Настоящее изобретение относится к противоюзовой системе для устранения буксования ведущих колес автомобилей, которая обозначена аббревиатурой «ASR» для антибуксовочной регулировки («Anti Slip Regulations» или «Anti Schlupf Regelung»).
Изобретение относится, в частности, к усовершенствованному противоюзовому устройству для устранения буксования ведущих колес и способу его применения.
Системы ASR предназначены, в частности, для того, чтобы улучшить подачу двигательной мощности во время движения автомобиля по любому типу площадок участков земли.
С помощью систем ASR осуществляют контроль двигательной мощности одного колеса в различных условиях управления транспортного средства, а именно при переднем ходе или при заднем ходе по проезжим дорогам или по проселочным дорогам, на которых находятся грязные, топкие участки, трава, колеи, трясины (руление осуществляют в условиях езды для автомашины вездехода), песок, снег или лед, и в условиях различных уровней наклона, и в условиях различных изменений поверхности площадки участка земли, на которой усовершенствуют автомобиль.
Улучшение двигательной мощности осуществляют с помощью этих систем в пределах, определенных на основании физических условий, в частности на основании предусмотренного сцепления колес с землей на неравномерной поверхности территории, на которой находится автомобиль или же в зависимости от зазора между автомобилем и землей.
Практически, системы ASR можно применять на любой автомашине с двумя ведущими колесами (4×2) или с четырьмя ведущими колесами (4×4) и с системой, предотвращающей блокировку колес или (ABS), который является аббревиатурой для антиблокировки тормозной системы («Anti lock Braking System»), они присоединяются все чаще в системы для контроля стабильности в динамическом состоянии, которые также обозначены аббревиатурой «ESP» для электронной программы устойчивости (Electronic Stability Program или Electronisches Stabibilitat Program), которые обеспечивают, кроме того, контроль скорости бокового заноса автомашины.
Все эти системы обеспечивают возможность определенным образом улучшить безопасность пассажиров и обеспечение двигательной мощности автомобилей.
Кроме того, устройства, предназначенные для устранения буксования, обеспечивают ценную помощь начинающим водителям, а также и опытным водителям.
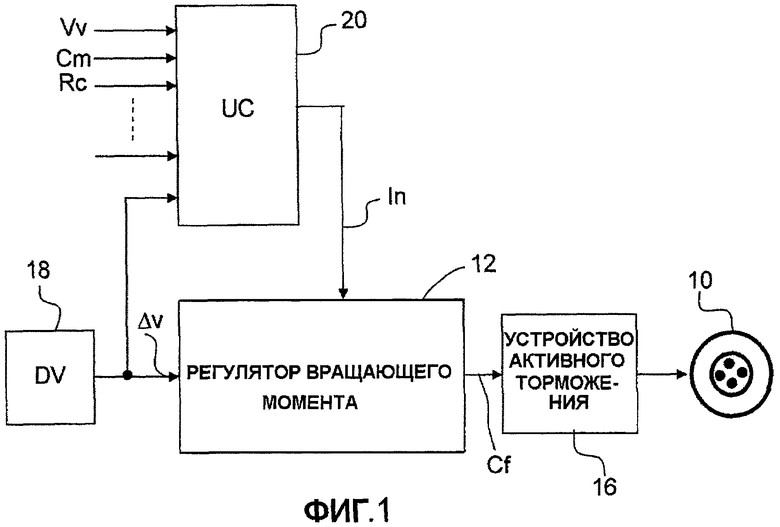
На фигуре 1 представлена основная блок-схема системы ASR 10 уровня техники.
Система ASR, изображенная на фигуре 1, содержит, в частности,
- регулятор вращающего момента 12, который подает данные для управления Cf на работающее устройство активного торможения 16, которое воздействует на ведущее колесо 10;
- управляющее устройство 20, обеспечивающее подачу на регулятор 12 вращающего момента данных об инициализации In регулирования; и
- один датчик DV 18, который подает на регулятор 12 вращающего момента информационные данные об отклонениях переменных параметров Δv управления автомобиля.
Устройство управления 20 получает различные виды информации, которые относятся к автомашине в заданный момент, такие как скорость автомашины Vv, сцепление с почвой Rc, вращающий момент Cm, и направляет информацию об инициализации In режима регулирования на регулятор вращающего момента 12.
Согласно обычному варианту, регулятор 12 вращающего момента содержит обычно пропорциональный регулятор, который направляет данные для управления на устройство активного торможения 16, которые пропорциональны отклонениям переменных величин, и интегратор регулировки, который получает информацию о включении в работу устройства управления 20. Пропорциональный регулятор и интегратор регулировки изготовлены с использованием математических элементов, которые вводят соответственно алгоритмы обработки для каждого из ведущих колес 10 автомобиля.
Кроме того, автомобиль содержит датчики (не изображены на фигуре 1), которые подают информацию на блок управления 20.
В настоящее время, такие системы ASR, выполненные согласно известному уровню техники, устанавливают на автомобили вездеходы (4×4), но они характеризуются дефектами и недостатками. Для того чтобы точнее определить эти недостатки, мы рассмотрим различные условия изменения автомобиля во время его езды в условиях площадки участка земля, которые мы будем называть «условия эксплуатации».
Затем мы используем в нижеследующем описании термин «Отрыв от земли» для того, чтобы определить перевод автомобиля из положения, в котором он находился на стоянке (скорость равна нулю), в положении запуска автомобиля в движение (скорость не равна нулю).
Можно усовершенствовать автомобиль в условиях двух основных категорий площадок участков земли:
- площадки участков земли со слабым низким сцеплением, например, такие площадки, которые содержат песок, гравий, снег, лед;
- площадки участков земли с сильным сцеплением, такие как трассы или дороги из мокрого асфальта или сухого асфальта.
