Настоящее изобретение относится к способам и устройствам для выгрузки грузосодержащих модулей из открытых грузовых платформ и погрузки их на открытые грузовые платформы.
При современном уровне развития техники в грузосодержащих модулях перевозятся продукты самых различных типов, например контейнеры, которые оснащены восемью подъемными узлами в стандартных местах по вершинам параллелепипеда. Эти грузосодержащие модули транспортируются на соответствующих судах, а затем переносятся на поезда и пневмоколесные транспортные средства.
Хотя грузосодержащие модули могут быть легко выгружены с грузовиков и пневмоколесных транспортных средств и погружены на них подъемным краном, например мостовым подъемным краном, их выгрузке с открытых грузовых платформ и их погрузке на открытые грузовые платформы препятствует линия электросети, подающая электроэнергию на локомотив, которая не позволяет подъемному крану производить разгрузочно-погрузочные операции сверху.
Указанная невозможность приводит к необходимости отцепить электровоз от поезда, прицепить к нему дизельный локомотив и отвести поезд в неэлектрифицированную зону временной стоянки железной дороги, где контейнеры загружаются или разгружаются кранами или иным оборудованием, которое не могло бы работать в присутствии линии электросети.
Для решения этой проблемы в ЕР 1476341 описывается устройство, содержащее средство для горизонтального перемещения груза в различных направлениях, обычно используя валки, ремни, ролики или цепи.
В США 4093084А описана установка для горизонтального перемещения контейнеров от открытой грузовой платформы или к ней. Перемещение выполняется валками, расположенными как на грузовых автомобилях, так и не открытых грузовых платформах.
В FR 2649948А описана транспортировочная установка, содержащая ящики, подобные грузосодержащим модулям, на которых установлены тележки. Ящики передвигаются горизонтально на колесах или с помощью зубчатых реек, установленных как на открытых грузовых платформах, так и на полу кузова грузовика.
В DE 4301019А описана загрузочно-погрузочная установка для поездов, содержащая панели, предназначенные для погрузки на платформы, для чего их следует перемещать на платформы в поперечном направлении, а затем запирать. Изобретение содержит, кроме того, мостовые устройства, позволяющие панелям преодолевать пространство между грузовиком и платформой.
Эти устройства, а также способы погрузки на открытые грузовые платформы и выгрузки из них исполняются модификацией открытых грузовых платформ, например, введением в них валков с продольными осями, предназначенными для обеспечения возможности горизонтального перемещения контейнеров. Эти решения, однако, трудно реализовать, поскольку традиционные контейнеры выполняются не для установки на землю, а исключительно на четыре нижних подъемных узла (узлы основания) или для их зацепления за четыре верхних подъемных узла, при этом они могут не выдержать свой вес в загруженном состоянии. Кроме того, модификация открытых грузовых платформ и контейнеров чрезвычайно дорога и приводит к потере гибкости.
Задачей настоящего изобретения поэтому является создание системы и способа, которые позволяют устранить упомянутые недостатки, причем особенной задачей является создание системы и способа для выгрузки и погрузки грузосодержащих модулей, оснащенных подъемными узлами, с открытых грузовых платформ и на открытые грузовые платформы, предназначенные для движения по рельсовому пути, над которым проходит линия электросети.
Другой задачей настоящего изобретения является ускорение выгрузки и погрузки грузосодержащих модулей с открытых грузовых платформ и на открытые грузовые платформы без необходимости отвода их от упомянутого рельсового пути, над которым проходит линия электросети.
Указанные задачи достигаются системой и способом, признаки которых указаны в пунктах формулы изобретения.
Настоящее изобретение будет более понятным из нижеследующего его подробного описания, приведенного с использованием не носящего ограничительный характер приема одного из вариантов его осуществления с сопроводительными иллюстрациями, на которых:
фиг.1-6 представляют собой виды в перспективе, показывающие последовательность, связанную с разгрузкой грузосодержащего модуля с открытой грузовой платформы.
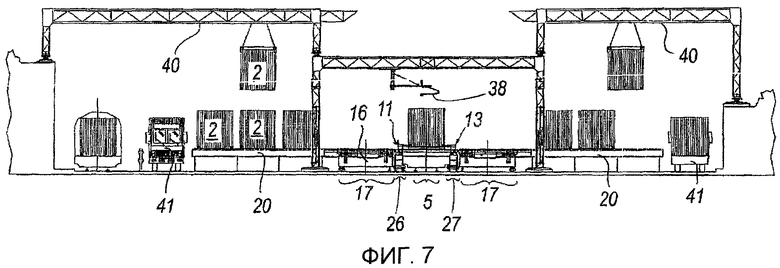
Фиг.7 представляет собой сечение системы по настоящему изобретению.
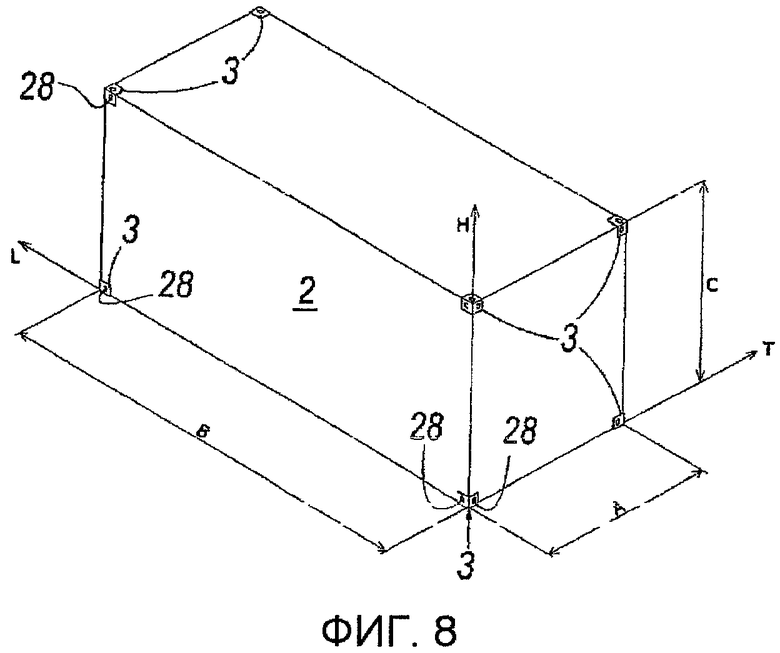
Фиг.8 показывает схему расположения подъемных узлов типичного грузосодержащего модуля.
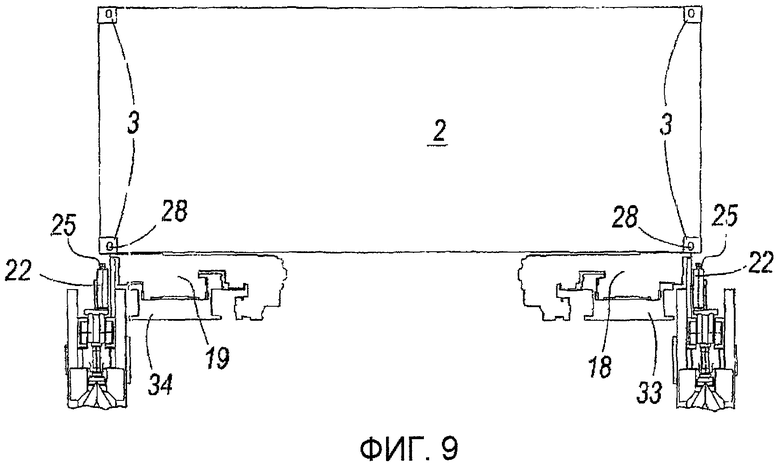
Фиг.9 показывает грузосодержащий модуль, установленный на перегрузочные тележки.
