Настоящее изобретение имеет отношение к фазовому способу точного определения (установления, оценки) уровня L жидкости при помощи сигналов радара, излучаемых в направлении поверхности жидкости, и сигналов радара, отраженных от поверхности жидкости.
Настоящее изобретение также имеет отношение к устройству для точного определения уровня жидкости при помощи способа в соответствии с настоящим изобретением, причем указанное устройство содержит по меньшей мере одну радиолокационную антенну, расположенную над жидкостью, для излучения сигналов радара в направлении к жидкости и для приема сигналов радара, отраженных от поверхности жидкости, а также средство определения уровня жидкости на основании излученных сигналов радара и отраженных сигналов радара.
Радар (радиолокатор) широко используют для бесконтактного измерения расстояния. Хорошо известный способ измерения основан на принципе нахождения временной задержки. В соответствии с этим способом, радиолокационная антенна излучает сигнал радара, который соударяется с объектом, например с поверхностью жидкости. Объект отражает часть излученного сигнала/волны радара назад, в направлении радиолокационной антенны, которая принимает отраженный сигнал/ волну радара.
Несмотря на то что можно использовать отдельные радиолокационные антенны для излучения сигнала радара и для приема отраженного сигнала радара, обычной практикой является использование одной и той же радиолокационной антенны как для излучения, так и для приема. Радиолокационная станция (РЛС) измеряет временную задержку Δt между излученным сигналом радара и принятым сигналом радара. Если известна скорость излученного сигнала радара, расстояние до поверхности жидкости может быть определено очень просто, с использованием соответствующих средств измерения.
Устройство, аналогичное описанному, в котором используют описанный выше принцип измерения, часто применяют для точного определения при помощи сигналов радара уровня жидкости, например воды или масла, в резервуаре-хранилище в обрабатывающей промышленности или на нефтеперегонных заводах. Сигналы радара, которые используют, обычно являются импульсными сигналами радара.
Известные в настоящее время способы основаны, в частности, на измерении разности фаз между излученным сигналом радара и отраженным сигналом радара. Однако действительная разность фаз не может быть измерена при помощи приемников РЛС, которые обычно используют. В результате недостаточной надежности и неточности определения измеряемой разности фаз невозможно определить однозначное и достоверное значение действительного уровня жидкости.
Задачей способа в соответствии с настоящим изобретением является устранение указанного выше недостатка и использование более точного принципа измерения, позволяющего учитывать вышеуказанные неточности способов измерения, которые широко используют в настоящее время. Для решения этой задачи предлагается способ в соответствии с настоящим изобретением, который включает в себя следующие операции:
i) излучение сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i, …, в направлении к поверхности жидкости во временной последовательности;
ii) прием сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i, …, отраженных от поверхности жидкости во временной последовательности;
iii) определение разности фаз Δφ1, Δφ2, … между излученными сигналами радара и отраженными сигналами радара;
iv) определение уровня L частично на основании определенной разности фаз.
Более конкретно, предлагается способ в соответствии с настоящим изобретением, отличающийся тем, что операция iv) содержит следующие операции:
v) определение разности частот Δf1-2,… между последовательными излученными сигналами радара, имеющими частоты f1, f2,…;
vi) определение фазового сдвига Δψ1-2,… между последовательными установленными (определенными) разностями фаз Δφ1, Δφ2,….
В соответствии с настоящим изобретением, затем менее точное значение уровня L' определяют в операции vii) на основании разности Δf1-2 частот и фазового сдвига Δψ1-2, определенных в операциях v) и vi).
После этого может быть определена действительная разность фаз за счет вычисления показателя k между излученными сигналами радара и отраженными сигналами радара в операции viii) в соответствии с настоящим изобретением на основании менее точного значения уровня L', определенного в операции vii), на основании чего определяют с высокой степенью точности действительную разность фаз для уровня L жидкости на основании показателя k, определенного в операции viii), и разности фаз, определенной в операции iii).
Это позволяет получить более точную картину действительного уровня жидкости, чем это было возможно с использованием известных способов измерения. Основанный на определении фазы способ обработки сигнала позволяет реализовать измерение уровня с допустимым пределом погрешности менее 1 мм. В соответствии с настоящим изобретением предлагается использовать разности фаз сигналов радара на различных частотах.
В соответствии с предлагаемым способом измерения, уровень L определяют в соответствии с уравнением:
L=Δφ1tv/(4πf1), в котором
v представляет собой скорость прохождения сигнала радара через среду;
f1 представляет собой частоту сигнала радара;
Δφ1t представляет собой действительную разность фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1.
В соответствии с указанным способом, сначала проводят неточное измерение уровня, причем неточный уровень L' определяют в соответствии с уравнением:
L'=Δψ1-2v/(4πΔf1-2), в котором
Δf1-2 - разность частот между сигналами радара f1 и f2;
Δψ1-2 - фазовый сдвиг между разностями фаз Δφ1 иΔφ2.
Действительную разность фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1, определяют в соответствии с выражением:
Δφ1t=Δφ1+2kπ, в котором
Δφ1t представляет собой измеренную разность фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1;
k представляет собой показатель.
Показатель k может быть определен при помощи способа измерения в соответствии с настоящим изобретением на основании выражения  после чего может быть проведено определение действительной разности фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1, на основании чего может быть проведено измерение действительного уровня L.
после чего может быть проведено определение действительной разности фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1, на основании чего может быть проведено измерение действительного уровня L.
