Изобретение относится главным образом к роторным механизмам, а конкретнее к способам и устройствам для контроля роторных механизмов.
Некоторые известные скважины, такие как нефтяные скважины, создают путем бурения ствола скважины в естественном пласте под поверхностью Земли. Такие пласты можно найти под наземными поверхностями и/или подводными поверхностями. В некоторых известных способах бурения использовано силовое вращающееся оборудование для индуцирования вращающего момента в бурильной трубе, которая вследствие этого вращает буровое долото. Вращательное буровое долото сверлит вглубь пласта и создает выбуренную породу в пласте с образованием пробуренной скважины, при циркуляции внутри скважины соответствующих флюидов, которые облегчают транспортировку выбуренной породы к поверхности. Бурильную трубу опускают и поднимают в бурильной скважине с помощью вспомогательного троса, тянущегося от барабана буровой лебедки. Вращаясь, барабан буровой лебедки вытягивает и втягивает трос, вызывая, соответственно, подъем и опускание буровой трубы. Предварительно заданная скорость и количество движений бурового долота в буровой скважине зависит от количества переменных, которые включают в себя, без ограничений, твердость породы, подвергаемой бурению, и/или необходимость извлечения буровой трубы из скважины для замены бурового долота. Облегчения буровых работ можно добиться, по меньшей мере, частично, путем определения глубины нахождения бурового долота в скважине. Требуемой глубины нахождения бурового долота обычно достигают путем регулирования длины бурильной трубы, введенной в буровую скважину, а также скорости и направления движения бурильной трубы.
Для облегчения определения такой глубины нахождения бурового долота, некоторые известные буровые снаряды включают в себя устройства для измерения бурового долота, включающие в себя датчики положения, которые измеряют вращение барабана буровой лебедки. Датчики положения передают данные на систему контроля, которая согласовывает вращение барабана буровой лебедки с глубиной бурильной трубы. Однако, поскольку для некоторых известных из уровня техники датчиков положения требуется внешний источник питания для подачи электроэнергии на уровне выше 0,25 ватт и постоянного тока с напряжением выше 24 вольт, такие датчики положения не могут быть пригодными для использования в областях, где может существовать воспламеняющаяся окружающая среда.
Сущность изобретения
Согласно одному аспекту изобретения, предусмотрен способ определения количества перемещений вращающегося компонента, который включает в себя ось ротора. Способ включает в себя обеспечение автономного магнитно-механического датчика положения, который включает в себя, по меньшей мере, один ротор датчика, который выходит наружу из герметизированного корпуса, например, между ротором и корпусом образован зазор. Способ также включает в себя вращательное соединение датчика положения с валом ротора. Способ дополнительно включает в себя определение местоположения первой позиции ротора датчика положения и определение первого линейного местоположения вала ротора, исходя из ротора датчика положения. Способ также включает в себя поворот вала ротора до второй позиции и определение направления вращения и определение местоположения второй позиции вала ротора, с использованием датчика положения.
Согласно другому аспекту изобретения, предусмотрен датчик положения, предназначенный для использования вместе с роторным механизмом, включающий в себя, по меньшей мере, один подвижный элемент. Датчик положения включает в себя, по меньшей мере, один чувствительный элемент (датчик), сконфигурированный таким образом, что он запускается посредством магнитного потока. Датчик положения сконфигурирован таким образом, что он рассеивает электрические сигналы с амплитудой мощности, которая составляет менее приблизительно одного микроватта.
Согласно дополнительному аспекту изобретения, предусмотрена измерительная система для буровой компоновки, включающей в себя, по меньшей мере, один вращательный элемент. Система включает в себя датчик положения, включающий в себя, по меньшей мере, один чувствительный элемент (датчик), сконфигурированный таким образом, что он запускается посредством магнитного потока. Датчик положения сконфигурирован таким образом, что он рассеивает электрические сигналы с амплитудой мощности, которая составляет менее приблизительно одной трети микроватта. Система также включает в себя, по меньшей мере, один процессор, связанный электронной связью с датчиком положения посредством, по меньшей мере, одного входного канала. По меньшей мере, один процессор сконфигурирован таким образом, что он принимает и обрабатывает, по меньшей мере, один выходной сигнал датчика положения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой схематический вид примерной установки для бурения скважин;
Фиг.2 представляет собой схематический вид примерного датчика положения, который можно использовать вместе с буровой установкой, показанной на Фиг.1;
Фиг.3 представляет собой вид сбоку датчика положения, показанного на Фиг.2;
Фиг.4 представляет собой электрическую схему примерной системы определения местоположения бурильной трубы, которую можно использовать вместе с буровой установкой, показанной на Фиг.1; и
Фиг.5 представляет собой примерное графическое представление форм сигнала, которые можно получать, используя датчик положения, показанный на Фиг.2.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
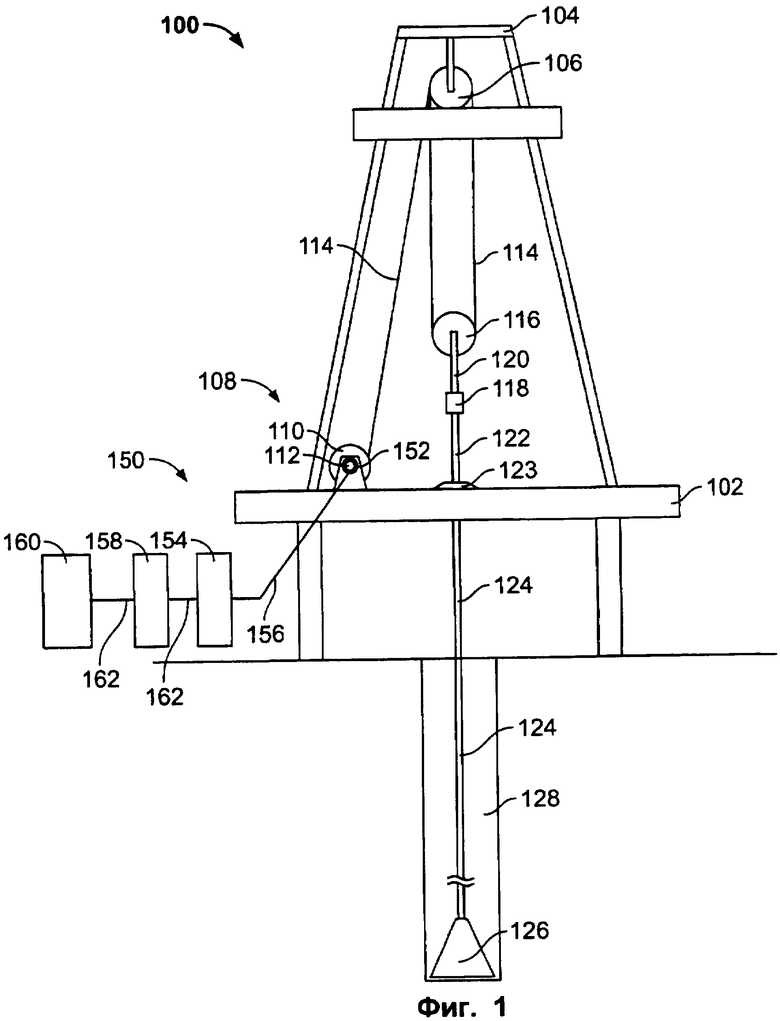
