Изобретение относится к области приборостроения, а именно к бесплатформенным инерциальным навигационным системам.
Существует блок преобразователей инерциальной информации [1], содержащий основание, на котором установлены три акселерометра и три датчика угловой скорости.
Известен блок преобразователей инерциальной информации [2], содержащий основание, на котором установлены три акселерометра и три лазерных гироскопа.
Наиболее близким по технической сущности является блок преобразователей инерциальной информации [3], содержащий основание с установленными на нем первой группой из трех акселерометров и первым оптическим блоком с тремя лазерными гироскопами, систему возбуждения угловых колебаний оптического блока относительно первой из трех взаимно перпендикулярных осей приборной системы координат блока преобразователей инерциальной информации.
Недостатком такого блока преобразователей инерциальной информации является не совсем удовлетворительная надежность вследствие отсутствия резервирования преобразователей инерциальной информации.
Техническим результатом изобретения является повышение надежности и точности блока преобразователей инерциальной информации.
Данный технический результат достигается в блоке преобразователей инерциальной информации, содержащем основание с установленными на нем первой группой из трех акселерометров и первым оптическим блоком с тремя лазерными гироскопами, систему возбуждения угловых колебаний оптического блока относительно первой из трех взаимно перпендикулярных осей приборной системы координат блока преобразователей инерциальной информации, тем, что в него введены второй оптический блок с тремя лазерными гироскопами, установленная на основании вторая группа из трех акселерометров, измерительная ось каждого из акселерометров первой группы акселерометров расположена на угловом расстоянии 37,377…° относительно первой оси приборной системы координат, измерительная ось каждого из акселерометров второй группы акселерометров расположена на угловом расстоянии 79,187…° относительно первой оси, акселерометры первой и второй групп установлены на основании так, что проекции на перпендикулярную первой оси плоскость измерительных осей первой группы акселерометров чередуются с проекциями на вышеуказанную плоскость измерительных осей второй группы акселерометров с угловыми расстояниями между ними в 60°; измерительная ось каждого из лазерных гироскопов первого оптического блока расположена на угловом расстоянии 54,7356° относительно первой оси приборной системы координат, измерительная ось каждого из лазерных гироскопов второго оптического блока расположена на угловом расстоянии 125,2644° относительно первой оси, лазерные гироскопы в первом и втором оптических блоках выполнены так, что проекции на перпендикулярную первой оси плоскость измерительных осей первого оптического блока чередуются с проекциями на вышеуказанную плоскость измерительных осей второго оптического блока с угловыми расстояниями между ними в 60°; система возбуждения угловых колебаний выполнена так, что угловые колебания второго оптического блока противофазны угловым колебаниям первого оптического блока.
В одном частном случае в блоке преобразователей инерциальной информации акселерометры первой и второй групп установлены на основании так, что проекция на плоскость, перпендикулярную первой оси приборной системы координат блока преобразователей инерциальной информации, измерительной оси одного из акселерометров первой или второй групп совмещена с одной из осей приборной системы координат, лежащей в вышеуказанной плоскости.
В другом частном случае в блоке преобразователей инерциальной информации первый и второй оптические блоки установлены на основании так, что проекция на плоскость, перпендикулярную первой оси приборной системы координат блока преобразователей инерциальной информации, измерительной оси одного из лазерных гироскопов первого или второго оптических блоков совмещена с одной из осей приборной системы координат, лежащей в вышеуказанной плоскости.
Путем введения второй группы из трех акселерометров, установления измерительной оси каждого из акселерометров первой группы акселерометров на угловом расстоянии 37,377…° относительно первой оси приборной системы координат, расположения измерительной оси каждого из акселерометров второй группы акселерометров на угловом расстоянии 79,187…° относительно первой оси, установки акселерометров первой и второй групп на основании так, что проекции на перпендикулярную первой оси плоскость измерительных осей первой группы акселерометров чередуются с проекциями на вышеуказанную плоскость измерительных осей второй группы акселерометров с угловыми расстояниями между ними в 60°, обеспечивается параметрическое резервирование канала измерения вектора линейного ускорения в блоке преобразователей инерциальной информации, что повышает надежность блока преобразователей инерциальной информации.
Посредством введения второго оптического блока, установки измерительной оси каждого из лазерных гироскопов первого оптического блока на угловом расстоянии 54,7356° относительно первой оси приборной системы координат, измерительной оси каждого из лазерных гироскопов второго оптического блока на угловом расстоянии 125,2644° относительно первой оси, выполнения лазерных гироскопов первого и второго оптических блоков так, что проекции на перпендикулярную первой оси плоскость измерительных осей первого оптического блока чередуются с проекциями на вышеуказанную плоскость измерительных осей второго оптического блока с угловыми расстояниями между ними в 60°, обеспечивается резервирование канала измерения вектора угловой скорости в блоке преобразователей инерциальной информации, что повышает надежность блока преобразователей инерциальной информации.
При выполнении системы возбуждения угловых колебаний так, что угловые колебания второго оптического блока противофазны угловым колебаниям первого оптического блока, обеспечивается повышение точности блока преобразователей инерциальной информации вследствие повышения точности измерения вектора угловой скорости за счет минимизации угловых колебаний первого и второго оптических блоков относительно осей, перпендикулярных первой оси из трех взаимно перпендикулярных осей приборной системы координат блока преобразователей инерциальной информации.
При выполнении системы возбуждения угловых колебаний так, что угловые колебания второго оптического блока противофазны угловым колебаниям первого оптического блока, обеспечивается повышение точности блока преобразователей инерциальной информации вследствие повышения точности измерения вектора линейного ускорения за счет минимизации вибрационных воздействий, передаваемых на основание с акселерометрами от системы возбуждения угловых колебаний оптических блоков.
На фиг.1 представлен общий вид блока преобразователей инерциальной информации, на фиг.2 - вид блока преобразователей инерциальной информации в разрезе по А-А, на фиг.3 - вид элемента системы возбуждения угловых колебаний оптических блоков, на фиг.4 - вертикальная проекция оптического блока, на фиг.5 - горизонтальная проекция оптического блока, на фиг.6 - вид оптического блока в разрезе по В-В, на фиг.7 - вид оптического блока в разрезе по Г-Г, на фиг.8 - вид оптического блока в разрезе по Д-Д, на фиг.9 - расположение измерительных осей акселерометров относительно первой оси приборной системы координат блока преобразователей инерциальной информации, на фиг.10 - расположение проекций измерительных осей акселерометров на плоскости, перпендикулярной первой оси приборной системы координат, на фиг.11 - расположение измерительных осей лазерных гироскопов первого и второго оптических блоков относительно первой оси приборной системы координат, на фиг.12 - расположение проекций измерительных осей лазерных гироскопов на плоскости, перпендикулярной первой оси приборной системы координат.
Блок преобразователей инерциальной информации (фиг.1) содержит основание 1, в центральной части которого к нему прикреплены первый 2' и второй 2” вибраторы системы возбуждения угловых колебаний. Первый оптический блок 3' прикреплен к внутреннему кольцу 4 вибратора 2' посредством шпильки 5, шайбы 6 и гайки 7. Аналогичным способом к вибратору 2” прикреплен второй оптический блок 3”.
