Область техники, к которой относится изобретение
Настоящее изобретение относится к системам определения режима расхода топлива водителем транспортного средства и, в частности, к устройству оценки режима расхода топлива водителем транспортного средства согласно преамбуле пункта 1 формулы изобретения.
Уровень техники
При управлении тяжелыми транспортными средствами, такими как грузовики, автобусы и т.п., экономические показатели транспортного средства со временем приобрели повышенное влияние на доходность бизнеса, в котором используется транспортное средство. За исключением затрат на приобретение транспортного средства наибольшими позициями расходов на транспортное средство являются затраты на топливо и техническое обслуживание. Эти затраты часто связаны между собой, то есть транспортное средство, которое используется с большой нагрузкой, как следствие, потребляет больше топлива и подвергается большему износу с повышенными затратами на обслуживание. Существующая проблема для компаний, использующих тяжелые транспортные средства в своей работе, состоит, тем не менее, в том, что трудно установить, насколько большая часть потребления топлива транспортным средством и износа вытекает, например, из беспечного вождения и насколько большая часть является результатом неблагоприятных условий дорожного движения, таких как чрезвычайно холмистый рельеф земли и/или городская среда с интенсивным движением.
Следовательно, существует необходимость в системе для установления способности водителя водить транспортные средства способом, экономически эффективным в отношении расхода топлива.
В международной патентной заявке WO 00/07150 раскрыта система и способ для показа водителю, как экономически эффективно вести транспортное средство. Например, сила торможения или разгон и замедление могут быть измерены, чтобы оценить, ведет ли водитель транспортное средство благоприятным способом. Система содержит средство типа маятника, чтобы определять, движется ли транспортное средство вперед или нет, движется ли транспортное средство вверх по склону холма, вниз по склону холма или по горизонтальной поверхности, а также разгоняется ли транспортное средство, замедляется или движется с постоянной скоростью. Эта информация может объединяться, чтобы давать водителю предложения и совет в соответствии с множеством ранее определенных соответствующих режимов вождения. Хотя раскрытая система стремится предложить водителю способ, которым транспортное средство можно вести экономически эффективно, система содержит недостатки, состоящие в том, как эта оценка выполняется, и, следовательно, существует необходимость в улучшенной процедуре оценки режима вождения водителя с точки зрения расхода топлива.
Сущность изобретения
Задача настоящего изобретения состоит в обеспечении устройства для определения режима расхода топлива водителем транспортного средства в ситуации дорожного движения, которое решает описанную выше проблему. Решение этой и других задач достигается в соответствии с настоящим изобретением с помощью устройства, соответствующего пункту 1 формулы изобретения.
В соответствии с настоящим изобретением обеспечивается устройство для определения режима расхода топлива водителем транспортного средств, по меньшей мере, для первого участка маршрута движения транспортного средства, в котором упомянутый участок является, по меньшей мере, одним спуском по склону холма. Устройство содержит средство для определения, находится ли транспортное средство на упомянутом первом участке, средство, которое, когда транспортное средство находится на упомянутом участке, непрерывно, или с некоторыми, или заранее определенными интервалами определяет, предпринимает ли водитель транспортного средства первую меру, когда упомянутая первая мера является мерой по отбору положительного вращающего момента двигателя,
- средство для определения результата измерения действия упомянутой первой меры на упомянутом участке и средство для определения на основе упомянутого результата измерения действия значения параметра, представляющего режим расхода топлива, начиная с определения заранее определенных критериев.
Преимущество здесь заключается в том, что каждый раз, когда транспортное средство спускается по склону холма, водитель может вести себя определенным образом, то есть способность водителя экономически эффективным способом вести транспортные средства на спуске по склону холма может быть оценена правильным образом.
Упомянутое средство для определения, спускается ли транспортное средство по склону холма, может содержать средство для выполнения упомянутого определения посредством определения сопротивления движению транспортного средства. Преимущество при этом состоит в том, что градиент склона холма вместе с весом транспортного средства могут оказывать влияние на определение упомянутого режима расхода топлива, то есть на режим влияет, было ли транспортное средство тяжело загружено или нет. Упомянутое средство для определения того, находится ли транспортное средство на спуске по склону холма, может альтернативно или в дополнение к сказанному содержать, по меньшей мере, одно из устройств следующей группы: уклономер, акселерометр, барометр, навигационная система типа GPS.
Устройство может содержать средство для определения, предпринимает ли водитель транспортного средства на первом упомянутом участке на первом этапе упомянутую первую меру и на втором этапе, вслед за упомянутым первым этапом, вторую меру, являющуюся мерой торможения транспортного средства. Преимущество здесь заключается в том, что водитель транспортного средства, который сначала применяет разгон при спуске по склону холма, а затем должен тормозить на том же спуске по склону холма, может быть "наказан" за такое поведение. Дополнительно, представление времени, в течение которого предпринимались упомянутые соответствующие меры, и/или представление количества энергии, созданной упомянутыми соответствующими мерами, может использоваться, чтобы давать точное определение режима расхода топлива.
Устройство может содержать средство, чтобы, когда второй участок, который находится поблизости или непосредственно следует за упомянутым первым участком, является спуском по склону холма, также учитывать это при определении режима расхода. Например, когда спуск по склону холма сопровождается последующим подъемом по склону холма, отбор положительного вращающего момента двигателя в конце спуска по склону холма может быть оценен "положительно" поскольку это в экономичной манере облегчает транспортному средству последующий подъем по склону холма.
В альтернативном варианте осуществления настоящего изобретения устройство содержит средство для определения, переходит ли транспортное средство от подъема по склону холма к спуску по склону холма, средство, которое во время упомянутого подъема по склону холма и спуска по склону холма непрерывно, или с некоторыми, или заранее определенными интервалами определяет, предпринимает ли водитель транспортного средства упомянутую первую меру, средство для определения первого результата измерения действия упомянутой первой меры при упомянутом подъеме по склону холма и второго результата измерения действия упомянутой первой меры при упомянутом спуске по склону холма и средство для того, чтобы, основываясь на упомянутом результате измерения, определять значение параметра, представляющее режим расхода топлива, начиная с определения заранее определенных критериев.
Преимущество этого варианта состоит в том, что отборы вращающего момента двигателя соответственно до и после вершины холма, образованной упомянутыми вторым и первым участками, могут сравниваться для оценки способности водителя воспользоваться преимуществом предстоящего спуска по склону холма для разгона транспортного средства.
Устройство может содержать средство для передачи упомянутого значения параметра, представляющего режим расхода топлива водителем, чтобы отображать работу средства, установленного в упомянутом транспортном средстве. Преимущество этого варианта состоит в том, что водитель может немедленно принимать сигнал обратной связи в ответ на свое поведение.
Устройство может содержать средство для хранения упомянутой упреждающей способности для множества спусков по склонам холмов. Преимущество этого варианта состоит в том, что, например, может быть определен средний режим управления водителем на определенной дистанции или в течение определенного периода времени. Упомянутые значения параметра, представляющего режим расхода топлива, могут передаваться на удаленный центр контроля. Преимущество этого варианта состоит в том, что владелец парка транспортных средств может централизованно оценивать действия множества водителей транспортных средств.
Устройство может также содержать средство, которое в течение, по меньшей мере, участка непрерывно или с некоторыми интервалами определяет значения параметра, представляющего сопротивление движению транспортного средства и мгновенный расход топлива транспортным средством, и средство, которое на основе упомянутых определенных значений параметров, представляющих сопротивление движению и расход топлива, определяет режим расхода топлива, начиная с определения заранее определенных критериев. Преимущество этого варианта состоит в том, что посредством связи текущего расхода топлива с сопротивлением движению результат измерения способности водителя может сравниваться с соответствующими результатами измерений для других водителей и обеспечивать точное сравнение, независимо от того, вел ли водитель тяжело нагруженное транспортное средство, в то время как другой водитель вел пустое транспортное средство.
Настоящее изобретение также относится к транспортному средству.
Краткое описание чертежей
Фиг. 1 - схематичное изображение системы управления транспортного средства, в которой настоящее изобретение может с успехом быть использовано.
Фиг. 2a-b - пример устройства, соответствующего настоящему изобретению.
Фиг. 3 - пример способа для определения режима расхода топлива в соответствии с настоящим изобретением.
Фиг. 4 - альтернативный пример способа для определения режима расхода топлива в соответствии с настоящим изобретением.
Фиг. 5 - дополнительный альтернативный пример способа для определения режима расхода топлива в соответствии с настоящим изобретением.
Фиг. 6 - альтернативный пример устройства, соответствующего настоящему изобретению.
