Настоящее изобретение относится к роботу-пылесосу.
Как хорошо известно, робот-пылесос автоматически очищает некоторую зону, всасывая пыль и загрязнения с очищаемой поверхности во время автоматического передвижения по этой зоне без вмешательства пользователя.
Ниже приводится краткое описание одного примера такого робота-пылесоса, изображенного на фиг.1 и 2.
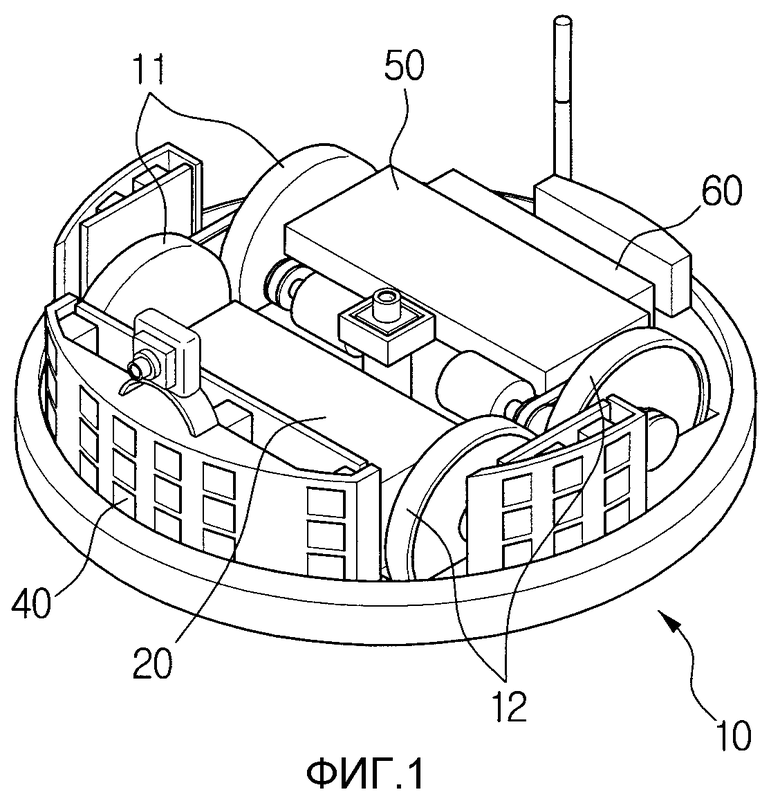
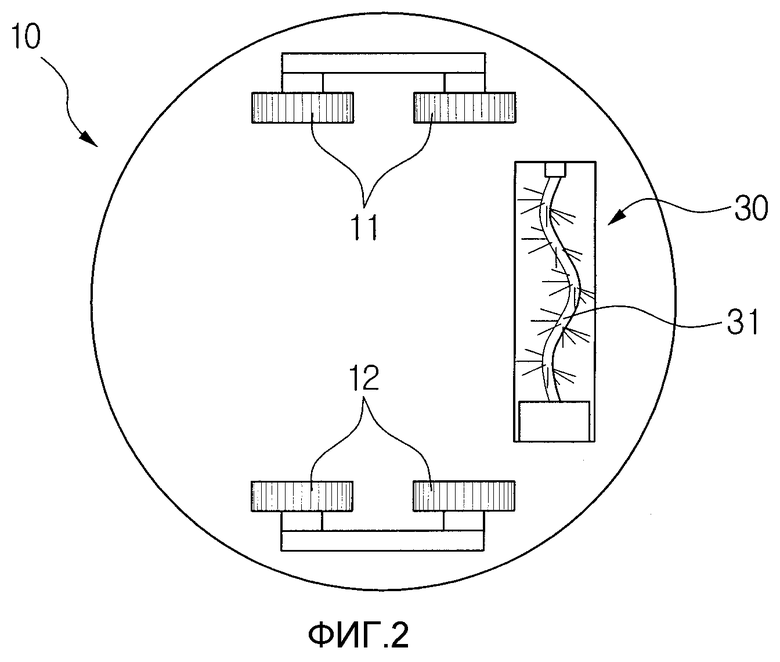
На фиг.1 представлено перспективное изображение, иллюстрирующее обычный робот-пылесос, при этом изображение его крышки опущено, на фиг.2 представлен вид снизу, соответствующий фиг.1. Позиции обозначают элементы следующим образом: корпус 10 робота, пылевсасывающий элемент 20, всасывающий проем 30, обнаруживающий элемент 40, контроллер 50 и аккумуляторная батарея 60.
Как показано на фиг.1, по обе стороны корпуса 10 пылесоса имеется совокупность подвижных колес 11, 12. Корпус 10 пылесоса имеет приблизительно круглую форму и снабжен цилиндрической крышкой (не показана).
Пылевсасывающий элемент 20 всасывает пыль с очищаемой поверхности с помощью мощного усилия всасывания, создаваемого во всасывающем канале (не показан), сформированном в корпусе 10 робота. Пылевсасывающий элемент 20 включает в себя вакуумный исполнительный механизм (не показан) и пылесборную камеру (тоже не показана) для сбора пыли, всасываемой по всасывающему каналу вследствие работы вакуумного исполнительного механизма.
