Изобретение относится к измерительной технике и может применяться в навигационно-пилотажных системах летательных аппаратов.
Известен микрогироскоп [1], содержащий корпусную пластину, в которой на упругих подвесах подвешена чувствительная масса. Микрогироскоп содержит чувствительный элемент, состоящий из приводной рамки, чувствительной массы и двух изоляционных обкладок, на которых выполнены проводящие электроды емкостного преобразователя угла и электроды электростатического преобразователя момента. Чувствительная масса развязана по отношению с несущей корпусной пластине и относительно нее может совершать колебательные движения по двум направлениям: x и y, обеспечивая тем самым возможность измерения угловой скорости относительно оси z, перпендикулярной к двум первым.
Недостатками известного чувствительного элемента являются низкая точность измерения.
Известен также микромеханический гироскоп [2], который содержит чувствительный элемент, выполненный в виде сосредоточенной массы, подвешенной с помощью двухрамочной системы упругих подвесов, причем подвесы внешней и внутренней рамок расположены под углом 90° друг к другу, силовой электростатический преобразователь, сообщающий внешней рамке угловые колебательные движения относительно подвесов, емкостной преобразователь перемещений, выявляющий движения внутренней рамки под действием кориолисовых сил, возникающих в результате воздействия на внутреннюю рамку двух движений: радиальных перемещений и измеряемой угловой скорости.
Роль гирочувствительного узла выполняет внутренняя рамка, совмещенная с сосредоточенной массой, а роль мотора выполняет внешняя рамка, приводимая в принудительные колебательные движения электростатическим преобразователем силы. Осью чувствительности является линия, проходящая через подвесы внутренней рамки. При наличии угловой скорости колебательные движения от внешней рамки передаются внутренней. Частота колебаний внутренней рамки совпадает с частотой внешней рамки, а амплитуда является пропорциональной величине угловой скорости. Выявление колебаний внутренней рамки осуществляется емкостным преобразователем перемещений. Для получения оптимальной чувствительности резонансную частоту внутренней рамки настраивают на частоту внешней.
Недостатком известного устройства является влияние перекрестных составляющих угловой скорости и ускорений на точность измерений по оси чувствительности.
Наиболее близким к заявляемому может служить микрогироскоп [3], выполненный на корпусной пластине из проводящего монокремния, микрогироскоп содержит чувствительный элемент, состоящий из маятника со смещенной осью качания и двух изоляционных обкладок, установленных с разных сторон корпусной пластины и соединенных жестко с корпусной пластиной посредством молекулярной сварки, маятник соединен с корпусной пластиной посредством двух диаметрально противоположно расположенных упругих подвесах, на изоляционных обкладках нанесены проводящие электроды для возбуждения колебаний маятнику, проводящие электроды емкостного преобразователя угловых перемещений и проводящие электроды электростатического преобразователя момента, генератор возбуждения принудительных колебаний маятника, корректирующее устройство, электронный контур регулирования ко входам которого подключены проводящие электроды емкостного преобразователя угловых перемещений, выход электронного контура регулирования подключен к проводящим электродам электростатического преобразователя момента
Известный микрогироскоп имеет уходы до 500 град/час от влияний случайных воздействий, соответственно не может использоваться в навигационно-пилотажных системах летательных аппаратов.