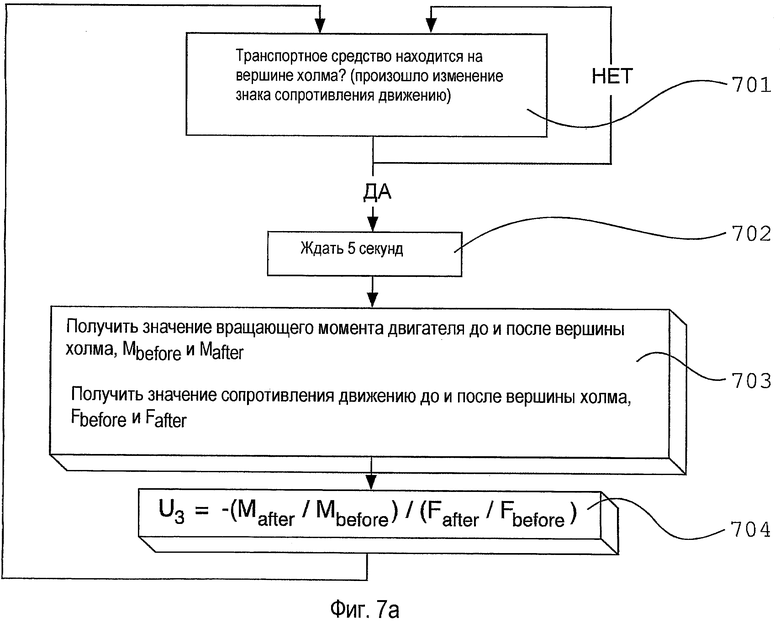
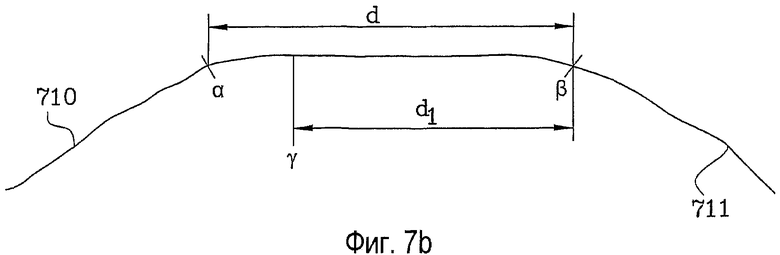
Фиг. 7a-b - еще один другой альтернативный пример процедуры определения режима расхода топлива в соответствии с настоящим изобретением.
Фиг. 8 - дополнительный альтернативный пример устройства, соответствующего настоящему изобретению.
Подробное описание примеров вариантов осуществления
В настоящем описании термин "внутренние датчики транспортного средства" означает датчики, которые получают данные только от относительных перемещений транспортного средства, то есть изменений перемещения от одного момента времени до другого, и которые не используют информацию от внешних систем, таких как системы определения местоположения или картографические базы данных. Такие внутренние датчики транспортного средства могут, например, состоять из датчиков поперечного ускорения, то есть датчиков, вырабатывающих сигналы, с помощью которых может быть определена скорость изменения скорости транспортного средства в боковом направлении, например, чтобы определить, подвергается ли транспортное средство риску опрокидывания из-за выполнения водителем неосторожного маневра. Дополнительно, датчики могут содержать датчики скорости колес, то есть датчики для создания сигналов, с помощью которых могут определяться скорость вращения колес и пройденное расстояние, датчики угла поворота, создающие сигналы, с помощью которых может быть определен угол поворота управляемых колес относительно продольной оси транспортного средства, и средство датчика для передачи сигналов, по которым может быть вычислена угловая скорость рыскания, то есть насколько быстро транспортное средство выполняет повороты.
При концепции с отбором вращающего момента двигателя в настоящем описании подразумевается, что движущая сила двигателя транспортного средства обеспечивает движение транспортного средства вперед. Отбор положительного вращающего момента двигателя имеет тот смысл, что двигатель, за счет подачи топлива и включенной соответствующей передачи, создает силу, которая стремится двигать транспортное средство вперед в направлении движения транспортного средства. Напротив, отбор отрицательного вращающего момента двигателя имеет смысл торможения двигателем с включенной передачей, которое стремится уменьшить скорость транспортного средства в направлении движения.
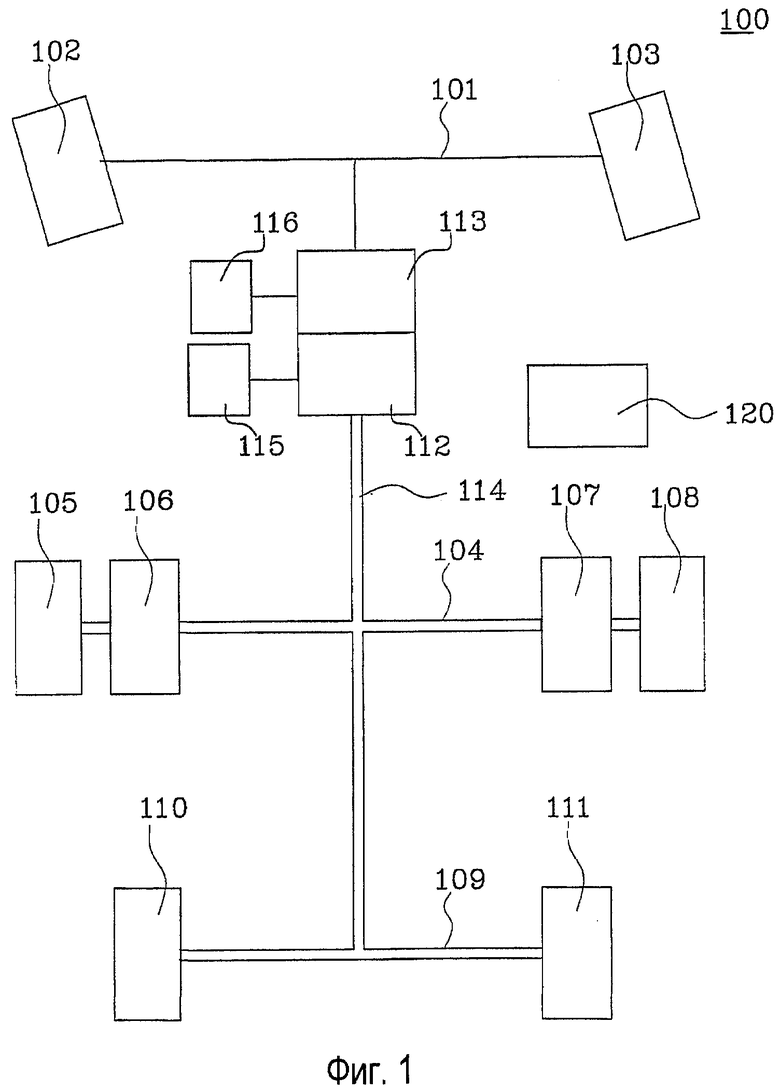
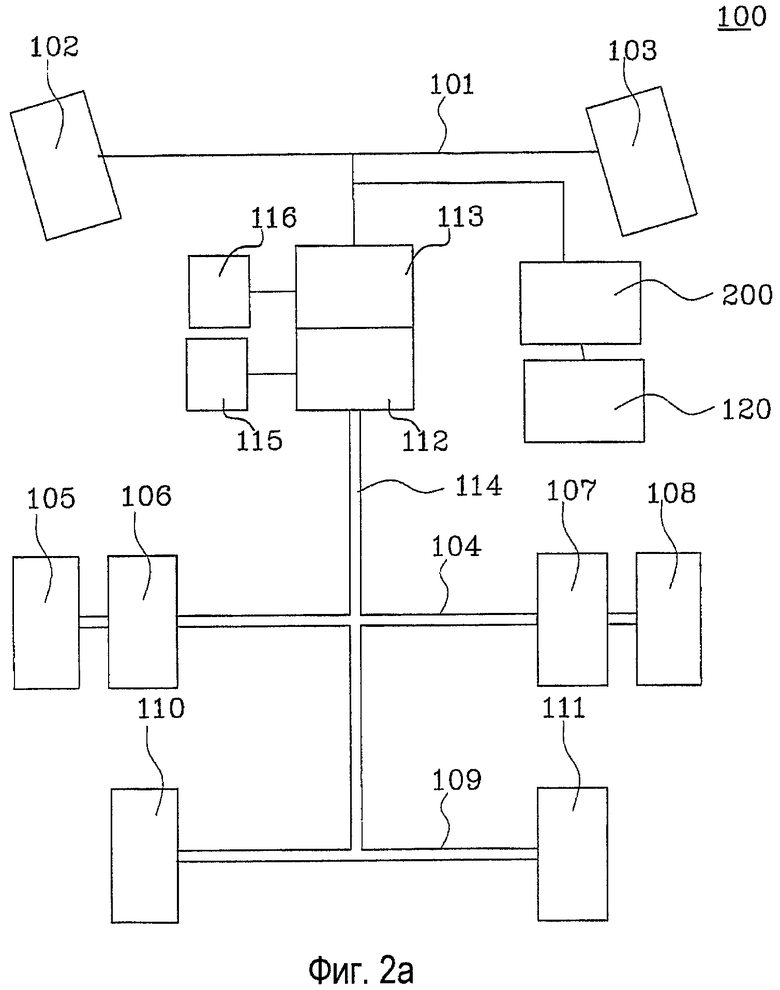
На фиг. 1 схематично показана система управления для транспортного средства 100, вместе с которой может использоваться настоящее изобретение. Транспортное средство 100 содержит передний вал 101 с управляемыми колесами 102, 103, вал 104 заднего привода с ведущими колесами 105-108 и задний вал 109 уравнителя давления с колесами 110, 111. Дополнительно, транспортное средство 100 содержит двигатель 113, соединенный с коробкой 112 передач, которая приводит в действие ведущий вал 104 с помощью выходного вала 114 коробки передач.