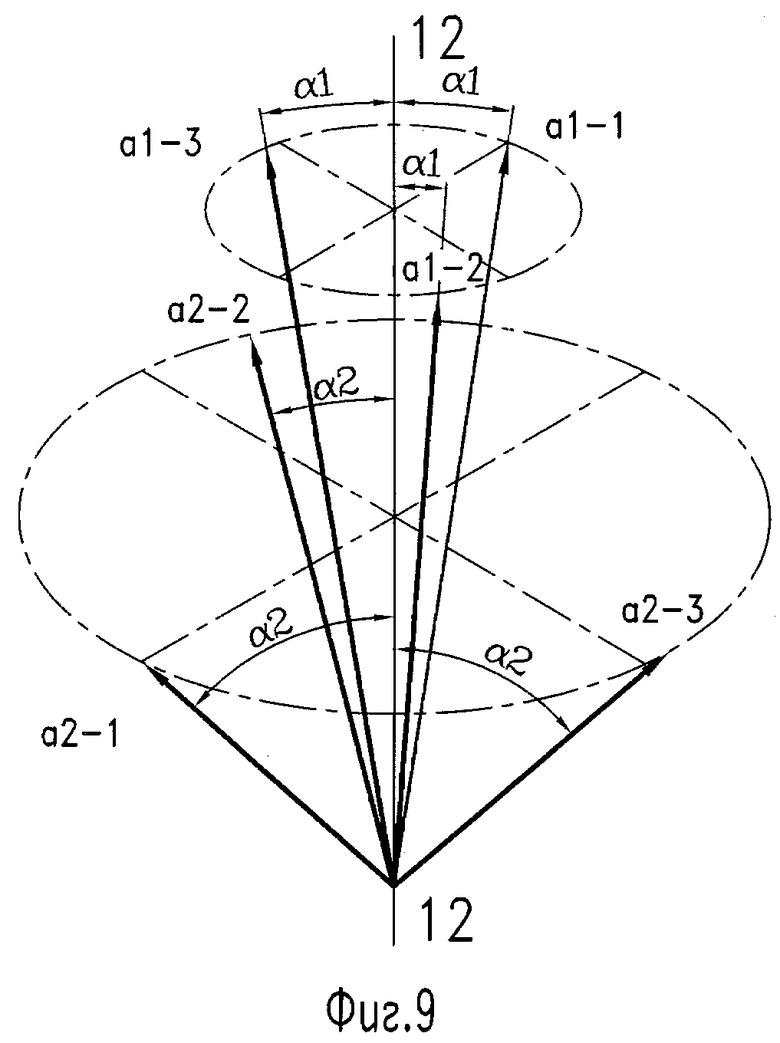
На боковой поверхности основания 1 выполнена посадочная площадка 8', на которую опирается установочная плоскость первого акселерометра 9' из первой группы акселерометров, размещенных в основании 1. На посадочной площадке 10' основания 1 базируется установочная плоскость первого акселерометра 11' из второй группы акселерометров, расположенных в основании 1. Плоскость посадочной площадки 8' расположена под углом α1=37,377…° относительно оси 12-12 блока преобразователей инерциальной информации, которая совпадает с первой осью приборной системы координат блока преобразователей инерциальной информации, плоскость посадочной площадки 10' расположена под углом α2=79,187.…° относительно оси 12-12.
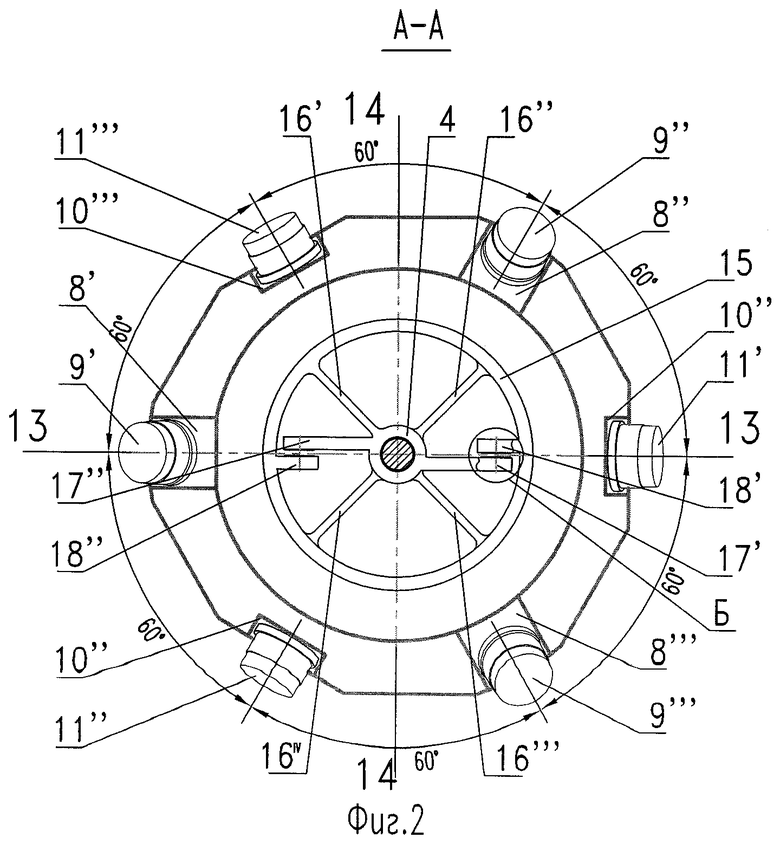
На боковой поверхности основания 1 (фиг.2) кроме посадочной площадки 8' образованы посадочные площадки 8”, 8'”, на которых установлены соответственно второй 9” и третий 9'” акселерометры из первой группы акселерометров. Плоскости посадочных площадок 8”, 8'” также расположены под углом α1 относительно оси 12-12. Кроме посадочной площадки 10' на боковой поверхности основания 1 под углом α2 к оси 12-12 выполнены посадочные площадки 10”, 10'”, на которые установлены соответственно второй 11” и третий 11'” акселерометры второй группы акселерометров. Каждый из акселерометров 9', 9”, 9'”, 11', 11”, 1'” имеет фланец с установочной плоскостью, перпендикулярной измерительной оси акселерометра. Монтаж акселерометра на основание 1 осуществляется так, чтобы его установочная плоскость располагалась на посадочной площадке основания 1. В результате измерительные оси акселерометров 9', 9”, 9'” первой группы акселерометров перпендикулярны соответственно плоскостям посадочных площадок 8', 8”, 8'”, а измерительные оси акселерометров 11', 11”, 11'” второй группы акселерометров перпендикулярны соответственно плоскостям посадочных площадок 10', 10”, 10'”. В виде в плоскости, перпендикулярной оси 12-12 и образованной второй 13-13 и третьей 14-14 осями приборной системы координат блока преобразователей инерциальной информации, акселерометр 9' первой группы акселерометров расположен в направлении оси 13-13, акселерометры 9', 9”, 9'” первой группы акселерометров и акселерометры 11', 11”, 11'” второй группы акселерометров расположены так, что акселерометры 9', 9”, 9'” первой группы акселерометров чередуются с акселерометрами 11', 11”, 11'” второй группы акселерометров через 60°. Так, например, акселерометр 11'” второй группы акселерометров расположен на угловом расстоянии 60° от акселерометра 9' первой группы акселерометров, акселерометр 9” первой группы акселерометров расположен на угловом расстоянии 60° от акселерометра 11'” второй группы акселерометров и т.д. При этом акселерометры 9', 9”, 9'” первой группы акселерометров расположены поочередно друг от друга на угловом расстоянии 120°, акселерометры 11', 11”, 11'” второй группы акселерометров отстоят друг от друга на угловом расстоянии 120°.