Здесь ниже мы рассмотрим два следующих основных варианта эксплуатации в бытовых условиях автомобиля A и B:
A - первый вариант условий эксплуатации в бытовых условиях на площадках участков земли, предназначенных для усовершенствования автомобиля в условиях маневрирования на площадках участка земли со слабым сцеплением или с сильным сцеплением с почвой;
- отрыв автомобиля от земли в горизонтальном положении в условиях слабого, среднего и сильного гомогенного или асимметричного сцепления с поверхностью земли;
- отрыв автомобиля от земли в условиях наклона поверхности земли и/или в условиях с различными изменениями поверхности площадки участка земли и в условиях слабого, среднего и сильного сцепления с землей;
- отрыв автомобиля от земли в условиях наклона поверхности или в условиях с различными изменениями поверхности площадки участка земли и в условиях слабого, среднего и сильного гомогенного или асимметричного сцепления с землей, в этом случае колеса установлены с развалом.
В этом первом варианте A условий эксплуатации системы ASR, выполненные согласно предшествующему уровню техники, осуществляют сразу контроль двигателя и тормозов для того, чтобы обеспечить возможность переключить два колеса (4×2) или четыре колеса (4×4) автомобиля в режим, установленный в постоянной инструкции независимо от условий сцепления с землей, наклона поверхности земли и/или различных изменений поверхности площадки участка земли.
Воздействие на автомобиль, которое ощущает водитель:
- в условиях слабого сцепления с почвой отмечают отсутствие двигательной мощности и трудное управление автомашиной;
- в условиях сильного сцепления с почвой отмечают отключение двигателя на продолжительный период, который ухудшает скорость отрыва от земли.
B - второй вариант условий эксплуатации на участках, предназначенных для усовершенствования автомобиля при маневрировании в условиях слабого сцепления с почвой:
- перемещение автомобиля во время маневрирования в условиях площадок, участков земли, в условиях наклона земли и/или в условиях различных изменений местности и в условиях слабого, среднего гомогенного или асимметричного сцепления с почвой.
При работе на автомашине, в данном случае, в этом втором варианте B условий эксплуатации системы ASR, выполненные согласно предшествующему уровню техники, осуществляют регулировку вращающего момента, который передается на два (4×2) или на четыре колеса (4×4), в пределах небольшой величины, установленной в норме, которую можно увеличить в случае, когда определили, например, большую толщину слоя снега, который обеспечивает таким образом точность определения.
Воздействие на автомобиль, которое ощущает водитель, следующее:
- в случае небольшого сцепления с землей создается отсутствие двигательной мощности и чувство неудовлетворенности для водителя автомобиля;
- при езде по слякоти и грязи в зависимости от степени влажности структура покрышек шин может заполняться грязью и не передавать больше существующее в данный момент сцепление.
Одной из главных целей изобретения является обеспечение наилучшего контроля автомобиля с помощью постоянного исследования двигательной мощности на любом типе почвы или на любых типах участков земли.
Другой целью изобретения является создание условий для обеспечения более надежного и квалифицированного вождения автомобиля в более удобных условиях, в частности, для малоопытных водителей в условиях вождения во время маневрирования в условиях, предусмотренных для автомашин вездеходов.
Для достижения этой цели и для того, чтобы устранить недостатки систем известного уровня техники, согласно изобретению предлагают устройство против скольжения ведущих колес транспортного средства, в частности автомобиля, который содержит:
- устройство активного торможения ведущих колес;
- регулятор вращающего момента, который подает сигнал управления (Cf) на устройство для активного торможения в зависимости от информации об отклонениях от диапазонов регулирования (Δv) относительно инструкции по установленному регулированию;
- блок управления, который подает на регулятор вращающего момента информацию об инициализации (In) регулирования;
- средства, предназначенные для того, чтобы информировать об инициализации (In) регулирования на основании параметров изменения транспортного средства вездехода таких параметров, как сцепление с землей и скорость вращения ведущих колес, наклон и/или различные изменения площадки участка земли;
- средства, предназначенные для того, чтобы передавать информацию об инициализации (In) регулирования на основании информационных данных о действиях водителя на один элемент или на несколько элементов систем управления транспортного средства;
- отличающееся тем, что регулятор вращающего момента содержит средства для выбора, для торможения первого ведущего колеса (колесо, которое названо «медленноскоростное») во время фазы запуск в движение транспортного средства для того, чтобы обеспечить двигательную мощность то, по крайней мере, не тормозят одно ведущее колесо, которое участвует в приводе в движение транспортного средства для того, чтобы увеличить его сцепление с землей.
Согласно одному варианту выполнения изобретения, первое ведущее колесо, которое заторможено, и другое ведущее колесо, которое не заторможено, устанавливают соответственно на свободные концы одной и той же оси.
Согласно другому варианту выполнения, первое ведущее колесо, которое заторможено, и другое ведущее колесо, которое не заторможено, используют в качестве направляющих колес автомашины.
Согласно другому варианту выполнения изобретения, регулятор вращающего момента содержит средства, предназначенные для того, чтобы выбрать наиболее возможное и наилучшее увеличение скорости (оптимизированное увеличение скорости) в зависимости от параметров изменения технических характеристик автомобиля и в зависимости от информационных сведений о работе водителя на одном элементе или на нескольких элементах приборов управления привода автомобиля.
Изобретение относится к способу, предназначенному для использования вышеописанного устройства.
Способ характеризуются тем, что включает следующие этапы:
- подача с помощью регулятора вращающего момента сигнала управления от механизма, распределяющего вращающий момент в зависимости от информационных данных в диапазонах регулирования автомобиля относительно инструкции по регулированию скорости колес;
- подача с помощью блока управления информации об инициализации регулирования на основании параметров изменения технических данных транспортного средства на поверхности земли таких данных, как сцепление с землей и скорость колес, наклон и/или различные изменения поверхности площадки участка земли.
Согласно рациональному варианту выполнения изобретения, кроме того, этап подачи информации об инициализации регулирования выполняют на основании информационных данных о воздействии водителя на элементы приводов транспортного средства, свидетельствующие о желании водителя.