Коробка 112 передач и двигатель 113 управляются блоками 115, 116 управления соответственно, которые управляются основным блоком 117 управления. Система 116 управления двигателем (EMS) управляет функциями двигателя транспортного средства, которые могут содержать, например, инжекцию топлива и торможение двигателем. Управление основано на ряде входных сигналов, которые могут состоять из сигналов от органов управления дроссельной заслонкой (не показана) (например, положение педали акселератора), датчика скорости и системы управления тормозами. Система 115 управления коробкой передач (CMS) управляет функциями передачи, для которых, при использовании автоматической коробки передач, переключение скоростей может управляться на основе входного сигнала от датчиков скорости, а при ручном переключении скоростей переключение может управляться входным сигналом от переключателя передач (рычаг переключения передач).
Дополнительно, транспортное средство содержит систему управления тормозами (BMS) с блоком 120 управления торможением, которая управляет функциями торможения транспортного средства, такими как автоматическое вычисление груза, так чтобы определенное положение педали всегда могло давать в результате один и тот же тормозной эффект, независимо от груза. Блок управления торможением управляет различными тормозными системами транспортного средства, например замедлителем и другими вспомогательными тормозными системами, горным тормозом и основным тормозом, и посылает управляющие сигналы на модули системы (не показаны), разбросанные на шасси, которые используют электрические управляющие сигналы и, например, регулируют давление в тормозной системе.
Транспортное средство типа, показанного на фиг. 1, обычно содержит, помимо вышеупомянутого, множество дополнительных блоков управления, см., например, патентную заявку WO 01/86459 A1. Поэтому описанные выше блоки управления являются простыми примерами того, что может иметься в транспортном средстве. Как понимают специалисты в данной области техники, два или более из описанных выше блоков управления могут, конечно, быть объединены в одном едином блоке управления.
В транспортном средстве типа, показанного на фиг. 1, крайне желательно, чтобы водитель при вождении транспортного средства, насколько возможно, прогнозировал ситуацию, чтобы избегать ненужных торможений и разгонов, например, которые были вызваны слишком короткой дистанцией до находящегося впереди транспортного средства, или чтобы водитель требовал разгон на вершине холма или в начале последующего спуска по склону холма, чтобы затем более или менее немедленно тормозить при спуске по склону холма. Значительно лучше, с точки зрения износа, так же как и с точки зрения расхода топлива, если водитель, насколько возможно, воспользуется преимуществом, даваемым энергией, хранящейся в транспортном средстве, и не будет расходовать ее, излишне используя тормоза. Идеальное управление транспортным средством водителем в различных ситуациях, однако, в большой степени меняется, и сегодня очень трудно после окончания поездки решить, является режим вождения водителя хорошим или плохим. Если расход, который транспортное средство имело, пройдя некоторое расстояние, очень низкий, то обычно это можно с высокой уверенностью рассматривать как хороший пример для водителя и считать, что транспортное средство управлялось экономически выгодно. Если, однако, расход большой, то может быть трудно определить, является ли высокий расход результатом неэкономичной и/или агрессивной манеры вождения или транспортное средство управлялось тяжело загруженным, в условиях городского движения или холмистой местности и поэтому имело очень высокий расход топлива также при очень экономичном режиме вождения.
Настоящее изобретение обеспечивает устройства для оценки водителя транспортного средства с точки зрения режима расхода топлива, в которых способность водителя вести транспортное средство экономичным способом может быть оценена точно, независимо от того, в какой среде двигалось транспортное средство, и независимо от того, было ли транспортное средство тяжело загруженным или пустым. Соответственно, настоящее изобретение дает возможность владельцу транспортного средства оценивать, управлялось ли транспортное средство удовлетворительным образом, то есть экономично, а также справедливо сравнивать различных водителей различных транспортных средств. Первый вариант осуществления изобретения объясняется со ссылкой на фиг. 2a-b, где на фиг. 2a транспортное средство, показанное на фиг. 1, снабжено устройством 200, соответствующим первому варианту осуществления изобретения.
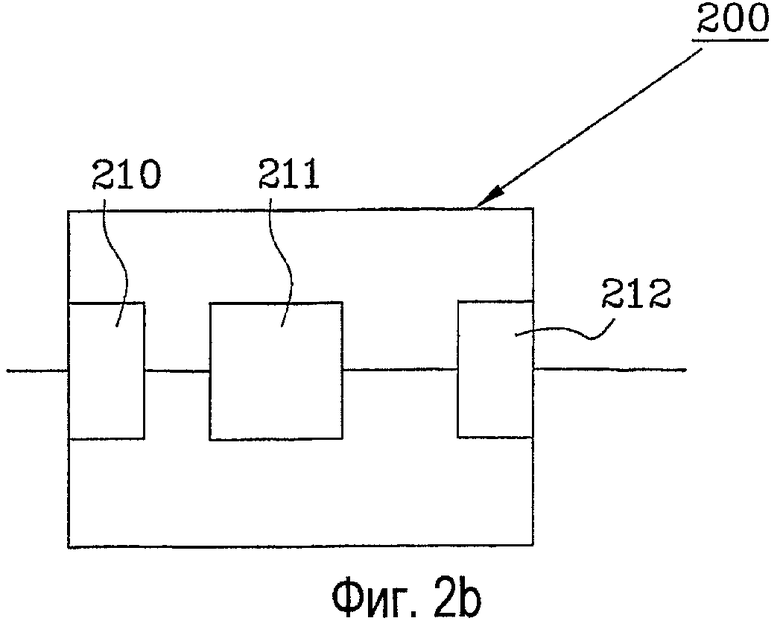
Устройство 200 показано более подробно на фиг. 2b и содержит средство 210 для приема сигналов, представляющих вращающий момент двигателя, трение двигателя, полное передаточное число, радиусы ведущих колес, ускорение и массу транспортного средства, и, когда нужно, для преобразования этих сигналов в формат, приспособленный к блоку 201 обработки данных, установленному в устройстве 200. Упомянутое средство 210 может состоять, например, из соответствующей точки подключения для каждого желаемого сигнала согласно вышесказанному, когда различные сигналы могут иметь различные интерфейсы. Эти сигналы могут быть получены либо непосредственно от датчика, создающего соответствующий сигнал, либо, альтернативно, например, от любого из упомянутых выше блоков управления. Устройство может, поэтому, содержать средство, такое как аналого-цифровые (A/D) преобразователи или приемники для приема по беспроводной связи переданных сигналов датчиков для преобразования сигналов из различных форматов в общий формат, приспособленный к упомянутому блоку 211 обработки данных. Альтернативно, упомянутое средство 210 может содержать подключение к шине данных для приема сигналов датчиков с помощью шины данных, например, по протоколу любого из форматов шины данных CAN (локальная сеть контроллеров), TTCAN или FlexRay, где сигналы датчиков могут быть преобразованы в общий формат передачи данных. Сигналы датчиков могут быть предоставлены в желательном формате шины данных либо непосредственно средством датчика, либо соответствующим блоком управления. Например, раскрытые выше блок управления двигателем и блок управления коробкой передач могут обеспечивать, по меньшей мере, часть упомянутых сигналов. Когда упомянутый блок 211 обработки данных принял сигналы датчика, блок обработки может выполнять вычисления согласно изобретению в соответствии с тем, что объясняется ниже. Блок 211 обработки данных может состоять, например, из процессора, который управляется посредством рабочих команд, таких как компьютерная программа, написанная на соответствующем языке программирования и запоминаемая в запоминающем средстве, встроенном или подключенном к процессору. Упомянутое запоминающее средство может состоять, например, из одного или более устройств из группы: ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое программируемое постоянное запоминающее устройство), флэш-память, EEPROM (электрически стираемое программируемое постоянное запоминающее устройство). Устройство 200 может состоять из блока обработки данных и интегрированных в него запоминающего устройства и интерфейса шины для шины данных упомянутого выше типа и поэтому может быть построено очень компактным. Устройство 200 дополнительно содержит выходное средство 212 для вывода обработанных данных, например, на дисплей, установленный в кабине водителя, или на систему звукового воспроизведения, такую как громкоговоритель, чтобы постоянно обеспечивать водителя обратной связью о его/ее поведении с точки зрения расхода топлива.
