Изобретение относится к области магнитных измерений, в частности к измерениям компонент и полного вектора индукции магнитного поля Земли (МПЗ), а также к средствам калибровки магнитометров.
Широкое внедрение различных типов высокотехнологичных датчиков низкой стоимости (магниторезистивных, датчиков Холла и др.) расширяет возможности применения магнитометров в различные области техники измерений, но в то же время ограничивается возможность их применения в технике прецизионных измерений, обусловленная нелинейностью их характеристик преобразования. Обеспечение линейности характеристик технологическими и конструктивными затратами повышает стоимость магнитометров.
Известные способы повышения точности калибровки и определения нелинейности характеристик преобразования магнитометров [1] применением меры магнитной индукции или колец Гельмгольца и магнитного экрана сложны и обладают высокой стоимостью.
Известны способы повышения точности приборов определением параметров аппроксимированной градуировочной характеристики (ГХ) при компенсации нелинейности [2], осуществляемые графоаналитическим методом или методом эмпирических исследований ГХ. Данные способы требуют большого количества измерений и больших временных затрат, приводящих к их заметному усложнению, а также затрудняют автоматизацию процесса калибровки.
Показанный в работе [3] способ определения параметров ГХ магнитометра, основанный на применении метода образцовых сигналов, лишен недостатков вышеуказанных способов. Данный способ включает совмещение магниточувствительной оси (МЧО) магнитометра, помещенного в меру магнитной индукции, с направлением вектора магнитной индукции, задаваемой образцовым источником магнитного поля, последовательное воздействие на МЧО магнитометра образцового магнитного поля с различными значениями индукции при постоянном положении совмещенной МЧО с направлением вектора индукции образцового магнитного поля и осуществление соответствующих этим значениям измерений выходных сигналов магнитометра, причем количество задаваемых воздействующих величин равно степени аппроксимирующего ГХ магнитометра полинома, затем определение параметров ГХ в виде результатов решения системы уравнений, заданной в виде системы функций (результатов измерений) соответствующих значений индукции и параметров ГХ.
Недостатком указанного способа является необходимость обязательного использования уникальной конструкции дорогостоящих экранированной меры магнитной индукции или колец Гельмгольца, предполагающих наличия источника образцовых значений магнитной индукции и сложно настраиваемых катушек или колечной системы. Кроме того, неравномерность пространственного распределения формируемого магнитного поля внутри катушек магнитной меры вызывает потребность локализации ограниченных размеров рабочего объема, что создает трудности при установке и размещении в этом объеме калибруемых датчиков. Таким образом, указанные недостатки и сложность содержания и обслуживания меры магнитной индукции или колечной системы ограничивают возможности применения известного способа определения параметров ГХ магнитометра.
Известен способ определения параметров ГХ магнитометра [4], исключающий указанные недостатки, наиболее близок по технической сущности к предлагаемому и принят за прототип.
Указанный способ определения параметров ГХ магнитометра включает совмещение МЧО магнитометра с осью направления вектора индукции МПЗ известного значения его модуля, определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, формируемых последовательностью фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ на известные углы в диапазоне их значений от нуля до 180°, причем общее количество входных воздействий и соответственно преобразований их магнитометром равно степени аппроксимирующего ГХ полинома, затем определение параметров ГХ в виде результатов решения системы уравнений, заданной в виде системы функций входных воздействий и параметров ГХ магнитометра, при этом перед началом измерений совмещение МЧО магнитометра с направлением вектора индукции МПЗ осуществляется сначала приближенной (грубой) начальной установкой МЧО по направлению вектора индукции МПЗ, затем поворотами МЧО относительно ее начального положения на углы +90° и -90° в одной и той же плоскости поворота, определяются показания магнитометра при соответствующих углах поворота, при разных показаниях корректируется начальная установка, осуществление процедуры поворотов, определения показаний и по результатам показаний корректировки начального положения повторяются до полного установления равенства показаний магнитометра при поворотах на +90° и -90°, затем проведение процедур корректировки начальной установки МЧО продолжаются аналогичным образом поворотами МЧО относительно направления вектора индукции МПЗ в плоскости ее поворота, перпендикулярной первоначальной плоскости поворота, при необходимости процедуры начальной установки в разных плоскостях поворота повторяются до окончательного равенства нулю разности показаний магнитометра при углах поворота +90° и -90°.
В предлагаемом способе определение параметров ГХ осуществляется решением системы уравнений, образованной последовательными тактами преобразования воздействующих на вход магнитометра различных значений индукции магнитного поля. Эти значения являются проекцией вектора индукции МПЗ на магниточувствительную ось при соответствующем ее наклоне относительно этого вектора.
Процесс измерения индукции исследуемого магнитного поля сопровождается решением исходного уравнения, представляющего математическое выражение аппроксимированной ГХ относительно измеряемой величины после подстановки в данное уравнение найденных значений параметров в результате решения вышеуказанной системы уравнений. В данном случае можно определить параметры ГХ при ее аппроксимации полиномом любой степени.
Полезность и преимущественные особенности данного способа обусловлены возможностью использования для его осуществления сравнительно простых в изготовлении и низкой стоимости малогабаритных прецизионных поворотных устройств в сочетании с использованием в качестве образцового источника равномерно распределенной в пространственном объеме индукции МПЗ.
Недостатком данного способа является его сложность, достаточно сильно зависящая от степени аппроксимирующего ГХ полинома, обусловленная сложностью решения системы уравнений для определения параметров ГХ, а затем неизвестной входной величины индукции МПЗ.
Целью предлагаемого изобретения является упрощение способа определения параметров ГХ магнитометра.
В основе предлагаемого способа использован метод кусочно-линейной аппроксимации ГХ, обеспечивающий понижение степени аппроксимирующего выражения известного способа.
Предлагаемый способ определения параметров ГХ магнитометра включает совмещение магниточувствительной оси (МЧО) магнитометра с осью направления вектора индукции магнитного поля Земли (МПЗ) известного значения его модуля, определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, формируемых последовательностью фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ на известные углы в диапазоне их значений от нуля до 180°, при этом количество дополнительных входных воздействий и соответственно преобразований их магнитометром равно количеству участков кусочно-линейной аппроксимации градуировочной характеристики и каждое из этих воздействий формируется поворотом МЧО на угол, обеспечивающий значение входной величины в граничной точке интервалов аппроксимации оси значений магнитной индукции градуировочной характеристики, причем входные воздействия, формируемые в диапазонах углов поворота от нуля до 90° и от 90° до 180°, принадлежат граничным точкам интервалов аппроксимации соответственно оси положительных и оси отрицательных значений магнитной индукции, значения магнитной индукции, формируемые начальным положением МЧО и поворотом ее на 180°, являются крайними граничными точками градуировочной характеристики, затем определение параметров градуировочной характеристики на каждом интервале аппроксимации в виде результатов решения систем линейных уравнений, соответствующих интервалам аппроксимации, заданных в виде систем функций входных воздействий и параметров градуировочной характеристики.
На чертеже показан вариант кусочно-линейной аппроксимации ГХ магнитометра.
Математическое выражение ГХ магнитометра представим в виде кусочно-линейной аппроксимации, когда связь между выходной и входной величинами магнитометра на рассматриваемом линейном участке выражается зависимостью