Внутреннее кольцо 4 вибратора 2' соединено с его внешним кольцом 15 радиальными перемычками 16', 16”, 16'”, 16IV, внутреннее кольцо 4 вибратора 2' имеет выступы 17', 17”, на внешнем кольце 15 выполнены выступы 18', 18”. Аналогичным образом выполнен вибратор 2”.
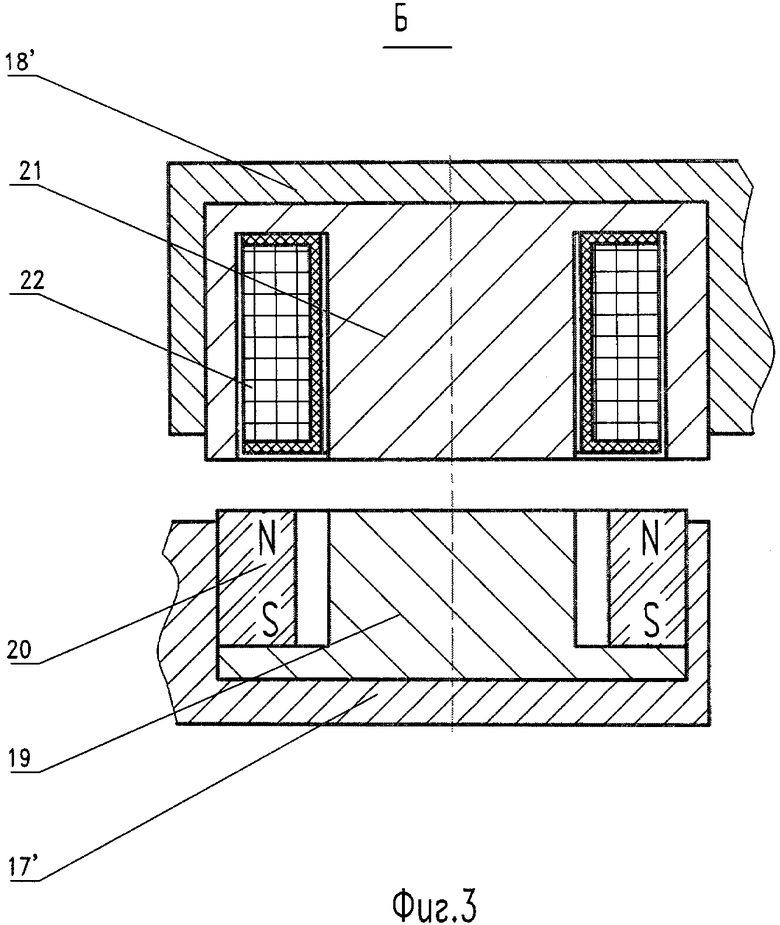
В выступе 17' (фиг.3) внутреннего кольца 4 в корпусе 19 установлен постоянный магнит 20 с радиальным направлением намагничивания, в выступе 18' внешнего кольца 15 в корпусе 21 установлена кольцевая катушка 22, обращенная к постоянному магниту 20. Такой же постоянный магнит установлен на выступе 17”, кольцевая катушка - на выступе 18”. Постоянные магниты и кольцевые катушки образуют исполнительный элемент системы возбуждения угловых колебаний первого оптического блока 3'. Система возбуждения угловых колебаний также содержит электронный генератор переменного тока, к выходу которого подключены кольцевые катушки. Частота выходного напряжения электронного генератора переменного тока выполнена равной частоте механического резонанса перемычек 16', 16”, 16'”, 16IV.
Система возбуждения угловых колебаний второго оптического блока 3” содержит вибратор 2” с постоянными магнитами на выступах на внутреннем кольце и кольцевыми катушками на выступах на внешнем кольце, свой электронный генератор переменного тока, к выходу которого подключены кольцевые катушки на вибраторе 2”. Частота выходного напряжения электронного генератора переменного тока выполнена равной частоте механического резонанса перемычек, его выходное напряжение находится в противофазе относительно выходного напряжения электронного генератора переменного тока системы возбуждения угловых колебаний первого оптического блока 3'.
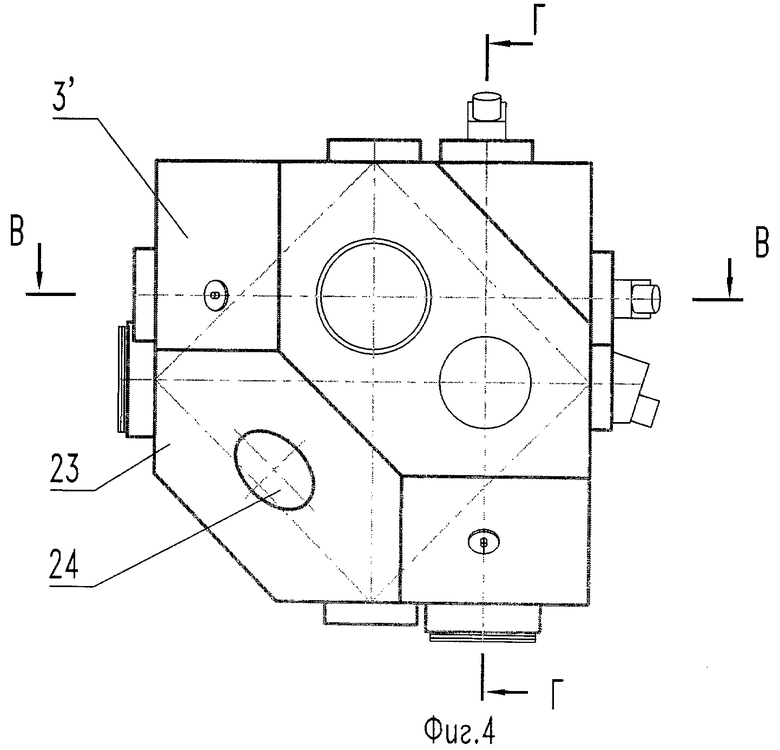
Первый оптический блок 3' (фиг.4) выполнен из оптически прозрачного материала, например ситалла, из заготовки кубической формы. Начиная от образованной срезом вершины первого трехгранного угла куба плоскости 23', в первом оптическом блоке 3' образовано центральное отверстие 24.