Предлагается устройство в соответствии с настоящим изобретением, отличающееся тем, что в нем используют радиолокационную антенну для излучения сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i, …, в направлении к поверхности жидкости во временной последовательности; а также для приема сигналов радара, имеющих частоты f1, f2,… и фазы φij, отраженных от поверхности жидкости во временной последовательности; причем предусмотрено средство для определения разности фаз Δφ1, Δφ2,… между излученным сигналом радара и отраженными сигналами радара и для определения уровня L частично на основании определенной (найденной) разности фаз.
Более конкретно, указанное средство служит для определения разности частот Δf1-2,… между последовательными излученными сигналами радара, имеющими частоты f1, f2,…, и для определения фазового сдвига Δψ1-2,… между последовательно определенными разностями фаз Δφ1, Δφ2, …, причем указанное средство позволяет получить менее точное значение уровня L' на основании определенной разности частот Δf1-2 и фазового сдвига Δψ1-2, и дополнительно получить показатель k между излученными сигналами радара и отраженными сигналами радара на основании менее точного значения уровня L'.
Аналогично описанному здесь выше способу измерения указанное средство в соответствии с настоящим изобретением позволяет определять уровень L на основании определенного показателя k и определенной разности фаз.
Способ и устройство в соответствии с настоящим изобретением будут описаны далее более подробно со ссылкой на чертежи.
Как уже было указано здесь выше, настоящее изобретение имеет отношение к основанному на определении фазы способу определения уровня жидкости надежным и очень точным образом. В предложенном способе используют сигналы радара для определения уровня продукта, который хранится, например, в резервуаре-хранилище, причем наличие препятствий разного рода или отсеков в резервуаре не ухудшает способ измерения.
В соответствии с хорошо известным принципом, для измерения уровня используют импульсные сигналы радара. На фиг.1 схематично показано устройство для определения уровня жидкости в резервуаре в соответствии с этим известным принципом измерения. Устройство 10 расположено в верхней части резервуара 1, который имеет стенки 1а, крышу 1b и дно 1с. Высота резервуара 1 обозначена буквой Н.
В резервуаре 1 находится некоторое количество жидкости 2, причем высота уровня 3 жидкости обозначена буквой L.
Устройство 10 имеет по меньшей мере одну радиолокационную антенну 12, которая имеет излучающую поверхность 11 для излучения сигнала 4а радара в направлении поверхности 3 жидкости. Сигнал 4а радара частично отражается от поверхности 3 жидкости и отраженный сигнал 4b радара в свою очередь перехватывается радиолокационной антенной 12. Само собой разумеется, что можно также использовать отдельную антенну для излучения сигналов радара в направлении к поверхности жидкости и отдельный приемник (с приемной антенной. - Прим. переводчика) для перехвата отраженных сигналов радара.
Устройство 10 в соответствии с известным уровнем техники также снабжено средством для определения уровня 3 жидкости (L) на основании излученного сигнала 4а радара и отраженного сигнала 4b радара, причем измерительная система основана на определении временной задержки Δt между излученным импульсом сигнала и принятым импульсом сигнала. Так как скорость сигнала радара известна, расстояние до измеряемого объекта или, в этом случае, до поверхности жидкости может быть определено в соответствии с выражением:

в котором
Н - высота резервуара [м]
L - расстояние между радиолокационной антенной и поверхностью жидкости [м]
h - высота поверхности жидкости [м],
v - скорость распространения волн радара через среду [м/с]
Δt - временная задержка между излученным сигналом радара и отраженным сигналом радара [с].
Недостаток измерения уровня с использованием импульсных сигналов радара заключается в том, что точность измерения времени между излученным сигналом радара и принятым сигналом радара должна быть очень высокой. Неточное измерение времени неизбежно ведет к погрешности измерения уровня. Точность измерения с использованием импульсных сигналов радара зависит, среди прочего, от формы импульса сигнала радара и, возможно, от амплитуды импульса. В дополнение к этому, отражения сигнала радара от других объектов (кроме поверхности жидкости) создают помехи при таком способе измерения.
В более совершенном способе используют частотную модуляцию (радар с частотной модуляцией незатухающей волны, с непрерывным ЧМ-сигналом), когда частоту сигнала радара изменяют во времени. Сигнал радара может иметь, например, треугольную форму, как это показано на фиг.3. В результате временной задержки, вызванной прохождением расстояния между антенной и заданной поверхностью, возникает разность частот fbeat между излученным сигналом 4а радара и отраженным сигналом 4b радара. Указанная частота fbeat может быть вычислена при помощи преобразования Фурье (см. фиг.4). Расстояние L с использованием треугольного сигнала может быть определено по формуле;

в которой
fm - частота модуляции [Гц],
ΔF - полоса частоты качания [Гц],
fbeat - частота биений между излученным сигналом радара и принятым сигналом радара [Гц],
ν - скорость распространения сигналов радара через среду [м/с].
Технология с использованием непрерывного ЧМ-сигнала не имеет недостатков импульсного измерения радара. Измерение временной задержки заменено более точным измерением частоты. Можно использовать быстрое преобразование Фурье (БПФ) при цифровой обработке сигнала, чтобы получить спектральную плотность мощности (PSD), в которой распределение мощности в полосе частот сигнала биений имеет единственный пик. Если происходят отражения, вызванные присутствием объектов (препятствий) на пути сигналов, то эти отражения будут проявляться как множество пиков в графике PSD, как это показано на фиг.4. Обычный программно-реализованный алгоритм может быть использован для определения частоты fbeat правильно выбранного пика, который соответствует отражению от поверхности жидкости.
