Изобретение относится к области транспортной светотехники, а более конкретно к способам и устройствам управления положением светового пучка фар транспортных средств относительно плоскости дорожного полотна.
Одной из актуальных задач повышения безопасности дорожного движения с участием мототранспортных средств является исключение ослепления водителей встречного транспорта и потери видимости возникающих в процессе выполнения ими поворотов. Анализ известных методов и средств, направленных на устранение этого недостатка, показывает, что их можно свести к трем принципиальным решениям:
- использование (см. патент №DE10102292 С1 ФРГ, М.кл. B60Q 1/115, 1/04, 11/00, B62J 6/02 от 19.01.2001 г.) по меньшей мере трех стационарно установленных оптических элементов, один из которых расположен в номинальном положении, т.е. в положении, при котором горизонтальная часть светотеневой границы перпендикулярна направлению движения, а два других повернуты вокруг оси, совпадающей с направлением движения в разные стороны на среднестатистический угол наклона мотоцикла при повороте. Такой подход не обеспечивает решения поставленной задачи, так как угол, на который развернуты дополнительные фары, жестко фиксированный, а угол наклона мотоцикла к плоскости дорожного полотна изменяется в зависимости от скорости прохождения поворотов и его радиуса в достаточно значительном диапазоне от 0 до 35°;
- использование (см. Патенты №2415783 ФРГ, М.кл. B60Q 1/10, B62J 5/02 от 02.04 1973 г., №2556876 ФРГ, М. кл. B60Q 1/10 от 19.12.1974 г., №19817594 А1 ФРГ, М. кл. B60Q 1/10, 1/08, 1/12, B62J 6/02 от 20.04.1998 г., №19906208 С2 ФРГ, М. кл. B60Q 1/08, B62J 6/02 от 15.02.1999 г., 19908481 С2 ФРГ, М.кл. B62J 6/02 от 26.01.1999 г.) системы, включающей: оптический элемент, сопряженный с исполнительным механизмом привода, систему датчиков положения мотоцикла относительно дорожного полотна, в результате работы которых исполнительный механизм поворачивает весь оптический элемент или фару в сборе на угол, соответствующий углу наклона мотоцикла к плоскости дорожного полотна. Такой подход к решению поставленной задачи имеет ряд существенных недостатков:
во-первых, в зависимости от количества оптических элементов в таких конструкциях используется и соответствующее количество приводов, что существенно усложняет конструкцию;
во-вторых, поворот оптического элемента или фары в сборе, имеющих относительно большую массу, требует повышенной потребляемой мощности привода и исполнительных механизмов, что при ограниченной мощности генератора мотоцикла практически невыполнимая задача;
в-третьих, в другом известном решении (см. патент №19817594 А1 ФРГ, М. кл. B60Q 1/10, 1/08, 1/12, B62J 6/02 от 20.04.1998 г.) блок датчика измеряет появляющееся ускорение вдоль вертикальной и продольной оси, что требует для устранения влияния вибраций и линейных ускорений в продольном направлении дополнительной серьезной фильтрации и обработки сигнала от датчика для вычисления угла наклона мотоцикла, что является серьезным недостатком, не позволяющим измерить угол наклона мотоцикла с требуемой для безопасности дорожного движения точностью.
Другим существенным недостатком этого технического решения является принцип вычисления угла наклона мотоцикла с использованием вектора g (ускорения свободного падения), поскольку в этом случае невозможно вычислить угол наклона мотоцикла при одновременном его движении по уклону и повороте, так как возникающее дополнительное ускорение вдоль вертикальной оси при таком характере движения будет вносить дополнительную ошибку в вычисления угла наклона, тем большую, чем с большей скоростью и большим наклоном движется мотоцикл. Очевидно, что такой подход вычисления угла наклона мотоцикла возможно использовать только при движении по относительно ровной поверхности и с достаточно постоянной линейной составляющей скорости движения мотоцикла, что совершенно неприемлемо на практике.
Задачей заявляемого технического решения является обеспечение динамического регулирования положения светового пучка фар транспортных средств в процессе выполнения поворотов с достаточной для безопасности дорожного движения точностью на дорогах с различным профилем и траекторией, при неизменных светотехнических характеристиках, минимальной мощности привода, способности точного возврата системы в номинальное положение при отсутствии управляющего сигнала.
