Предложенный способ относится к электротехнике, в частности к автоматизированному электроприводу, и предназначен для автоматического регулирования тока электродвигателей переменного тока, электродвигателей постоянного тока, активных корректоров коэффициента мощности.
Известен способ, например (а.с. СССР №1533904, кл. 5 B60L 15/04, 1987), заключающийся в том, что формируют первую и вторую последовательности синхронизирующих импульсов постоянной частоты с периодом, равным заданному периоду вынужденных колебаний регулируемого тока электродвигателя, причем вторая последовательность сдвинута относительно первой на половину периода, формируют верхний и нижний уровни ограничения тока, при этом верхний уровень ограничения тока больше уровня тока уставки на величину заданной ширины зоны гистерезиса, а нижний уровень ограничения тока меньше уровня тока уставки на величину заданной ширины зоны гистерезиса, измеряют текущее значение тока электродвигателя, сравнивают его с верхним и нижним уровнем ограничения тока и в случае превышения током электродвигателя верхнего уровня ограничения тока отключают электродвигатель от источника питания, а при поступлении синхронизирующих импульсов первой последовательности подключают электродвигатель к источнику питания, а в случае уменьшения тока электродвигателя ниже нижнего уровня ограничения тока подключают электродвигатель к источнику питания, а при поступлении синхронизирующих импульсов второй последовательности отключают электродвигатель от источника питания.
Однако указанный способ не обеспечивает хорошего качества регулирования из-за наличия статической ошибки регулирования тока двигателя. Кроме того, при использовании указанного способа в электроприводе возможно возникновение "вырожденного" режима, синхронизированного обеими последовательностями синхронизирующих импульсов, когда переключение преобразователя происходит исключительно по синхронизирующим импульсам первой и второй последовательностей, а также возможно возникновение субгармонических и хаотических колебаний в диапазоне изменения коэффициента заполнения тиристорного преобразователя, близком к 0,5.
Известен также способ (а.с. СССР №1413697, кл. 4 Н02Р 5/06, 1987), заключающийся в том, что формируют первую и вторую последовательности синхронизирующих импульсов постоянной частоты с периодом, равным заданному периоду вынужденных колебаний регулируемого тока электродвигателя, причем вторая последовательность сдвинута относительно первой на половину периода, формируют верхний и нижний уровни ограничения тока, при этом верхний уровень ограничения тока больше уровня тока уставки на величину заданной ширины зоны гистерезиса, а нижний уровень ограничения тока меньше уровня тока уставки на величину заданной ширины зоны гистерезиса, измеряют текущее значение тока электродвигателя, сравнивают его с верхним и нижним уровнем ограничения тока и в случае превышения током электродвигателя верхнего уровня ограничения тока отключают электродвигатель от источника питания, а при поступлении синхронизирующих импульсов первой последовательности подключают электродвигатель к источнику питания, а в случае уменьшения тока электродвигателя ниже нижнего уровня ограничения тока подключают электродвигатель к источнику питания, а при поступлении синхронизирующих импульсов второй последовательности отключают электродвигатель от источника питания. При этом для уменьшения статической ошибки регулирования тока используется цифровая коррекция уровня тока уставки, что важно при программном автоведении скоростного электрического подвижного состава и прицельном его торможении. Сущность коррекции заключается в смещении текущего уровня тока уставки на величину измеряемой статической ошибки регулирования тока. Кроме того, одновременно с дополнительной коррекцией тока уставки при изменении алгоритма управления тиристорным преобразователем при коэффициенте тиристорного преобразователя 0,5 осуществляется стабилизация коэффициента заполнения на время 10-50 периодов регулирования тока Т в зависимости от инерционных свойств объекта регулирования, что практически устраняет колебания регулируемого тока с частотами, меньшими частоты регулирования.
Однако указанный способ позволяет уменьшить величину статической ошибки регулирования тока двигателя в два раза, но не позволяет исключить ее полностью. Кроме того, для реализации указанного способа используется достаточно сложная цифровая система управления, что снижает функциональную надежность системы.
