Область техники
Настоящее изобретение относится к системам для определения способности к предвидению у водителя транспортного средства, в частности к устройству для оценки способности к предвидению у водителя транспортного средства в соответствии с ограничительной частью п. 1 формулы изобретения.
Уровень техники
При вождении тяжелых транспортных средств, таких как грузовые автомобили, автобусы, и тому подобное, экономия времени для транспортного средства сильно воздействует на доходность бизнеса, в котором используется транспортное средство. Кроме стоимости самого транспортного средства самые большие пункты расходов для транспортного средства представляют собой стоимость горючего и стоимость обслуживания. Эти расходы часто взаимосвязаны, то есть транспортное средство, которое используется более интенсивно, как потребляет больше горючего, так и подвергается большему износу, с увеличением, как следствие, стоимости обслуживания. Проблема для компаний, которые используют тяжелые транспортные средства в их бизнесе, состоит, тем не менее, в том, что трудно установить, насколько большая часть потребления горючего и износа возникает, например, из-за неосторожного вождения, и насколько большая величина возникает из-за неблагоприятной окружающей среды дорожного движения, такой как исключительно неровное дорожное покрытие и/или городская окружающая среда.
Износ, которому подвергается транспортное средство во время неосторожного вождения, может, по меньшей мере, частично, вызываться тем, что транспортное средство подвергается избыточному количеству ненужных ускорений и замедлений.
В публикации WO00/07150 описаны система и способ для того, чтобы показать водителю, как вести транспортное средство эффективным образом. Например, тормозное усилие или ускорение и замедление могут измеряться для оценки того, ведет ли водитель транспортное средство благоприятным образом. Система использует фиксированный наименьший интервал времени, за который мотор, как предполагается, работает на холостом ходу, между ускорением и замедлением. Однако с точки зрения окружающей среды эта процедура не является желательной, поскольку повсеместно известно, что работа на холостом ходу, в особенности в перспективе окружающей среды и горючего, должна исключаться. Однако водитель должен, разумеется, затормозить двигатель, когда педаль акселератора отпускается, перед тем как нажать на тормоз. Проблема с этой системой заключается в том, что имеются ускорение и замедление, соответственно, которые измеряются. Если транспортное средство двигается по холмистой местности, оно сначала подвергается замедлению, а после этого ускорению (на вершине холма), но это ни в коем случае не говорит о том, что водитель имеет плохую способность к предвидению интенсивности дорожного движения.
Соответственно, имеется необходимость в улучшенном способе, который должен быть способен оценивать способность к предвидению у водителя транспортного средства.
Сущность изобретения
Целью настоящего изобретения является создание устройства для определения способности к предвидению у водителя транспортного средства в ситуации дорожного движения, которое решает указанную выше проблему. Эта и другие цели достигаются в соответствии с настоящим изобретением с помощью устройства согласно п.1 формулы изобретения.
В соответствии с настоящим изобретением создано устройство, которое содержит средство для определения того, предпринял ли водитель транспортного средства первую меру, при этом первая мера представляет собой меру торможения или меру отбора положительного крутящего момента двигателя, например, посредством затребования ускорения, средства для определения первого момента времени, в который мера заканчивается, средство для определения второго момента времени, в который водитель предпринимает вторую меру, противодействующую первой мере. Устройство дополнительно содержит средство для приема, по меньшей мере, одного значения эталонного параметра, представляющего окружающую среду транспортного средства, или, по меньшей мере, одного значения параметра, по меньшей мере, от одного внутреннего сенсора транспортного средства, посредством которого может определяться значение эталонного параметра, представляющего окружающую среду транспортного средства, и средство для сравнения значения, представляющего разницу между указанным вторым моментом времени и указанным первым моментом времени со значением эталонного параметра, и на основе этого сравнения определения значения параметра, представляющего способность водителя к предвидению. Указанная первая и вторая меры соответственно могут осуществляться, например, посредством одного устройства, выбранного из группы, состоящей из педали акселератора, устройства для управления подачей горючего, педали тормоза, устройства для управления тормозами, круиз-контроля, замедлителя и моторного тормоза для поддержания постоянной скорости.