Однако описанный выше способ измерения с использованием непрерывного ЧМ-сигнала радара имеет ряд существенных недостатков. Прежде всего, требуется обеспечить высокую стабильность наклона частоты качаний, который должен быть постоянным с высокой точностью. Во-вторых, трудно поддерживать высокую линейность формы качаний, так что средняя частота полосы частот является неточной. В-третьих, расчет при помощи преобразования Фурье точного центра частоты биений очень сильно зависит от влияния отражений (показанных как 4' на фиг.1), вызванных такими препятствиями, как мешалки резервуара (показанные как 5 на фиг.1 и снабженные перемешивающим элементом 5а), дно (1 с) резервуара, стенка (1а) резервуара, стремянки, теплообменники, привод, причем все это может приводить к погрешностям в диапазоне несколько миллиметров.
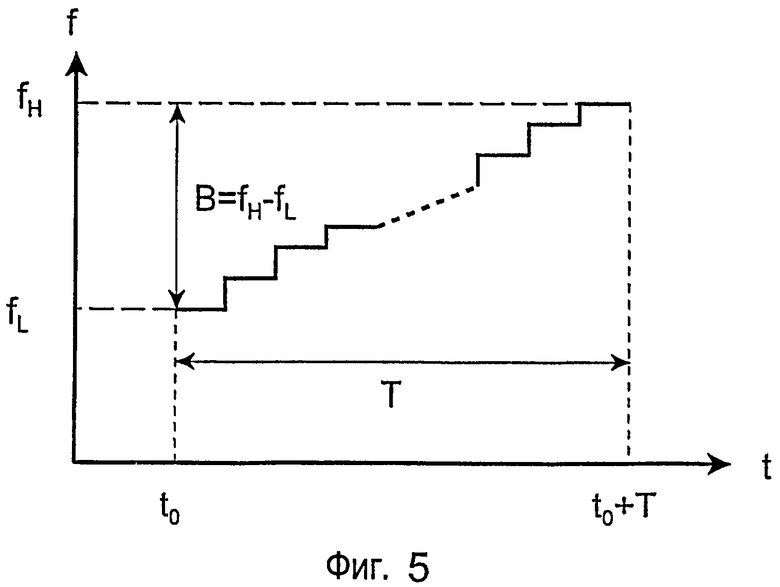
Для решения указанных проблем была разработана техника измерений, называемая как ступенчатая частота - незатухающая волна (SF-CW). При использовании способа SF-CW радар излучает и принимает группы синусоидальных сигналов с дискретными частотами, которые заполняют полосу частот, что требуется для измерения и контроля (фиг.5). При использовании радиолокационной станции, реализующей способ SF-CW, заданное расстояние может быть установлено за счет определения зависимости фазы от расстояния в соответствии с выражением:

в котором
Δφt - разность фаз между опорным сигналом и отраженным сигналом,
L - расстояние между радиолокационной антенной и измеряемым объектом [м],
f - одна из 'дискретных' частот [Гц],
v - скорость распространения волн радара через среду [м/с].
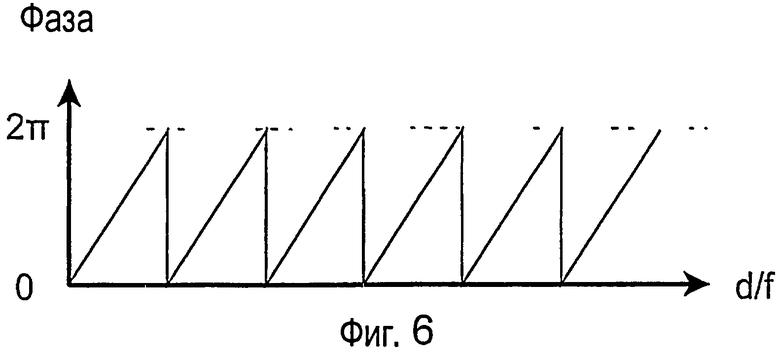
Эта действительная разность фаз Δφt не может быть измерена непосредственно при помощи радара по причине фазовой неопределенности 2π и неточного распределения фазовой характеристики. Измеренная разность фаз представлена как Δφw. Обычно фазовый сигнал представляет собой синусоидальный сигнал, например, такой как cos(Δφw) или sin(Δφw). Так как sin(Δφ)=sin(Δφ+2kπ), где k представляет собой целое число, то точная информация теряется. Так как точное значение k неизвестно, измерение также становится неточным. Показатель k представляет собой так называемый показатель свертки, который приводит к неточности фазы свертки Δφw (см. также фиг.6). В случае дискретного сигнала эта фаза может быть выражена как:

В выражении (4) k представляет собой целое число, так что 0<Δφw<2kπ. Неточность, вызванная значением показателя k, может быть лучше всего показана выражением расстояния L в функции показателя k:

Например, устройства для измерения уровня с использованием радара работают главным образом в диапазоне частот 8-12.5 ГГц (полоса X). Частота 10 ГГц соответствует длине волны λ, составляющей 30 мм в вакууме. Если показатель k изменяется на 1, это соответствует изменению расстояния на 15 мм. Таким образом, показатель k имеет большое значение для точного измерения величины уровня L расстояния.
