Изобретение относится к области магнитных измерений, в частности к измерениям компонент и полного вектора индукции магнитного поля Земли, а также к средствам калибровки магнитометров.
Известен способ повышения точности магнитометра путем обеспечения точности калибровки, использования меры магнитной индукции, то есть точного определения параметров его статической характеристики преобразования.
Известен способ повышения точности магнитометра путем обеспечения точности его калибровки использованием меры магнитной индукции или колец Гельмгольца и магнитного экрана [1]. В процессе калибровки магнитометра определяются параметры его статической характеристики преобразования или, что то же самое, градуировочной характеристики (ГХ). По результатам измерения выходных сигналов магнитометра, магниточувствительный элемент которого помещен в магнитный экран, определяется смещение нуля характеристики преобразования. При воздействии магнитной индукции образцового магнитного поля на магниточувствительный элемент, чувствительная ось которого совмещена с направлением вектора индукции, по результатам измерения выходных сигналов магнитометра определяется коэффициент преобразования характеристики преобразования магнитометра. Целесообразность данного способа калибровки объяснима применением магнитометров с высокой линейностью характеристики преобразования. Упрощение и снижение конструктивных качеств феррозондовых датчиков приводит к ограничению точностных параметров, вызванных в значительной степени нелинейностью характеристики преобразования. Обеспечение линейности характеристики вызывает потребность повышения технологических и конструктивных затрат, что повышает стоимость магнитометров.
Широкое внедрение высокотехнологичных датчиков низкой стоимости (например, магниторезистивных, датчиков Холла и др.) расширяет возможности применения магнитометров в различные области техники измерений, в то же время ограничивается возможность их применения в технике прецизионных измерений. Снижение точности преобразования подобных датчиков в значительной мере обусловлено нелинейностью их характеристик преобразования, выявление которой невозможно известным способом калибровки. Таким образом, недостатком указанного способа определения параметров ГХ является низкая точность калибровки, снижающая в свою очередь точность измерения параметров магнитного поля.
В работе [2] предложен и показан способ повышения точности магнитометра путем коррекции его ГХ, аппроксимированной полиномом n-й степени. Позже в работе [3] показан пример практического применения данного способа в феррозондовом магнитометре малогабаритной системы контроля положения буксируемых объектов морской техники. В данном способе определение параметров ГХ осуществляется при калибровке методом эмпирических исследований математической модели характеристики преобразования, что усложняет определение параметров и затрудняет автоматизацию процесса калибровки.
Известен способ определения параметров аппроксимированной градуировочной характеристики при компенсации нелинейности [4], осуществляемый графоаналитическим методом исследования характеристики преобразования. В данном случае необходимость графического построения характеристики преобразования прибора требует большого количества измерений и больших временных затрат, приводящих к заметному усложнению способа.
Показанный в работах [5] и [2] способ определения параметров ГХ, основанный на применении метода образцовых сигналов, исключает указанные недостатки аналогов, наиболее близок по технической сущности к предлагаемому и принят за прототип.
Указанный способ включает совмещение магниточувствительной оси (МЧО) магнитометра, помещенного в меру магнитной индукции, с направлением вектора магнитной индукции, задаваемой образцовым источником магнитного поля, последовательное воздействие на магниточувствительный элемент магнитометра образцового магнитного поля с различными значениями индукции и осуществление соответствующих этим значениям измерений выходных сигналов магнитометра, причем количество задаваемых воздействующих величин равно степени аппроксимирующего градуировочную характеристику магнитометра полинома, затем определение параметров ГХ в виде результатов решения системы уравнений, заданной в виде системы функций (результатов измерений) соответствующих значений индукции и параметров ГХ.
Математическое выражение ГХ магнитометра представим в виде следующего аппроксимирующего полинома n-й степени

где N - выходная величина магнитометра, например, формируемая в виде кодового эквивалента;
В - измеряемая индукция магнитного поля, воздействующая на вход магнитометра;
a1, a2, …, an - определяемые параметры ГХ, являющиеся постоянными коэффициентами.
