Изобретение относится к электротехнике, а именно к электромагнитным коммутационным аппаратам, в которых требуется получить большой ход движения якоря. В частности, предложенный аппарат может быть использован в электромагнитных пускателях, реле или контакторах.
Известен электромагнитный аппарат с поступательным движением якоря (См., например, патент РФ №2343580, МПК H01F 7/18, H01H 47/32 «Электромагнитный привод», опубликованный 10.01.2009).
В известном электромагнитном аппарате движение якоря формируется за счет силы притягивания, создаваемой обмоткой возбуждения электромагнита, получающей электропитание от переменного или постоянного тока.
Недостаток известного технического решения состоит в том, что движение якоря в нем ограничено относительно небольшим ходом, что снижает диапазон его возможного применения.
Более близким по технической сущности, принятым за прототип, является электромагнитный аппарат с поступательным движением якоря, описанный в патенте РФ №2046540, МПК 6 H02P 7/62, «Электромагнитный привод возвратно-поступательного движения», опубликованный 20.10.1995.
В известном электромагнитном аппарате поступательное движение ферромагнитных якорей создается за счет электромагнитных приводов, выполненных в виде нескольких электромагнитов, размещенных один за другим в осевом направлении, включенных между собой согласно и получающих электропитание.
Система обеспечивает некоторое увеличение быстродействия и КПД привода.
Недостаток известного электромагнитного аппарата с поступательным движением якоря заключается в том, что в нем, так же как и в аналоге, не удается обеспечивать большой диапазон движения подвижного якоря и повышенный зазор между подвижным и неподвижным контактом.
Целью данного изобретения является увеличение диапазона движения якоря, обеспечение повышенного зазора между подвижным и неподвижным контактом.
Поставленная цель достигается за счет того, что в электромагнитном аппарате с поступательным движением якоря, содержащем расположенные один за другим в осевом направлении электромагниты, подвижный якорь, обмотки возбуждения электромагнитов, включенные параллельно и согласно от системы электропитания, систему нормально-замкнутых и нормально-разомкнутых контактов, согласно изобретению каждый электромагнит снабжен индивидуальным якорем, зазор между якорем и каждым последующим по направлению хода движения якорей электромагнитом установлен равным nδ, где δ - это зазор между первым якорем и первым электромагнитом, n - множитель, равный номеру электромагнита, к которому относится тот или иной якорь, все соседние якоря с двух сторон соединены между собой плоской V-образной пружиной, причем все электромагниты снабжены нормально-открытыми и нормально-замкнутыми контактами.
В варианте технического решения все обмотки возбуждения электромагнитов соединены с системой электропитания через общий включатель.
В варианте технического решения каждая последующая обмотка возбуждения электромагнита соединена с системой электропитания с помощью нормально-открытого контакта от предыдущего, по ходу движения якоря, электромагнита.
В варианте технического решения каждая обмотка возбуждения электромагнита соединена с цепью электропитания с помощью нормально-замкнутого контакта от расположенного по ходу движения якорей, электромагнита.
Наличие зазора между подвижным якорем и неподвижным электромагнитом каждого последующего по ходу направления движения электромагнитного привода равным nδ, где δ - это зазор между первым якорем и первым электромагнитом, n - множитель, равный номеру электромагнита, к которому относится тот или иной якорь, позволяет обеспечить суммарный зазор между последним по ходу движения якорем и электромагнитом равным nδ, где n - общее число электромагнитов.
Наличие плоских V-образных пружин, соединяющих соседние якоря с двух сторон, обеспечивает передачу движения от одного якоря ко всем последующим без потери энергии и с нарастающей скоростью движения системы якорей.
Соединение все обмоток возбуждения электромагнитов с системой электропитания через общий включатель упрощает систему управления электроприводом, приводящим в движение якоря.
Соединение каждой последующей по ходу движения якорей обмотки возбуждения электромагнита с системой электропитания с помощью нормально-открытого контакта от предыдущего, по ходу движения якоря, электромагнита способствует снижению общего пускового тока.
Соединение каждой обмотки возбуждения электромагнита с цепью электропитания с помощью нормально-замкнутого контакта от электромагнита, расположенного по ходу движения якорей позволяет уменьшить нагрев катушек или повысить их тяговую силу при включении.