Согласно одному варианту выполнения изобретения, способ, выполняемый согласно изобретению, содержит, по крайней мере,
- одну фазу (Фаза 0) анализа/определения сцепления с поверхностью почвы и скорости ведущих колес, наклона поверхности и/или различных изменений поверхности площадки участка земли и решения водителя;
- одну фазу (Фаза 1) запуска в работу (запуск в движение) транспортного средства, которое заключается в том, что выбирают первое ведущее колесо для торможения или медленно скоростное колесо для того, чтобы обеспечить мощность двигателя привода, по крайней мере, в этом случае, не тормозят другое ведущее колесо, которое участвует в создании тягового усилия, для того, чтобы обеспечить удаление посторонних предметов, которые уменьшают сцепление упомянутого колеса с поверхность земли, и использовать скорость вращение этого колеса для того, чтобы вырыть в земле выемку, и создать вновь сцепление с землей, и, следовательно, двигательную мощность.
- одну фазу усовершенствования (Фаза 3), которая включает:
- уменьшение инструкции по регулированию скорости, высокой при начале езды при скольжении колеса, для того, чтобы найти наилучшее возможное ускорение;
- определение заданного ускорения транспортного средства, которое предложил водитель, и регулировку вблизи этой точки ускорения.
Термин скольжения (или степень скольжения) обычно обозначает степень буксования колеса в зависимости от скорости транспортного средства.
В случае варианта выполнения способа, согласно которому рассматриваемые упомянутые ведущие колеса являются направляющими колесами, которые установлены на одной и той же оси, в случае когда нет наклона и/или различных изменений поверхности земли и когда колеса установлены под прямым углом или образуют угол развала а, который меньше установленной величины ab (a≤b), при этом, колесо которое вращается с самой медленной скоростью определяют как самое медленноскоростное колесо (R10).
Согласно другому варианту выполнения, согласно которому упомянутые ведущие колеса являются направляющими колесами, которые установлены на одной и той же оси при отсутствии наклона и/или различных изменений поверхности земли в случае, когда колеса устанавливают с развалом из положения с некоторым углом развала (a>ab), то в этом случае выбирают наружное колесо (Rext) в качестве медленноскоростного колеса для того, чтобы больше не создавать недостаточную управляемость при повороте, а в этом случае наружное колесо используют в качестве колеса, которое удалено на самое большое расстояние от теоретической точки поворота транспортного средства.
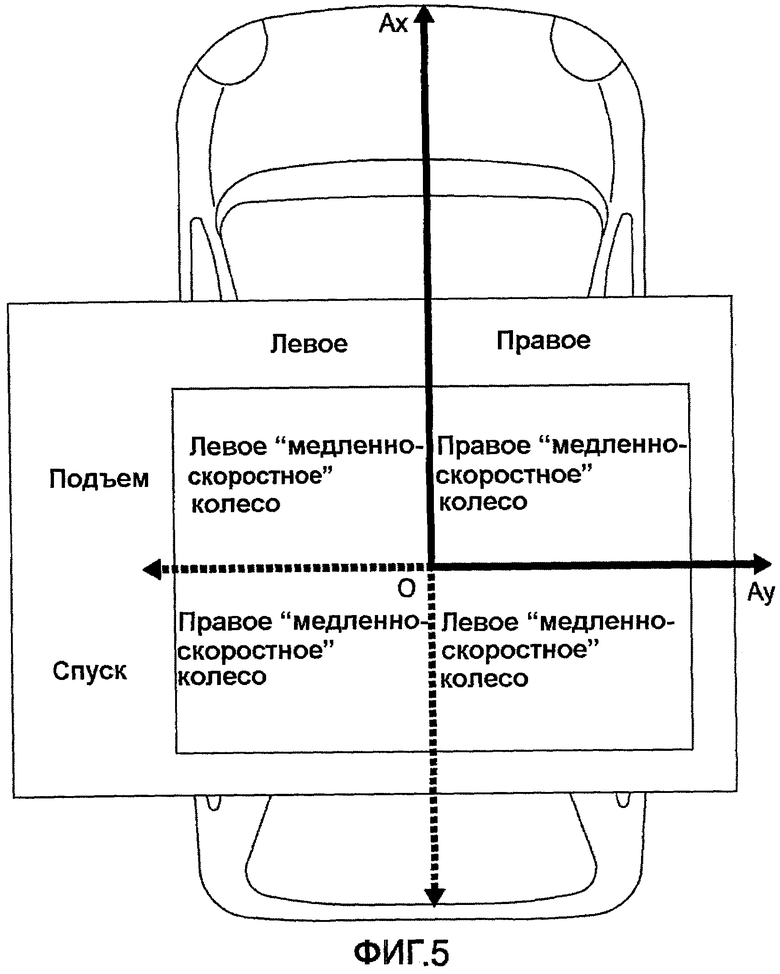
Согласно другому варианту выполнения, вышеупомянутые ведущие колеса являются направляющими колесами, которые установлены на одной и той же оси в условиях наклона и/или в условиях различных изменений местности земли, АХ, который обозначает ускорение в продольном направлении вдоль продольной оси X транспортного средства, и AY, который обозначает ускорение вдоль оси Y, которая перпендикулярна оси X, AX, AY. Причем, в этом случае, это ускорение может иметь положительные или отрицательные величины, способ содержит один этап вычисления знака произведения AX×AY и определение медленноскоростного колеса;
- в случае, если произведение AX×AY положительное, то выбирают правое колесо Rdr в качестве медленноскоростного колеса (Rlente=Rdr);
- в случае, если произведение AX×AY отрицательное, то левое колесо Rgr выбирают в качестве медленноскоростного колеса (Rlente=Rdr), при этом заменять колесо можно только в случае, если:
- изменяется в обратном направлении знак произведения (AX×AY),
- не обеспечен критерий устойчивости колеса.
Таким образом, вследствие этого возникает необходимость поменять, переставить медленноскоростное колесо и быстроскоростное.