Задача, на решение которой направлено изобретение, повышение точности за счет снижение уходов микрогироскопа до 30 град/час. Этот технический результат достигается следующим образом: микрогироскоп, выполненный на корпусной пластине из проводящего монокремния с помощью технологии микроэлектроники, содержащий первый чувствительный подвижный узел, в свою очередь, состоящий из маятника со смещенной осью качания и двух изоляционных обкладок, установленных с разных сторон корпусной пластины и соединенных жестко с корпусной пластиной посредством молекулярной сварки, маятник соединен с корпусной пластиной посредством двух диаметрально противоположно расположенных первым и вторым упругих подвесов, первый электронный контур регулирования, содержащий последовательно включенные первый емкостный преобразователь угловых перемещений, первое корректирующее устройство и первый масштабный усилитель, в соответствии с изобретением одно из плеч первого маятника разделено на две части, первая часть, примыкающая к оси качания, выполнена равной первому плечу, вторая часть, составляющая массу разбаланса маятника, подвешена к маятнику на третьем и четвертом упругих подвесах, ориентированных относительно первого и второго упругих подвесов на 90°, в микрогироскоп введены: второй чувствительный подвижный узел, идентичный первому и расположенный рядом с первым на той же корпусной пластине, второй электронный контур регулирования, содержащий последовательно включенные второй емкостный преобразователь угловых перемещений, второе корректирующее устройство и второй масштабный усилитель, в первом и втором электронных контурах регулирования введены первый и второй знакопеременные линеризаторы по напряжению характеристик первого и второго электростатических преобразователей момента, выходы первого и второго масштабных усилителей подключены ко входам первого и второго знакопеременных линеризаторов по напряжению, выходы первого и второго знакопеременных линеризаторов по напряжению подключены к проводящим электродам первого и второго электростатического преобразователя момента, введен генератор возбуждения принудительных колебаний массы разбаланса маятника первого чувствительного подвижного узла на собственной частоте этой массы с учетом жесткостей третьего и четвертого подвесов, введен вычитатель аналоговых сигналов, к первому входу которого подключен выход первого масштабного усилителя, а ко второму входу - выход второго масштабного усилителя, выход вычитателя аналоговых сигналов является выходом микрогироскопа.
Устройство микрогироскопа представлено на фиг.1, 2 и 3. На фиг.1 приведена конструкция первого подвижного узла микрогироскопа, выполненного посредством микроэлектронной технологии по специально спроектированным фотошаблонам. В конструкцию входят следующие элементы: 1 - корпусная пластина из проводящего монокремния; 2 - сквозное травление в корпусной пластине; 3 - первый подвижный узел (маятник), выполненный из проводящего монокремния за одно целое с корпусной пластиной и являющейся одновременно подвижным электродом емкостного преобразователя перемещений и подвижным электродом силового электростатического преобразователя; 4 - первый (и второй) упругие подвесы, обеспечивающие первому подвижному узлу (маятнику) совершать угловые движения относительно оси x; 5 - третий (и четвертый) упругие подвесы, обеспечивающие массе разбаланса маятника совершать линейные движения вдоль оси y; 6 - первая масса разбаланса маятника.
Второй подвижный узел, идентичный с первым, и изготовлен на общей корпусной пластине как единое целое из проводящего монокремния. Первый и второй подвижные узлы соединены с общей точкой питания «землей». Одновременно первый и второй подвижные узлы являются подвижными электродами емкостных преобразователей перемещений и силовых электростатических преобразователей.