Заявленное изобретение иллюстрируется чертежами.
На фиг.1 показана конструкция устройства при виде сбоку.
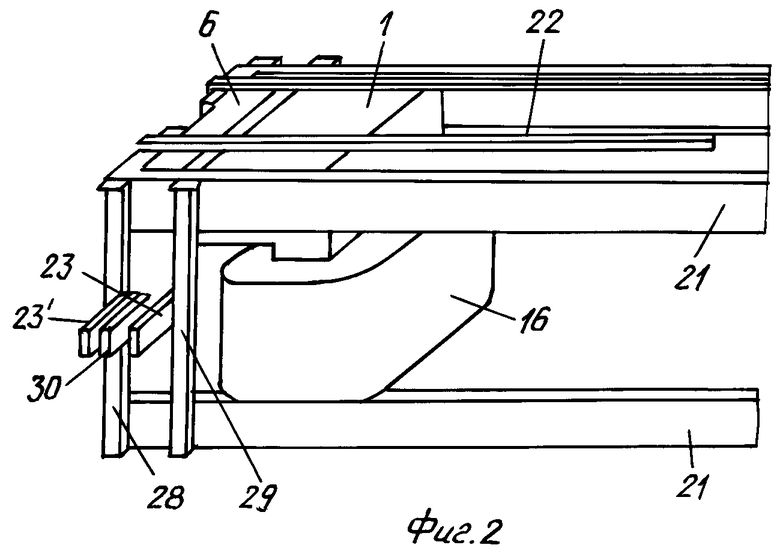
На фиг.2 изображен фрагмент устройства в изометрической проекции.
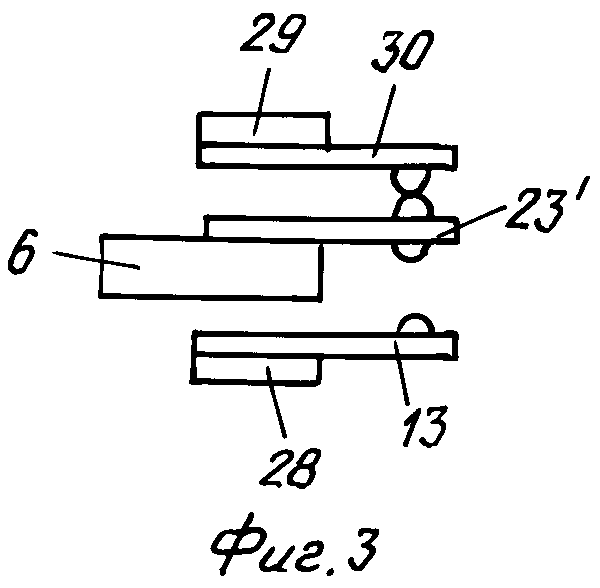
На фиг.3 представлено расположение контактов.
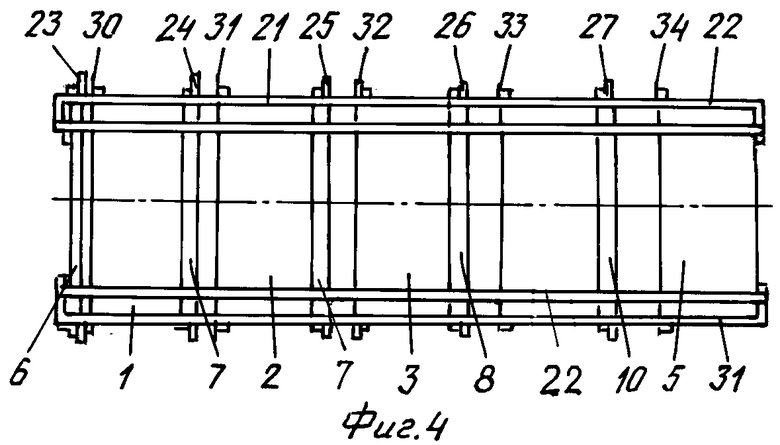
На фиг.4 показана конструкция при виде сверху.
Фиг.5 показывает устройство при виде с торца, со стороны якоря.