Выполненное согласно изобретению устройство для регулирования тягового усилия предназначено для того, чтобы обеспечить новые возможности информационной системы по сравнению с противоюзовым устройством для устранения буксования колес, которое для устранения буксования колес выполнено согласно варианту предшествующего уровня техники и, в частности, для
- применения законов управления, специально разработанных для того, чтобы регулировать условия эксплуатации автомобиля согласно четырем фазам: Фаза 0, Фаза 1, Фаза 2 и Фаза 3, в этом варианте Фаза 2 определена как промежуточная переходная фаза;
- применения законов управления, разработанных для того, чтобы регулировать степень буксования в соответствии с условиями, предложенными водителем.
Итак, изобретение будет лучше понято из примеров вариантов выполнения устройства согласно изобретению со ссылками на прилагаемые чертежи на которых:
Фигура 1, которая была уже описана, изображает основную блок-схему системы ASR, выполненную согласно известному уровню техники;
Фигура 2 изображает блок-схему различных вариантов выполнения;
Фигура 3 изображает блок-схему фаз способа использования устройства, выполненного согласно изобретению;
Фигура 4 изображает изменение в течение определенного времени скоростей правых и левых колес, а также скоростей транспортного средства в зависимости от угла руля, который приводит в движение водитель;
Фигура 5 изображает таблицу выбора медленноскоростного колеса с помощью способа, предложенного согласно изобретению в случае наклона и/или различных изменений поверхности земли;
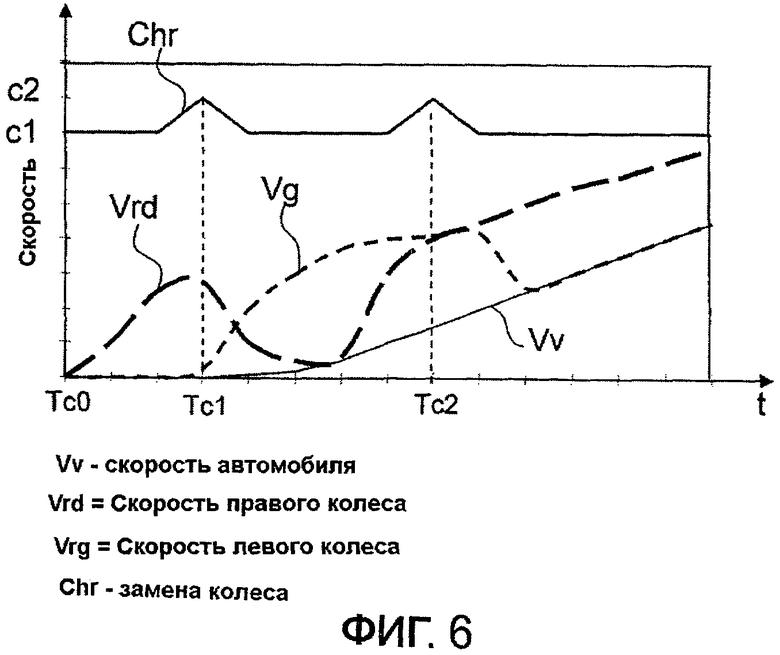
Фигура 6 изображает пример изменения в период времени изменения скоростей колес, а также скорость автомобиля при замене колеса; и
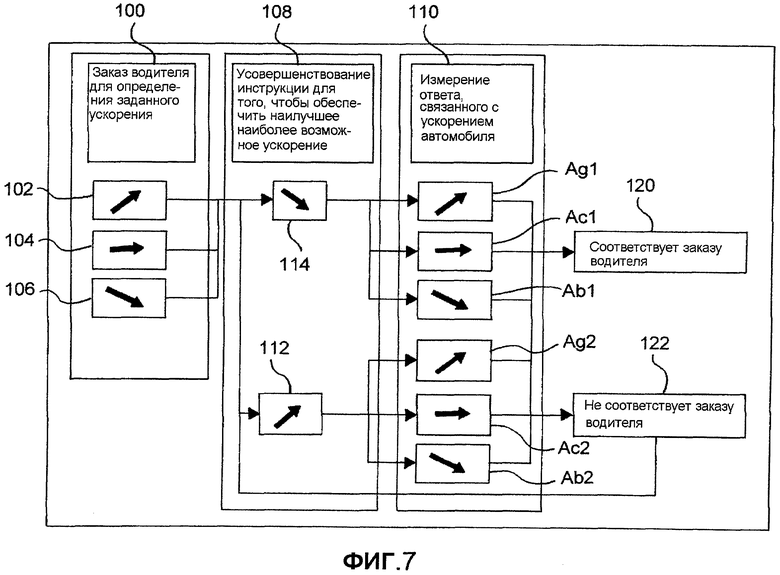
Фигура 7 изображает блок-схему, на которой представлены различные этапы Фазы 3 способа, выполняемого согласно изобретению.
В нижеследующем описании описан вариант выполнения транспортного средства с двумя ведущими колесами (4×2).
Однако область применения изобретения не ограничивается только автомобилями с двумя ведущими колесами (4×2), его можно также использовать для автомобилей с четырьмя ведущими колесам (4×4).
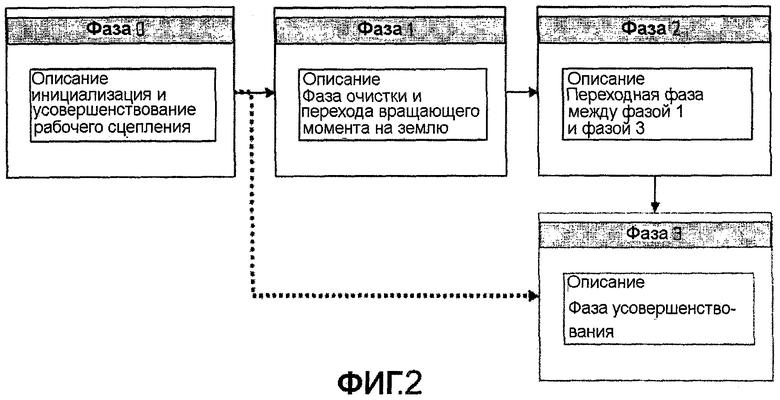
На фигуре 2 изображены блок-схема трех фаз: Фаза 0, Фаза 1, Фаза 2 и Фаза 3 новых функциональных способностей способа, осуществляемого согласно изобретению и взаимная связь между каждой фазой.
