Изобретение относится к области приборостроения, а именно к измерителям векторов линейного ускорения или угловой скорости.
Известен блок преобразователей механической величины в виде линейного ускорения или угловой скорости [1], содержащий шесть акселерометров, измерительная ось каждого из которых направлена по нормали к одной из граней куба.
Наиболее близким по технической сущности является блок преобразователей механической величины в виде линейного ускорения или угловой скорости [2], содержащий установленные в имеющем вид многогранника основании шесть однородных преобразователей механической величины, например акселерометров или датчиков угловой скорости, причем на каждой из шести граней многогранника, предназначенных для установки преобразователей механической величины, установлен один преобразователь механической величины с направлением измерительной оси относительно нормали к этой грани.
Недостатком такого блока преобразователей механической величины в виде линейного ускорения или угловой скорости является несоответствие его требованиям параметрического резервирования для измерения линейного ускорения или угловой скорости.
Техническим результатом изобретения является повышение надежности блока преобразователей механической величины в виде линейного ускорения или угловой скорости.
Данный технический результат достигается в блоке преобразователей механической величины в виде линейного ускорения или угловой скорости, содержащем установленные в имеющем вид многогранника основании шесть однородных преобразователей механической величины, например акселерометров или датчиков угловой скорости, причем на каждой из шести граней многогранника, предназначенных для установки преобразователей механической величины, установлен один преобразователь механической величины с направлением измерительной оси относительно нормали к этой грани, тем, что каждый преобразователь механической величины установлен на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу.
Путем установки каждого преобразователя механической величины на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу, обеспечивается ориентация измерительной оси относительно вектора измеряемого линейного ускорения или угловой скорости каждого из преобразователей механической величины, отличная от ориентации остальных преобразователей механической величины. В результате достигается параметрическое резервирование блока преобразователей механической величины в виде линейного ускорения или угловой скорости, так как обеспечивается исключение из результатов измерения составляющих вектора линейного ускорения или угловой скорости показаний акселерометра или датчика угловой скорости, имеющего отклонение значения измеренной механической величины от значения, полученного при калибровке преобразователя механической величины. Тем самым повышается надежность блока преобразователей механической величины в виде линейного ускорения или угловой скорости.
На чертеже представлен вид блока преобразователей механической величины в виде линейного ускорения или угловой скорости.
Блок преобразователей механической величины в виде линейного ускорения или угловой скорости (см. чертеж) содержит основание 1, грани которого сориентированы относительно граней додекаэдра. Нормаль 2 ориентирована относительно грани АБВГД и параллельной ей парной грани ЕЖЗИК. К грани ЛМНБВ и параллельной ей парной грани ОПРИК установлена нормаль 3. Нормаль 4 выставлена к грани СОПДГ и параллельной ей парной грани ТЗЖМН. Относительно грани ВГСУЛ и параллельной ей парной грани ЗТФРИ выставлена нормаль 5. К грани ЕЖМЛУ и параллельной ей парной грани АДПРФ установлена нормаль 6. Нормаль 7 выставлена к грани ЕКОСУ и параллельной ей парной грани АБНТФ. Так как у додекаэдра двенадцать граней, то на гранях шести пар граней, в которых противоположные грани параллельны, шесть преобразователей механической величины, например шесть акселерометров или шесть датчиков угловой скорости, можно установить разными способами. Например, в одном варианте первый преобразователь механической величины может быть установлен на грани АБВГД (ей параллельна грань ЕЖЗИК) основания 1 с направлением его измерительной оси по нормали 2, второй преобразователь механической величины на грани ЛМНБВ (ей параллельна грань ОПРИК) с направлением измерительной оси по нормали 3, третий преобразователь механической величины на грани СОПДГ с направлением измерительной оси по нормали 4, четвертый преобразователь механической величины на грани ВГСУЛ с направлением измерительной оси по нормали 5, пятый преобразователь механической величины на грани ЕЖМЛУ с направлением измерительной оси по нормали 6, шестой преобразователь механической величины на грани ЕКОСУ с направлением измерительной оси по нормали 7. В этом случае основание 1 будет иметь вид, представленный на чертеже. В другом варианте первый преобразователь механической величины может быть установлен на грани АБВГД основания 1 с направлением его измерительной оси по нормали 2, второй преобразователь механической величины на грани ЛМНБВ с направлением измерительной оси по нормали 3, третий преобразователь механической величины на грани СОПДГ с направлением измерительной оси по нормали 4, четвертый преобразователь механической величины на грани ВГСУЛ с направлением измерительной оси по нормали 5, пятый преобразователь механической величины на грани АДПРФ (ей параллельна грань ЕЖМЛУ) с направлением измерительной оси противоположно нормали 6, шестой преобразователь механической величины на грани АБТНФ (ей параллельна грань ЕКОСУ) с направлением измерительной оси противоположно нормали 7. Тогда основание 1 может быть выполнено в виде верхней части додекаэдра.