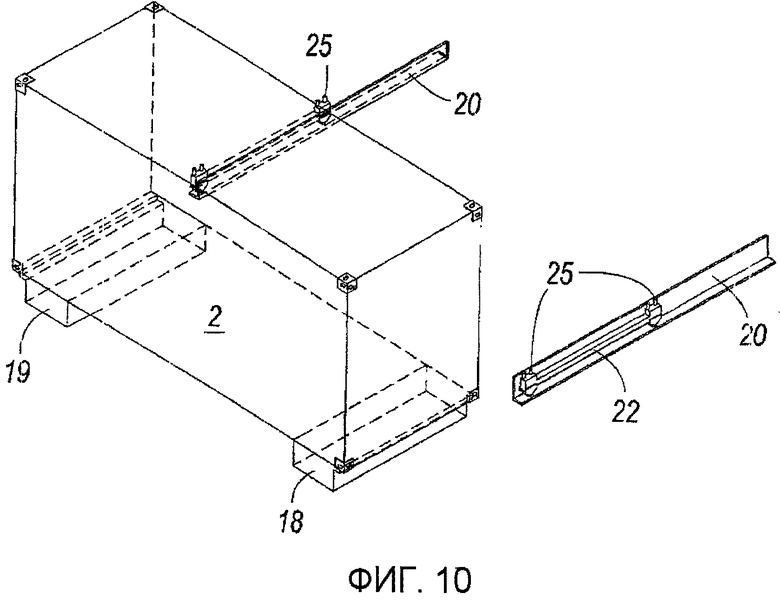
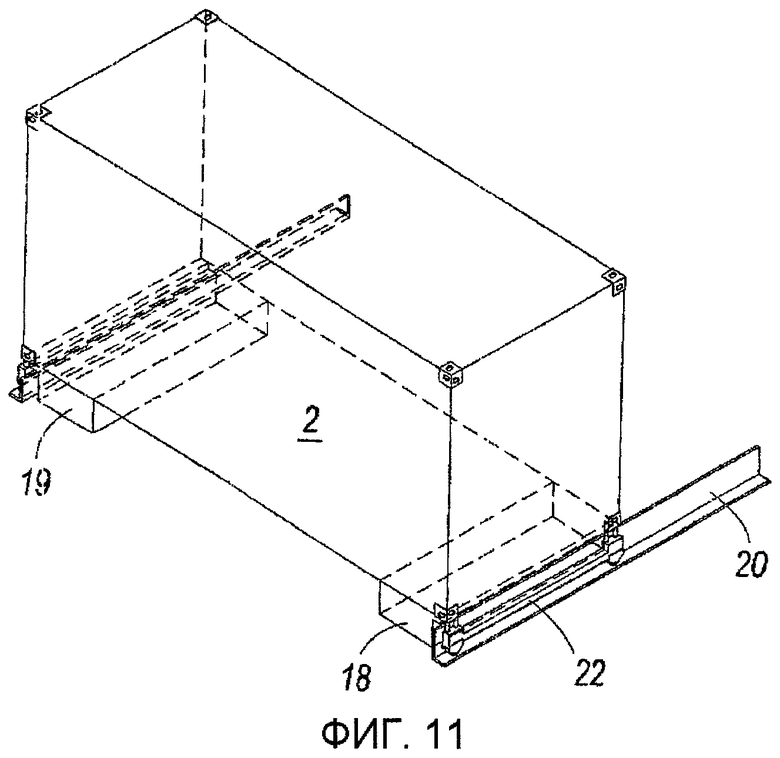
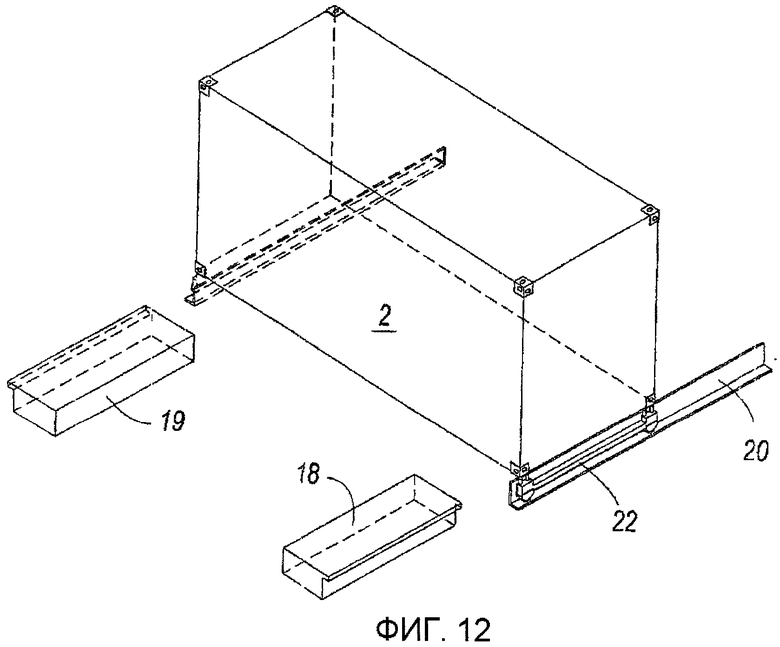
Фиг.10-12 показывают часть процесса перемещения грузосодержащих модулей 2.
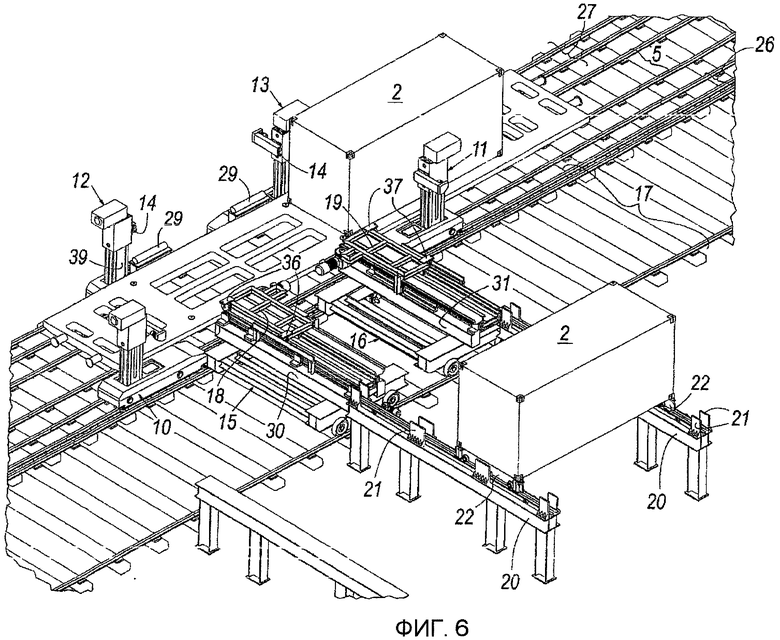
На фиг.1-6 показана открытая грузовая платформа 4, установленная с возможностью перемещения по основному рельсовому пути 5 вдоль оси 6 продольного перемещения, показанной по существу по центру основного рельсового пути 5. На фиг.1 открытая грузовая платформа 4 прибывает на станцию, где расположенные на платформе грузосодержащие модули 2 должны выгружаться и устанавливаться на платформу 20, находящуюся в режиме ожидания, с которой они снимаются краном или иным средством и устанавливаются, например, на пневмоколесное транспортное средство для интенсивного распределения товаров. Грузосодержащие модули могут быть либо обычными контейнерами, которые, в основном, выпускаются двух различных размеров (длиной в 20 и в 40 футов), либо открытыми или закрытыми подвижными ящиками, определяющими объем, внутри которого помещены товары. Каждый из этих грузосодержащих модулей имеет восемь подъемных узлов 3, расположенных в вершинах параллелепипеда со сторонами заданной длины: четыре верхних узла (лежащих в плоскости, параллельной плоскости TL и удаленной от нее на расстояние С) и четыре узла основания (лежащих в плоскости TL), причем подъемные узлы определяют поперечное Т (ширина А), продольное L (длина В) и вертикальное Н (высота С) направления, как показано на фиг.8. Положение, форма и размеры этих подъемных узлов стандартизованы для всех грузосодержащих модулей. Параллелепипеды, в вершинах которых расположены подъемные узлы, имеют, в основном, два размера, причем их большая сторона (длина В) имеет 20 или 40 футов, хотя существуют и другие размеры. Настоящее изобретение может быть применимо к грузосодержащим модулям любой длины, включая нестандартные, оснащенные подъемными узлами. Эти подъемные узлы 3 имеют по три свободные поверхности, каждая из которых перпендикулярна к двум другим, которые образуют вершины параллелепипеда. Все три свободные поверхности имеют также соединительные отверстия 28, имеющие стандартные положения и размеры, предназначенные для подцепления и подъема, например, краном.