Пылевсасывающий проем 30 выполнен в стороне дна корпуса 10 робота (фиг.2), сообщается по текучей среде со всасывающим каналом (не показан) и имеет вращающуюся щетку 31, расположенную в нем для очистки пыли щеткой.
Обнаруживающий элемент 40 расположен вдоль окружности корпуса 10 робота на заданном интервале для передачи сигналов в окружающее пространство и приема отраженных сигналов. Обнаруживающий элемент 40 включает в себя датчик препятствия (не показан) и датчик проходимого расстояния (не показан).
Контроллер 50 обрабатывает сигналы, получаемые с помощью приемопередатчика (не показан), и соответственно управляет соответствующими частями. Контроллер 50 приводит в движение подвижные колеса 11, 12 в ответ на сигналы из внешнего управляющего устройства (не показано) или удаленного контроллера (не показан), а также приводит в действие вакуумный исполнительный механизм (не показан) пылевсасывающего элемента 20. Контроллер 50 также управляет работой робота-пылесоса на основании сигналов, принимаемых от обнаруживающего элемента 40.
Робот-пылесос вышеупомянутой конструкции может с помощью обнаруживающего элемента 40 определять расстояние до препятствия в очищаемой зоне, например до мебели, офисных электроприборов и стен, и избирательно приводит в движение подвижные колеса 11, 12 корпуса 10 робота, автоматически изменяя направление передвижения робота-пылесоса.
Однако известный обнаруживающий препятствия элемент не может обнаружить все препятствия, и если перед роботом-пылесосом оказывается необнаруженное препятствие, робот-пылесос может не среагировать должным образом. Следовательно, внезапное столкновение с препятствием вызывает повреждения корпуса пылесоса и других его частей.
Кроме того, известный робот-пылесос не имеет функции или конструкции, которая позволяет защитить корпус робота от удара вследствие внезапного столкновения с препятствием и избежать препятствия. Вследствие этого пользователь ощущает неудобство и происходит снижение кпд очистки.
Технической задачей настоящего изобретения явилось решение проблемы известного уровня техники. Техническим результатом настоящего изобретения стало создание робота-пылесоса, который может амортизировать удар, обусловленный внезапным столкновением с неожиданным препятствием, и предотвратить повреждение робота-пылесоса, а также выполнен с возможностью избегать препятствия и продолжать операцию очистки.
Данный технический результат достигается за счет того, что создан робот-пылесос, который удаляет мусор с очищаемой поверхности, автоматически передвигаясь по заданной траектории, содержащий корпус пылесоса, имеющий приводную часть для привода робота-пылесоса и всасывающую часть для удаления мусора, бампер, прикрепленный к корпусу пылесоса для защиты корпуса пылесоса от удара при столкновении с препятствием при перемещении, опорный узел бампера для упругого опирания бампера таким образом, что бампер перемещается между первым положением, в котором бампер отстоит от корпуса пылесоса на заданное расстояние, и вторым положением, соответствующим столкновению робота-пылесоса с препятствием, в которое бампер отводится из первого положения, средство обнаружения неожиданных препятствий, включаемое и выключаемое в соответствии со смещением бампера и предназначенное для обнаружения появления неожиданного препятствия, и контроллер для управления приводной частью и всасывающей частью, определения появления препятствия в ответ на сигнал от средства обнаружения неожиданных препятствий, а также для изменения направления перемещения корпуса пылесоса, чтобы избежать препятствия.
Предпочтительно опорный узел бампера содержит пару фланцев, выполненных на противоположных сторонах бампера, каждый из которых имеет отверстие для скольжения, пару соединителей, каждый из которых имеет палец, выполненный на одном конце, для введения в отверстие для скольжения, и пару крепежных деталей, выполненных на корпусе пылесоса, для крепления других концов соединителей.
Предпочтительно робот-пылесос дополнительно содержит амортизирующий узел для упругого опирания бампера относительно корпуса пылесоса для поддержания бампера в первом положении и для амортизации удара о бампер.
Предпочтительно средство обнаружения неожиданных препятствий содержит микропереключатели, расположенные на противоположных сторонах корпуса пылесоса, каждый из которых имеет переключающую часть, и пластинчатую пружину, расположенную на корпусе пылесоса рядом с микропереключателем, для обеспечения включения и выключения микропереключателя, причем пластинчатая пружина упруго отклонена в нормальном положении для выключения переключающей части, при этом пластинчатая пружина выполнена с возможностью упругой деформации, при смещении бампера во второе положение для включения переключающей части, при этом контроллер выполнен с возможностью определения, что перед роботом-пылесосом находится неожиданное препятствие, при включении переключающей части.
Предпочтительно робот-пылесос дополнительно содержит амортизирующий узел для упругого опирания бампера относительно корпуса пылесоса для поддержания бампера в первом положении и для амортизации удара о бампер.
