Изобретение относится к электротехнике и может быть использовано для линейного перемещения, в частности узлов гидроаппаратуры в цифровых системах автоматического регулирования,
Цель изобретения - повышение быстродействия и надежности путем исключения трения,
На чертеже представлен электропривод, разрез.
Электропривод состоит из электромагнитов Г, в кольцевых расточках которых размещены обмотки 2. Число электромагнитов 1 может соответствовать, например, числу двоичных раз- радов. Первьй электромагнит 3 неподвижен, а остальные связаны с ним последовательно с помощью упругих ра- диальных упоров 4. Взаимное перемещение электромагнитов 1 ограничено ограничителями хода, представляющими собой шарики 5, завальцованные в соседних электромагнитах и охваченные скобами 6, Величина взаимного смещения двух соседних корпусов hj, т.е. ход электро 1агнита, определяется разностью двух размеров: ширины паза скобЫ-6 и суммы двух диаметров шари- ков 5, которые могут быть выбраны так, что ходы электромагнитов двоично взвешены, т,е,
hg
h
2h
г
Ьп - 2hf,.
Якорь 7 последнего электромагнита 8 контактирует с выходным толкателем 9, подпружиненным относительно непод- вижного электромагнита 3 пружиной 10.
Выходной толкатель связан с управляемым органом 11. Обмотки 2 подключены к блоку 12 управления.
В исходном положении под действием пружины 10 все электромагниты находятся в раскрытом положении. При включении какой-либо обмотки 2 каждый соседний электромагнит, являющийся
5
0
5 О 5 0
5
0
5
якорем для включенного, перемещается до соприкосновения соответствующих шариков 5. При этом перемещаются все вышестоящие электромагниты, якорь и, следовательно, выходной толкатель 9 на величину выбранного зазора h{ с учетом передаточного отношения. При включении одной обмотки 2 толкатель 9 перемещается на величину соответствующего хода и т.д. При отклю- НИИ какого-либо электромагнита его якорь под действием пружины 10 возвращается в исходное положение и вы- ходной толкатель 9 перемещается в обратном направлении на соответствующую величину. А так как ходы электромаг - нитов могут быть дВоичнЬ взвешены, выходной толкатель 9, воздействующий на управляемьй орган 11, может совер- шать ход от О до 2.h, -l.c шагом h, где п - число двоичных разрядов.
В предлагаемой конструкции отсутствует трение в подвижных элементах электромагнитов, это увеличивает быстродействие и надежность устройства.
Отсутствие трения позволяет уменьшить величину обмоток при сохранении того же тягового усилия, что также снижает массу подвижных частей, а - следовательно, увеличивает быстродействие привода. Формула изобретения