Известен способ (патент РФ №2256286, кл. Н02Р 5/175, 2003), заключающийся в том, что формируют две последовательности синхронизирующих импульсов постоянной частоты, сдвинутые относительно друг друга на половину периода, формируют верхний и нижний уровни ограничения тока, при этом верхний уровень ограничения тока больше уровня тока уставки на величину заданной ширины зоны гистерезиса, а нижний уровень ограничения тока меньше уровня тока уставки на величину заданной ширины зоны гистерезиса, измеряют текущее значение тока электродвигателя, сравнивают его с верхним и нижним уровнем ограничения тока и в случае превышения током электродвигателя верхнего уровня ограничения тока отключают электродвигатель от источника питания, а при поступлении синхронизирующих импульсов первой последовательности подключают электродвигатель к источнику питания, а в случае уменьшения тока электродвигателя ниже нижнего уровня ограничения тока подключают электродвигатель к источнику питания, а при поступлении синхронизирующих импульсов второй последовательности отключают электродвигатель от источника питания. При этом для исключения статической ошибки регулирования определяют текущую ошибку регулирования, интегрируют ее и в случае, если величина интеграла ошибки регулирования превышает по модулю заданную ширину зоны гистерезиса, ограничивают полученное значение интеграла ошибки регулирования сверху или снизу величиной заданной ширины зоны гистерезиса, затем суммируют полученную величину с текущим уровнем тока уставки, в результате чего получают величину скорректированного уровня тока уставки, а затем новое текущее значение тока электродвигателя сравнивают с новым верхним и нижним уровнями ограничения тока и повторяют процесс описанным образом. Этот способ принят за прототип.
Однако указанный способ не позволяет полностью устранить ошибку регулирования при использовании переменной уставки тока.
Технической задачей изобретения является повышение качества регулирования и функциональной надежности системы.
Технический результат достигается за счет того, что формируют две последовательности синхронизирующих импульсов постоянной частоты, сдвинутые относительно друг друга на половину периода, формируют верхний и нижний уровни ограничения тока, при этом верхний уровень ограничения тока больше уровня тока уставки на величину заданной ширины зоны гистерезиса, а нижний уровень ограничения тока меньше уровня тока уставки на величину заданной ширины зоны гистерезиса, измеряют текущее значение тока электродвигателя, сравнивают его с верхним и нижним уровнями ограничения тока и в случае превышения током электродвигателя верхнего уровня ограничения тока отключают электродвигатель от источника питания, а при поступлении синхронизирующих импульсов первой последовательности подключают электродвигатель к источнику питания, а в случае уменьшения тока электродвигателя ниже нижнего уровня ограничения тока подключают электродвигатель к источнику питания, а при поступлении синхронизирующих импульсов второй последовательности отключают электродвигатель от источника питания. Для исключения статической ошибки регулирования определяют текущую ошибку регулирования, интегрируют ее и в случае, если величина интеграла ошибки регулирования превышает по модулю заданную ширину зоны гистерезиса, ограничивают полученное значение интеграла ошибки регулирования сверху или снизу величиной заданной ширины зоны гистерезиса, затем суммируют полученную величину с текущим уровнем тока уставки, в результате чего получают величину скорректированного уровня тока уставки. При этом для увеличения точности регулирования переменного тока производится перерасчет заданной ширины зоны гистерезиса. Новое значение ширины зоны гистерезиса вычисляется путем умножения двух величин. Первая величина равна половине размаха пульсаций ошибки регулирования, определенного между двумя импульсами одной из синхронизирующих последовательностей как разница между значением ошибки регулирования в момент подключения к источнику питания положительной полярности и значением ошибки регулирования в момент подключения к источнику питания неположительной полярности. Вторая величина равна сумме двух слагаемых, первое слагаемое которой является частным, в котором числитель равен единице, а знаменатель равен произведению четырех, величины относительной длительности подключения электродвигателя к источнику питания положительной полярности, которая определяется как отношение длительности подключения в течение одного периода синхронизации электродвигателя к источнику питания положительной полярности к величине периода следования синхронизирующих импульсов, разности единицы и величины относительной длительности подключения электродвигателя к источнику питания положительной полярности. Второе слагаемое равно произведению постоянной времени интегратора, периода следования синхронизирующих импульсов и одной четвертой. Если относительная длительность подключения электродвигателя к источнику питания положительной полярности не равна нулю или единице и новая величина ширины зоны гистерезиса не превышает величины заданной ширины зоны гистерезиса, то новую величину ширины зоны гистерезиса используют для формирования верхнего и нижнего уровней ограничения тока, а затем новое текущее значение тока электродвигателя сравнивают с новым верхним и нижним уровнями ограничения тока и повторяют процесс описанным образом.