Система по настоящему изобретению содержит два вспомогательных рельсовых пути 26 и 27, расположенные по двум сторонам от основного рельсового пути 5, один - справа и один - слева, и идущие, по меньшей мере, в своей части, параллельно основному рельсовому пути 5; четыре подъемных элемента 10-13, расположенные по бокам грузосодержащих модулей 2 на противоположных сторонах относительно основного рельсового пути 5, причем два из них - 10 и 11 - перемещаются по вспомогательному рельсовому пути 26, а два других - 12 и 13 - перемещаются по другому вспомогательному рельсовому пути 27. Каждый из подъемных элементов 10-13 содержит подъемный палец 14, имеющий ось S, расположенную горизонтально в плоскости, по существу нормальной к оси S продольного перемещения. Эти подъемные пальцы 14 выполнены с возможностью перемещения в вертикальном направлении по подъемному элементу и скольжения в направлении их оси S, чтобы войти в соединительные отверстия 28 подъемных узлов 3.
Каждый подъемный элемент 10-13 содержит устройство распознавания оптического или иного типа, предназначенное для автоматического распознавания соединительных отверстий 28 подъемных узлов 3 и автоматического позиционирования подъемных элементов 10-13 рядом с подъемными узлами 3 в положении, пригодном для ввода подъемных пальцев 14 в соединительные отверстия 28.
Четыре подъемных элемента 10-13 выполнены с возможностью расположения по бокам открытой грузовой платформы 4, на которой расположен грузосодержащий модуль 2, посредством независимого перемещения для распознавания соединительных отверстий 28 подъемных узлов 3, для ввода подъемных пальцев 14 в соединительные отверстия 28 и для вертикального подъема или переноса грузосодержащего модуля 2 достижением захвата четырех подъемных узлов 3, расположенных парами по противоположным сторонам относительно продольной оси перемещения 6. Операция вертикального переноса грузосодержащего модуля 2 выполняется одновременным скоординированным перемещением подъемных пальцев 14, хотя менее устойчивый захват может быть получен использованием только трех подъемных узлов.
Подъемные элементы 10-13, будучи разделенными друг от друга, перемещаются по противоположным сторонам относительно основного рельсового пути 5, а будучи расположенными полностью за пределами линии, ограничивающей ширину поезда, не мешают перемещению открытой грузовой платформы 4 и не касаются линии электрической сети 38, расположенной над основным рельсовым путем 5 (см. фиг.7).
Можно также иметь только два подъемных элемента, каждый их которых оснащен двумя подъемными пальцами, должным образом разнесенные в горизонтальном направлении, причем эти два подъемных элемента выполнены с возможностью передвижения по разным вспомогательным рельсовым путям 26 и 27 таким образом, чтобы иметь возможность расположения сбоку грузосодержащего модуля 2 по двум противоположным сторонам относительно оси 6 продольного перемещения. Два подъемных элемента являются разделенными между собой в том смысле, что они не соединены вместе каким-либо механическим элементом, находящимся в пространстве над основным рельсовым путем. Однако оба они опираются на землю или возможную общую платформу, расположенную под рельсами основного пути. Но такая конструкция системы наделяет ее меньшей гибкостью, поскольку она была бы либо пригодна только для подъема грузосодержащего модуля одного типа, у которой подъемные узлы расположены в единственной заданной конфигурации, либо потребовала бы большего технологического усложнения подъемных элементов приданием двум подъемным пальцам 14, расположенным на одном и том же подъемном элементе, возможности независимого горизонтального хода, параллельного оси 6 продольного перемещения.
Подъемные элементы могли бы быть также фиксированными, а подъемные пальцы - выставленными относительно подъемных узлов грузосодержащих модулей точным позиционированием открытой грузовой платформы.
Это решение, очевидно, делает данный способ более сложным и не представляет собой предпочтительный вариант осуществления.
Кроме того, подъемные элементы 10-13 могли бы перемещаться горизонтально в направлении, параллельном направлению основного рельсового пути 5, направляемые не вспомогательными рельсовыми путями 26 и 27, а вместо этого направляемые, например, лазерной направляющей системой или иной известной направляющей системой. Следует отметить, что данная система особенно годится для работы на основном рельсовом пути, который является прямолинейным, или имеет радиус кривизны, в соответствии с железнодорожными нормами.
Система по настоящему изобретению содержит также перегрузочный рельсовый путь 17, параллельный основному рельсовому пути 5, расположенный таким образом, чтобы между основным рельсовым путем 5 и перегрузочным рельсовым путем 17 оставался один из двух вспомогательных путей 26. По перегрузочному рельсовому пути 17 независимо перемещаются две перегрузочные тележки 15 и 16, каждая из которых содержит основание 30 и 31 и подвижный мост 33 и 34, имеющий возможность перемещаться в направлении, по существу поперечном относительно основного рельсового пути 5 и параллельного ему перегрузочного рельсового пути 17, то есть по существу горизонтально в плоскости, нормальной к оси 6 продольного перемещения, а также перегрузочные тележки 18 и 19 с возможностью перемещения по основанию 30 и 31 и по подвижному мосту 33 и 34 в направлении, поперечном основному рельсовому пути 5.
Когда грузосодержащий модуль 2 поднят подъемными элементами 10-13, перегрузочные тележки 15 и 16, двигаясь по перегрузочному рельсовому пути 17, располагают сбоку подъемные элементы 10, 11, расположенные на вспомогательном рельсовом пути 26, расположенном между основным рельсовым путем 5 и перегрузочным рельсовым путем 17.
Система по настоящему изобретению содержит опорные элементы 29, неподвижно связанные с подъемными элементами 12 и 13 и расположенные на противоположной стороне относительно стороны перегрузочных тележек 15 и 16 по отношению к основному рельсовому пути 5. Эти опорные элементы предназначены для поддержки одного конца подвижных мостов 33 и 34 на противоположной стороне относительно стороны перегрузочных тележек 15 и 16 по отношению к основному рельсовому пути 5. Перемещение подвижных мостов 33 и 34 имеет достаточную величину хода для того, чтобы один из их концов мог коснуться упомянутых опорных элементов 29 и опереться на них. Таким образом, перегрузочные тележки 18 и 19 вместе со своим грузом, состоящим из грузосодержащего модуля 2, могут скользить по подвижным мостам 33 и 34, которые не выступают, а опираются по обоим концам, внешним относительно груза. По меньшей мере, те подъемные элементы 10 и 11, которые расположены на той же стороне, что и перегрузочные тележки 15 и 16 относительно основного рельсового пути 5, имеют такую форму, которая способствует тому, чтобы подвижные мосты 33 и 34, а также перегрузочные тележки 18 и 19 прошли под их подъемными пальцами 14, то есть внутри области, расположенной вертикально под подъемными пальцами 14.
С этой целью в варианте осуществления, показанном на фиг.1-6, каждый подъемный палец 14 наклонен относительно вертикальной стойки 39 подъемного элемента, установленного на вспомогательных рельсовых путях 26 или 27, оставляя, таким образом, под подъемными пальцами 14 свободное пространство.
Система по настоящему изобретению для каждого из подвижных мостов 33 и 34 содержит, предпочтительно на опорных элементах 29, горизонтирующее устройство, которое может выполнять вертикальное перемещение опирающегося на них конца подвижных мостов 33 и 34 для достижения ими идеально горизонтального положения, чтобы перегрузочные тележки 18 и 19 могли двигаться по ним горизонтально.
Присутствие двух независимых перегрузочных тележек 15 и 16 придает системе большую гибкость, наделяя ее способностью производить погрузку и выгрузку грузосодержащих модулей различных размеров.