Предполагая достаточно точное совмещение МЧО магнитометра, помещенного в меру магнитной индукции, с направлением вектора индукции задаваемого образцового магнитного поля, процесс определения параметров ГХ представим в виде последовательности n тактов, выражения результатов измерения которых образуют следующую систему уравнений
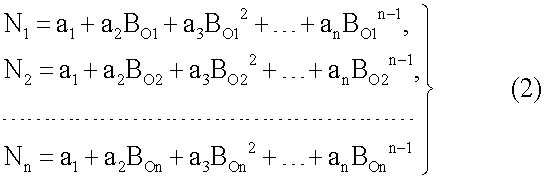
где BOi (i=1, 2, …, n) - последовательно задаваемые в каждом такте значения индукции образцового магнитного поля;
N1, N2, …, Nn - показания магнитометра в соответствующих тактах преобразования.
Параметры аi определяются решением полученной системы уравнений (2) с помощью вычислительного устройства.
В процессе измерения измеряемая индукция В исследуемого магнитного поля определяется решением уравнения (1) относительно измеряемой величины В после подстановки в данное уравнение найденных значений ai в результате решения системы уравнений (2).
Недостатками указанного способа являются необходимость обязательного использования уникальной конструкции дорогостоящих экранированной меры магнитной индукции или колец Гельмгольца, предполагающих наличия источника образцовых значений магнитной индукции и сложно настраиваемых катушек или колечной системы. Необходимость осуществления сложных регулировок и периодической аттестации этих устройств требует специального их обслуживания, а большие габаритные размеры вызывают необходимость специального помещения с большой площадью их размещения. Кроме того, неравномерность пространственного распределения формируемого магнитного поля внутри катушек магнитной меры вызывает потребность локализации ограниченных размеров рабочего объема. Для размещения калибруемых датчиков в этом объеме необходимы специальные механически перемещаемые поворотные устройства. Таким образом, уникальность и ограниченные возможности приобретения и содержания меры магнитной индукции или колечных систем значительно ограничивают возможности применения известного метода определения параметров ГХ магнитометра.
Целью предлагаемого изобретения является расширение технической возможности способа определения параметров градуировочной характеристики магнитометра, позволяющей применение простых технических средств его осуществления.
Предлагаемый способ определения параметров ГХ магнитометра включает совмещение МЧО магнитометра с осью направления опорного вектора магнитной индукции известного значения, определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, причем общее количество входных воздействий и соответственно преобразований их магнитометром равно степени аппроксимирующего ГХ полинома, затем определение параметров ГХ в виде результатов решения системы уравнений, заданной в виде системы функций входных воздействий и параметров ГХ магнитометра, при этом в качестве опорного вектора магнитной индукции выбран вектор индукции магнитного поля Земли (МПЗ), а формирование последовательности входных воздействий образцового поля осуществляется последовательностью фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ вокруг начала этой оси в плоскости поворота, проходящей через эту ось, при этом повороты осуществляются на углы с разными значениями их модулей в диапазоне изменения модулей, не превышающего 180°, перед началом измерений совмещение МЧО магнитометра с направлением вектора индукции МПЗ осуществляется сначала приближенной (грубой) начальной установкой МЧО по направлению вектора индукции МПЗ, затем поворотами МЧО относительно ее начального положения на углы +90° и -90° в одной и той же плоскости поворота, определяются показания магнитометра при соответствующих углах поворота, при разных показаниях корректируется начальная установка, процедуры поворотов, определения показаний и по результатам показаний корректировки начального положения повторяются до полного установления равенства показаний магнитометра при поворотах на +90° и -90°, затем проведение процедур корректировки начальной установки МЧО продолжаются аналогичным образом поворотами МЧО относительно направления вектора индукции МПЗ в плоскости ее поворота, перпендикулярной первоначальной плоскости поворота, при необходимости процедуры начальной установки в разных плоскостях поворота повторяются до окончательного равенства нулю разности показаний магнитометра при углах поворота +90° и -90°.