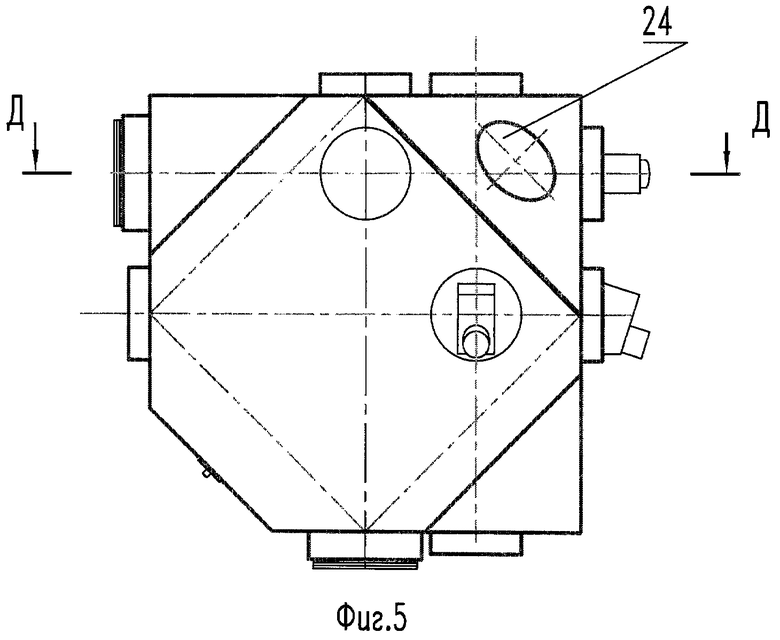
Отверстие 24 (фиг.5) проходит от плоскости 23' по диагонали куба до плоскости 23”, полученной срезом вершины второго трехгранного угла куба, противоположного первому трехгранному углу.
При монтаже первого оптического блока 3' его устанавливают на запрессованную во внутреннем кольце 4 первого вибратора 2' шпильку 5 отверстием 24 со стороны плоскости 23' и закрепляют посредством шайбы 6 и гайки 7 на плоскости 23”. Аналогичным способом устанавливают второй оптический блок 3” на второй вибратор 2”.
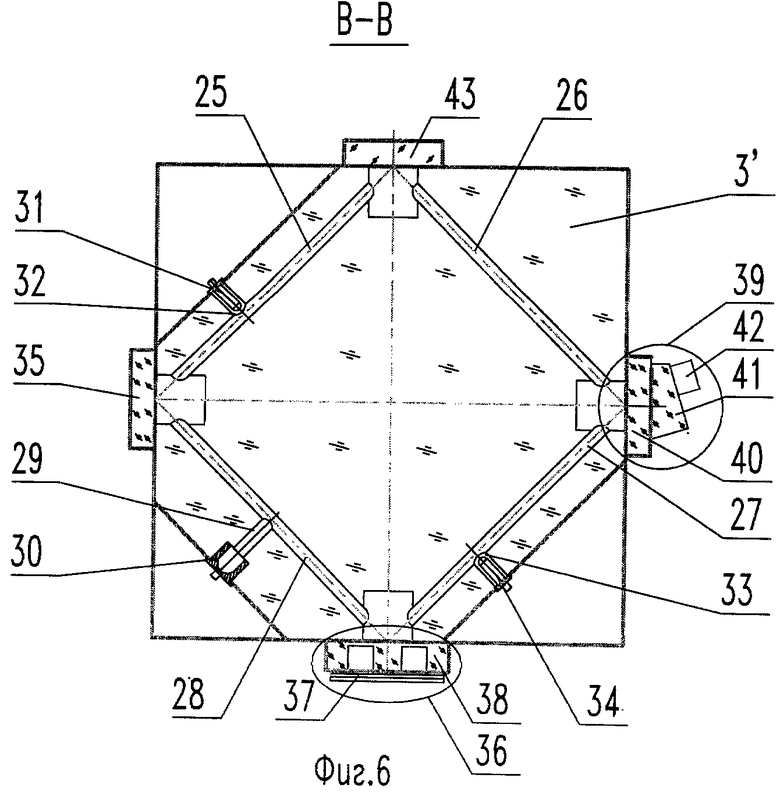
В плоскости в разрезе по В-В (фиг.6) первого оптического блока 3' выполнен контур первого лазерного гироскопа, содержащий первый 25, второй 26, третий 27 и четвертый 28 каналы в теле первого оптического блока 3'. В соединенном с каналом 28 отверстии 29 установлен катод 30. Первый анод 31 помещен в отверстии 32, соединенном с каналом 25. С каналом 27 соединено отверстие 33, в которое вставлен второй анод 34. В месте соединения каналов 25 и 28 установлен рефлектор 35. Устройство 36 для регулировки периметра контура с пакетом 37 пьезокерамических пластин и рефлектором 38 расположено в месте соединения каналов 27 и 28. В месте соединения каналов 26 и 27 установлено устройство 39 съема сигналов лазерного гироскопа с полупрозрачным зеркалом 40, призмой 41 и фотоприемником 42. Рефлектор 43 расположен в месте соединения каналов 25 и 26.
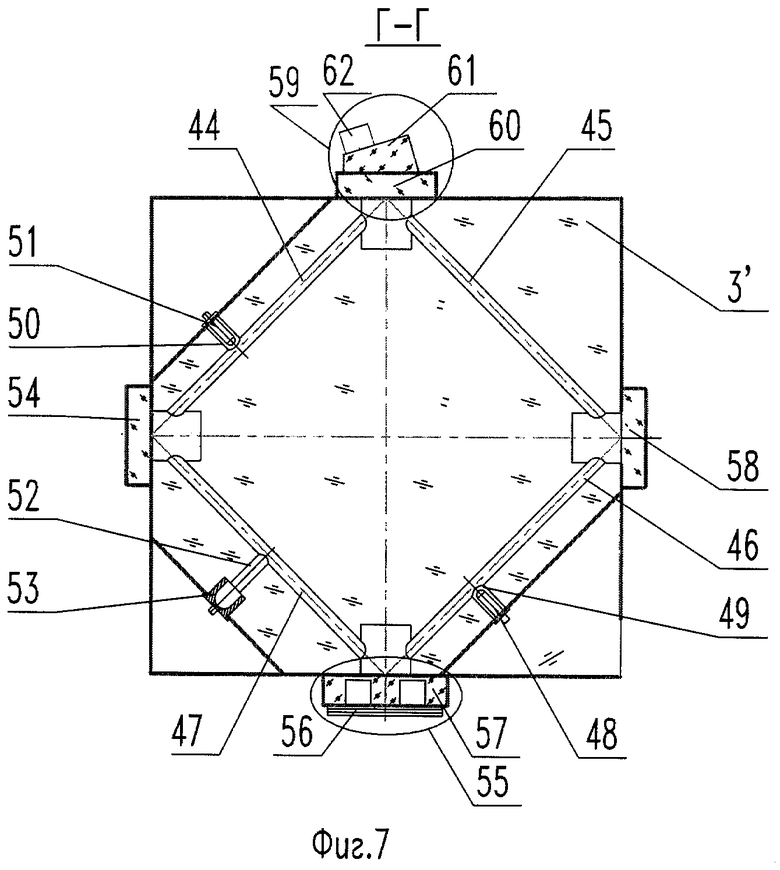
В плоскости в разрезе по Г-Г (фиг.7) первого оптического блока 3' выполнен контур второго лазерного гироскопа, содержащий первый 44, второй 45, третий 46 и четвертый 47 каналы. Первый анод 48 помещен в отверстии 49, соединенном с каналом 46. С каналом 44 соединено отверстие 50, в которое вставлен второй анод 51. В соединенном с каналом 47 отверстии 52 установлен катод 53. В месте соединения каналов 44 и 47 установлен рефлектор 54. Устройство 55 для регулировки периметра контура второго лазерного гироскопа с пакетом 56 пьезокерамических пластин и рефлектором 57 расположено в месте соединения каналов 46 и 47. Рефлектор 58 расположен в месте соединения каналов 45 и 46. В месте соединения каналов 44 и 45 установлено устройство 59 съема сигналов лазерного гироскопа с полупрозрачным зеркалом 60, призмой 61 и фотоприемником 62.