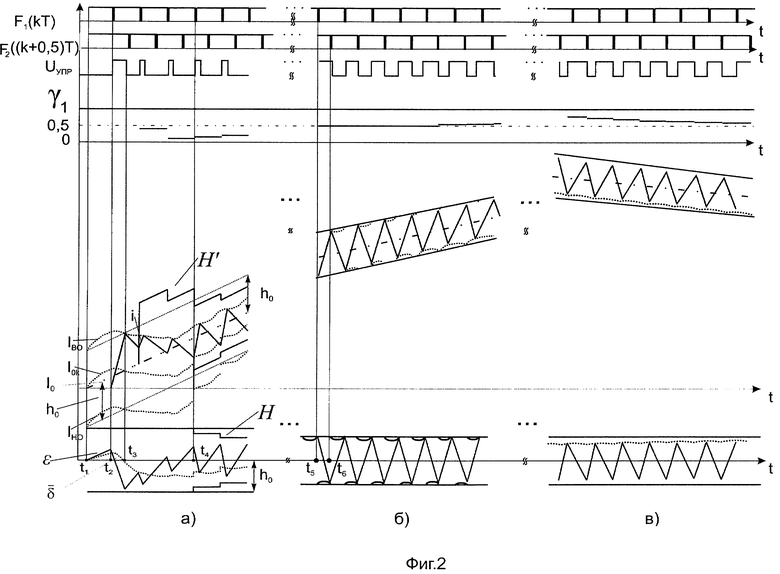
На фиг.1 схематично показано устройство реализации предлагаемого способа; на фиг.2 - временные диаграммы, поясняющие принцип работы способа.
Релейно-импульсный регулятор тока индуктивной нагрузки содержит сумматор 1, на его прямой вход подается сигнал текущего уровня уставки тока, а инверсный вход соединен с выходом датчика тока 21, модуля коррекции уставки (МКУ), модуль коррекции гистерезиса (МКГ), модуль формирования управляющих сигналов (МФУС), генератор синхронизирующих последовательностей 8, полумостовой инвертор напряжения 20, одну из статорных обмоток асинхронного электродвигателя 22. Элементы, из которых формируются модули МКУ, МКГ и МФУС, выделены штриховой линией. МКУ состоит из интегратора 7, на вход которого подается сигнал ошибки регулирования, выход которого соединен с входом ограничителя 9, выход которого соединен с входом сумматора 10, на первый вход которого подается текущее значение уровня уставки тока. МКГ состоит из триггера 2, входы которого соединены с выходами триггера 19 и сумматора 1, таймера 3, входы которого соединены с выходом триггера 19, сумматора 4, прямой вход которого соединен с выходом триггера 2, который имеет значение, зарегистрированное по нарастающему фронту выходного значения триггера 19, инверсный вход которого соединен с выходом триггера 2, который имеет значение, зарегистрированное по спадающему фронту выходного значения триггера 19, арифметико-логического элемента расчета ширины зоны гистерезиса 6, входы которого соединены с выходами таймера 3 и сумматора 4. МФУС состоит из сумматора 13, входы которого соединены с выходом сумматора 10 и выходом арифметико-логического элемента 6, сумматора 14, прямой вход которого соединен с выходом сумматора 10, инверсный вход которого соединен с входом арифметико-логического элемента 6, компаратора 11, прямой вход которого соединен с выходом датчика тока 21, а инверсный вход которого соединен с выходом сумматора 13, компаратора 12, второй прямой вход которого соединен с выходом сумматора 14, а инверсный вход которого соединен с выходом датчика тока 21, элемента "ИЛИ-НЕ" 15, входы которого соединены с выходом компаратора 12 и вторым выходом генератора синхронизирующих последовательностей 8, элемента "ИЛИ-НЕ" 16, входы которого соединены с выходом компаратора 11 и первым выходом генератора синхронизирующих последовательностей 