Фаза 0 является такой фазой, во время которой осуществляют анализ/подсчет скорости и сцепления на земле колес с поверхностью земли, наклона и/или различных изменений поверхности площадки участка земли и желания водителя.
Фаза 1 является фазой запуска в рабочее состояние автомобиля (или фазой запуска в движение). Во время этой фазы осуществляют выбор колеса, которое выбирают для того, чтобы это колесо затормозить и для того, чтобы обеспечить двигательную мощность, используя для этого максимально сцепление с землей, которое обеспечено, и перевести вращающий момент на землю с помощью этого колеса (мы выберем наиболее возможную медленную скорость колеса, без скольжения, то есть, такую, чтобы медленноскоростное колесо вращалось со скоростью транспортного средства), а в этот момент другое колесо не тормозят.
В этой Фазе 1 наметили выполнить следующие главные операции:
- удалить грязь, которая находится на шине быстроскоростного колеса, для того, чтобы обеспечить для шины возможность восстановить сцепление с землей;
- применить скорость вращения этого колеса для того, чтобы прорыть в земле углубление и обеспечить сцепление с землей; и
- перевести вращающий момента посредством сцепления с медленноскоростным колесом.
Фаза 2 является переходной фазой между Фазой 1 и Фазой 3.
Фаза 3 является фазой прогрессии развития, которая включает следующие операции:
- уменьшение скорости, установленной в соответствии с инструкцией по эксплуатации, величина которой увеличилась вначале движения «на участке скольжения», для того, чтобы определить наилучшее возможное ускорение;
- и в момент, когда это будет достигнуто, определить величину, которую хотят достигнуть, которую определяет водитель; и
- регулирование скорости около этой точки.
В случае, если водитель увеличивает скорость, то увеличивают скорость, установленную в инструкции по эксплуатации, для того, чтобы определить наилучшее ускорение.
Если водитель отпускает педаль ускорителя и остается в этот момент на режиме работы ASR, то уменьшается скорость, которая установлена по инструкции, для того, чтобы начать выбирать другое наилучшее ускорение.
В идеальном случае, при одном и том же одинаковом сцеплении с землей колес и в случае, когда водитель обеспечивает достижение скорости, которую он определил, согласно способу, предложенному в изобретении, осуществляют переход непосредственно сразу от фазы 0 в фазу 3 развития транспортного средства.
Затем мы опишем осуществление способа, предложенного в изобретении в зависимости от различных условий эксплуатации транспортного средства.
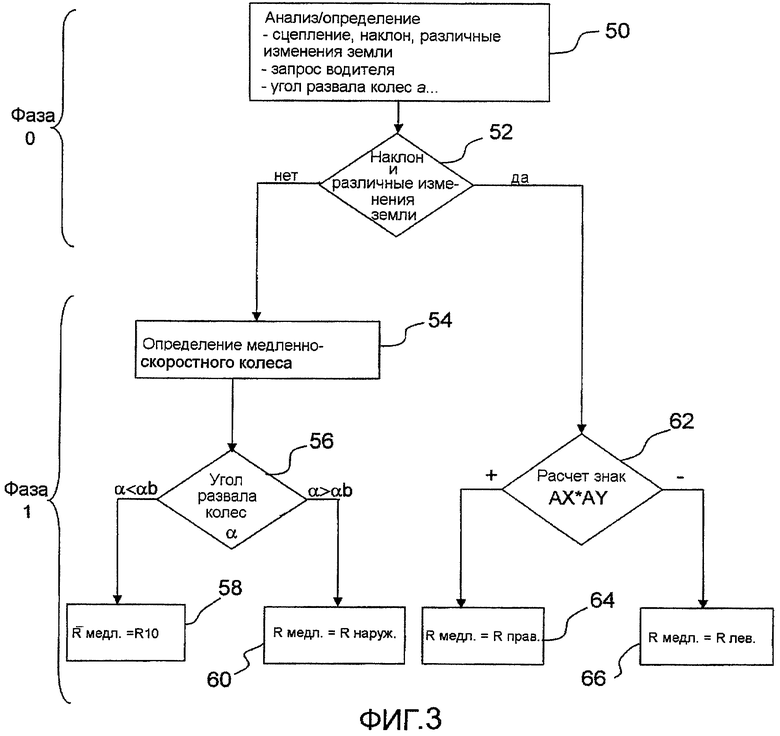
На фигуре 3 изображена блок-схема различных фаз способа, предложенного согласно изобретению.
В Фазе 0 способ включает этап анализа/определения оценки 50 условий движения по земле транспортного средства, после которого выполняют этап 52, во время которого определяют содержит или не содержит площадка участка земли наклон и/или различные изменения поверхности земли.
Согласно известному способу, для того, чтобы определить обстановку и наличие наклона и/или различных изменений поверхности площадки участка земли, на котором осуществляют усовершенствование транспортного средства, используют датчики ускорения, которые регенерируют продольные поперечные ускорения и поворот по курсу транспортного средства, и другие датчики угла наклона и/или другие изменения площадки участка земли, на котором усовершенствуют конструкцию транспортного средства.
Также, применяя известный способ, используют датчики, предназначенные для измерения скорости колес, которые присоединены в систему колес, и также применяют согласно известному способу, датчики, предназначенные для измерения скорости колес, которые присоединены в систему колес, которые обеспечивают возможность определить колесо с самой маленькой скоростью.
Во время Фазы 1 с помощью данного способа определяют медленноскоростное колесо согласно результатам информации о присутствии сигнала «oui» «да» или «nоn» «нет» наклона и/или различных изменений поверхности площадки участка земли.
В этом случае выделяют два варианта фигур A и B.
В случае A, если показан результат «нет» (отсутствие наклона и/или различных изменений поверхности площадки участка земли), то в этом случае необходимо использовать первый вариант для определения медленноскоростного колеса (этап 54).