Предпочтительно амортизирующий узел содержит первый элемент, выступающий из внутренней стороны бампера по направлению к корпусу пылесоса и имеющий, по меньшей мере, одну пару направляющих пазов, расположенных друг против друга, второй элемент, расположенный с возможностью перемещения в первом элементе и имеющий пару выступов, выполненных на одном конце, вставляемых в направляющие пазы первого элемента, причем другой конец второго элемента контактирует с корпусом пылесоса, и упругий элемент, расположенный во втором элементе, для отклонения второго элемента наружу.
Предпочтительно опорный узел бампера содержит первый опорный элемент, выступающий из внутренней стороны бампера по направлению к корпусу пылесоса и имеющий, по меньшей мере, одну пару направляющих пазов, расположенных друг против друга, второй опорный элемент, расположенный с возможностью перемещения в первом элементе и имеющий пару выступов, выполненных на одном конце, третий опорный элемент, выступающий из другого конца второго опорного элемента и имеющий крюк, выполненный на одном конце, и четвертый опорный элемент, имеющий отверстие под крюк, выполненное в одной стороне корпуса пылесоса, для размещения в нем третьего опорного элемента.
Предпочтительно на другом конце второго опорного элемента выполнен пятый опорный элемент, который имеет передний конец, контактирующий с четвертым опорным элементом, для опирания третьего опорного элемента, вставленного в отверстие под крюк, в постоянном положении.