Это имеет то преимущество, что каждый раз, когда водитель транспортного средства переходит от осуществления меры приведения в действие транспортного средства первого типа к мере приведения в действие транспортного средства второго типа, проходящее время или расстояние, которое проходит транспортное средство за это время, может сравниваться с соответствующим эталонным временем или эталонным расстоянием, которое определяется на основании окружающей среды транспортного средства, то есть может быть принято во внимание то, были ли условия окружающей среды при переходе от одной меры к другой такими, что короткий промежуточный период был желательным или даже необходимым, или же промежуточный период должен был быть значительно более продолжительным. Например, в городской окружающей среде могут быть сложности с более продолжительным периодом времени между осуществлением мер, в то время как водитель на шоссе не должен быть особенно предусмотрительным, чтобы иметь возможность получить такой же более продолжительный период. Как считается, эталонное расстояние может просто преобразовываться во время, когда скорость транспортного средства на эталонном расстоянии является известной.
Соответственно, каждый переход от одной меры к другой, который осуществляется, может изучаться подробно для оценки того, осуществлялся ли он правильным образом, принимая во внимание обстоятельства окружающей среды дорожного движения.
Устройство может содержать средства для передачи указанного значения параметра, представляющего способность к предвидению у водителя, на средства дисплея, расположенные на транспортном средстве. Это имеет то преимущество, что водитель может непосредственно получать обратную связь в ответ на его/ее поведение.
Устройство может содержать средства для хранения определенной способности к предвидению для множества ситуаций дорожного движения. Это имеет то преимущество, что может определяться, например, средняя способность водителя на определенном расстоянии или на определенном периоде времени. Указанные значения параметра, представляющие способность к предвидению у водителя, могут передаваться в удаленный центр мониторинга. Это имеет то преимущество, что владелец множества транспортных средств может оценивать множество водителей транспортных средств из центра.
Указанные ситуации дорожного движения могут состоять из любых ситуаций, выбранных из группы, состоящей из: правого поворота, левого поворота, правого виража, левого виража, прямого участка, кругового движения, вершины холма, долины. Это имеет то преимущество, что при указанном определении может использоваться очень точное описание окружающей среды транспортного средства и по этой причине может осуществляться очень точное определение.
Настоящее изобретение также относится транспортному средству.
Краткое описание чертежей
Фиг.1 - схематическая иллюстрация системы управления для транспортного средства, на котором может преимущественно использоваться настоящее изобретение;
Фиг.2a-b - иллюстрация примера устройства в соответствии с настоящим изобретением;
Фиг.3 - иллюстрация примера способа в соответствии с настоящим изобретением; и
Фиг.4 - иллюстрация альтернативного примера способа в соответствии с настоящим изобретением.
Подробное описание примеров вариантов
осуществления изобретения
В настоящем описании термин внутренние сенсоры транспортного средства означает сенсоры, которые получают данные только от относительных движений транспортного средства, то есть изменений движения от одного момента времени до другого, и которые не используют информации от внешних систем, таких как системы позиционирования или картографические базы данных. Такие внутренние сенсоры транспортного средства могут, например, состоять из сенсоров латерального ускорения, то есть сенсоров, подающих сигналы, с помощью которых может определяться скорость изменения скорости движения транспортного средства в латеральном направлении, например, для определения того, возникает ли риск опрокидывания транспортного средства из-за того, что водитель осуществил неосторожный маневр. Кроме того, сенсоры могут содержать сенсоры скорости вращения колес, то есть сенсоры для подачи сигналов, с помощью которых может определяться скорость вращения колес и пройденное расстояние, сенсоры угла поворота передних колес, которые подают сигналы, с помощью которых может определяться угол поворота передних колес по отношению к продольной оси транспортного средства, и сенсорные средства для подачи сигналов, с помощью которых может вычисляться скорость рыскания, то есть насколько быстро транспортное средство поворачивает.
Если предполагается концепция отбора крутящего момента двигателя, в настоящем описании толкающее усилие двигателя транспортного средства действует на проталкивание транспортного средства вперед. Отбор положительного крутящего момента двигателя имеет то значение, что двигатель посредством подачи горючего и с помощью соответствующего положения шестерен генерирует усилие, которое направлено на толкание транспортного средства вперед, в направлении движения транспортного средства. Наоборот, отбор отрицательного крутящего момента двигателя означает торможение двигателя с помощью соответствующей шестерни, которая стремится уменьшить скорость транспортного средства в направлении движения.
