Настоящее изобретение в целом относится к области транспортных средств с четырьмя ведущими колесами, оборудованных системой управления распределением крутящего момента между первой осью и второй осью, выполненной также с возможностью управления муфтой, установленной между двумя осями.
В этих транспортных средствах крутящий момент распределяется между первой осью и второй осью, при этом сумма моментов, передаваемых на обе оси, равна входному крутящему моменту. Первая ось связана с передаточным валом, с которым при помощи указанной муфты соединена вторая ось. Только первая ось получает крутящий момент постоянно, а вторая ось в большей или меньшей степени соединяется муфтой, управляемой системой управления распределением. Таким образом, система управления может корректировать уровень момента, передаваемого на каждую из осей, например, в зависимости от режима работы транспортного средства.
В первом режиме работы крутящий момент полностью передается на первую ось, а на вторую ось момент не передается совсем. Во втором режиме работы уровень соединения привода является фиксированным, и распределение момента между двумя осями зависит от условий движения (склон,…) и от сцепления с дорогой. В третьем режиме работы моменты, передаваемые на обе оси, подвергаются постоянной коррекции в зависимости от условий движения транспортного средства.
Транспортные средства с четырьмя ведущими колесами могут сталкиваться с явлением буксования. Буксование соответствует разности скорости вращения между передней и задней осями. Буксование может быть нормальным явлением, например, в случае изменения скорости. Оно может быть также следствием разности радиуса качения, например, в случае плохого монтажа шины или прокола. В этом случае буксование является постоянным и может привести к перегреву и/или к разрушению муфты.
Муфта является механической системой трансмиссии, которая может в примере выполнения состоять из нескольких дисков, погруженных в масло, при этом одни из них соединены с валом, связанным со второй осью, а другие - с передаточным валом. В случае нормальной работы, когда существует разность скорости между передаточным валом и валом, соединенным со второй осью, диски сдвигают масло, температура которого повышается и которое расширяется и густеет. Давление на диски повышается, и в конечном итоге они начинают вращать друг друга. Таким образом, разность скорости между двумя валами уменьшается, и температура масла и муфты понижается. С другой стороны, при постоянном буксовании диски продолжают сдвигать масло, которое нагревается вплоть до возможного разрушения муфты по причине ее перегрева. В случае, когда муфта выполнена по принципу управляемого сцепления, сухое трение, связанное с контактом между дисками, может привести к разрушению от износа дисков по причине перегрева.
В документе JP4 103433 описана система управления распределением крутящего момента в транспортном средстве с четырьмя ведущими колесами. Эта система содержит сцепление для распределения момента, а также средства обнаружения буксования, скорости транспортного средства и разности диаметра шин четырех ведущих колес. Система позволяет уменьшать буксование за счет использования распределяющего момент сцепления, учитывая при этом, в случае необходимости, разность диаметра шин.
В документе JP6 1275028 описана система, позволяющая повысить управляемость транспортного средства с четырьмя ведущими колесами, в котором колеса не имеют абсолютно одинаковый диаметр. Эта система содержит датчики скорости передних и задних колес, систему вычитания и компенсирующее устройство. Таким образом, можно определять разность скорости вращения между передними и задними колесами, учитывая фактор компенсации, связанный с разностью диаметра. Соотношение между моментами, передаваемыми на переднюю и заднюю оси, в этом случае контролируют на основании разности скорости вращения.
Эти системы используют управление распределением крутящего момента для уменьшения буксования, но в них не предусмотрено никакой эффективной защиты для муфты в случае постоянного буксования. Они не позволяют также устранять буксование, появляющееся вследствие специфических условий качения. Они не предлагают системы управления распределением крутящего момента, интегрированной в систему управления четырьмя ведущими колесами.
Настоящее изобретение относится к способу управления распределением крутящего момента для моторного транспортного средства с четырьмя ведущими колесами, который может эффективно защищать муфту в случае постоянного буксования и, в частности, предохранять муфту от перегрева, связанного с постоянным буксованием.
Задачей настоящего изобретения является защита муфты в случае постоянного буксования вследствие плохого монтажа, разности диаметра колес, прокола с медленным выходом воздуха из шины, чрезмерной или недостаточной накачки.
Задачей изобретения является также обнаружение постоянного буксования и обеспечение возможности отличать его от нормального буксования или от буксования, связанного со специфическими условиями качения.
Задачей настоящего изобретения является защита муфты, не прибегая к бесполезному прерыванию режима работы «с четырьмя ведущими колесами», за счет компромисса между защитой муфты и использованием оптимального и регулируемого режима работы «с четырьмя ведущими колесами».
Изобретение призвано также относиться к транспортному средству с четырьмя ведущими колесами, оборудованному вычислительным устройством и муфтой, управляемой таким образом, чтобы обеспечить ее защиту в случае постоянного буксования.