Предпочтительно средство обнаружения неожиданных препятствий содержит микропереключатели, расположенные на противоположных сторонах корпуса пылесоса, каждый из которых имеет переключающую часть, и пластинчатую пружину, расположенную на корпусе пылесоса рядом с микропереключателем, для обеспечения включения и выключения микропереключателя, причем пластинчатая пружина упруго отклонена в нормальном положении для выключения переключающей части, при этом пластинчатая пружина упруго деформируется при смещении бампера во второе положение для включения переключающей части, при этом контроллер выполнен с возможностью определения, что перед роботом-пылесосом находится неожиданное препятствие, при включении переключающей части.
Предпочтительно в первом положении бампер упруго опирается с помощью пластинчатой пружины.
Вышеупомянутый технический результат и преимущества настоящего изобретения станут более очевидными по прочтении описания предпочтительных конкретных вариантов осуществления настоящего изобретения, приводимого со ссылками на прилагаемые чертежи, на которых
фиг.1 - чертеж, иллюстрирующий перспективное изображение обычного робота-пылесоса;
фиг.2 - чертеж вида снизу, соответствующего фиг.1;
фиг.3 - чертеж перспективного изображения с пространственным разделением деталей, иллюстрирующий робот-пылесос, соответствующий одному конкретному варианту осуществления настоящего изобретения;
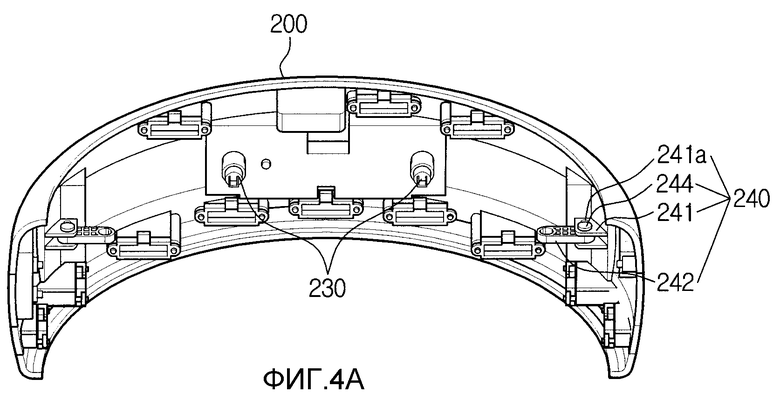
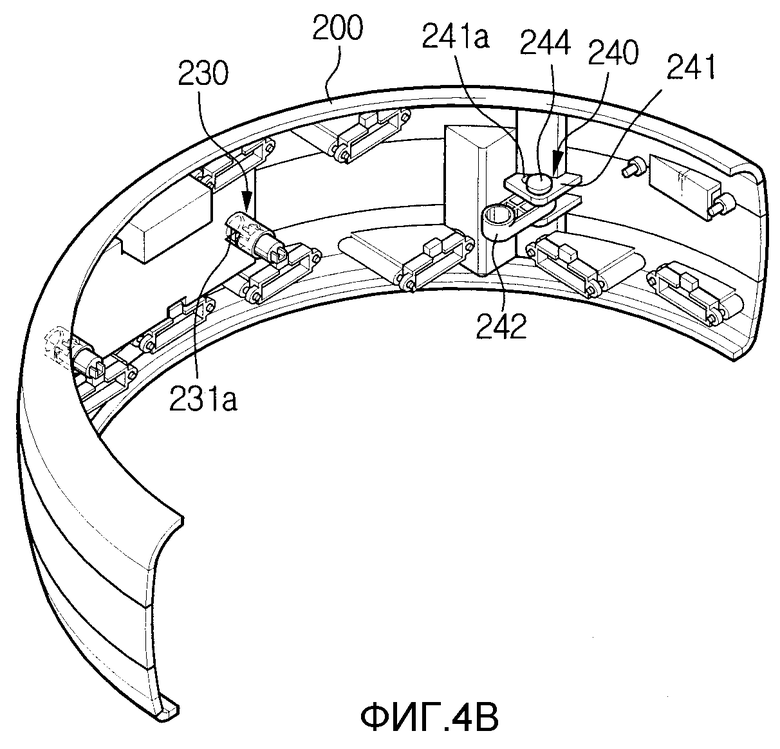
фиг.4А и 4В - чертежи, иллюстрирующие перспективное изображение внутренности бампера робота-пылесоса, соответствующего одному конкретному варианту осуществления настоящего изобретения;