Линейный дискретный электропривод,, содержащий размещенные вдоль одной Оси электромагниты, крайний из которых выполнен с плоским якорем, а якорем каждого другого является сосед- НИИ электромагнит, внутри электромаг- нитбв установлен подвижный шток, подпружиненный пружиной относительно об щего неподвижного корпуса, причем плоский якорь и все электромагниты последовательно сочленены с противоположных сторон ограничителями хода, отличающийся тем, что, с
5 16052976
целью повышения быстродействия и на- виде упругого радиа.пьного упора,
дежности путем исключения трения,жестко соединенного с сочленяемыми
крайний со стороны пружины электро-элементами, причем упругие радиальные
магнит жестко соединен с общим корпуупоры чередуются с остальными ограни-:
сом, а один из ограничителей хода i чителями хода вдоль оси с обеих сто-
каждой сочленяемой пары выполнен врон.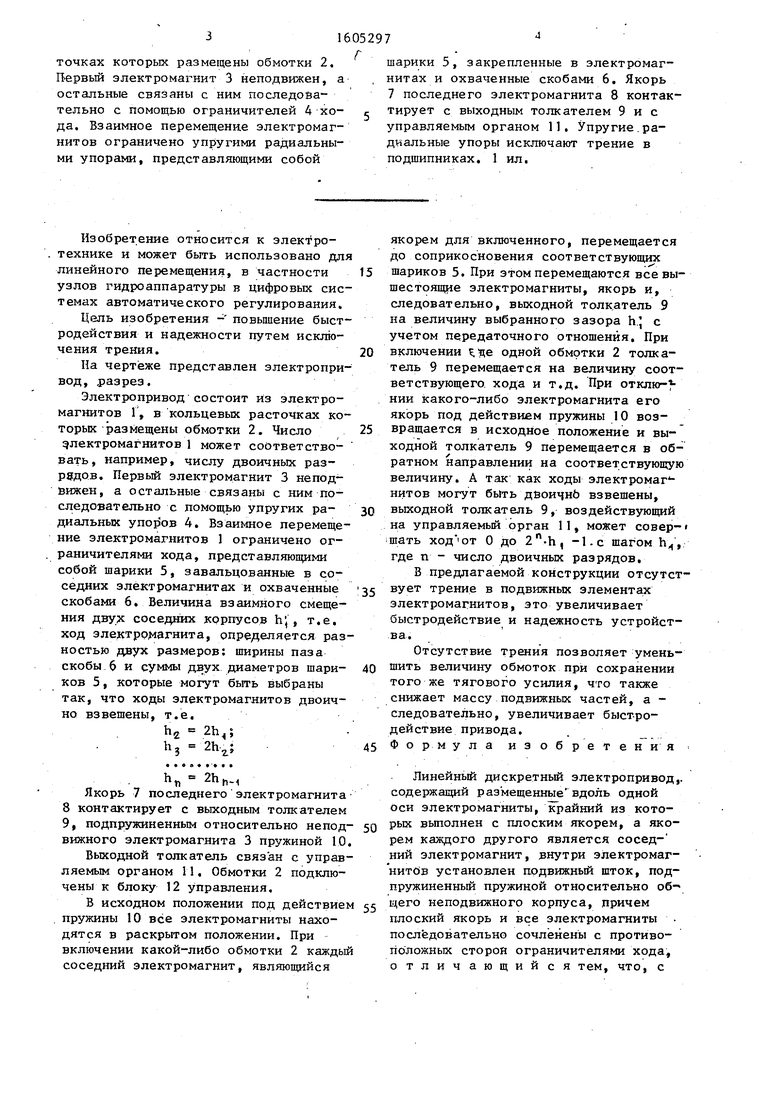
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ДЛЯ ГИДРОУПРАВЛЯЕМОЙ ТОПЛИВНОЙ ФОРСУНКИ | 2011 |
|
RU2541483C1 |
| Электромагнитный привод | 1984 |
|
SU1227832A1 |
| Поляризованный электромагнит | 1981 |
|
SU1065895A1 |
| Цифровой привод | 1990 |
|
SU1742529A2 |
| Линейный дискретный электропривод | 2022 |
|
RU2791263C1 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ МАКСИМАЛЬНЫЙ РАСЦЕПИТЕЛЬ | 1993 |
|
RU2039389C1 |
| Электромеханическое сцепление | 1988 |
|
SU1606772A1 |
| Устройство управления давлением сжатого воздуха с приводом от линейного актуатора | 2021 |
|
RU2767568C1 |
| Привод регулирующего органа ядерного реактора | 1984 |
|
SU1227035A1 |
| ЭЛЕКТРОМАГНИТ ПРИВОДА ЭЛЕКТРОУПРАВЛЯЕМОГО КЛАПАНА | 1995 |
|
RU2101597C1 |
Изобретение относится к электротехнике, автоматическому управлению и может быть использовано для линейного перемещения, в частности узлов гидроаппаратуры, в цифровых системах автоматического регулирования. Цель - повышение быстродействия и надежности путем исключения трения. Устройство состоит из электромагнитов 1 по числу двоичных разрядов, в кольцевых расточках которых размещены обмотки 2. Первый электромагнит 3 неподвижен, а остальные связаны с ним последовательно с помощью ограничителей 4 хода. Взаимное перемещение электромагнитов ограничено упругими радиальными упорами, представляющими собой шарики 5, закрепленные в электромагнитах и охваченные скобами 6. Якорь 7 последнего электромагнита 8 контактирует с выходным толкателем 9 и управляемым органом 11. Упругие радиальные упоры исключают трение в подшипниках. 1 ил.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 0 |
|
SU393481A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU985893A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