Зная существующий в данное время для транспортного средства вращающий момент двигателя, трение двигателя, общее передаточное число, радиусы ведущих колес, ускорение и массу транспортного средства, то есть параметры, которые блок 211 обработки данных может вычислять посредством сигналов, обеспечиваемых, как сказано выше, или, альтернативно, получать непосредственно как значения параметров, например, от соответствующего блока управления, блок 211 обработки данных может вычислять общую сумму результирующей внешних сил, создающих сопротивление качению, аэродинамического сопротивления и силы тяжести, действующей на транспортное средство. Эта сумма в последующем описании и пунктах формулы изобретения упоминается как сопротивление движению. Для известных моделей сопротивление качению, а также аэродинамическое сопротивление, которые могут храниться в запоминающем устройстве, присоединенном к блоку обработки данных, например, в форме таблицы или уравнений для вычисления, вклад силы тяжести в сопротивление движению может быть оценен исходя из вычисленного сопротивления движению, то есть может быть описан наклон дороги, посредством чего фактический склон шоссе относительно горизонтальной плоскости может быть определен в каждой заданной точке по времени. Зная скорость транспортного средства, отбираемый вращающий момент двигателя, конфигурацию транспортного средства и других сопутствующих данных, которые обычно также доступны по шине данных транспортного средства, вес транспортного средства может быть вычислен для использования в соответствии со сказанным выше. Изучая изменения во времени уклона (склона), холмистость дороги может также быть определена и дорога может быть разделена на участки с различными уклонами. Это может быть выполнено с помощью расстояния или времени как основы для измерения, чтобы оценить холмистость, причем расстояние легко может быть вычислено посредством скорости транспортного средства или радиуса ведущих колес в комбинации с датчиком вращения.
Соответственно, устройство 200 может использоваться для получения хорошего представления об уклоне дороги, по которой движется транспортное средство. По меньшей мере, в части примеров вариантов осуществления настоящего изобретения, описанных ниже, для вычисления уклона дороги для транспортного средства могут использоваться не сопротивление движению, а другие способы, например уклономер, акселерометр, барометр или навигационная система типа GPS.
Дополнительный пример того, как может быть определен уклон, дается в шведской патентной заявке 0600370-1 "Metod for bestamning av lutningen for en vag (на английском языке: Method for estimating the inclination of a road)", зарегистрированной 20 февраля 2006 г., которая описывает устройство для оценки уклона дороги, по которой движется транспортное средство. Устройство содержит средство создания взвешенной оценки уклона, действующее на основе значений параметров, по меньшей мере, от двух источников, в котором устройство содержит средство определения соответствующего воздействия упомянутых значений параметров на упомянутую взвешенную оценку уклона. Упомянутое взвешивание выполняется с возможностью управления изменениями надежности значений параметров. Взвешенная оценка может выполняться, используя статистический фильтр, такой как фильтра Калмана или расширенный фильтр Калмана.
Используя сопротивление движению согласно сказанному выше и/или другую оценку уклона, можно определить различные способы измерения способности водителя вести транспортное средство в режиме экономичного расхода топлива, некоторые примеры которых приводятся ниже.
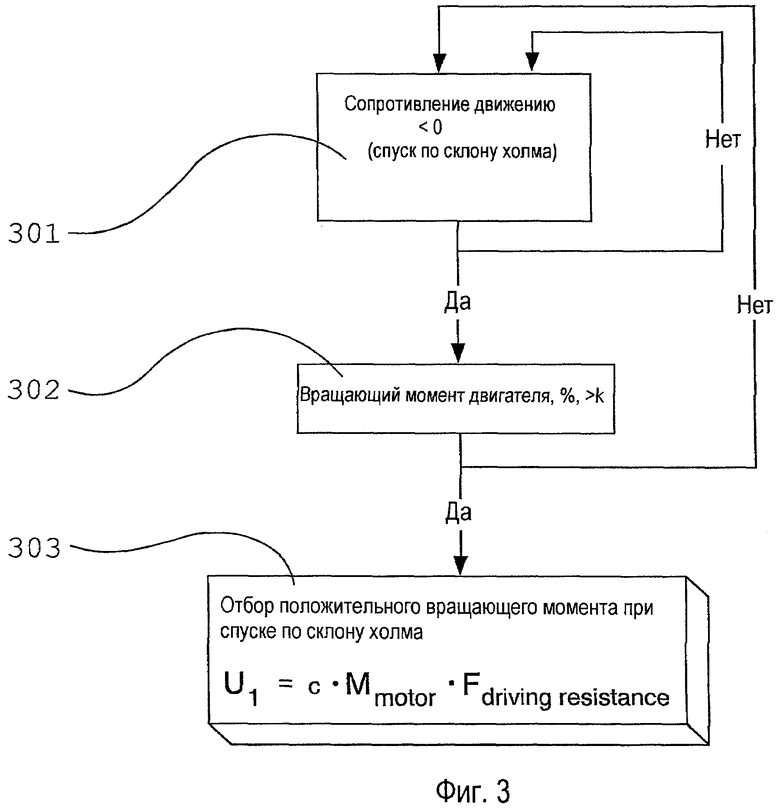
На фиг. 3 представлен первый способ, соответствующий настоящему изобретению, для определения части времени или расстояния, когда отбор вращающего момента двигателя был положительным при спуске по склону холма, которая предпочтительно связывается с уклоном дороги и массой транспортного средства с целью вознаградить водителя, который отпускает педаль акселератора при спуске по склону холма. Это иллюстрируется способом, показанным на фиг. 3, на котором блок 211 обработки данных на этапе 301 определяет, является ли сопротивление движению отрицательным, то есть находится ли транспортное средство на спуске холма. Если определено, что транспортное средство спускается по склону холма, процесс переходит к этапу 302, где определяется, имеет ли транспортное средство отбор положительного вращающего момента двигателя, который больше, чем параметр k, где k, например, может быть определено как процент от максимального вращающего момента, который может обеспечивать двигатель. Значение k может быть определено таким образом, чтобы изменяться с изменением уклона, то есть чем круче спуск по склону холма, тем меньше k, поскольку более крутой уклон обеспечивает большую вероятность разгона автомобиля путем преобразования потенциальной энергии в кинетическую. Если на этапе 302 определяется, что фактический отбор положительного вращающего момента двигателя <k, процедура возвращается к этапу 301, тогда как в противном случае она переходит к этапу 303. Зная массу транспортного средства и уклон дороги (например, текущее сопротивление движению согласно сказанному выше), оценка того, насколько неправильным является поведение водителя, может быть вычислена согласно следующему выражению:

где U 1 представляет заключение, которое показывает, насколько неправильным является поведение водителя, c - константа. Чем выше значение U 1, тем хуже режим, в котором водитель вел транспортное средство вниз по склону холма, то есть водитель не воспользовался преимуществом преобразования энергии, хранящейся в транспортном средстве. Выполняя процедуру, показанную на фиг. 3, с некоторыми интервалами, с заранее определенными интервалами или непрерывно, в то время как транспортное средство спускается по склону холма, может быть получен полный результат измерения для упомянутого спуска по склону холма, например, измеряя, сколько времени отбирался положительный вращающий момент двигателя по отношению к общему времени, которое транспортное средство спускалось по склону холма, то есть очень короткий отбор вращающего момента может оцениваться как значительно более уместный, чем более длительный отбор вращающего момента. Альтернативно, процесс повторяется с некоторыми или заранее определенными интервалами, посредством чего значение U 1 запоминается каждый раз, когда достигается самый нижний квадрат на фиг. 1, что, следовательно, имеет тот результат, что количество зарегистрированных значений U 1 относительно ссылочного параметра, которое подсчитывается для всего спуска по склону холма, представляет ту часть спуска по склону холма, где происходил отбор положительного вращающего момента двигателя. Процесс, показанный на фиг. 3, повторяется для каждого спуска по склону холма, по которому движется транспортное средство, посредством чего среднее значение полученных значений U 1 может использоваться для оценки, насколько умелым был водитель в использовании склонов холма при спуске вместо того, чтобы разгонять транспортное средство во время движения транспортного средства.
