Изобретение относится к области электротехники, в частности к преобразованию переменного тока в постоянный с последующим преобразованием в переменный для питания электроприводов электровозов переменного тока.
Известен способ управления четырехквадрантным преобразователем, заключающийся в том, что ток дросселя регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости входного фильтра, определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала и в предыдущем полупериоде питающего напряжения во время приложения к дросселю напряжения источника переменного напряжения вводят значение тока дросселя в начале и в конце приложения к нему напряжения источника переменного напряжения и вычисляют индуктивное сопротивление контура протекания тока дросселя (патент RU №2289193, кл. Н02М 7/48, 2006 г.).
Недостатком известного способа является низкий коэффициент мощности преобразователя.
Известен способ управления четырехквадрантным преобразователем, заключающийся в том, что в каждом полупериоде переменного напряжения измеряют действующее значение тока дросселя и регулируют ток дросселя изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и конденсатора выходного фильтра, продолжительности приложения напряжений определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол Ψ, при этом в каждом полупериоде переменного напряжения измеряют значение напряжения конденсатора выходного фильтра, определяют разность между заданным и текущим напряжениями выходного фильтра, вводят эту разность в регулятор, уменьшают значение глубины модуляции на величину сигнала с выхода регулятора и определяют величину угла сдвига между напряжением источника переменного напряжения и синусоидальным модулирующим сигналом для следующего полупериода переменного напряжения (патент RU №2315415, кл. Н02М 7/797, 2006 г.).
Недостатком известного способа являются низкие энергетические показатели при наличии высших гармоник в напряжении питающей сети.
Известен способ регулирования четырехквадрантным преобразователем, принятый за прототип, при котором трансформированное напряжение контактной сети преобразуют в регулируемое постоянное напряжение, которым питают через промежуточный контур постоянного напряжения и импульсный инвертор электроприводы трехфазного тока, при этом измеряют постоянное напряжение на выходе преобразователя, сравнивают его с опорным значением и подают на вход регулятора промежуточного контура, которым формируют заданное значение активной составляющей тока и подают на один из входов регулятора тока, а на два других подают соответственно текущее значение фазового угла и заданную величину реактивного тока, которую формируют регулятором реактивного тока по разности между опорной величиной реактивного тока и реактивной составляющей тока контактной сети, вычисленной анализатором, при этом регулятором реактивного тока посредством аддитивной реактивной составляющей тока управляют регулятором тока, а импульсным модулятором по сигналу с регулятора тока вырабатывают импульсы управления четырехквадрантным преобразователем, по которым формируют заданное значение выходного постоянного напряжения и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети (патент RU №2252329, кл. F02C 9/28, 2005 г.).
Недостатком известного способа является низкая точность регулирования из-за больших временных задержек в определении фазы между напряжением контактной сети и током. Также в данном способе отсутствует раздельное регулирование активной и реактивной составляющих тока, протекающего во вторичной цепи тягового трансформатора, что приводит к дополнительным погрешностям.
Техническим результатом изобретения является повышение энергетических показателей (коэффициент мощности) тягового электропривода электровоза за счет повышения точности управления четырехквадрантным преобразователем.
Указанный технический результат достигается тем, что в способе управления четырехквадрантным преобразователем электровоза, заключающемся в том, что трансформированное напряжение контактной сети четырехквадрантным преобразователем преобразуют в регулируемое постоянное напряжение, которым питают через емкостной фильтр и автономный инвертор напряжения асинхронный тяговый двигатель, при этом измеряют постоянное напряжение на выходе четырехквадрантного преобразователя, сравнивают его с заданным значением и подают на вход регулятора напряжения, которым формируют заданное значение активной составляющей тока, сравнивают с вычисленным значением активной составляющей тока и подают на вход регулятора активного тока, вычисляют разность между заданием по реактивному току и вычисленным значением реактивной составляющей тока и подают на регулятор реактивного тока, а блоком широтно-импульсной модуляции вырабатывают импульсы управления четырехквадрантным преобразователем, по которым формируют заданное значение выходного постоянного напряжения и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети, измеряют однофазные напряжение первичной и ток вторичной обмотки трансформатора, которые наблюдателями по напряжению и току соответственно преобразуют в двухфазные векторные сигналы в неподвижной системе координат, при этом сигналы с наблюдателя по напряжению нормализатором преобразуют в сигналы единичной амплитуды, по которым совместно с сигналами наблюдателя по току прямым преобразователем координат вычисляют активную и реактивную составляющие тока во вращающейся системе координат, регулирование которых осуществляют по отдельным независимым каналам соответственно регуляторами активного и реактивного токов, выходные сигналы которых совместно с сигналами нормализатора обратным преобразователем координат управляют блоком широтно-импульсной модуляции.