Фиг.1 представляет собой схематический вид примерной установки 100 для бурения скважин. В примерном варианте реализации, буровая установка 100 является установкой 100 для роторного бурения с наземным приводом. В качестве альтернативы, установка 100 может представлять собой любое буровое устройство, к которому можно отнести изобретение, описываемое в данном документе. Установка 100 включает в себя платформу 102, на которой закреплена несущая конструкция, или буровая вышка 104. С буровой вышки 104 свешивается кронблок 106. Установка 100 также включает в себя буровую лебедку 108, которая включает в себя барабан 110, который снабжен источником питания (не показан на Фиг.1), который может включать в себя приводной электродвигатель, но не быть ограниченным только им. В качестве альтернативы, источник питания может представлять собой любое устройство, которое дает возможность устройству 100 функционировать, как описано в данном документе. В особенности, в примерном варианте реализации изобретения, источник питания соединен с ведущим валом 112 буровой лебедки, который вращательно связан с барабаном 110.
Трос 114 намотан вокруг барабана 110 и тянется от барабана 110 до кронблока 106. Трос 114 связан с кронблоком 106, способом, аналогичным шкивной системе, которая содействует достижению заданного передаточного отношения, таким образом, способствуя переносу талевого блока 116 кронблоком 106. Талевой блок 116 поддерживает устройство 118 привода ротора через элемент 120 подвески. В примерном варианте осуществления, элемент 120 может включать в себя крюковую подвеску и вертлюжное соединение, но не быть ограниченным ими. В качестве альтернативы, элемент 120 представляет собой любое устройство, которое дает возможность установке 100 функционировать, как описано в данном документе. Устройство 118 снабжено источником питания (не показанным на Фиг.1). Например, в примерном варианте реализации, устройство 118 представляет собой верхний привод 118 с приводом от электродвигателя.
Верхний привод 118 вращательно связан с ведущей бурильной трубой 122. В примерном варианте осуществления, ведущая бурильная труба 122 представляет собой квадратный или шестиугольный элемент, но не ограничивается им. В качестве альтернативы, ведущая бурильная труба 122 может иметь любую конфигурацию, которая дает возможность установке 100 функционировать, как описано в данном документе. Ведущая бурильная труба 122 вращательно связана с бурильной трубой 124 и сконфигурирована таким образом, чтобы передавать вращающий момент от верхнего привода 118 к бурильной трубе 124. Направляющий элемент 123 облегчает радиальный перенос ведущей бурильной трубы 122. Бурильная труба 124 вращательно связана, по меньшей мере, с одним буровым долотом 126, используемым для создания буровой скважины 128. Альтернативные варианты реализации буровой установки 100 могут включать в себя шарнирное соединение вместо верхнего привода 118 и квадратную или шестиугольную втулку с механическим приводом вместо направляющего элемента 123.
Установка 100 также включает в себя систему 150 определения местоположения бурильной трубы, которая включает в себя, по меньшей мере, один датчик 152 положения, который вращательно связан с ведущим валом 112 и который электрически соединен с устройством 154 сопряжения через кабель 156 датчика положения. В примерном варианте осуществления, кабель 156 датчика положения представляет собой изолированный и экранированный медный кабель, а устройство 154 представляет собой устройство 154 сопряжения безопасной области (SAI), которое серийно выпускается компанией Дженерал Электрик Энерджи, Твинсбург, Огайо. Устройство 154 сопряжения расположено на расстоянии от платформы 102 в среде, что облегчает помещение в него нескольких электронных устройств (не показанных на Фиг.1), включенных в устройство 154. Устройство 154 позиционирования, предназначенное для дистанционного обнаружения пласта на предварительно заданном расстоянии от платформы 102, также способствует уменьшению потенциала для создания случайного электрического дугообразования в непосредственной близости от скважины 128. Устройство 154 сопряжения электрически соединено с узлом 158 обработки данных, который соединен с терминалом 160 операторского интерфейса (OIT) через множество электронных кабелей 162. В примерном варианте осуществления, электронные кабели 162 представляют собой кабели с последовательной шиной и/или универсальной последовательной шиной (USB). Также, в примерном варианте осуществления, узел 158 и OIT 160 соединены, как в портативном дорожном компьютере. В качестве альтернативы, узел 158 и OIT 160 представляют собой отдельные блоки.
Как устройство 154, так и узел 158 обработки данных, включают в себя, по меньшей мере, один процессор и память (не показаны на Фиг.1). Для целей настоящего описания, термин «компьютер» не ограничен только теми интегральными схемами, которые согласно уровню техники относятся к компьютеру, а в широком смысле относится к процессору, микроконтроллеру, микрокомпьютеру, программируемому логическому контроллеру (PLC, ПЛК), к специализированной интегральной микросхеме и другим программируемым схемам, и в данном документе эти термины используются равнозначно. В примерном варианте осуществления, память может включать в себя считываемую компьютером среду, такую как оперативное запоминающее устройство (ОЗУ, RAM), но не быть ограниченной им. В качестве альтернативы, также можно использовать гибкий диск, компакт-диск - постоянное запоминающее устройство (compact-disk - read only memory (CD-ROM)), магнитооптический диск (MOD) и/или цифровой универсальный диск (digital versatile disc (DVD)). Также, в примерном варианте осуществления, дополнительные входные каналы можно соединить с периферийным оборудованием компьютера, связанным с OIT 160, например, с мышью и/или клавиатурой, но не ограничиваясь ими. В качестве альтернативы, можно использовать другое компьютерное периферийное оборудование, включающее в себя, например, сканер. Кроме того, в примерном варианте осуществления, дополнительные выходные каналы можно связать с дополнительными информационными дисплеями, принтерами, плоттерами и/или механизмами оперативного регулирования.