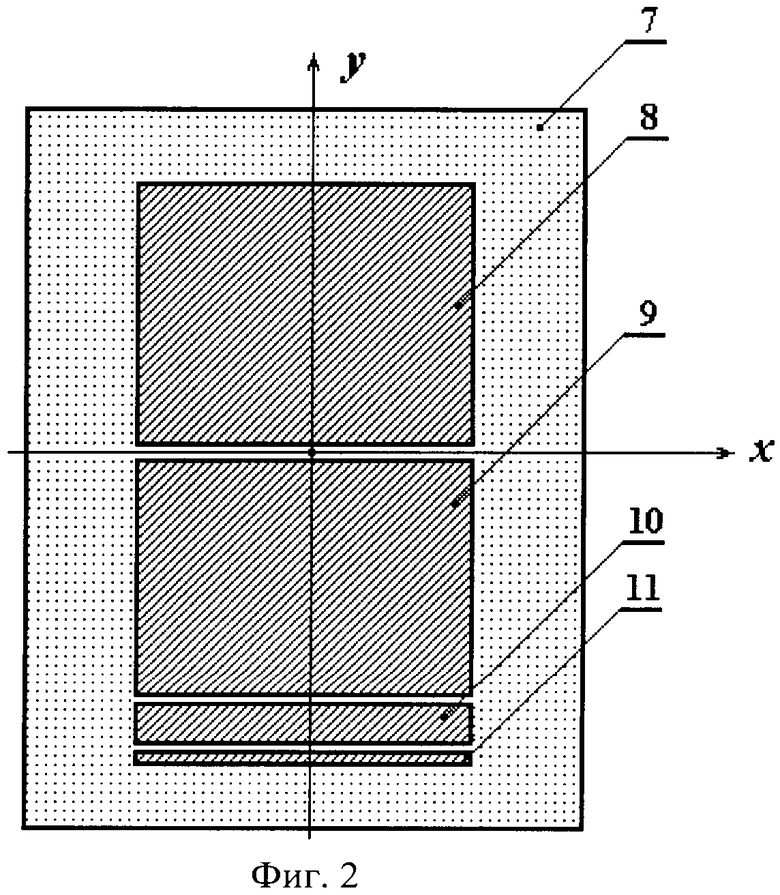
На фиг.2 приведена первая изоляционная обкладка первого подвижного узла. Выполнена изоляционная обкладка может быть, например, из непроводящего монокремния или из ионосодержащего стекла. Обкладка содержит несущую пластину 7, на которой выполнены: два одинаковых проводящих электрода 8 и 9 первого электростатического преобразователя, расположенные симметрично относительно оси х. На несущей пластине 7 имеются также: проводящий электрод 10 первого емкостного преобразователя угловых перемещений и проводящий электрод 11, предназначенный для возбуждения линейных движений маятника вдоль оси y.
Характерной особенностью первого подвижного узла является решение, выливающееся в схему "вибрирующая чувствительная масса разбаланса в маятнике". Маятник первого подвижного узла и первая масса 6 разбаланса маятника имеют по одной степени свободы. Для маятника - угловые колебания, а для массы разбаланса маятника - линейные во взаимно перпендикулярных осях. Пересечение всех осей: измерительной, возбуждающей и оси воздействия угловой скорости в данном решении совмещены в одной точке, а именно на маятнике, который, в свою очередь, механически изолирован от корпусной пластины 1 упругими подвесами 4.
Вторая изоляционная обкладка первого подвижного узла выполнена идентично с первой. Первая и вторая изоляционные обкладки с проводящими электродами размещены симметрично с разных сторон первого подвижного узла и жестко с ним соединены.
Во втором чувствительном подвижном узле второй чувствительной массе разбаланса принудительных колебаний не придают. Второй чувствительный подвижный узел предназначен для корректировки результатов измерения первым чувствительным узлом.