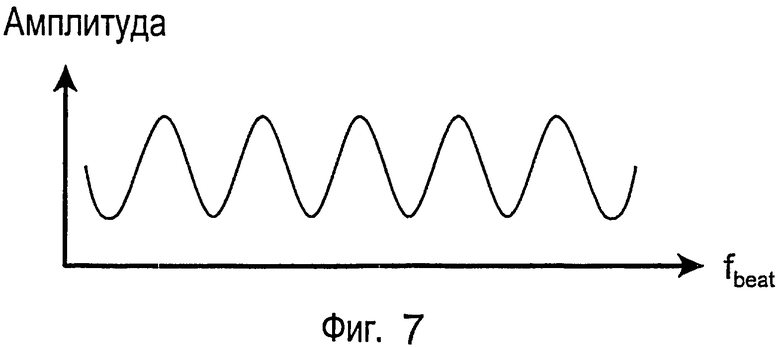
В оцифрованных данных неопределенность фазы может быть вычислена на центральной частоте или на средней частоте полосы частот. В соответствии с обычным способом (так называемым PSD способом, как уже было описано здесь выше) определения расстояния L с использованием cos(Δtpw) сигнала, определяют число периодов синусоидального колебания во время измерения частоты, как это показано на фиг.7. Это соответствует преобразованию Фурье в PSD способе. Таким образом, расстояние может быть определено в соответствии с выражением:

в котором m равно числу периодов сигнала. При использовании основанного на амплитуде (PSD) исходного расстояния LPSD коэффициент неопределенности показателя k может быть определен на основании выражения:

Коэффициент int[..] представляет собой коэффициент округления, который округляет k до ближайшего целого числа. При использовании показателя k, полученного при помощи коэффициента неопределенности (показателя свертки), основанное на нормальной фазе расстояние LCONV может быть получено аналогично (5):

Однако, если погрешность основанного на PSD расстояния LPSD превышает четверть длины волны, то есть 7.5 мм при 10 ГГц, это ведет к ошибке коэффициента неопределенности kPSD и, соответственно, к погрешности фазового расстояния LCONV, причем погрешность величины (magnitude) в несколько раз превышает погрешность половины длины волны. Это означает, что точность основанного на нормальной фазе уровня сильно зависит от основанного на PSD уровня. Хорошо известно, что основанный на PSD способ является чувствительным к различным помехам. Если мешающий объект присутствует на пути луча радара, то велика вероятность появления ошибки величины, составляющей десятые доли миллиметра, при основанном на PSD измерении уровня. Мешающими объектами или препятствиями могут быть, например, стенка 1а, дно 1с и т.п. резервуара-хранилища 1, а также мешалки (5-5а), тепловые змеевики или стремянки, см. фиг.1.
Было обнаружено, что погрешность всего несколько % поблизости от пика PSD спектра уже достаточна для возникновения неопределенности показателя kPSD. В дополнение к этому, помехи от расположенной поблизости антенны также могут приводить к существенным погрешностям, если уровень среды в резервуаре-хранилище поднимается и приближается к антенне. Обычно используемый PSD способ является очень восприимчивым к помехам, что снижает стабильность и точность процесса вычисления. В результате, погрешность содержит "скачок (leap) уровня", соответствующий половине длины волны при нормальном (обычном) основанном на фазе способе, который составляет 15 мм по ширине полосы X. Такие скачки уровня крайне нежелательны в некоторых применениях.
Более того, в некоторых известных основанных на непрерывном ЧМ-сигнале и/или на SF-CW фазовых методах измерениях используют относительное фазовое измерение для корректировки изменения расстояния между двумя последовательными измерениями:

в котором
L0 - исходное расстояние [м],
ΔL1, ΔL2 - разность расстояний между двумя последовательными измерениями [м].
Следует иметь в виду, что накопление погрешностей может приводить к очень большим погрешностям, даже если существует только один коэффициент неопределенности в виде LPSD. Таким образом, низкая степень защищенности вычисления расстояния на основании нормальной фазы усугубляется неточностью основанного на PSD способа, что приводит к низкой точности.
Задачей способа в соответствии с настоящим изобретением является нейтрализация этой погрешности измерения. Из приведенного выше выражения (3), если известна действительная фаза для одной или нескольких частот, можно определить абсолютное расстояние (L) до мишени на основании выражения:

Известная характеристика SF-CW радара с цифровым управлением состоит в том, что известна каждая ступень генерируемой частоты. В соответствии с настоящим изобретением, в способе используют вариации фазы при различных частотах, чтобы исключить фазовую неопределенность половины длины волны и, таким образом, точно определить абсолютное расстояние L. Способ в соответствии с настоящим изобретением связан с использованием измеренной или образованной фазы для двух различных частот, для грубого определения расстояния на основании выражения:

в котором Δf=f1-f2 и Δψw=Δφw(f1)-Δφw(f2). Целое число k затем может быть определено при помощи измеренного грубого уровня Lcoarse в соответствии с выражением:

В этом случае, коэффициент int[..] также представляет собой коэффициент округления, который округляет k до ближайшего целого числа. Таким образом, фаза и целое число k могут быть использованы для определения абсолютной фазы между излученным сигналом радара и отраженным сигналом и, следовательно, для определения абсолютного очень точного уровня LINV расстояния:

Способ измерения в соответствии с настоящим изобретением можно характеризовать как независимый, основанный на фазе способ обработки сигнала. С использованием описанного здесь выше способа могут быть получены очень надежные и воспроизводимые точности ±1 мм или лучше, даже в сложных условиях измерения.
Следовательно, в способе в соответствии с настоящим изобретением не используют известную менее точную спектральную плотность мощности PSD в качестве опоры для исключения неопределенности фазы. В отличие от известных способов, в способе в соответствии с настоящим изобретением не используют изменение относительного фазового расстояния по отношению к предшествующему измерению, которое влияет на текущее расстояние. В этом способе производят вычисление абсолютной фазы и расстояния при каждом измерении, что позволяет осуществлять абсолютное измерение текущего заданного расстояния. Таким образом, за счет использования этого способа накопление фазовой ошибки от предыдущих измерений полностью исключается.
