Изобретение относится к измерительной технике, в частности к определению профиля поверхности дорожного покрытия с помощью транспортных средств, движущихся вдоль его профиля, например при строительстве или эксплуатации дорог.
Известные способы определения технико-эксплуатационных показателей дорожных покрытий предполагают в основном размещение датчиков контролируемых параметров на подрессоренной части автомобиля (выше рессор), в кузове или на специальных виброизолированных или связанных с кузовом посредством шарнирного соединения измерительных тележках (см., например, патент РФ N 2109874, МКИ E 01 С 23/07, 1996; патент РФ N 2112829, МКИ E 01 С 23/07, 1996; патент РФ N 2114242, МКИ E 01 С 23/07, 1996).
Недостатками известных способов и реализующих их устройств являются большое количество датчиков измерения параметров, сложность измерительно-вычислительного комплекса и программного обеспечения, значительные массогабаритные характеристики вспомогательного оборудования специальных измерительных тележек, в связи с чем снижается надежность работы аппаратуры, испытывающей изменяющиеся нагрузки в процессе движения автомобиля.
Наиболее близким аналогом предлагаемого способа является известный способ определения кривизны и уклонов профиля дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном ему направлении, включающий измерение ускорения автомобиля, измерение линейной скорости движения автомобиля, пройденного пути и времени движения, угловой скорости поворота или курсового угла и последующее определение уклонов и кривизны профиля дорожного покрытия с помощью ПЭВМ (персонального компьютера) путем вычисления значения ускорения, пропорционального ускорению силы тяжести и уклону профиля покрытия в направлении движения и поперечном ему, последующего вычисления величины продольного и поперечного уклонов профиля для заданного отрезка пути (см. патент РФ N 2114391, МКИ G 01 С 7/04, 1996).
Наиболее близким аналогом предлагаемого устройства является известное устройство для определения кривизны и уклонов профиля поверхности дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном ему направлении, содержащее измерительно-вычислительный комплекс с ПЭВМ, датчики линейной скорости движения автомобиля, пройденного пути, времени движения, угловой скорости или курса, средства для определения уклонов профиля поверхности дорожного покрытия, средства для определения ускорений автомобиля, систему питания (см. патент РФ N 2114392, МКИ G 01 С 7/04).
Недостатками указанного выше известного способа являются сравнительно низкая точность и достоверность результатов измерения, что обусловлено расположением акселерометров и курсового гироскопа для измерения линейных ускорений и угловой скорости автомобиля в его кузове, угловое положение которого, а следовательно, и угловое положение осей чувствительности акселерометров и гироскопа, нестабильно относительно базиса, образуемого колесами автомобиля и принятого за отсчетный, поэтому положение базисной плоскости, образуемой осями чувствительности акселерометров относительно плоскости горизонта, от которого осуществляется определение уклонов профиля дорожного покрытия, меняется, что требует дополнительной корректировки. Кроме того, в известном способе отсутствует возможность определения таких параметров качества дорожного покрытия, как его неровность и коэффициент сцепления.
Недостатки известного устройства непосредственно связаны с недостатками известного способа и обусловлены отсутствием проработки конструктивной схемы прибора, что определяет невысокую достоверность и надежность результатов измерения при относительной сложности устройства, программного обеспечения и необходимости дополнительной калибровки измерительной схемы, учитывающей колебания кузова автомобиля в вертикальной плоскости как погрешности, исключаемой при определении продольного и поперечного уклонов, а также изменения эксплуатационных характеристик колеса, приводящих к изменению рассчитываемых отрезков пройденного пути в любом из заданных интервалов времени движения автомобиля, что требует их сравнения с результатами дополнительных измерений на одних и тех же участках пути при неподвижном автомобиле и формирования поправок, учитывающих изменение длины окружности колеса автомобиля из-за изменений условий эксплуатации.
Техническим результатом от использования предлагаемой группы изобретений является повышение точности и достоверности результатов измерений за счет упрощения определения начального базиса отсчета и существенного расширения функциональных возможностей при использовании минимального количества датчиков измеряемых параметров с одновременным упрощением конструктивной схемы устройства и программного обеспечения.