Поставленная задача реализуется за счет того, что в способе динамического регулирования положения световых пучков фар транспортных средств в процессе выполнения поворотов, включающем: определение мгновенного угла наклона платформы от плоскости дорожного полотна путем измерения мгновенных значений ускорений в двух взаимно перпендикулярных направлениях, вычисления угла наклона, определение и отработку рассогласования по углу наклона платформы (т.е. механического узла, включающего волоконно-оптический преобразователь (фокон), установленный на подшипнике и механически связанный приводом с исполнительным механизмом, заключающийся в том, что измеряют угловую скорость вращения платформы в вертикальной плоскости, перпендикулярной направлению движения, измеряют мгновенное значение ускорений платформы в вертикальном и горизонтальном боковом направлениях, на основе полученных данных вычисляют угол наклона транспортного средства, мгновенное значение угла коррекции, величину центростремительного ускорения и коэффициент коррекции, пропорциональный центростремительному ускорению, производят процесс калибровки нулевого положения платформы и с учетом полученных результатов осуществляют стабилизацию положения платформы в горизонтальной плоскости.
Конструктивно поставленная задача обеспечивается за счет того, что блок-фара с блоком управления процессом динамического регулирования положения светового пучка фар транспортных средств в процессе выполнения поворотов содержит: привод с исполнительным механизмом, контроллер управления, систему датчиков, позволяющих определить угол наклона транспортного средства относительно плоскости дорожного полотна, в котором система датчиков выполнена в виде четырех независимых датчиков, один из которых предназначен для измерения угловой скорости вращения стабилизированной платформы, два других, объединенные единой микросхемой, предназначены для измерения значения ускорений транспортного средства по вертикальной и горизонтальной боковой осям соответственно, а также датчика нулевого положения платформы, предназначенного для определения начала отсчета.
Предлагаемый способ управления процессом динамического регулирования положения светового пучка фар транспортных средств в процессе выполнения поворотов и реализующий его блок позволяют за счет построения двухконтурной системы регулирования компенсировать основной сигнал регулирования, полученный после интегрирования угловой скорости вращения транспортного средства, дополнительным компенсирующим сигналом, учитывающим боковые продольные и поперечные ускорения, при использовании четырех независимых датчиков, один из которых измеряет угловую скорость вращения стабилизированного объекта управления, два других, объединенные единой микросхемой, - линейные мгновенные значения ускорений по вертикальной и горизонтальной боковой осям соответственно, а также датчика начала отсчета обеспечить высокую точность корректировки положения световых пучков в реальном масштабе времени.
Сущность изобретения иллюстрируется чертежами, показанными на фиг.1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12.
На фиг.1 показана динамическая схема системы регулирования.
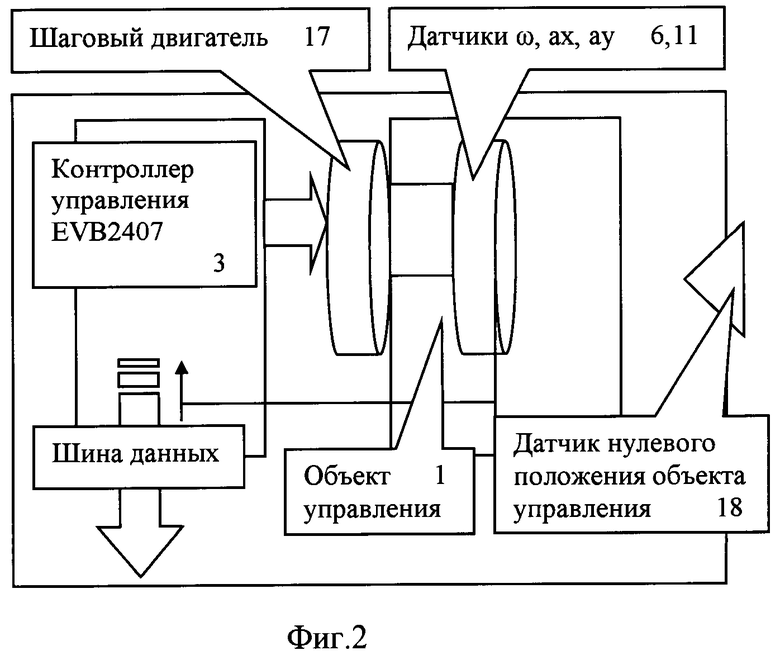
На фиг.2 показана структурная схема системы регулирования.