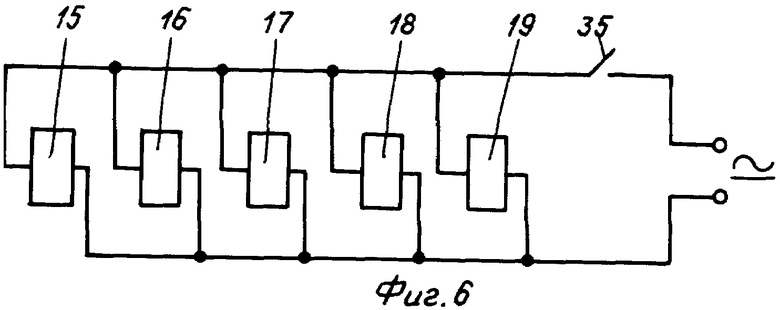
На фиг.6 представлена принципиальная электрическая схема одновременного включения обмоток возбуждения электромагнитов.
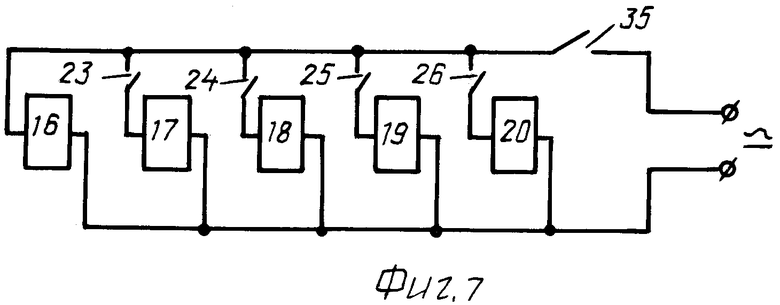
На фиг.7 нарисована принципиальная электрическая схема с последовательным включением обмоток возбуждения электромагнитов.
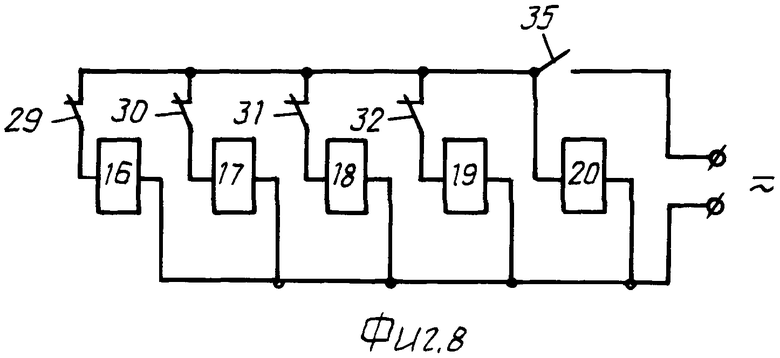
На фиг.8 имеется вариант принципиальной электрической схемы с последовательным отключением обмоток возбуждения электромагнитов.
Электромагнитный аппарат с поступательным движением якоря устроен следующим образом. Неподвижные электромагниты 1, 2, 3, 4, 5 (фиг.1, 2, 3, 4, 5) расположены один за другим в осевом направлении. Каждый электромагнит снабжен подвижным якорем, соответственно 6, 7, 8, 9 и 10. Количество электромагнитов и якорей зависит от величины требуемого зазора между последним, по ходу движения якорей, электромагнитом и его якорем. Подвижные якоря соответственно 6, 7, 8, 9, 10 электромагнитов установлены по отношению к каждому электромагниту с зазором (не обозначен) различающимся на величину nδ, где δ - зазор первого по ходу движения якоря, n - множитель, имеющий номер электромагнита, к которому относится тот или иной якорь. На данном чертеже отсчет начинается слева направо. Все соседние якоря с двух сторон соединены между собой плоской V-образной пружиной 11, 12, 13, 14 и 15 (фиг.1). Электромагниты снабжены обмотками возбуждения 16, 17, 18, 19, 20, обеспечивающими поступательное движение своего якоря.