Указанный технический результат для способа достигается тем, что в известном способе определения кривизны и уклонов профиля дорожного покрытия, включающем измерение ускорения автомобиля, измерение линейной скорости движения автомобиля, пройденного пути и времени движения, угловой скорости поворота или курсового угла и последующее определение уклонов и кривизны профиля дорожного покрытия с помощью ПЭВМ путем вычисления значения ускорения, пропорционального ускорению силы тяжести и уклону профиля покрытия в направлении движения и поперечным ему, последующего вычисления величины продольного и поперечного уклонов профиля для заданного отрезка пути для достижения этого результата измерение ускорения автомобиля производят в его неподрессоренной части, дополнительно измеряют ускорение в направлении нормали к базовой плоскости автомобиля, определяемой направлением движения автомобиля вдоль дороги и поперечным ему, причем положение базовой плоскости автомобиля при движении ориентируют в географической системе координат с сопровождающим трехгранником вдоль географической вертикали, по касательной к меридиану на Север и вдоль касательной к параллели на Восток, а углы уклона профиля дорожного полотна в продольном и поперечном направлении, кривизну, неровность и коэффициент сцепления дорожного покрытия определяют путем обработки сигналов о величинах ускорения и угловой скорости с учетом поправок на оценки углов уклона базовой плоскости в географической системе координат на непостоянство скорости движения автомобиля с одновременной привязкой к профилю дороги координат точек измерения по сигналам спутниковой системы навигации и одометра.
Этот же технический результат в предлагаемом устройстве достигается тем, что в устройство для определения кривизны и уклонов профиля поверхности дорожного покрытия, содержащее измерительно-вычислительный комплекс, включающий ПЭВМ, монитор, датчики линейной скорости автомобиля и пройденного пути, средства для определения параметров профиля поверхности дорожного покрытия и параметров движения