Первым объектом изобретения является способ управления распределением крутящего момента для моторного транспортного средства с четырьмя ведущими колесами, установленными на двух осях, в котором определяют буксование, характеризующее разность скорости двух осей.
Согласно главному отличительному признаку этого способа, прекращают любую передачу крутящего момента на одну из двух осей, когда среднее значение буксования в течение параметрируемого времени превышает определенный порог.
Таким образом, в случае, когда передачу момента осуществляют при помощи муфты, управляемой электроникой, защиту муфты обеспечивают за счет того, что в случае буксования между передней и задней осями муфта может размыкаться, что позволяет избежать любого риска перегрева. Недостатком размыкания муфты является невозможность использования водителем режима полного привода на все четыре колеса. Используя среднее значение буксования, устраняют пики буксования, которые могут быть связаны с особыми обстоятельствами вождения, а также часть шума в цепи измерения буксования. Таким образом, избегают несвоевременного прерывания режима работы с четырьмя ведущими колесами.
Предпочтительно определяют условия качения транспортного средства и определяют буксование, только когда возникают определенные условия качения в течение вышеуказанного параметрируемого времени.
Размыкание муфты следует осуществлять только в случае постоянного буксования, и к нему не следует прибегать, если обнаруженное буксование вызвано, например, срабатыванием ABS (антиблокировочной тормозной системы) или прохождением виража. Для этого предусмотрено отслеживание условий качения. В случае если эти условия не соблюдены, то не только не происходит размыкания муфты, но и не происходит никаких вычислений. За счет этого обеспечивают экономию вычислительных ресурсов.
Согласно другому предпочтительному варианту выполнения, счетчик инкрементируют или декрементируют в зависимости от определенного буксования, соответствующего максимальному допустимому буксованию, и отключение передачи крутящего момента происходит, только когда указанный счетчик достигает первого порога.
Таким образом, не происходит несвоевременного размыкания муфты. Чтобы произошло размыкание, необходимо чтобы случаи буксования повторились определенное число раз. Учитывают также условия слабого буксования, чтобы затруднить размыкание муфты. Это соответствует реальной работе муфты. Действительно, температура, которая является основным фактором поломки муфты в случае постоянного буксования, понижается, если в течение некоторого времени буксование не наблюдается. Учитывая периоды отсутствия воздействия, приближаются к реальной модели поломки муфты. Муфта не размыкается несвоевременно, при этом обеспечивается эффективная защита от событий, которые могут действительно привести к повреждению муфты. Таким образом, достигают оптимального компромисса между необходимой защитой муфты и возможностью использования режима работы с четырьмя ведущими колесами.
Согласно предпочтительному варианту выполнения, проверяют, превышает ли среднее значение буксования второй порог за указанное параметрируемое время и является ли амплитуда изменения буксования за указанное параметрируемое время меньшей третьего порога, и если обе проверки подтвердились, инкрементируют счетчик.
Таким образом, можно не учитывать случайности, приводящие к значительному изменению буксования; отслеживают только стабилизированное буксование, связанное с проблематичной механической размерностью, такой как разность радиуса качения между передними и задними колесами. Предпочтительно эту инкрементацию счетчика подтверждают, только если скорость транспортного средства превышает заранее определенный порог.
Согласно другому предпочтительному варианту выполнения, проверяют, является ли среднее значение буксования за указанное параметрируемое время меньшим четвертого порога, равного указанному второму порогу минус константа, и счетчик декрементируют, только если среднее значение буксования меньше четвертого порога и амплитуда изменения значения буксования за указанное параметрируемое время меньше третьего порога.
Таким образом, декрементацию производят только в случае, когда буксование находится в стабилизированной фазе, ниже значения второго порога. Таким образом, избегают декрементации, связанной с особой ситуацией вождения или с присутствием шумов измерения. В случае колеблющегося постоянного буксования избегают последовательных фаз инкрементации и декрементации, которые сделали бы невозможным обнаружение колеблющегося буксования (гистерезис).
Согласно предпочтительному варианту выполнения, чтобы осуществлять прекращение передачи крутящего момента, можно также учитывать температуру муфты и/или передаваемый момент.
Действительно, в случае значительно меняющихся условий качения параметрируемое время может стать слишком большим по сравнению с быстротой изменения условий качения. В этом случае невозможно получить условия качения, которые остаются благоприятными в течение указанного параметрируемого времени. Следовательно, становится невозможным инкрементировать или декрементировать счетчик и отслеживать постоянное буксование. Возможным решением является уменьшение параметрируемого времени. Однако меньшее параметрируемое время может привести к более частой деактивации режима работы с четырьмя ведущими колесами. Чтобы этого избежать, дополнительные средства для обнаружения возможности повреждения (температуры и значения переданного момента) муфты обеспечивают возможность обнаружения постоянного буксования, не уменьшая параметрируемое время, тогда как условия качения меняются очень часто. Таким образом, можно сохранить компромисс между возможностью работы в режиме с четырьмя ведущими колесами и защитой муфты, которая только идет на пользу этой возможности. Другими словами, режим работы с четырьмя ведущими колесами можно использовать чаще без риска разрушения муфты, благодаря информации от температурного датчика и вычислению значения передаваемого крутящего момента.
