Изобретение относится к подъемно-мачтовым устройствам, преимущественно к автоматическим системам развертывания подъемно-мачтовых устройств мобильных антенных установок.
Известна телескопическая мачта, снабженная подъемным механизмом с редуктором (а.с. СССР №661297/26, 31.03.1960 г.). Согласно описанию механизм подъема и развертывания первой мачты представляет собой механический привод, обеспечивающий ручной режим подъема при участии оператора, а следовательно, большое время развертывания.
Известен гидравлический привод преимущественно мобильной антенной установки с подъемной мачтой (патент РФ №2281244 от 09.03.2005 г.). Однако согласно описанию приводные механизмы являются гидравлическими, а следовательно, достаточно сложны и трудоемки в изготовлении. Необходимость выполнения ручных операций при развертывании системы ведет к увеличению времени развертывания системы и риску выполнения неправильных действий оператора, которые могут привести к аварийной ситуации.
Известна телескопическая мачта (пат. №2198131, 13.12.2000), снабженная приводным электродвигателем с планетарным редуктором и конечными выключателями верхнего и нижнего положения мачты, по сигналам которых происходит отключение приводного электродвигателя. Данное устройство является ближайшим аналогом подъемно-мачтового устройства и принимается за прототип.
Согласно описанию механизм подъема и развертывания второй мачты представляет собой электромеханический привод, обеспечивающий полуавтоматический режим подъема при участии оператора с контролем предельных положений телескопической мачты путем установки конечных выключателей.
Недостатками вышеуказанной системы-прототипа являются:
- низкая надежность и безопасность выполняемых операций, при ошибочных действиях оператора (например, подъем при превышении предельных углов отклонения от вертикали может привести к повреждению конструкции телескопической мачты, возможность повреждения конструкции и приводного электродвигателя при отказе одного из датчиков предельного положения);
- неудобство в управлении (необходимость постоянного контроля процесса подъема мачты, невозможность подъема ее на заданную высоту).
Техническими задачами заявляемого устройства являются:
- повышение удобства управления за счет обеспечения возможности дистанционного управления;
- автоматическое выполнение операций по развертыванию и свертыванию;
- улучшение эксплуатационных характеристик за счет выбора оптимальных законов управления и осуществление диагностики во время проведения всех операций с остановкой работы устройства в случае возникновения нештатных операций, таких как возникновение препятствий при подъеме, просадка грунта и т.п.
Для достижения указанного технического результата в подъемно-мачтовое устройство, состоящее из подъемной телескопической мачты, приводного двигателя подъема телескопической мачты, механически соединенного через редуктор с приводным винтом и электромагнитного тормоза, согласно изобретению введены развертываемая платформа, установленная на телескопической мачте, система автоматического развертывания и подъема, включающая электропривод развертывания платформы с датчиком положения поворотной муфты, кинематически связанной с осью вращения платформы, электропривод фиксатора транспортного положения платформы, электропривод фиксатора транспортного положения мачты, станцию управления, датчик высоты подъема телескопической мачты, через редуктор связанный с приводным винтом телескопической мачты, и датчики наклона телескопической мачты по двум взаимоперпендикулярным осям, при этом упомянутые датчики электрически связаны со станцией управления.
Кроме этого, станция управления имеет панель управления, встроенный контроллер, интегрированные усилители мощности приводных электродвигателей, модули обработки датчиков, дифференциаторы, модуль цифрового канала связи и схему блокировки приводных электродвигателей, причем панель управления, модуль цифрового канала связи, модули обработки, дифференциаторы и интегрированные усилители электрически связаны со встроенным контроллером и схемой блокировки приводных электродвигателей.
Существенными отличительными признаками являются наличие новых элементов - приводов развертывания платформы с датчиком положения, датчика высоты подъема, приводов фиксации в транспортном положении, датчиков наклона подъемно-мачтового устройства, станции управления с интегрированными панелью управления и усилителями мощности, приводных электродвигателей, модуля цифрового канала связи, обеспечивающего дистанционное управление, схемы блокировок и их связей с другими элементами системы, которые при их взаимодействии обеспечивают диагностику и управление подъемно-мачтовым устройством в процессе работы.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но при их введении в указанной связи в систему позволяет значительно улучшить качество управления приводами, выполнить полную автоматизацию процесса развертывания и подъема, повысить безопасность выполняемых операций, повысить эксплуатационные характеристики.
Кроме того, большинство элементов системы удобнее реализовать как часть программного обеспечения станции управления, при этом модуль внешнего канала связи будет являться последовательным портом контроллера станции управления, а алгоритмы диагностики выполнены в виде подпрограмм управления выходными драйверами исполнительных устройств и дискретным выходом контроллера.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения. Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна».
Не обнаружено также применение указанных признаков в заявляемой совокупности с другими признаками для достижения указанного результата, следовательно, заявляемое устройство соответствует критерию изобретения «изобретательский уровень».
Техническая сущность предложенного подъемно-мачтового устройства поясняется чертежами, на которых:
На фиг.1 приведен общий вид подъемно-мачтового устройства.
