Изобретение относится к области геофизических исследований, а именно к устройствам зондирования гидросферы, и может быть использовано при поиске подводных залежей углеводородов.
Наиболее высокую информативность при проведении гидрологических исследований имеют известные устройства, приведенные в источниках [1-7], дополнительно обеспечивающие измерение объемного рассеяния звука в воде, измерение профилей звука и их градиентов.
Однако при исследованиях, связанных с определением гидрофизических неоднородностей, применение данных устройств ограничивается низким уровнем генерируемых антенной сигналов. Это не является большим препятствием, особенно для малых и средних дистанций зондирования (100-500 м), однако при исследованиях на больших дистанциях возникают значительные трудности. Как правило, в известных устройствах преобразователь накачки представляет собой 28-ми элементную мозаичную антенную решетку, состоящую из пьезокерамических элементов прямоугольной формы, образующих два набора, с различными резонансными частотами. Излучающая поверхность преобразователя накачки имеет форму квадрата со стороной 75 мм. Разностная частота составляет 136 кГц, частоты накачки соответственно 430 кГц и 566 кГц. Разностная частота при этом составляет 50 кГц. Ширина диаграммы направленности антенны находится в пределах 3,5 градуса.
В приемниках давления используются пьезоэлементы, резонансная частота fp которых больше граничной частоты рабочего диапазона.
Для плоской антенной решетки конструктивно оправдано применение плоских элементов, статическая чувствительность которых определяется величиной γcт=gikl, где gik - пьезоконстанта, ik=33 для поперечного пьезоэффекта и ik=31 для продольного пьезоэффекта, l - расстояние между электродами.
Так как расстояние между электродами нельзя бесконечно увеличивать, то чувствительность таких элементов в данной антенне недостаточна, что не позволяет максимально использовать всю площадь приема.
Известно также устройство [8], представляющее собой глубоководный зонд, в котором излучаемые акустические сигналы формируются параметрическим излучателем звука, который аппаратно разделен на две части (бортовой блок и погружаемый блок). Комплекс глубоководного зонда включает в себя собственно глубоководное устройство, размещенное в двух прочных цилиндрах диаметром 150 мм, длиной около 1 м, с вынесенной глубоководной параметрической антенной, приемником звука и датчиком скорости звука, и бортовую аппаратуру, с помощью которой производится включение глубоководного устройства и изменение режимов его работы.
Глубоководная часть зонда соединяется с бортовой аппаратурой посредством кабеля КСБ-8 длиной 2000 м, намотанного на лебедку, имеющего семь токоведущих жил в резиновой изоляции и несущую стальную оплетку двойного повива.
Акустические сигналы, излучаемые зондом, формируются параметрическим излучателем звука, бортовой блок формирователя которого задает режим работы параметрической антенны и осуществляет синхронизацию работы всего зонда.
Антенна накачки излучает в водную среду две акустические волны накачки с различными частотами, которые взаимодействуют между собой в процессе распространения. В результате взаимодействия в среде образуется волна с частотой, равной разности частот накачки, которая является и рабочей частотой устройства. Таким образом, в среде формируется антенна волны разностной частоты. Антенна накачки представляет собой два набора пьезокерамических преобразователей, каждый из которых подключен к своему усилителю мощности. Наборы преобразователей расположены в шахматном порядке и залиты полимерным компаундом типа КТ-65.
Излучающий тракт зонда имеет диапазон рабочих (разностных) частот 5-30 кГц (четыре дискретные частоты), частота волн накачки (средняя) 150 кГц, длительность зондирующих импульсов 0,2; 1,5 мс. При длительности 0,2 мс предусмотрено отключение одного из генераторов накачки, при этом излучается только волна накачки с частотой 150±15 кГц, ширина диаграммы направленности по уровню 0,7 от максимального уровня составляет 2,5 градуса во всем диапазоне рабочих частот, диаметр антенны накачки 210 мм. В системе передачи команд применена кодово-импульсная модуляция с частотным разделением сигналов команд и синхроимпульсов.
Недостатком данного устройства является то, что оно не является автономным средством измерения, так как часть аппаратуры размещена на борту судна. Связь и передача команд управления осуществляется по кабелю, что существенно ограничивает радиус действия данного устройства. Кроме того, в известном устройстве не в полной мере обеспечивается однородность акустического поля, так как резонансная частота меньше граничной частоты рабочего диапазона.