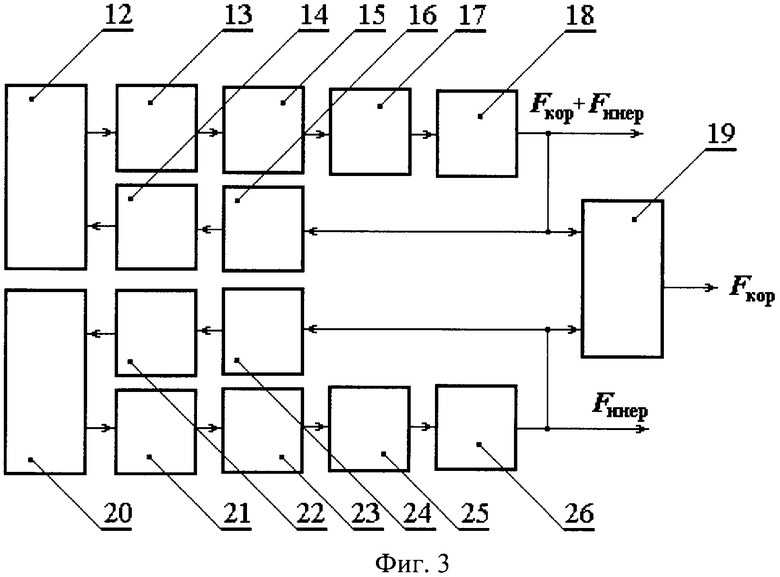
На фиг.3 приведена функциональная схема микрогироскопа. В схему входят следующие блоки: 12(20) - первый и второй чувствительные подвижные узлы; 13(21) - проводящие электроды первого и второго емкостных преобразователей угловых перемещений; 14(22) - проводящие электроды первого и второго электростатических преобразователей; 15(25) - первый и второй емкостные преобразователи угловых перемещений; 16(24) - первый и второй знакопеременные линеризаторы; 17(25) - первое и второе корректирующие устройства; 18(26) - первый и второй масштабные усилители; 19 - вычитатель аналоговых сигналов. Проводящий электрод 11 для возбуждения линейных движений маятника вдоль оси y и генератор возбуждения принудительных колебаний массы разбаланса маятника на фиг.3 не показаны.
Работа микрогироскопа осуществляется следующим образом. При отсутствии измеряемой угловой скорости Ωx, вектор которой направлен по оси x, чувствительная масса 6 совершает линейные колебательные движения относительно оси y, возбуждение которых задается генератором со стабилизированной амплитудой и фазой. Кориолисова ускорения при этом не возникает. Возможно только возникновение некоторой случайной помехи от суммарного действия линейных и угловых ускорений. Такие случайные помехи представляют особо опасный вид погрешности, так называемые уходы микрогироскопа, они проявляются всегда.
При наличии поворотной измеряемой скорости Ωx на чувствительной массе разбаланса 6 возникает знакопеременная кориолисова сила, направленная по оси z и приводящая ее вместе с маятником 3 в колебания относительно оси x. Частота этих колебаний совпадает с частотой вынужденных колебаний массы разбаланса, а амплитуда колебаний является пропорциональной измеряемой угловой скорости Ωx.
Поскольку момент кориолисовой силы является знакопеременным, то он приводит во вторичные колебания чувствительную массу разбаланса вместе с маятником с той же частотой и с осью колебаний, ортогональной двум другим. Других движений в кинематической схеме нет. Мерой, определяющей величину поворотной скорости, является амплитуда колебаний чувствительной массы, на которую ее смещает момент кориолисовой силы. Учтем, что в рассматриваемой кинематической схеме для первого чувствительного элемента имеется две степени свободы, по которым возможны перемещения, а для второго чувствительного элемента всего одна. Электростатический момент в компенсационных устройствах уравновешивает в первом и втором чувствительных элементах соответственно действующие моменты, сводя угловые перемещения чувствительных масс к нулю:
для первого чувствительного элемента - 
для второго чувствительного элемента - 
где Мэл1=2εε0UопU1Fιц/h2 - электростатический момент, уравновешивающий первую чувствительную массу; Мэл2=2εε0UопU2Fιц/h2 - электростатический момент, уравновешивающий вторую чувствительную массу; ε0 - диэлектрическая постоянная; ε - диэлектрическая проницаемость среды между подвижным и неподвижными электродами; Uоп - опорное напряжение; U1 - выходное напряжение первого электронного контура регулирования; U2 - выходное напряжение второго электронного контура регулирования; F - площадь подвижного электрода в плане (площадь чувствительной массы); lц - плечо от оси качания x до центра тяжести чувствительной массы разбаланса; h - зазор между подвижным и неподвижными электродами.
