Область техники, к которой относится изобретение
Настоящее изобретение относится к электромеханическим подъемным устройствам.
Более конкретно изобретение относится к устройствам вышеуказанного типа, наиболее проработанным и реализованным для обеспечения подъема с самовыравниванием, например, самолетов и вертолетов, грузовиков, поездов, водных транспортных средств, передвижных мостов, передвижных диспетчерских башен, радаров, телескопических мачт, передвижных платформ, подъемных вагонов, промышленных рабочих станков, сельскохозяйственных рабочих машин, ракетных пусковых платформ и космических челноков, стабилизаторов для любого типа транспортных средств, автомобилей-фургонов и т.д.
Устройство, соответствующее изобретению, также может поднимать моторные люльки, опорные системы для сборки самолетов, корабли, вертолеты, строительные платформы, подъемные устройства для зданий и т.д.
Кроме того, устройство, соответствующее изобретению, может также использоваться для подъема самолетов на плавающих платформах или авианосцах.
Техническое решение, предложенное в соответствии с настоящим изобретением, позволяет синхронизировать самовыравнивание одного или множества подъемных устройств для осуществления подъемной операции.
Нижеприводимое описание посвящено рассмотрению использования устройства для подъема самолетов и вертолетов и, в частности, каждой подъемной операции центрирующего вывешивания и регламентных работ, но очевидно, что не следует рассматривать изобретение как ограничивающееся этими конкретными случаями применения.
Уровень техники
Как хорошо известно, в настоящее время подъемные системы для самолетов и вертолетов являются системами гидравлического, гидропневматического, электрогидравлического или механического типов, а те из них, которые разработаны в последнее время, являются полуавтоматическими или подъемными системами, приводимыми в действие операторами при помощи блоков управления.
Также известно, что для выполнения такой подъемной операции в настоящее время задействуется, по меньшей мере, 3-5 человек на каждой операции и для выравнивания самолета или вертолета используется инструмент, известный под названием отвеса.
Эта операция осуществляется с использованием оптического контроля, обеспечиваемого для каждого самолета по участку, заданному изготовителем.
Также известно, что для осуществления подъемной операции в настоящее время используются системы, не позволяющие в подъемной операции компенсировать угловое отклонение самолета относительно демпфирующих элементов во время подъемной операции.
Кроме того, в известных технических решениях предлагаются самовыравнивающие системы с ручным управлением, управляемые оператором на основе проверки уровня жидкости.
Раскрытие изобретения
В техническом решении, соответствующем настоящему изобретению, операция выравнивания во время фаз подъема и опускания выполняется при помощи электронного уровня, соответствующим образом настраиваемого в каждом конкретном случае, взаимодействующего с управляющей картой, расположенной внутри подъемного устройства, известной под названием управляющего устройства, взаимодействующей со всеми остальными подъемными системами, задействованными для выравнивания самолета, совершенно одновременно приводящимися, действие одним оператором, расположенным в совершенно безопасном месте на большом расстоянии от самолета или вертолета, выполняющими операции подъема, вывешивания и центрирования за время, меньшее требуемого для этого в настоящее время. Операция выравнивания, т.е. непрерывного контроля положения поднимаемого самолета выполняется автоматически при помощи уровня, управляющей карты и совершенной синхронности подъема без помощи оператора, т.е. самолет располагается в плоскости x-y с нулевым отклонением и, следовательно, в полностью выровненном положении, благодаря чему обеспечивается возможность осуществления балансировочной операции, расчета плеч перемещения, а также проведения одиночной операции вывешивания отдельной точки или всей конструкции в автоматическом режиме.
Система управления внутри управляющего устройства получает и обрабатывает сигналы, отправляемые к электронному уровню, который может представлять собой уровень с качающейся иглой или лазерным уровнем, и после этого отправляет сигналы на включение подъемных устройств для выполнения операции подъема и опускания.
Основной целью настоящего изобретения является разработка полностью автоматического подъемного устройства, позволяющего осуществлять точный и безопасный подъем с самоторможением и с микрометровой точностью, соответствующего всем требованиям безопасности и снабженного системой ручного отключения для обеспечения опускания устройства в случае отказа электронной системы управления, изобретенное устройство, кроме того, является универсальным и может встраиваться в любое известное гидравлическое подъемное устройство.
Еще одной целью изобретения является обеспечение быстрого и точного выполнения подъемных операций при нахождении оператора в совершенно безопасном месте.
Еще одной целью настоящего изобретения является обеспечение замены различных существующих подъемных элементов.
Эти и другие результаты получены в соответствии с настоящим изобретением за счет использования электромеханического подъемного устройства с телескопическим винтом, размеры которого специальным образом подобраны для конкретного использования и применения предпочтительного и наиболее подходящего материала. Таким образом, конкретной целью настоящего изобретения является разработка электромеханического подъемного устройства, включающего в себя подъемный верхний элемент и управляющий и позиционирующий несущий элемент, указанный подъемный верхний элемент включает в себя в основном вертикальный телескопический цилиндрический элемент, состоящий из множества внешних телескопических корпусных элементов и множества внутренних телескопических резьбовых элементов, элемент для соединения с поднимаемым объектом выполнен над верхним корпусным элементом, верхний элемент нижнего внутреннего резьбового элемента связан указанным подъемным соединительным элементом, на промежуточном(ых) резьбовом(ых) элементе(ах) выполнена внешняя и внутренняя резьба, а на нижнем внутреннем резьбовом элементе резьба выполнена только на внешней поверхности, соединение между указанными корпусными элементами выполнено таким образом, что исключается передача вращения между соседними элементами.
В первом варианте осуществления устройства в соответствии с изобретением указанный несущий элемент жестко соединен с указанным верхним подъемным элементом.
Во втором варианте осуществления устройства в соответствии с изобретением указанный несущий элемент связан с указанным верхним подъемным элементом посредством разъемного соединения.
Кроме того, в соответствии с изобретением указанный несущий элемент может снабжаться электродвигателем, редуктором и зубчатыми колесами для передачи перемещения.
В соответствии с изобретением передача поднимающего перемещения может всегда осуществляться вдоль горизонтальной оси или вдоль вертикальной оси.
Также в соответствии с изобретением под указанным верхним подъемным элементом может устанавливаться компенсирующая пластина для компенсации перемещений в плоскости при подъеме.
В частности, указанная пластина может состоять из трех различных расположенных рядом элементов, у которых имеются соединения типа "ласточкин хвост", обеспечивающие их скольжение вдоль осей x, y в плоскости их расположения, а внутри вырезов типа "ласточкин хвост" имеются пружины, которые при помощи кронштейнов и винтов закреплены на указанной пластине, при этом указанные винты дополнительно выполняют функцию соединительных элементов указанных элементов пластины, а указанные пружины обеспечивают центрирование верхнего элемента и нижнего элемента относительно центрального элемента таким образом, что они могут поступательно перемещаться в продольном и поперечном направлениях.