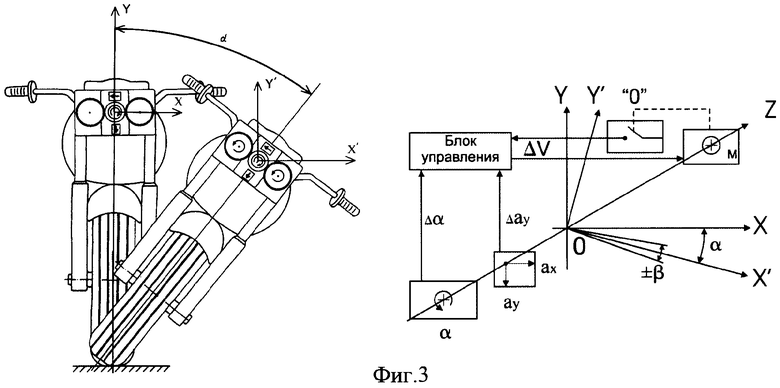
На фиг.3 показана схема работы системы регулирования.
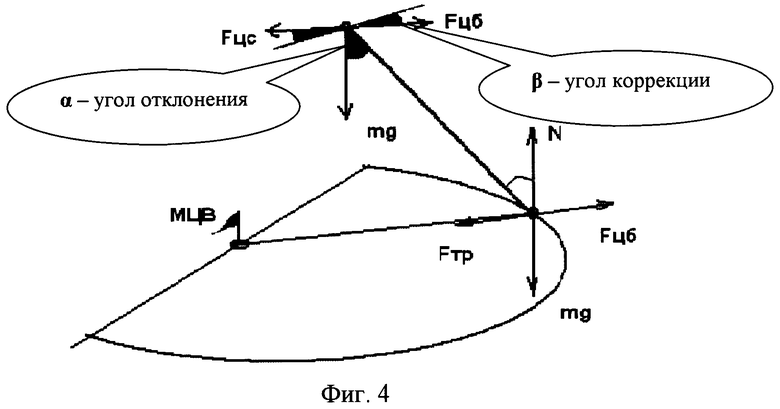
На фиг.4 показана структурная схема действующих на транспортное средство сил.
На фиг.5 показана блок-схема основного контура регулирования.
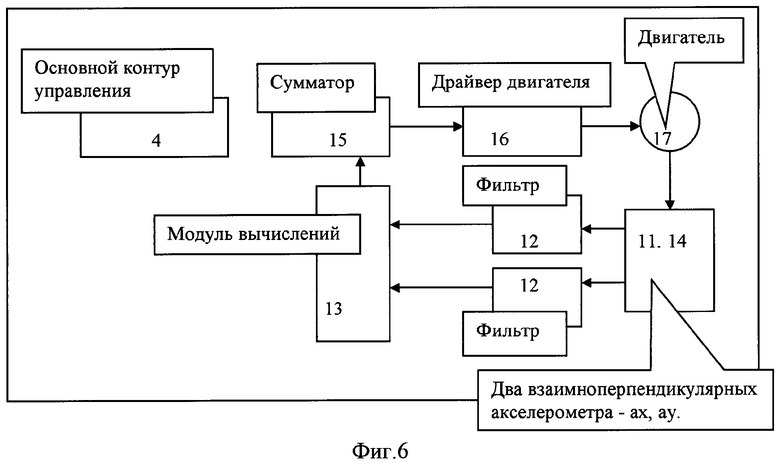
На фиг.6 показана блок-схема дополнительного контура регулирования.