Процессоры для устройства 154 сопряжения и узла 158 обрабатывают информацию, включая сигналы, полученные с датчика 152 положения и устройства 154. RAM-устройства сохраняют и передают на процессор информацию и инструкции, подлежащие исполнению. RAM-устройства также можно использовать для хранения и обеспечения временных переменных, статической (т.е. не изменяющейся) информации и инструкций, и/или другой промежуточной информации для процессоров в ходе исполнения инструкций процессорами. Инструкции, которые можно исполнять, включают в себя (но не ограничены) резидентные конверсионные алгоритмы, алгоритмы калибровки и/или сравнения. Выполнение последовательности инструкций не ограничено какой-либо конкретной комбинацией инструкций, связанных с аппаратной логикой, или программных инструкций.
В ходе эксплуатации установки 100, бурильную трубу 124 и буровое долото 126 подвешивают в скважине 128. Верхний привод 118 передает вращающий момент и вращательное движение ведущей бурильной трубе 122, которая передает вращающий момент и вращательное движение бурильной трубе 124 и буровому долоту 126. На буровое долото также действует сила, направленная вниз, вызванная весом компонентов, расположенных выше долота 126, и эта сила облегчает проникновение в пласт, подвергаемый бурению. Талевый блок 116 устанавливают с помощью нескольких петель троса 114, связывающего талевый блок 116 и кронблок 106. Для регулирования силы тяжести, вызванной буровым долотом 126, барабан 110 буровой лебедки вращают для втягивания или вытягивания части троса 114. Втягивание и вытягивание троса 114 вызывает перемещение блока 116 вверх или вниз таким образом, что направленная вниз сила, действующая на буровое долото 126, впоследствии понижается или повышается. Подповерхностные выбуренные породы (не показаны на Фиг.1), высвобожденные под действием бурового долота 126, транспортируются к поверхности за счет циркуляции флюидов по буровому долоту 126 и удаляются через подсистему удаления материала (не показана на Фиг.1). Поскольку из скважины 128 удаляется материал и глубина скважины 128 увеличивается, бурильная труба 124 погружается в скважину 128, позволяя буровому долоту 126 бурить глубже. В частности, поскольку бурильная труба 124 погружается, барабан 110 вращается, вызывая вытягивание части троса 114. Вытягиваемую длину части троса 114 можно соотносить с глубиной нахождения бурильной трубы 124 и с числом оборотов барабана 110. Иногда, поскольку глубина скважины 128 увеличивается, возникает необходимость в добавлении к буровой установке 100 дополнительных секций бурильной трубы 124.
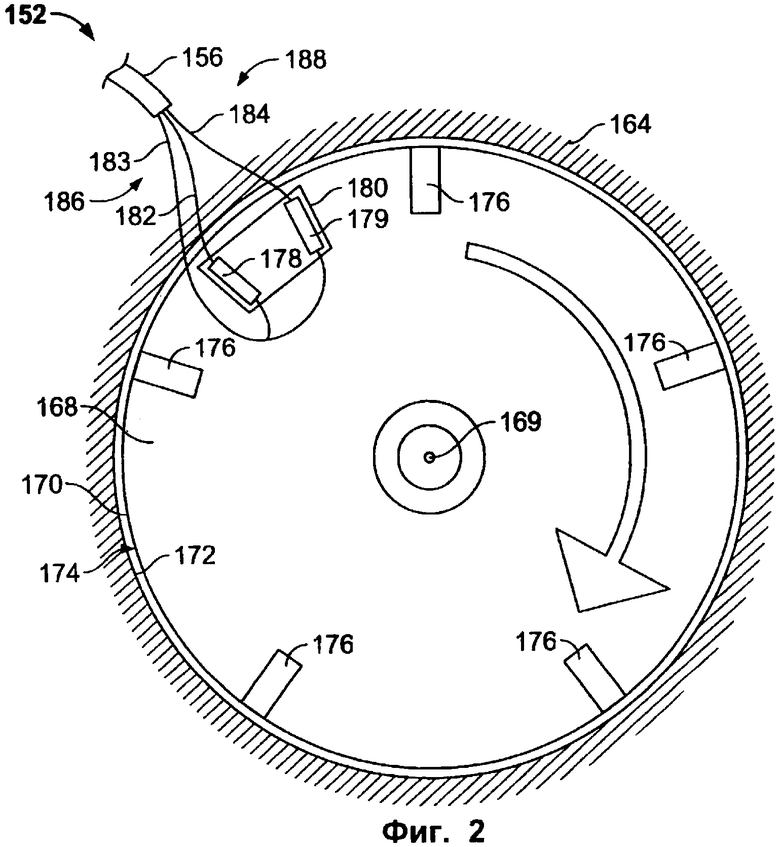
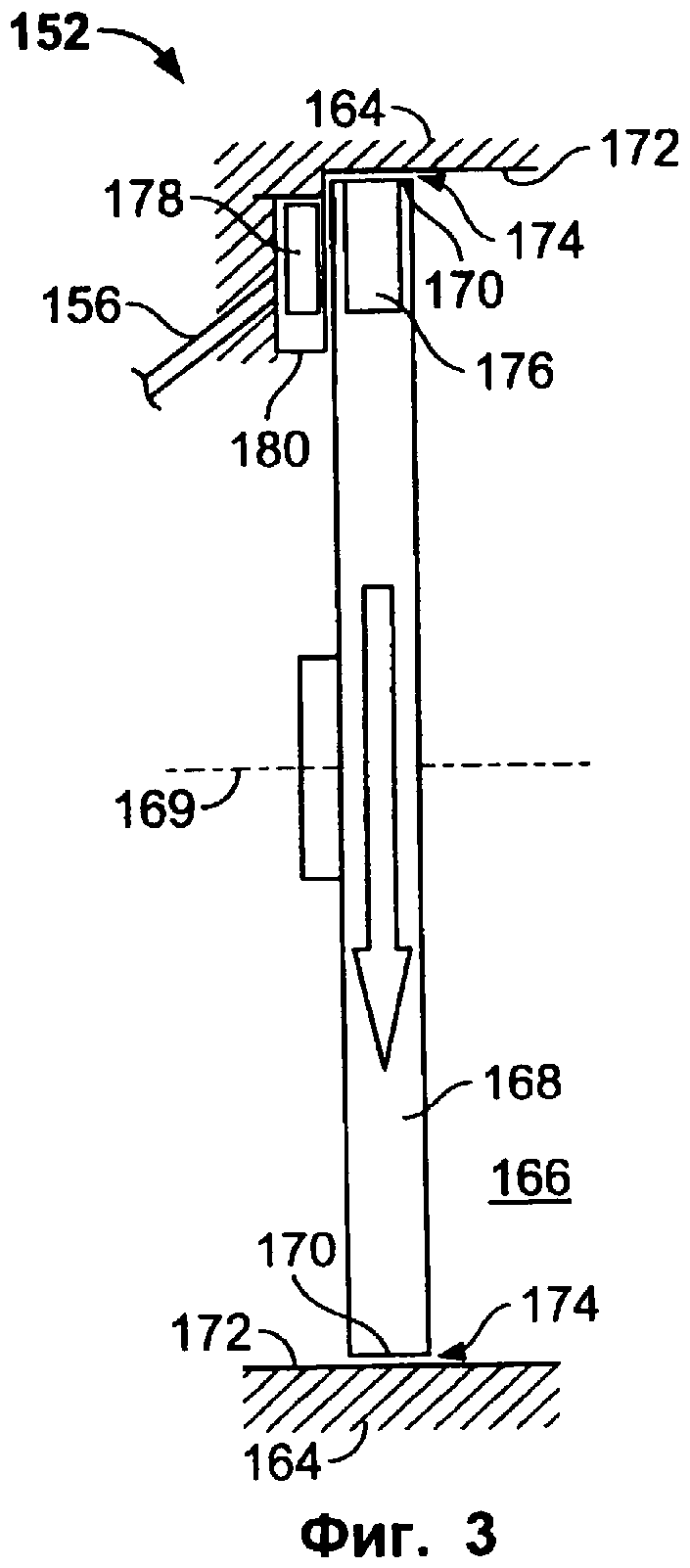
Фиг.2 представляет собой схематический вид примерного датчика 152 положения, который можно использовать в установке 100 для бурения скважин (показан на Фиг.1). Фиг.3 представляет собой вид сбоку датчика 152 положения. Датчик 152 положения включает в себя корпус 164, который определяет внутреннюю полость датчика положения. Корпус 164 изолирует полость 166 от внешней среды датчика 152 положения и способствует его защите от пыли и воды.
Датчик 152 положения также включает в себя ротор 168, который вращательно связан с ведущим валом 112 буровой лебедки (показан на Фиг.1). Ротор 168 проходит сквозь корпус 164 через уплотнительный узел (не показан), что облегчает ослабление взаимодействия между внешней средой и полостью 166. Ротор 168 вращается вокруг оси вращения 169. Корпус 164 и ротор 168 установлены таким образом, что самая внешняя по радиусу поверхность 170 ротора 168 и самая внутренняя по радиусу поверхность 172 корпуса 164 образуют зазор 174, который способствует предотвращению контакта между ротором 168 и корпусом 164 в ходе эксплуатации датчика 152 положения.