В еще одном варианте осуществления устройства в соответствии с изобретением связь между указанным соединительным элементом поднимаемого объекта и указанными верхним и нижним внутренними резьбовыми элементами осуществляется посредством обеспечения наклона указанного соединительного элемента поднимаемого объекта.
В частности, в соответствии с изобретением указанный соединительный элемент поднимаемого объекта состоит из крышки, соединенной с верхним краем указанного внутреннего резьбового элемента при помощи пружин, причем указанная крышка установлена внутри проточки, выполненной в указанном верхнем крае нижнего внутреннего резьбового элемента.
Кроме того, в соответствии с изобретением в указанном верхнем подъемном элементе имеются датчики нагрузки.
В соответствии с изобретением указанное устройство может быть оборудовано системой обозначения неисправностей, системой глобального позиционирования на местности (GPS), системой контроля (GSM) и автоматической системой управления проведением регламентных работ.
Кроме того, в соответствии с изобретением в указанное подъемное устройство может быть встроен ксеноновый осветительный элемент или осветительный элемент любого другого типа, устройство может быть снабжено системой освещения, обеспечивающей работу в ночное время, системой лазерного прицеливания для идеального центрирования устройства под поднимаемым объектом.
Кроме того, в соответствии с изобретением указанное устройство может быть снабжено ведущим колесом или приводимой от электродвигателя тележкой с электрическими направляющими и специальными колесами.
И, наконец, устройство в соответствии с изобретением может быть снабжено взрывозащищенными электродвигателями.