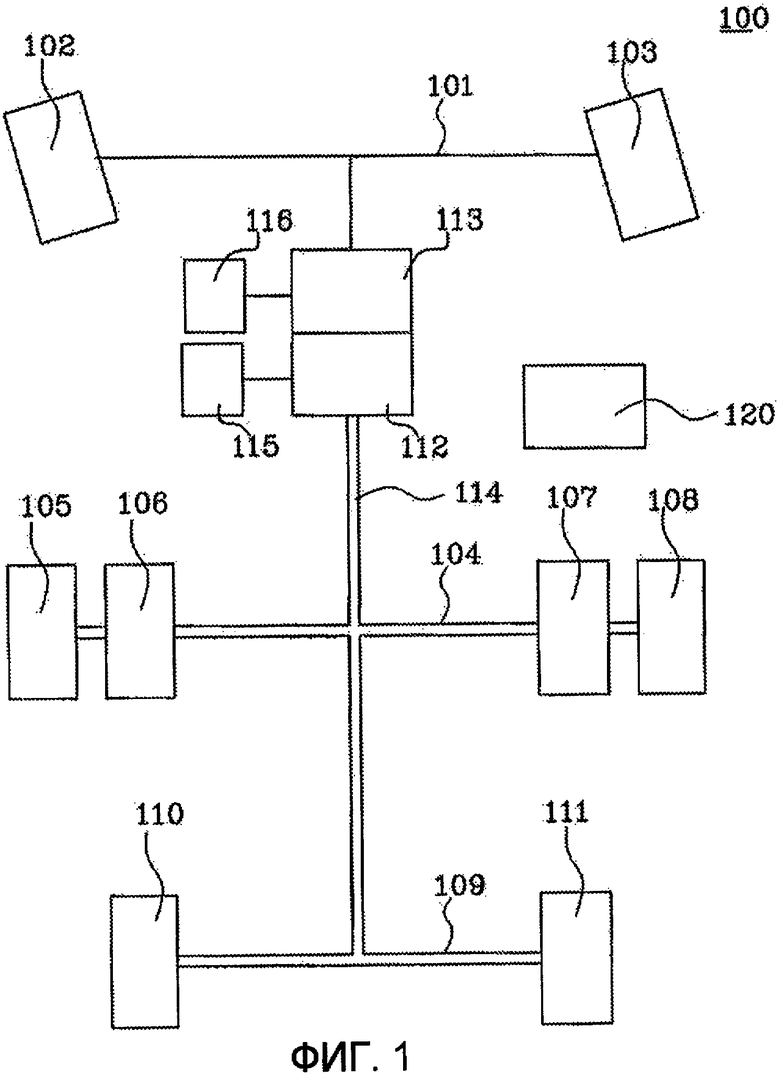
На фиг.1 схематически иллюстрируется система управления для транспортного средства 100, с помощью которой может использоваться настоящее изобретение. Транспортное средство 100 содержит передний вал 101 с передними колесами 102, 103, задний приводной вал 104 с ведущими колесами 105-108 и задний вал выравнивания давления 109 с колесами 110, 111. Кроме того, транспортное средство 100 содержит двигатель 113, соединенный с коробкой 112 передач, который приводит в движение приводной вал 104 посредством выходного вала 114 коробки передач.
Коробка 112 передач и двигатель 113 управляются с помощью узлов 115, 116 управления соответственно, которые управляются с помощью главного узла 117 управления. Система 116 управления двигателем (EMS) контролирует функции двигателя транспортного средства, которые, например, могут включать в себя впрыск горючего и тормоз двигателя. Контроль основывается на ряде входных сигналов, которые могут включать в себя сигналы от (не показаны) контрольных устройств подачи горючего (положения педали акселератора), сенсора скорости и системы управления тормозами. Система 115 управления коробкой передач (GMS) регулирует функции шестерен, причем при использовании автоматической коробки передач смена шестерен может управляться на основе входного сигнала от сенсоров скорости, при ручном переключении передач эта смена может управляться от входного сигнала от селектора передач (рычага коробки передач).
