши 200 может использоваться в качестве манипулятора-мыши.
Таким образом, мышь по этому варианту осуществления включает корпус 100 с выполненным в нем приемным узлом 110, основную часть мыши 200, установленную в приемном узле 110 с возможностью отделения от него, и датчик 310, размещенный на внутренней стенке приемного узла 110. Датчик 310 служит для детектирования сдвига основной части мыши 200, когда она контактирует с датчиком 310, при этом создается сигнал на перемещение указателя. На нижнем участке основной части мыши 200 может быть также предусмотрен датчик перемещения для детектирования сдвига корпуса 100, чтобы вызвать перемещение указателя. Аналогично вышеприведенному описанию со ссылкой на фиг.12 и 13 датчик перемещения 220 может быть выполнен в виде оптического датчика (см. фиг.20), или в его конструкцию могут входить шарик, ролики и кодовый датчик положения (см. фиг.21).
Варианты осуществления, показанные на фиг.20 и 21, характеризуются такой конструкцией, которая обеспечивает создание сигнала на перемещение указателя при детектировании сдвига корпуса 100, и, таким образом, в них не используются резиновые присоски 101 для фиксации корпуса 100.
Когда пользователь перемещает как основную часть мыши 200, так и корпус 100, удерживая основную часть мыши 200, датчик перемещения 220 на дне корпуса 100 детектирует направление сдвига и скорость корпуса 100 для создания соответствующего сигнала на перемещение указателя.
Таким образом, мыши по данному изобретению, изображенные на фиг.20 и 21, могут работать как мышь, в которой корпус 100 зафиксирован, а подвижной является только основная часть мыши 200, или работать как обычная мышь, в которой может перемещаться комплект, состоящий из основной части мыши 200 и корпуса 100. В соответствии с описанной выше конструкцией мыши согласно данному изобретению в случае, когда мышь по данному изобретению должна быть трансформирована в перемещаемую мышь, основная часть мыши 200 не должна быть отделена от корпуса 100, и, таким образом, режим работы мыши можно легко трансформировать.
На фиг.22 и 23 представлены виды в поперечном разрезе, иллюстрирующие одиннадцатый вариант осуществления мыши, в соответствии с изобретением.
В соответствии с вариантами осуществления, изображенными на фиг.20 и 21, наружная поверхность основной части мыши 200 расположена на расстоянии от внутренней стенки приемного узла 110. Когда пользователь пытается переместить и основную часть мыши 200, и корпус 100, удерживая рукой основную часть мыши 200, основная часть мыши 200 и корпус 100 могут не перемещаться как единая деталь и, таким образом, управление мышью по данному изобретению может оказаться неудобным.
Соответственно, как показано на фиг.22 и 23, мышь согласно изобретению дополнительно включает блокировочное средство 700 для фиксации основной части мыши 200 относительно корпуса 100.
Блокировочное средство 700 присоединено к основной части мыши 200 с возможностью скольжения, при этом его конструкция такова, что его дальний конец (т.е. нижний конец в этом варианте осуществления) проходит в корпус 100 таким образом, чтобы полностью зафиксировать основную часть мыши 200 на корпусе 100 при однократном нажатии на блокировочное средство 700, но выходит из корпуса 100, чтобы разблокировать основную часть мыши 200 и корпус 100, при двукратном нажатии на блокировочное средство 700. При использовании мыши по данному изобретению блокировочное средство 700 разблокировано, как показано на фиг.22, таким образом, основная часть мыши 200 может независимым образом выдвигаться из корпуса 100. Когда мышь по данному изобретению используется в качестве перемещаемой мыши, блокировочное средство 700 фиксирует основную часть мыши 200 на корпусе 100, при этом основная часть мыши 200 и корпус 100 перемещаются как единое целое.
В то время как блокировочное средство 700 по данному варианту осуществления описано как устройство «ударного» воздействия, которое автоматически вставляется и извлекается в ответ на повторный нажим, это не подразумевает ограничения объема изобретения. Пожалуй, блокировочное средство 700 может быть выполнено в виде любых конструкций, которые могут зафиксировать основную часть мыши 200 на корпусе 100. Поскольку этот тип блокировочного устройства широко используется в различных формах, его подробное описание не приводится.
Мышь в соответствии с изобретением может иметь такую конструкцию, которая позволяет выбрать для создания сигнала на перемещение указателя либо датчик перемещения 220, либо датчик давления 310 в соответствии с тем, происходит ли фиксация основной части мыши 200 на корпусе 100 с помощью блокировочного средства 700 или происходит разблокировка основной части мыши 200 и корпуса 100.
Когда блокировочное средство 700 фиксирует основную часть мыши 200 на корпусе 100, активируется датчик перемещения 220, а датчик давления 310 при этом остается в неактивированном состоянии. Таким образом, указатель перемещается в ответ на сигнал на перемещение указателя, поступивший от датчика перемещения 220. И, наоборот, при разблокировке основной части мыши 200 относительно корпуса 100 при помощи блокировочного средства 700 активируется датчик давления, а датчик перемещения остается в неактивированном состоянии, при этом указатель перемещается в ответ на сигнал на перемещение указателя, поступивший от датчика давления 310.
На фиг.24 и 25 представлен вид в перспективе, в разобранном состоянии, и вид в поперечном разрезе, иллюстрирующие двенадцатый вариант осуществления мыши в соответствии с настоящим изобретением.
Манипуляторы-мыши по данному изобретению, как показано на фиг.1-23, выполнены круглой формы, при этом основная часть мыши 200 и приемный узел 110 являются симметричными во всех направлениях, таким образом, к датчику давления 310 может быть приложено одинаковое давление независимо от направления перемещения основной части мыши 200. Однако в некоторых случаях круглая форма основной части мыши 200 может оказаться неудобной для пользователя, когда он держит мышь в руке.