Момент кориолисовой силы относительно оси x определяется следующим выражением:

где m - чувствительна масса разбаланса; νy - знакопеременная скорость чувствительной массы разбаланса вдоль оси y; Ωx - измеряемая угловая скорость относительно оси x; Q - добротность механического узла. Соответственно, чем выше добротность, тем выше амплитуда колебаний и, следовательно, чувствительность механического узла.
Момент кориолисовой силы имеет место только в первом подвижном узле. Во втором подвижном узле его нет, поскольку нет возбуждения принудительных колебаний второй чувствительной массе разбаланса. Для первого и второго чувствительных подвижных узлов все геометрические, механические и электрические характеристики одинаковы, соответственно моменты помех Мпомех1 и Мпомех2 от физических воздействий не подлежащих измерению с точностью изготовления равны. После вычитания выходных сигналов первого и второго электронных контуров регулирования получим значение выходного сигнала, прямо пропорционального измеряемой поворотной скорости относительно оси x:

где 
δ - разность между моментами помех первого и второго электронных контуров регулирования, приводящая к погрешности типа уходов. Эта величина второго порядка малости по сравнению с уходами прототипа. Таким образом, цель изобретения достигнута.
Источники информации
1. Вавилов В.Д. Теоретические основы микросистемных акселерометров и гироскопов. Изд-во НГТУ, 2011, С.204.
2. Северов Л.А. и др. «Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития». Известия ВУЗОВ. Приборостроение. 1998. Т.41. №1-2, стр.57-73.
3. Фрайден Дж. Современные датчики. Справочник. Изд-во ТехноСфера. - М., 2005, стр. 337-339.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| ИНЕРЦИАЛЬНЫЙ ЭЛЕМЕНТ | 2014 |
|
RU2573616C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО ГИРОСКОПА | 2014 |
|
RU2556334C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490754C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
| ИНТЕГРАЛЬНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2010 |
|
RU2431850C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2423712C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2426134C1 |
Изобретение относится к измерительной технике и может применяться в навигационно-пилотажных системах летательных аппаратов. Микрогироскоп выполнен по схеме линейного вибратора на корпусной пластине из проводящего монокремния и содержит два чувствительных элемента, включающих идентичные подвижные узлы, идентичные чувствительные массы и электронные блоки. Первому подвижному узлу придают два движения: угловое движение от действия внешних сил относительно оси чувствительности и линейное колебательное движение по поперечной оси для создания кориолисова ускорения, второму только одно - угловое движение по оси чувствительности от действия внешних сил. Первый чувствительный элемент измеряет кориолисово ускорение и возможные помехи по той же оси, второй чувствительный элемент измеряет только помехи по той же оси. Микрогироскоп содержит также вычитатель аналоговых сигналов, выход которого является выходом микрогироскопа. Изобретение обеспечивает повышение точности за счет снижения уходов микрогироскопа. 3 ил.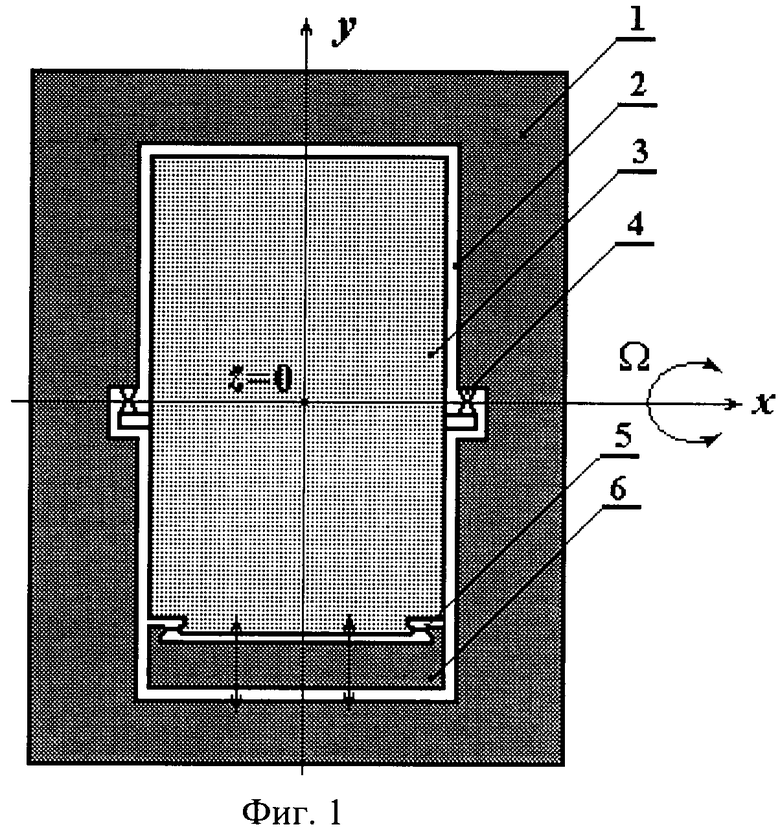