Для реализации способа выполнены структурные схемы силовой части электропривода электровоза и системы управления четырехквадрантным преобразователем.
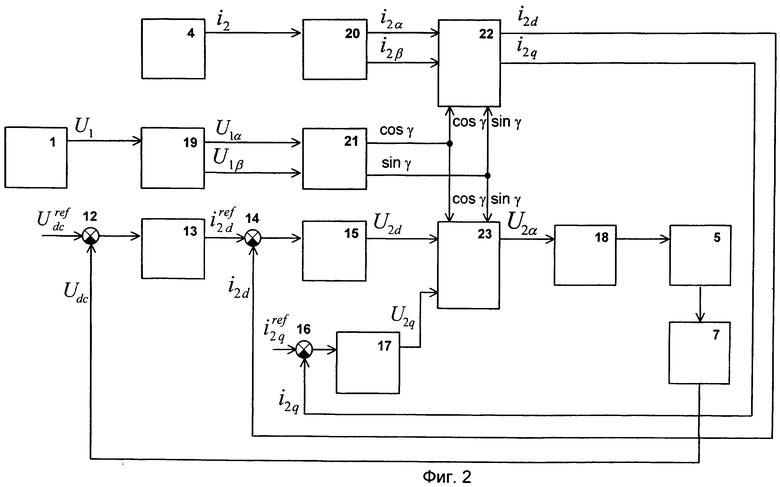
На фиг.1 представлена структурная схема силовой части электропривода электровоза с использованием четырехквадрантного преобразователя.
На фиг.2 представлена структурная схема системы управления четырехквадрантным преобразователем.
Силовая часть электропривода электровоза (фиг.1) содержит датчик напряжения 1 контактной сети с напряжением Us, тяговый трансформатор 2, первичная обмотка которого подключена к контактной сети, а вторичная обмотка через дроссель 3 и датчик тока 4 подключена к входу четырехквадрантного преобразователя 5, состоящего из четырех IGBT-транзисторов 6, шунтированных обратными диодами 24, датчик напряжения 7, измеряющий постоянное напряжение на выходе четырехквадрантного преобразователя 5, емкостной фильтр 8, автономный инвертор напряжения 9, который через емкостной фильтр 8 подключен к выходу четырехквадрантного преобразователя 5, асинхронный тяговый двигатель 10, подключенный к выходу автономного инвертора напряжения 9, систему управления 11.
Система управления 11 (Фиг.2) четырехквадрантным преобразователем, реализующая предложенный способ управления, содержит блок сравнения 12 по напряжению, к одному из входов которого подключен информационный выход датчика напряжения 7, регулятор напряжения 13, вход которого подключен к выходу блока сравнения 12 по напряжению, а выход подключен к одному из входов блока сравнения 14 по активной составляющей тока, выход которого соединен с входом регулятора активного тока 15, блок сравнения 16 по реактивной составляющей тока, выход которого подключен к входу регулятора реактивного тока 17, блок широтно-импульсной модуляции (ШИМ)18, выход которого подключен к управляющим входам четырехквадрантного преобразователя 5 (к затворам IGBT-транзисторов 6), наблюдатель 19 по напряжению, наблюдатель 20 по току, входы которых соответственно подключены к информационным выходам датчика напряжения 1 и датчика тока 4, нормализатор 21, входы которого соединены с выходами наблюдателя 19 по напряжению, а выходы одновременно подключены к одним из входов прямого преобразователя координат 22 и обратного преобразователя координат 23, выход которого подключен к входу блока ШИМ 18, а выходы прямого преобразователя координат 22 соответственно подключены к входу блока сравнения 14 по активной составляющей тока и к входу блока сравнения 16 по реактивной составляющей тока.