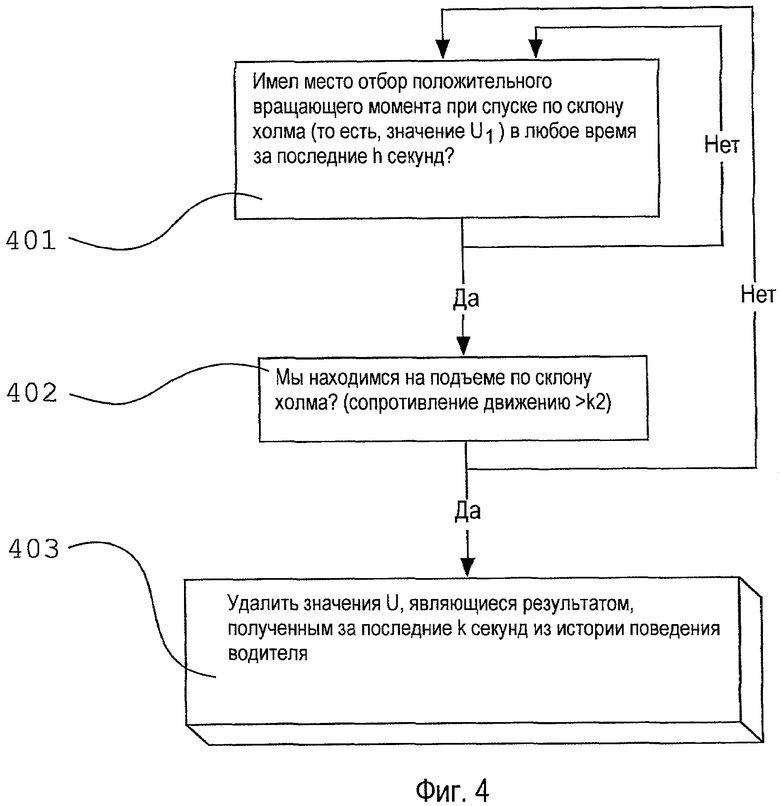
На фиг. 4 показан дополнительный способ, которым может быть выполнено устройство в соответствии с первым вариантом осуществления настоящего изобретения, который основан на способе, показанном на фиг. 3, и который, помимо определения отбора положительного вращающего момента двигателя при спуске по склону холма за счет веса транспортного средства и присутствующего уклона (сопротивление движению), также учитывает будущие уклоны дороги, то есть уклон дороги, следующий непосредственно после спуска по склону холма, так чтобы водитель, который, в конце концов, применил разгон при спуске по склону холма, но только из-за предстоящего подъема по склону холма, чтобы таким образом преодолеть подъем по склону холма в экономичной манере, не был без нужды наказан. Способ, показанный на фиг. 4, начинается на этапе 401, на котором блок 211 обработки данных определяет, был ли отбор вращающего момента двигателя положительным при спуске по склону холма в любое время в течение последних x секунд, то есть было ли в любое время в течение последних x секунд зарегистрировано значение U 1 согласно фиг. 3. Если это имеет место, процесс переходит к этапу 402, где определяется, находится ли транспортное средство на подъеме по склону холма, то есть является ли сопротивление движению положительным. В этом случае возможные значения U 1, которые присутствовали в течение последних x секунд, например 10 секунд, удаляются на этапе 403, так как режим применения разгона на спуске по склону холма мог быть мотивирован предстоящим подъемом по склону холма. Таким способом избегают того, что водитель при оценке неправильно "наказывается", несмотря на показанную им способность планировать заблаговременно. Однако, если на этапе 402 определено, что транспортное средство не находится на подъеме на склоне холма, отрицательное значение U 1 для водителя не удаляется.
Кроме того, как описано выше, если определение, был ли положительным отбор вращающего момента двигателя, было выполнено на спуске по склону холма, устройство может, в соответствии с первым вариантом осуществления настоящего изобретения, в дополнение или как альтернатива процедуре, показанной на фиг. 4, быть выполнено с возможностью определения части времени или расстояния при спуске по склону холма, когда торможение с помощью тормозной системы было потребовано вслед за отбором положительного вращающего момента двигателя, введенным из-за веса транспортного средства и уклона дороги шоссе раньше на том же самом спуске на склоне холма. Таким образом, неправильное поведение, которое водитель демонстрирует, применяя разгон при спуске на склоне холма, смягчается, если водитель избегает в дальнейшем торможения при спуске на склоне холма, на котором он ранее применил разгон. Наоборот, водитель может быть дополнительно наказан, по сравнению со способом, показанным на фиг. 3, если транспортное средство при одном и том же спуске по склону холма подверглось как разгону, так и торможению.
Оценку, как указано выше, полезно провести для каждого начатого спуска по склону холма. На фиг. 5 показан способ выполнения описанной оценки. Способ начинается с этапа 501, где определяется, находится ли транспортное средство на спуске на склоне холма. Если это так, процесс переходит к этапу 502, где определяется, разгоняет ли водитель транспортное средство, то есть является ли вращающий момент двигателя >k, или транспортное средство подвергается действию любого из тормозов тормозных систем транспортного средства, или транспортное средство катится свободно. Если транспортное средство не разгоняется и тормоза не включены, процесс возвращается на этап 501. Если транспортное средство ускоряется, процесс продолжается и переходит к этапу 503, где переменная T m считается в прямом направлении согласно T m=T m+1, после чего процедура возвращается на этап 501 и вся процедура продолжается в соответствии со сказанным выше. Если на этапе 502 определено, что тормоза транспортного средства включены, процедура переходит к этапу 504, где определяется, разгонялось ли транспортное средство ранее при том же самом спуске по склону холма, то есть было ли Tm>0. Если это не так, процесс возвращается к этапу 501. Если, однако, определено, что Tm>0, процесс переходит к этапу 505, где переменная T b считается в прямом направлении T b=T b+1, после чего процесс возвращается к этапу 501 и продолжается согласно описанному выше. Когда транспортное средство закончило спуск по склону холма и на этапе 501 определено, что транспортное средство больше не находится на спуске по склону холма, ссылочное значение U 2 для пройденного спуска по склону холма вычисляется на этапе 506. U 2 может быть вычислено следующим образом:
где время разгона представляется значением T m, а время торможения представляется значением T b. При выполнении операций по блок-схеме последовательности выполнения операций, показанной на фиг. 5, с регулярными интервалами, например, каждые 10 мс, подсчитываемое в прямом порядке значение T m, соответствующее T b, будет представлять время, в течение которого транспортное средство подвергалось использованию разгона и имело включенные тормоза соответственно при спуске по склону холма. Когда U 2 было вычислено на этапе 506, T m устанавливается=Tb=0. В отличие от вышесказанного U 2, как предполагается, является настолько высоким, насколько возможно для опытного водителя. Очевидно, что водитель должен избегать использования разгона в течение того времени, пока включены тормоза при спуске по склону холма, что должно привести к U 2=0. Следовательно, нет ничего неправильного в использовании сначала разгона и затем торможения при условии, чтобы либо торможение было очень коротким, либо отбор вращающего момента двигателя был очень коротким. Значение U 2 высокое, когда разность во времени ускорения и времени торможения большая.
Следовательно, этот пример использует время для определения, сколько времени соответственно были включены тормоза и сколько времени использовался разгон. Способ, однако, также содержит и другие пути связи количества времени, которое водитель использовал разгон, с количеством времени, когда водитель включал тормоза, вслед за ситуацией, когда вращающий момент двигателя действовал на одном и том же спуске по склону холма. Например, может быть выполнен энергетический анализ, в котором приложенная энергия (двигателя) делится с энергией торможения для одного и для другого спуска по склону холма. Альтернативно, расстояния, на которых водитель включал тормоза и использовал разгон соответственно могут быть связаны друг с другом.
Выше настоящее изобретение было описано только в связи со спуском по склону холма.