Общим недостатком известных устройств является то, что они требуют кабельной связи с диспетчерской станций, в роли которой как правило используются гидрографические суда, что существенно сужает область исследований. Кроме того, при использовании известных устройств, снабженных кабельной линией, весьма трудоемким является решение задачи по обеспечению их стабилизации, особенно в районах с сильными подводными течениями.
Наиболее близкими к заявленному решению являются устройства [9, 10], каждое из которых представляет собой подводный зонд, содержащий контейнер с информационно-измерительной аппаратурой, состоящей из параметрической антенны, приемника звука с приемной антенной и датчика определения скорости звука, программно-управляющей аппаратуры, блока электропитания и устройства для регулирования плавучести с исполнительным механизмом, размещенным в нижней части контейнера и состоящим из двух частей, нижняя из которых включает в себя внутреннюю секцию, выполненную из гибкого материала, при этом стенки внешней секции перфорированы для сообщения с окружающей водной средой, а верхняя часть заполнена балластоотжимающей магнитной жидкостью и сообщена с нижней частью трубкой с управляемым вентилем, а механизм выполнен в виде асинхронного электродвигателя, внутри статора которого по спирали уложена трубка, информационно-измерительная аппаратура, содержащая датчики гидроакустических сигналов, включающие параметрическую антенну, приемник звука с приемной антенной, датчик скорости звука, в котором контейнер помещен в оболочку, выполненную в виде решетчатой конструкции, элементы конструкции которой расположены под разными углами в вертикальной и горизонтальной плоскостях и на них размещены приемные устройства датчиков информационно-измерительной аппаратуры, приемная антенна приемника звука выполнена в форме цилиндра с тангенциальной поляризацией, а внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов, дополнительно введены электрическая микромашина с гребным винтом в одном корпусе с ротором, вал которой снабжен постоянным магнитом и размещенная на поворотном устройстве, установленном на оболочке контейнера, электрическая микромашина с постоянными магнитами на роторе, размещенная в нижней части контейнера, навигационный модуль, импульсный датчик оборотов, измеритель глубины, канал спутниковой связи.
Однако состав измерительных средств, используемых в известных подводных зондах, позволяет регистрировать акустические сигналы преимущественно в гидросфере, кроме того, наличие камеры с балластоотжимающей жидкостью существенно усложняет их конструкции.
Задачей настоящего предложения является расширение функциональных возможностей устройств, предназначенных для гидрофизических исследований, включая поиск подводных залежей углеводородов, а также снижение трудоемкости при изготовлении зонда.
Поставленная задача решается за счет того, что в подводном зонде, выполненном в виде контейнера, внутри которого размещены программно-управляющая аппаратура, информационно-измерительная аппаратура, электрическая микромашина с гребным винтом в одном корпусе с ротором, вал которой снабжен постоянным магнитом, электрическая микромашина с постоянными магнитами на роторе, навигационный модуль, контейнер выполнен многосекционным, секции контейнера соединяются между собой посредством резьбового соединения, кроме того, дополнительно введены сейсмический модуль, магнитотеллурический измерительный модуль, пенетрометр, спектроанализатор, датчик регистрации метана, блок гидрохимических измерений, блок оптических измерений, блок регистрации радиоактивных излучений, информационно соединенные с программно-управляющей аппаратурой, горизонтальные и вертикальные туннельные движители, информационно соединенные с программно-управляющей аппаратурой.
Новые отличительные признаки заявляемого технического решения, заключающиеся в том, что контейнер выполнен многосекционным, секции контейнера соединяются между собой посредством резьбового соединения, кроме того, дополнительно введены сейсмический модуль, магнитотеллурический измерительный модуль, пенетрометр, спектроанализатор, датчик регистрации метана, блок гидрохимических измерений, блок оптических измерений, блок регистрации радиоактивных излучений, информационно соединенные с программно-управляющей аппаратурой, горизонтальные и вертикальные туннельные движители, информационно соединенные с программно-управляющей аппаратурой, обеспечивают достижение технического результата, заключающегося в расширении функциональных возможностей устройства, а также в снижении трудоемкости при его изготовлении.
Сущность изобретения поясняется чертежами.