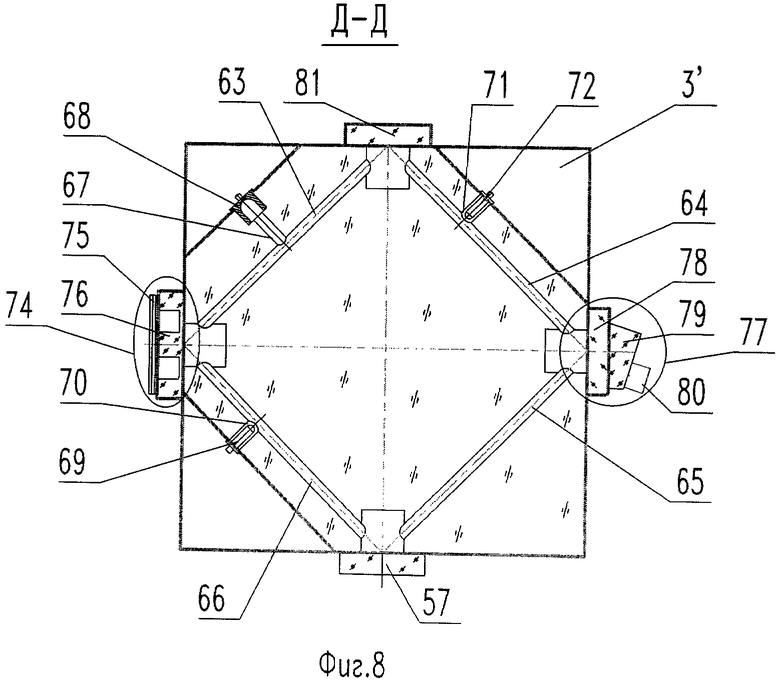
В разрезе по Д-Д (фиг.8) в теле первого оптического блока 3' выполнен контур третьего лазерного гироскопа, содержащий первый 63, второй 64, третий 65 и четвертый 66 каналы. В соединенном с каналом 63 отверстии 67 установлен катод 68. Первый анод 69 помещен в отверстии 70, соединенном с каналом 66. С каналом 64 соединено отверстие 71, в которое вставлен второй анод 72. В месте соединения каналов 65 и 66 установлен рефлектор 73. Устройство 74 для регулировки периметра контура с пакетом 75 пьезокерамических пластин и рефлектором 76 расположено в месте соединения каналов 63 и 66. В месте соединения каналов 64 и 65 установлено устройство 77 съема сигналов лазерного гироскопа с полупрозрачным зеркалом 78, призмой 79 и фотоприемником 80. Рефлектор 81 расположен в месте соединения каналов 63 и 64.
Так же, как и первый оптический блок 3', выполнен второй оптический блок 3”.
Каналы лазерных гироскопов первого 3' и второго 3” оптических блоков заполнены газовой смесью, состоящей, например, из смеси гелия и неона.
Все лазерные гироскопы первого 3' и второго 3” оптических блоков выполнены одинаковым образом. Так, например, у первого лазерного гироскопа первого оптического блока 3' (фиг.6) заполненные газовой смесью каналы 25, 26, 27, 28, устройство 36 для регулировки периметра контура, рефлекторы 35, 43, зеркало 40 образуют резонатор первого лазерного гироскопа. Для обеспечения работы лазерного гироскопа предназначены высоковольтный источник питания постоянного тока и электронная схема регулировки периметра контура. Применительно к первому лазерному гироскопу первого оптического блока 3' высоковольтный источник питания постоянного тока подключен к анодам 31, 34 и катоду 30, вход электронной схемы регулировки периметра контура соединен с выходом фотоприемника 42, в качестве которого может быть использован фотодиод. Выход электронной схемы регулировки периметра контура подключен к пакету 37 пьезокерамических пластин.
В блоке преобразователей инерциальной информации первый оптический блок 3' установлен на внутреннем кольце 4 вибратора 2' так, что нормали к контурам первого, второго и третьего лазерных гироскопов расположены под углом 54,7356° к оси 12-12. В результате измерительные оси первого, второго и третьего лазерных гироскопов находятся на угловом расстоянии 54,7356° от первой оси приборной системы координат блока преобразователей инерциальной информации. Второй оптический блок 3” установлен на внутреннем кольце вибратора 2” так, что нормали к контурам первого, второго и третьего лазерных гироскопов второго оптического блока 3” расположены под углом 125,2644° к оси 12-12. Поэтому измерительные оси первого, второго и третьего лазерных гироскопов второго оптического блока 3" находятся на угловом расстоянии 125,2644° от первой оси приборной системы координат блока преобразователей инерциальной информации.
У акселерометров первой группы (фиг.9) измерительная ось а1-1 акселерометра 9', измерительная ось а1-2 акселерометра 9”, измерительная ось а1-3 акселерометра 9'” расположены под углом α1=37.377…° к оси 12-12, являющейся первой осью приборной системы координат блока преобразователей инерциальной информации. У акселерометров второй группы измерительная ось а2-1 акселерометра 11', измерительная ось а2-2 акселерометра 11”, измерительная ось а2-3 акселерометра 11'” расположены под углом α2=79.187…° к оси 12-12.
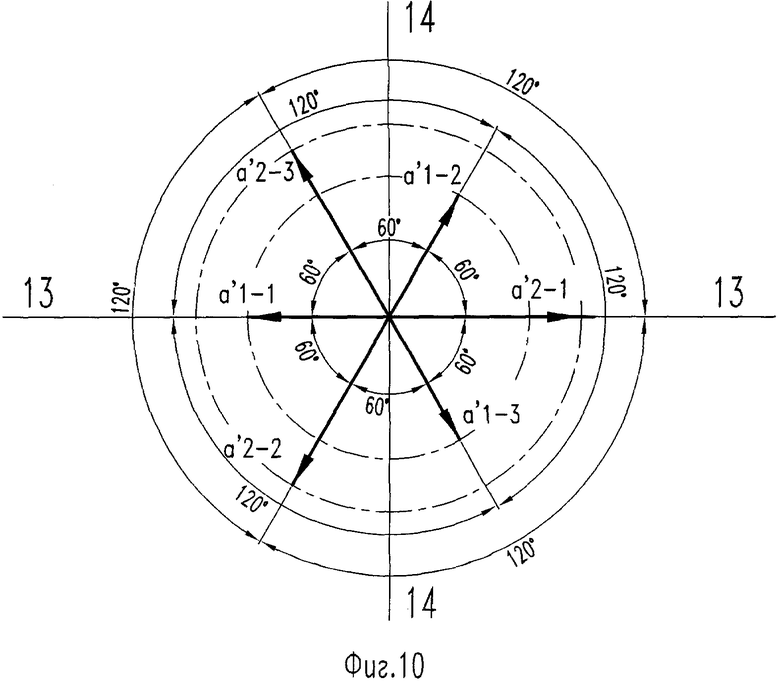
В проекции на плоскость, перпендикулярную оси 12-12 (фиг.10) и образованную второй 13-13 и третьей 14-14 осями приборной системы координат блока преобразователей инерциальной информации, проекция а'1-1 измерительной оси акселерометра 9' совпадает с направлением оси 13-13, проекция а'1-2 измерительной оси акселерометра 9” отстоит от проекции а'1-1 измерительной оси акселерометра 9' на угловом расстоянии 120°, проекция а'1-3 измерительной оси акселерометра 9'” отстоит от проекции а'1-2 измерительной оси акселерометра 9” и проекции а'1-1 измерительной оси акселерометра 9' на угловом расстоянии 120°. Проекция а'2-1 измерительной оси акселерометра 11' совпадает с направлением оси 13-13 и противоположна проекции а'1-1 измерительной оси акселерометра 9', проекция а'2-2 измерительной оси акселерометра 11” отстоит от проекции а'2-1 измерительной оси акселерометра 11' на угловом расстоянии 120°, проекция а'2-3 измерительной оси акселерометра 11'” отстоит от проекции а'2-2 измерительной оси акселерометра 11” и проекции а'2-1 измерительной оси акселерометра 11' на угловом расстоянии 120°. Проекции а'1-1, а'1-2, а'1-3 измерительных осей акселерометров 9', 9”, 9'” первой группы чередуются с проекциями а'2-1, а'2-2, а'2-3 измерительных осей акселерометров 11', 11”, 11'” второй группы с угловыми расстояниями 60° между ними.