Ближайшие друг к другу нормали из нормалей 2-7 находятся на угловом расстоянии α=63,434949…°.
Основание 1 имеет посадочные отверстия и установочные площадки для монтажа преобразователей механической величины. Основание 1 может иметь любую форму, но при этом на нем должны быть выполнены необходимые для установки преобразователей механической величины плоскости, направление нормалей к которым соответствует направлениям нормалей 2-7 (в таком же направлении или в противоположном). Конструкции основания 1, акселерометров и датчиков угловой скорости не приведены в описании изобретения, так как они не играют роли в раскрытии сути изобретения.
Блок преобразователей механической величины в виде линейного ускорения или угловой скорости работает следующим образом. Если, например, на основании 1 установлены акселерометры, то при наличии линейного ускорения каждый из акселерометров преобразует линейное ускорение в выходной сигнал, пропорциональный проекции вектора линейного ускорения на измерительную ось акселерометра. Вследствие того, что измерительные оси шести акселерометров направлены соответственно по нормалям 2-7, угловые расстояния между которыми не кратны 90°, то измерительная ось каждого из акселерометров образует свое угловое положение относительно вектора линейного ускорения, отличное от угловых положений относительно вектора линейного ускорения измерительных осей других акселерометров. Так как для измерения вектора линейного ускорения достаточно результатов измерения трех акселерометров (триады акселерометров), измерительные оси которых не коллинеарны, то образуется сочетание двадцати триад акселерометров, измеряющих вектор линейного ускорения. Если показания каждого акселерометра адекватны проекции вектора линейного ускорения на его измерительную ось, то результат измерения вектора линейного ускорения всех двадцати триад идентичен.
При возникновении погрешности измерения вектора линейного ускорения, превышающей допустимую у одного из акселерометров блока преобразователей механической величины в виде линейного ускорения или угловой скорости, обнаруживается несколько триад акселерометров, результаты измерения вектора линейного ускорения которых не идентичны с результатами измерения остальных триад. По тому, какой из акселерометров входит в эти триады, отличающиеся по результатам измерения вектора линейного ускорения, происходит отбраковка показаний акселерометра с погрешностью измерения линейного ускорения.
Так как после отбраковки одного из акселерометров в блоке преобразователей механической величины в виде линейного ускорения или угловой скорости остается комбинация триад из пяти акселерометров, то обеспечивается отбраковка еще одного акселерометра. Таким образом происходит исключение из результатов измерения вектора линейного ускорения двух отказавших акселерометров.
Подобным же образом при установке на основании 1 шести датчиков угловой скорости с направлением их измерительных осей по нормалям 2-7 образуется двадцать триад датчиков угловой скорости для измерения вектора угловой скорости, и происходит исключение из результатов измерения вектора угловой скорости двух датчиков угловой скорости.
Тем самым достигается большая степень параметрического резервирования блока преобразователей механической величины в виде линейного ускорения или угловой скорости.
В результате повышается надежность блока преобразователей механической величины в виде линейного ускорения или угловой скорости.
Источники информации
1. А.М.Боронахин, Е.Д.Бохман, А.О.Грунский, Д.П.Лукьянов, Н.С.Филипеня. «Инерциальный измерительный модуль на микромеханических чувствительных элементах». Навигация и управление движением: Материалы докладов VIII конференции молодых ученых. «Навигация и управление движением» - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2007, стр.118-124.
