Предлагаемое изобретение относится к методам контроля формы корпуса судна, а именно к определению остаточных деформаций, выраженных в остаточном продольном изгибе корпуса.
До настоящего времени точное определение этого параметра являлось сложной технической задачей. Так как остаточный изгиб характеризуется тем, что не исчезает после прекращения действия внешних сил, то на стапеле/или в доке, когда судно находится на плаву под действием силы веса и силы гидростатического поддержания, истинную величину этого параметра выявить невозможно. Поэтому обычно для определения остаточного продольного изгиба корпуса судна применяется приближенный метод, при котором величину изгиба определяют по формуле:

где:
уост - остаточный продольный изгиб корпуса судна;
Уобщ - общий изгиб корпуса судна под заданной нагрузкой;
Уупр - упругий изгиб корпуса судна под заданной нагрузкой.
Определение уобщ осуществляют измерением с помощью геодезических приборов по специальным методикам, что требует больших трудо- и временных затрат и использования дорогостоящего оборудования. Значительные трудности вызывает и вычисление Уупр. Один из способов определения Уупр описан в монографии Давыдова В.В. и др. Учебный справочник по прочности судов внутреннего плавания. - М.: Речной транспорт, 1958, С.754. Способ основан на математических расчетах кривизны продольной оси корпуса в соответствии с формулой:

где:
D1 и D2 - постоянные интегрирования, определяемые из граничных условий;
х=0; у=0; D1=0;
x=L; y=0;  ;
;
x - координата по длине судна;
L - длина судна;
 - кривизна упругой изогнутой оси корпуса на расстоянии х от начала;
- кривизна упругой изогнутой оси корпуса на расстоянии х от начала;
М(х) - изгибающий момент от внешней нагрузки на корпус судна на расстоянии х от начала;
J(x) - момент инерции площади поперечного сечения корпуса относительно нейтральной оси на расстоянии х от начала;
Е - модуль нормальной упругости.
Метод, как указывалось выше, является достаточно трудоемким и длительным и при этом не дает высокой точности. Это связано с погрешностями при вычислении изгибающего момента от внешних нагрузок и момента инерции каждого поперечного сечения, величина которого меняется по длине судна из-за конструктивных особенностей, износа и местных остаточных деформаций корпуса. Поэтому для более точного определения Уупр проводят дефектацию корпуса и вычисление геометрических характеристик каждого сечения, что в еще большей степени затягивает и усложняет процесс.
Известен способ определения остаточного продольного изгиба корпуса судна по результатам измерений деформации каждой продольной связи (см. Гунин И.А. Обобщение данных по натурным замерам остаточного прогиба корпуса и установление его влияния на общую прочность судов. Труды ЛИВТа, вып.135. - Л.: Транспорт, 1972, С.45-49). Остаточный изгиб в этом случае определяется по формуле:

где:
λi - первоначальная деформация i-ой поперечной связи;
fi - площадь сечения i-ой продольной связи;
Zi - отстояние i-ой продольной связи от нейтральной оси поперечного сечения;
J - момент инерции площади поперечного сечения корпуса относительно нейтральной оси;
А и В - постоянные интегрирования, определяемые из граничных условий.
Определенным достоинством указанного способа в отличие от вышеприведенного аналога является возможность отказа от дорогостоящего геодезического оборудования. Однако, как и предыдущий аналог, этот способ недостаточно технологичен. Недостатком его является сложность определения первоначальной деформации, вычисление которой требует учета большого количества факторов, вызывающих появление деформации, что вносит значительные погрешности при расчете искомого параметра (см., например, Гатовский К.М. и др. Измерение напряженного состояния корпусов судов в процессе эксплуатации и ремонта. Труды ЛИВТа, вып.81. - Л.: Транспорт, 1972, С.35). Это соответственно сказывается на трудоемкости процесса и точности получения окончательного результата.
Анализ отобранной в процессе поиска информации позволил выявить способ по пат. РФ №2298162, МПК G01M 5/00, являющийся наиболее близким аналогом заявляемого решения и выбранный в качестве его прототипа. Указанный способ определения остаточных деформаций (изгибов) корпуса судна включает определение ординат (стрелок изгиба) изогнутой оси корпуса судна под заданной нагрузкой, определение упругого изгиба от суммы всех воздействий и вычисление величины остаточных деформаций корпуса как разности ординат изогнутой оси корпуса и упругой деформации от действия суммы всех воздействий.