На фиг. 6 показано устройство 600, соответствующее второму примеру варианта осуществления, соответствующего настоящему изобретению. Аналогично устройству, показанному на фиг. 2b, устройство 600 содержит средство 601 для приема сигналов в соответствии со сказанным выше и блок 602 обработки данных для выполнения обработки принятых данных в соответствии с описанным ниже. Устройство 600 также содержит средство 603 для вывода обработанных данных, например, на дисплей или на систему звукового воспроизведения, для образования обратной связи с водителем транспортного средства.
Устройство 600 может, помимо определения, спускается ли транспортное средство по склону холма, также обнаруживать специальные случаи наклона, такие как вершина холмов и впадины. Они определяются изменениями знака в оцененном наклоне.
На фиг. 7a показан пример процедуры для оценки водителя транспортного средства в соответствии со вторым примером варианта осуществления настоящего изобретения. Исследуя изменения в отборе вращающего момента двигателя с точки зрения профиля вертикальной кривой шоссе и связывая их с максимальной точкой вершины холма и его ближайшими окрестностями, водитель, который отпускает педаль акселератора в удовлетворительной степени в соответствии с формой холма, может быть премирован. Вершина холма может обнаруживаться, например, путем обнаружения изменения знака в сопротивлении движению или путем использования других способов определения наклона местности, на которой находится транспортное средство. Точно в тот момент, когда транспортное средство достигает вершины холма, сопротивление движению изменяет знак (с положительного на отрицательный). Посредством непрерывного, или с некоторыми, или заранее определенными интервалами запоминания запроса вращающего момента двигателя и сопротивления движению может быть оценена способность водителя отпускать педаль акселератора на вершинах холмов. Способ, показанный на фиг. 7a, инициируется на этапе 701 путем определения, находится ли транспортное средство наверху холма, то есть произошло ли изменение знака сопротивления движению. Устройство 600 может быть выполнено с возможностью вычисления сопротивления движению один или более раз, например каждые 10 мс. Если определяется, что транспортное средство находится на вершине холма, процесс переходит к этапу 702, где процесс выжидает заранее определенное время, например 5 секунд, согласно чертежу, после чего процесс переходит к этапу 703, где значения параметра вычисляются или собираются для определения вращающего момента, даваемого двигателем до, T before, и после, T after, соответственно вершины холма и сопротивления движению до, F before, и после, F after, соответственно вершины холма. На этапе 704 параметр оценки U 3 затем вычисляется в соответствии с выражением:
Желательно иметь значение U 3 как можно более низким. Из приведенного выражения следует, что водитель должен соответственно разрешать, чтобы вращающий момент после вершины холма был гораздо меньшим, чем вращающий момент до вершины холма, и в еще большей степени, если сопротивление движению после вершины холма намного меньше, чем сопротивление движению до вершины холма, то есть если спуск склона холма крутой, поскольку в этом случае лучше позволить разгонять транспортное средство за счет склона. Отрицательный знак в приведенном выражении используется для удобства, чтобы получить положительное значение для U 3 (знаменатель всегда будет отрицательным, так как вершина холма определяется как изменение знака в сопротивлении движению). Принимая (взвешенное) среднее значение для значений U 3, вычисленных во время поездки, то есть для каждой вершины холма вычисляют способность водителя достаточно отпускать педаль акселератора, может быть оценено среднее поведение водителя на вершинах холмов (альтернативно, процесс, описанный на фиг. 7a, может быть выполнен с возможностью вычисления U 3 так, что это значение вычисляется, только если спуск по склону холма, который следует за вершиной холма, круче определенного порогового значения, то есть если абсолютное значение Fafter превышает определенное значение).
В приведенном выше описании вершина холма устанавливается как точка, в которой сопротивление движению изменяет знак (с положительного на отрицательный). На фиг. 7b показана альтернативная процедура определения точек измерения, когда подъем 710 склона холма переходит в спуск 711 склона холма, и это позволяет более точно произвести оценку поведения водителя. Определяя точку α, где угол наклона при подъеме по склону холма не превышает заранее определенное значение, например 1° или 2°, то есть подъем склона холма начинает выравниваться и становиться более горизонтальным, и точку β, где угол наклона последующего спуска склона холма превышает заранее определенное значение, например 1° или 2°, то есть начинает становиться более крутым, расстояние d может быть определено как расстояние между этими двумя точками. Определяя также точку γ, где водитель отпускает педаль акселератора, расстояние d 1 может быть определено как составляющее расстояния точки γ от точки β. Таким образом, d 1/d может быть определено как результат измерения способности водителя отпускать педаль акселератора на вершине холма, где высокое значение d 1/d указывает на правильный режим расхода топлива. Когда такой режим реализуется, водитель может отпускать педаль акселератора непосредственно перед точкой α, поэтому расстояние d 1 может, таким образом, быть длиннее, чем d, и отношение d 1/d может, таким образом, быть больше единицы, что указывает на очень правильный режим расхода топлива. Вместо определения точек α и β как конкретных углов наклона может использоваться сопротивление движению. В этом случае точка α определяется точкой, где сопротивление движению падает ниже определенного значения, и точка β определяется точкой, где абсолютное значение отрицательного сопротивления движению превышает заранее определенное значение. Используя сопротивление движению вместо использования только угла наклона грунта, может быть выполнена более точная оценка, при которой оценка может, например, учитывать вес транспортного средства, то есть не зависеть от того, загружено или не загружено транспортное средство.
На фиг. 8 показано устройство 800, соответствующее третьему примеру варианта осуществления настоящего изобретения. Подобно устройству, показанному на фиг. 2b, устройство 800 содержит средство 801 для приема сигналов в соответствии с вышесказанным и блок 802 обработки данных для выполнения обработки принятых данных согласно изложенному ниже. Устройство 800 также содержит средство 803 для вывода обработанных данных, например, на дисплей или на систему звукового воспроизведения, для обратной связи с водителем транспортного средства.
Устройство 800 содержит средство для оценки существующего расхода топлива по отношению к текущему сопротивлению движению. Таким образом, может быть вычислен правильный результат измерения израсходованного количества топлива с учетом степени трудностей вождения, когда учитываются масса транспортного средства, наклон дороги, скорость, аэродинамическое сопротивление и сопротивление качению.
Чтобы иметь возможность создать справедливый результат измерения того, насколько эффективно в отношении расхода топлива водитель управляет транспортным средством, который возможно сравнивать с соответствующими результатами измерений, которые получены для других водителей других транспортных средств, имеющих разную загрузку и которые осуществляют перевозку на другие расстояния, для цели определения способности водителя важно иметь возможность связать расход с факторами, на которые водитель не может влиять. Эти факторы состоят из того, что было описано раньше как сопротивление движению, то есть сумма всех внешних сил, влияющих на транспортное средство. Соответственно, связывая текущий расход с этим сопротивлением движению, может быть создан истинный результат измерения способности водителя, который затем может сравниваться с соответствующими результатами измерений других водителей, независимо от того, управлял ли один из них тяжело груженым транспортным средством при езде в горы, в то время как другой вел незагруженное транспортное средство по горизонтальной местности. Этот результат измерения может быть вычислен следующим образом:
где k - константа и B - текущий расход топлива, выраженный в единицах измерения объема на единицу длины. Этот результат измерения, однако, вводит в заблуждение при спуске по склону холма (поскольку большое отрицательное сопротивление движению не должно вести к снижению расхода) и не должен поэтому использоваться при таких ситуациях. Эти ситуации, однако, используются процессом, показанным выше на фиг. 3, и поэтому U 4, следовательно, вычисляется, только когда сопротивление движению положительно.
Вычисляя среднее значение U 4 для данной поездки, могут сравниваться два различных водителя. При осуществлении этого функциональные возможности, описанные со ссылкой на фиг. 8, если требуется, могут быть встроены в устройство типа, показанного на фиг. 2b и/или на фиг. 6.
Следовательно, в соответствии с настоящим изобретением, поведение водителя может быть определено для множества очень важных ситуаций с точки зрения расхода топлива. Дополнительно, может быть создан очень справедливый результат измерения, который впервые позволяет, например, владельцу парка транспортных средств сравнивать значения расхода топлива для разных водителей быстрым и точным способом, несмотря на то что эти водители управляли разными транспортными средствами, везли различный груз и на различные расстояния.