Фиг.1. Общий вид подводного зонда, где позициями обозначены: 1 - движительный модуль, 2 - сейсмический модуль, 3 - навигационный модуль, 4 - блок программно-управляющей аппаратуры, 5 - модуль информационно-измерительной аппаратуры, 6 - магнитотеллурический измерительный модуль, резьбовое соединение 7. Модуль информационно-измерительной аппаратуры 5 снабжен аппарелью 8. Модули 1, 2, 3, 5 и 6 соединяются между собой посредством резьбового соединения 7.
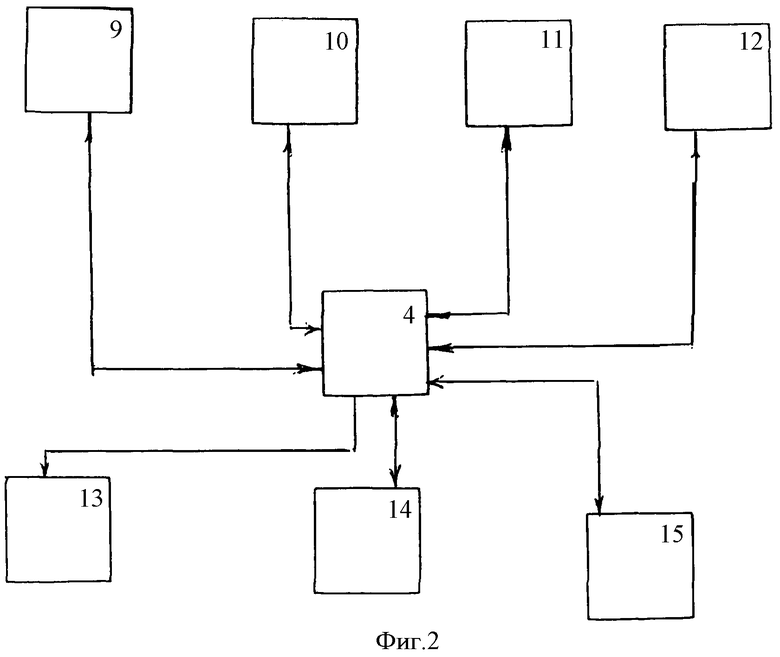
Фиг.2. Блок-схема модуль информационно-измерительной аппаратуры 5, где позициями обозначены: пенетрометр 9, спектроанализатор 10, датчик регистрации метана 11, блок гидрохимических измерений 12, блок оптических измерений 13, блок регистрации радиоактивного излучения 14, блок датчиков регистрации 15 гидростатического давления, солености, электропроводности, температуры, информационно соединенные с блоком управления 4.
Движительный модуль 1 включает электрическую микромашину с гребным винтом в одном корпусе с ротором, горизонтальные и вертикальные туннельные движители, электрическую микромашину с постоянными магнитами на роторе.
Конструкция и принцип действия электрической микромашины с гребным винтом в одном корпусе с ротором описаны в [9, 10].
Конструкция и принцип действия электрической микромашины с постоянными магнитами на роторе описаны в [9, 10]. Данная электромашина функционирует в двух режимах: в режиме генератора и в режиме двигателя. При работе в режиме генератора она обеспечивает питанием все остальную аппаратуру.
Горизонтальные и вертикальные туннельные движители предназначены для управляемости подводного зонда при неподвижном состоянии и при нулевой скорости движения.
Сейсмический модуль 2 представляет собой многоканальный сейсмометрический комплекс, состоящий из высокочувствительных датчиков типа СМ-3КВ ADNR, регистрирующего широкополосного модуля с блоком фильтров и усилителей, аналого-цифровыми и цифроаналоговыми преобразователями, микропроцессором, соединенным с блоком программно-управляющей аппаратуры 4.
Навигационный модуль 3, предназначенный для решения задач навигации и позиционирования подводного зонда, включает доплеровский измеритель скорости, инерциальный модуль измерения курса, угловых и линейных перемещений, приемоиндикатор спутниковой навигационной системы, многолучевой эхолот типа R2SS2022, батиметрический гидролокатор типа «Benthos C3D», профилограф с глубиной проникновения под поверхность дна до 200 м.