Кроме того, транспортное средство содержит систему управления тормозами (BMS) с узлом 120 управления тормозов, который регулирует функции тормозов транспортного средства, такие как автоматическое вычисление нагрузки, так что данное положение педали всегда может приводить к одинаковому эффекту торможения, независимо от нагрузки. Узел управления тормозами управляет различными тормозными системами транспортного средства, например замедлителем и другими вспомогательными тормозными системами, тормозом-замедлителем в выпускной системе двигателя и рабочим тормозом, и посылает сигналы управления в модули системы (не показаны), распределенные на шасси, причем электрические сигналы управления используются, например, для регулировки давления в тормозах.
Транспортное средство, которое показано на фиг.1, дополнительно содержит, как правило, ряд дополнительных узлов управления (см., например, публикацию WO01/86459 Al). По этой причине описанные выше узлы управления составляют только лишь примеры того, что может присутствовать в транспортном средстве. Как понятно специалисту в данной области, два или более из описанных выше узлов управления могут, разумеется, интегрироваться в одном едином узле управления.
В транспортном средстве, которое показано на фиг.1, желательно, чтобы водитель, когда он ведет транспортное средство, был настолько предусмотрительным, насколько это возможно, для устранения ненужных действий торможения и ускорения, например, таких, которые вызываются выдерживанием слишком короткой дистанции до идущего впереди транспортного средства, или тем, что водитель ускоряется на вершине холма, чтобы следом за тем затормозить на следующем склоне холма. Значительно лучше, с точки зрения износа, а также с точки зрения потребления горючего, если водитель настолько, насколько это возможно, воспользуется преимуществом энергии, накопленной в транспортном средстве, а не будет потреблять ее, используя тормоза без необходимости. Однако идеальное управление транспортным средством со стороны водителя в различных ситуациях изменяется в большой степени и в настоящее время очень трудно определить, является ли поведение водителя хорошим или плохим, и по этой причине является также трудным предоставление водителю обратной связи относительно того, что можно сделать лучше, и в то же время владельцу транспортного средства трудно оценить, осуществляется ли вождение транспортного средства удовлетворительным, то есть экономичным образом.
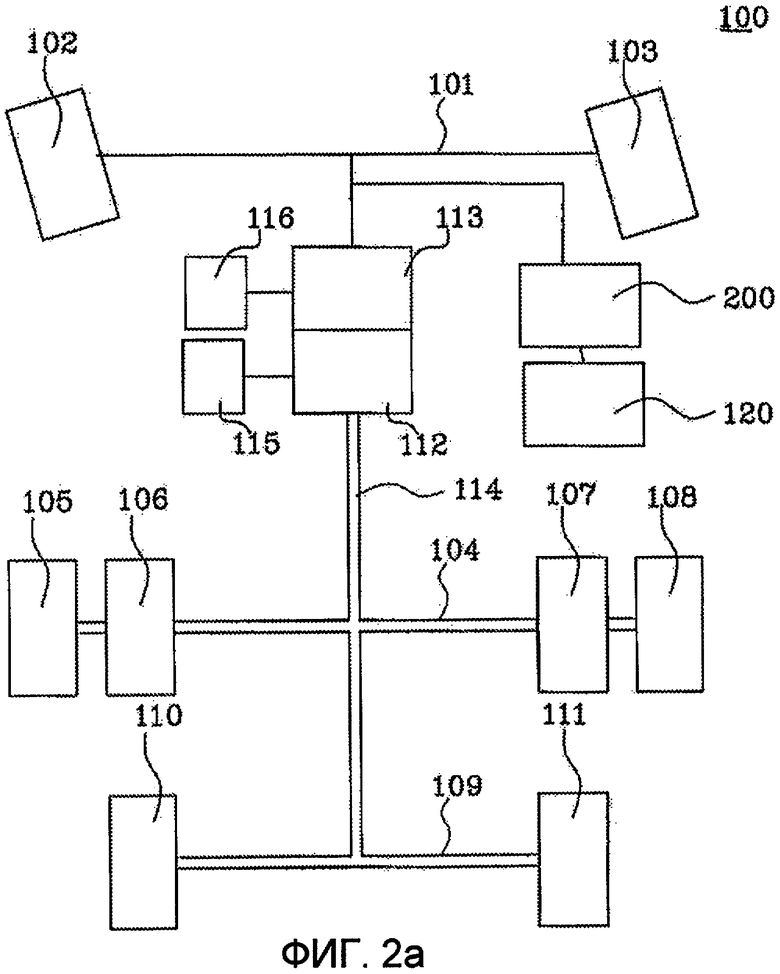
Настоящее изобретение предусматривает устройство для оценки способности к предвидению у водителя транспортного средства, причем способность водителя к управлению транспортным средством в каждой данной ситуации дорожного движения может оцениваться посредством оценки внутренних данных от транспортного средства, таких как положение педали акселератора, положение педали тормоза, и информации об окружающей среде, например от того типа радара, который используется устройствами адаптивного круиз-контроля. Настоящее изобретение объясняется более подробно со ссылками на фиг.2a-b, при этом на фиг.2a показано транспортное средство с фиг.1, которое снабжено устройством 200 в соответствии с настоящим изобретением.