Согласно предпочтительному варианту выполнения, буксование определяют при любом режиме работы (4×4, 4×2 или другом), чтобы не допускать внедорожного режима 4×4 при постоянном буксовании.
Для водителя транспортного средства предпочтительно, чтобы режим работы с четырьмя ведущими колесами не прерывался. Действительно, этот режим используют, когда водитель преодолевает препятствия, поэтому прерывание режима полного привода на четыре ведущих колеса может быть очень нежелательным.
Вторым объектом изобретения является моторное транспортное средство с четырьмя ведущими колесами, установленными на двух осях, содержащее передаточный вал, соединенный с первой осью, и управляемую муфту, выполненную с возможностью передачи крутящего момента от передаточного вала на вторую ось, средства определения соответствующих скоростей двух осей и систему управления распределением крутящего момента, выполненную с возможностью определения значения буксования, характеризующего разность скоростей между двумя осями, и с возможностью управления муфтой.
Согласно главному отличительному признаку этого варианта выполнения, система управления распределением крутящего момента конфигурирована для управления муфтой таким образом, чтобы исключать любую передачу крутящего момента через муфту, когда среднее значение буксования за параметрируемое время превышает определенный порог.
Согласно варианту выполнения, транспортное средство содержит средства определения условий качения транспортного средства, и система управления распределением момента конфигурирована для определения буксования, только когда в течение указанного параметрируемого времени соблюдаются определенные условия качения.
Согласно другому варианту выполнения, система управления распределением крутящего момента содержит счетчик, который можно инкрементировать или декрементировать в зависимости от определенного буксования, только когда указанные условия качения соблюдаются в течение параметрируемого времени, и, кроме того, система управления распределением момента сконфигурирована для прекращения передачи крутящего момента, только когда указанный счетчик достигает первого порога.
Согласно другому варианту выполнения, муфта содержит температурный датчик, связанный с системой управления распределением крутящего момента.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - схематичный вид моторного транспортного средства с четырьмя ведущими колесами;
фиг.2 - схема основных элементов системы управления работой транспортного средства;
фиг.3 - основные элементы программного обеспечения, установленного в вычислительном устройстве транспортного средства и обеспечивающего защиту муфты.
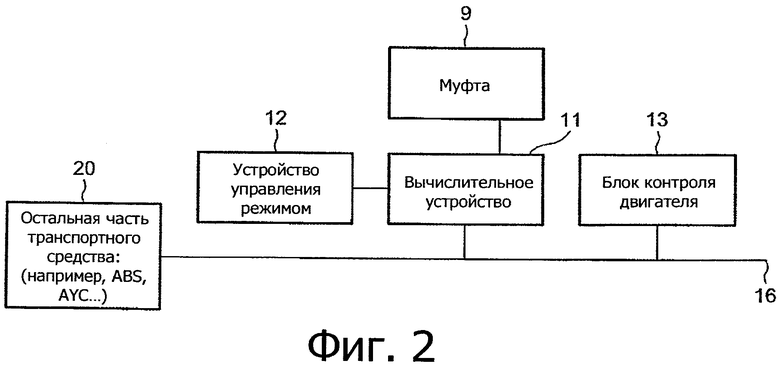
На фиг.1 схематично показаны основные элементы моторного транспортного средства Ve с четырьмя ведущими колесами и с постоянно включенной передачей крутящего момента на переднюю ось 2AV. Этот тип транспортного средства выбран в качестве примера. Двигатель транспортного средства может быть тепловым двигателем 3, электрическим двигателем или гибридной комбинацией. Постоянная передача крутящего момента может быть также включена на заднюю ось 2AR.
Транспортное средство содержит четыре колеса 1a, 1b, 1e, 1d, установленные соответственно на передней оси 2AV и на задней оси 2AR. Транспортное средство содержит также рулевое колесо 4, соединенное с рулевой колонкой 5. Кроме того, транспортное средство содержит коробку передач 6, передающую крутящий момент от двигателя 3 на переднюю ось 2AV и на переднюю раздаточную коробку 7. Передаточный вал 8, вращаемый раздаточной коробкой 7, соединен через муфту 9 с раздаточной коробкой 10 заднего моста, чтобы передавать крутящий момент от коробки передач 6 на заднюю ось 2AR.