Способ осуществляется следующим образом.
Производят определение ординат изогнутой оси корпуса судна под нагрузкой, например путем измерения осадок, высоты надводного борта, при помощи ватерпаса, оптическими методами и др. Далее вычисляют упругий изгиб путем определения максимального изгиба на миделе корпуса по известной формуле академика Шиманского Ю.А. и последующего распределения упругого изгиба от миделя к носу и корме судна по параболе 2-й степени. При этом расчет упругого изгиба производится с учетом того, что по длине корпуса существенно меняются геометрические характеристики и соответственно момент инерции его поперечного сечения, а у судна, находящегося в эксплуатации, эти изменения усугубляются из-за неравномерного по длине износа корпуса и наличия местных остаточных деформаций. После вычисления упругого изгиба определяют значение остаточных деформаций (изгибов) как разность измеренных ординат изогнутой оси корпуса и вычисленной упругой составляющей.
Недостатком прототипа является сложность получения окончательного результата, которое требует выполнения как минимум трех операций:
- измерения ординат изогнутой оси корпуса судна под нагрузкой;
- вычисления упругой составляющей от суммы всех воздействий на корпус судна;
- вычитания упругой составляющей из результатов измерения.
В свою очередь для определения упругого изгиба рассчитывают максимальный изгибающий момент от нагрузки и момент инерции от поперечного сечения с учетом износов и местных остаточных деформаций, для получения точного значения которых выполняется дополнительная операция - дефектация судна.
Заявляемый способ позволяет получить новый по сравнению с прототипом технический результат, заключающийся в упрощении процесса определения остаточного продольного изгиба. Указанный результат достигается за счет исключения из математического расчета операции вычисления упругого изгиба продольной оси объекта под нагрузкой, а также упрощения операции измерения.
Для достижения указанного технического результата используется следующая совокупность существенных признаков: в способе определения остаточного продольного изгиба корпуса судна (включающем так же, как и прототип, измерение отклонений изогнутой продольной оси корпуса судна под нагрузкой и математический расчет величины остаточного продольного изгиба), в отличие от прототипа, измерение осуществляют на отдельных, равных между собой участках изогнутой продольной оси, путем нахождения и вычисления кривизны оси по ее отклонениям от прямых линий, соединяющих концы участков, при этом измерение производят в середине каждого участка, в свою очередь математический расчет осуществляют непосредственно по вычисленной величине кривизны в соответствии с формулой:

где:
уост(х) - остаточный продольный изгиб корпуса судна;
 - кривизна на i-ом участке по длине судна, вычисляемая по формуле:
- кривизна на i-ом участке по длине судна, вычисляемая по формуле:
 ,
,
где:
fi - отклонение оси корпуса судна на i-ом участке;
l - длина участка, на котором производится измерение;
L - расстояние между началом и концом измеряемой длины корпуса;
Li - расстояние от начала до середины участка, на котором производится измерение;
 и
и  - показатели, указывающие на то, что слагаемые учитываются только в том случае, когда выражение в скобках, возводимое в квадрат, имеет положительное значение,
- показатели, указывающие на то, что слагаемые учитываются только в том случае, когда выражение в скобках, возводимое в квадрат, имеет положительное значение,
при этом l=5÷6 м.
Для измерения отклонений может быть использовано устройство, состоящее из двух стоек, неподвижной, закрепленной на палубе судна в начале участка и подвижной, установленной с возможностью перемещения вдоль него. На неподвижной стойке размещается лазерная указка на определенной высоте от основания, на подвижной - нанесена шкала с делениями, при этом лазерная указка закрепляется таким образом, чтобы ее перекрестие совпало с началом отсчета на шкале подвижной стойки, установленной в конце участка.