8, элемента "ИЛИ-НЕ" 17, входы которого соединены с выходом элемента "ИЛИ-НЕ" 15 и выходом компаратора 11, элемента "ИЛИ-НЕ" 18, входы которого соединены с выходом элемента "ИЛИ-НЕ" 16 и выходом компаратора 12, триггера 19, R-вход которого соединен с выходом элемента "ИЛИ-НЕ" 17, S вход которого соединен с выходом элемента "ИЛИ-НЕ" 18, прямой выход триггера 19 соединен с входом полумостового инвертора напряжения 20.
На фиг.1 и фиг.2 обозначено: UП - постоянное положительное напряжение источника постоянного напряжения; F1(kT) - напряжение на первом выходе формирователя синхронизирующих последовательностей 8 (сигнал первой синхронизирующей последовательности); F2((k+0,5)T) - напряжение на втором выходе формирователя синхронизирующих последовательностей 8 (сигнал второй синхронизирующей последовательности); Т - период следования синхронизирующих импульсов; UУПР - напряжение на прямом выходе триггера 19; I0 - заданный уровень тока уставки; IОК - скорректированный уровень тока уставки; IНО - нижний уровень ограничения тока; IВО - верхний уровень ограничения тока; iН - ток через нагрузку; Н - напряжение, соответствующее ширине зоны гистерезиса; δ - напряжение на выходе интегратора;  - напряжение коррекции уровня тока уставки на выходе сумматора 9; ε - ошибка регулирования; Δε - размах пульсаций ошибки регулирования; γ - относительная длительность подключения нагрузки к источнику питания положительной полярности, определяемая как отношение продолжительности высокого потенциала на прямом выходе триггера 19 в течение одного периода синхронизации к периоду Т.
- напряжение коррекции уровня тока уставки на выходе сумматора 9; ε - ошибка регулирования; Δε - размах пульсаций ошибки регулирования; γ - относительная длительность подключения нагрузки к источнику питания положительной полярности, определяемая как отношение продолжительности высокого потенциала на прямом выходе триггера 19 в течение одного периода синхронизации к периоду Т.
Задающий формирователь импульсных последовательностей 8 формирует первую F1(kT) и вторую F2((k+0,5)T) последовательность синхронизирующих импульсов постоянной частоты 1/Т0, сдвинутые относительно друг друга на 180°.
На вход "I0" подается постоянное напряжение, пропорциональное величине заданной уставки тока, а на вход "h0" подается постоянное напряжение, пропорциональное начальной ширине зоны гистерезиса h0.