Транспортное средство содержит также вычислительное устройство 11, выполненное, в частности, с возможностью управления муфтой 9, устройство 12 управления режимом и блок 13 контроля двигателя 3, выполненный с возможностью контроля работы двигателя 3 (в частности, для определения крутящего момента, создаваемого двигателем, и для оценки включенного передаточного отношения). Транспортное средство содержит также четыре датчика скорости колес 14а, 14b, 14е, 14d, по одному на каждое из колес 1a, 1b, 1e, 1d.
Вычислительное устройство 11 соединено с каждым из датчиков скорости колес 14а... 14d при помощи линий соединения 16а... 16d, обеспечивающих обмен данными. В варианте вычислительное устройство типа ABS и/или AYC (Active Yaw Control - англосаксонский термин, хорошо известный специалистам) может выдавать сигналы «скорости колес». Вычислительное устройство 11 соединено также с устройством 12 управления режимом через линию 16е, с блоком 13 контроля двигателя через линию 16f и с муфтой 9 через линию 16g. Электрическая линия 16g обеспечивает также прохождение управляющего тока для замыкания управляемой муфты 9. Блок индикации приборного щитка 15 тоже соединен через линию 16h с вычислительным устройством 11 для индикации водителю транспортного средства, в частности, используемого режима работы с четырьмя ведущими колесами и возможного перегрева муфты.
Транспортное средство с четырьмя ведущими колесами может работать в трех разных режимах работы.
В первом режиме работы коробка скоростей 6 вращает переднюю ось 2AV, муфта 9 разомкнута и не передает никакого момента на раздаточную коробку 10 заднего моста. Этот режим называют «4x2», поскольку вращение передается только на два колеса 1а и lb передней оси.
Во втором режиме работы коробка скоростей 6 вращает переднюю ось 2AV, и передаточный вал 8 вращает муфту 9, которая удерживается полностью замкнутой. Муфта 9 вращает раздаточную коробку 10 заднего моста таким образом, что часть крутящего момента, которая может составлять от нуля до максимального значения момента, передаваемого муфтой, поступает на заднюю ось 2AR. Этот режим называют «внедорожным с четырьмя ведущими колесами».
В третьем режиме работы коробка скоростей 6 вращает переднюю ось 2AV, и передаточный вал 8 вращает муфту 9, которой управляет ток от вычислительного устройства 11 таким образом, чтобы она была более или менее замкнутой в зависимости от крутящего момента, необходимого для каждой из осей. Таким образом, на заднюю ось 2AR передается переменная часть крутящего момента. Такой режим называют «автоматическим с четырьмя ведущими колесами».
Различные режимы работы зависят от состояния муфты 9. Замыканием муфты 9 управляет вычислительное устройство 11 через линию 16g. Таким образом, вычислительное устройство 11 управляет уровнем крутящего момента, передаваемого от передаточного вала 8 на раздаточную коробку 10 заднего моста. Для этого вычислительное устройство 11 получает данные, касающиеся:
- работы двигателя 3 от блока 13 контроля двигателя через линию связи 16f;
- намерения водителя транспортного средства от устройства 12 управления режимом, которое может приводиться в действие водителем. Эти данные поступают в вычислительное устройство через линию связи 16е; и
- скорости вращения четырех колес 1a…1d, определяемой четырьмя датчиками 14a…l4d скорости колес.Эти данные передаются в вычислительное устройство 11 через четыре линии 16а…16d.
В зависимости от этих данных вычислительное устройство 11 может выбрать соответствующий режим работы. Вычислительное устройство 11 выполнено также с возможностью передачи водителю транспортного средства данных, касающихся активного режима работы, через блок индикации приборного щитка 15 и линию связи 16h. В случае, когда выбранный режим является автоматическим режимом, вычислительное устройство 11 может определять необходимую степень замыкания муфты 9. Вышеуказанные линии связи 16а…16d могут быть, например, ветвями шины CAN (Controller Area Network - англо-саксонский термин, хорошо известный специалистам).
Согласно изобретению, вычислительное устройство 11 может также, в зависимости от полученных данных, выдавать командный сигнал для полного размыкания муфты 9, чтобы избежать перегрева или чрезмерного износа муфты 9 в случае постоянного буксования.
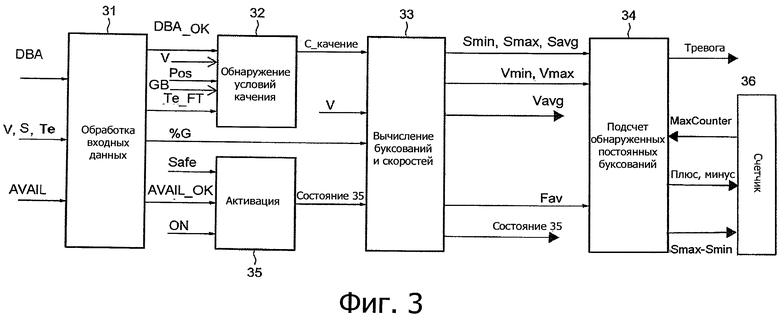
На фиг.2 схематично показаны основные элементы системы управления работой транспортного средства. Элементы, ранее показанные на фиг.1, обозначены теми же позициями.