Чтобы этого не возникло, как показано на фиг.24, основная часть мыши 200 выполнена заранее заданной формы (а именно, обтекаемой формы, как традиционная мышь) так, чтобы пользователь мог легко держать рукой основную часть мыши 200. Датчик давления 310 выполнен цилиндрической формы, а внизу основной части мыши 200 выполнена цилиндрическая выемка 320 с диаметром, немного большим наружного диаметра датчика давления 310, таким образом, датчик давления 310 можно вставить в основную часть мыши 200, в частности в выполненную в ней выемку 320. Средство возврата с прежнее положение 400 неподвижно закреплено своим верхним концом в самом глубоком внутреннем конце выемки 320 (а именно, в верхнем конце выемки 320 на фиг.25) и вставлено своим нижним концом в датчик давления 310 таким образом, что наружная боковая поверхность датчика давления 310 расположена на расстоянии от внутренней стенки выемки 320. Когда основная часть мыши 200 смонтирована на верхней поверхности корпуса 100, нижний конец средства возврата 400 вставлен в датчик давления 310 таким образом, чтобы датчик давления 310 находился в центре выемки 320, пока не будет приложено внешнее усилие.
После того как датчик давления 310 цилиндрической формы вставлен в основную часть мыши, контактное давление может быть равномерно приложено к основной части мыши независимо от направления ее перемещения, даже если она не имеет круглую наружную форму. Соответственно, движение указателя может быть реализовано одинаково в соответствующих направлениях. Таким образом, наружная форма основной части мыши 200 может быть спроектирована разнообразным образом для удовлетворения вкусов потребителей.
В нижнем участке основной части мыши 200 предусмотрен датчик перемещения 220, и, когда основная часть мыши 200 отделяется от корпуса 100, он обнаруживает перемещение основной части мыши 200, чтобы создать сигнал на перемещение указателя.
Средство возврата в прежнее положение 400 не ограничено выполнением в виде упругого элемента в форме бруска, как показано на фиг.25, оно может быть выполнено также в виде пары магнитных элементов 440 или упругих элементов 450, которые были описаны выше со ссылками на фиг.18 и 19.
В частности, средство для возврата в прежнее положение 400 может быть выполнено в виде пары магнитных элементов (не показаны) для создания усилия притяжения, при этом один магнитный элемент расположен в центре дна выемки 320, а другой магнитный элемент расположен в центре верхней части датчика давления 310. Альтернативно, средство для возврата в прежнее положение 400 может быть выполнено в виде упругих элементов (не показаны), выступающих в направлении к датчику давления 310. Когда средство возврата в прежнее положение 400 выполнено в виде упругих элементов, то основная часть мыши 200, предпочтительно, может быть выполнена с выемками (не показаны) на ее наружной периферийной поверхности, в каждую из которых входит соответствующий один из упругих элементов. Упругие элементы могут, предпочтительно, быть выполнены по всей внутренней стенке выемки 320.
На фиг.26 представлен вид в поперечном разрезе, иллюстрирующий тринадцатый вариант осуществления мыши, в соответствии с изобретением.
В случае использования мыши, изображенной на фиг.25, в качестве перемещаемой мыши основная часть мыши 200 должна быть отделена от корпуса 100. Конечно, можно также использовать и основную часть мыши 200, и корпус 100 как «перемещаемую» мышь.
Как показано на фиг.26, мышь по этому варианту осуществления включает основную часть мыши 200, датчик давления 310 и корпус 100. Датчик давления 310 предусмотрен в нижнем участке основной части мыши 200 для детектирования приложенного в осевом направлении контактного давления, чтобы создать сигнал на перемещение указателя. В корпусе 100 выполнена выемка 320, в которую входит датчик давления 310 таким образом, что основная часть мыши 200 установлена на верхней поверхности корпуса 100. Датчик перемещения 220 предусмотрен в нижней части корпуса 100, чтобы обнаруживать перемещение корпуса 100 и создавать при этом сигнал на перемещение указателя.
Как описано выше, когда мышь по данному изобретению изготовлена в соответствии с конструкцией, показанной на фиг.25 и 26, наружная форма мыши может, по существу, быть такой же, как и у обычной мыши. В частности, когда пользователь использует мышь по данному изобретению в качестве перемещаемой мыши, перемещая и основную часть мыши 200, и корпус 100, у пользователя может быть ощущение, что он работает с обычной мышью. Соответственно, преимущество заключается в том, что пользователь может легко ознакомиться с мышью по данному изобретению и легко привыкнуть пользоваться ею.
На фиг.27 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий четырнадцатый вариант осуществления мыши, в соответствии с изобретением, а на фиг.28 - вид в поперечном разрезе, иллюстрирующий четырнадцатый вариант осуществления мыши, в соответствии с изобретением.
Как показано на фиг.27 и 28, мышь по данному изобретению содержит корпус 100, установленный на опорной поверхности, датчик 310 цилиндрической формы, предусмотренный на верхней поверхности корпуса 100, и основную часть мыши 200, установленную на корпусе 100. В нижнем участке основной части мыши 200 предусмотрена выемка 320, в которой размещен датчик 310.
На верхнем участке основной части мыши 200 кнопки ввода 201 и кнопка прокрутки 203 размещены в положении, удобном для пользователя. Кнопки ввода 201 поддерживают ряд функций для пользователя. Например, пользователь может нажать на кнопку и отпустить ее на какой-либо особой точке (кликнуть), переместить мышь при нажатой кнопке (перетащить) или нажать на кнопку дважды в быстрой последовательности (двойной клик). Кнопки ввода сигнала 201 могут также отобразить некоторые функциональные позиции, такие как «копировать», «вставить» и «отменить» на экране дисплея таким образом, что пользователь может выбрать одну из них. Кнопка прокрутки 203 реализована как вращающаяся, таким образом, пользователь может повернуть вверх или вниз колесико кнопки прокрутки 203 пальцем, чтобы обусловить перемещение вверх или вниз отображенного текста или графического изображения на экране дисплея.
Кнопки ввода 201 и прокрутки 203 могут также располагаться на боковой стороне корпуса 100. Поскольку мышь по данному изобретению редко смещается с опорной поверхности, то, даже если кнопки ввода 201 и прокрутки 203 предусмотрены на боковой стороне, пользователь может легко «кликнуть» кнопками ввода 201 и прокрутки 203, перемещая горизонтально основную часть мыши 200 в одном направлении.