Взаимодействие между подъемными устройствами и уровнем может осуществляться через кабель, по каналу беспроводной связи стандарта Bluetooth и по радиоканалу.
Краткое описание чертежей
Описание настоящего изобретения приводится далее лишь в целях иллюстрации, а не для наложения ограничений, в соответствии с его предпочтительными вариантами осуществления, со ссылками на фигуры прилагаемых чертежей, на которых:
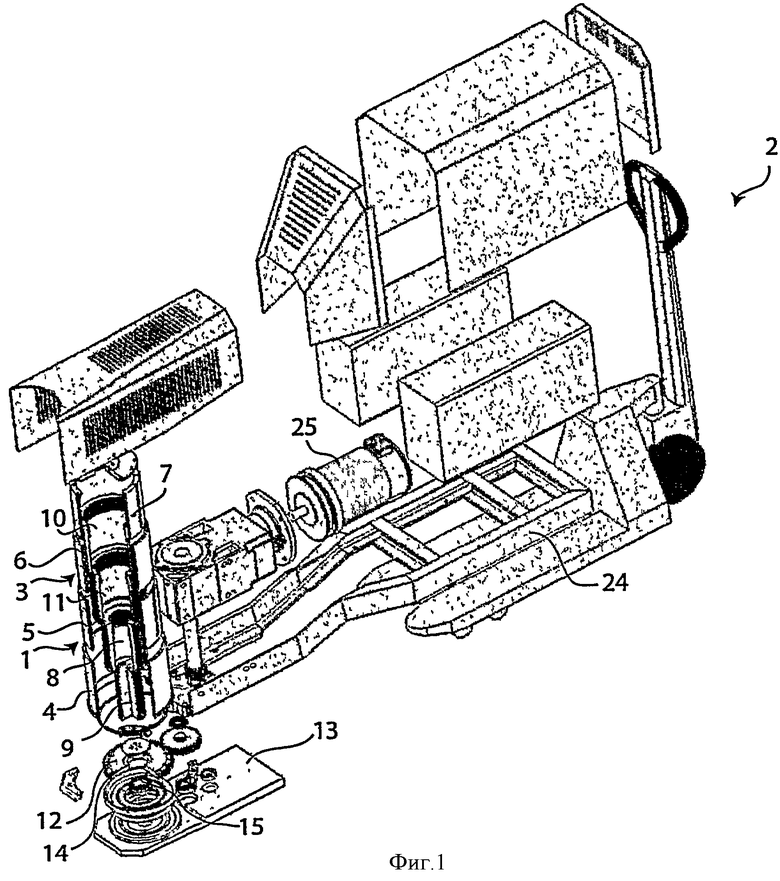
фиг.1 - пространственный разнесенный вид первого варианта осуществления электромеханического подъемного устройства в соответствии с изобретением;
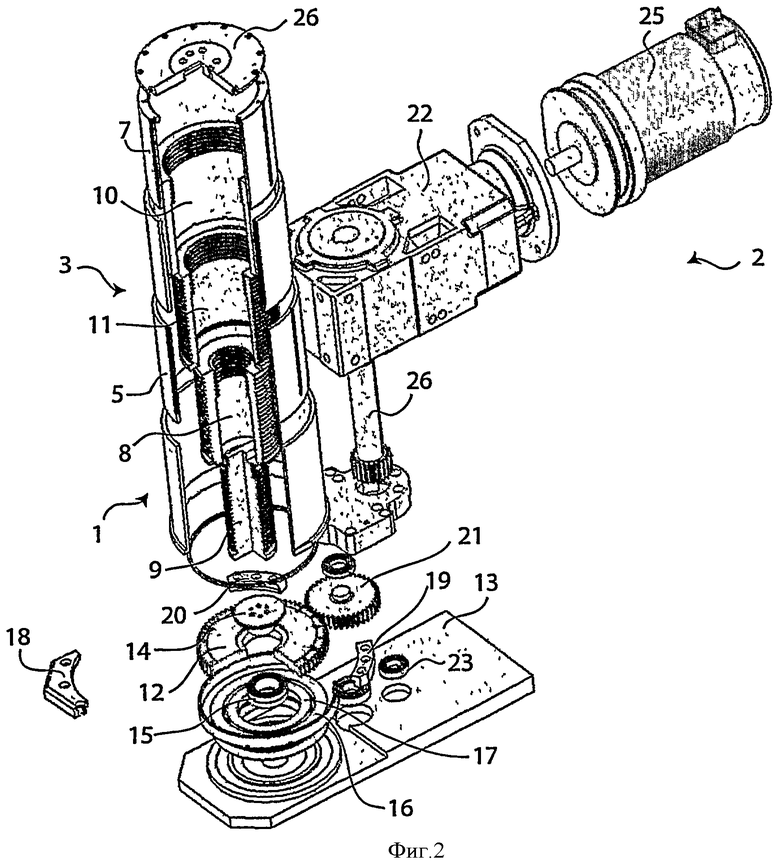
фиг.2 - пространственный разнесенный вид части электромеханического подъемного устройства в соответствии с фиг.1;
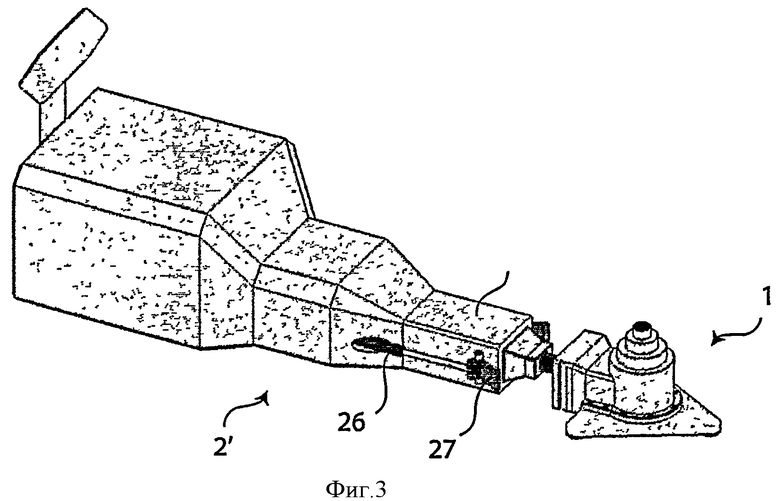
фиг.3 - пространственный разнесенный вид второго варианта осуществления электромеханического подъемного устройства в соответствии с изобретением;
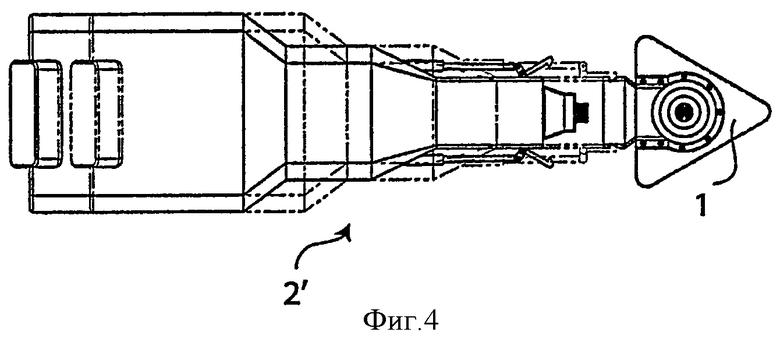
фиг.4 - вид сверху электромеханического подъемного устройства в соответствии с фиг.3;
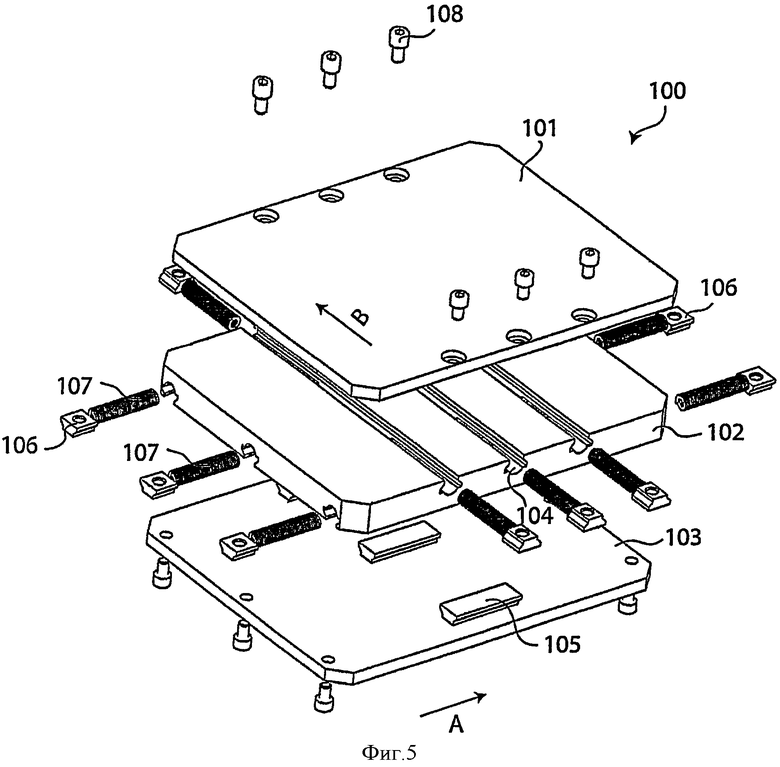
фиг.5 - пространственный разнесенный вид дополнительной части электромеханического подъемного устройства в соответствии с изобретением;
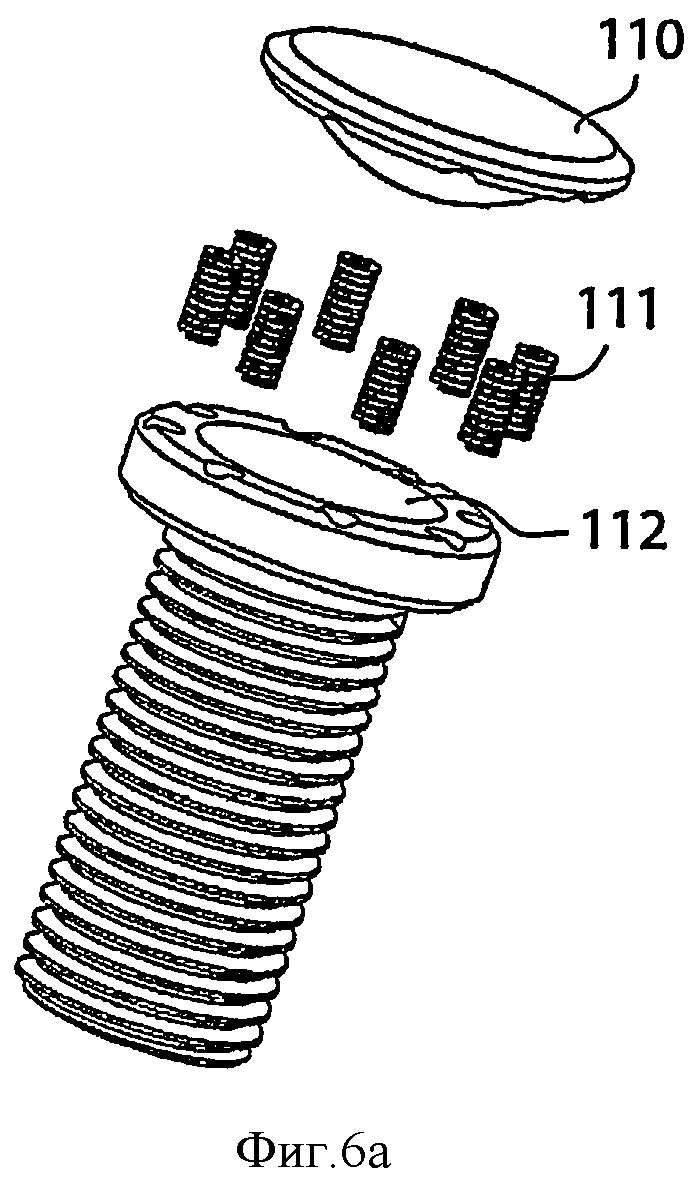
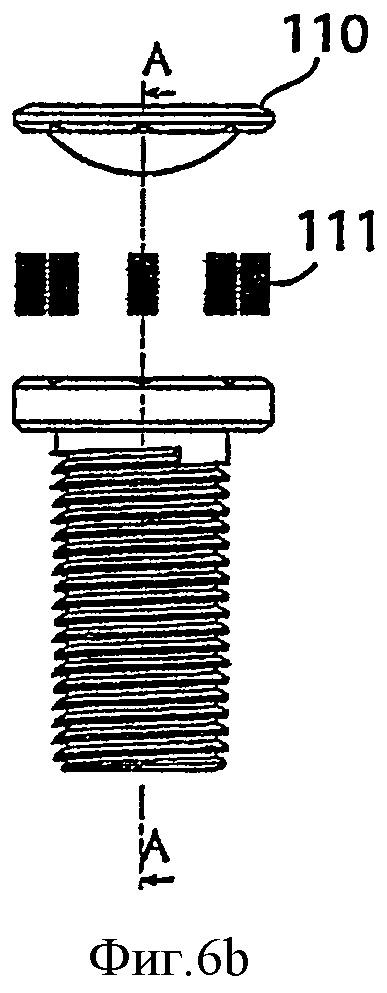
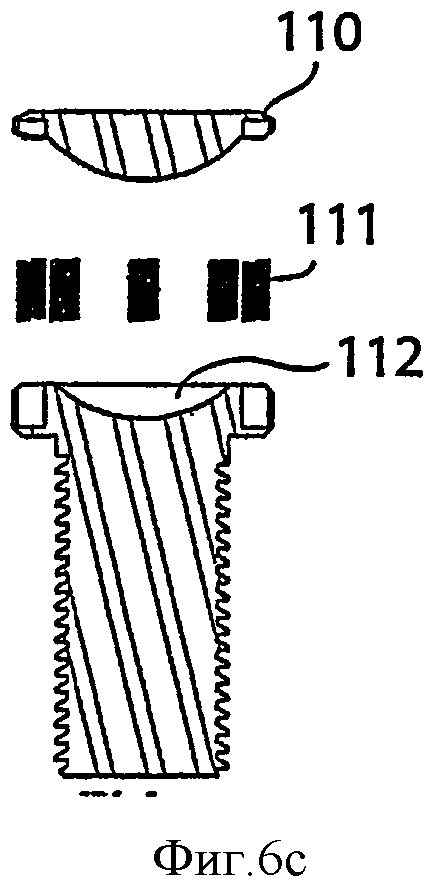
фиг.6a, 6b и 6c - соответственно пространственный вид, вид спереди и разнесенный вид в разрезе еще одной дополнительной части электромеханического подъемного устройства в соответствии с изобретением;
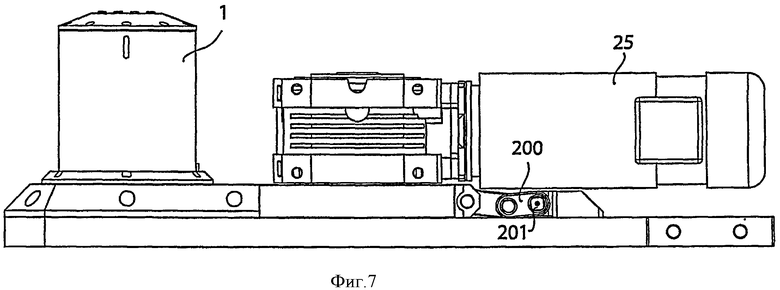