Если бы система была оснащена только двумя подъемными элементами, и каждый из них имел бы по два подъемных пальца, то ее гибкость была бы ограниченной, и в этом случае ее можно было бы оборудовать только одной перегрузочной платформой такого размера, который соответствовал бы длине грузосодержащего модуля, для которого данная система была сконструирована.
Перегрузочные тележки 18 и 19 выполнены с возможностью перемещения по подвижным мостам 33 и 34 в направлении, по существу поперечном основному рельсовому пути, причем каждая из них содержит одну или две обращенные вверх опорные поверхности 36 и 37, предназначенные, следовательно, для опоры двух подъемных узлов 3 основания, расположенных в поперечном направлении.
Погрузочная и разгрузочная система по настоящему изобретению, кроме того, содержит, по меньшей мере, одну платформу 20 ожидания с элементами 21, предназначенными для удержания грузосодержащих модулей 2 за подъемные узлы 3 и проходящими в направлении, по существу поперечном основному рельсовому пути, по меньшей мере, на начальном участке со стороны основного рельсового пути 5.
Эти опорные элементы 21 могут содержать, например, направляющие, отстоящие друг от друга так, чтобы на них могли устанавливаться только подъемные узлы 3 или вертикально расположенные плоские элементы. Может быть несколько различных платформ ожидания, способных принимать грузосодержащие модули различной длины, которые имеют подъемные узлы, расположенные в соответствии с длиной грузосодержащих модулей. На каждой платформе 20 ожидания есть две установочные тележки 22, выполненные с возможностью горизонтального перемещения вдоль всей длины платформы 20 ожидания. Они содержат два поршня вертикального перемещения с горизонтальной нагрузочной поверхностью 25 и также имеют возможность вертикального переноса грузосодержащего модуля 2 подъемом нагрузочной поверхности 25 и опирающем ее на внешнюю часть нижней поверхности подъемных узлов 3, в то время как опорные элементы 21 опираются на внутреннюю часть нижней поверхности подъемных узлов 3 или наоборот. Установочные тележки 22 имеют лишь очень небольшое вертикальное перемещение, которого, однако, достаточно для того, чтобы снять грузосодержащий модуль с перегрузочных тележек 18 и 19 и установить их на опорные элементы платформы 20 ожидания.
Ясно также, что в другом варианте осуществления две установочные тележки 22, предназначенные для перемещения по одной платформе ожидания, чтобы переместить один и тот же грузосодержащий модуль при их движении по одной платформе ожидания, могли бы быть заменены лишь одной установочной тележкой.
Платформа 20 ожидания и подвижный мост 18 достигают взаимного проникновения, равного по меньшей мере ширине А грузосодержащего модуля 2 и такого, чтобы перегрузочные тележки 18 и 19 встали по сторонам установочных тележек 22. Платформа 20 ожидания может также поддерживать один конец подвижных мостов 33 и 34, когда эти подвижные мосты 33 и 34 выдвигаются в направлении платформы 20 ожидания для взаимного проникновения с ней. Таким образом, перегрузочные тележки 18 и 19, грузом которых является грузосодержащий модуль 2, могут скользить по подвижным мостам 33 и 34, которые не выступают, а опираются обоими своими концами относительно груза. Для ускорения погрузочно-разгрузочных операций возможно «умножение» элементов системы, например, на противоположных сторонах относительно основного рельсового пути могут быть проложены два перегрузочных рельсовых пути, на каждом из которых могут передвигаться две, четыре или более перегрузочных тележек, как показано на фиг.7. Платформы ожидания могут быть расположены и по обеим сторонам основного пути.
Посредством автоматической системы распознавания подъемных узлов 3 и соединительных отверстий 4 система по настоящему изобретению может быть также использована для работы с грузосодержащими модулями, у которых подъемные узлы 3 расположены не в соответствии с одной из двух вышеописанных конфигураций.
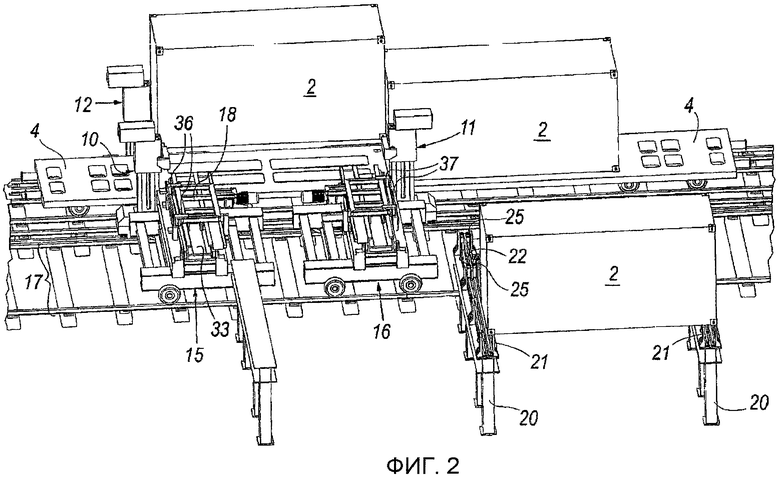
Работа системы может быть понята из фиг.1-6. На фиг.1 показана открытая грузовая платформа 4 с двумя грузосодержащими модулями 2, которая прибывает на станцию, где установлена система выгрузки и погрузки по настоящему изобретению. Четыре подъемных элемента 10-13 при перемещении по вспомогательным путям 26 и 27 определяют с помощью визуальной или иной системы распознавания положения четырех подъемных узлов 3, расположенных на нижнем основании грузосодержащего модуля 2. На вспомогательных путях 26 и 27 расположены подъемные элементы с расположением сбоку от подъемных узлов 3 таким образом, чтобы ввести свои подъемные пальцы 14 в соединительные отверстия 28, расположенные на поперечных сторонах (то есть нормально к поперечному направлению) подъемных узлов 3 основания.
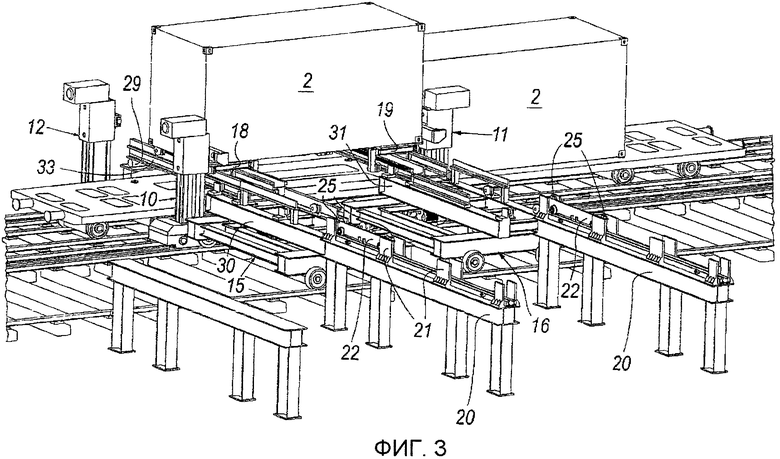
Подъемные элементы 10-13 захватывают подъемные узлы 3 вводом подъемных пальцев 14 в поперечно расположенные соединительные отверстия 28. После этого подъемные элементы 10-13 одновременным перемещением четырех подъемных пальцев 14 вверх поднимают грузосодержащий модуль 2 на предварительно фиксированную высоту, так чтобы не коснуться линии 38 электрической сети, расположенной над основным рельсовым путем 5 (на фиг.1-6 не показана, но показана на фиг.7). Тем временем две перегрузочные тележки 15 и 16 располагаются сбоку подъемных элементов 10 и 11, расположенных с той же стороны от основного рельсового пути 5 (см. фиг.2). На фиг.3 показано, что подвижные мосты 33 и 34 выдвинулись в направлении основного рельсового пути 5 до касания опорных элементов 29, неподвижно связанных с подъемными элементами 12 и 13, расположенных на противоположной стороне относительно основного рельсового пути 5, и опирания на них, пройдя при этом внутри вертикальной области под подъемными пальцами 14. Перегрузочные тележки 18 и 19 перемещаются вдоль подвижных мостов 33 и 34, чтобы войти под грузосодержащий модуль 2.