Датчик 310 представляет собой компонент, который детектирует направление сдвига основной части мыши 200, обеспечивая перемещение указателя вслед за детектированным направлением. Работа датчика 310 будет описана следующим образом.
Датчик 310, изображенный на фиг.28, расположен в центре выемки 320, в этом положении датчика указатель не приводится в движение. Когда пользователь горизонтально смещает рукой основную часть мыши 200 из положения, показанного на фиг.28, внутренняя стенка выемки 320 контактирует с датчиком 310. Датчик 310, в свою очередь, создает сигнал на перемещение указателя, вызывая его перемещение вслед за основной частью мыши 200 в направлении, где происходит контакт внутренней стенки выемки 320 с датчиком 310. Предпочтительно, и датчик 310, и выемка 320 могут иметь цилиндрическую форму, обеспечивающую приложение некоторой одинаковой величины давления к датчику 310 независимо от направления перемещения основной части мыши 200.
После того как основная часть мыши 200, смещенная в одном направлении, обеспечивает контакт внутренней стенки выемки 320 с датчиком 310, они могут остаться в контакте друг с другом, даже если пользователь убрал свою руку с основной части мыши 200. В связи с этим указатель продолжает перемещаться, даже если пользователь уже не смещает основную часть мыши 200 в том же направлении. Упругое средство 400 является компонентом устройства, предназначенным для разрешения этой проблемы. Упругое средство 400 одним своим участком прикреплено к внутренней стенке выемки 320, а другим своим участком находится в контакте сдатчиком 310, обеспечивая при этом нахождение датчика 310 в центре выемки 320, когда к основной части мыши 200 не приложены никакие внешние усилия. Таким образом, упругое средство 400 возвращает основную часть мыши 200 в исходное положение, при котором внутренняя стенка выемки 320 расположена на расстоянии отдатчика 310.
Упругое средство 400 может быть выполнено из упругого материала, такого как губка, или упругий синтетический полимер, или пружина, такая как цилиндрическая пружина или листовая пружина.
В случае если другой конец упругого средства 400 приспособлен просто для контакта с наружной боковой поверхностью датчика 310, то, когда основная часть мыши 200 сдвигается в одном направлении, датчик 310 отводится от другого конца упругого средства 400 и при этом в выемку 320 могут попасть инородные материалы, такие как грязь или пыль. Соответственно, датчик 310 может, предпочтительно, быть выполнен с углублениями по своей наружной поверхности, в каждое из которых входит соответствующий удаленный конец упругого средства 400.
Упругое средство 400, предпочтительно, может быть установлено по всей внутренней окружности выемки 320, чтобы возвращать основную часть мыши 200 в исходное положение, даже если основная часть мыши 200 была смещена в любом направлении.
Упругое средство 400 для возврата основной части мыши 200 в исходное положение можно заменить парой магнитов для создания интерактивного усилия, при этом один из магнитов неподвижно присоединен к корпусу 100, а другой магнит неподвижно присоединен к основной части мыши 200. В качестве альтернативы, упругое средство 400 может быть выполнено в виде пружин или материала типа синтетического полимера, имеющего жесткую конструкцию, чтобы приложить возвратное усилие в направлении, перпендикулярном ориентированию корпуса 100 и основной части мыши 200. Таким образом, упругое средство 400 можно заменить любой конструкцией, которая может возвратить основную часть мыши 200 в исходное положение, при котором датчик не находится под действием контактного давления, если только не приложено внешнее воздействие.
Датчик 310, предпочтительно, может быть выполнен так, чтобы регулировать скорость указателя, в соответствии с величиной усилия, приложенного к основной части мыши 200. Более конкретно, датчик 310 может быть выполнен так, чтобы регулировать скорость указателя путем отображения детектированной величины давления, которое добавляется после контакта с внутренней стенкой выемки 320. Таким образом, обусловлено более быстрое перемещение указателя при сильном воздействии пользователя на основную часть мыши 200 и его медленное перемещение при слабом воздействии пользователя на основную часть мыши 200.
Кроме того, переключатель скорости 204 может быть предусмотрен на одной из боковых сторон основной части мыши 200 или корпуса 100 так, чтобы пользователь мог просто управлять скоростью указателя. Пользователь может ускорить или замедлить перемещение указателя путем регулирования переключателя скорости 204. В переключателе скорости 204 может быть также предусмотрена дополнительная функция, которая обеспечивает возможность перемещения указателя с заранее заданной скоростью при одном «клике» переключателя.
В качестве особенности мыши по данному изобретению в соответствии с вышеописанной конструкцией наружная форма основной части мыши 200 может иметь различные очертания, поскольку датчик находится внутри основной части мыши 200.
В случае традиционной мыши датчик 310 на внутренней стенке корпуса 100 окружает наружную окружность основной части мыши 200. Датчик 310 имеет форму кольца, а основная часть мыши 200 имеет круглую форму на виде сверху, что обеспечивает равномерность приложенного давления во всех направлениях. Пользователю неудобно держать рукой основную часть мыши 200. В мыши по данному изобретению, где датчик 310 размещен внутри основной части мыши 200, круглой должна быть только выемка 320, контактирующая сдатчиком 310, а наружная форма может иметь разнообразную конфигурацию, удобную для руки пользователя. Как показано на фиг.27, основная часть мыши 200 в устройстве мыши по данному изобретению может быть изготовлена с эргономичной обтекаемой формой, как у традиционной мыши.
Как описано выше, мышь по данному изобретению, выполненная в соответствии с тем, как показано на фиг.27 и 28, может иметь наружную форму, по существу, такую же, как у традиционной перемещаемой мыши. Преимуществом является то, что пользователь, несомненно, может легко привыкнуть к методике пользования мышью без предварительной подготовки.
На фиг.29 представлен вид в поперечном разрезе, иллюстрирующий пятнадцатый вариант осуществления мыши, в соответствии с изобретением.
Как показано на фиг.29, мышь по данному изобретению сконструирована таким образом, что датчик 310 присоединен к нижнему участку основной части мыши 200, а выемка 320 выполнена в верхней части корпуса 100. По сравнению с вариантом осуществления, показанным на фиг.27 и 28, положения корпуса 100 и датчика 310 поменялись местами друг с другом.