Анализ вышеупомянутых ситуаций может давать справедливую оценку знания данным водителем принципов экономичности вождения транспортного средства и, настолько, насколько возможно, применения их на практике. Описанные вычисления могут выполняться после водительской смены как основание для наказания или вознаграждения водителя, а также в реальном времени во время вождения, чтобы обучать водителя более благоприятному режиму вождения, например, посредством советов. Например, водитель может получать советы через дисплей, когда транспортное средство прошло вершину холма и зарегистрированное значение U 3 было выше того, которое было предварительно определено как желательное. Другой областью использования является создание отчетов о средних значениях для одного или множества U 1, U 2, U 3, U 4 для всех водителей в бизнесе транспортных перевозок, чтобы иметь возможность соответственно выявлять водителей, которые водят транспортное средство наиболее и наименее эффективным способом с точки зрения расхода топлива.
Описанное изобретение может, следовательно, новым и уникальным способом описывать, как водитель, эффективно расходующий топливо, ведет транспортное средство на протяжении всего маршрута, и анализировать поведение водителя во множестве ситуаций, которые особенно хорошо описывают способность водителя к вождению, эффективному в отношении расхода топлива.
В приведенном выше описании изобретение было описано только в связи с наклоном дороги. Описанная оценка водителя может, однако, быть дополнительно уточнена также с учетом среды дорожного движения в других отношениях. В отношении среды дорожного движения возможно получить очень точное представление окружения транспортного средства. В параллельной шведской патентной заявке 0601176-1, озаглавленной "Classification Device" и имеющей ту же самую дату регистрации, что и настоящая заявка, описано решение для определения во время поездки типа маршрута, который делится на участки маршрута, которые проходит транспортное средство. Описанное решение может очень точным способом определять тип множества следующих друг за другом или соседствующих участков, таких как правый поворот, левый поворот, прямой участок, подъем по склону холма, спуск по склону холма, и, особенно вместе с данными времени и/или скорости, выполнять точную классификацию маршрута. Классификация может содержать, например, вождение на холостом ходе, отбор мощности (PTO), выстраивание в определенном порядке, очередь, городской центр, городская зона, холмистая и/или прямая или искривленная дорога, прямая и горизонтальная или холмистая дорога.
Описанные выше примеры устройств, соответствующие настоящему изобретению, могут содержать средство приема классификации среды от устройства, соответствующего упомянутой патентной заявке. Альтернативно, устройство, соответствующее настоящему изобретению, может содержать средство для выполнения упомянутой описанной классификации среды дорожного движения. Используя очень точное описание среды дорожного движения (среды транспортного средства), таким способом может быть также учтено, управлялось ли транспортное средство, например, в среде городского дорожного движения с большим числом троганий и остановок и имело ли по этой причине более высокий расход. Соответственно, результатом этого является возможность осуществления очень точного анализа поведения водителя.
В соответствии со сказанным выше настоящее изобретение может использоваться для обратной связи с водителем в режиме реального времени и, помимо подачи советов в соответствии со сказанным выше, транспортное средство может обеспечиваться дисплеем, который постоянно показывает упомянутые выше значения U или объединенный результат измерения всех значений U, например, как процент между 0 и 100, где, например, результат 85% и выше указывает на очень экономичный режим вождения. Следовательно, водитель может "соревноваться" с самим собой и с другими в вождении безопасным и экономичным способом.
Настоящее изобретение может далее быть объединено с другими системами для оценки водителя транспортного средства.
В параллельной шведской патентной заявке 0601173-8, озаглавленной "Anordning for bromsslitagebedomning" (на английском языке: "Device for Brake Wear Assessment") и имеющей ту же самую дату регистрации, что и настоящее изобретение, описано решение по оценке способности водителя транспортного средства использовать тормоза транспортного средства. Настоящее изобретение может успешно использоваться совместно с упомянутым решением.
Дополнительно, в параллельной шведской патентной заявке 0601175-3, озаглавленной "Anordning for bestamning av forutseendeformaga" (на английском языке: "Device for Determining an anticipation ability") и имеющей ту же самую дату регистрации, что и настоящая заявка, описана другая система для оценки водителя, которая может успешно использоваться совместно с настоящим изобретением. Эта патентная заявка раскрывает устройство для оценки способности водителя транспортного средства к упреждению, измеряя манеру, в которой используются органы управления акселератором и тормозами транспортного средства.
Комбинируя множество различных процедур для оценки водителя транспортного средства, когда они берутся вместе, может быть выполнена очень точная оценка манеры езды водителя транспортного средства.
Когда это осуществляется, транспортное средство может быть выполнено с возможностью непрерывной или с определенными интервалами передачи данных, например, через мобильную систему связи в центр наблюдения, например измеренных значений за последние 5 минут, посредством чего вышеупомянутая оценка может выполняться в центре наблюдения, а не в транспортном средстве.

Группа изобретений относится к технике контроля и регистрации режимов работы транспортных средств (ТС). Предложенные варианты устройства предназначены для определения режима расхода топлива водителем ТС, по меньшей мере, для первого участка маршрута, по которому движется ТС, в котором упомянутый первый участок является, по меньшей мере, одним спуском склона холма. Устройство содержит средство для определения, находится ли ТС на упомянутом участке. Имеется также средство, которое, когда ТС находится на упомянутом участке, непрерывно, или с некоторыми, или заранее определенными интервалами определяет, предпринимает ли водитель ТС первую меру, где упомянутая первая мера является мерой по отбору от двигателя положительного вращающего момента. Кроме того, используются средство для определения результата измерения действия упомянутой первой меры на упомянутом участке и средство, действующее на основе упомянутого результата измерения действия, для определения значения параметра, представляющего режим расхода топлива, начиная с определения заранее определенных критериев. Группа изобретений позволяет водителю водить ТС экономически эффективно в отношении расхода топлива. 4 н. и 34 з.п. ф-лы, 10 ил.
1. Устройство для определения режима расхода топлива водителем транспортного средства, по меньшей мере, для первого участка маршрута, по которому движется транспортное средство, при этом упомянутый первый участок образуется спуском по склону холма, отличающееся тем, что устройство содержит:
средство для определения, находится ли транспортное средство на упомянутом участке,
средство, которое, когда транспортное средство находится на упомянутом участке, непрерывно или с некоторыми или заранее определенными интервалами определяет, предпринимает ли водитель транспортного средства первую меру, в котором первая мера является мерой по отбору положительного вращающего момента двигателя,
средство для определения результата измерения действия упомянутой первой меры во время прохождения участка и
средство, действующее на основе упомянутого результата измерения, определяющее значение параметра, представляющего режим расхода топлива, исходя из заранее определенных критериев.
2. Устройство по п.1, в котором упомянутый результат измерения состоит из представления времени, в течение которого упомянутая первая мера предпринималась по отношению к общему времени прохождения упомянутого участка, и/или представления количества энергии, произведенного упомянутой мерой.
3. Устройство по п.1 или 2, в котором упомянутые заранее определенные критерии содержат одну или более групп: представление времени, в течение которого упомянутая соответствующая мера или меры предпринимались по отношению к общему времени прохождения упомянутого участка и/или представление количества энергии, произведенного упомянутой соответствующей мерой или мерами, массой транспортного средства, градиентом наклона, сопротивлением движению.
4. Устройство по п.1, в котором средство определения, находится ли транспортное средство на спуске склона холма, содержит средство для выполнения упомянутого определения посредством определения сопротивления движению транспортного средства, при этом устройство содержит средство для приема, по меньшей мере, одного значения параметра, представляющего сопротивление движению транспортного средства, или, по меньшей мере, одно значение параметра, по меньшей мере, от одного внутреннего датчика транспортного средства, с помощью которого может быть определено сопротивление движению транспортного средства.
5. Устройство по п.1, в котором средство для определения, находится ли транспортное средство на спуске склона холма, содержит любое устройство из группы:
уклономер, акселерометр, барометр, навигационная система, такая как GPS.
6. Устройство по п.1, в котором дополнительно содержится
средство, которое, если водитель в течение прохождения упомянутого участка применял упомянутую первую меру, постоянно или с некоторыми или заранее определенными интервалами определяет, применяет ли водитель транспортного средства вторую меру, которая является мерой торможения транспортного средства,
средство для определения результата измерения упомянутой второй меры во время прохождения второго участка, и
средство, которое, когда водитель применяет упомянутую вторую меру, определяет значение параметра, представляющего режим расхода топлива, когда величина упомянутой второй меры превышает заранее определенное пороговое значение.
7. Устройство по п.6, в котором упомянутый результат измерения является представлением времени, в течение которого упомянутая вторая мера применялась, по отношению к общему времени прохождения участка, и/или представлением количества энергии, произведенного упомянутой второй мерой.