На фиг.2 показано вычислительное устройство 11, связанное через линию 16g с муфтой 9, и устройство 12 управления режимом, связанное с вычислительным устройством 11. Шина 16 связи обеспечивает соединения между вычислительным устройством 11, блоком 13 контроля двигателя 3 и остальными органами контроля и управления транспортного средства, показанными в виде единого блока 20. Среди этих органов можно, например, указать систему торможения ABS и систему контроля траектории AYC (Active Yaw Control - англо-саксонский термин, хорошо известный специалистам).
Вычислительное устройство 11 может получать от блока 20 данные, касающиеся условий качения:
- данные, связанные с торможением транспортного средства: от системы торможения ABS, стояночного тормоза, педали тормоза.
- данные, связанные с работой системы контроля траектории AYC.
Затем вычислительное устройство может, например, направить сигнал управления размыканием муфты через электрическое соединение 16g в зависимости от условий качения, от намерения водителя и от состояния муфты.
На фиг.3 схематично в виде блока показаны подфункции программы принятия решения на размыкание муфты 9. Программа может быть установлена в вычислительном устройстве 11. В представленном примере первый блок 31 обработки получает на входе переменные, касающиеся работы транспортного средства. В частности, блок 31 обработки получает:
- переменные, обозначаемые ACF. Они связаны с состоянием органов обеспечения вождения и торможения. Переменные ACF могут передаваться одной или несколькими программами управления торможением и обеспечения вождения, установленными, например, в вычислительном устройстве 11. Среди переменных ACF можно указать:
- двоичную переменную, сигнализирующую об использовании ABS (антиблокировочная система);
- двоичную переменную, сигнализирующую об использовании контроля траектории AYC;
- двоичную переменную, сигнализирующую об использовании антипробуксовочной системы (ASR Acceleration Slip Regulation - англо-саксонский термин, хорошо известный специалистам);
- двоичную переменную, сигнализирующую об использовании регулирования момента инерции двигателя (MSR MotorSchleppmomentRegler - немецкий термин, хорошо известный специалистам); и
- переменную, указывающую на применение торможения водителем при помощи педали или стояночного тормоза (ручной тормоз).
На основании переменных ACF блок 31 обработки определяет, что ни одна система обеспечения вождения (AYC, MSR, ASR), ни одна система обеспечения торможения (ABS) и ни один из тормозов не активированы одновременно. В этом случае он направляет в блок 32 обнаружения двоичную данную ACF_OK со значением 1.
Блок 31 обработки получает также переменные V, G, Cm, соответственно касающиеся скорости транспортного средства, буксования между двумя осями и крутящего момента, передаваемого от двигателя на две оси. Переменные V и G поступают от четырех датчиков 14а, 14b, 14 с, 14d скорости колес, тогда как переменная Cm поступает от блока 13 контроля двигателя 3.
В частности, скорость V транспортного средства Ve оценивают на основании среднего значения скоростей, измеряемых двумя датчиками 14 с и 14d скорости задних колес. Буксование между двумя осями оценивают на основании разности между двумя скоростями вращения, то есть скоростями вращения передней оси 2AV и задней оси 2AR. В варианте выполнения скорость вращения передней оси можно определить посредством вычисления среднего значения скоростей, измеряемых двумя датчиками 14а, 14b передних колес. Аналогично, скорость вращения задней оси можно определить посредством вычисления среднего значения скоростей, измеряемых двумя датчиками 14а и 14d задних колес. Наконец, оценку крутящего момента Cm производит блок 13 контроля двигателя 3. Блок 13 контроля выдает также оценку включенного передаточного отношения.
На основании переменных V и G блок 13 обработки вычисляет буксование, выраженное в процентах относительно скорости транспортного средства %G, и передает это значение в вычислительный блок 33. На основании переменной Cm и оценки включенного передаточного отношения блок 31 обработки определяет момент, создаваемый двигателем на передней оси, Cm_AV, и передает это значение в блок 32 обнаружения.
Блок 31 обработки получает также переменные DISP, касающиеся наличия и достоверности входных данных, которые используют для обнаружения погрешностей датчиков или ошибок входных данных. Среди переменных DISP можно, например, указать следующие переменные:
- двоичную переменную состояния определения крутящего момента;
- двоичную переменную состояния обнаружения включения скорости;
- двоичную переменную состояния положения педали акселератора;
- двоичную переменную состояния обнаружения ABS;
- двоичную переменную состояния обнаружения контроля траектории (AYC);
- двоичную переменную состояния обнаружения антипробуксовки (ASR);
- двоичную переменную состояния обнаружения регулирования момента инерции двигателя (MSR).
Блок 31 обработки определяет также, находятся ли датчики 14а, 14b, 14 с, 14d в рабочем состоянии и передают ли они рабочие данные.