В этом случае способ определения 54 содержит один этап определения угла развала колес а (этап 56) с двумя условиями 1 и 2:
1 - в случае когда колеса установлены под прямым углом или угол развала «а» колес меньше предварительно определенной величина ab (a≤b), то определяют колесо с самой небольшой скоростью (или самое медленноскоростное колесо), которое определили во время фазы 0 анализа/подсчета (этап 50) как самое медленноскоростное колесо R10 (Rlente=R10) (этап 58), во время Фазы 1 на базе двух оснований:
- это колесо может передать на землю вращающий момент;
- быстроскоростное колесо имеет большую возможность прорыть канаву в земле и, следовательно, создать дополнительное усилие вращающего момента для того, которое было образовано после прорытия канавы в земле;
2 - в случае когда колеса установили с развалом, начиная от определенного угла развала (a>b), то выбирают наружное колесо Rext (Rlent=Rext) 60 в качестве медленноскоростного колеса для того, чтобы больше не создавать субвираж.
В качестве наружного колеса выбирают колесо, которое находится на самом большом расстоянии от теоретической точки поворота транспортного средства.
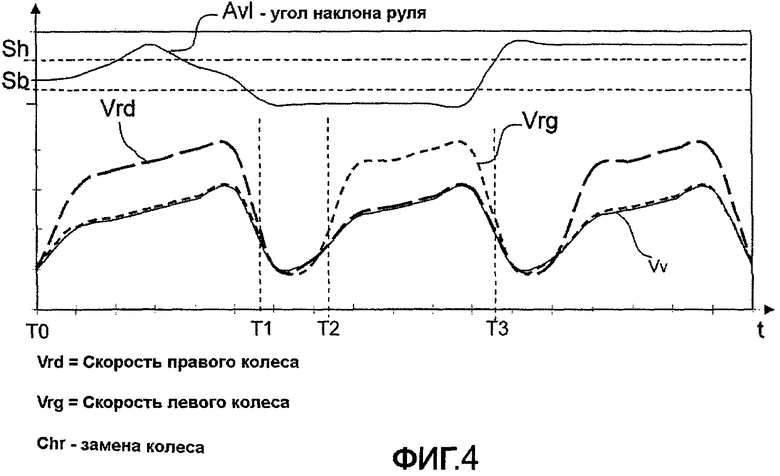
На фигуре 4 изобразили изменение в определенной период времени скоростей правых колес Vrd и левых колес Vrg, а также скорости транспортного средства Vv в зависимости от угла руля Avl (угол поворота), который приводит в движение водитель автомобиля.
В момент, когда руль повернут налево (порог Sh предварительно определенной величины ab, который прошли при движении сверху), правое колесо Vrd вращается с большей скоростью, чем левое колесо Vrg, которое вращается медленнее (период T0-T1). После этого, после того как руль повернут слева направо (через порог Sb, ab проходят снизу), левое колесо Vrg вращается быстрее, чем правое колесо Vrd (период T2-T3), проходя через переходной период времени (T1-T2), или же оба колеса вращаются почти на одной и той же скорости. Скорость автомобиля временно уменьшается во время этого переходного периода (T1-T2).
В случае В, который соответствует выбору медленноскоростного колеса в условия местности, содержащей наклон и/или различные изменения поверхности площадки земельного участка:
В случае, если во время этапа 52 получили «OUI» «ДА» (см. фигуру 3), то способ содержит этап вычисления знака 62 произведения AX×AY и определения медленноскоростного колеса:
- когда AX обозначает продольное ускорение вдоль продольной оси X транспортного средства, a AY обозначает ускорение вдоль оси Y, которая перпендикулярна оси X, в этом случае величины ускорения AX и AY могут иметь соответственно положительные или отрицательные значения;
- если результат произведения AX х AY после этого положительный, то выбирают правое колесо Rdr в качестве медленноскоростного колеса (Rlente=Rdr) (этап 64);
- если результат произведения AX×AY отрицательный, то выбирают левое колесо Rgr в качестве медленноскоростного колеса (Rlente=Rgr) (этап 66).
На фигуре 5 изображена таблица для выбора медленноскоростного колеса с помощью способа, предложенного согласно изобретению, в случае варианта условий, содержащих наклон и/или различные изменения площадки участка земли.
При усовершенствовании в условиях эксплуатации на площадке участка земли знак наклонов AX и различных изменений площадки участка земли АY может изменяться. Изменение знака может создать необходимость изменить выбор медленноскоростного колеса. В этом случае выбор может быть осуществлен на основании необходимости обеспечить приоритетные характеристики для эксплуатации.
Вследствие увеличивающегося количества льготных прав можно заменить колесо только в случае, если:
1) знак умножения (AX×AY) изменяется в обратном направлении;
2) критерий стабильности колеса не выполнен.
Критерий стабильности колес определяют в период времени Т следующим образом:
a) в случае, если величина Скорости медленноскоростного колеса равняется величине Скорости быстроскоростного колеса, а почва твердая, тогда в этом случае отмечают, что необходимо разрешить изменить правила выбора медленноскоростного колеса;
b) в случае, если величина Скорости медленноскоростного колеса меньше величины Скорости быстроскоростного колеса, а почва рыхлая, поэтому нельзя предоставить разрешение заменить и поменять колеса;
c) в случае, если Скорость транспортного средства равна нулю «0», и T1=T, м/с, и медленноскоростное колесо стабильное, тогда необходимо заменить колесо.
Можно также определить критерий стабильности колеса следующим образом:
d) в случае, если скорость медленноскоростного колеса равна скорости быстроскоростного колеса в течение некоторого периода времени в зависимости от наклона, то тогда в этом случае отмечают, что поверхность земли обеспечивает для пары пройти и, существует необходимость заменить медленноскоростное колесо,
e) в случае, если обе скорости колес медленноскоросного колеса и быстроскоростного колеса находятся в пределах, установленных в инструкциях, определяющих скорость во время некоторого периода времени, которое зависит от наклона, тогда из этого условия следует, что поверхность земли не обеспечивает сцепление и создает необходимость заменить колесо,
f) в случае, если скорость транспортного средства равна нулю 0 в течение периода времени, который превышает величину, предварительно установленную в секундах, то необходимо заменить колесо.