8. Устройство по п.1, которое дополнительно содержит средство, которое, если второй участок, находящийся рядом или непосредственно следующий за упомянутым первым участком, является подъемом склона холма и упомянутая первая мера была предпринята во время заранее определенной части упомянутого первого участка, стирает значения параметров, представляющих режим расхода топлива, созданный во время прохождения упомянутой заранее определенной части.
9. Устройство по п.7, в котором упомянутые определенные критерии являются параметрами для упомянутого второго участка, такими как длина участка и/или градиент участка.
10. Устройство по п.1, в котором упомянутые первая и вторая меры соответственно предпринимаются, по меньшей мере, через одно из группы устройств: педаль акселератора, средства управления акселератором, педаль тормоза, средства управления тормозами, управление круизом, замедлитель, тормоз постоянной скорости.
11. Устройство по п.1, которое дополнительно содержит средства деления на участки маршрута пути, по которому движется транспортное средство:
средство для определения, что участок начался,
средство для определения опорного направления движения,
средство, которое во время прохождения упомянутого участка принимает, по меньшей мере, одно значение параметра направления, который является представлением направления движения транспортного средства или с помощью которого представление направления движения транспортного средства может быть определено,
средство для определения, что транспортное средство достигло конца участка,
средство, которое из упомянутых принятых значений параметра направления определяет тип начинающегося участка по заранее определенным критериям, и
средство, которое посредством одного или множества последовательных участков или участков, находящихся рядом друг с другом, определяет окружение транспортного средства.
12. Устройство по п.11, отличающееся тем, что упомянутые значения параметров создаются внутренними датчиками транспортного средства.
13. Устройство по п.11, отличающееся тем, что упомянутый тип участка является любым участком из следующей группы:
правый поворот, левый поворот, прямой участок, кольцевая площадка, вершина холма, долина.
14. Устройство по п.1, которое содержит средство для хранения упомянутого значения параметра, представляющего режим расхода топлива, вместе с представлением упомянутого окружения транспортного средства.
15. Устройство по п.14, в котором устройство содержит средство для хранения упомянутых данных для множества последовательных определений режима расхода топлива.
16. Устройство по п.15, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на средство отображения и/или на средство звукового воспроизведения, установленное в упомянутом транспортном средстве.
17. Устройство по п.1, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на удаленно расположенный центр контроля.
18. Устройство по п.1, отличающееся тем, что оно содержит средство для приема сигналов, представляющих вращающий момент двигателя, трение двигателя, общее передаточное число, радиусы ведущих колес, ускорение и массу транспортного средства.
19. Устройство по п.1, отличающееся тем, что упомянутое определение значения параметра, представляющего режим расхода топлива, начинается с определения заранее определенных критериев.
20. Устройство по п.1, отличающееся тем, что одно или множество упомянутых средств образуются с помощью компьютерной программы, при этом устройство, по меньшей мере, частично образуется компьютерным программным продуктом, содержащим читаемый компьютером носитель данных и компьютерную программу, в котором компьютерная программа содержится на читаемом компьютером носителе.
21. Устройство по п.20, отличающееся тем, что упомянутый читаемый компьютером носитель данных является одним или более устройств из следующей группы: ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), флэш-память, EEPROM (электрически стираемое PROM).
22. Устройство для определения режима расхода топлива водителем транспортного средства, по меньшей мере, для участка маршрута, по которому движется транспортное средство, при этом упомянутый участок является, по меньшей мере, одним подъемом по склону холма, следующим за спуском по склону холма, отличающееся тем, что устройство содержит:
средство, которое, по меньшей мере, во время части упомянутого подъема по склону холма и упомянутого спуска по склону холма непрерывно или с некоторыми или заранее определенными интервалами определяет,
предпринимает ли водитель транспортного средства первую меру, в котором первая мера является мерой по отбору положительного вращающего момента двигателя,
средство для определения первого результата измерения действия упомянутой первой меры во время прохождения подъема склона холма и второго результата измерения действия упомянутой первой меры во время прохождения упомянутого спуска склона холма и
средство, действующее на основе упомянутого определенного результата измерения, определяющее значение параметра, представляющего режим расхода топлива для упомянутой секции, исходя из заранее определенных критериев.
23. Устройство по п.22, в котором упомянутые заранее определенные критерии для упомянутого определения режима расхода топлива содержат сравнение упомянутого первого результата измерения и упомянутого второго результата измерения.
24. Устройство по п.22 или 23, в котором упомянутый первый результат измерения является представлением мгновенного или среднего вычисленного значения времени отбора вращающего момента от двигателя во время, по меньшей мере, части упомянутого подъема по склону холма, и упомянутый второй результат измерения является представлением мгновенного или среднего вычисленного значения времени отбора вращающего момента двигателя во время, по меньшей мере, части упомянутого спуска по склону холма.
25. Устройство по п.22, в котором дополнительно содержится средство, которое при упомянутом определении упомянутого режима расхода топлива сравнивает сопротивление движению транспортного средства во время упомянутого подъема по склону холма с сопротивлением движению транспортного средства во время упомянутого спуска по склону холма.
26. Устройство по п.22, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на средство отображения и/или средство звукового воспроизведения, установленное в упомянутом транспортном средстве.
27. Устройство по п.22, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на удаленно расположенный центр контроля.
28. Устройство по п.22, отличающееся тем, что определение значения параметра, представляющего режим расхода топлива, начинается с определения заранее определяемых критериев.
29. Устройство для определения режима расхода топлива водителем транспортного средства, по меньшей мере, для участка маршрута, который проходит транспортное средство, при этом упомянутый участок образуется, по меньшей мере, одним подъемом склона холма, следующим за спуском со склона холма, отличающееся тем, что устройство содержит:
средство для определения значения параметра, представляющего конец подъема по склону холма,
средство для определения значения параметра, представляющего начало последующего спуска по склону холма,
средство, которое во время прохождения упомянутого участка определяет значение параметра, представляющего параметр для меры, предпринимаемой водителем транспортного средства, в котором упомянутая мера является мерой снижения отбора положительного вращающего момента двигателя,
средство, действующее на основе упомянутых значений параметров, определяющее значение параметра расхода, представляющего режим расхода топлива для упомянутого участка.
30. Устройство по п.29, отличающееся тем, что определение значения параметра, представляющего конец подъема склона холма, содержит определение точки α, в которой наклон подъема склона холма падает ниже заранее определенного угла или в которой сопротивление движению транспортного средства падает ниже заранее определенного значения.
31. Устройство по п.29 или 30, отличающееся тем, что определение значения параметра, представляющего начало спуска склона холма, содержит определение точки β, в которой наклон спуска склона холма превышает заранее определенный угол или в которой абсолютная сумма сопротивления движению транспортного средства превышает заранее определенное значение.
32. Устройство по п.29, отличающееся тем, что упомянутое значение параметра, представляющего меру для уменьшения положительного вращающего момента двигателя, устанавливается путем определения точки γ, в которой выполняется мера по снижению отбора положительного вращающего момента двигателя.
33. Устройство по п.29, отличающееся тем, что определение того, предпринимает ли водитель транспортного средства первую меру, выполняется с возможностью выполнения непрерывно или с некоторыми или заранее определенными интервалами.
34. Устройство по п.29, отличающееся тем, что оно дополнительно содержит средство для хранения упомянутых значений параметров.
35. Устройство по п.29, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на средство отображения и/или на средство звукового воспроизведения, установленное в упомянутом транспортном средстве.
36. Устройство по п.29, отличающееся тем, что оно содержит средство для передачи упомянутого значения параметра, представляющего режим расхода топлива, на удаленно расположенный центр контроля.
37. Устройство по п.29, отличающееся тем, что определение значения параметра, представляющего режим расхода топлива, начинается с определения заранее определяемых критериев.
38. Транспортное средство, отличающееся тем, что оно содержит устройство по любому из пп.1-37.
| ПЕРЕГРУЗОЧНЫЙ БОКС ДЛЯ МЕХАНИЗМА ПЕРЕГРУЗКИ ЯДЕРНОГО РЕАКТОРА | 1978 |
|
SU683382A1 |
| СПОСОБ ОТВЕРЖДЕНИЯ КРЕМНИЙОРГАНИЧЕСКИХ ПОЛИМЕРОВ И КОМПОЗИЦИЙ НА ИХ ОСНОВЕ | 0 |
|
SU197176A1 |
| КОМБИНИРОВАННЫЙ С ФОРСУНКОЙ ДЛЯ РАСПЫЛИВАНИЯ ТОПЛИВА ДЕКОМПРЕССИОННЫЙ КЛАПАН ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО ГОРЕНИЯ | 1927 |
|
SU7150A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178585C1 |