Все электромагниты жестко соединены между собой общим каркасом, состоящим из продольных немагнитных планок 21 (фиг.2, 4, 5), охватывающих с торцов всю систему. Сверху и снизу каркас содержит немагнитные накладки 22, выполненные в виде полос, проходящих вдоль всех электромагнитов и якорей, предупреждающих смещение якорей вверх или вниз. Накладки 22 жестко соединены с торцевыми частями (не обозначены) немагнитных планок 21. Между якорем и соответствующим электромагнитом установлены возвратные пружины (не обозначены). Жесткость пружин обратно пропорциональна зазору между соответствующим якорем и электромагнитом. С одной стороны возвратные пружины упираются в центр якоря, а с другой стороны в центр обмотки возбуждения, для чего каждая катушка в месте сочленения с пружиной снабжена защитным кожухом (не обозначен). Каждый электромагнитный привод снабжают нормально-открытым контактом соответственно 23, 24, 25, 26 и 27. Неподвижные контакты сочленены с планками 21 с помощью прикрепленных к ним поперечных нетокопроводящих полос 28, 29 (фиг.2, 3, 4), а подвижные контакты 23 сочленены с якорями. При этом расстояние между контактами различается на величину nδ. Т.е. расстояние между контактами 27 последнего по направлению движения привода оказывается наибольшим. Помимо указанных нормально-открытых контактов, каждый привод снабжен нормально-замкнутыми контактами, обозначенными цифрами 30, 31, 32, 33 и 34. Контакты расположены на изолированных, обладающих пружинящими свойствами пластинах, которые снабжены токоподводами (не показан). Подвижные контакты имеют гибкие токоподводы (не показаны). Вся конструкция может быть снабжена общим защитным кожухом.
В варианте технического решения все обмотки возбуждения электромагнитов 16-20 соединены с системой электропитания через общий включатель 35 (фиг.6).
В варианте технического решения каждая последующая обмотка возбуждения электромагнита соединена с системой электропитания с помощью нормально-открытого контакта от предыдущего, по ходу движения якоря, электромагнита (фиг.7). В частности, обмотки возбуждения имеют в своей цепи следующие контакты: обмотка 16 - контакт 23, обмотка 17 - контакт 24, обмотка 18 - контакт 25 и, наконец, обмотка 19 - контакт 20.
В варианте технического решения каждая обмотка возбуждения электромагнита соединена с цепью электропитания с помощью нормально-замкнутого контакта от электромагнита, расположенного по ходу движения якорей (фиг.8). В частности, обмотки возбуждения имеют в своей цепи следующие нормально-замкнутые контакты: обмотка 16 - контакт 29, обмотка 17 - контакт 30, обмотка 18 - контакт 31, обмотка 19 - контакт 32.
Электропитание схемы может осуществляться как от цепи переменного, так и постоянного тока.
Электромагнитный аппарат с поступательным движением якоря работает следующим образом.
При включении общего включателя 35 (фиг.6) на все обмотки возбуждения электромагнитов одновременно подается электропитание. За счет электромагнитных сил, создаваемых обмотками, все якоря будут стремиться притянуться к полюсам соответствующих электромагнитов. Однако поскольку зазоры между якорями и электромагнитами различаются, то наибольшая электромагнитная сила будет иметь место между электромагнитом 1 и якорем 6 (фиг.1). Якорь 6, притягиваясь к электромагниту 1 через систему пружин 11-15, передаст это движение на все остальные якоря. Так, пружина 11 будет перемещать 7 якорь в сторону электромагнита 2, сокращая расстояние между ним и электромагнитом 2 на величину δ. Аналогичное действие будут производить все пружины, продвигая соответствующие якоря. Когда зазор между якорем 7 и электромагнитом 2 достигнет величины δ, сила взаимодействия между ними достигнет номинальной величины, а пружина 12 якоря продвинет последующий якорь 8 в сторону электромагнита 3. За счет имеющейся связки между пружинами и следующих за ними якорей все они продолжат движение. Когда расстояние между якорем 8 и электромагнитом 3 достигнет значения δ, их взаимодействие продолжит активный процесс перемещения последующих якорей. Затем устанавливается зазор δ между якорем 9 и электромагнитом 4. Вступая в период активного движения, он также продвинет все оставшиеся якоря на величину δ. Процесс продолжится и на конечной стадии вступает в свой активный черед взаимодействие между якорем 10 и электромагнитом 5. При этом пружины 11-15 будут выполнять три функции. С одной стороны они передают движения на все якоря, с другой стороны они, сжимаясь, передают энергию движения на последующие якоря, обеспечивая, таким образом, повышенную кинематику процесса движения. Одновременно они предупреждают перекос якорей. Сам процесс движения будет в некоторой степени напоминать пуск многоступенчатой ракеты, так как каждое новое включение последующего электромагнита будет сообщать подвижной системе якорей дополнительное ускорение. Поэтому последняя ступень включения будет двигать якорь 10 с большей скоростью, чем предыдущие и с большей скоростью, чем в традиционных релейно-контактных устройствах. Таким образом, за счет последовательного активного взаимодействия всех электромагнитных приводов удается обеспечить ускоренное движение якорей, увеличить просвет между контактами последней ступени включения. Очевидно, что повышенный в несколько раз зазор между контактами, превосходящий по величине зазор в сравнении с традиционной системой, и более высокая скорость движения контактов может обеспечить улучшенные коммутационные свойства системы. При этом движение на размыкание будет происходить с ускорением, что снизит вероятность возникновения электрической дуги между размыкаемыми контактами. Для возвращения системы в исходное состояние достаточно разомкнуть контакт 35 (фиг.6).