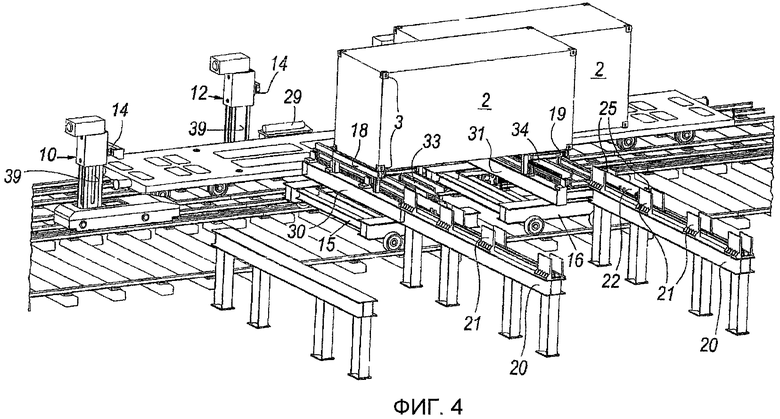
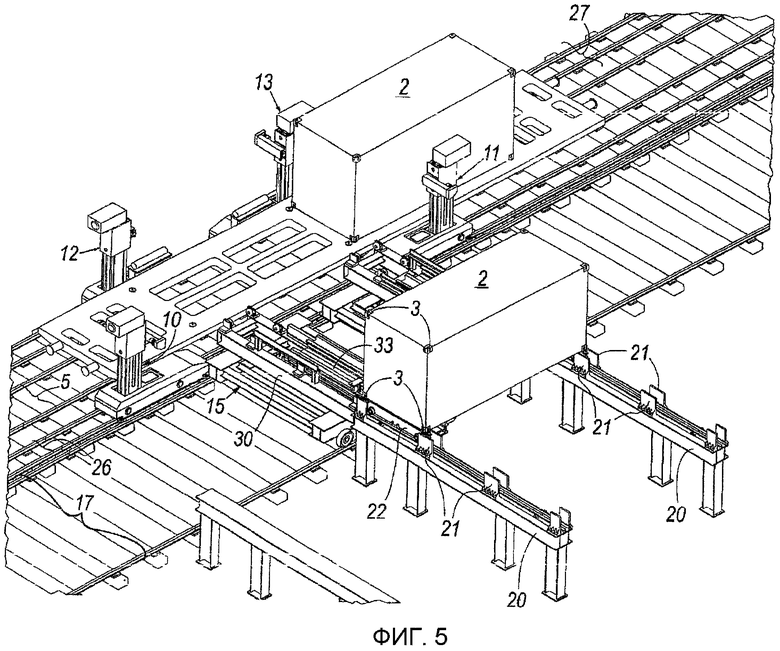
Перегрузочные тележки 15 и 16 расположены таким образом, что те опорные поверхности 36 и 37 перегрузочных тележек 18 и 19, которые обращены вверх, лежат под первой частью нижних поверхностей подъемных узлов 3 основания, то есть на фиг.8 поверхностей, нормальных к вертикальному направлению Н подъемных узлов 3 основания, расположенных в плоскости TL (см. фиг.8). В этом примере опорные поверхности 36 и 37 перегрузочных тележек 18 и 19 расположены под внутренней частью нижних поверхностей подъемных узлов 3 основания. Подъемные элементы 10-13 переносят грузосодержащий модуль 2 вниз и располагают его на опорных поверхностях 36 и 37 перегрузочных тележек 18 и 19. Подъемные пальцы 14 выходят из зацепления с соединительными отверстиями 28, а подъемные элементы 10-13 перемещаются таким образом, чтобы грузосодержащий модуль 2 мог быть перенесен в поперечном направлении на перегрузочные тележки 18 и 19 до расположения его над основаниями 30 и 31 перегрузочных тележек 15 и 16 (см. фиг.4). Перегрузочные тележки 15 и 16 движутся строго вдоль перегрузочного рельсового пути 17, чтобы выровняться с платформой 20 ожидания, на которую необходимо установить грузосодержащий модуль 2.
Подвижные мосты удлиняются в направлении платформы 20 ожидания и проникают в нее на величину, по существу равную ширине А грузосодержащего модуля 2. Концы подвижных мостов 33 и 34 поддерживаются платформой 20 ожидания во избежание образования подвижными мостами какой бы то ни было консольной опоры, когда на них перейдет грузосодержащий модуль 2. Перегрузочные тележки 18 и 19 передвигаются по подвижным мостам и горизонтально перемещают грузосодержащий модуль, пока он не окажется над платформой 20 ожидания (см. фиг.5). По платформе 20 ожидания перемещаются установочные тележки, чтобы расположиться сбоку от перегрузочных тележек 18 и 19, и помещают свою нагрузочную поверхность 25 под внешней частью нижней поверхности подъемных узлов 3 основания, которые устанавливаются внутренней частью своей нижней поверхности на опорные поверхности 36 и 37 перегрузочных тележек 18 и 19 (см. фиг.9). Установочные тележки 22 поднимают свои нагрузочные поверхности 25, чтобы, следовательно, поднять грузосодержащий модуль 2 вертикально вверх и перенести горизонтально, чтобы установить грузосодержащий модуль 2 на опорные элементы 21 (см. фиг.6), которые удерживают грузосодержащий модуль за внутреннюю часть нижней поверхности подъемных узлов 3 основания. В то же время перегрузочные тележки 18 и 19 возвращаются на основания 30 и 31 перегрузочных тележек 15 и 16, а подвижные мосты 33 и 34 также втягиваются назад на основания 30 и 31 перегрузочных тележек 15 и 16. Таким образом, перегрузочные тележки 15 и 16 могут быть переустановлены для выгрузки следующего грузосодержащего модуля. Грузосодержащие модули 2, выровненные на платформах 20 ожидания так, что они не перекрываются линией электросети, могут затем подниматься краном или другими средствами, включая самоходные, например мостовым подъемным краном (см. фиг.7), и переноситься на грузовые автомобили 41. Перенос грузосодержащих модулей с открытых грузовых платформ 4 на платформы 20 ожидания производится автоматически и быстро, без касания линий электросети.
Подвижные мосты при переносе на них грузосодержащего модуля никогда не имеют консольного крепления, но имеют опоры или закреплены по обоим концам относительно находящегося на них груза. Предпочтительно, чтобы на подвижных мостах 33 и 34 также присутствовало горизонтирующее устройство, в том числе и на платформе 20 ожидания, для обеспечения идеально горизонтального перемещения перегрузочных тележек 18 и 19, когда они переходят на подвижные мосты 33 и 34, перенося грузосодержащий модуль 2 с оснований 30 и 31 перегрузочных тележек на платформу 20 ожидания. Такое горизонтирующее устройство для подвижных мостов альтернативно может присутствовать и на перегрузочных тележках 15 и 16 для регулировки высоты расположенных на них концов подвижных мостов 33 и 34.
Открытая грузовая платформа может быть загружена при выполнении операций в обратном порядке, начиная с момента, когда грузосодержащие модули уже установлены на опорных элементах 21 платформы 20 ожидания. Имея в виду, что точной установки грузосодержащих модулей на платформу ожидания с помощью подъемного крана достичь трудно, грузосодержащие модули могли бы устанавливаться на платформу ожидания системой, подобной описанной ранее, содержащей подъемные элементы и перегрузочные тележки для перемещения прибывающих грузосодержащих модулей, которые должны быть загружены на открытую грузовую платформу.
Перегрузочные тележки 18 и 19 могли бы, кроме того, перемещаться и вертикально, когда грузосодержащий модуль переходит от подъемных элементов 10-13 к перегрузочным тележкам или от перегрузочных тележек 18 и 19 к установочным тележкам 22. Такое устройство, однако, было бы более сложным и избыточным по количеству перемещений, поскольку вертикальное перемещение выполняется подъемными элементами над основным рельсовым путем, а установочными тележками 22 - над платформой ожидания.