В зависимости от величины относительной длительности подключения нагрузки к источнику питания положительной полярности γ автоматически определяется алгоритм переключений релейно-импульсного регулятора и, соответственно, подачи управляющих импульсов на полумостовой инвертор напряжения 20, а именно при γ<0,5 на подключение нагрузки к напряжению питания +UП преобразователя воздействуют импульсы напряжения первой синхронизирующей последовательности F1(kT), а на подключение нагрузки к напряжению питания -UП - импульсы, формируемые релейным способом компаратором 12 (фиг.1) при превышении регулируемым током iН верхнего уровня ограничения тока IВО (фиг.2а). При γ=0,5 на подключение нагрузки к напряжению питания +UП преобразователя воздействуют импульсы напряжения первой синхронизирующей последовательности F1(kT), а на подключение нагрузки к напряжению питания -UП преобразователя воздействуют импульсы напряжения второй синхронизирующей последовательности F2((k+0,5)T) (фиг.2б). При γ>0,5 на подключение нагрузки к напряжению питания +UП преобразователя воздействуют импульсы, формируемые релейным способом компаратором 13 (фиг.1) при уменьшении регулируемого тока iН (фиг.2в) ниже нижнего уровня ограничения тока IНО, а на подключение нагрузки к напряжению питания -UП - импульсы напряжения второй синхронизирующей последовательности F2((k+0,5)T) (фиг.2в).
В исходном состоянии напряжение уставки тока I0 равно нулю, формирователь импульсных последовательностей не активен и, соответственно, ключи инвертора находятся в непроводящем режиме и статорная обмотка асинхронного электродвигателя отключена от источника постоянного напряжения (фиг.2а). Напряжение, пропорциональное ошибке регулирования ε на выходе сумматора 1 (фиг.1), равно нулю, соответственно, на выходе интегратора 7 напряжение также равно нулю, которое далее ограничивается сверху ограничителем 9 до уровня заданной ширины зоны гистерезиса Н (фиг.2а), после чего суммируется на сумматоре 10 (фиг.1) с напряжением уставки I0 (фиг.2а). В результате суммирования получают скорректированный уровень тока уставки IОК, который далее подается на входы сумматоров 14 и 15. На сумматоре 14 к скорректированному уровню тока уставки IОК прибавляется напряжение, пропорциональное ширине зоны гистерезиса H, а на сумматоре 5 из IОК вычитается напряжение, пропорциональное ширине зоны гистерезиса H. Напряжения на выходах сумматоров 14 и 15, соответствующие верхнему IВО и нижнему IНО уровням ограничения тока, сравниваются с величиной напряжения, пропорционального току нагрузки iН и получаемого с датчика тока 21. Работа предлагаемого способа заключается в следующем. При включении системы, например, в момент времени t1 уставка I0 начинает изменяться по синусоидальному закону, формирователь импульсных последовательностей начинает работать, при этом текущая ошибка регулирования ε(t), определяемая как разность между уровнем уставки тока I0 и текущим значением тока двигателя iC(t) в соответствии с формулой

увеличивается, но так как ток нагрузки не превысил уровня верхнего тока ограничения и не уменьшился до нижнего уровня ограничения тока, то не происходит подключения нагрузки к питающему напряжению.
Напряжение, пропорциональное текущей ошибке регулирования, подается на вход интегратора 8, где интегрируется в соответствии с формулой

где τ - постоянная времени интегратора.
Напряжение, пропорциональное интегралу ошибки регулирования δ(t), на выходе интегратора 8 одновременно с увеличением текущей ошибки регулирования ε(t) увеличивается (фиг.2а).
В силу того что напряжение на выходе интегратора δ(t) может быть больше уровня гистерезиса Н, оно ограничивается ограничителем 9 до уровня заданного гистерезиса Н согласно условию

Ширина зоны гистерезиса h0 выбирается исходя из условия

где ΔiMAX - максимальный размах пульсаций тока нагрузки.
В течение одного периода с момента времени t1 относительная длительность подключения электродвигателя к источнику питания положительной полярности (γ) равна нулю и величина скорректированного гистерезиса Н остается неизменной, а именно равной заданному значению h0.