Датчик 152 положения также включает в себя несколько постоянных магнитов 176, которые ориентированы в основном радиально внутри ротора 168 таким образом, что самая внешняя по радиусу часть каждого магнита 176 по существу находится на одном уровне с поверхностью 170 ротора. В ходе вращения ротора 168, магниты 176 генерируют магнитный поток с предварительно заданной напряженностью магнитного поля и ориентацией. В примерном варианте осуществления, пять магнитов 176 расположены по существу вдоль окружности на равном расстоянии друг от друга. В качестве альтернативы, можно использовать любое количество магнитов 176 с любым расстоянием вдоль окружности между ними, что дает возможность датчику 152 положения функционировать, как описано в данном документе. Один магнитный цикл задан, как вращательное движение ротора 168 от первого 176 магнита до следующего 176 магнита, расположенного по соседству с ним на окружности.
Датчик 152 положения дополнительно включает в себя два магнитных герконовых переключателя 178 и 179 (герконы), которые надежно соединены с опорой 180 переключателя, прикрепленных к корпусу 164. В примерном варианте осуществления, герконы 178 и 179 установлены под углом 18° друг к другу для облегчения эксплуатации датчика 152 положения. В качестве альтернативы, переключатели 178 и 179 можно устанавливать по дуге окружности под любым углом в градусах, что дает возможность датчику 152 положения функционировать, как описано в данном документе. Каждый из переключателей (герконов) 178 и 179 обладает предварительно заданной чувствительностью, выбранной для значительного согласования с магнитным потоком магнитов 176. В примерном варианте осуществления, переключатели 178 и 179 разнесены по дуге окружности на расстояние, которое приблизительно эквивалентно четверти магнитного цикла и, по меньшей мере, частично задает соотношение между первым магнитным импульсом и вторым магнитным импульсом, поскольку магниты 176 вращают упомянутые переключатели 178 и 179. Более того, в примерном варианте осуществления, пять магнитов 176 и два переключателя (геркона) 178 и 179 способствуют достижению предварительно заданного решения проблемы перемещения бурильной трубы 124. Пара общих электропроводников 182 и 184 электрически соединены, соответственно, с переключателями (герконами) 178 и 179. Электропроводники 182 и 184 электрически соединены с источником электропитания (не показан на Фиг.2 и 3), установленным в устройстве 154 сопряжения (показано на Фиг.1). Более того, общий кабелепровод 183 заземления электрически соединен с переключателями (герконами) 178 и 179 на их концах, которые расположены напротив контактов электропроводников 182 и 184. Электропроводники 182, 183 и 184 помещены в кабель 156 датчика положения. В примерном варианте осуществления, электропроводники 182, 183 и 184 представляют собой медные проволоки. В качестве альтернативы, электропроводники 182, 183 и 184 могут представлять собой любые электропроводящие устройства, которые дают возможность системе 150 функционировать, как описано в данном документе. Электропроводник 183, переключатель (геркон) 178 и электропроводник 182, по меньшей мере, частично образуют первый 186 канал датчика положения, а электропроводник 183, переключатель (геркон) 179 и электропроводник 184, по меньшей мере, частично образуют второй 188 канал датчика положения.