Таким образом, настоящее изобретение предназначено также для защиты способа выгрузки и погрузки грузосодержащих модулей 2, оснащенных подъемными узлами 3, с открытых грузовых платформ 4 и на открытые грузовые платформы, которые установлены с возможностью передвижения по основному рельсовому пути 5 вдоль оси 6 продольного перемещения, реализуемого системой, подобной вышеописанной, содержащей четыре подъемных элемента 10-13, каждый из которых оснащен подъемным пальцем 14, две перегрузочные тележки 15 и 16, каждая из которых содержит основания 30 и 31, подвижный мост 33 и 34 и перегрузочную тележку 18 и 19 с горизонтальными опорными поверхностями 36 и 37, причем система содержит также, по меньшей мере, одну платформу 20 ожидания с опорными элементами 21, на которых установлены установочные тележки 22 с нагрузочной поверхностью 25.
Способ выгрузки представлен следующими этапами:
а) четыре подъемных элемента 10-13 располагается по бокам грузосодержащего модуля 2, расположенные парами по противоположным сторонам относительно основного рельсового пути 5;
b) четыре подъемных узла 3, не перекрывающие друг друга по вертикали и расположенные попарно по противоположным сторонам относительно оси 6 продольного перемещения, захватываются подъемными элементами 10-13 вводом их подъемных пальцев 14 в соединительные отверстия 28 подъемных узлов 3;
c) посредством подъемных элементов 10-13 грузосодержащий модуль 2 подается вертикально вверх;
d) две перегрузочные тележки 15 и 16 располагается сбоку грузосодержащего модуля 2 с одной стороны основного рельсового пути 5;
e) подвижные мосты 33 и 34 вытягиваются в направлении основного рельсового пути 5 до тех пор, пока их концы не будут опираться на опорные элементы 29, неподвижно связанные с подъемными элементами 12 и 13, расположенными на противоположной стороне, чем перегрузочные тележки 15 и 16 относительно основного рельсового пути 5;
f) перегрузочные тележки 18 и 19 перемещаются по подвижному мосту и располагаются под подъемными узлами 3 основания грузосодержащего модуля 2 таким образом, что подъемные узлы 3 частично выступают относительно вертикали сквозь опорные поверхности 36 и 37, в направлении оси 6 продольного перемещения;
g) грузосодержащий модуль 2 переносится подъемными элементами 10-13 вертикально вниз с установкой нижних поверхностей подъемных узлов 3 на опорные поверхности 36 и 37 перегрузочных тележек 18 и 19 таким образом, чтобы они частично выступали из них в направлении оси 6 продольного перемещения;
h) подъемные узлы 3 освобождаются от захвата подъемными элементами 10-13 извлечением подъемных пальцев 14 из соединительных отверстий 28;
i) перегрузочные тележки 18 и 19 перемещаются горизонтально вместе с находящимся на них грузосодержащим модулем 2 до тех пор, пока грузосодержащий модуль 2 не будет установлен над основаниями 30 и 31 перегрузочных тележек 15 и 16;
j) подвижные мосты 33 и 34 втягиваются в основания 30 и 31 перегрузочных тележек 15 и 16;
k) перегрузочные тележки 15 и 16 перемещаются строго до тех пор, пока грузосодержащий модуль 2 не будет установлен сбоку от платформы 20 ожидания и не выровняется с ней;
l) подвижные мосты 33 и 34 выдвигаются в направлении платформы 20 ожидания до тех пор, пока подвижные мосты 33 и 34 и платформы 20 ожидания не войдут друг в друга на величину, по существу равную ширине А грузосодержащего модуля 2, причем перегрузочные тележки 18 и 19 и установленный на них грузосодержащий модуль 2 остаются на основаниях 30 и 31 перегрузочных тележек 15 и 16 по существу неподвижными;
m) подвижные мосты 33 и 34 опираются на платформу 20 ожидания на противоположной стороне относительно основного рельсового пути 5;
n) перегрузочные тележки 18 и 19 и установленный на них грузосодержащий модуль 2 перемещаются горизонтально по подвижным мостам 33 и 34 до тех пор, пока грузосодержащий модуль 2 не окажется над платформой 20 ожидания;
o) две установочные тележки 22 движутся строго вдоль платформы 20 ожидания до тех пор, пока не располагаются сбоку от перегрузочных тележек 18 и 19 таким образом, чтобы нагрузочная поверхность 25 установочных тележек 22 расположилась под выступающей частью нижней поверхности подъемных узлов 3 основания;
p) нагрузочная поверхность 25 установочных тележек 22 поднимается, поднимая таким образом грузосодержащий модуль 2 и освобождая перегрузочные тележки 18 и 19;
q) перегрузочные тележки 18 и 19 перемещаются горизонтально до тех пор, пока не окажутся над основаниями 30 и 31 перегрузочных тележек 15 и 16;
r) подвижные мосты 33 и 34 втягиваются назад на перегрузочные тележки 15 и 16;
s) грузосодержащий модуль 2 с помощью установочных тележек 22 передается на платформу 20 ожидания;
t) грузосодержащий модуль 2 размещается в должное положение на платформе 20 ожидания опусканием нагрузочной поверхности 25 установочных тележек 22 и установкой теперь уже свободной части нижней поверхности подъемных узлов 3 основания на соответствующие опорные элементы 21 платформы 20 ожидания.
Способ погрузки грузосодержащих модулей 2 на открытые грузовые платформы 4 содержит обратную последовательность уже описанных этапов.
Он начинается с состояния, при котором грузосодержащие модули 2 установлены таким образом, что подъемные узлы 3 своей первой частью нижней поверхности опираются на верхнюю поверхность соответствующих опорных элементов 21 одной или большего количества платформ 20 ожидания, а вторая часть нижней поверхности подъемных узлов 3 является свободной. Открытая грузовая платформа 4 находится на основном рельсовом пути 5.