фиг.5 - чертеж поперечного сечения, иллюстрирующий опорный узел бампера, соответствующий одному конкретному варианту осуществления настоящего изобретения;
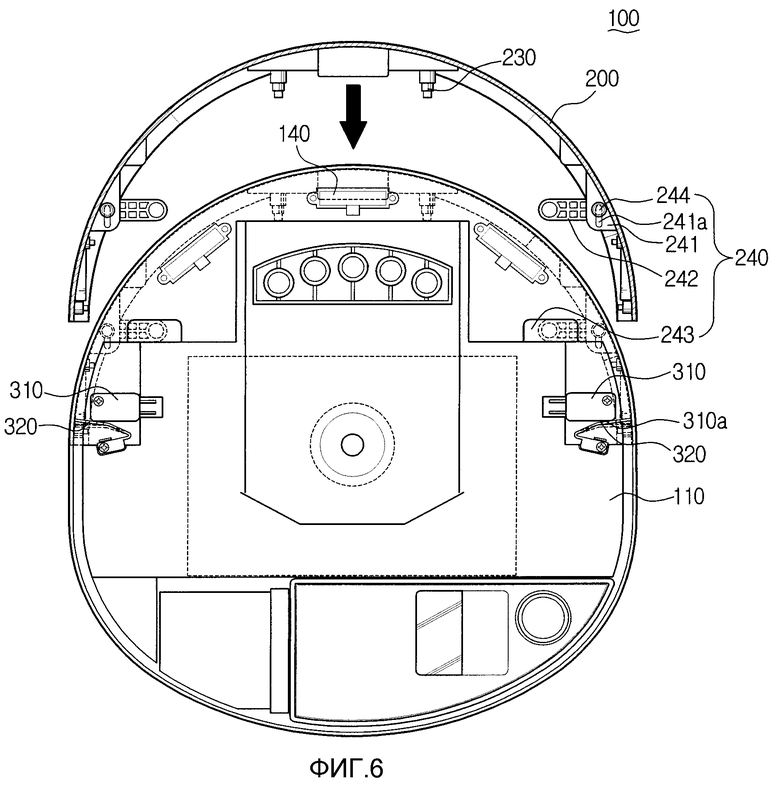
фиг.6 - чертеж, иллюстрирующий бампер робота-пылесоса и корпус пылесоса в сборе в соответствии с одним конкретным вариантом осуществления настоящего изобретения;
фиг.7 - чертеж перспективного изображения с пространственным разделением деталей, иллюстрирующий внутренность бампера робота-пылесоса, соответствующего другому конкретному варианту осуществления настоящего изобретения;
фиг.8 - чертеж поперечного сечения, иллюстрирующий опорный узел бампера робота-пылесоса, соответствующего другому конкретному варианту осуществления настоящего изобретения;
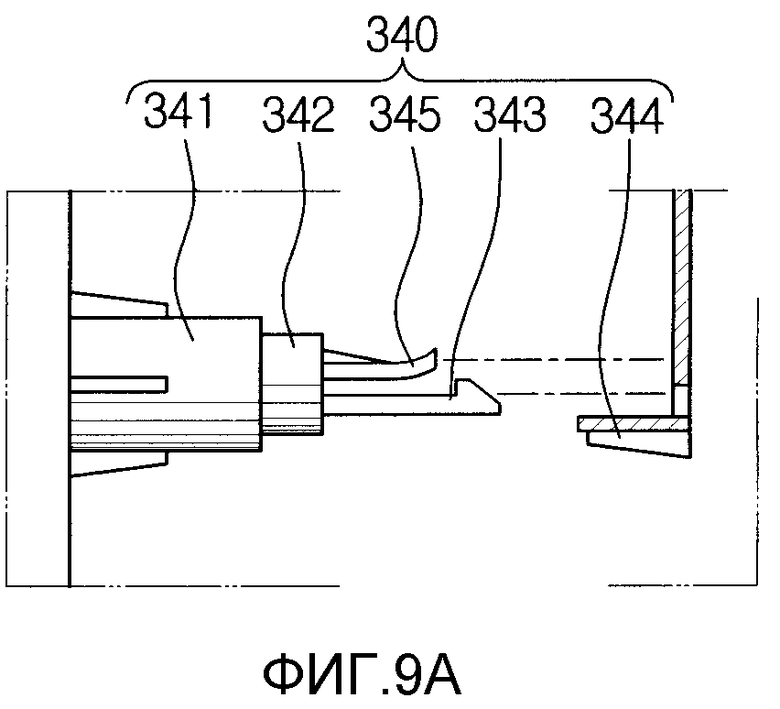
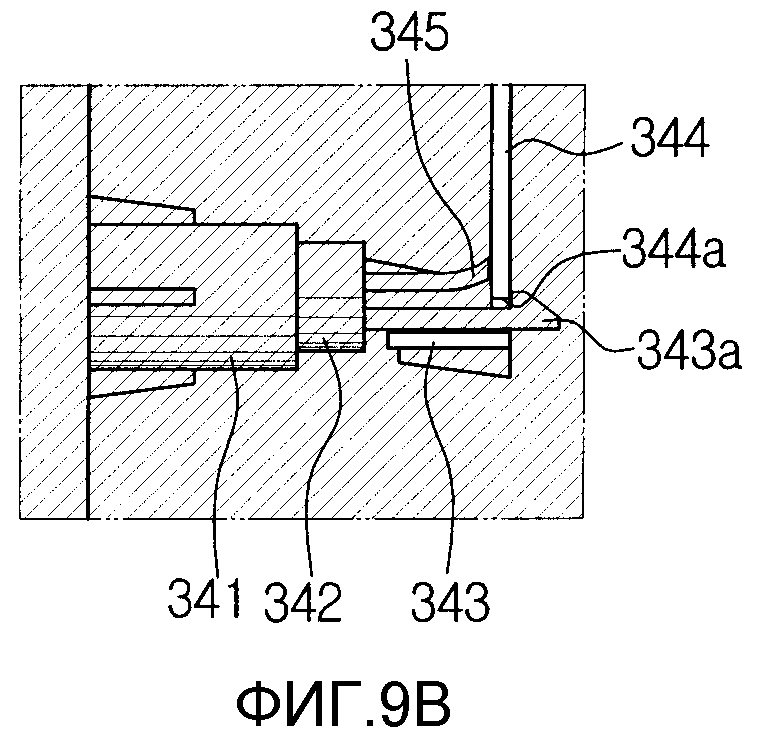
фиг.9А и 9В - чертежи, иллюстрирующие опорный узел бампера и робот-пылесос в разобранном состоянии и в сборе; и
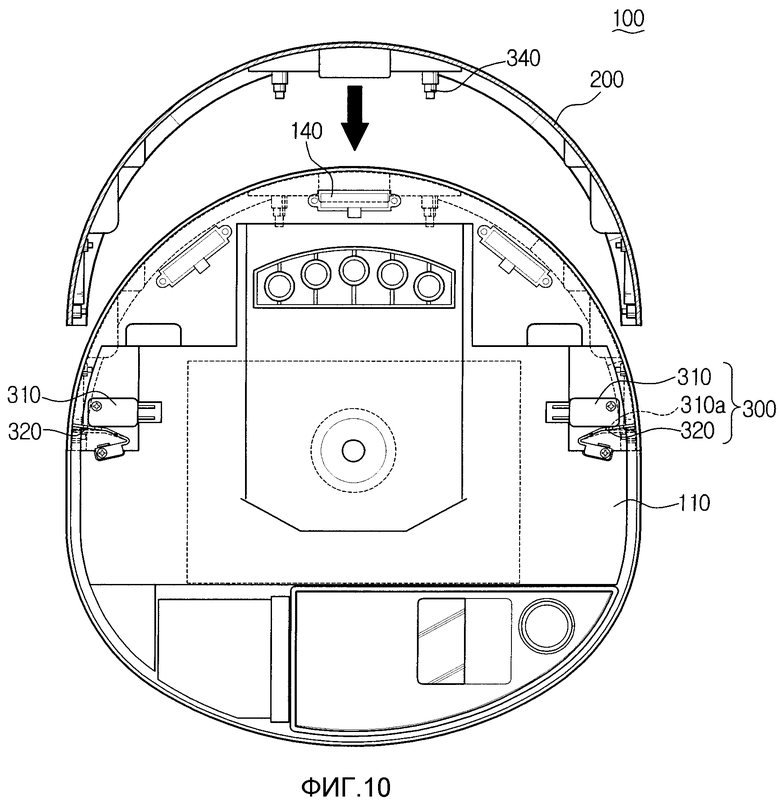
фиг.10 - чертеж, иллюстрирующий бампер робота-пылесоса и корпус пылесоса в сборе в соответствии с другим конкретным вариантом осуществления настоящего изобретения.
Далее приводится подробное описание робота-пылесоса, соответствующего конкретным вариантам осуществления настоящего изобретения, со ссылками на прилагаемые чертежи.
На фиг.3-6 представлены чертежи, иллюстрирующие робот-пылесос, соответствующий одному конкретному варианту осуществления настоящего изобретения. Как показано на фиг.3-6, робот-пылесос имеет корпус 110 пылесоса, крышку 120, бампер 200, амортизирующий узел 230, опорный узел 240 бампера, а также средство 300 обнаружения неожиданных препятствий и контроллер 400.