фиг.7 - вид сбоку второго варианта осуществления устройства в соответствии с изобретением;
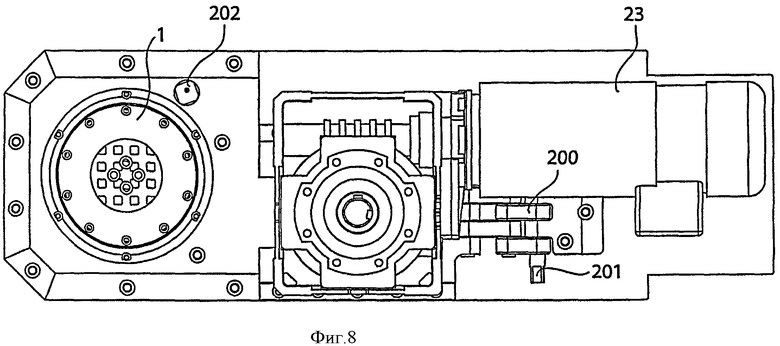
фиг.8 - вид в плане устройства фиг.7;
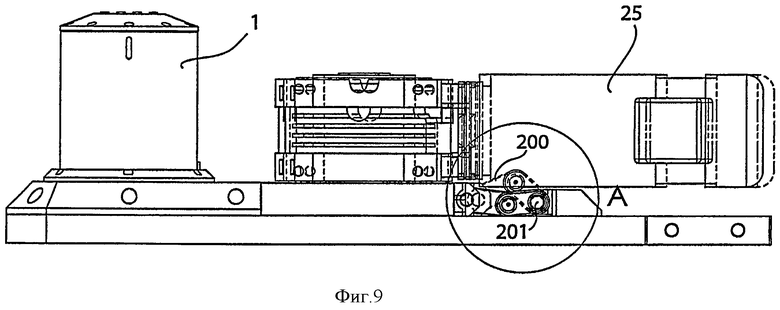
фиг.9 - второй вид в плане устройства фиг.7;
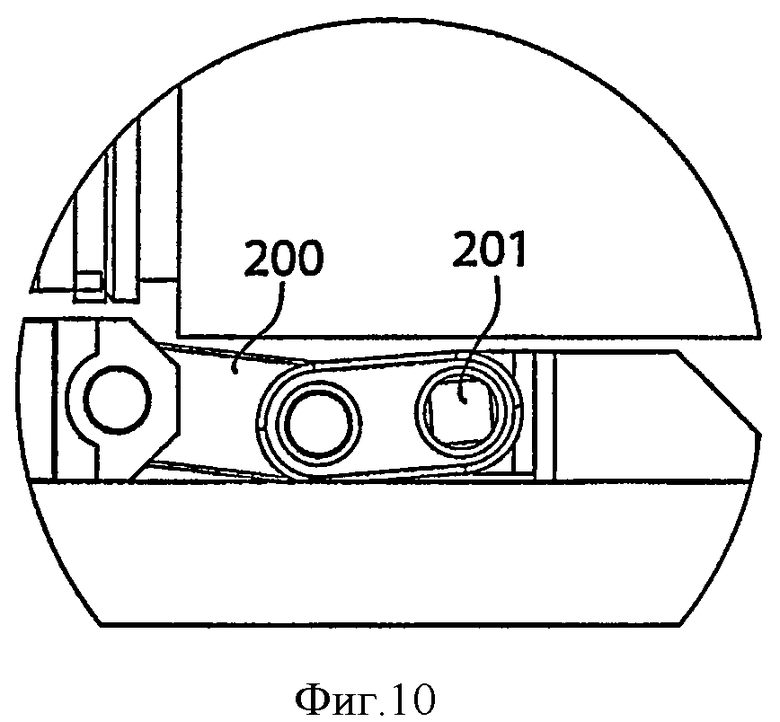
фиг.10 - выносной вид A фиг.9;
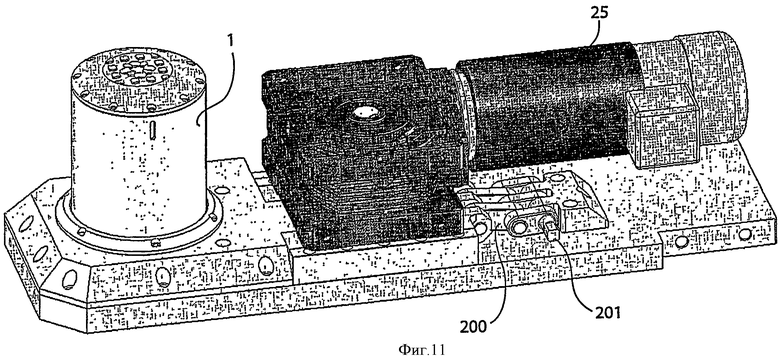
фиг.11 - первый пространственный вид устройства фиг.7;
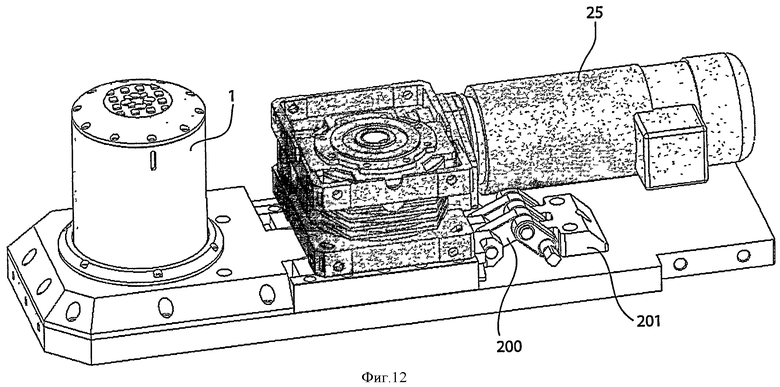
фиг.12 - второй пространственный вид устройства фиг.7;
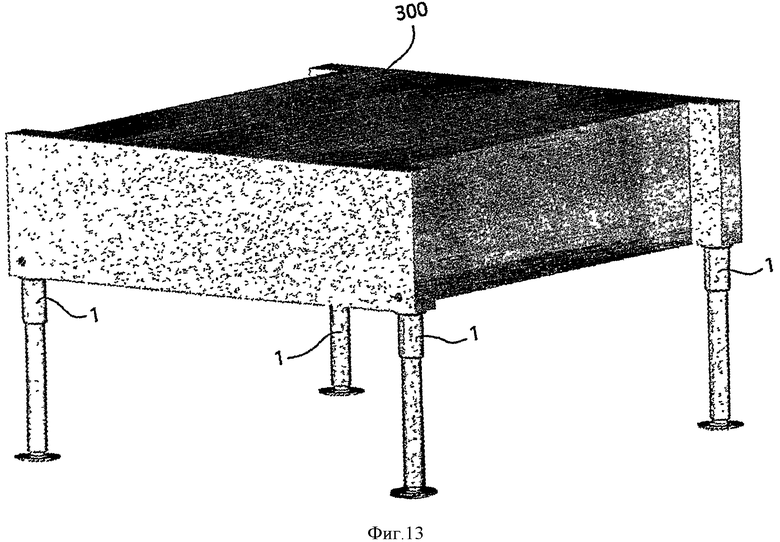
фиг.13 - схематический вид еще одного варианта применения подъемного устройства в соответствии с изобретением;
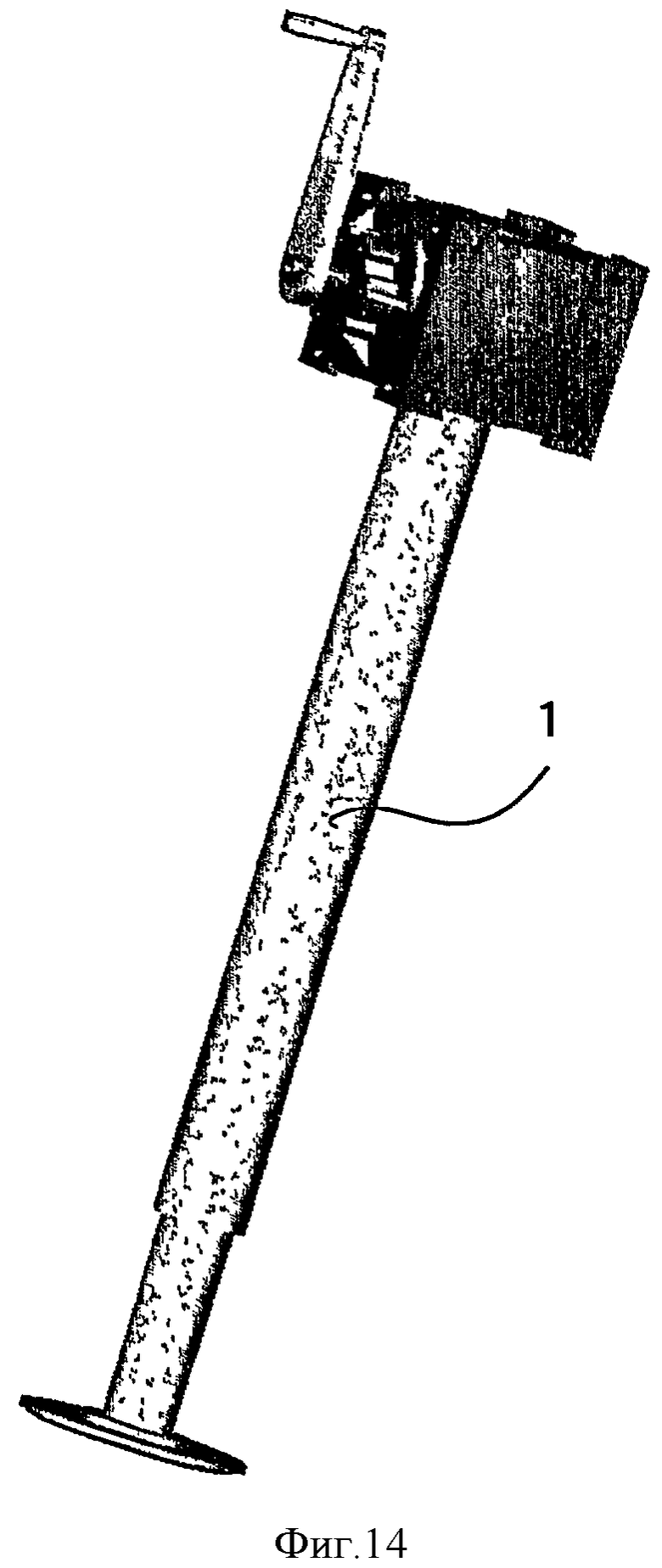
фиг.14 - отдельный подъемный элемент системы, показанной на фиг.13;
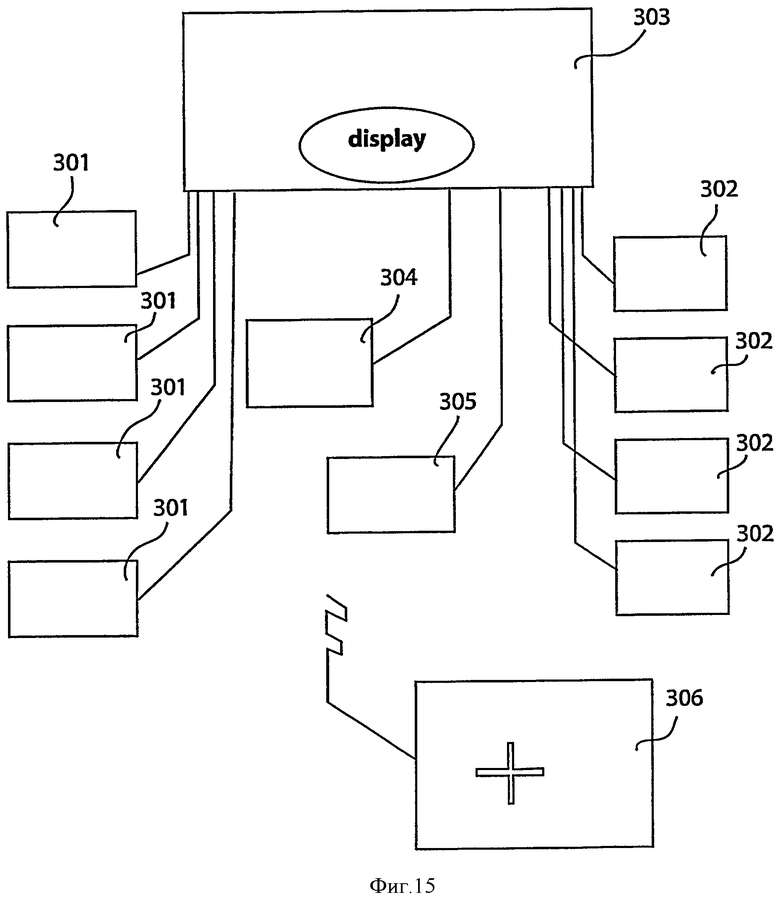
фиг.15 - блок схема управления системой, показанной на фиг.13.
Осуществление изобретения
На фиг.1 и 2 прилагаемых чертежей показан первый вариант осуществления электромеханического устройства в соответствии с изобретением, состоящего из подъемного верхнего элемента, в сборе обозначенного цифрой 1, и тележки для его направления и перемещения, в целом обозначенной цифрой 2.
Устройство 1 в соответствии с изобретением разработано для обеспечения подъема очень тяжелых объектов.
Подъемный элемент состоит из телескопического цилиндра, обозначенного в сборе цифрой 3, образованного винтовой системой типа "винт-гайка", приводимой от электрического двигателя, подсоединенного к аккумулятору, более подробное описание конструкции которого приводится далее. Устройство 1 может перемещаться на снабженной колесами опоре или тележке 2.