автомобиля, блок питания и электрические цепи для связи указанных средств и датчиков с ПЭВМ, для достижения этого результата в него введена система спутниковой навигации контроля линейной скорости с установленными на автомобиле антенной и приемником, датчик пройденного пути выполнен в виде одометра, а средства для определения параметров профиля поверхности дорожного покрытия и параметров движения автомобиля выполнены в виде жестко установленного на задней балке подвески колес автомобиля инерциального блока, состоящего из прямоугольного корпуса, одна из осей симметрии которого ориентирована вдоль направления движения автомобиля, а также закрепленных в этом корпусе последовательно вдоль этой оси электроразъема для связи с блоком питания и ПЭВМ, блока электроники, гироскопа и блока из трех ортогонально расположенных акселерометров и датчика температуры, при этом ось чувствительности первого акселерометра ориентирована вдоль указанной оси симметрии прямоугольного корпуса, второго - вдоль оси задней балки подвески колес автомобиля, а оси чувствительности третьего акселерометра и гироскопа - вдоль нормали к плоскости расположения осей чувствительности первого и второго акселерометров.
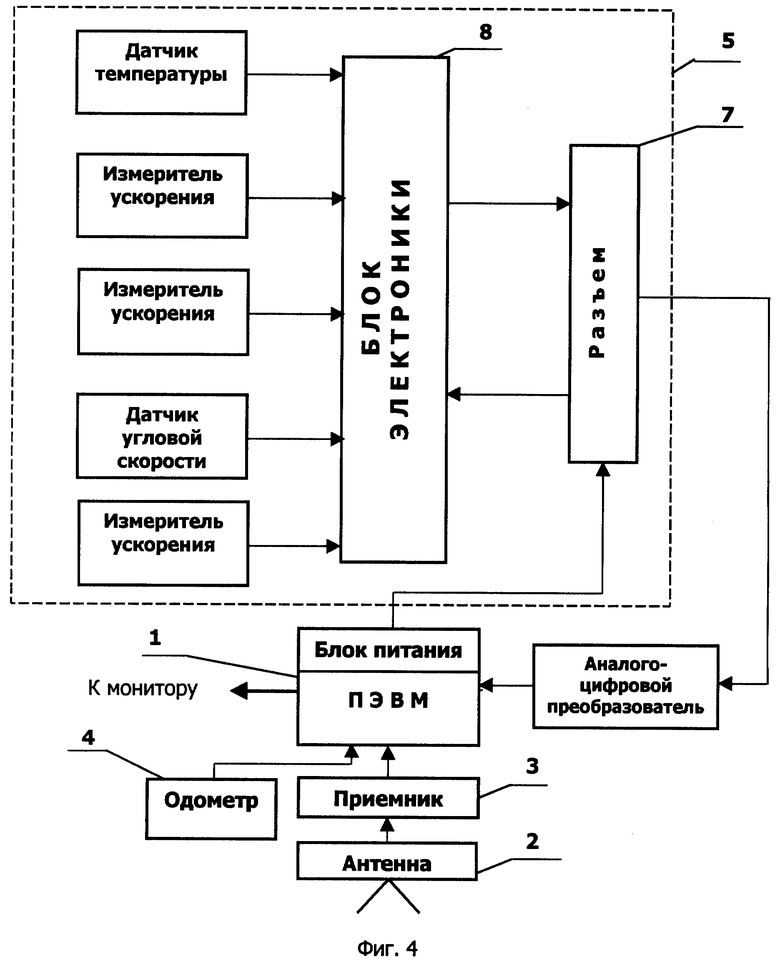
Кроме того, электрические цепи могут быть выполнены в виде аналогово-цифрового преобразователя, к входу которого через блок электроники и электроразъем подключены информационные цепи инерциального блока, а к выходу аналого-цифрового преобразователя - вход ПЭВМ, выходная цепь питания которой подключена к входу инерциального блока через электроразъем, при этом выходы приемника системы спутниковой навигации и одометра подключены к свободным входам ПЭВМ.
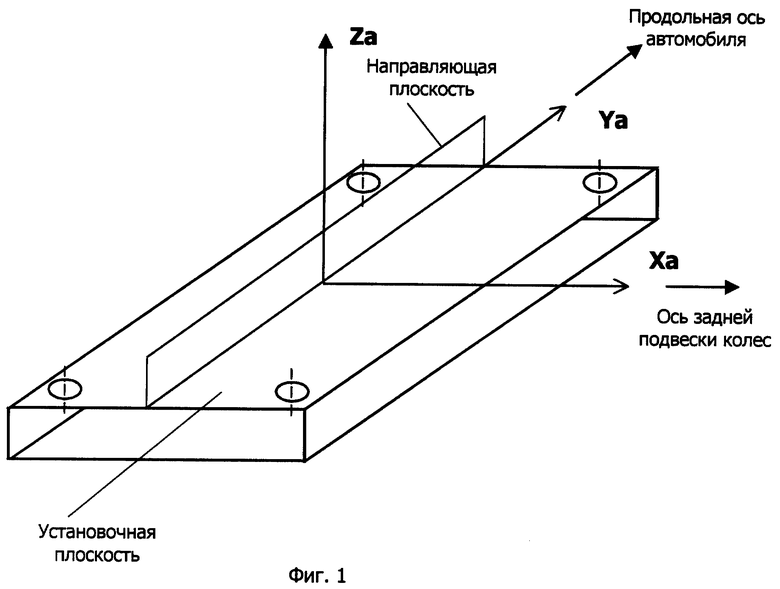
На фиг. 1 представлена схема ориентации базовой (установочной) и направляющей плоскостей для обеспечения измерений дорожных параметров предлагаемым способом.
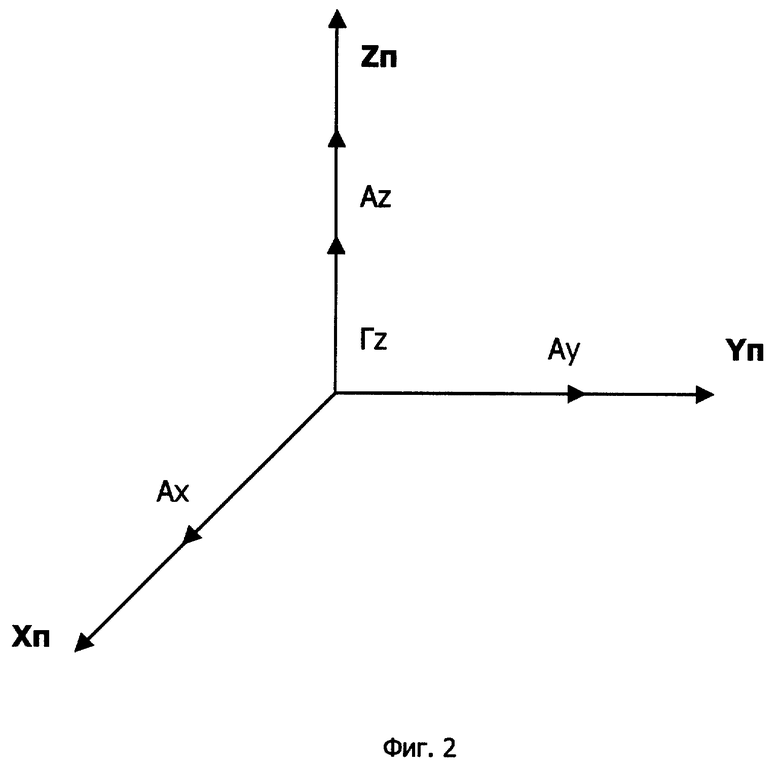
На фиг. 2 представлено положение измерителей (акселерометров А и гироскопа Г) в приборной системе координат.