Корпус 110 пылесоса снабжен приводной частью (не показана) для осуществления передвижений робота-пылесоса, пылевсасывающей частью 130 для сбора пыли, всасывающим проемом (не показан), обнаруживающей частью 140 и аккумуляторной батареей (не показана). В корпусе 110 пылесоса также расположен контроллер 400, который будет подробнее описан ниже. Вышеописанная конструкция аналогична конструкции обычного робота-пылесоса, поэтому ее подробное описание опущено. Ниже приводится лишь описание отличительных признаков настоящего изобретения.
Бампер 200 соединен с корпусом 110 пылесоса с целью смягчения удара, обусловленного внезапным столкновением с неожиданным препятствием, и поэтому предотвращает повреждения корпуса 110 пылесоса. Бампер 200 предназначен для того, чтобы закрывать переднюю поверхность и частичную боковую поверхность корпуса 110 пылесоса. Например, если корпус 110 пылесоса имеет круглую форму, то бампер 200 имеет, по существу, форму полукольца. Хотя предпочтительно изготавливать бампер 200 из пластика, стойкого к ударам, это не следует считать ограничительным признаком изобретения.
Благодаря наличию бампера 200, который выполнен с возможностью смягчения удара, обусловленного внезапным столкновением с неожиданным препятствием, корпус 110 пылесоса можно защитить от удара.
Опорный узел 240 бампера обеспечивает перемещение бампера 200 между первым положением, в котором бампер 200 отстоит от корпуса 110 бампера на некоторое заданное расстояние, и вторым положением, в которое бампер 200 отводится из первого положения. Бампер 200 смещается из первого положения во второе положение, когда робот-пылесос сталкивается с препятствием, при этом бампер, по существу, принимает на себя удар о корпус 110 бампера.
Как показано на фиг.4А-6, опорный узел 240 бампера содержит фланец 241, выполненный на бампере 200, соединитель 242 и крепежную деталь 243, выполненную на корпусе 110 пылесоса.
Фланцы 241 расположены на обеих сторонах бампера 200, а каждый фланец 241 имеет выполненное в нем отверстие 241а для скольжения. Фланец 241 может быть выполнен как единое целое с бампером 200.
Соединитель 242 имеет один конец, вставленный в отверстие 241а для скольжения посредством пальца 244, и другой конец, закрепленный в крепежную деталь 243. Крепежные детали 243 находятся на обеих сторонах корпуса 110 пылесоса в соответствии с фланцами 241.
Бампер 200 перемещается между первым и вторым положениями на протяжении заданного рабочего хода, который соответствует длине отверстия 241a для скольжения.
Амортизирующий узел 230 служит бамперу 200 упругой опорой относительно корпуса 110 пылесоса для поддержания бампера 200 в первом положении, а также воспринимает удар о бампер 200. Амортизирующий узел 230 содержит первый элемент 231, второй элемент 232 и упругий элемент 233.
Первый элемент 231 имеет форму цилиндра, выступающего из внутренней стороны бампере 200 по направлению к корпусу 110 пылесоса, и имеет, по меньшей мере, одну пару направляющих пазов 231а, расположенных друг против друга.
Второй элемент 232 тоже имеет форму цилиндра, но расположен в первом элементе 231 и имеет пару выступов 232а, выполненных на одном его конце, вставляемых в направляющие пазы 231а. Другой конец второго элемента 232 контактирует с корпусом 110 пылесоса.
Упругий элемент 233 расположен во втором элементе 232 для упругого отклонения второго элемента 232 наружу от первого элемента 231.
Средства 300 обнаружения неожиданных препятствий включаются и выключаются в связи со смещением бампера 200 и обнаруживают появление неожиданного препятствия. Средства 300 обнаружения неожиданных препятствий находятся в положениях, где расположены противоположные концы бампера 200, причем такие средства содержат микропереключатель 310, имеющий переключающую часть 310а, и пластинчатую пружину 320, которая включает и выключает переключающую часть 310а микропереключателя 310 в соответствии со смещением бампера 200.
В микропереключателе 310 используется в основном хорошо известный переключатель. Пластинчатая пружина 320 расположена в подходящем положении корпуса 110 пылесоса рядом с микропереключателем 310 и упруго отклоняется, выключая переключающую часть 310а. Когда бампер 200 смещается во второе положение, конец бампера 200 оказывает нажим на пластинчатую пружину 320 и деформирует ее, тем самым включая переключающую часть 310а.
Когда микропереключатель 310 включен, контроллер 400 в ответ на сигнал из микропереключателя 310 определяет, что робот-пылесос сталкивается с неожиданным препятствием, и надлежащим образом реагирует на это, например временно изменяет направление перемещения, чтобы избежать препятствия. Если определяется, что удалось избежать препятствия, то робот-пылесос возвращается к своему первоначально заданному направлению перемещения, чтобы продолжить операцию очистки.