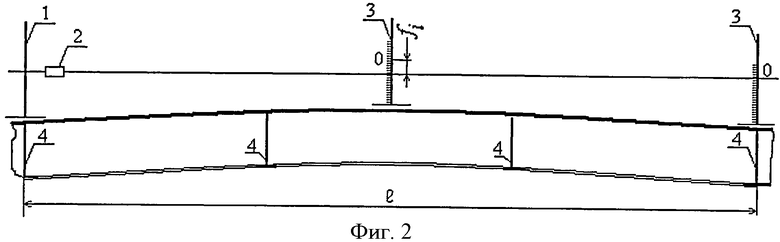
Сущность изобретения заключается в том, что при определении остаточного изгиба корпуса судна измерения отклонений продольной изогнутой оси корпуса судна под нагрузкой производят не за счет измерения ординат оси (линии палубы) относительно горизонтальной плоскости (например, путем измерения осадок судна или высоты его надводного борта), а путем определения кривизны палубы (оси) на отдельных, равных между собой участках палубы (оси) (см. фиг.1, 2). О наличии последней свидетельствуют показания установленного на палубе измерительного устройства, фиксирующего отклонение палубы (изогнутой оси) от прямой линии в месте изгиба. При этом математический расчет остаточного изгиба осуществляют непосредственно по результатам измерений, а не вычитанием из полученных данных величин рассчитанной упругой составляющей.
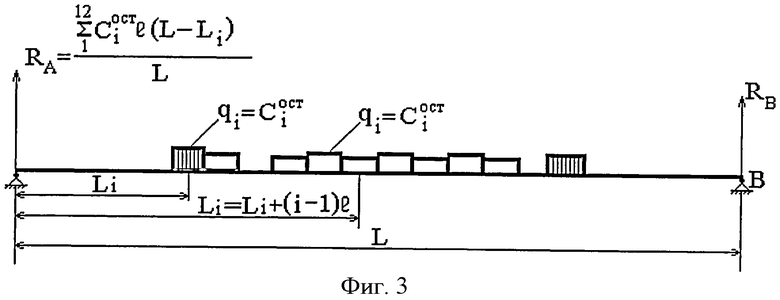
В основе заявляемого способа лежит графоаналитический метод определения ординат изогнутой оси балки по вычисленной кривизне оси в каждой ее точке. Согласно указанному методу (фиг.3) ордината действительной изогнутой балки в заданном сечении от заданной нагрузки численно равна изгибающему моменту в том же сечении фиктивной балки от распределенной нагрузки, интенсивностью, равной кривизне балки (см. Беляев Н.М. Сопротивление материалов. - М.: Наука, 1965, С.375-384). Возможность графоаналитического подхода к решению проблемы определения уост корпуса судна, с учетом перечисленных ниже факторов, показали научные исследования, проведенные специалистами Санкт-Петербургского Государственного университета водного транспорта по заданию Российского речного регистра.
В результате исследований было экспериментально выявлено и математически подтверждено, что:
- корпус судна имеет остаточную кривизну только на участках, где произошли пластические деформации;
- участки, подвергшиеся наибольшей деформации, располагаются в средней части корпуса;
- оптимальная длина участка для проведения измерений - l=5÷6 м и соответствует трем рамным шпациям;
- кривизна корпуса, измеренная на палубе или днище, совпадает с кривизной нейтрального слоя;
- изменение кривизны из-за упругого изгиба судна под действием нагрузки является величиной настолько малой (0,45 мм), что ею при расчетах можно пренебречь.
Это позволило представить изогнутую ось корпуса в виде ломаной линии, состоящей из прямолинейных участков, сопрягающихся дугами в зонах, где произошли пластические деформации (выявлена кривизна). Вычисляя кривизну на этих участках как частное от деления величины измеренного отклонения оси от прямой линии, соединяющей концы участков, на длину участка  и используя ее в расчетах, можно исключить один из важнейших факторов, влияющих на точность определения остаточного изгиба корпуса - неравномерность распределения момента инерции поперечного сечения по длине корпуса и соответственно погрешности в его определении для каждого сечения.
и используя ее в расчетах, можно исключить один из важнейших факторов, влияющих на точность определения остаточного изгиба корпуса - неравномерность распределения момента инерции поперечного сечения по длине корпуса и соответственно погрешности в его определении для каждого сечения.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - упрощение определения остаточного продольного изгиба корпуса судна решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
Вместе с тем проведенный информационный поиск в области контроля состояния судов выявил решения, содержащие отдельные отличительные признаки заявляемого изобретения. Так, в известном способе, описанном в статье Гунина И.А. Обобщение данных по натурным замерам остаточного прогиба корпуса и установление его влияния на общую прочность судов. Труды ЛИВТа, вып.135. - Л.: Транспорт, 1972, С.45-49, определение остаточного продольного изгиба корпуса судна осуществляется по формуле, позволяющей получить окончательный результат уост без расчета упругой составляющей. Отличие предлагаемого способа от известного метода заключается в разном подходе к вычислению остаточного изгиба. В предлагаемом способе задача, по сути, решается геометрическим путем с использованием одного исходного параметра, измеряемого на отдельных участках корпуса, в то время как в известном аналоге расчет ведется на базе ряда параметров, учитывающих физические характеристики объекта, а также время и причину их возникновения.