Устройство 1 в соответствии с изобретением снабжено телескопическим цилиндром 3, образованным четырьмя стальными внешними кожухами 4, 5, 6, 7, внутри которых расположен телескопический винт, причем указанный винт состоит из четырех резьбовых секторов 8, 9, 10, 11.
Зубчатое колесо 12, выполненное за одно целое с цилиндром 3, установлено внутри базовой опоры 13 на штифте 14 и подшипнике 15. Опорные втулки 16, 17 установлены на базовой опоре 13 и воспринимают осевые нагрузки.
Внешний кожух 4 закреплен на базовой опоре при помощи пластин 18, 19, 20.
Зубчатое колесо 12 находится в зацеплении с паразитной шестерней 21, приводимой в движение валом редуктора 22, связанным с базовой опорой или пластиной 13 через подшипник 23 и чугунную раму 24. Редуктор 22 приводится от электромотора 24.
В первом состоянии устройства 1 в соответствии с изобретением кожухи 5, 6, 7 и винты 8, 9, 10, 11 расположены внутри внешнего кожуха 4.
Устройство находится в таком положении, что крышка 26 расположена под нагружаемым или поднимаемым объектом. К электродвигателю 25, приводящему редуктор 22, подается электропитание, указанный редуктор через вал 26 приводит в движение паразитную шестерню 21, в результате чего вызывается вращение зубчатого колеса 12 в основании телескопического подъемного устройства.
Цилиндр 3, выполненный заодно с зубчатым колесом 12, начинает вращаться, приводя во вращение цилиндры 11, 8 и винт 9; фиксация кожухов 5, 6, 7 от относительного вращения осуществляется при помощи продольных шпонок. Крышка 26, закрепленная на кожухе 7, удерживает винт 9 от вращения, вызывая перемещение указанного винта 9 вперед относительно цилиндра 8 и, следовательно, вызывая выдвижение кожуха 7; после достижения винтом 9 края упора винтовой гайки в виде частичного выступа, образованного внутренней резьбой винтовой гайки 8, начинается его перемещение вперед относительно цилиндра 11, вызывающее выдвижение кожуха 6.