Как описано выше, бампер 200 робота-пылесоса, соответствующего одному конкретному варианту осуществления настоящего изобретения, воспринимает и амортизирует удар, обусловленный столкновением с неожиданным препятствием, тем самым предотвращая повреждения корпуса 110 пылесоса и других его частей. Кроме того, робот-пылесос выполнен с возможностью избегать препятствия и продолжать свое движение вдоль первоначально заданной траектории без остановок во время операции очистки.
Ниже приводится подробное описание работы робота-пылесоса вышеописанной конструкции.
Робот-пылесос осуществляет очистку, двигаясь вдоль предварительно определенной траектории в пределах изначально заданной зоны очистки. Если перед роботом-пылесосом появляется препятствие или стена, обнаруживающая часть 140 обнаруживает это, вследствие чего становится возможным избежать препятствия.
Однако если препятствие оказывается неожиданным, обнаруживающая часть 140 может не обнаружить его, что становится причиной столкновения с препятствием. В этом случае бампер 200 защищает робот-пылесос от удара, обусловленного внезапным столкновением с неожиданным препятствием.
Более конкретно, когда робот-пылесос не может избежать неожиданного препятствия и сталкивается с ним, бампер 200 смещается из первого положения во второе положение, тем самым воспринимая и амортизируя удар и предотвращая передачу удара непосредственно на корпус 110 пылесоса. Следовательно, робот-пылесос и другие внутренние части можно защитить от удара.
Когда бампер 200 отталкивается назад вследствие удара и таким образом смещается из первого положения во второе положение, пластинчатая пружина 320 деформируется из положения, в котором переключающая часть 310а находится в контакте с пластинчатой пружиной 320, и поэтому включает микропереключатель 310. Тогда контроллер 400 определяет, что робот-пылесос сталкивается с неожиданным препятствием, и управляет приводной частью, обеспечивая вращение в противоположном направлении. Робот-пылесос отходит от места, где находится препятствие.
На фиг.7-10 представлены чертежи, иллюстрирующие робот-пылесос, соответствующий другому конкретному варианту осуществления настоящего изобретения. Базовая конструкция робота-пылесоса, соответствующего другому конкретному варианту осуществления, аналогична конструкции, соответствующей предыдущему конкретному варианту осуществления. Поэтому одинаковые позиции обозначают одинаковые признаки и конструкции.
Робот-пылесос, соответствующий другому конкретному варианту осуществления настоящего изобретения, отличается от робота-пылесоса согласно предыдущему конкретному варианту осуществления конструкцией опорного узла 340 бампера для подвижного опирания корпуса 110 пылесоса между первым положением и вторым положением.
Более конкретно, опорный узел 340 бампера, соответствующий другому конкретному варианту осуществления настоящего изобретения, имеет измененный амортизирующий узел вместо амортизирующего узла 230 согласно предыдущему конкретному варианту осуществления. В этом конкретном варианте осуществления пластинчатая пружина 320 средства 300 обнаружения неожиданных препятствий действует как амортизирующий узел 230. Упругость пластинчатой пружины 320 достаточна для упругого опирания бампера 200 в первом положении. Таким образом, конструкция опорного узла 240 бампера согласно предыдущему конкретному варианту осуществления отсутствует в этом конкретном варианте осуществления.
Как показано на фиг.8-9В, опорный узел 340 бампера содержит первый опорный элемент 341, второй опорный элемент 342, третий опорный элемент 343, четвертый опорный элемент 344 и пятый опорный элемент 345.
Первый опорный элемент 341 выступает из внутренней стороны бампера 200 по направлению к корпусу 110 пылесоса и имеет, по меньшей мере, одну пару направляющих пазов 341а, расположенных друг против друга. Форма первого опорного элемента 341 является, по существу, цилиндрической, и он выполнен как единое целее с бампером 200.
Второй элемент 342 расположен с возможностью перемещения в первом элементе 341 и имеет выступы 342а, вставленные в направляющие пазы 341а. Форма второго опорного элемента 342 тоже является, по существу, цилиндрической.
Третий опорный элемент 343 выступает из одного конца второго опорного элемента 342 и имеет выполненный на одном его конце крюк 343а.
Четвертый опорный элемент 344 выполнен на одном конце корпуса 110 пылесоса для соединения с третьим опорным элементом 343 и имеет отверстие 344а под крюк, в котором зацеплен крюк 343а третьего опорного элемента 343.
Пятый опорный элемент 345 выполнен на одном конце второго опорного элемента 342 параллельно третьему опорному элементу 343 и имеет длину меньше, чем длина третьего опорного элемента 343. Когда бампер 200 собран с корпусом 110 пылесоса, третий опорный элемент 343 вставлен в отверстие 344а под крюк четвертого опорного элемента 344, а пятый опорный элемент 345 в этом случае контактирует с четвертым опорным элементом 344. Соответственно, третий опорный элемент 343, вставленный в отверстие 344а под крюк, поддерживается в постоянном положении.
Другие части и работа робота-пылесоса, соответствующего другому конкретному варианту осуществления настоящего изобретения, идентичны предыдущему конкретному варианту осуществления. Поэтому их подробное описание опущено.