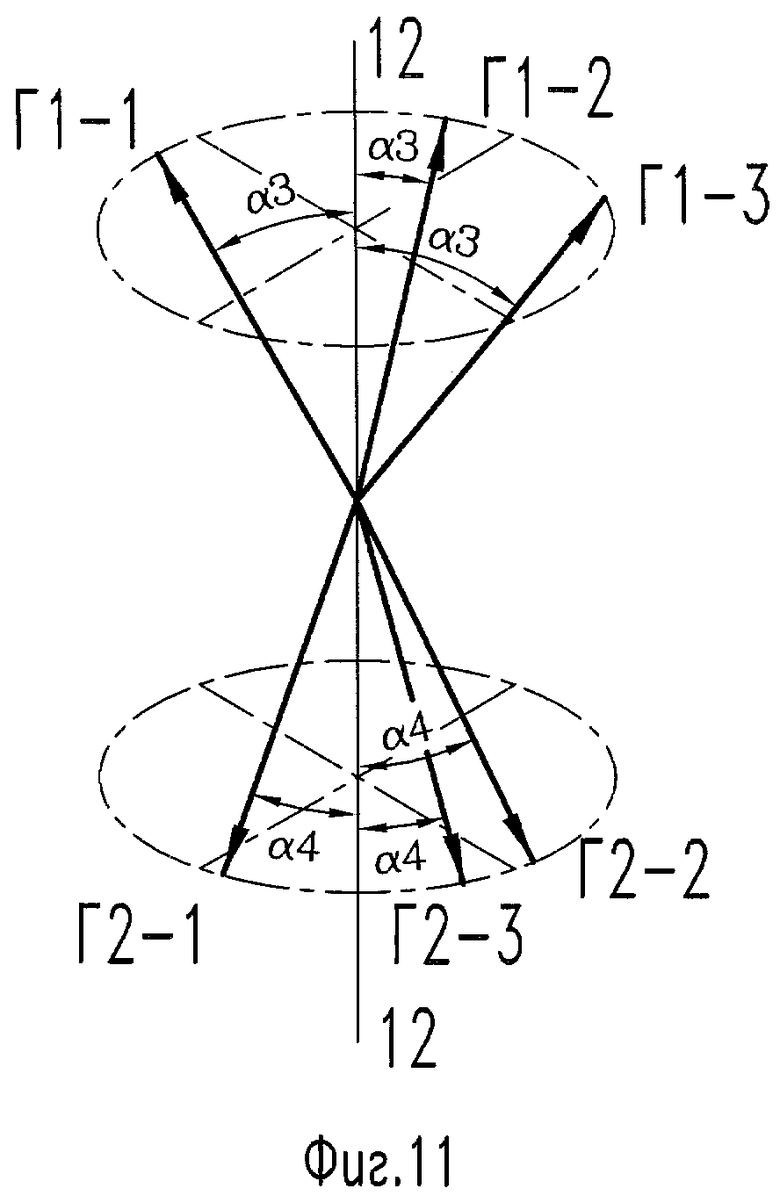
Измерительная ось Г1-1 (фиг.11) первого лазерного гироскопа, измерительная ось Г1-2 второго лазерного гироскопа, измерительная ось Г1-3 третьего лазерного гироскопа первого оптического блока 3' расположены под углом α3=54,7356° к оси 12-12. Измерительная ось Г2-1 первого лазерного гироскопа, измерительная ось Г2-2 второго лазерного гироскопа, измерительная ось Г2-3 третьего лазерного гироскопа второго оптического блока 3” расположены под углом α4=125,2644° к оси 12-12.
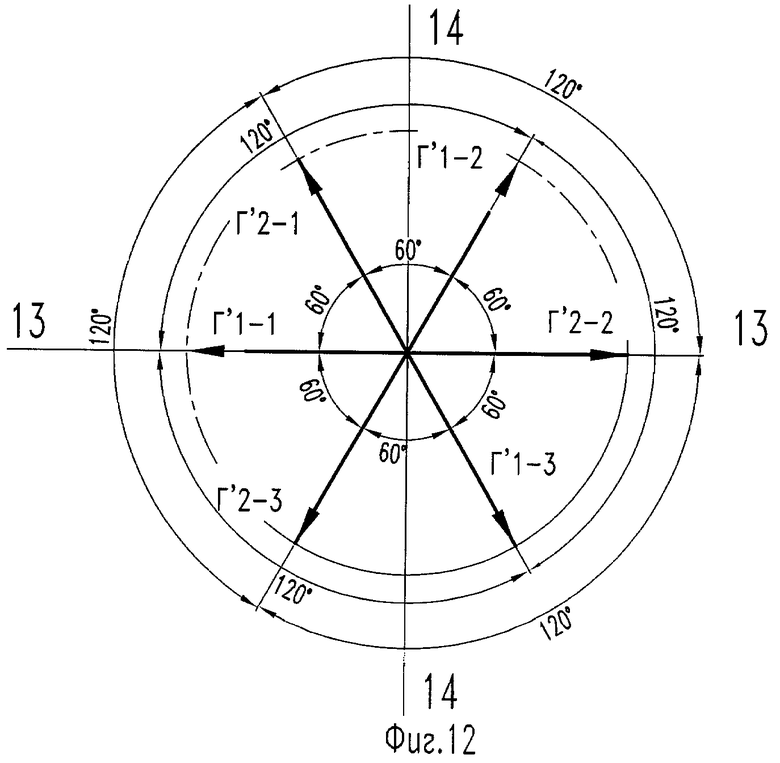
В проекции на плоскость, перпендикулярную оси 12-12 (фиг.12) и образованную второй 13-13 и третьей 14-14 осями приборной системы координат блока преобразователей инерциальной информации, проекция Г'1-1 измерительной оси первого лазерного гироскопа первого оптического блока 3' совпадает с направлением оси 13-13, проекция Г'1-2 измерительной оси второго лазерного гироскопа отстоит от проекции Г'1-1 измерительной оси первого лазерного гироскопа на угловом расстоянии 120°, проекция Г'1-3 измерительной оси третьего лазерного гироскопа отстоит от проекции Г'1-2 измерительной оси второго лазерного гироскопа и проекции Г'1-1 измерительной оси первого лазерного гироскопа на угловом расстоянии 120°. Проекция Г'2-1 измерительной оси первого лазерного гироскопа второго оптического блока 3” совпадает с направлением оси 13-13 и противоположна проекции Г'1-1 измерительной оси первого лазерного гироскопа первого оптического блока 3', проекция Г'2-2 измерительной оси второго лазерного гироскопа второго оптического блока 3” отстоит от проекции Г'2-1 измерительной оси первого лазерного гироскопа на угловом расстоянии 120°, проекция Г'2-3 измерительной оси третьего лазерного гироскопа отстоит от проекции Г'2-2 измерительной оси второго лазерного гироскопа и проекции Г'2-1 измерительной оси первого лазерного гироскопа на угловом расстоянии 120°. Проекции Г'1-1, Г'1-2, Г'1-3 измерительных осей лазерных гироскопов первого оптического блока 3' чередуются с проекциями Г'2-1, Г'2-2, Г'2-3 измерительных осей лазерных гироскопов второго оптического блока 3” с угловыми расстояниями 60°.