Тяговый трансформатор 2 предназначен для понижения напряжения контактной сети Us. Четырехквадрантный преобразователь 5 представляет собой однофазный обратимый преобразователь переменного напряжения в постоянное, собранный на IGBT-транзисторах 6, каждый из которых шунтирован обратным диодом 24. Емкостной фильтр 8 предназначен для сглаживания пульсаций выходного напряжения четырехквадрантного преобразователя 5. Автономный инвертор напряжения 9 предназначен для преобразования входного постоянного напряжения в трехфазное переменное напряжение, регулируемое по амплитуде и частоте для питания асинхронного тягового двигателя 10.
Все элементы системы управления 11 реализованы в виде микропроцессорного устройства управления. Регулятор напряжения 13, регулятор активного тока 15, регулятор реактивного тока 17 представляют собой пропорционально-интегральные регуляторы. Наблюдатель 19 по напряжению и наблюдатель 20 по току построены на принципе цифровой фильтрации Калмана. Наблюдатель 19 по напряжению и наблюдатель 20 по току предназначены для преобразования измеренных однофазных сигналов от датчика напряжения 1 и датчика тока 4 в двухфазные сигналы в неподвижной системе координат (α, β). Прямой преобразователь координат 22 предназначен для преобразования составляющих тока i2α, i2β из неподвижной системы координат (α, β) посредством нормализатора 21 в сигналы i2d i2q во вращающейся системе координат (d, q), жестко привязанных к вектору входного питающего напряжения в соответствии с формулами:


где Υ - угол положения вектора напряжения контактной сети в неподвижной системе координат (α, β).
Система управления 11 четырехквадрантным преобразователем 5 имеет два отдельных независимых канала: канал регулирования активного тока и канал регулирования реактивного тока. В канал регулирования активного тока входят блок сравнения 14 по активной составляющей тока, регулятор активного тока 15, прямой преобразователь координат 22. В канал регулирования реактивного тока входят блок сравнения по реактивной составляющей тока 16, регулятор реактивного тока 17, прямой преобразователь координат 22. При этом канал регулирования активного тока подчинен внешнему контуру регулирования выходного напряжения четырехквадрантного преобразователя 5. В состав внешнего контура регулирования входят блок сравнения по напряжению 12, регулятор напряжения 13, датчик напряжения 7.
Предлагаемый способ управления четырехквадрантным преобразователем электровоза реализован следующим образом.
Трансформированное напряжение контактной сети Us четырехквадрантным преобразователем 5 преобразуют в регулируемое постоянное напряжение Udc, которым питают через емкостной фильтр 8 и автономный инвертор напряжения 9 асинхронный тяговый двигатель 10, при этом измеряют датчиком напряжения 7 постоянное напряжение Udс на выходе четырехквадрантного преобразователя 5, сравнивают его в блоке сравнения 12 по напряжению с заданным значением постоянного напряжения  и подают на вход регулятора напряжения 13, которым формируют заданное значение активной составляющей тока
и подают на вход регулятора напряжения 13, которым формируют заданное значение активной составляющей тока  , сравнивают в блоке сравнения 14 по активной составляющей тока с вычисленным значением активной составляющей тока i2d с прямого преобразователя координат 22 и подают на вход регулятора активного тока 15, которым формируют заданное значение напряжения U2d по оси d вращающейся системы координат (d, q). Вычисляют блоком сравнения 16 по реактивной составляющей тока разность между заданием по реактивному току
, сравнивают в блоке сравнения 14 по активной составляющей тока с вычисленным значением активной составляющей тока i2d с прямого преобразователя координат 22 и подают на вход регулятора активного тока 15, которым формируют заданное значение напряжения U2d по оси d вращающейся системы координат (d, q). Вычисляют блоком сравнения 16 по реактивной составляющей тока разность между заданием по реактивному току  и вычисленным значением реактивной составляющей тока i2q с прямого преобразователя координат 22 и подают на регулятор реактивного тока 17, которым формируют заданное значение напряжения U2q по оси q вращающейся системы координат (d, q). Сформированные регулятором активного тока 15 и регулятором реактивного тока 17 сигналы U2d, U2q подают на одни из входов обратного преобразователя координат 23, на другие входы которого поступают сигналы единичной амплитуды cosy, siny с нормализатора 21. Обратным преобразователем координат 23 сигналы U2d, U2q совместно с сигналами единичной амплитуды cosy, siny нормализатора 21 формируют сигнал U2α заданного напряжения на входе четырехквадрантного преобразователя 5 и подают на вход блока ШИМ 18. Блоком ШИМ 18 вырабатывают импульсы управления четырехквадрантным преобразователем 5, по которым формируют заданное значение выходного постоянного напряжение Udc и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети Us.