На основании этих переменных и этих данных блок 31 обработки определяет, все ли датчики работают и все ли необходимые переменные поступают и являются достоверными. В случае необходимости, он передает в блок 35 активации двоичное значение DISPOK, касающееся наличия поступающих данных.
Кроме переменных ACFOK и Cm_AV, передаваемых блоком 31 обработки, блок 32 обнаружения получает переменные V, POS и BV. Переменная V соответствует переменной V на входе блока 31 обработки. Переменная POS является десятичной переменной, значение которой выражает положение педали акселератора. Эта данная поступает, например, от блока 13 контроля двигателя 3. Переменная BV является двоичной переменной, которая принимает значение 1, если в коробке 6 передач включено передаточное отношение. Эта данная поступает, например, от блока 13 контроля двигателя.
На основании полученных переменных блок 32 обнаружения определяет, удовлетворены ли условия качения для вычисления буксования. Если условия не удовлетворены, вычислительный блок 33 не активируется. Это позволяет осуществлять обнаружение буксования, только если условия качения удовлетворены. Таким образом, для обнаружения постоянного буксования учитывают только нормальные буксования, связанные с особыми обстоятельствами, такими как: переключение передаточного отношения, вождение на вираже, торможение, работа системы обеспечения вождения, снятие ноги с педали акселератора, полное ускорение транспортного средства.
В случае необходимости, блок 32 обнаружения передает в вычислительный блок 33 переменную С_качение, равную 1. Чтобы блок 32 обнаружения выдал переменную С_качение, необходимо, чтобы были соблюдены следующие условия:
- переменная ACF_OK равна 1, это позволяет избежать вычисления постоянного буксования в случае, когда транспортное средство находится в состоянии торможения или когда активировано устройство обеспечения вождения или торможения.
- переменная V превышает первый порог, это позволяет избежать вычисления постоянного буксования в случае, когда транспортное средство проходит вираж.
- переменная POS превышает второй порог: это позволяет избежать вычисления постоянного буксования, если водитель снимает ногу с педали.
- переменная BV равна 1: это позволяет избежать вычисления постоянного буксования в случае, когда транспортное средство меняет скорость.
- переменная Cm_AV меньше третьего порога: это позволяет избежать вычисления постоянного буксования в случае, когда транспортное средство находится в стадии полного ускорения.
Все три вышеупомянутых порога можно параметрировать. Это позволяет адаптировать условия для обнаружения постоянного буксования в зависимости от вождения со стороны водителя или от дорожных условий качения. Например, минимальную скорость, начиная от которой предусмотрено обнаружение буксования, можно повысить в случае спортивного вождения.
Кроме переменной DISPOK, блок 35 активации получает переменную защиты Sec и переменную включения ON. Переменная Sec является двоичной и равна 1, если не обнаружено никакого сбоя в работе других вычислительных устройств или программ. Переменная ON тоже является двоичной и равна 1, если включена функция предупреждения о постоянном буксовании. На основании этих данных блок 35 активации направляет в вычислительный блок 33 переменную активации Состояние 35. Эта переменная равна 1, если переменные DISP_OK, Sec и ON имеют значение 1. Факультативно блок 35 активации может получать значение от устройства 12 управления режимом. В случае необходимости, он направляет значение Состояние 35, равное 1, только если водитель транспортного средства выбрал автоматический режим работы с четырьмя ведущими колесами.
Кроме переменных С_качение, %G и Состояние 35, вычислительный блок 33 получает переменную V. Переменная V соответствует скорости V на входе блока 31 обработки. На основании переменной %G и скорости V вычислительный блок 33 вычисляет переменные скорости Vmin, Vmax, Vmoy и буксования Gmin, Gmax, Gmoy. Значения Gmin, Gmax, Gmoy соответствуют значению минимального, максимального и среднего буксования в течение параметрируемого времени MinTime. Значения Vmin, Vmax, Vmoy соответствуют минимальной, максимальной и средней скорости транспортного средства в течение времени MinTime. Вычислительный блок 33 производит эти вычисления, только если двоичные значения С_качение и Состояние 35 равны 1.
Вычислительный блок 33 вычисляет также двоичное значение Fav, связанное с реализацией требуемых условий. Значение Fav становится 1, если в течение времени MinTime проверяются условия качения С_качение. Вычислительный блок 33 вычисляет также двоичное значение Состояние 33 на 2 битах, соответствующее состоянию на диаграмме потока подфункции вычислительного блока 33. Действительно, подфункцию блока 33 можно представить в виде диаграммы с 4 состояниями:
- состояние -1 соответствует состоянию по умолчанию блока 33.
- состояние 0 соответствует состоянию инициализации. Переменные скорости и вычисляемого буксования устанавливают на 0.