В предлагаемом способе определение параметров ГХ, представленной выражением (1), осуществляется решением следующей системы уравнений, образованной последовательными тактами преобразования воздействующих на вход магнитометра различных значений индукции магнитного поля
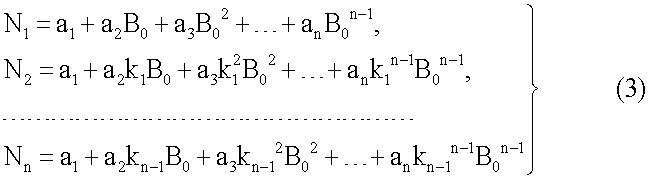
где В0 - значение индукции вектора МПЗ, предварительно измеренное прецизионным магнитометром;
N1, N2, …, Nn - показания магнитометра в соответствующих тактах преобразования;
a1, a2, …, аn - параметры градуировочной характеристики;
k1, k2, …, kn-1 - коэффициенты преобразования индукции (В0) МПЗ при осуществлении поворотов МЧО.
В данном случае воздействующее на магнитометр значение индукции в каждом такте преобразования является проекцией вектора индукции МПЗ на магниточувствительную ось при соответствующем ее наклоне относительно этого вектора, то есть

где αi - угол поворота МЧО относительно вектора индукции МПЗ.
Процесс измерения индукции В исследуемого магнитного поля сопровождается решением уравнения (1) относительно измеряемой величины В после подстановки в данное уравнение найденных значений параметров αi в результате решения системы уравнений (3).
Следует отметить, что параметр a1 можно считать уже определенным при ki=cos±90°=0 после осуществления начальной выставки МЧО.
Для формирования системы независимых уравнений (3) в каждом i-ом такте преобразования необходима реализация разных значений коэффициентов ki. Учитывая четность косинусной функции в выражении (4), необходимым условием формирования разных коэффициентов является неравенство модулей углов поворота в диапазоне изменения модулей, не превышающем 180°.
Рассмотрим примеры решений простых ГХ.
В случае линейной ГХ магнитометра имеем систему двух уравнений с двумя неизвестными a1, a2
решения которой определяются выражениями
При α1=90° (k=0) имеем a1=N2,  .
.
При квадратичной ГХ имеем систему трех уравнений с тремя неизвестными
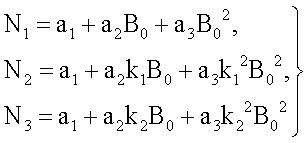
решения данной системы при α1=90° (k=0), α2=180° (k=-1) имеют следующий вид
a1=N2,
Таким образом можно определить параметры ГХ при ее аппроксимации полиномом любой степени n. Точность определения параметров ГХ данным способом зависит от точности измерения значения индукции В0 вектора МПЗ, точности задания углов поворота и точности совмещения МЧО с направлением вектора индукции МПЗ (начальной выставки МЧО). Измерение В0 легко осуществимо, например, протонным или квантовым прецизионным измерителем модуля магнитной индукции. Реально достижимой точностью осуществления поворотов практически реализуемыми поворотными средствами является величина, не превышающая одной угловой минуты, что заметно выше необходимой для данного способа точности осуществления поворотов. Достаточно простой и удобной конструкцией поворотного средства является, например, карданное поворотное устройство с тремя степенями свободы.
Простота изготовления, сравнительно низкая стоимость, простота контроля и периодической аттестации, сравнительно малые габариты и вес, обеспечивающие возможность переноса и размещения в различных местах рабочего помещения, характеризуемых отсутствием магнитных помех, а также малая площадь размещения определяют преимущественные особенности и доступность изготовления или приобретения применяемого в предлагаемом способе поворотного средства по сравнению с мерой магнитной индукции, применяемой в способе-прототипе.
Немаловажным преимущественным достоинством предлагаемого способа является возможность использования равномерно распределенной в пространственном объеме индукции МПЗ, используемой при проведении измерительных процедур.
Следовательно, предлагаемое изобретение, обладая новизной, полезностью и реализуемостью, может найти широкое применение в технике магнитных измерений.
Литература
1. Афанасьев Ю.В., Студенцов Н.В., Хорев В.Н. и др. Средства измерений параметров магнитного поля. - Л.: Энергия. Ленингр. отд-ние, 1979.
2. Соборов Г.И. Разработка и исследование бортовых трехкомпонентных феррозондовых магнитометров моноблочного типа с жестко связанными осями. Диссертация на соискание ученой степени к.т.н. Московский энергетический институт (технический университет). Москва 2003.