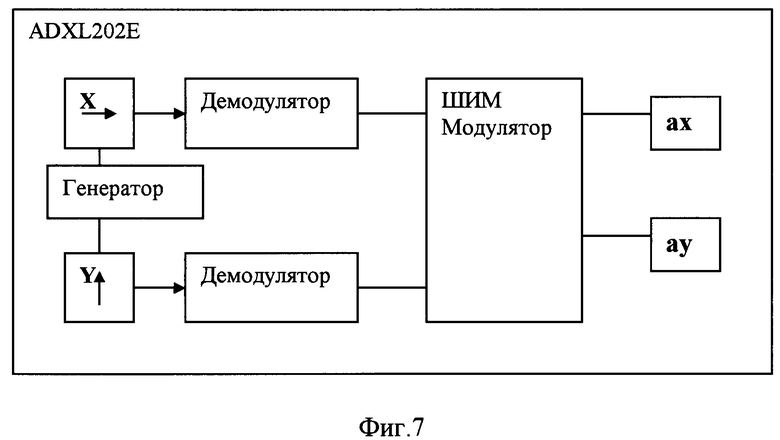
На фиг.7 показана структурная схема датчика ускорений.
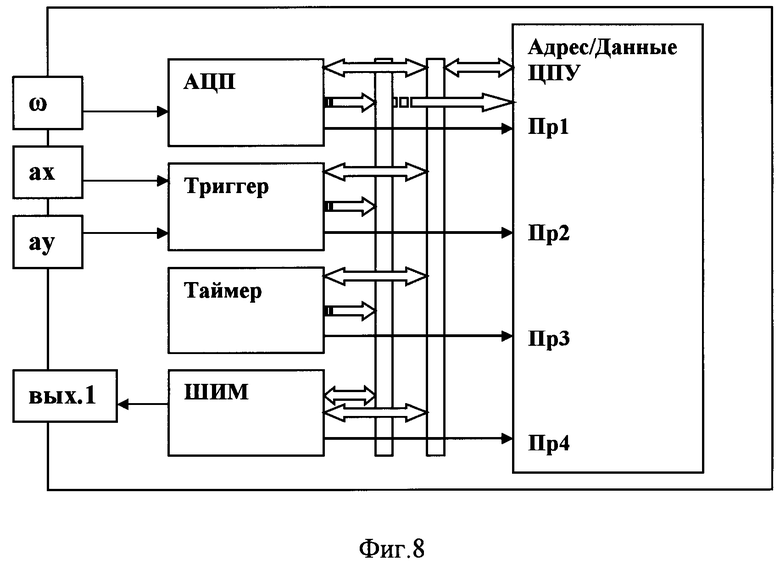
На фиг.8 показана структурная схема контроллера управления.
На фиг.9 показана диаграмма работы фильтра.
На фиг.10 показан вид сигналов.
На фиг.11 показана ориентация датчика ускорений.
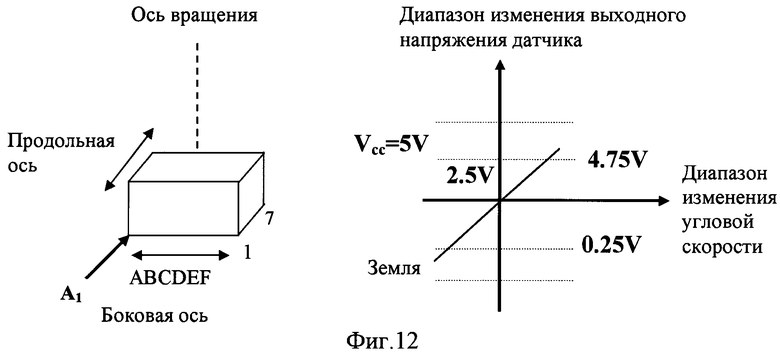
На фиг.12 показан вид выходного сигнала датчика угловой скорости.
Способ динамического регулирования положения светового пучка фар транспортных средств в процессе выполнения поворотов (см. фиг.1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12) включает: определение мгновенного угла наклона платформы от плоскости дорожного полотна путем измерения мгновенных значений ускорений в двух взаимно перпендикулярных направлениях, вычисления угла наклона, определение и отработку рассогласования по углу наклона платформы приводом с исполнительным механизмом, измерение угловой скорости вращения платформы в вертикальной плоскости, перпендикулярной направлению движения, измерение мгновенных значений ускорений платформы в вертикальном и горизонтальном боковом направлениях, вычисление угла наклона транспортного средства, мгновенного значения угла коррекции, величины центростремительного ускорения и коэффициента коррекции, пропорционального центростремительному ускорению, калибровку нулевого положения платформы и стабилизацию положения платформы в горизонтальной плоскости.