- состояние 1 становится активным, как только двоичная переменная С_качение переходит к значению 1, и не активным, как только оно переходит на 0. Пока С_качение остается равным 1, происходит вычисление переменных скорости и буксования.
- состояние 2 является активным, если значение С_качение равно 1 в течение минимального параметрируемого времени, при этом двоичная переменная Fav переходит от значения 0 к 1. Именно в момент активации этого состояния 2 в блок подсчета 34 направляются переменные скорости и буксования, а также переменная Fav.
Блок 34 подсчета фильтрует эти переменные для подачи команды, при необходимости, на включение тревожного сигнала о постоянном буксовании через двоичную переменную Тревога. Когда переменная Тревога переходит в значение 1, срабатывает тревожный сигнал о буксовании. Именно этот тревожный сигнал приводит к включению размыкания управляемой муфты вычислительным устройством 11 через линию соединения 16g. В частности, блок 34 подсчета осуществляет одновременно обнаружение постоянного буксования, подсчет случаев наступления постоянного буксования и генерирование тревожного сигнала. Для этого блок 34 подсчета взаимодействует со счетчиком 36. Счетчик 36 управляется блоком 34 подсчета с целью его инкрементации (плюс) при каждом случае обнаруженного постоянного буксования. Когда счетчик 36 достигает параметрируемого порога MaxCounter, значение переменной Тревога переходит на 1.
При этом инкрементация (плюс) происходит, если переменная Fav равна 1, если амплитуда изменения буксования (Gmax-Gmin) в течение времени MinTime меньше другого параметрируемого порога (MaxDeltaSlip) и если в течение времени MinTime среднее буксование Gmoy превышает параметрируемое пороговое значение MinWheelSlip. Счетчик может быть также декрементирован, если переменная Fav равна 1, амплитуда изменения буксования (Gmax-Gmin) в течение времени MinTime меньше MaxDeltaSlip и если среднее буксование меньше порога, равного указанному второму порогу минус константа MinWheelSlip-Constant. Константу (Constant) предпочтительно можно выбирать со значением, связанным с гистерезисом (WheelSlipHyst).
Настоящее изобретение обеспечивает эффективную защиту муфты без чрезмерного расходования ресурсов памяти и без бесполезных прерываний работы в режиме 4x4. Изобретение, позволяющее обнаруживать постоянное буксование, можно также применять для выявления проблемы, являющейся причиной такого постоянного буксования. Таким образом, можно обнаруживать износ шин, неправильное давление накачки или слишком большую нагрузку транспортного средства.
Пороговые значения, которые обеспечивают благоприятные условия качения, можно параметрировать, поэтому можно отдавать приоритет отказу от прерывания режима работы с четырьмя ведущими колесами перед защитой муфты или наоборот. Например, в вычислительном блоке 33 можно уменьшить минимальную скорость или увеличить параметрируемое время MinTime для обеспечения защиты муфты. Можно также корректировать компромисс защита муфты / работа в режиме с четырьмя ведущими колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ СРЕДСТВОМ СОЕДИНЕНИЯ ОСЕЙ СИСТЕМЫ ТРАНСМИССИИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2570927C2 |
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ СРЕДСТВОМ СОЕДИНЕНИЯ ПЕРВОЙ И ВТОРОЙ ОСЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2577414C2 |
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ СРЕДСТВОМ СОЕДИНЕНИЯ ПЕРВОЙ И ВТОРОЙ КОЛЕСНЫХ ОСЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2575737C2 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЧЕСКОГО СРЕДСТВА СОЕДИНЕНИЯ ПЕРВОЙ И ВТОРОЙ КОЛЕСНЫХ ОСЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2577406C2 |
| СИСТЕМА И СПОСОБ ОГРАНИЧЕНИЯ КРУТЯЩЕГО МОМЕНТА ТРАНСПОРТНОГО СРЕДСТВА С ЧЕТЫРЬМЯ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2586431C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266448C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОБУКСОВКОЙ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ БЛОКИРОВАНИЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2307035C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РАБОТЫ СИСТЕМЫ ТРАНСМИССИИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561484C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
Изобретение относится к транспортным средствам с четырьмя ведущими колесами. В способе управления распределением крутящего момента между двумя осями для транспортного средства с четырьмя ведущими колесами, установленными на двух осях, определяют буксование, характеризующее разность скорости двух осей. Когда среднее значение буксования в течение параметрируемого времени превысит заданный порог, прекращают передачу любого момента на одну из двух осей. Изобретение также относится к моторному транспортному средству с системой управления распределением крутящего момента. Решение направлено на защиту муфты в случае постоянного буксования. 2 н. и 9 з.п. ф-лы, 3 ил.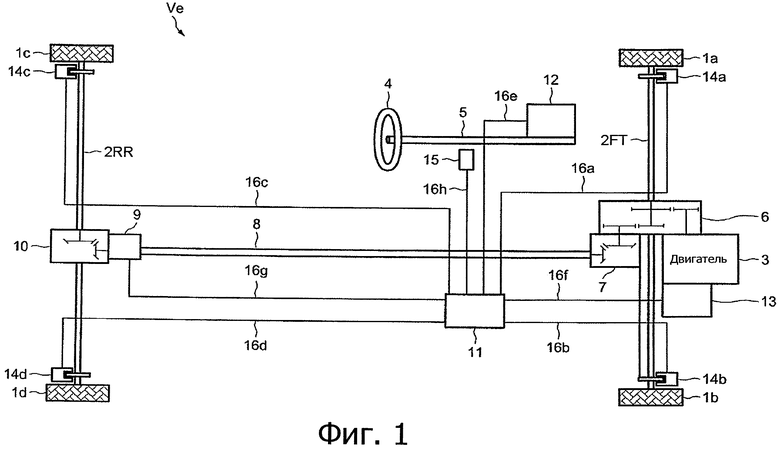
1. Способ управления распределением крутящего момента между двумя осями (2AV, 2AR) для моторного транспортного средства с четырьмя ведущими колесами (1а, 1b, 1c, 1d), установленными на двух осях, в котором определяют буксование, характеризующее разность скорости двух осей, отличающийся тем, что прекращают передачу любого момента на одну из двух осей, когда среднее значение буксования в течение параметрируемого времени (MinTime) превысит заданный порог.