Блок программно-управляющей аппаратуры 4 состоит из ПЗУ микрокоманд, ПЗУ управления выбором адреса, БИС микропрограммного управления, двух микропроцессоров, ПЗУ, ОЗУ, схемы формирования переносов, буферных регистров, пяти магистралей - магистрали адреса, магистрали микрокоманд, магистрали D, магистрали М, магистрали L аналого-цифровых преобразователей, модемов акустического канала связи и канала подводной радиосвязи типа «Sea Tooth».
Магнитотеллурический измерительный модуль 6 включает трехкомпонентный магнитометр для глубоководных исследований, аналогами которого являются магнитометры типа S-100 (ф. Narod Geophysics, Канада), типа SFSM (США) или типа МКМ-01 (Россия), построенный на цезиевых датчиках, не требующих пространственной ориентации, и гравиметр, аналогом которого является гравиметр типа BGM-3, обеспечивающий выполнение точных измерений при больших помехах.
Посредством магнитотеллурического измерительного модуля 6 выполняют синхронные измерения электрических и магнитных компонент магнитотеллурического поля на частотах 0,001-10 Гц в разных точках зоны исследований.
Пенетрометр 9 представляет собой зонд, установленный на телескопическом устройстве, и предназначен для измерения прочностных характеристик грунта во время нахождения подводного зонда на морском дне во время нахождения подводного зонда на морском дне.
Аналогом пенетрометра 9 является пенетрометр типа «ТМ-153 Technomarc S.P.A.» с глубиной проникновения в грунт до 200 м. Постановка пенетрометра 9 в рабочее положение осуществляется посредством телескопического устройства, которое приводится в действие при открывании аппарели 8.
По результатам морской грунтовой съемки, на основании моделирования определяется пространственно-временное распределение средней по глубине концентрации взвеси и толщины слоя осадков на морском дне, а также гранулометрический состав грунта.
Блок гидрохимических измерений 12 представляет собой устройство, которое предназначено для классификации загрязнений морской воды по спектральным характеристикам и молекулярному составу морской воды (см., например, [11-14]).
Спектроанализатор 10 предназначен для измерения спектров комбинационного рассеяния оптического излучения. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора 10: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Блок регистрации радиоактивного излучения 14 предназначен для определения in situ содержания гамма-излучающих радионуклидов (как техногенного, так и естественного происхождения) в морской воде.
Основные технические характеристики блока 14: диапазон регистрируемых энергий 0,2-3,0 мэВ, энергетическое разрешение по линии цезия 137 13%, число уровней квантования спектра 256, максимальное число отсчетов в канале 65000, максимальная скорость регистрации не менее 1000 1/с.
В качестве датчика регистрации метана 11 использован датчик типа METS ("CAPSUM"), который позволяет измерять концентрацию метана в водной толще. Датчик представляет собой полупроводниковый прибор, принцип работы которого заключается в том, что диффузия молекул углеводородов из воды через специальную силиконовую мембрану транслируется в камеру датчика. Адсорбция молекул углеводов на активном слое датчика приводит к электронному обмену с молекулами кислорода, таким образом, меняется сопротивление активного слоя, которое преобразуется в выходное (измеряемое) напряжение.
Основные характеристики датчика:
- 10 мкм силиконовая мембрана,
- рабочая глубина 0-3500 м,
- рабочая температура 2-20 градусов С,
- время измерения от 1 до 3 сек,
- время стабилизации диффузии до 5 минут, в зависимости от турбулентности,
- входное напряжение 9-36 В,
- расход энергии 160 мА/ч,
- выходной сигнал 0-5 В - аналоговый, RS - 485 - цифровой,
- метан 50 нмоль/л - 10 мкмоль/л.
Блок датчиков регистрации 15 гидростатического давления, солености, электропроводности, температуры включает стандартные серийно выпускаемые датчики, предназначенные для регистрации соответствующих параметров гидросферы. Работа заявляемого устройства заключается в следующем.
Перед постановкой подводного зонда в зависимости от назначения исследовательских работ формируется состав модулей, что обеспечивается благодаря конструкции подводного зонда в виде отдельных секций.
После постановки подводного зонда на водную поверхность по каналам связи подается команда на блок программно-управляющей аппаратуры 4 для запуска движительного модуля 1, навигационного модуля 3, модуля информационно-измерительной аппаратуры 5 и магнитотеллурического модуля 6. При достижении установленного горизонта или при достижении зондом грунта подается команда на включение сейсмического модуля 2. Все измеряемые параметры регистрируются синхронно, полученная информация передается в установленные сеансы связи на пункт обработки и анализа.