Датчик 152 положения обеспечивает надежность системы 150 и, следовательно, буровой установки 100, из-за относительно небольшого количества движущихся частей системы 150, подвергнутой условиям эксплуатации, уменьшенных и полностью помещающихся в датчик 152 положения. В частности, только в роторе 168 и переключателях (герконах) 178 и 179 использовано функциональное движение, влияющее на кпд датчика 152 положения, как описано в данном документе. В случае отказа, датчик 152 положения можно легко и быстро заменить при минимизации прерывания буровых работ. Более того, датчик 152 положения может иметь такой размер, что с валом 112 могут быть соединены дополнительные датчики 152 положения, и/или потребность в хранении сменных датчиков 152 положения может быть снижена.
В процессе эксплуатации, барабан 110 буровой лебедки (показан на Фиг.1) вбирает в себя или удлиняет трос 114 (показанный на Фиг.1) в зависимости от глубины погружения бурильной трубы в скважину 128 (показанную на Фиг.1). Поскольку барабан 110 вращается за счет ведущего вала 112 буровой лебедки, ротор 168 датчика положения вращается в том же направлении. Например, поскольку ротор 168 вращается по часовой стрелке (как иллюстрировано стрелкой), магнит 176 последовательно приближает переключатель (геркон) 178, вращается за счет него и отступает от него. Магнит 176 генерирует магнитный поток с предварительно заданной напряженностью магнитного поля и ориентацией, так что, поскольку каждый магнит 176 приближает переключатель (геркон) 178, при предварительно заданном расстоянии вдоль окружности от переключателя (геркона) 178, в ходе приближения, геркон 178 подходит вплотную. При приближении, геркон 178 завершает создание электрической схемы в первом 186 канале, так что электрический сигнал можно посредством электропроводника 182 канализировать от устройства 154 через геркон 178, и назад к устройству 154 посредством электропроводника 183. Геркон 178 остается рядом с магнитом 176 до того, как он удалится на предварительно заданное расстояние по окружности от геркона 178. Магниты 176, устройство 154 и компоненты второго канала 188, включая геркон 179, электропроводник 183 и электропроводник 184 функционируют вместе совершенно аналогично. Действие каждого из магнитов 176, приближающих переключатель (геркон) 178, образует первый фронт отрицательного магнитного импульса, а действие каждого из магнитов 176, приближающих переключатель (геркон) 179, образует второй фронт отрицательного магнитного импульса. Данное действие и последующие действия, связанные с взаимодействием каждого из магнитов 176 и герконов 178 и 179, дополнительно обсуждаются ниже.
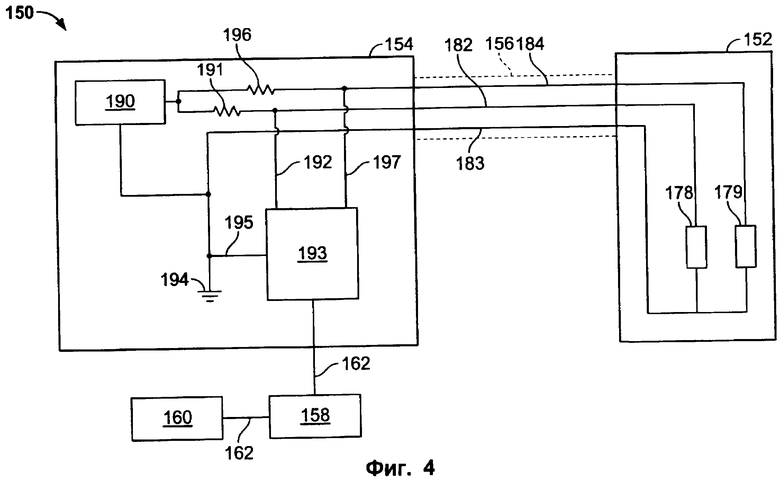
Фиг.4 представляет собой электрическую схему примерной системы 150 определения местоположения бурильной трубы, которую можно использовать вместе с буровой установкой 100 (показанной на Фиг.1). Система 150 включает в себя, по меньшей мере, один датчик 152 положения, который электрически связан с устройством 154 сопряжения через кабель 156 датчика положения. Устройство 154 сопряжения электрически связано с узлом 158 обработки данных, который связан с терминалом 160 операторского интерфейса (OIT) посредством нескольких электронных кабелей 162. Датчик 152 положения включает в себя два переключателя (геркона) 178 и 179. Общие электропроводники 182 и 184 электрически соединены, соответственно, с герконами 178 и 179. Более того, общий кабелепровод 183 заземления электрически соединен с герконами 178 и 179 на концах герконов 178 и 179, которые расположены напротив контактов проводников 182 и 184. Проводники 182, 183 и 184 помещены в кабель 156 датчика положения.
Проводник 183, геркон 178 и проводник 182, по меньшей мере, частично, образуют первый 186 канал датчика положения. Канал 186 дополнительно включает в себя источник 190 электропитания постоянного тока с напряжением 5 вольт (VDC). Канал 186 также включает в себя токоограничивающий резистор 191 с сопротивлением 25000 Ом, электрически связанный с источником 190 электропитания и с сигнальным 192 проводником источника питания, электрически связанным с проводником 182, направленным вниз от резистора 191. Канал 186 дополнительно включает в себя процессор 193, электрически связанный с проводником 192. Канал 186 также включает в себя электрически заземляющее устройство 194, электрически связанное с проводником 183, источник 190 питания и кабелепровод 195 заземления, электрически связанный с процессором 193. Проводник 195 также электрически связан с проводником 183, направленным верх от заземляющего устройства 194. Резистор 191, проводник 192, процессор 193, заземляющее устройство 194 и кабелепровод 195 заземления расположены в устройстве 154 сопряжения. Поэтому, первый канал 186 образован источником 190 питания, резистором 191, проводником 182, проводником 192, переключателем (герконом) 178, проводником 183, заземляющим устройством 194, проводником 195 и процессором 193. Процессор 193 связан с узлом 158 через проводник 162, образуя электронную систему обмена данными.