2. Способ по п.1, отличающийся тем, что определяют условия качения транспортного средства и определяют буксование, только если соблюдены заданные условия качения (С_качение) в течение параметрируемого времени (MinTime).
3. Способ по п.1, отличающийся тем, что инкрементируют или декрементируют счетчик (36) в зависимости от буксования, и отключают передачу крутящего момента тогда, когда указанный счетчик достигает первого порога (MaxCounter).
4. Способ по п.3, отличающийся тем, что проверяют, превышает ли среднее значение буксования (Gmoy) второй порог (MinWheelSlip) за параметрируемое время (MinTime) и является ли амплитуда изменения буксования (Gmax-Gmin) за параметрируемое время (MinTime) меньшей третьего порога (MaxDeltaSlip), и если обе проверки подтвердились, инкрементируют счетчик.
5. Способ по п.4, отличающийся тем, что проверяют, является ли среднее значение буксования (Gmoy) за параметрируемое время (MinTime) меньшим четвертого порога, равного второму порогу минус константа (MinWheelSlip-Constant), и счетчик декрементируют, когда среднее значение буксования меньше четвертого порога и амплитуда изменения значения буксования (Gmax-Gmin) за параметрируемое время (MinTime) меньше третьего порога.
6. Способ по п.1, отличающийся тем, что для прекращения передачи крутящего момента, учитывают температуру муфты и/или передаваемый момент.
7. Способ по п.2, отличающийся тем, что буксование определяют, когда выбран автоматический режим с четырьмя ведущими колесами, соответствующий распределению переменного крутящего момента между передней осью (2AV) и задней осью (2AR).
8. Моторное транспортное средство (Ve) с четырьмя ведущими колесами (1a, 1b, 1c, 1d), установленными на двух осях (2AV, 2AR), содержащее передаточный вал (8), соединенный с первой осью, и управляемую муфту (9), выполненную с возможностью передачи крутящего момента от передаточного вала (8) на вторую ось, средства определения скоростей двух осей и систему (11) распределения крутящего момента, выполненную с возможностью определения значения буксования, характеризующего разность скоростей между двумя осями, и с возможностью управления муфтой,
отличающееся тем, что система управления распределением крутящего момента выполнена с возможностью управления муфтой (9) и предназначена для прекращения передачи крутящего момента через муфту, когда среднее значение буксования за параметрируемое время (MinTime) превышает заданный порог.
9. Транспортное средство по п.8, отличающееся тем, что оно содержит средства определения условий качения транспортного средства, причем система управления распределением крутящего момента предназначена для определения буксования, когда в течение параметрируемого времени (MinTime) соблюдаются заданные условия качения (С_качение).
10. Транспортное средство по п.9, отличающееся тем, что система управления распределением крутящего момента содержит счетчик (36), который выполнен с возможностью инкрементирования или декрементирования в зависимости от буксования, когда условия качения (С_качение) соблюдаются в течение параметрируемого времени (MinTime), и, при этом система управления распределением момента предназначена для прекращения передачи крутящего момента, когда счетчик достигает первого порога (MaxCounter).
11. Транспортное средство по п.8, в котором муфта (9) содержит температурный датчик, соединенный с системой управления распределением крутящего момента.
| US 2009045001 A1, 19.02.2009 | |||
| US 5609219 A, 11.03.1997 | |||
| DE 102008026662 A1, 10.12.2009 | |||
| WO 2009140055 A2, 19.11.2009 |