где j - номер участка аппроксимации ГХ;
m - число линейных участков, которыми может быть с требуемой точностью аппроксимирована ГХ магнитометра;
N(j) - выходная величина магнитометра на j-м участке, например, формируемая в виде кодового эквивалента;
B(j) - измеряемая на j-м участке индукция магнитного поля;
a1j, a2j - определяемые параметры ГХ на j-м участке аппроксимации, являющиеся постоянными коэффициентами;
Показанный на чертеже вариант аппроксимации, описываемый выражением (1), определен для положительной и отрицательной областей значений функции N(B). В общем случае аппроксимированная ГХ может содержать m линейных участков с необязательно равными интервалами аппроксимации.
Значения индукции Bi(i=1, 2, …, c) в граничных точках интервалов аппроксимации формируются поворотами МЧО магнитометра относительно направления вектора индукции МПЗ известного значения B0, то есть

где Ki - коэффициенты преобразования индукции B0 при осуществлении поворотов МЧО.
Значение входной индукции B в каждом такте преобразования является проекцией вектора индукции МПЗ на магниточувствительную ось при соответствующем ее наклоне относительно этого вектора, следовательно

где αi - угол поворота МЧО относительно направления вектора индукции МПЗ. Значения скалярной величины B (см. фиг.1) на оси положительных значений (Bi=bi,при i=1, 2, …, c) формируются поворотом МЧО на углы в диапазоне их изменений