На фигуре 6 изображен пример усовершенствования изменения скоростей колес, а также скорости транспортного средства в момент замены колеса (Фаза 1).
В интервале между временем начала Tc0 и следующим временем Tc1 скорость правого колеса Vrd увеличивается, скорость левого колеса Vrg остается стабильной и меньше скорости правого колеса, а скорость транспортного средства нулевая.
Во время Tc1 замена колеса разрешена, она изображена на фигуре 6 с помощью прохождения индикатора Chr от c1 до c2, затем его возвращения в c1. Скорость правого колеса Vrd уменьшается в то время, как скорость Vrg левого колеса увеличивается. Начинается увеличение скорости автомобиля Vv.
В течение следующего периода времени Tc2 скорости колес становятся одинаковыми, новая замена производится и изображена с помощью нового прохода индикатора Chr из c1 в c2, а затем возвращение в c1. Скорость автомобиля Vv продолжает увеличиваться в направлении к величине, которую желает установить водитель.
На фигуре 7 изображена блок-схема, на которой представлены различные этапы фазы 3 способа, выполняемого согласно изобретению.
В одном этапе 100, согласно способу, учитывают желание водителя 100, определяя ускорение, которое желает установить водитель и во время этого этапа:
- водитель увеличивает скорость 102, выдерживает ускорение 104 или уменьшает скорость 106.
Во время этапа 108, в процессе выполнения способа, совершенствуют инструкцию о скорости для того, чтобы обеспечить наилучшую возможную скорость, либо увеличение пределов инструкции 112, либо уменьшение пределов инструкции 114.
Под наилучшим возможным ускорением понимают ускорение, которое было улучшено для того, чтобы найти среднюю величину между той величиной, которую желает установить водитель, и той величиной, которая обеспечивается в зависимости от состояния автомобиля.
Во время этапа 110 во время процесса измеряют результаты информации об ускорении автомобиля, в зависимости от того, что задано в инструкции - уменьшение 114 или увеличение 112, а после измерения принимают решение либо увеличить ускорение Agl или Ag2, либо сохранить постоянное ускорение Acl или Ac2, или уменьшают скорость Ab1 и Ab2.
Во время этапа 120 измерение характеристик, полученных в результате ускорения транспортного средства, соответствует величинам, которые предлагает установить водитель.
Во время этапа 122, если результаты измерения ускорения транспортного средства не соответствуют величинам, которые предлагал установить водитель, то согласно способу изменяют величину, установленную по инструкции 112, 114, для того, чтобы получить сведения об ускорении, которое планировал установить водитель.
Сведения, полученные на автомашине, которая снабжена устройством, которое выполнено согласно изобретению, в разных условиях эксплуатации, приведены здесь ниже:
1. В положении, в момент начала движения с места стоянки:
- на участке земли со слабым сцеплением с почвой постоянный поиск мощности двигателя моторности (Фаза 1). Постоянный контроль сохраняется благодаря правилам приема решения для выбора ведущего колеса для торможения в зависимости от изменяемого угла развала колес, угла наклона земли и/или различных изменений поверхности земли;
- при высокой величине сцепления, и еще, дополнительно, отключение двигателя.
2. Во время последовательного перемещения из одного рабочего места на другое:
В условиях слабого сцепления с землей, высокая мощность двигателя и высококачественная система управления. Кроме этого, фрюстрация.
Езда по грязи, постоянный поиск мощности двигателя.
Следует отметить, что изобретение было описано, в основном, для варианта устройства, которое осуществляет управление торможения ведущих колес (ретранслятор торможения), который управляется таким образом, чтобы распределить вращающий момент на ведущие колеса автомашины, оно также включено в область применения настоящего изобретения.
Изобретение относится к области автомобильного транспорта и направлено на усовершенствование устройства для устранения буксования ведущих колес. Устройство содержит средство для активного торможения вращающего момента, который передается на ведущие колеса; регулятор вращающего момента, который передает сигнал управления на средство активного торможения в зависимости от сведений об ошибках регулирования относительно инструкции, в которой определены и установлены технические условия регулирования. Устройство также содержит блок управления, который передает на регулятор информацию об инициализации режима регулирования. Блок управления содержит средства, предназначенные для того, чтобы подавать информацию об инициализации режима регулирования на основании изменения параметров автомобиля вездехода таких параметров, как сцепление с землей, скорость ведущих колес, наклон и/или различные изменения поверхности земли. Технический результат заключается в повышении безопасности и облегчении условий вождения автомобиля. 2 н. и 9 з.п. ф-лы, 7 ил.
1. Противоюзовое устройство для устранения буксования ведущих колес (10) транспортного средства, в частности автомобиля, содержит:
- устройство (16) для активного торможения ведущих колес (10);
- регулятор (12) вращающего момента, который подает сигнал управления (Cf) на устройство (16) для активного торможения в зависимости от информации об ошибках регулирования (Δv) по сравнению с заданными значениями, которые определены техническими условиями регулирования;
- устройство управления (20), подающее информацию об инициализации (In) регулирования; средства связи, предназначенные для подачи информации об инициализации (In) режима регулирования, вследствие изменения параметров автомобиля в период его перемещения в условиях местности для вездехода, таких параметров, как сцепление с землей и скорость ведущих колес, наклон и/или уклон поверхности земли; средства, предназначенные для того, чтобы передавать информацию об инициализации регулирования (In), o включении в режим регулирования на основании данных, информирующих несколько элементов систем управления автомобилем, отличающееся тем, что регулятор вращающего момента (12) содержит средства, предназначенные для выбора первого ведущего колеса для торможения во время этапа включения в работу и запуска автомобиля в движение для того, чтобы обеспечить подвижность, то для этого, по крайней мере, не тормозят другое ведущее колесо, которое участвует в транспортировке автомобиля для того, чтобы увеличить его сцепление с поверхностью земли.
2. Противоюзовое устройство по п.1, отличающееся тем, что первое ведущее колесо, которое заторможено, и другое ведущее колесо, которое не заторможено, установлены соответственно на свободных концах одной и той же оси.