Как описано выше, поскольку робот-пылесос, соответствующий другому конкретному варианту осуществления настоящего изобретения, имеет бампер 200 для амортизации удара, робот-пылесос можно защитить от удара, обусловленного внезапным столкновением с неожиданным препятствием.
Кроме того, когда робот-пылесос наталкивается своей передней частью на препятствие, бампер 200 смещается из первого положения во второе положение и поэтому воздействует на микропереключатель, вследствие чего робот-пылесос может обнаружить присутствие препятствия и изменить направление своего перемещения, чтобы избежать этого препятствия. Поэтому робот-пылесос продолжает операцию очистки без остановок во время нее, что повышает кпд очистки.
Вышеупомянутые конкретные варианты осуществления и преимущества описаны просто в качестве примера, и их не следует считать ограничивающими настоящее изобретение. Описание настоящего изобретения носит иллюстративный характер и не ограничивает объем притязаний формулы изобретения. Специалистам в данной области техники будут очевидны многочисленные возможные альтернативы, модификации и изменения. Приведенные в формуле изобретения формулировки типа «средства плюс функция» предназначены для охвата конструкций, описанных выше как выполняющих предписанные функции, и не только конструктивных эквивалентов, но и эквивалентных конструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710508C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710412C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ДЛЯ МОБИЛЬНОГО РОБОТА | 2005 |
|
RU2304423C2 |



Изобретение относится к роботу-пылесосу, который удаляет мусор с очищаемой поверхности, автоматически перемещаясь по заданной траектории. Робот-пылесос содержит корпус пылесоса, имеющий приводную часть и всасывающую часть, бампер, прикрепленный к корпусу пылесоса для защиты корпуса пылесоса от удара при столкновении с препятствием при перемещении. Бампер перемещается между первым положением, в котором бампер отстоит от корпуса пылесоса на заданное расстояние, и вторым положением, соответствующим столкновению робота-пылесоса с препятствием. Робот-пылесос снабжен средством обнаружения неожиданных препятствий, включаемым и выключаемым в соответствии со смещением бампера и предназначенным для обнаружения появления неожиданного препятствия. Робот-пылесос содержит также контроллер для управления приводной частью и всасывающей частью, определения появления препятствия в ответ на сигнал от средства обнаружения неожиданных препятствий, а также для изменения направления перемещения корпуса пылесоса, чтобы избежать препятствия. Изобретение позволит амортизировать удар, обусловленный внезапным столкновением с неожиданным препятствием, предотвратить повреждение робота-пылесоса, а также избегать препятствия. 9 з.п. ф-лы, 10 ил.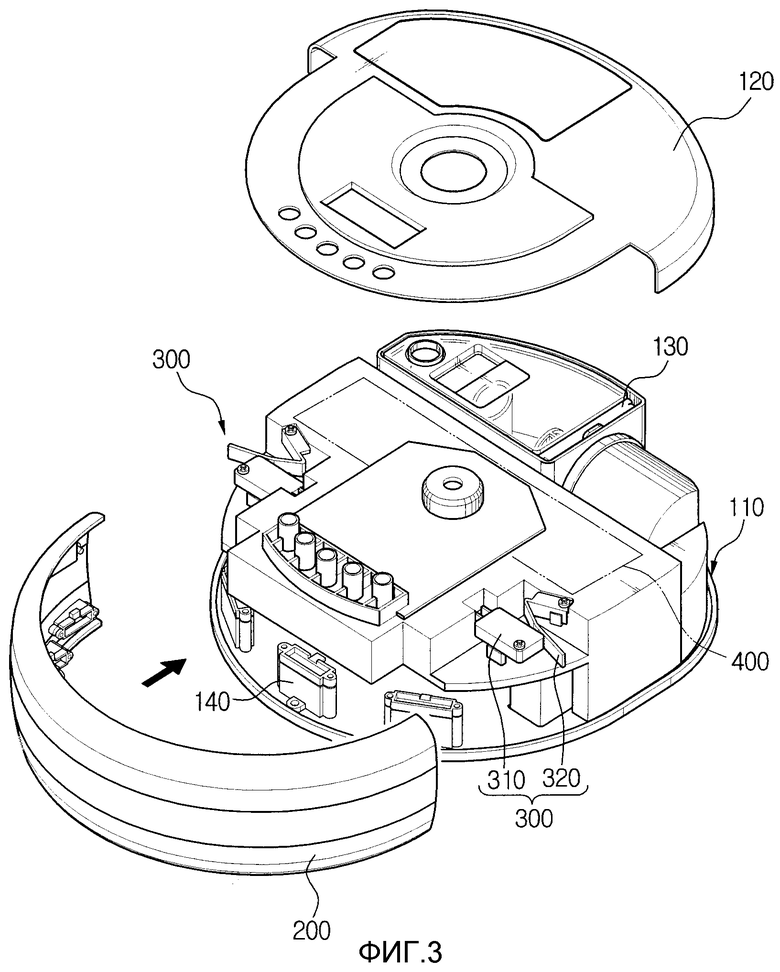
| RU 2001118749 А, 27.03.2003 | |||
| RU 2001118746 A, 27.03.2003 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