Аналогичным образом с использованием выступов, выполненных внутри цилиндров 9, 10, осуществляется выдвижение кожуха 5 и телескопический цилиндр 2 приводится в максимально выдвинутое положение.
Проводимое должным образом обслуживание и смазка подвижных элементов гарантируют надежную работу устройства.
На фиг.3 и 4 показан второй вариант осуществления устройства в соответствии с изобретением, особенно подходящий для использования в устройствах малого размера.
В этом случае также имеется подъемный верхний элемент 1, элементы которого в основном аналогичны элементам подъемного элемента предыдущего варианта осуществления изобретения, в связи с чем их описание не приводится, а также тележку 2'.
Существенным отличием от предыдущего варианта осуществления изобретения является то, что тележка 2 может подсоединяться к верхнему элементу 1 и отсоединяться от него. Передача движения в данном варианте осуществления производится вдоль вертикальной оси.
На тележке 2' установлен электродвигатель 25 и редуктор 22, а сама тележка соединяется с верхним элементом посредством полости с фасками, обеспечивающей идеальное центрирование, благодаря чему трансмиссионный вал правильно входит в зацепление с верхним элементом и, таким образом, осуществляет передачу движения.
Привод передает движение через шток 28 крюкам 27, а указанные крюки открываются и закрываются, соединяясь с верхним элементом 1 для его перемещения.
