Изобретение относится к измерительной технике и может применяться в интегральных акселерометрах и микрогироскопах с силовой компенсацией.
Известен чувствительный элемент акселерометра [1] и датчик момента. Недостатком его является сложность изготовления, поскольку датчик момента требует применения сердечника из магнитомягкой стали. Кроме того, устройство имеет большие массогабаритные размеры, в основном на порядок превышающие размеры интегральных акселерометров.
Известен также интегральный чувствительный элемент акселерометра [2], содержащий чувствительный к ускорениям маятник, выполненный в кремниевой пластине и соединенный с ней упругими подвесами, и электромагнитную систему силовой отработки. Устройство является сложным и неточным, поскольку в микроисполнении совмещает датчик момента и датчик угла.
Наиболее близким к заявляемому изобретению является интегральный чувствительный элемент компенсационного акселерометра [3], содержащий чувствительный к ускорениям маятник, выполненный в кремниевой пластине и соединенный с ней упругими подвесами, электромагнитную систему отработки воздействия ускорений.
Известный микросистемный компенсационный акселерометр имеет следующие недостатки:
1 - сложность конструкции, обусловленная применением двух различных материалов: для моментного датчика алюминиевые дорожки силовой обмотки и для датчика угла пермалоевые дорожки, расположенные в непосредственной близости от витков силовой обмотки;
2 - влияние поля силовой обмотки на проводники датчика угла;
3 - в прототипе применено два источника опорных напряжений: положительный и отрицательный;
4 - нелинейность силовой характеристики, т.к. по напряжению питания силовой обмотки характеристика является квадратичной.
Задачей, на решение которой направлено изобретение, является упрощение конструкции датчиков с силовой компенсацией за счет применения принципа притяжения (отталкивания) двух близко расположенных параллельных проводников и устранение квадратичной нелинейности по питанию электромагнитного датчика момента. Этот технический результат достигается тем, что в интегральный чувствительный элемент акселерометра, содержащий инерционную массу, выполненную в виде несимметричного маятника в кремниевой пластине и соединенную с ней упругими подвесами, электромагнитную систему обратной связи с интегральной возвращающей обмоткой, отличающийся тем, что согласно изобретению в устройство введен емкостный датчик перемещений, проводящий подвижный электрод которого совмещен с грузом разбаланса чувствительной массы и заземлен, неподвижные электроды емкостного датчика выполнены на стеклянных обкладках и посредством контактных площадок соединены со схемой, возвращающая обмотка выполнена из двух частей: подвижной и неподвижной, подвижная обмотка размещена на маятнике с обеих его сторон в виде витков меандра, причем витки на каждой из сторон маятника соединены так, что относительно оси качания ток течет по части обмотки в одну сторону, а с другой стороны - в обратном направлении, причем подвижная обмотка питается опорным напряжением, а неподвижная - выполнена на двух одинаковых стеклянных обкладках, жестко соединенных с кремниевой пластиной маятника, витки которой расположены строго против витков подвижной обмотки и соединены последовательно, на неподвижную обмотку заведена обратная связь с выхода акселерометра, величина шага между витками обмотки и величина зазора между подвижными и неподвижными обмотками должны отвечать следующему соотношению:
h/Δ≤10,
где h - зазор между подвижными и неподвижными обмотками, Δ - шаг между витками обмотки.
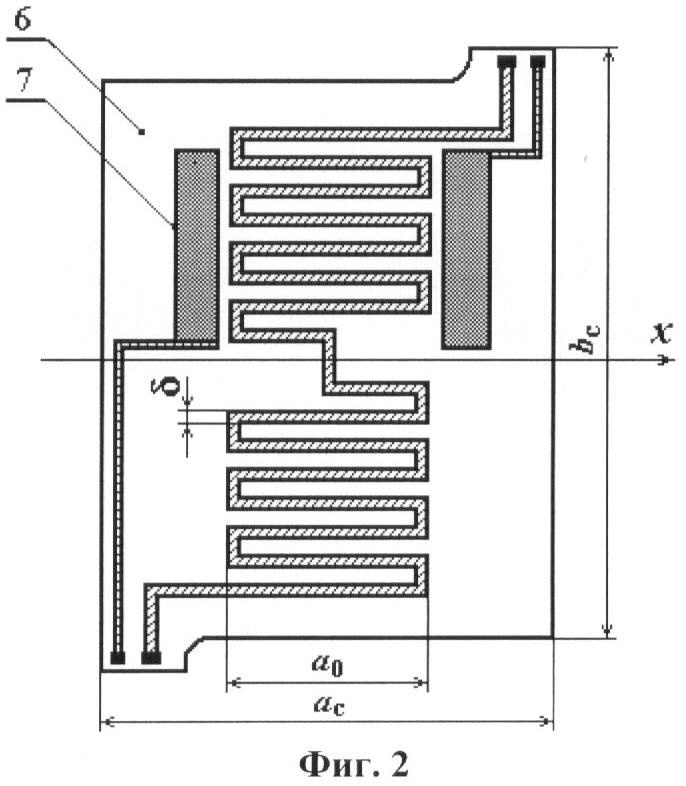
На фигуре 1 приведена кремниевая пластина 1, в которой методом микроэлектронной технологии инерционная масса в виде несимметричного маятника 2. Несимметрию маятнику придают грузы разбаланса 3, которые также выполнены как единое целое с маятником и одновременно служат подвижными электродами датчика перемещений. Маятник 2 соединен с корпусной пластиной 1 упругими подвесами-торсионами 4, работающими на кручение. В поперечном сечении подвесы-торсионы 4 представляют симметричный крест. После размерного травления маятника его окисляют с целью изоляции внешней поверхности от проводящего тела.