В соответствии с настоящим изобретением, средство 13 определения уровня устройства 10, показанного на фиг.1, дополнительно содержит блок 13а обработки данных, который позволяет определять разность фаз Δφ1, Δφ2, … между излученными сигналами 4а и отраженными сигналами 4b радара и получать уровень L, частично на основании определенной разности фаз, в соответствии с операциями способа в соответствии с настоящим изобретением.
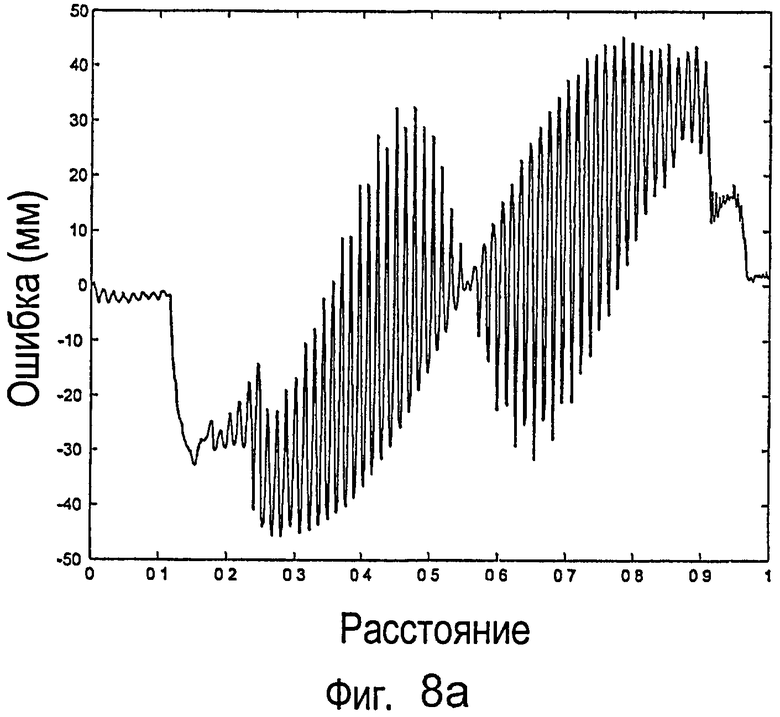
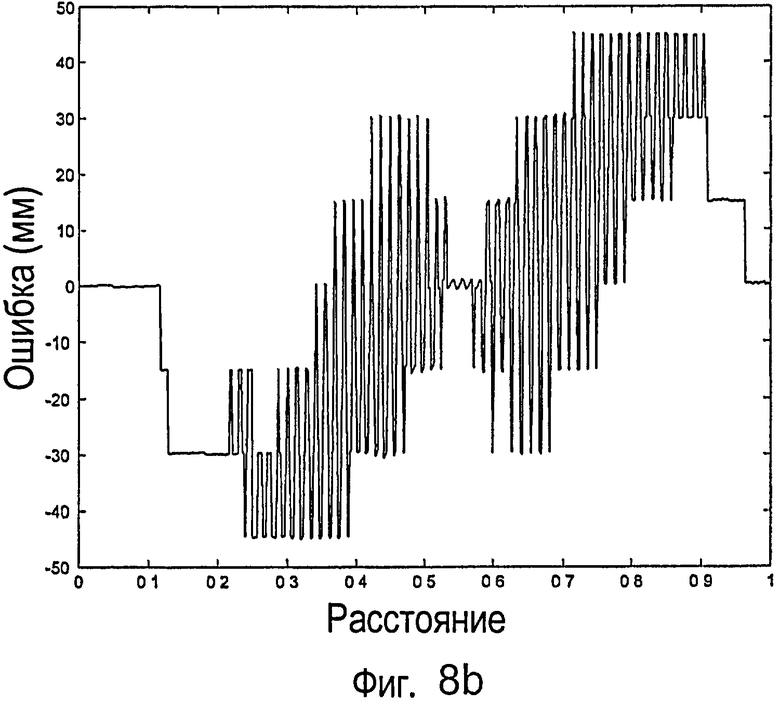
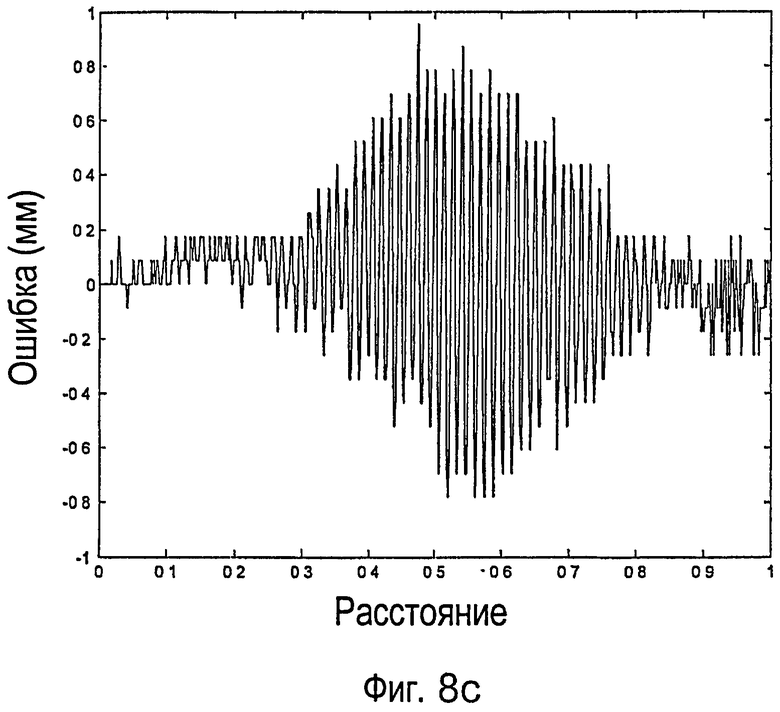
Результаты нескольких испытаний или данные измерений показаны на фиг.8, 9 и 10. Результаты испытания для оценки препятствия показаны на фиг.8а-8b-8с.