Аналогично, проводник 183, переключатель (геркон) 179 и проводник 184, по меньшей мере, частично образуют второй канал 188 датчика положения. Канал 188 дополнительно включает в себя источник 190 электропитания, токоограничивающий резистор 196 с сопротивлением 25000 Ом, электрически связанный с источником 190 питания и с сигнальным проводником 197 источника питания, электрически связанным с проводником 184, направленным вниз от резистора 196. Канал 188 также включает в себя процессор 193, электрически связанный с проводником 197. Канал 188 дополнительно включает в себя электрически заземляющее устройство 194 и кабелепровод 195 заземления. Резистор 196 и проводник 197 расположены в устройстве 154 сопряжения. Поэтому, второй канал 188 образован источником 190 питания, резистором 196, проводником 184, проводником 197, переключателем (герконом) 179, проводником 183, заземляющим устройством 194, проводником 195 и процессором 193.
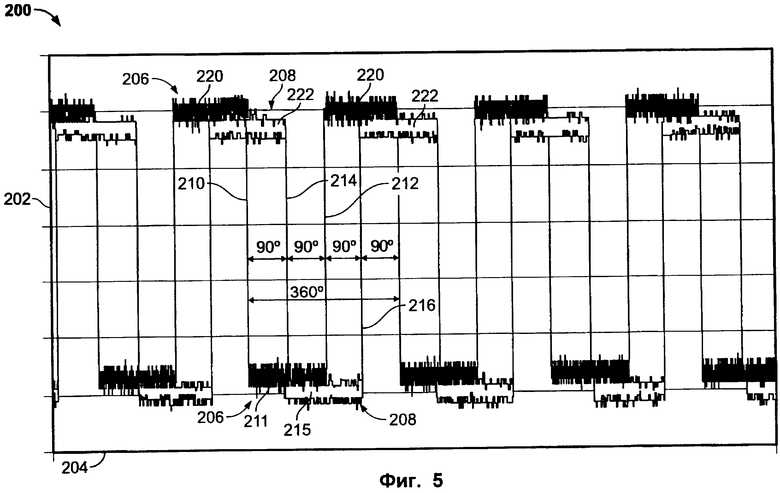
Фиг.5 представляет собой примерное графическое представление 200 нескольких форм сигнала, который можно получать, используя датчик 152 положения (показанный на Фиг.2 и 3) и систему 150 (показанную на Фиг.4). Ордината 202 (Y-ось) представляет собой амплитуду выходного напряжения сигнала от переключателей (герконов) 178 и 179 (оба показаны на Фиг.2 и 4) в единицах напряжения. Абсцисса 204 (X-ось) представляет собой единицы времени. Переключатель (геркон) 178 способствует канализированию первого индивидуального выходного сигнала 206 через первый канал 186 (показанный на Фиг.2 и 4), а переключатель 179 способствует канализированию второго индивидуального выходного сигнала 208 через второй канал 188 (показанный на Фиг.2 и 4). Сигналы 206 и 208 являются по существу прямоугольными сигналами и для ясности проиллюстрированы, как слегка смещенные относительно друг друга по амплитуде.
Сигналы, канализированные в первом канале 186, принимаются процессором 193 посредством проводников 192 и 195, и эти сигналы вместе образуют первый индивидуальный выходной сигнал 206. К переключателю 178 прикладывают приблизительно пятивольтное напряжение постоянного тока (VDC) посредством источника 190 электропитания, резистора 191, проводников 183 и 182 и заземляющего устройства 194 (все они показаны на Фиг.4). Заземляющее устройство 194 обеспечивает по существу все сигналы, канализируемые через проводник 195, наличием амплитуды напряжения, равной приблизительно нулевому напряжению постоянного тока во всей зоне действия системы 150. Когда переключатель 178 находится в открытом состоянии, электрический ток через первый канал 186 практически равен нулю. Более того, сигнал, который обладает амплитудой напряжения, равной приблизительно пятивольтному напряжению постоянного тока, канализируют через проводник 192. Сигнал 206 включает в себя выходную часть 220 первого канала (переключатель 178 открыт), которая представляет собой период времени, когда переключатель 178 открыт, а также суммарное значение разности потенциалов между проводниками 192 и 195. Часть 220 графически отображает эту разность потенциалов.
Аналогично, сигналы, канализированные во втором канале 188, принимаются процессором 193 через проводники 197 и 195, и эти сигналы вместе образуют второй 208 индивидуальный сигнал. К переключателю 179 прикладывают приблизительно пятивольтное напряжение постоянного тока (VDC) посредством источника 190 электропитания, резистора 196, проводников 183 и 184 и заземляющего устройства 194 (все показаны на Фиг.4). Заземляющее устройство 194 обеспечивает по существу все сигналы, канализируемые через проводник 195, наличием амплитуды напряжения, равной приблизительно нулевому напряжению постоянного тока во всей зоне действия системы 150. Когда переключатель 179 находится в открытом состоянии, электрический ток через второй канал 188 практически равен нулю. Более того, сигнал, который обладает амплитудой напряжения, равной приблизительно пятивольтному напряжению постоянного тока, канализируют через проводник 197. Сигнал 208 включает в себя выходную часть 222 первого канала (переключатель 179 открыт), которая представляет собой период времени, когда переключатель 179 открыт, а также ассоциативное значение разности потенциалов между проводниками 197 и 195. Часть 222 графически отображает эту разность потенциалов. В примерном варианте осуществления, части 220 и 222, соответственно, сигналов 206 и 208 по существу одинаковы.
Сигнал 206 также включает в себя первый фронт 210 отрицательного магнитного импульса и первый фронт 212 положительного магнитного импульса. Фронт 210 генерируется, поскольку магнитный поток каждого магнита превышает порог чувствительности переключателя 178, поскольку магниты 176 приближают переключатель 178, и закрывается переключатель 178. Фронт 212 генерируется, поскольку магнитный поток вблизи переключателя 178 ослабевает, поскольку каждый магнит 176 удаляется от переключателя 178, и переключатель 178 открывается. Создается часть 211 сигнала 206, соответствующая положению «переключатель 178 закрыт», и она простирается между фронтами 210 и 212. Часть 211 эквивалентна продолжительности времени, когда напряженность магнитного поля вблизи переключателя 178 превышает порог чувствительности переключателя 178 и суммарную разность потенциалов поперек переключателя 178. При закрытии переключателя 178, электрическому току дают возможность протекать через первый канал 186, включая переключатель 178, от источника 190 питания до заземляющего устройства 194, понижая, таким образом, амплитуду напряжения сигнала, канализируемого через проводник 192, практически до нуля. Поэтому, разность потенциалов между проводниками 192 и 195 практически равна нулю.