Проводники 5 электромагнитного преобразователя момента расположены на поверхности маятника 2 в виде меандра, и относительно оси качания (оси x) направление витков противоположное. Число зигзагов меандра определяется из расчета создания необходимого усилия силового преобразователя. Одни из концов проводников на маятнике соединены с проводящим телом маятника, а вторые - подключены к контактным площадкам для соединения с источником опорного напряжения. В связи с тем, что относительно оси качания в проводниках имеет место разное направление токов в предлагаемом изобретении применен всего один источник опорного напряжения. На обеих сторонах маятника проводники расположены идентично.
На фигуре 2 приведена одна из стеклянных обкладок 6, на которой выполнены неподвижные проводники электромагнитного преобразователя момента. Форма неподвижных силовых проводников на стеклянной обкладке 6 должна в точности повторять форму подвижных проводников 5 маятника 2, а после сборки подвижный и неподвижный электроды должны быть расположены друг против друга с зазором h. С целью снижения влияний поля силовых электродов на поле электродов преобразователя перемещений должно быть выполнено следующее соотношение:

где h - зазор между подвижными и неподвижными обмотками, Δ - шаг между витками обмотки.
Реализация демпфирования подвижного узла в компенсационном акселерометре с электромагнитной силовой отработкой возможна как с заполнением ЧЭ газом, например азотом, так и в электрическом контуре для случая вакуумирования чувствительного элемента.
Неподвижные электроды 7 датчика угла выполнены на стеклянной обкладке 6 посредством металлизации и соединены с помощью контактных площадок с электрической схемой акселерометра.
Работа заявляемого устройства осуществляется следующим образом. В нейтральном состоянии маятник 2 находится в среднем положении между неподвижными электродами 7 емкостного датчика перемещений. На выходе устройства сигнал равен нулю. Поскольку обмотка отработки, состоящая из подвижных 5 и неподвижных проводников, питается выходным напряжением, сила электромагнитного преобразователя равна нулю, и никакого влияния на маятник 2 не происходит.
При действии ускорения возникает сила инерции, отклоняющая маятник. Эта сила определяется произведением массы небаланса 3 на действующее ускорение

mнеб - массы небаланса 3 (на фигуре 1 показана затененной); j - действующее ускорение.
Угол отклонения маятника является пропорциональным действующему ускорению. Соответственно выходной сигнал является пропорциональным углу отклонения маятника и поступает на проводники отработки 5. Возникающая электромагнитная сила Fэл имеет противоположное направление по сравнению с направлением силы инерции.

µ0=1,257·10-5 Гн/м - магнитная постоянная; µ - относительная магнитная проницаемость для материала, находящегося между проводниками; I1 - сила тока в первом проводнике (в проводнике на маятнике); I2 - сила тока во втором проводнике (в проводнике на стеклянной обкладке); a 0 - длина проводника по одной стороне меандра, n - число волн меандра.
Сила тока в первом проводнике задается нагрузочным резистором и напряжением источника опорного напряжения, которое в основном влияет на точность задаваемого тока. Поскольку сила тока в первом проводнике является величиной постоянной, то этим осуществлена линеаризация характеристики. Сила тока во втором проводнике задается нагрузочным резистором и выходным напряжением. Величина ускорения, которое может отработать заявляемое устройство с электромагнитным датчиком момента, определяется следующим соотношением:

Источники информации
1. Патент на изобретение США №4483194, кл. 73/517, 1982.
2. Патент на изобретение РФ №2231795, М. кл. G01B15/08, от 10.12.10.