Указанное так называемое испытание для оценки препятствия проводят для того, чтобы определить наличие нежелательных объектов, которые имеются на пути луча радара при измерении мишени. Указанными нежелательными объектами могут быть мешалки 5-5а, стремянки, тепловые змеевики, дно 1с резервуара, стенка 1а резервуара, и т.п. (см. фиг.1). Эти нежелательные объекты или препятствия могут создавать электромагнитные помехи при нормальном обнаружении мишени и измерениях мишени.
Для пояснения указанного, на фиг.8а-8с показаны результаты испытаний, полученные с использованием различных способов определения уровня в резервуаре-хранилище, а именно: известного основанного на амплитуде способа (фиг.8а, погрешность измерения уровня LPSD с использованием PSD амплитудного способа); основанного на фазе способа (на фиг.8b, погрешность измерения уровня LCONV с использованием нормального (обычного) фазового способа); и способа в соответствии с настоящим изобретением (на фиг.8с, погрешность измерения уровня с использованием способа в соответствии с настоящим изобретением LINV). Можно видеть, что точность и воспроизводимость нового независимого от фазы способа в соответствии с настоящим изобретением намного лучше, чем полученные при основанном на фазе способе и/или при основанном на PSD способе. Точность нового способа ориентировочно в 50 раз лучше точности известного способа.
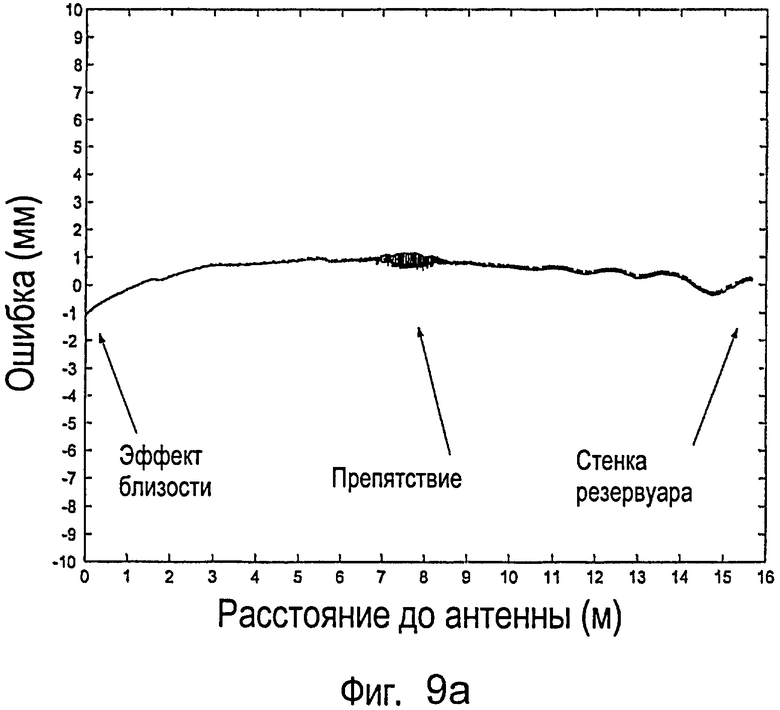
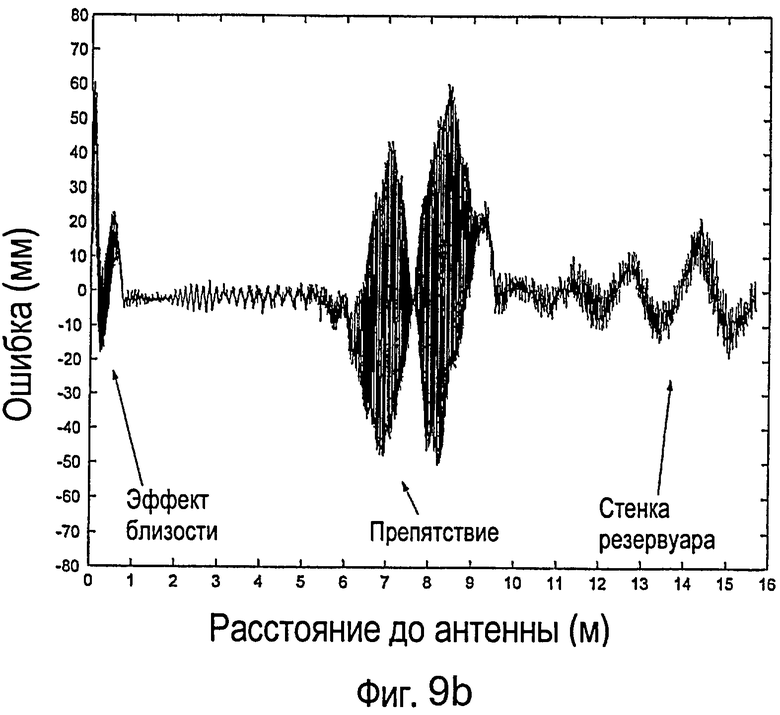
Испытания, направленные на оценку влияния стенки резервуара, препятствий и влияния близости показаны на фиг, 9а и на фиг.9b, где проведено сравнение точности способа в соответствии с настоящим изобретением (фиг.9а) с точностью известных основанных на PSD способов. Точность способа в соответствии с настоящим изобретением ориентировочно в 55 раз лучше точности известного способа.