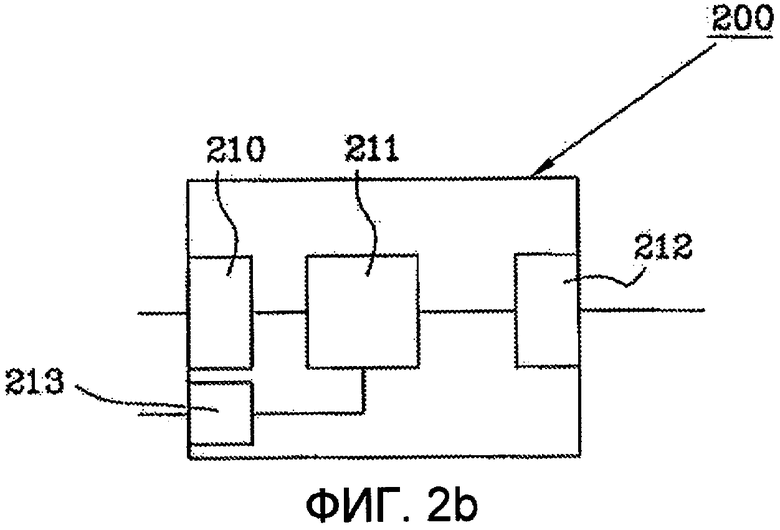
Устройство 200 показано более подробно на фиг.2b и содержит средство 210 для приема сигналов, представляющих положение педали акселератора и положение педали тормоза, и если это необходимо, преобразует эти сигналы в формат, адаптированный для узла 211 обработки данных. Эти сигналы могут состоять из представления реального положения педалей, которые могут считываться с использованием соответствующего сенсора, или основываться на вычисленном "положении", посредством меры, предпринятой водителем, увеличения тормозного момента или затребованного крутящего момента двигателя. Например, положение устройства для управления тормозами, заданное водителем, для определенной тормозной системы может посредством конструкции транспортного средства приспосабливаться для преобразования в электронный сигнал, который затем обрабатывается системой управления транспортного средства для приложения на основе этого сигнала соответствующего тормозного момента, то есть современные тяжелые транспортные средства часто конструируются таким образом, что тормозной момент, затребованный водителем, то есть посредством педали тормоза, преобразуется в электрическое представление того, насколько большая часть общей тормозящей способности тормозной системы должна прикладываться, и он затем сообщается рассмотренному выше узлу 120 управления тормозами, обычно через шину данных, посредством которой данные могут сообщаться между узлами управления транспортного средства. Альтернативно, узел 120 управления тормозами может осуществлять указанное преобразование сигнала и, если требуется, сделать эти сигналы доступными на шине данных. Данные могут передаваться, например, на основе любого из форматов шины данных CAN (локальная сеть контроллеров), TTCAN или FlexRay, причем сигналы могут передаваться в обычном формате передачи данных. Соответственно, представление положения педали акселератора/управления подачей горячего может быть сделано доступным на шине данных, например, для передачи в рассмотренный выше узел 116 управления двигателем. Как следствие, существующие транспортные средства уже сегодня часто содержат функцию отображения доступной информации относительно положения педали/управления тормозами и положения педали/управления подачей горючего на шине данных транспортного средства. Средства 210 устройства 200 могут по этой причине представлять собой соединение шины данных для приема сигналов, представляющих положения управления. Принятые сигналы затем добавляются в узел 211 обработки данных, функционирование которого описывается ниже.