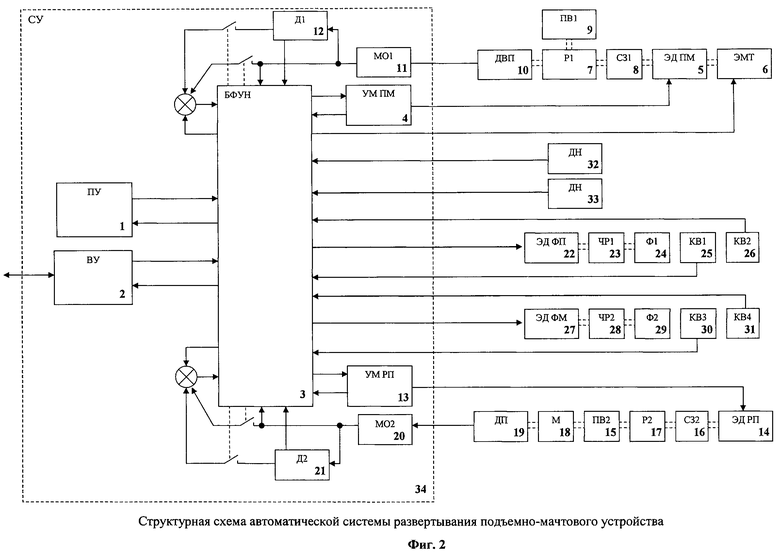
На фиг.2 приведена структурная схема заявляемой автоматической системы развертывания подъемно-мачтового устройства. Автоматическая система управления подъемно-мачтового устройства представляет собой панель управления (ПУ) 1 и внешний канал управления (ВУ) 2, электрически связанные с блоком формирования управляющих напряжений (БФУН) 3, который в свою очередь формирует электрические сигналы управления четырьмя приводными электродвигателями.
Привод подъема мачты содержит усилитель мощности (УМ ПМ) 4, выход которого электрически соединен с приводным электродвигателем (ЭД ПМ) 5, выходной вал которого механически связан с электромагнитным тормозом (ЭМТ) 6 и редуктором (Р1) 7 через сдающее звено (СЗ1) 8, выходной вал которого вращает приводной винт (ПВ1) 9 и датчик высоты подъема (ДВП) 10, электрический сигнал с которого поступает на модуль обработки (МО1) 11.
Выход модуля обработки (МО1) 11 соединен с дифференциатором (Д1) 12 и блоком формирования управляющих напряжений (БФУН) 3.
Привод развертывания платформы содержит усилитель мощности (УМ РП) 13, выход которого соединен электрически с приводным электродвигателем (ЭД РП) 14, выходной вал которого механически связан с приводным винтом (ПВ2) 15 через сдающее звено (СЗ2) 16 и редуктор (Р2) 17, который поворачивает расцепляющую муфту (М) 18, на оси вращения которой расположен датчик положения (ДП) 19, электрический сигнал с которого поступает на модуль обработки (МО2) 20.
Выход модуля обработки (МО2) 20 соединен с дифференциатором (Д2) 21 и блоком формирования управляющих напряжений (БФУН) 3.
Привод фиксатора транспортного положения платформы содержит приводной электродвигатель (ЭД ФП) 22, выходной вал которого через червячный редуктор (ЧР1) 23 двигает фиксатор (Ф1) 24, который в крайних положениях воздействует на конечные выключатели (КВ1, КВ2) 25 и 26, сигналы с которых поступают на блок формирования управляющих напряжений (БФУН) 3.
Привод фиксатора транспортного положения мачты содержит приводной электродвигатель (ЭД ФМ) 27, выходной вал которого через червячный редуктор (ЧР2) 28 двигает фиксатор (Ф2) 29, который в крайних положениях воздействует на конечные выключатели (КВЗ, КВ4) 30 и 31, сигналы с которых поступают на блок формирования управляющих напряжений (БФУН) 3.
Датчики наклона (ДН) 32 и 33 подъемно-мачтового устройства электрически связаны с блоком формирования управляющих напряжений 3.
Система работает следующим образом.
При поступлении управляющей команды с панели управления 1 или по внешнему каналу управления 2 в блоке формирования управляющих напряжений 3 происходит формирование сигнала на приводной электродвигатель 22 для перевода фиксатора транспортного положения мачты 24 через редуктор 23 в рабочее положение. По достижении рабочего положения фиксатор 24 воздействует на конечный выключатель 25, сигнал с которого поступает на блок формирования управляющих напряжений 3, и происходит снятие управляющего сигнала с приводного электродвигателя 22.
После перевода фиксатора 24 в рабочее положение в блоке формирования управляющего напряжения 3 формируется задающий сигнал, который суммируется с сигналами модуля обработки 20 датчика положения 19 и дифференциатора 21, формируя разностный сигнал управления для усилителя мощности 13, таким образом, что одновременно выполняется слежение за скоростью и углом поворота платформы. По достижении заданного положения, в котором платформа при подъеме может выйти из зацепления с муфтой 18, происходит выключение привода развертывания платформы и формируется сигнал для приводного электродвигателя 27 фиксатора транспортного положения мачты 29. Работа привода фиксатора транспортного положения мачты 29 идентична работе привода фиксатора транспортного положения платформы 24.