На сумматоре 10 происходит суммирование полученного на выходе ограничителя 9 напряжения коррекции с заданным уровнем уставки тока I0, в результате чего получают скорректированный уровень уставки тока

Допустим, что в момент времени t2 ток i нагрузки не достиг значения верхнего уровня ограничения тока IВО, но в этот момент на входе элемента ИЛИ-НЕ 17 поступает импульс первой синхронизирующей последовательности F1(kT), который через элемент ИЛИ-НЕ 18 воздействует на S-вход триггера 19 и устанавливает его в состояние с напряжением на прямом выходе UУПР, равным "1", что приводит к подключению нагрузки к напряжению питания +UП (фиг.1). Напряжение коррекции и, соответственно, величина скорректированного уровня увеличиваются до тех пор, пока среднее значение регулируемого тока нагрузки iН не достигнет величины заданного уровня тока уставки I0. Исключение статической ошибки регулирования достигается за счет большого коэффициента передачи по постоянному току интегратора 7, а ограничение перерегулирования - за счет выбора уровня ограничения ограничителя 9, который в рассматриваемом способе равен заданной ширине зоны гистерезиса h0. Величина постоянной времени τ интегратора 7 выбирается из диапазона (3…10Т), где Т - период синхронизирующих последовательностей F1 и F2. Выбор меньших значений τ приводит к потере устойчивости системы. Выбор больших значений τ приводит к затягиванию переходных процессов в системе, однако не влияет на статическую точность системы.
Статорная обмотка асинхронного электродвигателя остается подключенной к напряжению питания +UП до момента времени t3, когда ее ток достигает значения IВО, срабатывает компаратор 11, который воздействует через элемент ИЛИ-НЕ 17 на R-вход триггера 19 и происходит переключение на напряжение питания -UП. Вновь подключение к +UП происходит по импульсу первой синхронизирующей последовательности. Периодический процесс повторяется (фиг.2а).
За время, равное периоду синхронизации Т0 с момента времени t2, величина γ становится отличной от 0 и 1, поэтому в элементе 6 в соответствии с формулой

вычисляется скорректированное значение гистерезиса, где Δε - размах пульсаций ошибки регулирования за времени (t2; t2+T). Но величина Н' превышает начальное значение гистерезиса h0, поэтому H не изменяется и равно h0.
В момент времени t4 значение Н' становится меньше h0, и действующее значение гистерезиса Н устанавливается равным Н'.
 .
.
При увеличении тока уставки I0 увеличивается величина γ и амплитуда пульсаций регулируемого тока. В момент, при котором γ=0,5, пульсации становятся максимальными и переключение происходит по импульсам синхронизирующих последовательностей F1 и F2 (фиг.2б) соответственно в моменты времени t5 и t6. Так как величина гистерезиса скорректирована в ходе функционирования регулятора элементом 6 (фиг.1), то автоматическая смена алгоритма формирования управляющих импульсов, подаваемых на ключевые элементы инвертора 22 (фиг.1), происходит без возникновения статической ошибки регулирования (фиг.2б).
Таким образом, рассмотренный способ релейно-импульсного регулировании тока индуктивной нагрузки заключается в том, что измеряют ток электродвигателя, определяют ошибку регулирования, далее полученную ошибку регулирования интегрируют и ограничивают величину интеграла сверху и снизу величиной заданной ширины зоны гистерезиса. Полученную величину коррекции затем суммируют с заданным уровнем тока уставки. В результате получают скорректированное значение уровня уставки тока. Также в ходе работы регулятора происходит коррекция начального значения ширины зоны гистерезиса, что позволяет уменьшить статическую ошибку, которая возникает при смене алгоритмов релейного регулирования в области γ, близкой к 0,5, и изменить значение ширины зоны гистерезиса с целью устранения режимов функционирования, при которых размах пульсаций ошибки регулирования превышает значение ширины зоны гистерезиса и частота переключения ключей больше частоты синхронизирующих импульсов.