Способ погрузки включает следующие этапы:
aa) две установочные тележки 22 перемещаются на платформу 20 ожидания, чтобы опустить нагрузочную поверхность 25 установочных тележек 22 ниже части поверхности подъемных узлов 3, выступающей из опорных элементов 21;
bb) нагрузочная поверхность 25 установочных тележек 22 поднимается подъемом грузосодержащего модуля 2 с опорных элементов 21 с помощью опоры между нагрузочной поверхностью 25 и по меньшей мере частью нижней поверхности подъемных узлов 3, ранее выступавшей из опорных элементов 21;
cc) две перегрузочные тележки 15 располагаются сбоку напротив платформы 20 ожидания между этой платформой 20 ожидания и основным рельсовым путем 5, каждая из них содержит основание 30 и 31, подвижный мост 33 и 34, выполненный с возможностью перемещения в направлении, по существу поперечном основному рельсовому пути 5, и перегрузочные тележки 18 и 19, выполненные с возможностью перемещения по подвижному мосту 33 и 34 и имеющие опорные поверхности 36 и 37 для подъемных узлов 3;
dd) подвижные мосты 33 и 34 выдвигаются в направлении платформы 20 ожидания до тех пор, пока один конец их не будет опираться на нее, при этом подвижные мосты 33 и 34 и платформы 20 ожидания взаимно проникают друг в друга на величину, по существу равную ширине А грузосодержащего модуля 2;
ee) перегрузочные тележки 18 и 19 перемещаются горизонтально по подвижным мостам 33 и 34 до тех пор, пока они не окажутся над платформой 20 ожидания;
ff) установочные тележки 22 и грузосодержащий модуль 2 перемещаются до тех пор, пока конец платформы 20 ожидания не окажется напротив основного рельсового пути 5 таким образом, чтобы грузосодержащий модуль 2 расположился поверх перегрузочных тележек 18 и 19;
gg) нагрузочная поверхность 25 установочных тележек 22 опускается, чтобы те части нижней поверхности подъемных узлов 3, которые выступают из нагрузочной поверхности 25, встали на опорные поверхности 36 и 37 перегрузочных тележек 18 и 19;
hh ) перегрузочные тележки 18 и 19, а также находящийся на них грузосодержащий модуль 2 перемещаются горизонтально до тех пор, пока не будут установлены над основаниями 30 и 31 перегрузочных тележек 15 и 16;
ii) подвижные мосты 33 и 34 втягиваются назад от платформы 20 ожидания на основания перегрузочных тележек 15 и 16;
jj) перегрузочные тележки 15 и 16 перемещаются, таким образом перемещая грузосодержащий модуль 2 параллельно основному рельсовому пути 5, строго до тех пор, пока он не расположится сбоку от открытой грузовой платформы 4, на которую устанавливается грузосодержащий модуль;
kk) два подъемных элемента 12 и 13, расположенные на противоположной стороне, чем сторона перегрузочных тележек 15 и 16, относительно основного рельсового пути 5, переводятся на вспомогательный рельсовый путь 27, чтобы подготовить их для поддержки подвижных мостов 33 и 34;
ll) подвижные мосты 33 и 34 выдвигаются в направлении основного рельсового пути 5 до тех пор, пока их концы не будут опираться на опорные элементы 29, неподвижно связанные с подъемными элементами 12 и 13, расположенными на противоположной стороне, чем сторона перегрузочных тележек 15 и 16, относительно основного рельсового пути 5, при этом перегрузочные тележки 18 и 19 остаются по существу неподвижными на основаниях 30 и 31 перегрузочных тележек 15 и 16;
mm) перегрузочные тележки 18 и 19 перемещаются горизонтально на подвижных мостах 33 и 34 до тех пор, пока грузосодержащий модуль 2 не расположит их над открытой грузовой платформой 4, находящейся на основном рельсовом пути 5 сбоку перегрузочных тележек 15;
nn) два других подъемных элемента 10 и 11, находящиеся на противоположной стороне, чем сторона двух первых подъемных элементов 12 и 13, относительно основного рельсового пути 5, устанавливаются сбоку против грузосодержащего модуля 2;
oo) четыре подъемных узла 3, не перекрывающие друг друга по вертикали и расположенные попарно по противоположным сторонам относительно оси 6 продольного перемещения, захватываются подъемными элементами 10-13 вводом их подъемных пальцев 14 в соединительные отверстия 28 подъемных узлов 3;
pp) с помощью подъемных элементов 10-13 грузосодержащий модуль 2 поднимается вертикально вверх, чтобы освободить перегрузочные тележки 18 и 19 от веса грузосодержащего модуля 2;
qq) перегрузочные тележки 18 и 19 перемещаются горизонтально по подвижным мостам 33 и 34 до тех пор, пока не окажутся над основаниями 30 и 31 перегрузочных тележек 15 и 16;
rr) подвижные мосты 33 и 34 втягиваются назад, чтобы освободить пространство под грузосодержащим модулем 2 и подъемными элементами 10-13;
ss) грузосодержащий модуль 2 опускается с помощью подъемных элементов 10-13 и устанавливается на открытой грузовой платформе 4 таким образом, что нижние угловые узлы заходят в какие-либо крепежные устройства, которые имеются на открытой грузовой платформе;
tt) с извлечением подъемных пальцев 14 из соединительных отверстий 28 захват подъемных элементов 10-13 подъемными узлами 3 прекращается.
В этом способе погрузки особенно выделяются следующие этапы, соответствующие одному или большему количеству вышеописанных этапов:
I) грузосодержащий модуль 2 переносится до тех пор, пока не оказывается над открытой грузовой платформой 4, находящейся на основном рельсовом пути 5;
II) по меньшей мере, два подъемных элемента 10-13, расположенные по противоположным сторонам относительно основного рельсового пути 5, устанавливаются сбоку против грузосодержащего модуля 2;
III) четыре подъемных узла 3, не перекрывающие друг друга по вертикали и расположенные попарно по противоположным сторонам относительно оси 6 продольного перемещения, захватываются подъемными элементами 10-13 вводом их подъемных пальцев 14 в соединительные отверстия 28 подъемных узлов 3;
IV) подъемными элементами 10-13 грузосодержащий модуль 2 подается вертикально вверх и устанавливается на открытую грузовую платформу 4.
Система по настоящему изобретению содержит блок управления, предназначенный для управления и координации многочисленных перемещений различных частей системы и для реализации вышеописанных способов.
Отличительной особенностью способа выгрузки и погрузки по настоящему изобретению является то, что, по меньшей мере, два отдельных подъемных элемента 10-13, находящиеся с противоположных сторон относительно основного рельсового пути 5, устанавливаются сбоку против грузосодержащего модуля 2 для вертикального перемещения грузосодержащего модуля 2 путем осуществления захвата подъемных узлов 3. Это позволяет исключить касание между подъемными элементами 10-13 и линией электросети, проходящей над основным рельсовым путем, и дает возможность использовать подъемные узлы 3 таким образом, чтобы они могли выдерживать вес грузосодержащего модуля.
Другой отличительной особенностью способа выгрузки и погрузки по настоящему изобретению является то, что грузосодержащий модуль 2 перемещается, опираясь первой частью нижней поверхности подъемных узлов 3 основания на первую опорную поверхность, а затем, опираясь второй частью нижней поверхности подъемных узлов 3 основания на вторую опорную поверхность. Эта отличительная особенность данного способа показана на фиг.10-12. Первой или второй опорной поверхностью могут являться либо установочные поверхности 36 и 37 перегрузочных тележек 18 и 19, либо нагрузочные поверхности 25 установочных тележек 22, или же опять верхние поверхности опорных элементов 21 платформы 20 ожидания. В этом смысле каждая из двух перегрузочных тележек 18 и 19 устанавливается под двумя подъемными узлами 3 таким образом, что только первая часть нижней поверхности подъемных узлов 3 опирается на установочные поверхности 36 и 37 перегрузочных тележек 18 и 19, что ясно показано на фиг.9.
Эти установочные поверхности 36 и 37 перегрузочных тележек 18 и 19 имеют также вертикальные штифты, предназначенные для их ввода в нижние соединительные отверстия 28 с целью обеспечения большей безопасности при перемещении грузосодержащих модулей 2.
Перегрузочные тележки 18 и 19 затем устанавливаются установочными тележками 22, которые находятся ниже грузосодержащих модулей 2, таким образом, чтобы их нагрузочная поверхность 25 установилась ниже свободной части нижней поверхности подъемных узлов 3 основания. Вторая часть нижней поверхности подъемных узлов 3 содержит, по меньшей мере, часть свободной поверхности, то есть она не опирается непосредственно на установочные поверхности 36 и 37 перегрузочных тележек 18 и 19. Перемещение установочной тележки 22 позволяет весу грузосодержащего модуля 2 переходить от перегрузочных тележек 18 и 19 к установочной тележке 22 в результате опоры второй части нижней поверхности подъемных узлов 3 основания на нагрузочную поверхность 25 установочной тележки 22. На этом этапе свободная поверхность включает в себя первоначально опертую поверхность. Затем, когда грузосодержащий модуль переходит с установочной тележки 22 на платформу 20 ожидания, часть теперь уже свободной поверхности опирается на опорные элементы 21.
Данный способ позволяет производить передачу грузосодержащего модуля от одного элемента перемещения к другому, всегда при этом «снимая» вес грузосодержащего модуля, передаваемый через подъемные узлы 3, без сложных маневров, требующих сцепления с соединительными отверстиями 28. Ввод штифтов в соединительные отверстия необходим только на том этапе, на котором грузосодержащий модуль 2 должен будет снят с открытой грузовой платформы 4 или установлен на ней, поскольку нижняя поверхность подъемных узлов 3 основания во время всей операции является недоступной.
Вследствие того факта, что данный способ реализуется автоматической системой, выгрузка грузосодержащих модулей с открытых грузовых платформ и их установка на платформы ожидания производится быстро со значительным увеличением эффективности складских операций.
Более того, поскольку грузосодержащие модули перемещаются только за подъемные узлы 3, которые всегда являются стандартизованными как по их форме, так и по их расположению, не требуется внесения никаких изменений ни в открытые грузовые платформы, ни в грузосодержащие модули.