Соответственно диапазон изменения углов для формирования входной индукции на оси отрицательных значений (Bi=-bi при i=2, 3, …, с)
90°<αi≤180°.
Крайняя точка ГХ с координатами (bc, nc) соответствует начальному, то есть совмещенному с осью направления вектора индукции МПЗ положению МЧО. Следовательно, согласно (2) и (3)
Bc=bc=KcB0=cos0°·B0=B0.
В данном способе приемлем вариант совмещения МЧО с осью направления вектора индукции МПЗ, показанный в прототипе. Точка ГХ с координатами (b1, n1) соответствует повернутому на угол α1=90° положению МЧО относительно начального положения, то есть
B1=b1=K1B0=cos90°·B0=0.
Крайняя граничная точка (-bc) на оси отрицательных значений измеряемой величины определяется равенством
Bc=-bc=cos180°·B0=-B0.
В предлагаемом способе определение параметров ГХ, представленной выражением (1), осуществляется решением следующих линейных систем уравнений, формируемых на каждом j-м участке ГХ, образованных последовательными тактами преобразования воздействующих на вход магнитометра значений индукции в граничных точках выбранного интервала аппроксимации

Общее решение системы уравнений (5) для определения параметров на каждом j-м интервале аппроксимации с учетом (2) можно представить в следующем виде

Процесс измерения индукции исследуемого магнитного поля на j-х интервалах, определяемых граничными значениями Bi, Bi+1 (при i=j), осуществляется решением уравнения (1) относительно измеряемой величины B после подстановки в данное уравнение найденных значений параметров

или с учетом (3) и (6) имеем

Рассмотрим пример определения параметров простой ГХ магнитометра в случае ее двухинтервальной кусочно-линейной аппроксимации (m=2) для области положительных значений магнитной индукции.
В данном случае значения Bi формируются поворотом МЧО на углы в диапазоне их изменений, определяемом выражением (4), причем крайними точками ГХ на оси B являются значения B1=0 и Bc=B3=B0. Предположим, что выбор внутренней граничной точки участков аппроксимации осуществлен при значении B2=0,5B0. Следовательно, K1=0, K2=0,5, K3=1 и соответственно углами поворота МЧО являются α1=90°, α2=arccos0,5=60°, a3=0. Определим с учетом этих значений параметры ГХ для первого и второго интервалов аппроксимации с помощью выражений (6) в виде