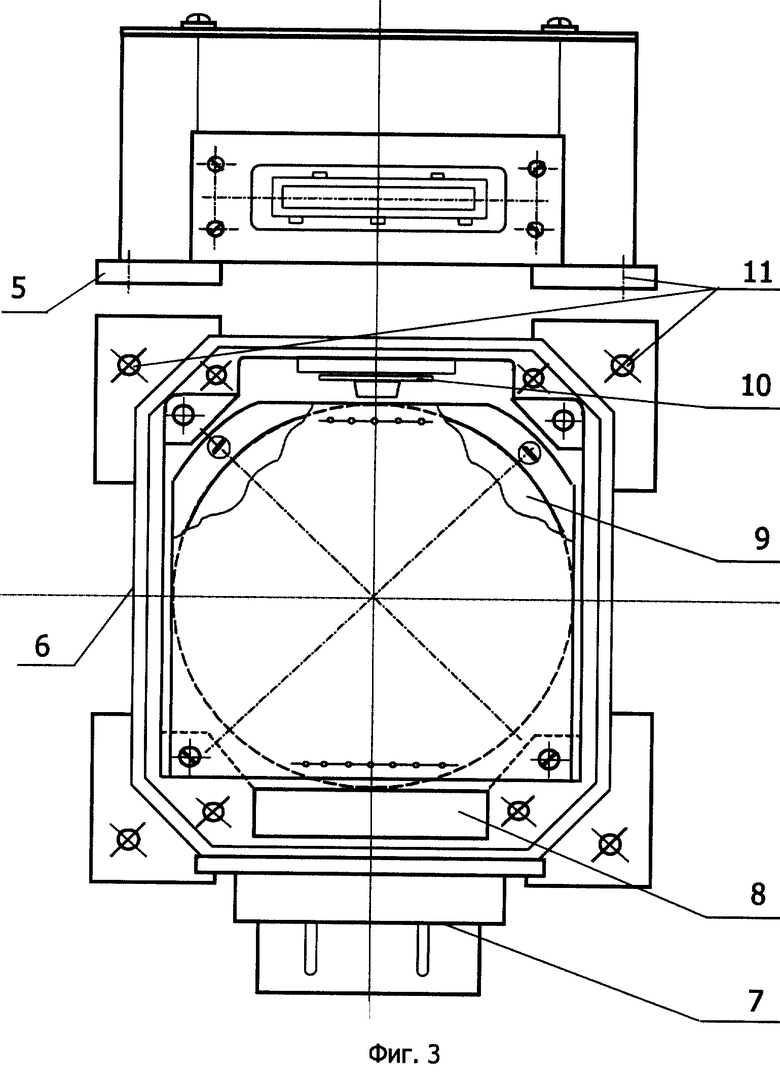
На фиг. 3 представлен общий вид устройства для осуществления способа.
На фиг. 4 представлена блок-схема подключения электрических цепей устройства.
Для использования предлагаемого способа базовая система координат OAXAYAZA должна быть ориентирована следующим образом:
- ось OAYA проходит через середину задней и передней балок подвески колес;
- ось OАXА проходит вдоль задней балки подвески колес;
- ось OАZА перпендикулярна плоскости, образуемой осями OАXАYА (базовая плоскость).