и вычисленным значением реактивной составляющей тока i2q с прямого преобразователя координат 22 и подают на регулятор реактивного тока 17, которым формируют заданное значение напряжения U2q по оси q вращающейся системы координат (d, q). Сформированные регулятором активного тока 15 и регулятором реактивного тока 17 сигналы U2d, U2q подают на одни из входов обратного преобразователя координат 23, на другие входы которого поступают сигналы единичной амплитуды cosy, siny с нормализатора 21. Обратным преобразователем координат 23 сигналы U2d, U2q совместно с сигналами единичной амплитуды cosy, siny нормализатора 21 формируют сигнал U2α заданного напряжения на входе четырехквадрантного преобразователя 5 и подают на вход блока ШИМ 18. Блоком ШИМ 18 вырабатывают импульсы управления четырехквадрантным преобразователем 5, по которым формируют заданное значение выходного постоянного напряжение Udc и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети Us.
Измеряют датчиком напряжения 1 однофазное напряжение первичной обмотки трансформатора 2. Наблюдателем 19 по напряжению сигнал U1 от датчика напряжения 1 преобразуют в двухфазные векторные сигналы U1α и U1β, причем U1α синфазен, а U1β ортогонален исходному сигналу U1 и являются проекциями вектора напряжения контактной сети Us на оси неподвижной системы координат (α, β). Нормализатором 21 преобразуют сигналы U1α и U1β соответственно в сигналы единичной амплитуды cosy, siny и подключают к одним из входов прямого преобразователя координат 22 и обратного преобразователя координат 23. Угол у определяет положение вектора напряжения контактной сети в неподвижной системе координат (α, β). Измеряют датчиком тока 4 ток вторичной обмотки трансформатора 2. Наблюдателем 20 по току сигнал i2 от датчика тока 4 преобразуют в двухфазные векторные сигналы i2α и i2β, при этом сигнал i2α синфазен, а сигнал i2β ортогонален исходному сигналу i2 и являются проекциями вектора тока вторичной обмотки трансформатора 2 на оси неподвижной системы координат (α, β). Прямым преобразователем координат 22 по сигналам i2α и i2β и по сигналам единичной амплитуды cosy, siny нормализатора 21 вычисляют активную i2d и реактивную i2q составляющие тока i2 во вращающейся системе координат (d, q). Таким образом происходит переход от однофазной скалярной системы в двухфазную векторную, что позволяет перейти от гармонически изменяющихся во времени сигналов к постоянным и вычислять активную и реактивную составляющие сигналов, регулирование которых осуществляют по отдельным независимым каналам: канал регулирования активного тока и канал регулирования реактивного тока.