Несмотря на то что положения датчика 310 и корпуса 100 поменялись местами друг с другом, вариант осуществления, изображенный на фиг.29, согласуется с вариантом осуществления, представленным на фиг.27 и 28, в том, что наружная форма основной части мыши 200 может быть самой разнообразной. То же самое относится к способу управления указателем путем перемещения основной части мыши 200 и к способу возврата основной части мыши 200 в исходное положение с помощью упругого средства 400. Вариант осуществления, изображенный на фиг.29, обладает теми же преимуществами, заключающимися в том, что наружная форма основной части мыши 200 может быть выполнена разнообразной конфигурации, а последовательное перемещение указателя может быть вызвано, даже если основная часть мыши 200 не перемещается за пределы ограниченной области.
На фиг.30 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий шестнадцатый вариант осуществления мыши, в соответствии с изобретением, а на фиг.31 - шестнадцатый вариант осуществления мыши, в соответствии с изобретением, представлен в поперечном разрезе.
В мыши по данному изобретению сам датчик 310 может иметь цилиндрическую форму, как в вариантах осуществления по фиг.27 и 28. Однако датчик 310 трудно изготовить цилиндрической формы, если этот датчик выполнен в виде одного или более переключателей или в виде пластинчатых сенсоров.
В мыши по данному изобретению с датчиком 310, выполненным в виде переключателей или сенсоров, корпус 100 установлен на опорной поверхности и снабжен выступом 330, направленным вверх от его верхнего участка. Основная часть мыши 200 установлена на верхней поверхности корпуса 100, а в выемку 320 на нижней стороне основной части мыши 200 входит выступ 330. На наружной боковой поверхности выступа 330 может быть предусмотрен датчик 310.
Далее, в соответствии с этим вариантом осуществления, в котором датчик 310 присоединен к выступу 330, упругое средство 400 для возврата основной части мыши 200 в исходное положение, предпочтительно, может быть присоединено одним своим концом к внутренней стенке выемки 320, а другим концом - к наружному окружному участку выступа 330, к которому не присоединен датчик 310. В соответствии с этой конструкцией, предотвращающей контакт упругого средства 400 с датчиком 310, обеспечено преимущество фундаментального предотвращения неисправностей датчика 310, которые иным образом возникли бы из-за контакта с упругим средством 400 после перемещения основной части мыши 200.
На фиг.32 представлен вид в поперечном разрезе, иллюстрирующий семнадцатый вариант осуществления мыши, в соответствии с изобретением.
Даже в случае, когда датчик 310 присоединен к выступу 330, положения датчика 310 и выемки 320 могут поменяться местами друг с другом, как в варианте осуществления, представленном на фиг.29. Как показано на фиг.32, мышь по данному изобретению может иметь такую конструкцию, в которой выступ 330 закреплен на основной части мыши 200, а выемка 320 выполнена в корпусе 100 (то есть по сравнению с вариантом осуществления, изображенным на фиг.30 и 31, выступ 330 и выемка 320 поменялись друг с другом местами).
Соответственно, дизайнер мыши по данному изобретению может свободно менять положения выступа 330 и выемки 320 согласно внутренней структуре корпуса 100 и мыши 200.
На фиг.33 представлен вид в поперечном разрезе, иллюстрирующий восемнадцатый вариант осуществления мыши, в соответствии с изобретением, а на фиг.34 - вид в поперечном разрезе, иллюстрирующий девятнадцатый вариант осуществления мыши, в соответствии с изобретением.
В случае когда дополнительно предусмотрен выступ 330, как в вариантах осуществления на фиг.30-32, датчик 310 может не быть присоединен к наружной боковой поверхности выступа 330, а может быть присоединен к внутренней боковой поверхности выемки 320, как показано на фиг.33 и 34.
В случае когда датчик 310 присоединен к внутренней боковой поверхности выемки 320, перемещение основной части мыши 200 обусловливает перемещение датчика 310. При этом датчик 310 тесно контактирует с выступом 330, тем самым на него действует давление. В обоих случаях - когда датчик присоединен к внутренней боковой поверхности выемки 320 и когда он присоединен к наружной боковой поверхности выступа 330 - при перемещении основной части мыши 200 на датчик 310 действует давление одинаковым образом, тем самым одинаковым образом обуславливая создание сигналов на перемещение указателя.
Датчик 310, присоединенный к внутренней боковой поверхности выемки 320, обладает большей установочной поверхностью, чем датчик, присоединенный к наружной боковой поверхности выступа 330, и, таким образом, может более точно детектировать направление перемещения основной части мыши 200. В частности, в случае, когда датчик 310 выполнен в виде переключателей, на внутренней боковой поверхности выемки 320 может быть смонтировано большее количество переключателей, чем на наружной боковой поверхности выступа 330. В результате это может повысить эффект точного детектирования направления перемещения основной части мыши 200.
В случае когда датчик 310 прикреплен к внутренней стенке выемки 320, как описано выше, упругое средство 400 для возврата основной части мыши 200 в исходное положение также присоединено одним своим концом к внутренней стенке выемки 320 и находится в контакте другим своим концом с наружной боковой поверхностью выступа 330. Более предпочтительно, другой конец упругого средства 330 может быть зафиксирован на выступе 330.
На фиг.35 представлен вид в перспективе, в разобранном состоянии, иллюстрирующий двадцатый вариант осуществления мыши, в соответствии с изобретением. На фиг.36 представлен вид в поперечном разрезе, иллюстрирующий двадцатый вариант осуществления мыши, в соответствии с изобретением, а на фиг.37 - вид в поперечном разрезе, иллюстрирующий двадцать первый вариант осуществления мыши, в соответствии с изобретением.
Как показано на фиг.35-37, основная часть мыши 200 по данному изобретению может быть выполнена в виде рукоятки-стержня, нижний торец которого находится на лицевой части верхней поверхности корпуса 100.
При выполнении основной части мыши 200 в виде стержня пользователь может пользоваться мышью по данному изобретению, охватив ладонью наружную окружную поверхность основной части мыши 200, как при пользовании джойстиком.