С инерциальным блоком должна быть связана приборная система координат OПXПYПZП, ориентированная следующим образом:
- ось OПYП параллельна направляющей плоскости и направлена вдоль продольной оси автомобиля;
- ось OПXП направлена вдоль задней балки подвески колес;
- ось OПZП образует с осями OПXП, OПYП (направляющая плоскость) правую систему координат.
При движении автомобиля его положение в географической системе координат с сопровождающим трехгранником вдоль географической вертикали по касательной к меридиану на Север и вдоль касательной к параллели на Восток определяется тремя углами α,β и γ, характеризующими соответственно углы уклона в продольном и поперечном направлениях и азимутальный разворот относительно вертикальной оси.
Начальное положение автомобиля по азимуту должно быть известно. Угол α имеет положительное значение при подъеме и отрицательное - при спуске участка дороги. Угол β имеет положительное значение при наклоне автомобиля вправо по ходу движения. Угол γ имеет положительное значение при развороте автомобиля влево.
Акселерометр является измерителем кажущегося ускорения, т.е. он измеряет суммарную величину проекций линейного ускорения автомобиля и ускорение силы тяжести на ось чувствительности соответствующего акселерометра.
При движении автомобиля с постоянной скоростью, т.е. когда его ускорение линейного движения отсутствует, для чего двигатель автомобиля "форсируют" при подъеме и "тормозят" при спуске, акселерометр на движущемся автомобиле может быть использован в качестве датчика угла, регистрирующего уклоны дороги относительно вектора ускорения силы тяжести в точке нахождения автомобиля.
Поскольку движение автомобиля со строго постоянной скоростью затруднительно, то имеющее место фактическое линейное ускорение автомобиля должно учитываться, и при оценке продольного уклона дороги необходимо вводить поправку на неточность поддержания постоянства скорости. Для формирования этой поправки используются результаты измерений (контроля) скорости автомобиля от внешних измерителей. Такими измерителями в системе измерения дороги являются система спутниковой навигации и бортовой компьютер (ПЭВМ). Для привязки результатов измерения к полотну дороги используются показания одометра.
Устройство для осуществления способа содержит измерительно- вычислительный комплекс, включающий ПЭВМ 1 с монитором, систему спутниковой навигации контроля линейной скорости с установленными на автомобиле антенной 2 и приемником 3, датчик пройденного пути в виде одометра 4, средство для определения параметров профиля поверхности дорожного покрытия и параметров движения автомобиля в виде жестко установленного на задней балке подвески колес автомобиля инерциального блока 5, состоящего из прямоугольного корпуса 6, одна из осей симметрии которого ориентирована вдоль направления движения автомобиля, закрепленных в этом корпусе последовательно вдоль этой оси электроразъема 7, для связи с блоком питания и ПЭВМ, блока электроники 8, гироскопа 9 и блока 10 из трех ортогонально расположенных акселерометров с одним датчиком температуры (отдельно не показаны), при этом ось чувствительности первого акселерометра ориентирована вдоль указанной оси симметрии прямоугольного корпуса, второго - вдоль задней балки подвески колес автомобиля, а третьего - вдоль нормали к плоскости расположения осей чувствительности первого и второго акселерометров, так же как и ось чувствительности гироскопа. В прямоугольном корпусе имеются отверстия 11 для его жесткого крепления к задней неподрессоренной балке автомобиля.
При работе устройства первый акселерометр A1 измеряет кажущееся ускорение вдоль направления движения автомобиля, второй акселерометр A2 - в боковом (поперечном) направлении и третий акселерометр A3 - в направлении нормали к базовой плоскости автомобиля.
Для дорог с малыми углами наклона (спуска-подъема) сигнал с вертикального акселерометра A3 (при α ≅ 5o) в 20 и более раз слабее сигнала с продольного акселерометра A1. Поэтому в качестве основного измерителя углов уклона дороги используется продольный акселерометр, а вертикальный используется как регистратор ровности дороги.
Боковой акселерометр A2 измеряет угол β уклона дороги в поперечном направлении.