2. В.Н.Бранец, Д.Н.Дибров, В.С.Рыжков, Л.Я.Калихман, Д.М.Калихман, А.В.Полушкин, С.Ф.Нахов. Измеритель вектора кажущегося линейного ускорения - прибор БИЛУ КХ69-042 для СУ спускаемого аппарата корабля «Союз-ТМА». XIII Санкт-Петербургская международная конференция по интегральным навигационным системам. Сборник материалов - СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2006, стр.253-263.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ БЛОК | 2018 |
|
RU2690004C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
| БЛОК ПРЕОБРАЗОВАТЕЛЕЙ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2458321C1 |
| Способ измерения пространственной вибрации точки тела и устройство для его осуществления | 1991 |
|
SU1826068A1 |
| Способ изготовления и конструкция инерциального измерительного модуля | 2019 |
|
RU2726286C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
Изобретение относится к области измерительной техники и приборостроения, а именно к приборам для измерения векторов линейного ускорения или угловой скорости. Технический результат - повышение надежности блока преобразователей механической величины в виде линейного ускорения или угловой скорости. Для достижения данной цели блок преобразователей механической величины в виде линейного ускорения или угловой скорости содержит установленные в основании многогранника шесть однородных преобразователей механической величины, например акселерометров или датчиков угловой скорости. Причем на каждой из шести граней многогранника, предназначенных для установки преобразователей механической величины, установлен один преобразователь механической величины с направлением измерительной оси относительно нормали к этой грани. В соответствии с изобретением, каждый преобразователь механической величины установлен на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу. 1 ил.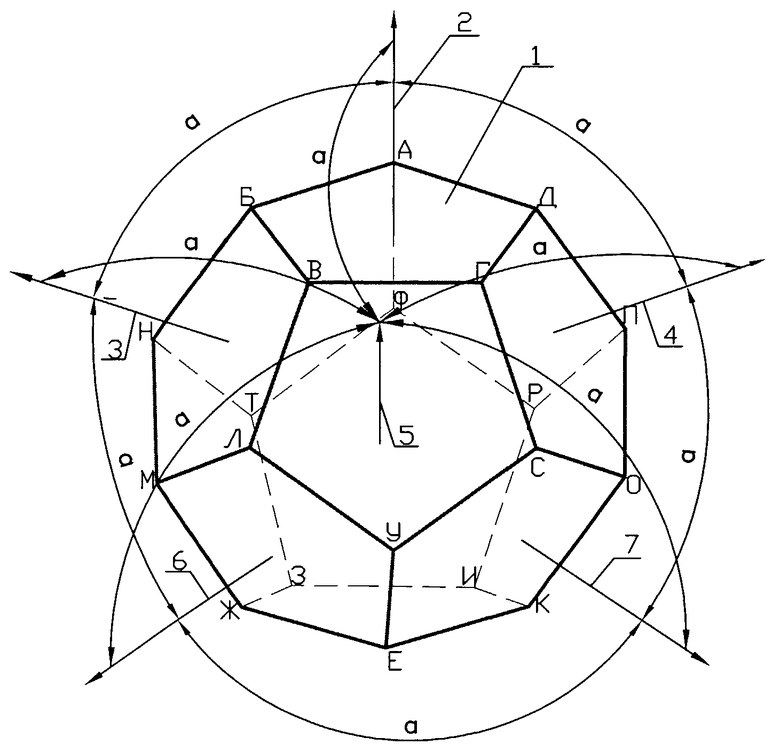
Блок преобразователей механической величины в виде линейного ускорения или угловой скорости, содержащий установленные в имеющем вид многогранника основании шесть однородных преобразователей механической величины, например акселерометров или датчиков угловой скорости, причем на каждой из шести граней многогранника, предназначенных для установки преобразователей механической величины, установлен один преобразователь механической величины с направлением измерительной оси относительно нормали к этой грани, отличающийся тем, что каждый преобразователь механической величины установлен на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу.
| БРАНЕЦ В.Н., ДИБРОВ Д.Н., РЫЖКОВ В.С., КАЛИХМАН Л.Я., КАЛИХМАН Д.М., ПОЛУШКИН А.В., НАХОВ С.Ф | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| XIII Санкт-Петербургская международная конференция по интегральным навигационным системам | |||
| Сборник материалов | |||
| - СПб.: ГНЦ РФ | |||