Для реализации способа управления система регулирования разбита на два замкнутых контура (основной и дополнительный) со своими локальными цепями обратной связи.
Основной контур регулирования, блок-схема которого показана на фиг.3, основан на принципе измерения угловой скорости вращения мотоцикла вокруг пятна контакта шин с дорожным покрытием с последующим определением мгновенного угла отклонения мотоцикла от вертикального положения (см. фиг.5). На фиг.4 представлена диаграмма сил, поясняющая измеряемые в процессе движения параметры. В процессе поворота транспортного средства (мотоцикла) по криволинейной траектории возникает центростремительное ускорение, которое направлено по радиусу к мгновенному центру вращения. В случае движения по круговой траектории с радиусом R центростремительное ускорение направлено вдоль радиуса к центру окружности. При этом величина (модуль) центростремительного ускорения пропорциональна квадрату линейной скорости мотоцикла и обратно пропорциональна радиусу круговой траектории движения, а линейная скорость направлена по касательной к траектории движения, то есть:
ац=V2/R,
где V - линейная скорость движения;
R - радиус круговой траектории движения.
Из условия динамического равновесия мотоцикла при движении по криволинейной траектории следует:
mац=mg tg(α),
где m - масса транспортного средства;
ац - центростремительное ускорение;
α - угол отклонения транспортного средства от вертикальной оси;
g - ускорение свободного падения.
Откуда определяется α - угол отклонения транспортного средства от вертикальной оси:
α=arctg(ац/g).
При этом дополнительный угол коррекции положения платформы с фоконами β, возникающий в результате динамического характера движения (изменения угла α) вычисляется по формуле:
β=arctg(Δ ax/Δ ay);
где Δ ax = ax i - ax(i-1) = Δ ац;
ax i, ay i - текущие значения отсчетов ускорений вдоль вертикальной и горизонтальной оси локальной системы отсчета соответственно;
Δ ау = ay i - ay (i-1);
ax(i-1), ay(i-1) - предыдущие значения отсчетов ускорений.
Вычисление угла коррекции β производится в блоке 11 дополнительного контура регулирования (фиг.5).
Ускорения ах и ау измеряются датчиками линейных ускорений, входящими в состав системы датчиков, вдоль горизонтальной оси х и вертикальной оси у локальной системы отсчета. Текущие значения отсчетов ускорений вдоль вертикальной и горизонтальной оси локальной системы отсчета соответственно ax i, ay i, вводятся с целью подчеркнуть дискретный характер измеряемых величин. Это связано с тем, что измерения величин ах, ау производятся не непрерывно, а в дискретные моменты времени.
В основе дополнительного контура регулирования, блок-схема которого показана на фиг.6, заложен принцип измерения линейных ускорений мотоцикла в двух взаимно перпендикулярных направлениях с последующим сравнением полученных значений с ускорением свободного падения. Результатом работы дополнительного контура регулирования является угол коррекции, который учитывается при расчете корректирующего сигнала, поступающего на шаговый двигатель.
Система управления динамическим корректором положения светового пучка фары мототранспортного средства в процессе выполнения поворотов содержит (см. фиг.1-12) объект управления 1, установленный на мототранспортном средстве с возможностью поворота вокруг оптической оси 2, контроллер управления 3, обеспечивающий функционирование системы по основному 4 и дополнительному 5 контурам регулирования. При этом основной контур регулирования 4 содержит: датчик угловой скорости 6, фильтр 7, интегратор 8, сумматор 9, ПИД-регулятор 10, а дополнительный контур регулирования 5 - датчик линейных ускорений 11, фильтры 12, модуль вычисления 13, температурный датчик 14, сумматор 15, драйвер двигателя 16. Кроме того, блок управления содержит шаговый двигатель 17, датчик нулевого положения платформы 18 и возвратную пружину 19.
При этом дополнительный контур регулирования включен в цепь регулирования последовательно с основным сигналом рассогласования, поступающим на шаговый двигатель 17.
Осуществляется способ управления процессом динамической корректировки положения светового пучка фар мототранспортных средств при выполнении поворотов следующим образом.