Предложенный способ позволяет повысить качество регулирования путем исключения статической ошибки регулирования тока электродвигателей постоянного и переменного тока во всем диапазоне изменения γ, а также обеспечить автоматическую смену алгоритма подачи импульсов на полупроводниковый преобразователь при равенстве коэффициента заполнения 0,5. Увеличение функциональной надежности системы происходит за счет автоматического увеличения/уменьшения значения ширины зоны гистерезиса посредством коррекции значения ширины зоны гистерезиса в случае изменения параметров нагрузки и/или питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2003 |
|
RU2256286C1 |
| СИСТЕМА ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ | 2003 |
|
RU2248659C2 |
| Устройство для регулирования тока тягового электродвигателя постоянного тока транспортного средства | 1987 |
|
SU1533904A1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЗОНАНСНЫМ ИНВЕРТОРОМ СО ВСТРЕЧНО-ПАРАЛЛЕЛЬНЫМИ ДИОДАМИ | 2005 |
|
RU2286000C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для релейно-импульсного регулирования тока тягового электродвигателя транспортного средства | 1988 |
|
SU1572849A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2490103C1 |
Изобретение относится к области электротехники и может быть использовано для автоматического регулирования тока электродвигателей постоянного тока в системах автоматизированного электропривода переменного тока, построенных на базе асинхронных электродвигателей, в активных корректорах коэффициента мощности. Техническим результатом является повышение качества регулирования и функциональной надежности системы. В способе импульсного регулирования электродвигателе постоянного и переменного тока производят перерасчет заданной ширины зоны гистерезиса. Новое значение ширины зоны гистерезиса вычисляют путем умножения двух величин. Первая величина равна половине размаха пульсаций ошибки регулирования, определенного между двумя импульсами одной из синхронизирующих последовательностей как разница между значением ошибки регулирования в момент подключения к источнику питания положительной полярности и значением ошибки регулирования в момент подключения к источнику питания неположительной полярности. Вторая величина равна сумме двух слагаемых. Первое слагаемое является частным, в котором числитель равен единице, а знаменатель равен произведению: четырех, величины относительной длительности подключения электродвигателя к источнику питания положительной полярности, которая определяется как отношение длительности подключения в течение одного периода синхронизации электродвигателя к источнику питания положительной полярности к величине периода следования синхронизирующих импульсов, разности единицы и величины относительной длительности подключения электродвигателя к источнику питания положительной полярности. Второе слагаемое равно произведению постоянной времени интегратора, периода следования синхронизирующих импульсов и одной четвертой. Если относительная длительность подключения электродвигателя к источнику питания положительной полярности не равна нулю или единице и новая величина ширины зоны гистерезиса не превышает величины заданной ширины зоны гистерезиса, то новую величину ширины зоны гистерезиса используют для формирования верхнего и нижнего уровней ограничения тока. Новое текущее значение тока электродвигателя сравнивают с новым верхним и нижним уровнями ограничения тока и повторяют процесс описанным образом. В результате вычислений получают величину ширины зоны гистерезиса, которая позволят исключить статическую ошибку регулирования тока электродвигателей постоянного и переменного тока и обеспечить среднюю величину тока через нагрузку равной величине уставки тока при регулировании переменного и постоянного токов. 2 ил.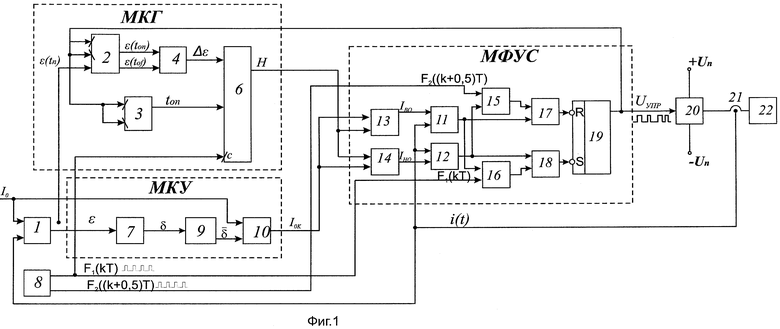