Заданное значение постоянного напряжения и задание по реактивному току  формируют системой управления электровоза (на Фиг.2 не показана) в зависимости от режима работы. Изменением этих величин достигается формирование необходимого напряжения на выходе четырехквадрантного преобразователя 5 и фазового сдвига между первыми гармониками тока и напряжения контактной сети. В режиме тяги электровоза задают реактивную составляющую тока равной нулю (=0), при этом системой управления 11 будет отработан нулевой (0 эл.градусов) фазовый сдвиг между током и напряжением на входе четырехквадрантного преобразователя 5, что соответствует потреблению активной энергии из контактной сети. В режиме электрического тормоза асинхронный тяговый двигатель переходит в генераторный режим и начинает заряжать емкостной фильтр 8, при этом возрастает напряжение Udc. Напряжение Udc начинает превышать заданное значение что ведет к изменению полярности сигнала на выходе блока сравнения 12 по напряжению и соответственно сигналов на выходах регулятора напряжения 13
формируют системой управления электровоза (на Фиг.2 не показана) в зависимости от режима работы. Изменением этих величин достигается формирование необходимого напряжения на выходе четырехквадрантного преобразователя 5 и фазового сдвига между первыми гармониками тока и напряжения контактной сети. В режиме тяги электровоза задают реактивную составляющую тока равной нулю (=0), при этом системой управления 11 будет отработан нулевой (0 эл.градусов) фазовый сдвиг между током и напряжением на входе четырехквадрантного преобразователя 5, что соответствует потреблению активной энергии из контактной сети. В режиме электрического тормоза асинхронный тяговый двигатель переходит в генераторный режим и начинает заряжать емкостной фильтр 8, при этом возрастает напряжение Udc. Напряжение Udc начинает превышать заданное значение что ведет к изменению полярности сигнала на выходе блока сравнения 12 по напряжению и соответственно сигналов на выходах регулятора напряжения 13  и регулятора активного тока 15 (U2d). При этом система управления 11 будет ограничивать напряжение Udc на заданном уровне и одновременно формировать фазовый сдвиг между током и напряжением на входе четырехквадрантного преобразователя 5, равный 180 эл. градусов, при котором контактная сеть будет потреблять активную энергию с емкостного фильтра 8.
и регулятора активного тока 15 (U2d). При этом система управления 11 будет ограничивать напряжение Udc на заданном уровне и одновременно формировать фазовый сдвиг между током и напряжением на входе четырехквадрантного преобразователя 5, равный 180 эл. градусов, при котором контактная сеть будет потреблять активную энергию с емкостного фильтра 8.
Система управления 11 четырехквадрантным преобразователем 5 позволяет поддерживать требуемые технические характеристики, такие как коэффициент мощности, напряжение и амплитуда пульсаций на выходе четырехквадрантного преобразователя 5 в статических и динамических режимах работы. Управление по двум независимым каналам повышает точность регулирования в сравнении с прототипом, где регулятор реактивного тока управляет регулятором активного тока посредством аддитивной составляющей реактивного тока.
Предлагаемый способ управления четырехквадрантным преобразователем реализован в опытном образце тягового преобразователя для двухсистемного электровоза и показал свою надежность и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления активным двунаправленным преобразователем частоты | 2015 |
|
RU2628666C2 |
| ПРЕОБРАЗОВАТЕЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОСНАБЖЕНИЯ СОБСТВЕННЫХ НУЖД ТЕПЛОВОЗА | 2014 |
|
RU2556236C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО УСТАНОВОЧНОГО ОРГАНА, ВЫПОЛНЯЮЩЕГО РОЛЬ ПРЕОБРАЗОВАТЕЛЯ ТОКА СЕТИ | 1995 |
|
RU2145726C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2009 |
|
RU2383984C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ФОРМЫ НАПРЯЖЕНИЯ ПОТРЕБИТЕЛЯ | 2010 |
|
RU2442273C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2000 |
|