Угол в горизонте (азимуте) γ определяется с учетом начального угла γo как интеграл показаний датчика угловой скорости (гироскопа). При движении автомобиля с постоянной скоростью радиус кривизны дорожного покрытия в горизонтальной плоскости оценивается по показаниям гироскопа с учетом величины скорости движения автомобиля. Радиус кривизны дорожного покрытия в вертикальной плоскости оценивается по показаниям продольного акселерометра. Реально на дорогах радиус поворотов не является постоянным по своей величине. Кроме того, при разворотах с малым радиусом кривизны скорость движения автомобиля, как правило, приходится изменять, чтобы избежать заносов. В этом случае радиусы поворотов оцениваются по отдельным участкам дороги с использованием оценок скорости движения и координат автомобиля от внешней системы (одометр, система спутниковой навигации, компьютер).
Показатель ровности дороги оценивается средней интенсивностью воздействия неровностей на колесо. Поскольку блок акселерометров закреплен на неподрессоренной балке автомобиля, жестко связанной с колесами, то профиль всех неровностей, обкатываемых колесом, фиксируется вертикальным акселерометром, при этом сигнал о действующих ускорениях зависит от неровности дорожного покрытия. Изменение продольного и поперечного профилей дороги сказывается на точности оценки микропрофиля только при больших углах уклонов. Кроме того, в силу упругости колес автомобиля на точность оценки практически не влияет и шероховатость дорожного покрытия.
Фиксируемые продольным и боковым акселерометрами изменения профиля дороги имеют низкочастотный спектр с длиной волны до сотен метров.
Вертикальный акселерометр как регистратор колебаний колес из-за неровности дороги фиксирует ускорения в достаточно широкой полосе частот:
- низкочастотные от сотых до десятых долей Гц колебания, вызванные неровностями дороги в виде ложбинок и возвышений;
- колебания с более высокой частотой (от десятых долей до единиц Гц), вызванные неровностями типа "волна";
- высокочастотные колебания, вызванные всевозможными повреждениями дороги, которые в силу большой массы автомобиля не будут превышать первого десятка Гц.
В качестве критерия оценки ровности дорожного покрытия используется энергетический спектр колебаний (спектральная плотность или мощность) сигнала акселерометра A3, получаемого при использовании бортового компьютера. При этом оценивается энергия колебаний в разных диапазонах частот.
Колебания, вызванные повреждением полотна дороги, близки к ударным нагрузкам. Они проявляются в виде "всплеска" сигнала, величина которого зависит от глубины (высоты) неровности.
Частота этих "всплесков" и их уровень оценивается непосредственно путем их выделения из выходного сигнала акселерометра с последующей привязкой по координатам к дороге. При этом при хорошей подвеске кузов автомобиля практически не отвечает на такого типа неровности.
Колебания, вызванные неровностью дорожного полотна (микропрофиля), оцениваются по результатам обработки сигнала, полученного после исключения из него указанных "всплесков".
Коэффициент сцепления колес автомобиля с дорогой определяется как отношение тормозной силы к величине нагрузки колес на дорожное покрытие, действующей по нормали к поверхности дороги. При этом тормозная сила определяется как произведение массы автомобиля на измеренное акселерометром A1 ускорение, возникающее при полном торможении колес (до состояния юза).
Нагрузка на дорожное покрытие определяется как произведение массы автомобиля на ускорение силы тяжести g. При измерении коэффициента сцепления дорожное покрытие может предварительно смачиваться водой.
Проекции кажущегося ускорения W и угловой скорости ω на оси чувствительности акселерометров и гироскопов без учета погрешностей их выставки (фиг. 2) имеют вид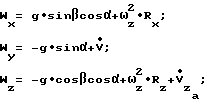

где Rx Rz - радиусы разворота автомобиля, характеризующие кривизну дорожного полотна в горизонтальной и вертикальной плоскостях;
α,β - углы уклона дорожного полотна в продольном и поперечном направлениях; - линейное ускорение движения автомобиля;
- линейное ускорение движения автомобиля; - угловая скорость разворота автомобиля в горизонтальной и вертикальной плоскостях;
- угловая скорость разворота автомобиля в горизонтальной и вертикальной плоскостях; - линейное ускорение, вызванное движением автомобиля (колес) из-за неровности дорожного покрытия в вертикальной плоскости в направлении нормали к полотну дороги.