Если включение каждого последующего электромагнита производят за счет н-о контактов предыдущего по ходу движения электромагнита (фиг.7), то это приведет к снижению общего пускового тока при включении системы привода электромагнитов.
В варианте, когда отключение каждого последующего по ходу движения электромагнита производится с помощью нормально-замкнутых контактов (фиг.8) от последующего привода, то этот процесс приводит к выключению предыдущего электромагнита. Это позволяет уменьшить нагрев катушек или повысить их тяговую силу при включении. Одновременно и снижается общий пусковой ток.
Таким образом, в предложенном электромагнитном аппарате с поступательным движением якоря увеличен в несколько раз зазор между контактами в сравнении с традиционными релейно-контактными системами, что обеспечивает улучшенные коммутационные свойства таких реле или контакторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ЯКОРЯ С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ | 2010 |
|
RU2436222C1 |
| ЦЕНТРАЛЬНАЯ АВТОМАТИЧЕСКАЯ ТЕЛЕФОННАЯ СТАНЦИЯ | 1912 |
|
SU7793A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1995 |
|
RU2094877C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС | 2015 |
|
RU2601727C1 |
| ТЕЛЕФОННЫЙ СЕЛЕКТОР | 1925 |
|
SU6724A1 |
| Устройство болеховского для подачи заготовок на позицию обработки | 1972 |
|
SU616112A1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2015 |
|
RU2604356C1 |
| КОДОИМПУЛЬСНЫЙ СЕЙСМОИСТОЧНИК | 2011 |
|
RU2457509C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРОМАГНИТНОГО РЕЛЕ С ЗАМЫКАЮЩЕЙ КОНТАКТНОЙ ПАРОЙ | 1993 |
|
RU2071615C1 |
| Электромагнитный фильтр | 1983 |
|
SU1142140A1 |

Изобретение относится к электротехнике, к электромагнитным приводам, которые могут быть в составе коммутационных аппаратов и в других электромагнитных системах, в которых требуется получить большой ход движения якоря. Технический результат состоит в увеличении диапазона движения якоря, повышении зазора между подвижным и неподвижным контактом, повышении кинетической энергии якоря в процессе движения. Неподвижные электромагниты (1, 2, 3, 4, 5) расположены один за другим в осевом направлении. Каждый электромагнит снабжен подвижным якорем, соответственно (6, 7, 8, 9 и 10). Количество электромагнитов и якорей зависит от величины требуемого зазора между последним, по ходу движения якорей, электромагнитом и его якорем. Подвижные якоря (6, 7, 8, 9, 10) электромагнитов установлены по отношению к каждому электромагниту с зазором, различающимся на величину nδ, где δ - зазор первого по ходу движения якоря, n - множитель, имеющий номер электромагнита, к которому относится тот или иной якорь. Все соседние якоря с двух сторон соединены между собой плоской V-образной пружиной (11, 