RU2187185C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ФОРМЫ НАПРЯЖЕНИЯ ПОТРЕБИТЕЛЯ | 2007 |
|
RU2339142C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ФОРМЫ НАПРЯЖЕНИЯ ПОТРЕБИТЕЛЯ | 2006 |
|
RU2310962C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2004 |
|
RU2282295C2 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
Изобретение относится к области электротехники и может быть использовано для преобразования переменного тока в постоянный с последующим преобразованием в переменный для питания электроприводов электровозов переменного тока. Технический результат - повышение энергетических показателей (коэффициент мощности) тягового электропривода электровоза за счет повышения точности управления четырехквадрантным преобразователем. В способе управления четырехквадрантным преобразователем блоком широтно-импульсной модуляции вырабатывают импульсы управления, формируют заданное значение выходного постоянного напряжения и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети, измеряют однофазные напряжение первичной и ток вторичной обмотки трансформатора. Наблюдателями преобразуют их в двухфазные векторные сигналы в неподвижной системе координат. Сигналы с наблюдателя по напряжению нормализатором преобразуют в сигналы единичной амплитуды, по которым совместно с сигналами наблюдателя по току прямым преобразователем координат вычисляют активную и реактивную составляющие тока во вращающейся системе координат, регулирование которых осуществляют по отдельным независимым каналам соответственно регуляторами активного и реактивного токов, выходные сигналы которых совместно с сигналами нормализатора обратным преобразователем координат управляют блоком широтно-импульсной модуляции. 2 ил.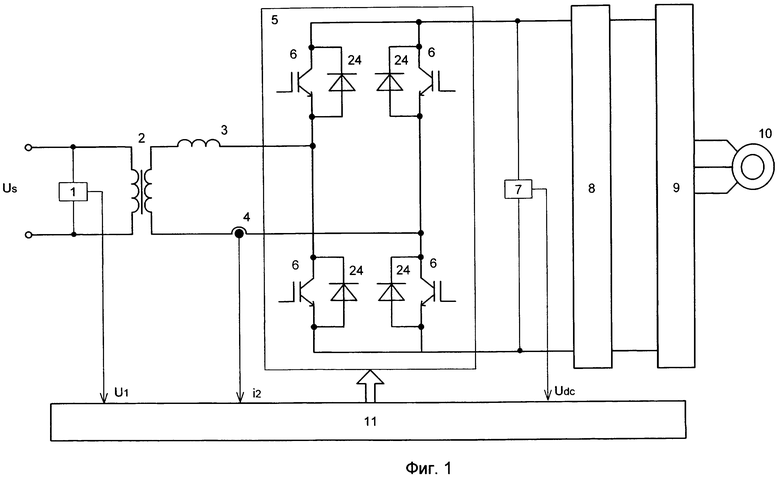
Способ управления четырехквадрантным преобразователем электровоза, заключающийся в том, что трансформированное напряжение контактной сети четырехквадрантным преобразователем преобразуют в регулируемое постоянное напряжение, которым питают через емкостной фильтр и автономный инвертор напряжения асинхронный тяговый двигатель, при этом измеряют постоянное напряжение на выходе четырехквадрантного преобразователя, сравнивают его с заданным значением и подают на вход регулятора напряжения, которым формируют заданное значение активной составляющей тока, сравнивают с вычисленным значением активной составляющей тока и подают на вход регулятора активного тока, вычисляют разность между заданием по реактивному току и вычисленным значением реактивной составляющей тока и подают на регулятор реактивного тока, а блоком широтно-импульсной модуляции вырабатывают импульсы управления четырехквадрантным преобразователем, по которым формируют заданное значение выходного постоянного напряжения и устанавливают желаемый фазовый сдвиг между первыми гармониками тока и напряжения контактной сети, отличающийся тем, что измеряют однофазные напряжение первичной и ток вторичной обмоток трансформатора, которые наблюдателями по напряжению и току соответственно преобразуют в двухфазные векторные сигналы в неподвижной системе координат, при этом сигналы с наблюдателя по напряжению нормализатором преобразуют в сигналы единичной амплитуды, по которым совместно с сигналами наблюдателя по току прямым преобразователем координат вычисляют активную и реактивную составляющие тока во вращающейся системе координат, регулирование которых осуществляют по отдельным независимым каналам соответственно регуляторами активного и реактивного токов, выходные сигналы которых совместно с сигналами нормализатора обратным преобразователем координат управляют блоком широтно-импульсной модуляции.
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД МНОГОСИСТЕМНОГО ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2248892C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО УСТАНОВОЧНОГО ОРГАНА, ВЫПОЛНЯЮЩЕГО РОЛЬ ПРЕОБРАЗОВАТЕЛЯ ТОКА СЕТИ | 1995 |
|
RU2145726C1 |
| US 7480160 B2, 20.01.2009 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 0 |
|
SU408167A1 |
| EP 784375 A3, 16.07.1997 | |||
| WO 2006015936 A1, 16.02.2006. | |||