3. Вавилов В.Д. Интегральные датчики. Изд-во НГТУ, 2003, с.500.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2450278C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2426134C1 |
| ИМПУЛЬСНЫЙ МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2432578C2 |
| УСИЛИТЕЛЬ ОБРАТНОЙ СВЯЗИ ДЛЯ ИНТЕГРАЛЬНЫХ ДАТЧИКОВ | 2010 |
|
RU2431849C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2423712C1 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНТЕГРАЛЬНОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2526789C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2003 |
|
RU2242011C2 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490754C1 |
Изобретение относится к измерительной технике и может быть использовано в интегральных акселерометрах и микрогироскопах с силовой компенсацией. Чувствительный элемент содержит инерционную массу в виде несимметричного маятника, емкостной датчик перемещений, проводящий подвижный электрод которого совмещен с грузом разбаланса инерционной массы, и электромагнитную систему обратной связи с интегральной возвращающей обмоткой, которая выполнена из двух частей: подвижной и неподвижной. Подвижная обмотка размещена на маятнике с обеих сторон в виде витков меандра. Изобретение позволяет снизить массогабаритные характеристики за счет построения электромагнитного датчика силы без использования металлических сердечников при сохранении точностных характеристик, а также линеаризовать силовую характеристику за счет применения постоянного напряжения питания одного из проводников возвращающей обмотки. 2 ил.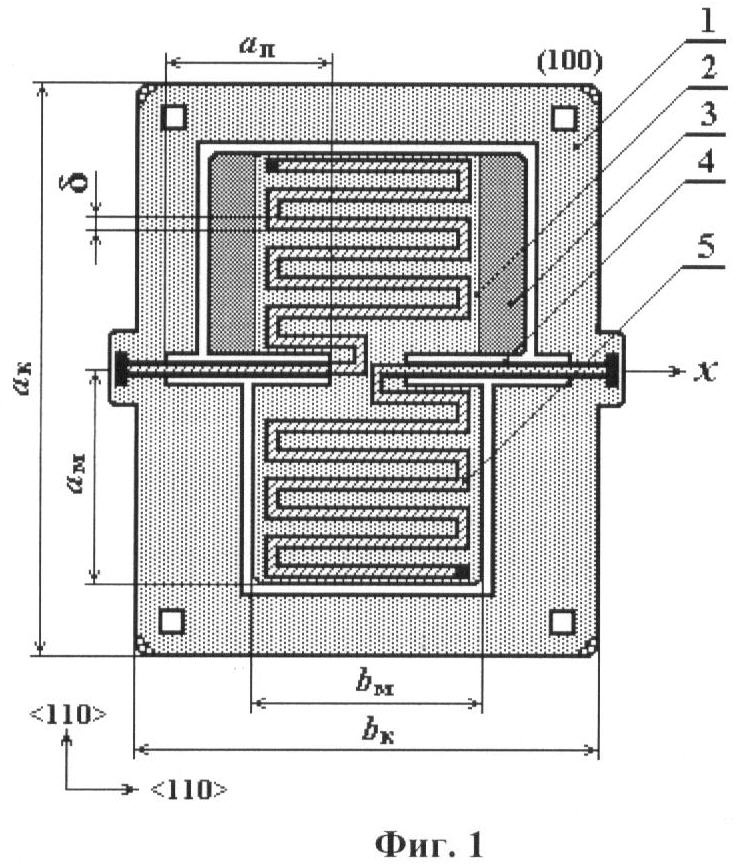
Интегральный чувствительный элемент акселерометра, содержащий инерционную массу, выполненную в виде несимметричного маятника в кремниевой пластине и соединенную с ней упругими подвесами, емкостный датчик перемещений и электромагнитную систему обратной связи с интегральной возвращающей обмоткой, отличающийся тем, что у емкостного датчика перемещений проводящий подвижный электрод совмещен с грузом разбаланса чувствительной массы и заземлен, неподвижные электроды емкостного датчика выполнены на стеклянных обкладках и посредством контактных площадок соединены со схемой, возвращающая обмотка выполнена из двух частей: подвижной и неподвижной, подвижная обмотка размещена на маятнике с обеих его сторон в виде витков меандра, причем витки на каждой из сторон маятника соединены так, что относительно оси качания ток течет по части обмотки в одну сторону, а с другой стороны - в обратном направлении, причем подвижная обмотка питается опорным напряжением, а неподвижная выполнена на двух одинаковых стеклянных обкладках, жестко соединенных с кремниевой пластиной маятника, витки которой расположены строго против витков подвижной обмотки и соединены последовательно, на неподвижную обмотку заведена обратная связь с выхода акселерометра, величина шага между витками обмотки и величина зазора между подвижными и неподвижными обмотками должны отвечать следующему соотношению
Δ/h≥10,
где Δ - шаг между витками обмотки, h - зазор между подвижными и неподвижными обмотками.
| ВАВИЛОВ В.Д | |||
| Интегральные датчики | |||
| - Нижний Новгород: изд-во НГТУ, 2003, с.248-251 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНТЕГРАЛЬНОГО АКСЕЛЕРОМЕТРА | 2002 |
|
RU2231795C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1840346A2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2002 |
|
RU2218575C2 |
| JP 2005010145 A, 13.01.2005. | |||