12, 13, 14 и 15). Электромагниты снабжены обмотками возбуждения (16, 17, 18, 19, 20). Все электромагниты жестко соединены между собой общим каркасом из продольных немагнитных планок, охватывающих с торцов всю систему. Между якорем и соответствующим электромагнитом установлены возвратные пружины. Каждый электромагнитный привод снабжен нормально-открытым контактом. Неподвижные контакты сочленены с планками, а подвижные контакты - с якорями. Расстояние между контактами различается на величину nδ. Каждый привод снабжен нормально-замкнутыми контактами. 3 з.п. ф-лы, 8 ил.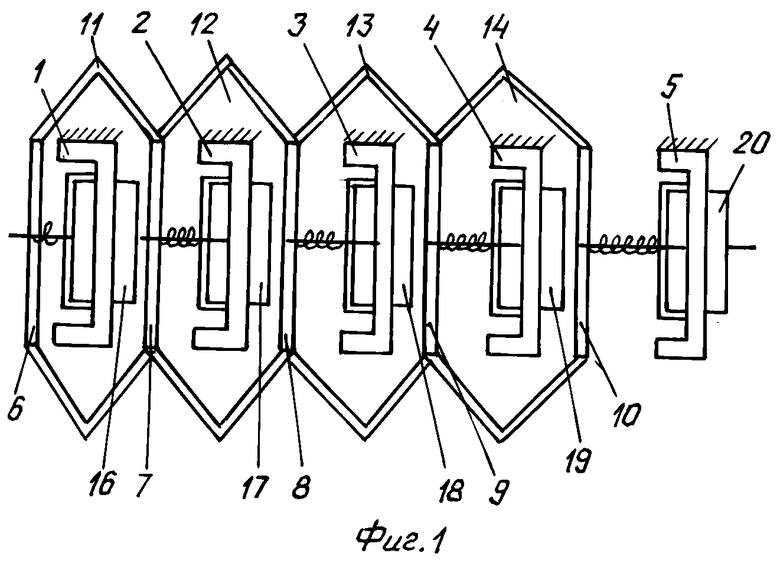
1. Электромагнитный аппарат с поступательным движением якоря, содержащий расположенные один за другим в осевом направлении электромагниты, подвижный якорь, обмотки возбуждения электромагнитов, включенные параллельно и согласно от системы электропитания, систему нормально-замкнутых и нормально-разомкнутых контактов, отличающийся тем, что каждый электромагнит снабжен индивидуальным якорем, зазор между якорем и каждым последующим по направлению хода движения якорей электромагнитом устанавливают равным nδ, где δ - это зазор между первым якорем и первым электромагнитом, n - множитель, равный номеру электромагнита, к которому относится тот или иной якорь, все соседние якоря с двух сторон соединены между собой плоской V-образной пружиной, причем все электромагниты снабжены нормально-открытыми и нормально-замкнутыми контактами.
2. Электромагнитный аппарат по п.1, отличающийся тем, что все обмотки возбуждения электромагнитов соединены с системой электропитания через общий включатель.
3. Электромагнитный аппарат по п.1, отличающийся тем, что каждая последующая обмотка возбуждения электромагнита соединена с системой электропитания с помощью нормально-открытого контакта от предыдущего, по ходу движения якоря, электромагнита.
4. Электромагнитный аппарат по п.1, отличающийся тем, что каждая обмотка возбуждения электромагнита соединена с цепью электропитания с помощью нормально-замкнутого контакта электромагнита, расположенного по ходу движения якорей.
| ЕР 20081207 A1, 22.07.2009 | |||
| DE 19825732 A1, 04.02.1999 | |||
| US 4697164 A, 29.09.1987 | |||
| US 3017546 A, 16.01.1962 | |||
| US 3488614 A, 06.01.1970 | |||
| US 3219854 A, 23.11.1965 | |||
| US 5422617 A, 06.06.1995 | |||
| Линейный дискретный электропривод | 1986 |
|
SU1605297A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU985893A1 |
| RU 2001489 C1, 15.10.1993 | |||
| Шаговый электродвигатель | 1986 |
|
SU1410220A1 |
| Линейный шаговый двигатель | 1984 |
|
SU1192060A1 |
| Электромагнитное устройство | 1980 |
|
SU991960A3 |
| Линейный шаговый электродвигатель | 1990 |
|
SU1767639A1 |
| ТЯГОВЫЙ ЦЕПНОЙ ЭЛЕКТРОМАГНИТ | 2001 |
|
RU2217827C2 |