В этом варианте осуществления, когда основная часть мыши 200 выполнена в виде вертикального удлиненного стержня, датчик 310, предпочтительно, может быть сконструирован более высоким, чем в предыдущих вариантах на фиг.1-34. Это связано с тем, что при слишком малой высоте датчика 310 датчик 310 может быть извлечен из выемки 320 при горизонтальном перемещении основной части мыши 200 в одном направлении. Как показано на фиг.35 и 36, датчик 310 и канавка 320 могут быть предусмотрены соответственно на верхнем участке корпуса 100 и в нижнем участке основной части мыши 200. Альтернативно, как показано на фиг.37, датчик 310 и выемка 320 могут быть предусмотрены соответственно на нижней стороне основной части мыши 200 и в верхнем участке корпуса 100.
На основной части мыши 200, выполненной в виде стержня, также имеются кнопки ввода 201 и переключатель скорости 204, которые предусмотрены на вершинном участке основной части мыши 200. Если кнопки ввода 201 и переключатель скорости 204 предусмотрены на наружном боковом участке основной части мыши 200, эту основную часть мыши 200 можно случайно сдвинуть в горизонтальном направлении при нажатии пользователя на кнопки ввода 201 или переключатель скорости 204, что, тем самым, вызовет перемещение указателя вопреки намерению пользователя. Соответственно, кнопки ввода 201 и переключатель скорости 204 могут, предпочтительно, быть предусмотрены на вершинном участке основной части мыши 200. Конечно, кнопки вода 201 могут также быть предусмотрены на наружной боковой поверхности основной части мыши 200 в зоне расположения пальцев пользователя. Это связано с тем, что пользователю иногда приходится нажимать на кнопки ввода 201 пальцем при продвижении основной части мыши 200 в горизонтальном направлении. Такой компонент, как переключатель скорости 204, который используется менее часто, также может быть расположен на корпусе 100.
Даже в случае выполнения основной части мыши 200 в виде рукоятки-стержня, датчик 310 может быть присоединен к наружной боковой поверхности выступа 330 (см. фиг.30-32) или к внутренней стенке выемки 320 (см. фиг.33-34).
Промышленная применимость
Как изложено выше, нет необходимости в перемещении манипулятора-мыши по данному изобретению за пределы ограниченной области, чтобы вызвать перемещение указателя, тем самым улучшается ее применимость. Поскольку не требуется перемещать мышь за пределы ограниченной области, использование такой мыши может снизить усталость в запястье пользователя, тем самым предотвращая появление боли в запястье.
Пользователь может свободно перемещать указатель на экране монитора, для этого достаточно всего лишь обеспечить место для монтажа мыши. Поскольку теперь не требуется большее пространство для перемещения мыши, чем место для ее монтажа, можно улучшить окружающую обстановку, связанную с использованием мыши.
Кроме этого, поскольку мышь можно неподвижно прикрепить к клавиатуре, это позволяет осуществить эргономичный дизайн, в соответствии с которым мышь расположена рядом с клавиатурой. В качестве преимуществ может быть уменьшена траектория, по которой осуществляются действия оператора, повышено удобство для пользователя и, таким образом, значительно улучшена работоспособность.
Мышь по данному изобретению может быть выполнена стационарного типа, при этом обеспечено последовательное перемещение указателя несмотря на то, что основная часть мыши не перемещается сверх ограниченной области, а также может быть выполнена перемещаемого типа, как традиционная перемещаемая мышь. Таким образом, мышью по данному изобретению удобно пользоваться, в соответствии с окружающими условиями, в которых она должна работать.
Когда мышь по данному изобретению используется в качестве мыши перемещаемого типа, основная часть мыши может перемещаться, будучи отделенной от корпуса, или перемещаться за одно целое с корпусом. Преимущество заключается в том, что мышь по данному изобретению может быть выполнена разнообразных форм для удовлетворения требований пользователя к обеспечению удобства.
Мышь по настоящему изобретению может быть выполнена разнообразных форм, обеспечивающих удобство для пользователя, который держит основную часть мыши в руке.
Более того, мышь по данному изобретению может обусловить перемещение указателя на некоторое расстояние, даже если основная часть мыши смещается в очень ограниченном диапазоне, при этом основная часть мыши может быть выполнена разнообразных форм, обеспечивающих удобство для пользователя, который держит ее в руке.
Кроме того, мышь по данному изобретению обеспечивает преимущества для пользователя, которые заключаются в том, что пользователь может ускорить или замедлить перемещение указателя в соответствии с величиной усилия, с которым пользователь управляет основной частью мыши, при этом основная часть мыши может также использоваться как джойстик при ее выполнении вертикальной удлиненной формы.