Система содержит разделенные подъемные элементы (10-13), устанавливающиеся на вспомогательных рельсовых путях (26, 27) сбоку грузосодержащего модуля (2) и перемещающие его вертикально, захватывая подъемные узлы (3). Каждый из подъемных элементов содержит подъемный палец (14), выполненный с возможностью перемещения в вертикальном направлении и скольжения в направлении оси (S), перпендикулярной к оси (6) продольного перемещения. Первые перегрузочные тележки (15, 16) имеют возможность независимого перемещения в направлении, параллельном основному рельсовому пути, по перегрузочному рельсовому пути (17), на котором они размещаются по бокам грузосодержащего модуля. Первые перегрузочные тележки содержат подвижные мосты (33, 34), перпендикулярные к оси продольного перемещения, и вторые перегрузочные тележки (18, 19), имеющие возможность перемещения по подвижному мосту. Вторые перегрузочные тележки (18, 19) имеют установочную поверхность (36, 37) для поддержки подъемных узлов грузосодержащего модуля. Повышается гибкость системы, снижаются ее габариты и энергоемкость. 2 н. и 11 з.п. ф-лы, 12 ил.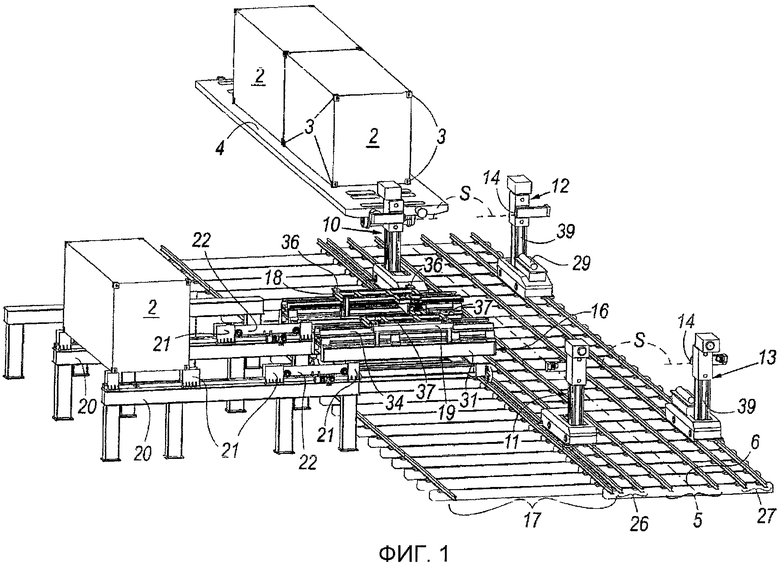
1. Система для выгрузки и погрузки грузосодержащих модулей (2), оснащенных подъемными узлами (3), с открытых грузовых платформ (4) и на открытые грузовые платформы (4), установленные с возможностью перемещения по основному рельсовому пути (5) вдоль оси (6) продольного перемещения, при этом система содержит:
по меньшей мере два подъемных элемента (10-13), разделенных между собой по меньшей мере в пространстве над основным рельсовым путем (5) и приспособленных устанавливаться сбоку грузосодержащего модуля (2) по противоположным сторонам относительно основного рельсового пути (5) и перемещать его вертикально путем выполнения захвата подъемных узлов (3), причем упомянутые подъемные элементы (10-13) являются подвижными по горизонтали в направлении, параллельном основному рельсовому пути (5);
два вспомогательных рельсовых пути (26, 27), расположенные по двум сторонам основного рельсового пути (5) и параллельно ему, для перемещения подъемных элементов (10-13), причем каждый из подъемных элементов (10-13) содержит по меньшей мере один подъемный палец (14), имеющий ось S, расположенную горизонтально в плоскости, по существу перпендикулярной к оси (6) продольного перемещения, причем упомянутый подъемный палец (14) выполнен с возможностью перемещения в вертикальном направлении и скольжения в направлении оси S;
по меньшей мере одну первую перегрузочную тележку (15, 16), имеющую возможность перемещения в направлении, параллельном основному рельсовому пути (5);
по меньшей мере один перегрузочный рельсовый путь (17), параллельный основному рельсовому пути (5), для перемещения первых перегрузочных тележек (15, 16),
причем упомянутая первая перегрузочная тележка (15, 16) содержит подвижный мост (33, 34), предназначенный для перемещения по существу в горизонтальном направлении в плоскости, перпендикулярной к оси (6) продольного перемещения, и
упомянутая по меньшей мере одна первая перегрузочная тележка (15, 16) содержит вторую перегрузочную тележку (18, 19), имеющую возможность перемещения по подвижному мосту (33, 34) в направлении, по существу поперечном основному рельсовому пути (5), причем упомянутая вторая перегрузочная тележка (18, 19) имеет одну или две установочные поверхности (36, 37) для поддержки подъемных узлов (3) грузосодержащего модуля (2), и упомянутые установочные поверхности (36, 37) обращены вверх,
отличающаяся тем, что она содержит по меньшей мере две первые перегрузочные тележки (15, 16), расположенные на той же стороне основного рельсового пути и перемещаемые независимо, позволяя осуществлять погрузку и выгрузку грузосодержащих модулей различных размеров, и тем, что она содержит блок управления, предназначенный для управления и координации многочисленных перемещений, так что две первые перегрузочные тележки (15, 16) размещаются по бокам напротив грузосодержащего модуля.
2. Система по п.1, отличающаяся тем, что каждая установочная поверхность (36, 37) второй перегрузочной тележки (18, 19) приспособлена поддерживать только первую часть нижней поверхности соответствующего подъемного узла (3).
3. Система по п.1, отличающаяся тем, что каждая установочная поверхность (36, 37) имеет вертикальный штифт, предназначенный для его ввода в нижние соединительные отверстия (28) соответствующего подъемного узла (3) с целью обеспечения безопасного перемещения грузосодержащего модуля (2).
4. Система по п.1, отличающаяся тем, что содержит по меньшей мере одну платформу (20) ожидания, имеющую опорные элементы (21) для поддержки грузосодержащих модулей (2) посредством подъемных узлов (3), и по меньшей мере одну установочную тележку (22), имеющую возможность перемещения вдоль платформы (20) ожидания, причем установочная тележка (22) имеет подвижные нагрузочные поверхности (25), приспособленные опираться на вторую часть нижней поверхности подъемных узлов (3) и для вертикальной передачи грузосодержащего модуля (2), при этом опорные элементы (21) принимают упомянутый модуль (2) с нагрузочных поверхностей (25) и опираются на первую часть нижней поверхности подъемных узлов (3).
5. Система по п.1, отличающаяся тем, что упомянутая установочная тележка (22) приспособлена переносить грузосодержащий модуль (2) вертикально и горизонтально.
6. Система по п.4, отличающаяся тем, что платформа (20) ожидания выполнена с возможностью поддержки подвижного моста (33, 34) с одного конца.
7. Система по п.6, отличающаяся тем, что платформа (20) ожидания и подвижный мост (33, 34) производят взаимное проникновение на величину, равную ширине (А) грузосодержащего модуля (2).
8. Система по п.1, отличающаяся тем, что подъемные элементы (10-13) содержат устройство для автоматического распознавания соединительных отверстий (28) в подъемных узлах (3).
9. Система по п.1, отличающаяся тем, что по меньшей мере один из подъемных элементов (10-13) имеет такую форму, которая обеспечивает возможность прохождения второй перегрузочной тележки (18, 19) под подъемным пальцем (14).
10. Система по п.1, отличающаяся тем, что содержит по меньшей мере один опорный элемент (29) для поддержки конца подвижного моста (33, 34) на стороне, противоположной стороне первой перегрузочной тележки (15, 16) относительно основного рельсового пути (5).
11. Система по п.1, отличающаяся тем, что содержит устройство для горизонтирования подвижного моста (33, 34).
12. Система по п.1, отличающаяся тем, что содержит четыре подъемных элемента (10-13), каждый из которых имеет возможность независимого перемещения.
13. Способ выгрузки и погрузки грузосодержащих модулей (2) с использованием системы по любому из предшествующих пунктов.
| EA 200801263 A1, 27.02.2009 | |||
| US 20040013504 A1, 22.01.2004 | |||
| Способ балансировки роторов | 1975 |
|
SU564555A1 |