Принцип работы всех лазерных гироскопов первого 3' и второго 3” оптических блоков одинаков. Так, например, в первом лазерном гироскопе первого оптического блока 3' (фиг.6) в результате прохождения токов от первого анода 31 и второго анода 34 к катоду 30 в резонаторе возникают оптические волны, обходящие периметр контура в двух противоположных направлениях. При наличии угловой скорости относительно измерительной оси Г1-1 первого лазерного гироскопа возникает разность частот Δf между противоположно направленными оптическими волнами, пропорциональная угловой скорости. Фотоприемник 42 преобразует разность частот Δf между противоположно направленными оптическими волнами в напряжение переменного тока с частотой Δf, пропорциональной измеряемой угловой скорости, которое является выходным сигналом лазерного гироскопа.
При изменении периметра контура изменяется величина токов от анодов 31, 34 к катоду 30, а на выходе фотоприемника 42 изменяется амплитуда выходного напряжения. После преобразования выходного напряжения фотоприемника 42 в электронной схеме регулировки периметра с его выхода на пакет 37 пьезоэлектрических пластин подается напряжение постоянного тока, пропорциональное изменению амплитуды выходного напряжения фотоприемника 42. В результате деформации пакета 37 пьезоэлектрических пластин изменяется кривизна рефлектора 38 так, чтобы произошло восстановление первоначального периметра контура.
Блок преобразователей инерциальной информации работает следующим образом. При наличии линейного ускорения каждый из акселерометров 9', 9”, 9'” 11', 11”, 11'” преобразует линейное ускорение в выходной сигнал, пропорциональный проекции вектора линейного ускорения на измерительную ось акселерометра. Вследствие того что угловые расстояния между измерительными осями a1-1, a1-2, a1-3, а2-1, а2-2, а2-3 акселерометров 9', 9”, 9'”, 11', 11”, 11'” не кратны 90°, измерительная ось каждого из акселерометров 9',9”, 9'”, 11', 11”, 11'” образует свое угловое положение относительно вектора линейного ускорения, отличное от угловых положений относительно вектора линейного ускорения измерительных осей других акселерометров. Так как для измерения вектора линейного ускорения достаточно результатов измерения трех акселерометров (триады акселерометров), измерительные оси которых не колинеарны, то образуется сочетание двадцати триад акселерометров, измеряющих вектор линейного ускорения. Если показания каждого акселерометра адекватны проекции вектора линейного ускорения на его измерительную ось, то результат измерения вектора линейного ускорения всех двадцати триад идентичен.
При возникновении погрешности измерения вектора линейного ускорения, превышающей допустимую у одного из акселерометров 9', 9”, 9'”, 11', 11”, 11'” блока преобразователей инерциальной информации, обнаруживается несколько триад акселерометров, результаты измерения вектора линейного ускорения которых не идентичны с результатами измерения остальных триад. По тому, какой из акселерометров входит в эти триады, отличающиеся по результатам измерения вектора линейного ускорения, происходит отбраковка показаний акселерометра с погрешностью измерения линейного ускорения.
Так как после отбраковки одного из акселерометров в блоке преобразователей инерциальной информации остается комбинация триад из пяти акселерометров, то обеспечивается отбраковка еще одного акселерометра. Таким образом происходит исключение из результатов измерения вектора линейного ускорения двух отказавших акселерометров. Тем самым достигается большая степень параметрического резервирования блока преобразователей инерциальной информации в отношении измерения линейного ускорения.
При наличии угловой скорости каждый из трех лазерных гироскопов первого оптического блока 3' и трех лазерных гироскопов второго оптического блока 3” преобразует угловую скорость в выходной сигнал, пропорциональный проекции вектора угловой скорости на измерительную ось лазерного гироскопа. При этом в трех парах лазерных гироскопов результаты измерения проекции вектора угловой скорости равны по величине, но противоположны по знаку. Одну такую пару составляют первый лазерный гироскоп первого оптического блока 3' с направлением его измерительной оси Г1-1 и второй лазерный гироскоп второго оптического блока 3” с направлением его измерительной оси Г2-2, вторую пару образуют второй лазерный гироскоп первого оптического блока 3' с направлением его измерительной оси Г1-2 и третий лазерный гироскоп второго оптического блока 3” с направлением его измерительной оси Г2-3, третью пару составляют третий лазерный гироскоп первого оптического блока 3' с направлением его измерительной оси Г1-3 и первый лазерный гироскоп второго оптического блока 3” с направлением его измерительной оси Г2-1. При отсутствии сигнала измерения угловой скорости одного из лазерных гироскопов одной из пар лазерных гироскопов при определении вектора угловой скорости исключаются показания лазерного гироскопа с отсутствующим сигналом измерения угловой скорости, и для определения вектора угловой скорости принимается сигнал измерения угловой скорости второго лазерного гироскопа из той пары, в которую входит исключенный лазерный гироскоп.
Таким образом обеспечивается резервирование блока преобразователей инерциальной информации в отношении измерения вектора угловой скорости.
Посредством обеспечения большей степени параметрического резервирования блока преобразователей инерциальной информации в отношении измерения линейного ускорения и резервирования блока преобразователей инерциальной информации в отношении измерения вектора угловой скорости достигается повышение надежности блока преобразователей инерциальной информации.
Так как вибраторы 2' и 2” выполнены одинаковым образом, второй оптический блок 3” выполнен так же, как и первый оптический блок 3', вибратор 2” и второй оптический блок 3” установлены на основании 1 по отношению к вибратору 2' и первому оптическому блоку 3' симметрично относительно плоскости, перпендикулярной оси 12-12, система возбуждения угловых колебаний выполнена так, что угловые колебания второго оптического блока 3” противофазны угловым колебаниям первого оптического блока 3', то возникающие при действии системы возбуждения угловых колебаний угловые колебания первого оптического блока 3' относительно перпендикулярной оси 12-12 оси компенсируются угловыми колебаниями второго оптического блока 3” относительно оси, перпендикулярной оси 12-12, и наоборот, угловые колебания второго оптического блока 3” относительно перпендикулярной оси 12-12 оси компенсируются угловыми колебаниями первого оптического блока 3' относительно оси, перпендикулярной оси 12-12. Вследствие этого измерительные оси лазерных гироскопов первого 3' и второго 3” оптических блоков не изменяют свое положение относительно оси 12-12, в результате чего в их сигналы не вносится погрешность измерения угловой скорости.