При выполнении мотоциклом поворота в результате динамических воздействий будет происходить наклон мотоцикла на угол α к плоскости дорожного полотна (см. фиг.4). При этом в зависимости от траектории движения мотоцикла, профиля дороги, скорости выполнения маневра, а также собственных характеристик мотоцикла - его массы, коэффициента сцепления поверхности шин с покрытием дорожного полотна и температуры окружающей среды значение угла α и скорость его изменения будут различными. Поэтому для определения мгновенного значения угла α вначале с помощью гироскопических датчиков 6, 11 (см. фиг.5, 6) определяются угловая скорость поворота мотоцикла с объектом управления и мгновенные значения линейных ускорений в вертикальном и боковом направлении.
Измеренные значения обрабатываются основным 4 и дополнительным контуром 5 контроллера управления 3 в соответствии с рабочим алгоритмом, согласно которому он получает и обрабатывает информацию об угловой скорости вращения мотоцикла относительно пятна контакта колес с дорожным покрытием. Вид выходного сигнала датчика угловой скорости показан на фиг.12. Поскольку поступающий сигнал от датчиков 6, 11 является аналоговым, он требует дополнительной обработки в виде фильтрации и нормировки, т.е. ограничения полосы пропускания аналогового тракта в области высоких частот, возникающих в результате вибрации мотоцикла при движении. Верхняя граничная частота тракта определяется необходимой скоростью реакции системы регулирования на внешнее воздействие.
Цифровые фильтры 7, 12, обрабатывающие входные сигналы гироскопических датчиков 6 и 11, можно отнести к FIR классу. Разностное уравнение фильтра для выборки из 20 отсчетов можно представить следующим образом:
y(n)=H(0)·x(n)+H(1)·x(n-1)+H(2)·x(n-2)+...+H(20)·x(n-20),
где
у(n) - выходной отсчет фильтра по индексу n;
х(n) - входной отсчет фильтра по индексу n.
Передаточную функцию фильтра можно представить следующим образом:

Диаграмма работы фильтров имеет вид, показанный на фиг.9.
Операция фильтрации производится цифровыми фильтрами 7, 12 (см. фиг.5, 6). Далее сигнал поступает на интегратор 8.
Для выполнения операции интегрирования используется известный метод трапеций [1], необходимая точность достигается 7 отсчетами в формуле трапеций.
На выходе интегратора 8 сигнал пропорционален текущему значению угла α отклонения платформы (объекта управления) от горизонтального положения. Полученный угол отклонения мотоцикла от вертикального положения сравнивается с заданным в сумматоре 9 с целью получения сигнала рассогласования, который после обработки в ПИД-регуляторе 10 и учета сигнала коррекции, поступающего из дополнительного контура 5, подается на драйвер 16 управления шаговым двигателем 17.
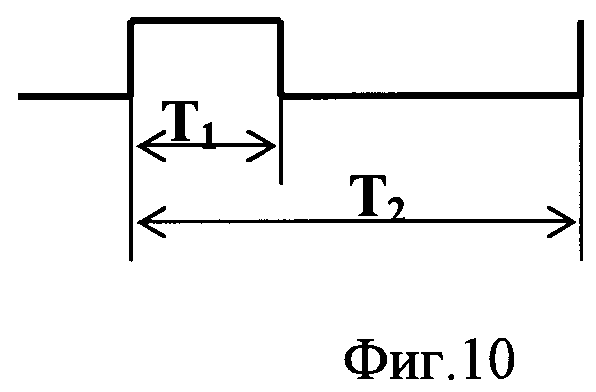
Контроллер управления 3, структурная схема которого показана на фиг.8, также получает и обрабатывает информацию о линейных ускорениях мотоцикла в двух взаимно перпендикулярных направлениях от датчика 11, представляющего собой два акселерометра, расположенных в вертикальной и горизонтальной плоскостях. Структурная схема датчика ускорений показана на фиг.7. Сигнал, поступающий от датчика 11, представляет собой широтно-импульсномодулированный сигнал. Информация о текущем линейном ускорении мотоцикла в боковом и вертикальном направлениях заложена в длительности импульса ШИМ-сигнала. Отфильтрованные сигналы датчика 11 поступают на модуль вычисления 13, в котором вычисляются: угол коррекции (β). Далее сигнал коррекции поступает на сумматор 15, где значение угла коррекции (β) учитывается при определении результирующего угла α. Модулем вычисления 13 осуществляется также определение ускорения по формуле:
A=(T1/T2-Toff)/S,
где Toff = Т1/Т2 (см. фиг.9) при нулевом наклоне (ускорении), S - коэффициент шкалы (в среднем S=12,5%).