3. Противоюзовое устройство по п.1, отличающееся тем, что первое ведущее колесо, которое заторможено, и другое ведущее колесо, которое не заторможено, выполнены в виде направляющих колес.
4. Противоюзовое устройство по пп.1-3, отличающееся тем, что регулятор (12) вращающего момента содержит средства для обеспечения наилучшего наиболее возможного ускорения в зависимости от параметров изменения транспортного средства и в зависимости от сведений, информирующих о работе водителя, который использовал для работы один элемент или несколько элементов систем управления автомобиля.
5. Способ для использования противоюзового устройства для устранения буксования, выполненного согласно пп.1-4, отличающийся тем, что способ содержит следующие этапы:
- с помощью регулятора вращающего момента подают сигнал управления (Cf) на устройство, которое распределяет колеса в зависимости от информации об ошибках регулирования (Av) по сравнению с заданными значениями, которыми определены и установлены технические условия регулирования скорости колес;
- с помощью устройства управления (20) информируют об инициализации (In) процесса регулирования на основе параметров изменения транспортного средства при движении по поверхности земли таких параметров, как сцепление с землей и скорость вращения колес, наклон или различные изменения площадки участка земли, этап информирования об инициализации (In) регулирования выполняется на основании информации, сообщающей о действии водителя на элементы системы управления автомобиля.
6. Способ по п.5, отличающийся тем, что он включает, по крайней мере:
- одну операцию анализа/подсчета (50) сцепления с поверхностью земли и скорости колес, наклона и/или различных изменений поверхности земли на площадке участка земли и действий по желанию водителя (Фаза 0);
- одну фазу запуска транспортного средства (Фаза 1), которая заключается в том, что выбирают ведущее колесо, которое вращается с небольшой скоростью (58, 60, 64, 66) для того, чтобы обеспечить двигательную мощность в том случае, когда не тормозят, по крайней мере, одно другое ведущее колесо, которое участвует в перемещении транспортного средства, для того, чтобы обеспечить удаление посторонних предметов, которые уменьшают плотное прилегание вышеупомянутого колеса для того, чтобы образовать полость в земле и обеспечить сцепление машины с грунтом;
- фазу продвижения (Фаза 3), которая включает:
уменьшение установленной величины при регулировании скорости, которая была высокой в начале движения, при скольжении колеса, для того, чтобы определить наилучшее возможное ускорение; определение специального ускорения автомобиля по заказу водителя и регулирование вблизи этой точки ускорения.
7. Способ по одному из пп.5 или 6, отличающийся тем, что в случае, если поверхность земли не имеет наклона и/или уклона, или других изменений поверхности земли и в случае, если колеса установлены с прямым углом развала или образуют угол развала (а), который меньше предварительно установленной величины, то определяют колесо, которое вращается с самой медленной скоростью вращения (R10) (58), т.е. как медленноскоростное колесо.
8. Способ по одному из пп.5 или 6, отличающийся тем, что в случае, если нет наклона и/или других различных изменений местности, в случае, если колеса установлены под углом развала, начиная от некоторого угла развала (а), то определяют наружное колесо (Rext) (60) как колесо, которое вращается с самой медленной скоростью для того, чтобы не создавать условия для недостаточной поворачиваемости, в этом случае наружное колесо является таким колесом, которое удалено на наибольшее расстояние от точки поворота транспортного средства, которая определена с помощью теоретического расчета.
9. Способ по любому из пп.5 или 6, отличающийся тем, что в случае, если на пути автомобиля находится наклон и/или различные другие изменения поверхности площадки участка земли, то термин АХ, который обозначает также продольное ускорение вдоль продольной оси X автомобиля и термин AY, который обозначает ускорение вдоль оси Y, которая перпендикулярна оси X, которая может иметь положительные величины или отрицательные величины, то способ включает операцию вычисления (62) знака произведения AX×AY и определение медленноскоростного колеса:
- в случае, если произведение AX×AY положительное, то выбирают правое колесо (Rdr) в качестве медленноскоростного колеса (Rlente=Rdr) (64),
- в случае, если произведение AX×AY отрицательное, то выбирают левое колесо (Rgr) в качестве медленноскоростного колеса (Rlente=Rgr) (66), при этом замена колеса возможна только в случае, если знак произведения (АХ×АY) будет изменен, а критерий устойчивости колеса не выполнен.
10. Способ по п.9, отличающийся тем, что критерий устойчивости колес определяют на базе времени Т следующим образом:
a) если скорость медленноскоростного колеса равна скорости быстроскоростного колеса, а почва твердая, то вследствие этого разрешено изменить выбор медленноскоростного колеса,
b) если скорость медленноскоростного колеса меньше скорости быстроскоростного колеса, то почва рыхлая и вследствие этого нельзя разрешить изменение выбора колеса,
c) если скорость автомобиля равна нулю «0», и если Т1=Т в м/с, а медленноскоростное колесо работает стабильно, то разрешена замена колеса.
11. Способ по п.9, отличающийся тем, что критерий стабилизации работы колеса определяют следующим образом:
d) если скорость медленноскоростного колеса равна скорости быстроскоростного колеса в течение некоторого периода времени в зависимости от наклона поверхности земли, то тогда, в этом случае, на этой почве обеспечивается для пары колес возможность проезда и существует возможность заменить выбор медленноскоростного колеса,
e) если обе скорости медленноскоростного колеса и быстроскоростного колеса находятся в пределах их технических условий, определяющих скорость в течение некоторого периода времени, который зависит от наклона поверхности земли, то из этого следует, что поверхность земли не обеспечивает сцепление и в этом случае необходимо заменить колесо,
f) если скорость автомобиля равна нулю «0» в период, который превышает величину, предварительно установленную в секундах, то это определяет необходимость замены колеса.
| ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА АВТОМОБИЛЯ | 1992 |
|
RU2047518C1 |
| DE 19844467 A1, 22.04.1999 | |||
| US 20030216850 А1, 20.11.2003 | |||
| ЕР 0280785 А2, 07.09.1988. | |||