Аналогично, выходной сигнал 208 также включает в себя второй фронт 314 отрицательного магнитного импульса и второй фронт 216 положительного магнитного импульса. Также, аналогично, создается часть 215 сигнала 208, соответствующая положению «переключатель 179 закрыт», и она простирается между фронтами 214 и 216. При закрытии переключателя 179, электрическому току дают возможность протекать через второй канал 188, включая переключатель 179, от источника питания 190 до заземляющего устройства 194, понижая, таким образом, амплитуду напряжения сигнала, канализируемого через проводник 197, практически до нуля. Поэтому, разность потенциалов между проводниками 197 и 195 практически равна нулю. В примерном варианте осуществления, части 211 и 215 сигналов 206 и 208, соответственно, практически аналогичны.
Один магнитный цикл задается, как вращательное движение ротора 168 от первого магнита 176 до следующего магнита 176. Один магнитный цикл представлен на Фиг.4 равным 360°, т.е. угол 360° по существу эквивалентен периоду времени между фронтом 210 и следующим событием генерирования фронта 210. Следовательно, угол поворота 90° по существу эквивалентен периоду времени между фронтом 210 и фронтом 214. Также, угол 90° эквивалентен периоду времени между фронтом 214 и фронтом 212 и периодом времени между фронтом 212 и фронтом 216. Более того, угол 90° по существу эквивалентен периоду времени между фронтом 216 и следующим событием генерирования фронта 210. Данная последовательность событий по существу воспроизводится для каждого магнитного цикла. В примерном варианте осуществления, датчик 152 положения включает в себя пять магнитов 176, и каждый поворот на 360° ротора 168 датчика положения (показанного на Фиг.2 и 3) генерирует пять магнитных циклов. Поэтому, каждый магнитный цикл по существу эквивалентен углу 72° поворота ротора 168 и каждому квадранту магнитного цикла в 360°, т.е. угол 90° магнитного цикла по существу эквивалентен углу 18° поворота ротора 168.
Сигнал 206 опережает выходной сигнал 208, если датчик 152 положения вращается по часовой стрелке. Напротив, если сигнал 208 опережает выходной сигнал 206, это означает, что датчик 152 положения вращается против часовой стрелки. В примерном варианте осуществления, амплитуда выходных сигналов 206 и 208 напряжения, возникающая, соответственно, когда части 220 и 222 находятся под напряжением приблизительно пять вольт постоянного тока, а через переключатели 178 и 179 пропускают ток, равный практически нулю ампер. В отличие от этого, амплитуда выходных сигналов 206 и 208 напряжения, выходящих, соответственно, из переключателей 178 и 179, когда напряжение частей 211 и 215 составляет приблизительно ноль вольт постоянного тока. Более того, во время периодов, когда части 211 и 215 накладываются друг на друга, система 150 рассеивает менее одной трети микроватта мощности.
Примерные значения напряжения, тока и мощности, связанные с системой 150, включая датчик 152 положения, как описано в данном документе, способствуют снижению потенциала случайного электрического дугообразования, связанного с датчиком 152 положения, обладающего достаточными энергиями для возбуждения воспламенения предварительно заданных материалов и соединений. Более того, в примерном варианте осуществления, датчик 152 положения не связан электрически ни с одним из значительных внешних источников питания, т.е. с источниками питания, которые сконфигурированы таким образом, чтобы передавать электроэнергию мощностью более одного микроватта. Как таковой, датчик 152 положения можно использовать в применениях, в которых требуется взрывобезопасное устройство, например, отвечающее условиям Класса I, Раздела 1, но не ограниченное данным устройством. Такие условия могут существовать для устройств, которые включают в себя химические агрегаты, зерновые элеваторы и станции передачи природного газа, но не ограничены ими. В качестве альтернативы, можно использовать любые значения напряжения, средней мощности, максимальной мощности, среднего тока и максимального тока, которые облегчают эксплуатацию датчика 152 положения, как описано в данном документе.
Обращаясь снова к Фиг.1, в ходе эксплуатации установки 100, поскольку кабель 114 вытягивают из барабана 110 и втягивают в него для изменения глубины бурильной трубы 14, датчик 152 положения, который вращательно связан с валом 112 буровой лебедки, способствует канализированию выходных сигналов 206 и 208, которые передаются в устройство 154 сопряжения, соответственно по проводникам 182 и 184. Датчик 152 положения представляет собой инкрементный датчик 152 положения, который измеряет относительную глубину от стартовой глубины, а также измеряет изменения глубины по направлению вверх или вниз от этой стартовой глубины. Предварительно созданный набор данных, который соответствует исходной стартовой глубине, вводят вручную в систему 150. Устройство 154 и узел 158 обработки данных принимают первую группу сигналов 206 и 208, а узел 158 использует, по меньшей мере, один резидентный конверсионный алгоритм для определения первой глубины бурильной трубы 124. Поскольку вал 112 вращают для изменения глубины бурильной трубы 124 до второй позиции, вторую группу сигналов 206 и 208 направляют в устройство 154, которое использует, по меньшей мере, один резидентный конверсионный алгоритм для определения количества и полярности магнитных циклов. Данные о количестве и полярности магнитных циклов, определенные устройством 154, передаются на узел 158 обработки данных, в котором задействовано несколько конверсионных алгоритмов для определения расстояния перемещения бурильной трубы 124, направления ее перемещения и скорости перемещения. Примеры конверсионных алгоритмов могут включать в себя, но не ограничены, алгоритмы интегрирования для преобразования количества и полярности магнитных циклов, которые отвечают за расстояние и направление перемещения бурильной трубы 124, в величины, которые могут быть интерпретированы оператором. Обработанные сигналы впоследствии передаются на OIT 160.
Способы и устройства для контроля вала роторного механизма, как описано в данном документе, облегчают эксплуатацию и контроль роторной буровой установки. Конкретнее, роторный датчик положения, описанный в данном документе, способствует созданию результативной и эффективной схемы измерения глубины бурильной трубы. Также, роторный датчик положения облегчает эксплуатацию пассивной операционной системы с автономными маломощными компонентами, в котором отсутствует необходимость во внешнем источнике электропитания, и которая является взрывобезопасной в опасной окружающей среде. Дополнительно, роторный датчик положения также способствует повышению надежности буровой установки и снижению эксплуатационных расходов и простоев буровой установки. Более того, роторный датчик положения также облегчает эксплуатацию оборудования, в которое он входит, - химические агрегаты, зерновые элеваторы и станции передачи природного газа, но не ограниченные ими.