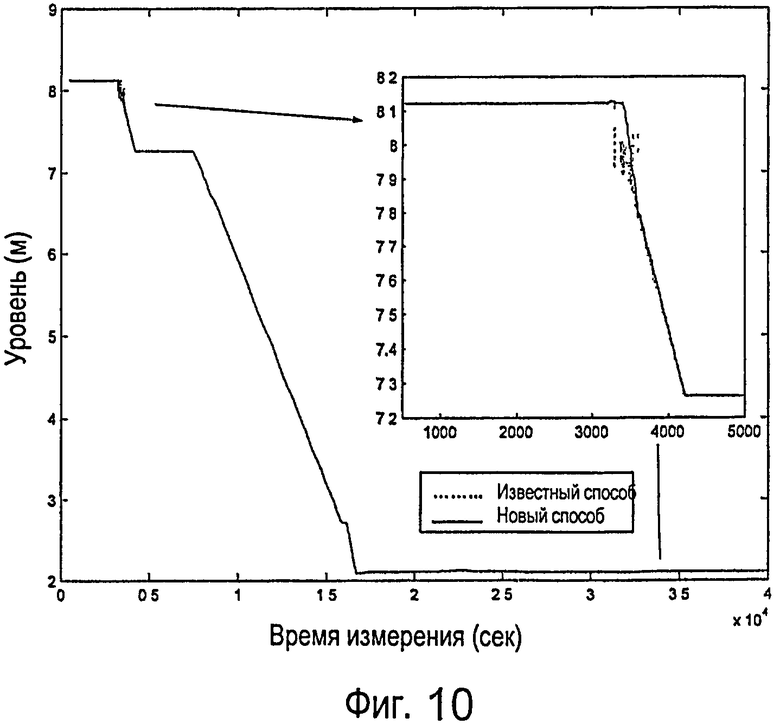
Результаты испытания, направленные на оценку влияния дна резервуара и препятствия (нагревательного элемента) у дна резервуара, показаны на фиг.10. Пустой резервуар был заполнен жидкостью. Отражение от дна резервуара оказывает существенное влияние на измерение уровня жидкости, проводимое при помощи известного способа, в то время как влияние на измерение уровня жидкости при помощи способа в соответствии с настоящим изобретением является только минимальным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ БОРТОВОЙ И НАЗЕМНОЙ ПРИЁМОПЕРЕДАЮЩИМИ СТАНЦИЯМИ | 2015 |
|
RU2587471C1 |
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| ДАЛЬНОМЕРНАЯ СИСТЕМА С ИЗМЕРЕНИЕМ ФАЗЫ РАДИОСИГНАЛА | 1990 |
|
RU2076333C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗ КОМПЛЕКСНЫХ ОГИБАЮЩИХ ОТРАЖЕННЫХ СИГНАЛОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ ОБЪЕКТА ДЛЯ ПОЛУЧЕНИЯ ЕГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2393500C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА | 1992 |
|
RU2036826C1 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2015 |
|
RU2595565C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| АКУСТОЭЛЕКТРОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2016406C1 |
| Способ одновременных полнополяризационных доплеровских измерений в СВЧ-диапазоне | 2021 |
|
RU2771834C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2402787C1 |
Изобретение относится к определению уровня жидкости. Сущность: определение уровня жидкости осуществляется при помощи сигналов радара, излучаемых в направлении поверхности жидкости, и сигналов радара, отраженных от поверхности жидкости. Устройство содержит по меньшей мере одну расположенную над жидкостью радиолокационную антенну для излучения сигналов радара в направлении жидкости и для приема сигналов радара, отраженных от поверхности жидкости, а также средство для определения уровня жидкости на основании излученных сигналов радара и отраженных сигналов радара. Технический результат: повышение точности измерения. 2 н. и 7 з.п. ф-лы, 13 ил.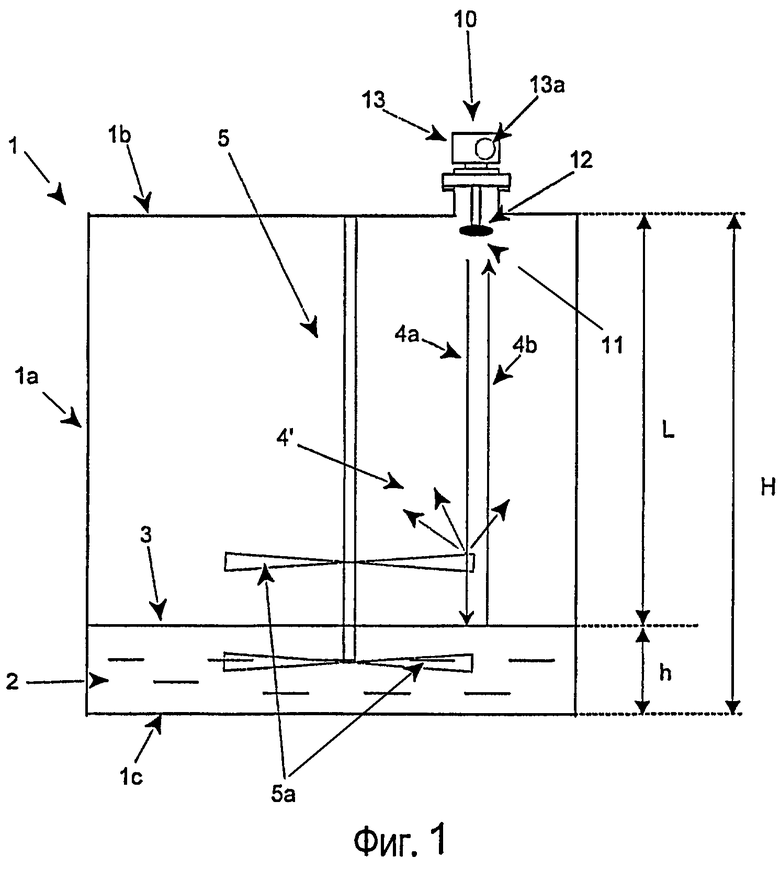
1. Способ определения уровня L жидкости при помощи сигналов радара, излученных в направлении поверхности жидкости, и сигналов радара, отраженных от поверхности жидкости, который включает в себя следующие операции:
i) излучение сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i…, в направлении к поверхности жидкости во временной последовательности;
ii) прием сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i,…, отраженных от поверхности жидкости во временной последовательности;
iii) определение разности фаз Δφ1, Δφ2,… между излученными сигналами радара и отраженными сигналами радара;
iv) определение уровня L частично на основании определенной разности фаз, отличающийся тем, что операция iv) включает в себя следующие операции:
v) определение разности частот Δf1-2, … между последовательными излученными сигналами радара, имеющими частоты f1, f2,…;
vi) определение фазового сдвига Δψ1-2,… между последовательными установленными разностями фаз Δφ1, Δφ2,…;
и тем, что дополнительно проводят операцию vii), в которой определяют на основании разности Δf1-2 частот и фазового сдвига Δψ1-2, определенных в операциях v) и vi) менее точное значение уровня L',