В то время как настоящее изобретение описано со ссылкой на конкретные иллюстративные примеры его осуществления и сопровождающие чертежи, оно не ограничено ими, а будет характеризоваться прилагаемой формулой изобретения. Следует понимать, что специалисты в данной области техники могут заменять, изменять или видоизменять варианты осуществления в различных формах, не выходя за рамки объема и сущности настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ | 2022 |
|
RU2831273C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ОБ АВАРИЙНОЙ ОСТАНОВКЕ АВТОМОБИЛЯ, В КОТОРОМ ИСПОЛЬЗОВАНА ПАЛКА ДЛЯ "СЕЛФИ" | 2015 |
|
RU2679793C1 |
| КАРТРИДЖ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ, СОДЕРЖАЩЕЕ ТАКОЙ КАРТРИДЖ | 2022 |
|
RU2830108C2 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО | 2010 |
|
RU2545031C2 |
| ПЫЛЕСОС С УСТРОЙСТВОМ ДЛЯ УСТАНОВКИ ПЫЛЕСБОРНОГО УСТРОЙСТВА (ВАРИАНТЫ) | 2005 |
|
RU2327409C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ (ВАРИАНТЫ) | 2022 |
|
RU2829096C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ | 2022 |
|
RU2822055C2 |
| ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ПЫЛЕСОСОМ | 2011 |
|
RU2478335C1 |
| СИСТЕМА ГИДРАВЛИЧЕСКОЙ ДРОБИЛКИ С БЕССТУПЕНЧАТЫМ АВТОРЕГУЛИРОВАНИЕМ ХОДА | 2015 |
|
RU2619234C2 |
| РОБОТ-ПЫЛЕСОС | 2004 |
|
RU2271923C1 |





Изобретение относится к устройствам ввода, в частности к манипуляторам типа компьютерная мышь. Технический результат заключается в уменьшении пространства, требующегося для перемещения манипулятора-мыши, и снижении за счет этого усталости в запястье руки пользователя. Технический результат достигается за счет того, что манипулятор-мышь содержит корпус, включающий в себя приемный узел, основную часть мыши, смонтированную внутри приемного узла, и датчики, размещенные на внутренней стенке приемного узла. Датчики детектируют перемещение основной части мыши при нажатии основной частью мыши, что вызывает перемещение указателя. 7 н. и 40 з.п. ф-лы, 37 ил.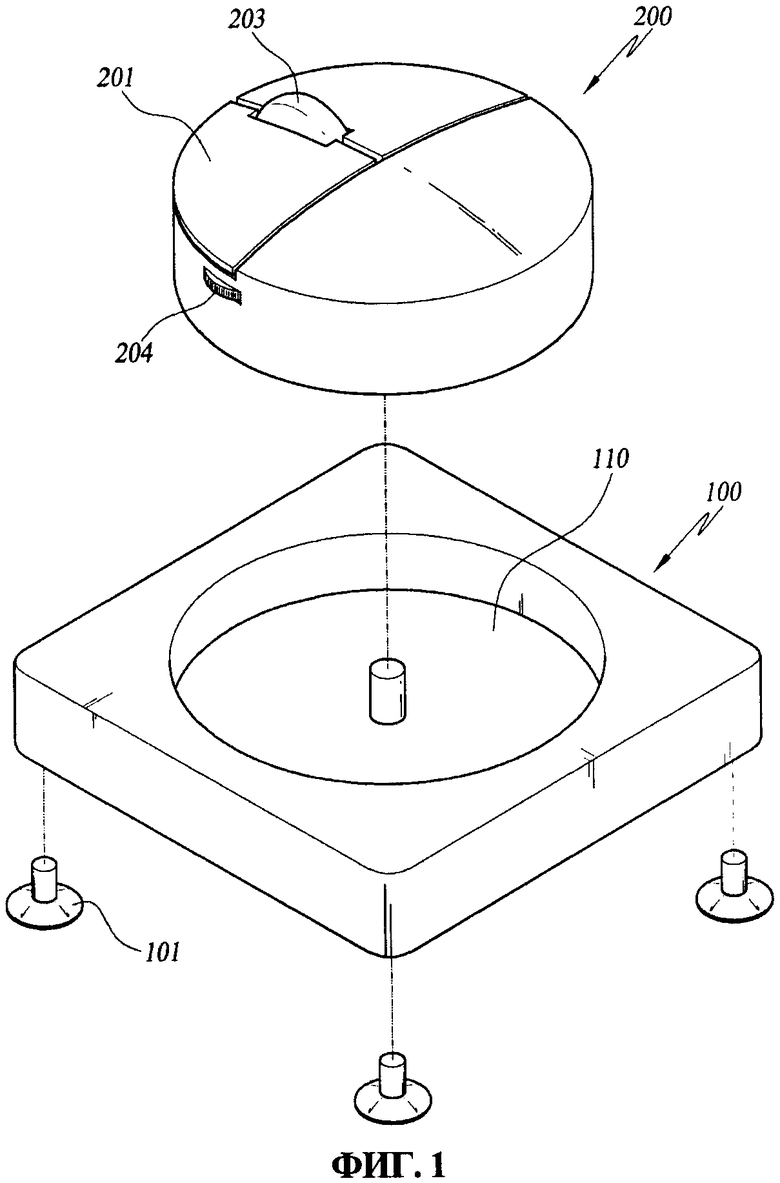
1. Манипулятор-мышь для приведения в движение указателя компьютера, содержащая:
корпус (100) с выполненным в нем приемным узлом (110);
основную часть мыши (200), установленную внутри приемного узла (110); и средство детектирования - датчик (310), расположенный на внутренней стенке приемного узла (110), причем датчик (310) детектирует перемещение основной части мыши (200) при оказании на него давления основной частью мыши (200), что приводит в движение указатель.
2. Манипулятор-мышь по п.1, в которой датчик (310) содержит сенсорный датчик давления, прикрепленный к внутренней стенке приемного узла (110).
3. Манипулятор-мышь по п.1, в которой датчик (310) содержит некоторое количество контактных датчиков давления, предусмотренных на внутренней стенке приемного узла (110), при этом каждый из контактных датчиков давления расположен на расстоянии от соседнего с ним контактного датчика давления.
4. Манипулятор-мышь по п.1, кроме того, содержащая упругое средство (400) для локализации основной части мыши (200) в центральном месте приемного узла (110) так, чтобы основная часть мыши (200) и датчик (310) находились отдельно друг от друга.
5. Манипулятор-мышь по п.4, в которой упругое средство (400) содержит:
управляющую (операционную) часть (410) с круглым нижним участком (411), вставленным в полое пространство в нижнем участке приемного узла (110), и верхним участком (412), выступающим в направлении к приемному узлу (110) так, чтобы быть соединенным с основной частью мыши (200);
некоторое количество прижимных элементов (420), соединенных с обеспечением тесного контакта с нижним участком управляющей части (410); и
пружины (430), упруго воздействующие на прижимные элементы (420) в направлении к управляющей части (410).
6. Манипулятор-мышь по п.5, в которой прижимные элементы (420) расположены с интервалом 90° друг от друга вокруг нижнего участка (411) управляющей части (410), при этом пружины (430), предусмотренные на прижимных элементах (420), развивают равную силу упругости в направлении растяжения.
7. Манипулятор-мышь по п.4, в которой упругое средство (400) содержит упругий стержень, который закреплен на центральном участке приемного узла (110) и прикреплен своим верхним концом к основной части мыши (200).
8. Манипулятор-мышь по п.1, в которой основная часть мыши (200) снабжена переключателем скорости (204) для управления скоростью перемещения указателя.