После перевода фиксатора 29 в рабочее положение в блоке формирования управляющего напряжения 3 формируется задающий сигнал, который суммируется с сигналами модуля обработки 11 датчика высоты подъема 10 и дифференциатора 12, формируя разностный сигнал управления для усилителя мощности 4, такой, что одновременно выполняется слежение за скоростью и высотой подъема. На время подъема расцепляется электромагнитный тормоз 6 по сигналу, поступающему с блока формирования управляющих напряжений 3.
Перевод подъемно-мачтового устройства в транспортное состояние осуществляется в обратной последовательности.
Чтобы исключить пиковые и ударные нагрузки на механические элементы привода и повысить плавность выполнения операций, задающие сигналы блока формирования управляющих напряжений для управления приводами подъема мачты и развертывания платформы формируются с ограничением по скорости и ускорению в зависимости от массы установленной нагрузки, что существенно повышает надежность работы системы в целом.
В состав приводов также включены сдающие звенья 8 и 16, которые защищают редукторы 7 и 17 и приводные винты 9 и 15 от воздействия разрушительных нагрузок, которые могут возникнуть в процессе эксплуатации.
Во время подъема и развертывания платформы с усилителей мощностей 4 и 13 формируются сигналы, пропорциональные току приводных электродвигателей 5 и 14, по которым происходит контроль поднимаемой нагрузки, а также непрерывный анализ наличия аварийных ситуаций.
Во время операций подъема и развертывания ведется анализ наклона подъемно-мачтового устройства от вертикали, информация о наклоне поступает с датчиков наклона 32 и 33 по двум взаимоперпендикулярным осям. При превышении предельной величины наклона система останавливает выполнение операции и сообщает данную информацию через панель управления 1 и внешний канал связи 2 оператору.
По командам с панели управления 1 или внешнего канала связи 2 работу системы можно остановить в любом положении. Также возможен перевод в любое положение системы на любую высоту по соответствующим командам управления.
Приведенные технические преимущества, целесообразность и надежность системы, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытного образца подъемно-мачтового устройства по ОКР «Барнаул-Т-ПМУ».
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-мачтовое устройство | 2016 |
|
RU2622516C1 |
| Автоматическое антенно-мачтовое устройство с несимметричной и симметричными антеннами | 2023 |
|
RU2813238C1 |
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| МОБИЛЬНОЕ АНТЕННОЕ УСТРОЙСТВО | 2011 |
|
RU2444097C1 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2004 |
|
RU2265262C1 |
Изобретение относится к подъемно-мачтовым устройствам, преимущественно к автоматическим системам развертывания подъемно-мачтовых устройств мобильных антенных установок. Техническим результатом является улучшение эксплуатационных характеристик за счет выбора оптимальных законов управления и осуществление диагностики во время проведения всех операций с остановкой работы устройства. Подъемно-мачтовое устройство состоит из подъемной телескопической мачты, приводного двигателя подъема телескопической мачты, механически соединенного через редуктор с приводным винтом, и электромагнитного тормоза, развертываемой платформы, установленной на телескопической мачте, системы автоматического развертывания и подъема, включающей электропривод развертывания платформы с датчиком положения поворотной муфты, кинематически связанной с осью вращения платформы, электропривод фиксатора транспортного положения платформы, электропривод фиксатора транспортного положения мачты, станцию управления, датчик высоты подъема телескопической мачты, через редуктор связанный с приводным винтом телескопической мачты, и датчики наклона телескопической мачты по двум взаимоперпендикулярным осям, при этом упомянутые датчики электрически связаны со станцией управления. 1 з.п. ф-лы, 2 ил.
1. Подъемно-мачтовое устройство, содержащее подъемную телескопическую мачту, приводной двигатель подъема телескопической мачты, механически соединенный через редуктор с приводным винтом, электромагнитный тормоз, отличающееся тем, что в него введены развертываемая платформа, установленная на телескопической мачте, система автоматического развертывания и подъема, включающая электропривод развертывания платформы с датчиком положения поворотной муфты, кинематически связанной с осью вращения платформы, электропривод фиксатора транспортного положения платформы, электропривод фиксатора транспортного положения мачты, станцию управления, датчики высоты подъема телескопической мачты, через редуктор, связанный с приводным винтом телескопической мачты, и датчики наклона телескопической мачты по двум взаимоперпендикулярным осям, при этом упомянутые датчики электрически связаны со станцией управления.
2. Подъемно-мачтовое устройство по п.1, отличающееся тем, что станция управления имеет панель управления, встроенный контроллер, интегрированные усилители мощности приводных электродвигателей, модули обработки датчиков, дифференциаторы, модуль цифрового канала связи и схему блокировки приводных электродвигателей, причем панель управления, модуль цифрового канала связи, модули обработки, дифференциаторы и интегрированные усилители электрически связаны со встроенным контроллером и схемой блокировки приводных электродвигателей.
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА | 2000 |
|
RU2198131C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| DE 4239715 С1, 23.02.1995 | |||
| US 5426444 А1, 20.06.1995. | |||