Примерные варианты осуществления роторных датчиков положения, связанных со схемами измерения глубины бурильной трубы, подробно описаны выше. Способы, устройства и системы не ограничены ни конкретными воплощениями, описанными в данном документе, ни конкретной проиллюстрированной буровой установкой.
Поскольку изобретение было описано на основе различных конкретных вариантов воплощения, специалистам в данной области техники должно быть понятно, что изобретение можно применять с модификациями в рамках сущности и объема формулы изобретения.
Изобретение относится к роторным механизмам, а конкретнее к способам и устройствам для контроля роторных механизмов. Техническим результатом является повышение точности определения положения буровой компоновки. Датчик положения для использования совместно с механизмом включает в себя, по меньшей мере, один подвижный элемент. Датчик положения включает в себя, по меньшей мере, один чувствительный элемент, сконфигурированный таким образом, что он активируется посредством магнитного потока. Датчик положения сконфигурирован для рассеивания электрических сигналов с амплитудой мощности, которая составляет менее приблизительно одного микроватта. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Датчик (152) положения для использования с механизмом (100), включающим в себя, по меньшей мере, один подвижный элемент, причем упомянутый датчик положения включает в себя, по меньшей мере, один чувствительный элемент, сконфигурированный таким образом, что он активируется посредством магнитного потока, а упомянутый датчик положения сконфигурирован таким образом, что он рассеивает электрические сигналы с амплитудой мощности, которая составляет менее приблизительно одного микроватта.
2. Датчик (152) положения по п.1, в котором, по меньшей мере, один упомянутый чувствительный элемент содержит несколько переключателей (178, 179), где каждый из упомянутых переключателей сконфигурирован таким образом, что он рассеивает электрические сигналы с амплитудой мощности, которая составляет менее приблизительно одной трети микроватта.
3. Датчик (152) положения по п.1, в котором механизм (100) представляет собой роторный механизм, а подвижный элемент представляет собой вращающийся элемент, причем датчик положения дополнительно содержит:
по меньшей мере, один ротор (168), сконфигурированный таким образом, что он вращательно связан с роторным механизмом, по меньшей мере, одним вращающимся элементом;
герметизированный корпус (164), простирающийся, по меньшей мере, вдоль части, по меньшей мере, одного упомянутого ротора, таким образом, что между упомянутым корпусом и упомянутым ротором образован зазор; и
множество магнитов (176), связанных, по меньшей мере, с частью, по меньшей мере, одного упомянутого ротора.
4. Датчик (152) положения по п.3, в котором упомянутое множество магнитов (176) сконфигурировано таким образом, что упомянутые магниты разнесены по окружности, по существу, на равном расстоянии друг от друга, вокруг, по меньшей мере, одного упомянутого ротора (168), а самая внешняя по радиусу часть каждого магнита из упомянутого множества магнитов, по существу, находится на одном уровне с внешней (170) поверхностью упомянутого ротора.
5. Датчик (152) положения по п.3, в котором, по меньшей мере, один упомянутый чувствительный элемент соединен с упомянутым корпусом (164) и сконфигурирован таким образом, что он принимает магнитный поток из упомянутого множества магнитов (176).
6. Датчик (152) положения по п.5, в котором упомянутое множество магнитов (176) управляет работой, по меньшей мере, одного упомянутого магнитного чувствительного элемента.
7. Датчик (152) положения по п.5, в котором, по меньшей мере, один упомянутый чувствительный элемент и упомянутое множество магнитов (176) сконфигурировано для генерирования сигнала, указывающего, по меньшей мере, на одно направление вращения упомянутого ротора (168) и на число оборотов (169) упомянутого ротора.
8. Система измерения для буровой (100) компоновки, включающей в себя, по меньшей мере, один вращающийся элемент, при этом система содержит:
датчик (152) положения, содержащий, по меньшей мере, один чувствительный элемент, сконфигурированный таким образом, что он активируется посредством магнитного потока, а упомянутый датчик положения сконфигурирован в виде канала, электрически сконфигурированного для рассеивания электрических сигналов с амплитудой мощности, которая составляет менее приблизительно одного микроватта; и
по меньшей мере, одного процессора (193), соединенного для электронной передачи данных с упомянутым датчиком (152) положения, по меньшей мере, через один вводной канал (186), причем, по меньшей мере, один упомянутый процессор сконфигурирован для приема и обработки, по меньшей мере, одного выходного (206) сигнала датчика положения.
9. Система измерения по п.8, в которой, по меньшей мере, один упомянутый чувствительный элемент содержит несколько переключателей (178, 179), где каждый из упомянутых переключателей сконфигурирован для рассеивания электрических сигналов с амплитудой мощности, которая составляет менее приблизительно одной трети микроватта.
10. Система измерения по п.8, в которой упомянутый датчик (152) положения дополнительно содержит:
по меньшей мере, один ротор (168), сконфигурированный таким образом, что он вращательно связан с упомянутой буровой компоновкой, по меньшей мере, одним вращательным элементом;
герметизированный корпус (164), простирающийся, по меньшей мере, вдоль части, по меньшей мере, одного упомянутого ротора, таким образом, что между упомянутым корпусом и упомянутым ротором образован зазор; и
множество магнитов (176), связанных, по меньшей мере, с частью, по меньшей мере, одного упомянутого ротора.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ | 1997 |
|
RU2155865C2 |
| Устройство для измерения длины колонны труб при спускно-подъемных операциях | 1989 |
|
SU1716113A1 |
| US 4156467 A1, 29.05.1979 | |||
| СПОСОБ ПОЛУЧЕНИЯ КОМПЛЕКСА СИЛИБИНИНА С ЦИКЛОДЕКСТРИНОМ, КОМПЛЕКС ВКЛЮЧЕНИЯ СИЛИБИНИНА С ЦИКЛОДЕКСТРИНОМ, ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ АНТИГЕПАТОТОКСИЧЕСКОЙ АКТИВНОСТИ И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 1991 |
|
RU2108109C1 |