Дополнительно введенные в устройство измерительные датчики позволяют получить избыточную информацию для последующего анализа при поиске подводных залежей углеводородов.
Источники информации
1. СА 1310101, 10.11.1992.
2. US 5136549, 04.08.1992.
3. US 5128907, 07.07.1992.
4. NO 923428, 06.10.1992.
5. NO 924654. 06.06.1994.
6. NO 864300, 04.05.1987.
7. NO 911639, 26.10.1992.
8. В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. Гидроакустические параметрические системы. - Ростов-на-Дону: РостИздат, 2004, с.293-302.
9. RU 2365940, 27.08.2009.
10. RU 2370787, 20.10.2009.
11. Основные процессы и аппараты химической технологии: Пособие по проектированию / Под ред. Дытнерского Ю.Н. - М.: Химия, 1983.
12. Химико-аналитические комплексы фирмы Agilent Technologies (US), http://www.chem.agilent.com.
13. Химико-аналитические комплексы фирмы SR1 Instruments (US), http://www.perichrom.com.
14. Химико-аналитические комплексы ЗАО "Хроматэк" (RU), http://www.chromatec.ru.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ГЕОРАЗВЕДКИ | 2010 |
|
RU2436132C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
Изобретение относится к устройствам для зондирования гидросферы и может быть использовано при поиске подводных залежей углеводородов. Сущность: зонд выполнен в виде многосекционного контейнера. Секции контейнера соединены между собой посредством резьбового соединения (7). Внутри секций размещены программно-управляющая аппаратура (4), информационно-измерительная аппаратура (5), сейсмический модуль (2), магнитотеллурический измерительный модуль (6), навигационный модуль (3). Контейнер оснащен двумя электрическими микромашинами, горизонтальными и вертикальными туннельными движителями, образующими движительный модуль (1). Информационно-измерительная аппаратура (5) включает пенетрометр, спектроанализатор, датчик регистрации метана, блок гидрохимических измерений, блок оптических измерений, блок регистрации радиоактивных излучений, информационно соединенные с программно-управляющей аппаратурой. Технический результат: расширение функциональных возможностей устройства, снижение трудоемкости при его изготовлении. 2 ил.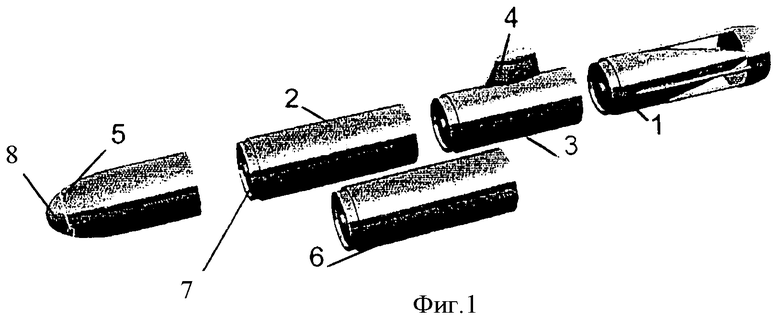
Подводный зонд, выполненный в виде контейнера, внутри которого размещены программно-управляющая аппаратура, информационно-измерительная аппаратура, в который дополнительно введены электрическая микромашина с гребным винтом в одном корпусе с ротором, вал которой снабжен постоянным магнитом, электрическая микромашина с постоянными магнитами на роторе, навигационный модуль, отличающийся тем, что контейнер выполнен многосекционным, секции соединяются между собой посредством резьбового соединения, дополнительно введены сейсмический модуль, магнитотеллурический измерительный модуль, пенетрометр, спектроанализатор, датчик регистрации метана, блок гидрохимических измерений, блок оптических измерений, блок регистрации радиоактивных излучений, информационно соединенные с программно-управляющей аппаратурой, горизонтальные и вертикальные туннельные движители, информационно соединенные с программно-управляющей аппаратурой.
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| Всплывающий зонд для измерения гидрофизических параметров воды | 1980 |
|
SU959010A1 |
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| CN 101323363 A, 17.12.2008. | |||