и дополнительно проводят операцию viii), в которой определяют показатель k между излученными сигналами радара и отраженными сигналами радара на основании менее точного значения уровня L', определенного в операции vii).
2. Способ по п.1, отличающийся тем, что фазу фильтруют для определения показателя k.
3. Способ по п.1 или 2, отличающийся тем, что дополнительно проводят операцию ix), в которой определяют уровень L на основании показателя k, определенного в операции viii), и разности фаз, определенной в операции iii).
4. Способ по п.1, отличающийся тем, что уровень L определяют в соответствии с выражением:
L=Δφ1tv/(4πf1), в котором
v - скорость сигнала радара через среду;
f1 - частота сигнала радара;
Δφ1t - действительная разность фаз между излученным сигналом радара и отраженным сигналом радара, имеющим частоту f1.
5. Способ по п.4, отличающийся тем, что значение уровня L' определяют в соответствии с выражением:
L'= Δψ1-2v/(4πΔf1-2), в котором
v - скорость прохождения сигнала радара через среду;
Δf1-2 - разность частот между сигналами радара f1 и f2;
Δψ1-2 - фазовый сдвиг между разностями фаз Δφ1 и Δφ2.
6. Способ по п.4 или 5, отличающийся тем, что действительную разность фаз определяют в соответствии с выражением:
Δφ1t=Δφ1+2kπ, в котором
Δφ1 представляет собой измеренную разность фаз между излученным сигналом радара и отраженным сигналом радара, имеющими частоту f1;
k представляет собой показатель.
7. Способ по п.6, отличающийся тем, что показатель k определяют в соответствии с выражением:
8. Устройство для осуществления способа по пп.1-7, которое содержит по меньшей мере одну радиолокационную антенну, расположенную над жидкостью, для излучения сигналов радара в направлении жидкости и приема сигналов радара, отраженных от поверхности жидкости, а также средство определения уровня жидкости на основании излученных сигналов радара и отраженных сигналов радара, отличающееся тем, что радиолокационная антенна выполнена с возможностью излучения сигналов радара, имеющих частоты f1, f2,… и фазы φ1i, φ2i,…, в направлении к поверхности жидкости во временной последовательности; а также приема сигналов радара, имеющих частоты f1, f2,… и фазы φ1j, отраженных от поверхности жидкости во временной последовательности; причем указанное средство определения уровня жидкости выполнено с возможностью определения разности фаз Δφ1, Δφ2, … между излученными сигналами радара и отраженными сигналами радара и получения уровня L частично на основании определенной разности фаз с возможностью определения разности частот Δf1-2,… между последовательно излученными сигналами радара, имеющими частоты f1, f2,…, и определения фазового сдвига Δψ1-2,… между последовательно определенными разностями фаз Δφ1, Δφ2… и с возможностью получения менее точного значения уровня L' на основании определенных разности частот Δf1-2 и фазового сдвига Δψ1-2, и выполнено с возможностью получения показателя k между излученными сигналами радара и отраженными сигналами радара на основании менее точного значения уровня L'.
9. Устройство по п.8, отличающееся тем, что указанное средство определения уровня жидкости выполнено с возможностью определения уровня L на основании определенного показателя k и определенной разности фаз.
| US 5406842 A, 18.04.1995 | |||
| US 2004196177 A1, 07.10.2004 | |||
| US 2005190098 A1, 01.09.2005 | |||
| US 5442359 A, 15.08.1995 | |||
| US 5774089 A, 30.06.1998. |