По результатам преобразований с помощью выражения (7) после подстановки в него найденных значений параметров определяется индукция В. Определение результатов измерения можно осуществлять также с помощью выражений, полученных после подстановки, например, в уравнение (8), значений углов. В данном случае соответственно для первого и второго участков аппроксимации получим
 ,
,
 .
.
Таким образом, с помощью несложных преобразований и вычислений можно определить параметры любой ГХ и значение измеряемой индукции на каждом интервале кусочно-линейной аппроксимации. Простота и эффективность применения данного способа, характеризуемого решением простых линейных уравнений, в сочетании с возможностью применения простых калибровочных средств (поворотного устройства) определяют его полезность и преимущественные особенности.
Следовательно, предлагаемое изобретение, обладая новизной, полезностью и реализуемостью, может найти широкое применение в технике магнитных измерений.
Литература
1. Афанасьев Ю.В., Студенцов Н.В., Хорев В.Н. и др. Средства измерений параметров магнитного поля. - Л.: Энергия. Ленингр. отд-ние, 1979.
2. Акчурин Д.В., Богонин Б.В., Богонин М.Б. Применение полиномов Ньютона, Гаусса и Лагранжа при компенсации погрешности нелинейности. Ж. Датчики и системы. №12, 2002. - С.16.
3. Соборов Г.И. Разработка и исследование бортовых трехкомпонентных феррозондовых магнитометров моноблочного типа с жестко связанными осями. Диссертация на соискание ученой степени к.т.н. Московский энергетический институт (технический университет). Москва, 2003.
4. Способ определения параметров градуировочной характеристики магнитометра. Патент РФ №2386141, МПК G01R 35/00, 7 G01R 33/02, 2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ МАГНИТОМЕТРА | 2008 |
|
RU2386141C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ ФЕРРОЗОНДА ПРИ ТЕМПЕРАТУРНЫХ ИСПЫТАНИЯХ | 2018 |
|
RU2687170C1 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ХАРАКТЕРИСТИК ТРЁХКОМПОНЕНТНОГО МАГНИТОМЕТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2610932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
Способ включает совмещение магниточувствительной оси (МЧО) магнитометра с осью направления вектора индукции магнитного поля Земли (МПЗ) известного значения его модуля и определение результата преобразования этого значения магнитометром. Затем осуществляют определение результатов преобразования дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, формируемых последовательностью поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ на углы в диапазоне от нуля до 180°. Количество дополнительных воздействий и их преобразований равно количеству участков кусочно-линейной аппроксимации градуировочной характеристики. Каждое из этих воздействий формируется поворотом МЧО на угол, обеспечивающий значение входной величины в граничной точке интервалов аппроксимации оси значений магнитной индукции градуировочной характеристики. Входные воздействия, формируемые в диапазонах углов поворота от нуля до 90° и от 90° до 180° принадлежат граничным точкам интервалов аппроксимации соответственно оси положительных и отрицательных значений магнитной индукции. Затем производят определение параметров градуировочной характеристики на интервалах аппроксимации в виде результатов решения систем линейных уравнений, соответствующих интервалам аппроксимации, заданных в виде систем функций входных воздействий и параметров градуировочной характеристики. Технический результат заключается в упрощении способа определения градуировочной характеристики магнитометра. 1 ил.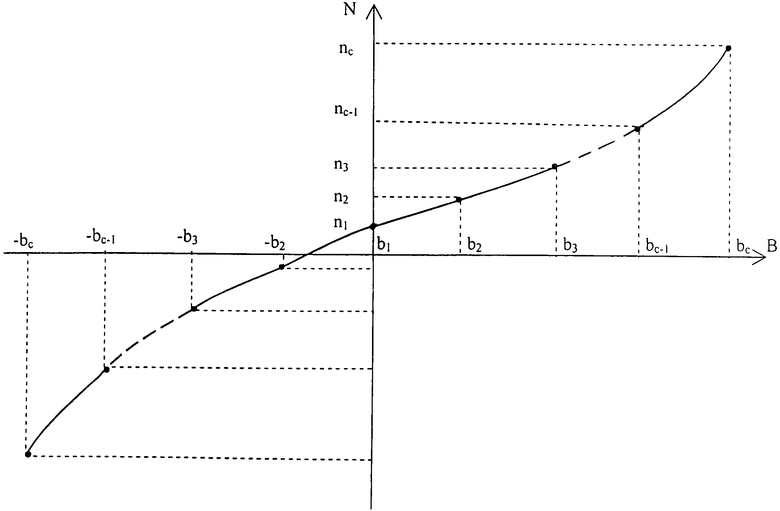
Способ определения параметров градуировочной характеристики магнитометра включает совмещение магниточувствительной оси (МЧО) магнитометра с осью направления вектора индукции магнитного поля Земли (МПЗ) известного значения его модуля, определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, формируемых последовательностью фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ на известные углы в диапазоне их значений от нуля до 180°, отличающийся тем, что количество дополнительных входных воздействий и соответственно преобразований их магнитометром равно количеству участков кусочно-линейной аппроксимации градуировочной характеристики и каждое из этих воздействий формируется поворотом МЧО на угол, обеспечивающий значение входной величины в граничной точке интервалов аппроксимации оси значений магнитной индукции градуировочной характеристики, причем входные воздействия, формируемые в диапазонах углов поворота от нуля до 90° и от 90 до 180°, принадлежат граничным точкам интервалов аппроксимации соответственно оси положительных и оси отрицательных значений магнитной индукции, значения магнитной индукции, формируемые начальным положением МЧО и поворотом ее на 180°, являются крайними граничными точками градуировочной характеристики, затем определение параметров градуировочной характеристики на каждом интервале аппроксимации в виде результатов решения систем линейных уравнений, соответствующих интервалам аппроксимации, заданных в виде систем функций входных воздействий и параметров градуировочной характеристики.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ МАГНИТОМЕТРА | 2008 |
|
RU2386141C1 |
| US 6130534 А, 10.10.2000 | |||
| US 5117375 А, 26.05.1992 | |||
| WO 9964720 А1, 16.12.1999. | |||