Таким образом обеспечивается повышение точности измерения вектора угловой скорости посредством блока преобразователей инерциальной информации.
Так как система возбуждения угловых колебаний выполнена так, что угловые колебания второго оптического блока 3” противофазны угловым колебаниям первого оптического блока 3', то минимизируются передаваемые на основание 1 вибрационные воздействия вследствие компенсации возбуждаемых первым вибратором 2' вибраций возбуждаемыми вибрациями вторым вибратором 2” и наоборот.
Вследствие минимальных значений вибрационного ускорения, передаваемого на основание 1 от системы возбуждения угловых колебаний первого 3' и второго 3" оптических блоков, минимизируются вибрационные погрешности акселерометров 9', 9”, 9'”, 11', 11”, 11'”.
В результате повышается точность измерения вектора линейного ускорения посредством акселерометров блока преобразователей инерциальной информации.
Источники информации
1. Патент РФ №2123665 С1, кл. G01C 23/00. Бесплатформенная инерциальная навигационная система подводного аппарата. 28.05.97.
2. Патент РФ №2277696 С2, кл. G01C 23/00. Интегрированная инерциально-спутниковая навигационная система. 21.04.04.
3. Патент РФ №2362977, кл. G01C 21/10. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных систем и устройство для его осуществления. 27.07.09.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
Изобретение относится к области приборостроения, а именно к бесплатформенным инерциальным навигационным системам. Блок содержит основание с двумя группами из трех акселерометров и двумя оптическими блоками с тремя лазерными гироскопами, систему возбуждения угловых колебаний оптических блоков. Измерительная ось каждого из акселерометров первой группы акселерометров расположена на угловом расстоянии 37,377…° относительно одной из осей приборной системы координат, измерительная ось каждого из акселерометров второй группы акселерометров расположена на угловом расстоянии 79,187…° относительно вышеуказанной оси. Измерительная ось каждого из лазерных гироскопов первого оптического блока расположена на угловом расстоянии 54,7356° относительно вышеуказанной оси, а измерительная ось каждого из лазерных гироскопов второго оптического блока расположена на угловом расстоянии 125,2644° относительно вышеуказанной оси. Система возбуждения угловых колебаний выполнена так, что угловые колебания второго оптического блока противофазны угловым колебаниям первого оптического блока. Изобретение позволяет повысить надежность и точность блока. 2 з.п. ф-лы, 12 ил.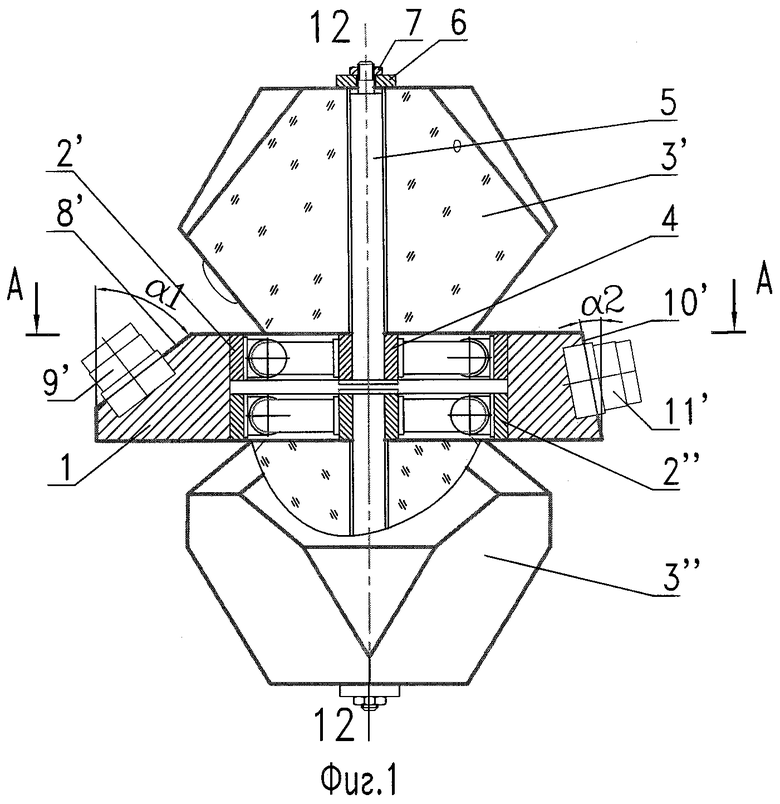
1. Блок преобразователей инерциальной информации, содержащий основание с установленными на нем первой группой из трех акселерометров и первым оптическим блоком с тремя лазерными гироскопами, систему возбуждения угловых колебаний оптического блока с лазерными гироскопами относительно первой из трех взаимно перпендикулярных осей приборной системы координат блока преобразователей инерциальной информации, отличающийся тем, что в него введены второй оптический блок с тремя лазерными гироскопами, установленная на основании вторая группа из трех акселерометров, измерительная ось каждого из акселерометров первой группы акселерометров расположена на угловом расстоянии 37,377…° относительно первой оси приборной системы координат, измерительная ось каждого из акселерометров второй группы акселерометров расположена на угловом расстоянии 79,187…° относительно первой оси, акселерометры первой и второй групп установлены на основании так, что проекции на перпендикулярную первой оси плоскость измерительных осей первой группы акселерометров чередуются с проекциями на вышеуказанную плоскость измерительных осей второй группы акселерометров с угловым расстоянием между ними в 60°; измерительная ось каждого из лазерных гироскопов первого оптического блока лазерных гироскопов расположена на угловом расстоянии 54,7356° относительно первой оси приборной системы координат, измерительная ось каждого из лазерных гироскопов второго оптического блока расположена на угловом расстоянии 125,2644° относительно первой оси, лазерные гироскопы в первом и втором оптических блоках выполнены так, что проекции на перпендикулярную первой оси плоскость измерительных осей первого оптического блока лазерных гироскопов чередуются с проекциями на вышеуказанную плоскость измерительных осей второго оптического блока лазерных гироскопов с угловым расстоянием между ними в 60°; система возбуждения угловых колебаний выполнена так, что угловые колебания второго оптического блока лазерных гироскопов противофазны угловым колебаниям первого оптического блока лазерных гироскопов.
2. Блок преобразователей инерциальной информации по п.1, отличающийся тем, что акселерометры первой и второй групп установлены на основании так, что проекция на плоскость, перпендикулярную первой оси приборной системы координат блока преобразователей инерциальной информации, измерительной оси одного из акселерометров первой или второй групп совмещена с одной из осей приборной системы координат, лежащей в вышеуказанной плоскости.
3. Блок преобразователей инерциальной информации по п.1 или 2, отличающийся тем, что первый и второй оптические блоки лазерных гироскопов установлены на основании так, что проекция на плоскость, перпендикулярную первой оси приборной системы координат блока преобразователей инерциальной информации, измерительной оси одного из лазерных гироскопов первого или второго оптических блоков совмещена с одной из осей приборной системы координат, лежащей в вышеуказанной плоскости.
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА | 1997 |
|
RU2123665C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| CN 101922938 A, 22.12.2010 | |||
| US 4675820 A, 23.06.1987. | |||