Таким образом, сопоставительный анализ выявленной информации в области контроля состояния судов и отдельных отличительных признаков предлагаемого изобретения показал, что последнее не вытекает явным образом из существующего уровня техники и позволяет сделать вывод о соответствии заявляемого способа критерию «изобретательский уровень».
Сущность предлагаемого изобретения поясняется чертежами, где:
на фиг.1 - изображена конструкция деформированного корпуса судна;
на фиг.2 - изображена схема измерения отклонения изогнутой оси;
на фиг.3 - изображена схема фиктивной балки, загруженной фиктивной нагрузкой;
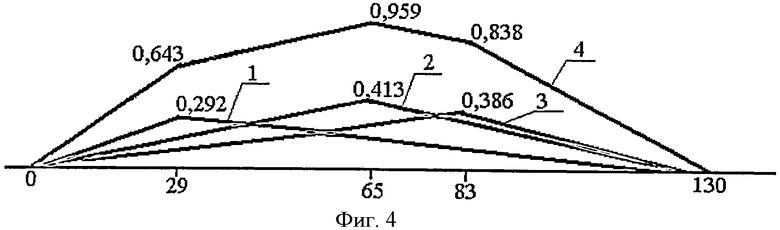
на фиг.4 - показаны изображения остаточной изогнутой оси корпуса судна для 4-х различных вариантов расположения изгиба;
на фиг.5 - дано изображение изогнутых осей корпуса судна, полученных в результате расчетов по известному и предлагаемому способам.
Для осуществления способа использовано устройство, состоящее из двух стоек, одна из которых 1 с лазерной указкой 2 закрепляется на палубе судна в начале участка, а другая 3 перемещается вдоль него. Лазерная указка 2 устанавливается на стойке 1 на высоте 200 мм от ее основания. На подвижную стойку 3 наносится шкала с делениями 1 мм.
В начале измерений подвижная стойка 3 устанавливается на противоположном от неподвижной конце участка на расстоянии 5÷6 м от нее, при этом лазерная указка 2 закрепляется таким образом, чтобы ее перекрестие совпало с началом отсчета на шкале подвижной стойки. Затем подвижная стойка 3 переносится на середину участка, и по ее шкале определяется отклонение изогнутой оси fi от прямой линии. Процесс измерения производят для каждого участка палубы, а с целью повышения точности измерений - с двух ее бортов. По показаниям устройства вычисляется кривизна продольной оси корпуса судна  по формуле 5, значение которой подставляется в формулу 4.
по формуле 5, значение которой подставляется в формулу 4.
Пример реализации способа.
Определение остаточного продольного изгиба корпуса судна (в виде перегиба) проводилось для танкера типа «Волгонефть - 265» исходя из того, что L=130 м; l=6 м; fi=0,01 м.
В табл.1 представлены результаты расчетов для 4-х вариантов расположения изогнутых участков оси корпуса судна:
1 - кривизна зафиксирована только на участке 1, L1=29 м, (уост1);
2 - кривизна зафиксирована только на участке 6, L6=65 м, (уост2);
3 - кривизна зафиксирована только на участке 9, L9=83 м, (уост3);
4 - кривизна зафиксирована на трех участках 1, 6, 9 (уостΣ).
Кривизна на измеряемых участках определялась по формуле 5:
 ,
,
а величина остаточного изгиба - по формуле 4:

На фиг.4 представлены изображения остаточной изогнутой оси корпуса судна для всех 4-х случаев.