Кроме того, центрирование тележки 2' относительно верхнего элемента 1 может осуществляться с использованием точек, фиксируемых лазером.
На фиг.5 изображена пластина, обозначенная в сборе цифрой 100, состоящая из трех различных элементов 101, 102, 102, снабженных соединениями 104, 105 типа "ласточкин хвост", обеспечивающими их скольжение в направлении стрелок A и B.
Пружины 106 обеспечивают центрирование элементов 101 и 103 относительно элемента 102, позволяя им перемещаться в продольном и поперечном направлениях.
Данная система может устанавливаться под верхним элементом 1 или под всей конструкцией тележки 2 устройства в соответствии с изобретением.
На фиг.6 показан конкретный вариант осуществления центральной части первого винта 9, описанного со ссылками на фиг.1 и 2.
В данном случае имеется крышка 110, связанная с винтом 9 при помощи пружин 111, причем указанная крышка помещена внутри проточки. Такое техническое решение позволяет осуществлять отклонение крышки 110 относительно плоскости расположения каждого поднимаемого объекта.
В частности, в конструкции имеется кривошипный элемент 200, позволяющий осуществлять поступательное перемещение электродвигателя относительно подъемного верхнего элемента 1 в два соответствующих положения, показных на фиг.7, 11 и 9, 12.
В случае аварийного отключения питания для отсоединения электродвигателя достаточно воздействовать на шип 201. В данном положении (показанном на фиг.9 и 12) можно воздействовать на ручной управляющий элемент 202 (при помощи соответствующего инструмента) для воздействия на устройство 1 и обеспечения легкого опускания и/или подъема при любых условиях.
Как уже было упомянуто, устройство в соответствии с настоящим изобретением может включать в себя качающийся верхний элемент, компенсирующий угловые отклонения самолета на подвесках.
Кроме того, устройство может быть объединено с самовыравнивающейся системой, включающей в себя электромеханические опоры, работающие синхронным образом и управляемые электронным уровнем, расположенным внутри подъемного устройства.
На фиг.13-15 прилагаемых чертежей показано применение подъемного устройства в соответствии с изобретением для поднятия сложного объекта, в данном случае - навеса 300, но таким же образом может подниматься и любой другой объект, требующий более одной точки подъема.
В данном случае задействованы четыре подъемных устройства 1 в соответствии с изобретением, которые могут быть как устройствами с ручным приводом, так и устройствами, приводимыми от электродвигателей.
В данном случае может использоваться централизованная система управления типа показанной на фиг.15, включающая в себя электродвигатель 301 и датчик нагрузки 302 для каждого подъемного устройства 1, соединенные с центральным блоком 303 управления, указанный центральный блок 303 управления может включать в себя датчики угловых отклонений 304 и центральный управляющий элемент 305.
Таким образом, возможно осуществление подъема навеса 300 (или другого объекта, поднимаемого с использованием более чем одного подъемного устройства 1) при постоянном поддержании равновесия посредством нескольких устройств 1.
При поднятии с использованием ручного привода может использоваться модуль 306 визуализации положения центра масс (см. фиг.14).
Из предыдущего описания видно, что устройство в соответствии с настоящим изобретением является полностью автоматическим и представляет собой устройство, которое позволяет при помощи одного оператора осуществлять операции подъема/опускания, выравнивания или вывешивания в кратчайшие сроки и с высокой точностью. Вся работа может выполняться оператором, находящимся в совершенно безопасном месте. Кроме того, устройство в соответствии с изобретением может использоваться как элемент в подъемных системах, разработанных для других целей, снабженных системой отображения неисправностей, системой глобального позиционирования (GPS), системой контроля (GSM) и автоматической системой проведения регламентных работ.
Подъемное устройство в соответствии с изобретением может оборудоваться ксеноновым осветительным элементом или осветительным элементом другого типа, осветительной системой, позволяющей осуществлять работу в ночное время, лазерной системой наведения для идеального центрирования относительно самолета.
Оно также может оборудоваться взрывозащитными электродвигателями для обеспечения полной безопасности при выполнении операций подъема и опускания самолетов.
Описание настоящего изобретения приведено в иллюстративных и неограничительных целях в соответствии с его предпочтительными вариантами осуществления, однако следует понимать, что специалистами в данной области техники могут создаваться модификации и/или вноситься изменения, не выходящие за рамки соответствующего объема изобретения, определенного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ВЫГРУЗКИ И ПОГРУЗКИ ГРУЗОСОДЕРЖАЩИХ МОДУЛЕЙ ИЗ ОТКРЫТЫХ ГРУЗОВЫХ ПЛАТФОРМ И НА ПЛАТФОРМЫ | 2009 |
|
RU2508214C2 |
| МАШИНА ДЛЯ ЗАГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2011 |
|
RU2495508C1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2017 |
|
RU2657231C1 |
| РЕТРАКТОР | 2009 |
|
RU2497460C9 |
| МНОГОПОЛЮСНЫЙ БЛОК ПРЕРЫВАТЕЛЕЙ, СПОСОБ РАБОТЫ РАСПРЕДЕЛИТЕЛЬНОЙ СИСТЕМЫ И РАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2260890C2 |
| МЕХАНИЗМ ДЛЯ УСТАНОВКИ ДВЕРИ ИЛИ ДРУГОГО АНАЛОГИЧНОГО ЗАКРЫВАЮЩЕГО УСТРОЙСТВА С ВРАЩАТЕЛЬНЫМ И ПОСТУПАТЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ | 2010 |
|
RU2539674C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2620454C2 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО | 2011 |
|
RU2461923C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПАНИГАЧЧИ | 2016 |
|
RU2725905C2 |
| ВАННЫЙ ПОДЪЕМНИК | 1965 |
|
SU171993A1 |
Изобретение относится к электромеханическим грузоподъемным средствам. Предложенное устройство содержит подъемный верхний элемент и тележку для его направления и позиционирования. Указанный подъемный верхний элемент включает в себя вертикальный телескопический цилиндрический элемент, образованный множеством внешних телескопических корпусных элементов и соответствующим числом внутренних телескопических резьбовых элементов. Имеется элемент для подсоединения к поднимаемому объекту, расположенный под верхним корпусным элементом. Верхний элемент нижнего внутреннего резьбового элемента соединен с указанным элементом для подсоединения к поднимаемому объекту. Промежуточный(ые) резьбовой(ые) элемент(ы) снабжен(ны) внешней и внутренней резьбой, а нижний внутренний резьбовой элемент имеет резьбу только на внешней поверхности. Соединение между указанными корпусными элементами выполнено таким образом, что исключается передача вращения между соседними элементами. Предложенное устройство позволяет осуществлять точный и безопасный подъем с самоторможением. При этом оператор находится в безопасном месте. 14 з.п. ф-лы, 15 ил.