- линейное ускорение, вызванное движением автомобиля (колес) из-за неровности дорожного покрытия в вертикальной плоскости в направлении нормали к полотну дороги.
Соотношения для угловых скоростей разворота автомобиля и его линейной скорости движения вдоль дорожного полотна имеют вид
Измеренные величины ускорений и угловой скорости выражаются в виде напряжений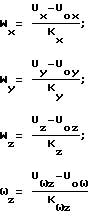
где U0 - величины нулевых сигналов акселерометров и гироскопа;
U - напряжения, снимаемые с акселерометров и гироскопа;
K - масштабные коэффициенты.
Угол уклона α в продольном направлении определяется из выражения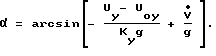
Угол поперечного уклона дороги вычисляется из выражения
Радиус кривизны дорожного покрытия определяется из выражения
Микронеровность дорожного покрытия определяется путем обработки сигнала вертикального акселерометра A3, выражение для которого имеет вид
Коэффициент сцепления определяется из соотношения
При использовании указанных выше выражений для оценки величины уклонов вводится поправка, полученная от системы спутниковой навигации контроля линейной скорости автомобиля. При этом
где j = 1,2,3...,N;
T - такт определения значения линейной скорости автомобиля (движения) с использованием спутниковой системы навигации;
V(jT), V[(j-1)T] - оценки линейной скорости движения автомобиля, полученные с дискретностью T.
 оценка линейного ускорения автомобиля на момент коррекции.
оценка линейного ускорения автомобиля на момент коррекции.
Таким образом, при использования предлагаемой группы изобретений достигнут технический результат, заключающийся в повышении точности и достоверности результатов измерений за счет упрощения определения и выбора начального базиса отсчета и существенного расширения функциональных возможностей устройства при использовании минимального количества датчиков измеряемых параметров с одновременным упрощением конструктивной схемы устройства и программного обеспечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
Изобретение относится к измерительной технике, в частности к определению профиля поверхности дорожного покрытия с помощью транспортных средств, движущихся вдоль его профиля, например, при строительстве или эксплуатации дорог. Измерение ускорения автомобиля производят в его неподрессоренной части. Дополнительно измеряют ускорение в направлении нормали к базовой плоскости автомобиля, определяемой направлением движения автомобиля вдоль дороги и поперечным ему. Положение базовой плоскости автомобиля при движении ориентируют в географической системе координат с сопровождающим трехгранником вдоль географической вертикали по касательной к меридиану на Север и вдоль касательной к параллели на Восток. Углы уклона профиля дорожного полотна в продольном и поперечном направлениях, кривизну, неровность и коэффициент сцепления дорожного покрытия определяют путем обработки сигналов о величинах ускорений и угловой скорости с учетом поправок на оценки углов уклона базовой плоскости в географической системе координат, на непостоянство скорости движения автомобиля с одновременной привязкой к профилю дороги координат точек измерения по сигналам спутниковой системы навигации и одометра. В устройстве используется система спутниковой навигации контроля линейной скорости с установленными на автомобиле антенной и приемником. Датчик пройденного пути выполнен в виде одометра. Средства для определения параметров профиля поверхности дорожного покрытия и параметров движения автомобиля выполнены в виде жестко установленного на задней балке подвески колес автомобиля инерциального блока. Блок состоит из прямоугольного корпуса, одна из осей симметрии которого ориентирована вдоль направления движения автомобиля, а также закрепленных в этом корпусе последовательно вдоль этой оси электроразъема для связи с блоком питания и ПЭВМ, блока электроники, гироскопа и блока из трех ортогонально расположенных акселерометров и датчика температуры. Ось чувствительности первого акселерометра ориентирована вдоль указанной оси симметрии прямоугольного корпуса, второго - вдоль оси задней балки подвески колес автомобиля, а оси чувствительности третьего акселерометра и гироскопа - вдоль нормали к плоскости расположения осей чувствительности первого и второго акселерометров. Обеспечиваются повышение точности и достоверности результатов измерений за счет упрощения определения и калибровки начального базиса отсчета и существенное расширение функциональных возможностей при использовании минимального количества датчиков измеряемых параметров с одновременным упрощением конструктивной схемы устройства и программного обеспечения. 2 с. и 1 з.п. ф-лы, 4 ил.