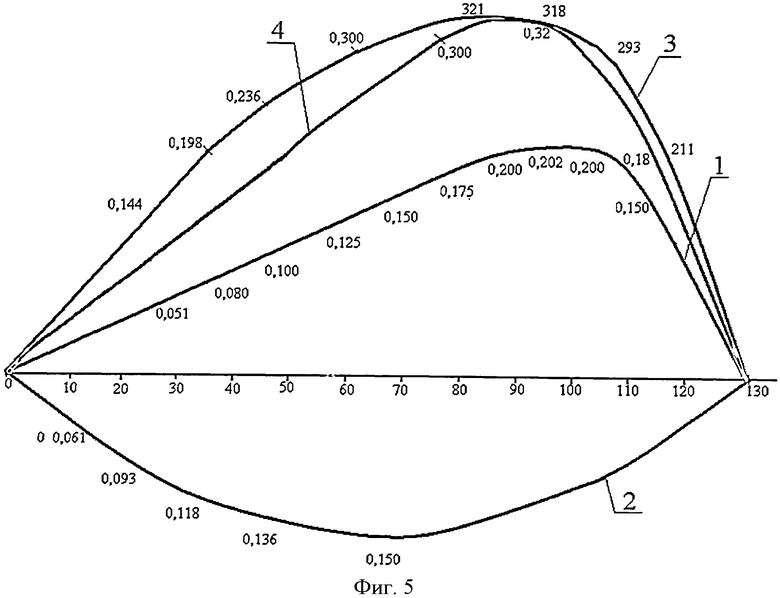
На фиг.5 показаны:
- результаты измерения ординат изогнутой оси корпуса танкера с грузом при осадке носом Тн=3,0 м и кормой Тк=3,65 м (кривая 1);
- результаты расчетов ординат упругого прогиба, произведенных по формуле академика Шиманского Ю.А. (кривая 2);
- результаты определения остаточного изгиба продольной оси, полученные в соответствии с известным способом (кривая 3);
- результаты вычислений ординат остаточного изгиба продольной оси, произведенных по формуле 4, с учетом того, что на кривой 1 на участке 75÷95 м fi=0,015 м, на участке 95÷115 м fi=0,025 м, а на остальных участках fi=0 (кривая 4).
Из чертежа видно, что максимальные значения ординат остаточного изгиба при расчете по известному и предлагаемому способам совпали, что доказывает возможность осуществления и реализации изобретения по указанному в заявке назначению (определение остаточного продольного изгиба корпуса судна). Но при этом в первом случае определение искомого параметра потребовало проведения анализа загрузки судна, определения максимального изгибающего момента на «тихой» воде, расчета момента инерции поперечного сечения с учетом износа и местных деформаций. В то время как предлагаемый метод позволяет получить тот же результат в более короткий срок и без больших трудозатрат. Кроме того, с помощью заявляемого изобретения, в отличие от всех известных способов, можно определить место на корпусе судна, где необходимо произвести ремонт.
Изложенное выше позволяет сделать вывод о соответствии способа критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЩИХ ОСТАТОЧНЫХ ДЕФОРМАЦИЙ КОРПУСОВ ТРАНСПОРТНЫХ И/ИЛИ СТОЯНОЧНЫХ СРЕДСТВ | 2006 |
|
RU2298162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КОРПУСА СУДНА, ИЗГОТОВЛЕННОГО ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ, НАХОДЯЩЕГОСЯ В ЭКСПЛУАТАЦИИ, ИСПОЛЬЗУЮЩИЙ РЕЗУЛЬТАТЫ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПО ОБНАРУЖЕНИЮ ДЕФЕКТОВ ТИПА РАССЛОЕНИЕ | 2007 |
|
RU2354964C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| ВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 1993 |
|
RU2015772C1 |
| СПОСОБ ОЦЕНКИ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА С ДЕФЕКТНЫМИ СВАРНЫМИ СТЫКАМИ | 2016 |
|
RU2656163C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ИЗГИБНОЙ ЖЕСТКОСТИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ С ПОМОЩЬЮ КРИВИЗНОМЕРА | 2013 |
|
RU2535645C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ФОРМЫ И РАЗМЕРОВ КОРПУСОВ СУДОВ, ПОСТРОЕННЫХ В ЛЕКАЛЬНЫХ СТЕНДАХ | 2015 |
|
RU2610194C1 |
| СПОСОБ ПОСТРОЕНИЯ ДИАГРАММЫ ДЕФОРМИРОВАНИЯ МАТЕРИАЛА | 2006 |
|
RU2319945C1 |
| Способ изготовления сварных замкнутых профилей | 1989 |
|
SU1764907A1 |
| СПОСОБ ПРИБЛИЖЕННОГО ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ ТОЛЩИН | 2006 |
|
RU2380272C2 |