Поскольку угол наклона датчика 11 пропорционален ускорению, действующему на его подвижную часть, то вычисление проводится по формуле (ϕ=arcsin(A). Ориентация датчика ускорений показана на фиг.11.
Для вычисления угла используется разложение функции arcsin(A) в ряд Тейлора [2], в котором для вычисления угла наклона с точностью до 0,5° достаточно ограничится первыми четырьмя членами. С целью устранения ошибок, связанных с внутренним представлением чисел в контроллере 3, используется арифметика многократной точности с фиксированной точкой [3].
В дополнительном контуре 5 регулирования происходит сравнение полученного при измерении угла с нулевым углом отклонения с целью формирования сигнала рассогласования. Система управления оснащена дополнительным датчиком 18 нулевого положения в горизонтальной плоскости, который срабатывает при горизонтальном положении платформы. В этом случае происходит коррекция положения нуля внутренней системы координат, а также происходит калибровка обоих акселерометров. Для проведения калибровки в момент срабатывания датчика горизонтального положения вычисляются Toff = T1/T2 при нулевом наклоне и значение S - коэффициента шкалы (S=(X1-X2)/2g, где X1 - показание датчика при - 1g; X2 - показание датчика при 1g.)
Использование в системе датчика ADXRS300 для измерения угловой скорости вращения платформы позволяет избежать влияния линейных ускорений мотоцикла на показания датчика, что является особенностью построения этой системы.
Таким образом, разделение рабочего алгоритма на две последовательные части позволяет сначала отработать основное отклонение от вертикальной оси, используя датчик ADXRS300, а затем производить корректирующие воздействия, используя датчики линейных ускорений ADXL202E, позволяющие измерять центробежные и центростремительные ускорения после основной коррекции положения платформы. Такой подход позволяет использовать линейные ускорения мотоцикла для дополнительной коррекции положения объекта управления платформы, что также является серьезным отличием рассматриваемой системы регулирования от аналогов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР МОТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304250C2 |
| Адаптивная фара головного освещения автомобиля | 2020 |
|
RU2758227C1 |
| Адаптивная система головного освещения автомобиля | 2016 |
|
RU2656976C1 |
| Устройство для обучения водителей транспортных средств | 1984 |
|
SU1277172A1 |
| ФАРА ГОЛОВНОГО СВЕТА МНОГОФУНКЦИОНАЛЬНАЯ УНИВЕРСАЛЬНАЯ | 2013 |
|
RU2558500C2 |
| Способ автоматического регулирования пучков света головных фар транспортного средства | 2023 |
|
RU2808589C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Адаптивная система переднего освещения | 2020 |
|
RU2747225C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАРЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289754C1 |
| СИСТЕМА КОНТРОЛЯ ТЯГИ | 2017 |
|
RU2688081C1 |



Изобретение относится к способу динамического регулирования положения светового пучка фар транспортного средства в процессе выполнения поворотов и устройству для его осуществления. Способ включает определение мгновенного угла наклона платформы от плоскости дорожного полотна путем измерения мгновенных значений ускорений в двух взаимно перпендикулярных направлениях, вычисление угла наклона, определение и отработку рассогласования по углу наклона платформы приводом с исполнительным механизмом. В процессе выполнения способа измеряют угловую скорость вращения платформы в вертикальной плоскости, перпендикулярной направлению движения, и мгновенное значение ускорений платформы в вертикальном и горизонтальном боковом направлениях. На основе полученных данных вычисляют угол наклона транспортного средства, мгновенное значение угла коррекции, величину центростремительного ускорения и коэффициент коррекции, пропорциональный центростремительному ускорению, производят процесс калибровки нулевого положения платформы и с учетом полученных результатов осуществляют стабилизацию положения платформы в горизонтальной плоскости. Технический результат - повышение точности регулирования положения светового пучка фар, уменьшение энергозатрат на регулирование. 2 н.п. ф-лы, 12 ил.
| DE 19817594 A1, 21.10.1999 | |||
| US 5787370 A, 28.07.1998 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2051051C1 |