Микрогироскоп, выполненный на корпусной пластине из проводящего монокремния с помощью технологии микроэлектроники, содержащий первый чувствительный подвижный узел, в свою очередь, состоящий из маятника со смещенной осью качания и двух изоляционных обкладок, установленных с разных сторон корпусной пластины и соединенных жестко с корпусной пластиной посредством молекулярной сварки, маятник соединен с корпусной пластиной посредством диаметрально противоположно расположенных первого и второго упругих подвесов, первый электронный контур регулирования, содержащий последовательно включенные первый емкостный преобразователь угловых перемещений, первое корректирующее устройство и первый масштабный усилитель, отличающийся тем, что одно из плеч первого маятника разделено на две части, первая часть, примыкающая к оси качания, выполнена равной первому плечу, вторая часть, составляющая массу разбаланса маятника, подвешена к маятнику на третьем и четвертом упругих подвесах, ориентированных относительно первого и второго упругих подвесов на 90°, в микрогироскоп введены второй чувствительный подвижный узел, идентичный первому и расположенный рядом с первым на той же корпусной пластине, второй электронный контур регулирования, содержащий последовательно включенные второй емкостный преобразователь угловых перемещений, второе корректирующее устройство и второй масштабный усилитель, в первом и втором электронных контурах регулирования введены первый и второй знакопеременные линеаризаторы по напряжению характеристик первого и второго электростатических преобразователей момента, выходы первого и второго масштабных усилителей подключены ко входам первого и второго знакопеременных линеаризаторов по напряжению, выходы первого и второго знакопеременных линеаризаторов по напряжению подключены к проводящим электродам первого и второго электростатических преобразователей момента, введен генератор возбуждения принудительных колебаний массы разбаланса маятника первого чувствительного подвижного узла на собственной частоте этой массы с учетом жесткостей третьего и четвертого подвесов, введен вычитатель аналоговых сигналов, к первому входу которого подключен выход первого масштабного усилителя, а ко второму входу - выход второго масштабного усилителя, выход вычитателя аналоговых сигналов является выходом микрогироскопа.
| ФРАЙДЕН Дж | |||
| Современные датчики | |||
| Справочник | |||
| - М.: Техносфера, 2006, с.337-339 | |||
| СЕВЕРОВ Л.А | |||
| и др | |||
| Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития | |||
| Известия ВУЗОВ | |||
| Приборостроение, 1998, т.41, №1-2, с.57-73 | |||
| ИМПУЛЬСНЫЙ МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2432578C2 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2008 |
|
RU2379694C1 |
| СПОСОБ ВЫЯВЛЕНИЯ НЕКОНТРОЛИРУЕМОГО ПОТРЕБЛЕНИЯ ЭЛЕКТРОЭНЕРГИИ В ЭЛЕКТРИЧЕСКОЙ СЕТИ 0,4 КВ | 2003 |
|
RU2265858C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6595056 B2, 22.07.2003. | |||