3. Андреев М.Я., Гаспаров П.М., Геркус А.А. и др. Малогабаритная система контроля положения буксируемых объектов морской техники. Ж. Датчики и системы № 5, 2006.
4. Акчурин Д.В., Богонин Б.В., Богонин М.Б. Применение полиномов Ньютона, Гаусса и Лагранжа при компенсации погрешности нелинейности. Ж. Датчики и системы № 12, 2002. - С.16.
5. Бромберг Э.М., Куликовский К.Л. Тестовые методы повышения точности измерений. - М.: Энергия, 1978. - С.20-22.
Предложенное изобретение относится к области магнитных измерений, в частности к измерениям компонент и полного вектора индукции магнитного поля Земли, а также к средствам калибровки магнитометров. Данное изобретение направлено на расширение технической возможности процедуры определения параметров градуировочной характеристики магнитометра, позволяющей применение простых технических средств. Предложенный способ определения параметров градуировочной характеристики магнитометра включает совмещение магниточувствительной оси (МЧО) магнитометра с осью направления индукции магнитного поля Земли (МПЗ), определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, формируемых за счет фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ в плоскости поворота, проходящей через эту ось, причем перед началом измерений совмещение МЧО магнитометра с направлением вектора индукции МПЗ осуществляется сначала грубой начальной установкой МЧО по направлению вектора индукции МПЗ, затем поворотами МЧО относительно ее начального положения на углы +90° и -90° в одной и той же плоскости поворота, определяются показания магнитометра при соответствующих углах поворота, при разных показаниях корректируется начальная установка, процедуры поворотов, определения показаний.
Способ определения параметров градуировочной характеристики магнитометра включает совмещение магниточувствительной оси (МЧО) магнитометра с осью направления опорного вектора магнитной индукции известного значения, определение результата преобразования этого значения магнитометром, а затем определение результатов преобразования последовательности дополнительных воздействующих на вход магнитометра образцовых значений магнитной индукции, причем общее количество входных воздействий и соответственно преобразований их магнитометром равно степени аппроксимирующего градуировочную характеристику полинома, затем определение параметров градуировочной характеристики в виде результатов решения системы уравнений, заданной в виде системы функций входных воздействий и параметров градуировочной характеристики магнитометра, отличающийся тем, что в качестве опорного вектора магнитной индукции выбран вектор индукции магнитного поля Земли (МПЗ), а формирование последовательности дополнительных входных воздействий образцового поля осуществляется последовательностью фиксированных поворотов МЧО магнитометра относительно оси направления вектора индукции МПЗ в плоскости поворота, проходящей через эту ось, при этом повороты осуществляются на углы с разными значениями их модулей в диапазоне изменения модулей, не превышающего 180°, причем перед началом измерений совмещение МЧО магнитометра с направлением вектора индукции МПЗ осуществляется сначала приближенной (грубой) начальной установкой МЧО по направлению вектора индукции МПЗ, затем поворотами МЧО относительно ее начального положения на углы +90° и -90° в одной и той же плоскости поворота, определяются показания магнитометра при соответствующих углах поворота, при разных показаниях корректируется начальная установка, процедуры поворотов, определения показаний, и по результатам показаний корректировки начального положения повторяются до полного установления равенства показаний магнитометра при поворотах на +90° и -90°, затем проведение процедур корректировки начальной установки МЧО продолжаются аналогичным образом поворотами МЧО относительно направления вектора индукции МПЗ в плоскости ее поворота, перпендикулярной первоначальной плоскости поворота, при необходимости процедуры начальной установки в разных плоскостях поворота повторяются до окончательного равенства нулю разности показаний магнитометра при углах поворота +90° и -90°.
| СОБОРОВ Г.И | |||
| Разработка и исследование бортовых трехкомпонентных феррозондовых магнитометров моноблочного типа с жестко связанными осями | |||
| Диссертация на соискание ученой степени к.т.н | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 6966211 В2, 22.11.2005 | |||
| WO 9964720 A1, 16.12.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩЕЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2002 |
|
RU2229727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| US 6130534 A, 10.10.2000. | |||