Способ импульсного регулирования электродвигателей постоянного и переменного тока, заключающийся в том, что формируют две последовательности синхронизирующих импульсов постоянной частоты, сдвинутые относительно друг друга на половину периода, формируют верхний и нижний уровни ограничения тока, при этом верхний уровень ограничения тока больше уровня тока уставки на величину заданной ширины зоны гистерезиса, а нижний уровень ограничения тока меньше уровня тока уставки на величину заданной ширины зоны гистерезиса, измеряют текущее значение тока электродвигателя, сравнивают его с верхним и нижним уровнями ограничения тока, и в случае превышения током электродвигателя верхнего уровня ограничения тока отключают электродвигатель от источника питания положительной полярности и подключают к источнику питания неположительной полярности, а при поступлении синхронизирующих импульсов первой последовательности подключают электродвигатель к источнику питания положительной полярности и отключают от источника питания неположительной полярности, а в случае уменьшения тока электродвигателя ниже нижнего уровня ограничения тока подключают электродвигатель к источнику питания положительной полярности и отключают от источника питания неположительной полярности, а при поступлении синхронизирующих импульсов второй последовательности отключают электродвигатель от источника питания положительной полярности и подключают к источнику питания неположительной полярности, при этом для исключения статической ошибки регулирования определяют текущую ошибку регулирования, интегрируют ее, и в случае, если величина интеграла ошибки регулирования превышает по модулю заданную ширину зоны гистерезиса, ограничивают полученное значение интеграла ошибки регулирования сверху или снизу величиной заданной ширины зоны гистерезиса, затем суммируют полученную величину с текущим уровнем тока уставки, в результате чего получают величину скорректированного уровня тока уставки, отличающийся тем, что для увеличения точности регулирования переменного тока производится перерасчет действующей ширины зоны гистерезиса, при этом новое значение ширины зоны гистерезиса вычисляется путем умножения двух величин: первая величина равна половине размаха пульсаций ошибки регулирования, определенного между двумя импульсами одной из синхронизирующих последовательностей как разница между значением ошибки регулирования в момент подключения к источнику питания положительной полярности и значением ошибки регулирования в момент подключения к источнику питания неположительной полярности, вторая величина равна сумме двух слагаемых, первое слагаемое которого является частным, в котором числитель равен единице, а знаменатель равен произведению четырех, величины относительной длительности подключения электродвигателя к источнику питания положительной полярности, которая определяется как отношение длительности подключения в течение одного периода синхронизации электродвигателя к источнику питания положительной полярности к величине периода следования синхронизирующих импульсов, разности единицы и величины относительной длительности подключения электродвигателя к источнику питания положительной полярности, второе слагаемое равно произведению постоянной времени интегратора, периода следования синхронизирующих импульсов и одной четвертой, если относительная длительность подключения электродвигателя к источнику питания положительной полярности не равна нулю или единице, и новая величина ширины зоны гистерезиса не превышает величины заданной ширины зоны гистерезиса, то новую величину ширины зоны гистерезиса используют для формирования верхнего и нижнего уровней ограничения тока, а затем новое текущее значение тока электродвигателя сравнивают с новым верхним и нижним уровнями ограничения тока и повторяют процесс описанным образом.
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2003 |
|
RU2256286C1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И ОДНОФАЗНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ, УПРАВЛЯЕМЫЙ ПО ЭТОМУ СПОСОБУ | 2005 |
|
RU2304839C2 |
| Намоточный барабан к станку для изготовления гибких валов | 1928 |
|
SU44901A1 |
| Устройство для регулирования тока тягового электродвигателя постоянного тока транспортного средства | 1987 |
|
SU1533904A1 |
| СПОСОБ ЗАЩИТЫ ДОКУМЕНТОВ ИЛИ ЦЕННЫХ ОБЪЕКТОВ | 2000 |
|
RU2167253C1 |
| US 5015939 A, 14.05.1991 | |||
| DE 3826892 A1, 14.05.1991. | |||