Предлагаемое изобретение относится к методам контроля формы корпуса судна, а именно к определению остаточных деформаций, выраженных в остаточном продольном изгибе корпуса. Технический результат от использования изобретения по сравнению с прототипом заключается в упрощении процесса определения остаточного продольного изгиба. Заявляемый способ так же, как и прототип, основан на измерении отклонений изогнутой продольной оси корпуса судна под нагрузкой и расчете величины остаточного продольного изгиба. Но в отличие от прототипа в нем измерение отклонений осуществляют на отдельных, равных между собой участках изогнутой продольной оси, путем нахождения и вычисления кривизны оси по ее отклонениям от прямых линий, соединяющих концы участков. При этом измерения производят в середине каждого участка, а искомый параметр рассчитывают непосредственно по вычисленной величине кривизны. 1 з.п. ф-лы, 1 табл., 5 ил.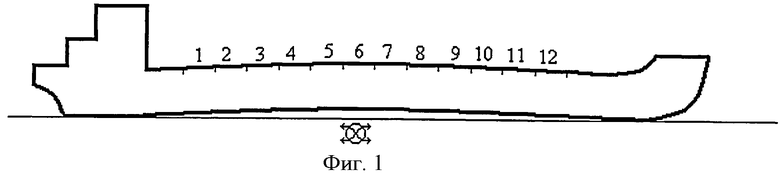
1. Способ определения остаточного продольного изгиба корпуса судна, включающий измерение отклонений изогнутой продольной оси корпуса судна под нагрузкой и математический расчет величины остаточного продольного изгиба, отличающийся тем, что в нем измерение осуществляют на отдельных равных между собой участках изогнутой продольной оси путем нахождения и вычисления кривизны оси по ее отклонениям от прямых линий, соединяющих концы участков, при этом измерение производят в середине каждого участка, в свою очередь, математический расчет осуществляют непосредственно по вычисленной величине кривизны в соответствии с формулой:

где Уост(х) - остаточный продольный изгиб корпуса судна;
- кривизна на i-м участке по длине судна, вычисляемая по формуле:
 ,
,
где fi - отклонение изогнутой оси корпуса судна на i-м участке;
l - длина участка, на котором производится измерение;
L - расстояние между началом и концом измеряемой длины корпуса;
Li - расстояние от начала до середины участка, на котором производится измерение;
 и
и  - показатели, указывающие на то, что слагаемые учитываются только в том случае, когда выражение в скобках, возводимое в квадрат, имеет положительное значение, при этом l=5÷6 м.
- показатели, указывающие на то, что слагаемые учитываются только в том случае, когда выражение в скобках, возводимое в квадрат, имеет положительное значение, при этом l=5÷6 м.
2. Способ по п.1, отличающийся тем, что в нем для измерения отклонений используют устройство, состоящее из двух стоек: неподвижной, закрепленной на палубе судна в начале измеряемого участка, и подвижной, установленной с возможностью перемещения вдоль него, при этом на неподвижной стойке размещается лазерная указка на заданной высоте от основания, на подвижной нанесена шкала с делениями, в свою очередь, лазерная указка закрепляется на неподвижной стойке таким образом, чтобы ее перекрестие совпало с началом отсчета на шкале подвижной стойки, установленной в конце участка.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЩИХ ОСТАТОЧНЫХ ДЕФОРМАЦИЙ КОРПУСОВ ТРАНСПОРТНЫХ И/ИЛИ СТОЯНОЧНЫХ СРЕДСТВ | 2006 |
|
RU2298162C1 |
| СПОСОБ КОНТРОЛЯ ОБЩИХ ОСТАТОЧНЫХ ДЕФОРМАЦИЙ КОРПУСОВ ТРАНСПОРТНЫХ И/ИЛИ СТОЯНОЧНЫХ СРЕДСТВ | 2006 |
|
RU2293957C1 |
| US 5425275 А, 20.06.1995 | |||
| ИНТЕГРАЛЬНОЕ МНОГОЭЛЕМЕНТНОЕ ФОТОПРИЕМНОЕ УСТРОЙСТВО ИНФРАКРАСНОГО ДИАПАЗОНА | 2004 |
|
RU2278446C1 |
| СПОСОБ МОНИТОРИНГА МОСТОВОГО ПЕРЕХОДА В ПРОЦЕССЕ ЕГО ЭКСПЛУАТАЦИИ | 2002 |
|
RU2250444C2 |