1. Устройство (1) подъемное электромеханическое, содержащее подъемный верхний элемент и тележку (2) для направления и установки, указанный подъемный верхний элемент включает в себя существенно вертикальный телескопический цилиндрический элемент, образованный множеством внешних телескопических корпусных элементов (4, 5, 6, 7), элемент (26) для подсоединения к поднимаемому объекту, устанавливающийся над верхним корпусным элементом (7), отличающееся тем, что соответствующие внутренние телескопические резьбовые элементы (8, 9, 10, 11) устанавливаются для каждого внешнего телескопического корпусного элемента (4, 5, 6, 7), верхний элемент нижнего внутреннего телескопического резьбового элемента (9) соединяется с указанным элементом (26) для подсоединения к поднимаемому объекту, промежуточный(ые) резьбовой(ые) элемент(ы) (8, 11) снабжается(ются) внешней и частичной внутренней резьбой, в то время как нижний внутренний резьбовой элемент (9) имеет резьбу только на внешней поверхности, соединения между указанными корпусными элементами (4, 5, 6, 7) снабжаются приспособлениями, предотвращающими передачу вращения между элементами,
при приведении указанного устройства (1) в действие и условии, что передача вращения между элементами (4, 5, 6, 7) предотвращается указанными предотвращающими приспособлениями, работа начинается из положения, когда элемент (26) находится под поднимаемым объектом и указанными корпусными элементами (4, 5, 6, 7) и резьбовыми элементами (8, 9, 10, 11) внутри корпусного элемента (4),
указанный элемент (26), соединенный с корпусным элементом (7), предотвращающий вращение указанного резьбового элемента (9), вызывает его смещение в сторону резьбового элемента (8), при этом вызывая извлечение указанного корпусного элемента (7), когда указанный резьбовой элемент (9) заканчивает свой ход, внутренняя резьба резьбового элемента (8) вызывает его движение по отношению к резьбовому элементу (11), вызывая извлечение указанного корпусного элемента (6) и вызывая приведение в действие указанного устройства (1), аналогичный эффект получается с резьбовыми элементами (9, 10), таким образом получая извлечение указанного корпусного элемента (5), до тех пор, пока не достигается максимальное растяжение указанного устройства (1).
2. Устройство по п.1, отличающееся тем, что указанная тележка соединяется с указанным подъемным верхним элементом с помощью фиксированного или разъемного соединения.
3. Устройство по любому из пп.1 и 2, отличающееся тем, что на указанной тележке установлены электродвигатель, редуктор и зубчатые колеса для передачи движения.
4. Устройство по п.1, отличающееся тем, что передача поднимающего перемещения к указанному верхнему элементу осуществляется вдоль горизонтальной оси или вдоль вертикальной оси.
5. Устройство по п.1, отличающееся тем, что под указанным верхним элементом устанавливается компенсационная пластина для компенсации перемещений в плоскости при подъеме, указанная пластина преимущественно образовывается тремя различными расположенными рядом друг с другом элементами, снабженными соединениями типа "ласточкин хвост ", обеспечивающими их скольжение вдоль осей х, у в опорной плоскости, при этом внутри пазов соединения "ласточкин хвост" имеются пружины, которые при помощи кронштейнов и винтов прикреплены к указанной пластине, указанные винты, кроме того, выполняют функцию соединительных элементов для указанных пластинчатых элементов, указанные пружины обеспечивают центрирование верхнего элемента и нижнего элемента относительно центрального элемента таким образом, что они могут совершать поступательные перемещения в продольном и поперечном направлениях.
6. Устройство по п.1, отличающееся тем, что соединение между указанным соединительным элементом поднимаемого объекта и указанным верхним краем нижнего внутреннего резьбового элемента осуществляется посредством обеспечения углового отклонения указанного соединительного элемента поднимаемого объекта, указанный соединительный элемент поднимаемого объекта образован крышкой, соединенной с верхним краем указанного внутреннего нижнего резьбового элемента при помощи пружин, причем указанная крышка установлена внутри проточки, выполненной в указанном верхнем крае нижнего внутреннего резьбового элемента.
7. Устройство по п.1, отличающееся тем, что в указанном подъемном верхнем элементе имеются датчики нагрузки.
8. Устройство по п.1, отличающееся тем, что указанное устройство снабжено системой индикации неисправностей, системой глобального позиционирования (GPS), системой контроля (GSM) и системой автоматизированного проведения регламентных работ, и тем, что в указанное подъемное устройство встроен ксеноновый осветительный элемент или осветительный элемент другого типа, устройство снабжено осветительной системой, обеспечивающей работу в ночное время, системой лазерного наведения для идеального центрирования устройства под поднимаемым объектом.
9. Устройство по п.1, отличающееся тем, что указанное устройство выполнено с ведущим колесом или моторизованной тележкой с электрическими направляющими и специальными колесами и/или оно снабжено взрывозащищенными электродвигателями.
10. Устройство по п.1, отличающееся тем, что взаимодействие между подъемными устройствами и уровнем осуществляется через кабель, по каналу беспроводной связи стандарта Bluetooth, по радиоканалу.
11. Устройство по п.1, отличающееся тем, что оно оборудовано системой ручного отсоединения электродвигателя, преимущественно указанная система ручного отсоединения электродвигателя снабжена направляющей, на которой установлен электродвигатель, управляется кривошипным элементом, обеспечивающим поступательное перемещение электродвигателя относительно подъемного верхнего элемента в два положения, соответственно включенное положение и отключенное положение, а также ручным управляющим элементом, позволяющим посредством прямого воздействия на устройство легко осуществлять опускание и/или подъем при любых условиях.
12. Устройство по п.1, отличающееся тем, что оно снабжено множеством подъемных устройств, каждое из которых осуществляет воздействие в определенной точке, указанные устройства являются подъемными устройствами с ручным приводом или управляются электродвигателями, преимущественно указанное устройство снабжается централизованной системой управления, причем указанная система включает в себя электродвигатель и датчик нагрузки для каждого подъемного устройства, подсоединенные к центральному блоку управления, причем указанный центральный блок управления еще снабжен датчиками угловых отклонений.
13. Устройство по п.1, отличающееся тем, что каждое подъемное устройство снабжено модулем визуализации положения центра масс.
14. Устройство по любому из пп.11-13, отличающееся тем, что указанное множество устройств взаимодействует с центральным блоком через кабель, по каналу беспроводной связи стандарта Wi-Fi или по каналу беспроводной связи стандарта Bluetooth.
15. Устройство по п.1, отличающееся тем, что оно снабжено системой перемещения положения центра масс в режиме реального времени с ручным дистанционным управлением для оператора в составе приспособления для выбора поднимаемого изделия, такого как навес, самолет, корабль, позволяющей оператору выбирать изделие, поддерживая приспособление в равновесии.
| ЕР 1334947 А2, 13.08.2003 | |||
| DE 8515755 U1, 28.11.1985 | |||
| 0 |
|
SU307859A1 | |
| Телескопический подъемник | 1988 |
|
SU1553515A1 |