9. Манипулятор-мышь по п.1, в которой корпус (100) дополнительно содержит резиновую присоску (101) на своей нижней стороне.
10. Манипулятор-мышь по п.1, в которой корпус (100) дополнительно содержит опорную подкладку (пластину) для запястья (102).
11. Манипулятор-мышь по п.1, в которой корпус (100) прикреплен к клавиатуре (В).
12. Манипулятор-мышь по п.1, в которой корпус (100) прикреплен к компьютеру типа «ноутбук» (С).
13. Манипулятор-мышь, содержащая:
корпус (100), в котором выполнен приемный узел (110);
основную часть мыши (200), размещенную в приемном узле (110) с возможностью отделения от него;
датчик (310), расположенный на внутренней стенке приемного узла (110), для создания сигнала на перемещение указателя, по результату детектирования перемещения основной части мыши (200) во время оказания на него давления основной частью мыши (200); и
датчик перемещения (220), предусмотренный на нижней стороне основной части мыши (200), для создания сигнала на перемещение указателя, по результату детектирования перемещения основной части мыши (200), когда основная часть мыши (200) отделена от корпуса (100).
14. Манипулятор-мышь по п.13, дополнительно содержащая сигнальный кабель (500), передающий сигналы на перемещение указателя, при этом сигнальный кабель (500) подсоединен к корпусу (100) для передачи сигнала на перемещение указателя отдатчика давления (310), когда основная часть мыши (200) помещена в корпус (100), и подсоединен к основной части мыши (200) для передачи сигнала на перемещение указателя от датчика перемещения (220), когда основная часть мыши (200) отделена от корпуса (100).
15. Манипулятор-мышь по п.13, дополнительно содержащая сигнальный кабель (500), подсоединенный к основной части мыши (200) для передачи сигнала на перемещение указателя,
при этом сигнальный кабель (500) передает сигнал на перемещение указателя от датчика давления (310), когда основная часть мыши (200) помещена в корпус (100), и передает сигнал на перемещение указателя от датчика перемещения (220), когда основная часть мыши (200) отделена от корпуса(100).
16. Манипулятор-мышь по п.13, в которой каждый из датчиков - датчик (310) и датчик перемещения (220) приспособлен для передачи сигнала на перемещение указателя с помощью радиоволн, и
мышь дополнительно содержит переключатель режимов (600), предусмотренный на основной части мыши (200) так, чтобы включать/отключать датчик перемещения (220).
17. Манипулятор-мышь, содержащая:
корпус (100) с выполненным в нем приемным узлом (110);
основную часть мыши (200), размещенную в приемном узле (110) с возможностью отделения от него;
датчик (310), расположенный на внутренней стенке приемного узла (110), для создания сигнала на перемещение указателя по результату детектирования перемещения основной части мыши (200) во время контакта с основной частью мыши (200); и
датчик перемещения (220), предусмотренный на нижней стороне корпуса (100) для создания сигнала на перемещение указателя по результату детектирования перемещения корпуса (100).
18. Манипулятор-мышь по любому из предшествующих пп.13-17, дополнительно содержащая пару противолежащих магнитных элементов (440) для создания усилия притяжения, при этом один из магнитных элементов установлен на дне приемного узла (110), а другой из магнитных элементов установлен на нижней стороне основной части мыши (200).
19. Манипулятор-мышь по любому из предшествующих пп.13-17, дополнительно содержащая упругий элемент (450), выступающий в направлении от внутренней стенки приемного узла (110) к основной части мыши (200),
при этом в основной части мыши (200) выполнено углубление, в которое входит удаленный от центра конец упругого элемента (450).
20. Манипулятор-мышь по п.19, в которой упругий элемент (450) сформирован вдоль всей окружности внутренней стенки приемного узла (110).
21. Манипулятор-мышь, содержащая:
корпус (100) сдатчиком (310), установленным на верхнем участке поверхности корпуса (100), причем, датчик (310) создает сигнал на перемещение указателя по результату детектирования действующего горизонтально контактного давления;
основную часть мыши (200), смонтированную на верхнем участке поверхности корпуса (100), и имеющую выемку (320) на своей нижней поверхности для размещения датчика (310); и
датчик перемещения (220), установленный на нижней стороне основной части мыши (200) для создания сигнала на перемещение указателя по результату детектирования перемещения основной части мыши (200), когда основная часть мыши (200) отделена от корпуса (100).
22. Манипулятор-мышь по п.21, дополнительно содержащая сигнальный кабель (500), передающий сигналы на перемещение указателя, при этом сигнальный кабель (500) подсоединен к корпусу (100) для передачи сигнала на перемещение указателя отдатчика давления (310), когда основная часть мыши (200) смонтирована на корпусе (100), и подсоединен к основной части мыши (200) для передачи сигнала на перемещение указателя от датчика перемещения (220), когда основная часть мыши (200) отделена от корпуса (100).
23. Манипулятор-мышь по п.21, дополнительно содержащая сигнальный кабель (500), подсоединенный к основной части мыши (200) для передачи сигналов на перемещение указателя,
при этом сигнальный кабель (500) передает сигнал на перемещение указателя отдатчика давления (310), когда основная часть мыши (200) смонтирована на корпусе (100), и передает сигнал на перемещение указателя от датчика перемещения (220), когда основная часть мыши (200) отделена от корпуса.
24. Манипулятор-мышь по п.21, в которой каждый из датчиков - датчик (310) и датчик перемещения (220) приспособлен для передачи сигнала на перемещение указателя с помощью радиоволн, и мышь дополнительно содержит переключатель режимов (600), предусмотренный на основной части мыши (200) так, чтобы включать/отключать датчик перемещения (220).
25. Манипулятор-мышь, содержащая:
основную часть мыши (200) с датчиком (310), установленным на ее нижней стороне, причем датчик (310) создает сигнал на перемещение указателя по результату детектирования действующего горизонтально контактного давления;
корпус (100), имеющий выемку (320) на своем верхнем участке для размещения датчика (310), при этом основная часть мыши (200) смонтирована на верхнем участке корпуса (100); и
датчик перемещения (220), установленный на нижней стороне корпуса (100) для создания сигнала на перемещение указателя по результату детектирования перемещения корпуса (100).
26. Манипулятор-мышь по любому из предшествующих пп.21-25, дополнительно содержащая упругое средство (400), неподвижно присоединенное своим первым концом к выемке (320), причем упругое средство (400) вставлено своим противолежащим вторым концом в датчик (310), когда основная часть мыши (200) смонтирована на верхнем участке корпуса (100), тем самым обеспечивая расположение датчика (310) в центральной части выемки (320), в случае, когда не приложено внешнее усилие.
27. Манипулятор-мышь по любому из предшествующих пп.21-25, в которой датчик (310) выполнен цилиндрической формы, и канавка (320) выполнена цилиндрической формы.
28. Манипулятор-мышь по любому из предшествующих пп.21-25, дополнительно содержащая пару противолежащих магнитных элементов для создания усилия притяжения, при этом один из магнитных элементов установлен в углублении центральной части выемки (320), а другой магнитный элемент установлен на центральном участке конца датчика (310).
29. Манипулятор-мышь по любому из предшествующих пп.21-25, дополнительно содержащая упругий элемент, выступающий от внутренней стенки выемки (320) в направлении к датчику (310),
причем упругий элемент вставлен в боковую часть датчика (310).
30. Манипулятор-мышь по п.29, в которой упругий элемент предусмотрен вдоль по всей окружности внутренней стенки выемки (320).
31. Манипулятор-мышь по п.17 или 25, дополнительно содержащая блокировочное средство (700) для неподвижного закрепления основной части мыши (200) на корпусе (100).
32. Манипулятор-мышь по п.31, в которой блокировочное средство (700) присоединено к основной части мыши (200) с возможностью скольжения, при этом дальний конец фиксирующего средства (700) проходит внутрь корпуса (100) для совместной блокировки основной части мыши (200) и корпуса (100), при однократном нажатии на блокировочное средство, и выходит из корпуса (100) для разблокировки основной части мыши (200) и корпуса (100) при двукратном нажатии на блокировочное средство (700).
33. Манипулятор-мышь по п.31, в которой:
при блокировке основной части мыши (200) и корпуса (100) с помощью блокировочного средства (700), датчик движения (220) активируется, а датчик (310) деактивируется (отключается), и
при разблокировке основной части мыши (200) и корпуса (100) с помощью блокировочного средства (700), датчик (310) активируется, а датчик перемещения (220) деактивируется (отключается).
34. Манипулятор-мышь, содержащая:
корпус (100), помещенный на опорную поверхность;
основную часть мыши (200), помещенную на наружный участок корпуса (100); и
датчик (310), выступающий из одного из элементов - корпуса (100) или основной части мыши (200), при этом в другом из элементов - корпусе (100) или основной части мыши (200) выполнена выемка (320), в которой размещен датчик (310), причем датчик (310) создает сигнал на перемещение указателя по результату детектирования контактного давления с внутренней стенкой выемки (320).
35. Манипулятор-мышь по п.34, в которой каждый из элементов - датчик (310) и выемка (320) выполнен цилиндрической формы.
36. Манипулятор-мышь по п.34, дополнительно содержащая упругое средство (400), выступающее в направлении от внутренней стенки выемки (320) к датчику (310) так, чтобы препятствовать воздействию давления на датчик (310), если только к основной части мыши (200) не приложено внешнее усилие.
37. Манипулятор-мышь по п.36, в которой датчик (310) выполнен с углублением, в которое вставлен удаленный от центра конец упругого средства (400).
38. Манипулятор-мышь по п.36, в которой упругое средство (400) установлено вдоль по всей окружности внутренней стенки выемки (320).
39. Манипулятор-мышь по п.34, в которой датчик (310) создает сигнал на перемещение указателя таким образом, что скорость указателя изменяется в соответствии с величиной контактного давления на внутреннюю стенку выемки (320).
40. Манипулятор-мышь, содержащая:
корпус (100), помещенный на опорную поверхность;
основную часть мыши (200), помещенную на наружный участок корпуса (100); и
выступ (330), проходящий от одного из элементов - корпуса (100) или основной части мыши (200), при этом в другом из элементов - корпусе (100) или основной части мыши (200) выполнена выемка (320), в которой размещен выступ (330), причем датчик (310) установлен на наружном боковом участке выступа (330) или на внутреннем боковом участке выемки (320) для создания сигнала на перемещение указателя по результату детектирования контактного давления между выступом (330) и выемкой (320).
41. Манипулятор-мышь по п.40, в которой каждый из элементов - выступ (330) и выемка (320) выполнен цилиндрической формы.
42. Манипулятор-мышь по п.40, дополнительно содержащая упругое средство (400), выступающее в направлении от внутренней стенки выемки (320) к выступу (330) для препятствия воздействию давления на датчик (310), если только к основной части мыши (200) не приложено внешнее усилие.
43. Манипулятор-мышь по п.42, в которой выступ (330) выполнен с углублением на своем наружном боковом участке, в которое вставлен дальний конец упругого средства (400).
44. Манипулятор-мышь по п.42, в которой упругое средство (400) установлено вдоль по всей окружности внутренней стенки выемки (320).
45. Манипулятор-мышь по п.40, в которой датчик (310) создает сигнал на перемещение указателя таким образом, что скорость указателя изменяется в соответствии с величиной контактного давления с внутренней стенкой выемки (320) или наружным боковым участком выступа (330).
46. Манипулятор-мышь по любому из предшествующих пп.34-45, в которой на корпусе (100) или на основной части мыши (200) предусмотрен переключатель скорости (204) для управления скоростью указателя.
47. Манипулятор-мышь по любому из предшествующих пп.34-45, в которой основная часть мыши (200) выполнена в форме рукоятки-стержня, в котором нижний торец основной части мыши (200) находится на лицевой стороне верхней поверхности корпуса (100).
| Способ суперрегенеративного приема | 1933 |
|
SU35905A1 |
| RU 2005126600 A, 27.02.2007 | |||
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2001 |
|
RU2230354C2 |
| KR 20040097088 A, 17.11.2004 | |||
| JP 2003167674 A, 13.06.2003 | |||
| US 5726684 A, 10.03.1998. | |||