Узел 211 обработки данных может, например, состоять из процессора, который контролируется посредством рабочих инструкций, таких как компьютерная программа, генерируемая с помощью соответствующего языка программирования и хранимая в средствах памяти, указанные средства памяти встраиваются в процессор или присоединяются к нему. Указанные средства памяти могут состоять, например, из одного или нескольких устройств из группы: ПЗУ (постоянное запоминающее устройство), программируемое ПЗУ, перепрограммируемое ПЗУ, флэш-память, ЭСППЗУ (Электрически-стираемое программируемое ПЗУ). Устройство 200 может состоять из узла обработки данных как со встроенной памятью, так и с встроенным интерфейсом шины для шины данных указанного выше типа, и по этой причине оно может конструироваться очень компактным образом. Устройство 200 дополнительно содержит выходные средства 212 для вывода обработанных данных, например для непрерывной передачи данных центру управления группой транспортных средств или для представления водителю транспортного средства. Вместо устройства, принимающего положения педалей через шину данных, в соответствии с тем, что написано выше, указанные средства 210 могут вместо этого состоять из точек соединений для приема сигналов от сенсоров, представляющих положения педалей. Следовательно, устройство может содержать средства, такие как аналогово-цифровые преобразователи или приемники для приема передаваемых без проводов сигналов от сенсоров, чтобы преобразовывать принятые сигналы в общий формат, который адаптирован для узла 211 обработки данных.
Транспортное средство того вида, который показан на фиг.1, обычно содержит множество тормозных систем, таких как замедлитель, горный тормоз, рабочий (ножной) тормоз и тормоз двигателя, и указанные средства 210 могут, как следствие, содержать средства для приема сигналов, представляющих настройки управления, и следовательно, затребованный тормозной момент для каждой тормозной системы соответственно в связи с различными видами приводимых в действие водителем тормозных систем.
Кроме того, устройство 200 содержит средства 213 для приема параметров ситуации дорожного движения в соответствии с тем, как описано ниже, для передачи их в узел 211 обработки данных, для использования в соответствии с тем, что написано ниже.
Термин ситуация дорожного движения в настоящем изобретении предназначен для обозначения окружающей среды дорожного движения или сочетания окружающей среды дорожного движения и одного или нескольких конкретных параметров транспортного средства, таких как, но не ограничиваясь этим, собственная скорость транспортного средства, ускорение и масса транспортного средства, а также относительное расстояние, скорость и ускорение окружающих транспортных средств (измеренные с помощью радара). Окружающая среда дорожного движения может описываться в терминах, например, перекрестка, движения по кругу, прямого участка, виража, езды в гору, езды под гору, вершины холма, долины, неровной или ровной магистрали или дороги, которые будут описаны более подробно ниже.
Эта информация также обычно является уже доступной посредством сетей шин данных в соответствии с тем, как было описано выше, и может, соответственно, например, передаваться в узел 211 обработки данных через приемные средства или через отдельные средства для каждого сенсора или типа сенсора для преобразования в формат, пригодный для узла обработки данных.
Узел 211 обработки данных содержит средства для регистрации времени и/или расстояния, которое прошло транспортное средство между моментом времени, когда мера, предпринятая водителем для отбора крутящего момента двигателя, прекращается, и до момента времени, в который водитель предпринимает меру для приложения тормозного крутящего момента (или чего-либо подобного).
На фиг.3 показана блок-схема, иллюстрирующая один из вариантов осуществления настоящего изобретения. Способ начинается на стадии 300, причем способ продолжается до тех пор, пока водитель требует (положительного) крутящего момента двигателя посредством нажатия на педаль акселератора или маневра другого типа для управления подачей горючего. Как обсуждалось, детектирование того, требует ли водитель крутящего момента двигателя, может считываться с помощью системы управления транспортным средством или посредством считывания реального положения педали/управления. Если узел 211 обработки данных на стадии 300 детектирует, что водитель отпускает педаль акселератора, то есть затребованность для крутящего момента двигателя прекращается, способ продолжается до стадии 301, причем начинается измерение времени, или альтернативно или в дополнение к этому может начинаться измерение расстояния, при этом способ продолжается до стадии 302, на которой определяется, затребовал ли водитель опять положительный крутящий момент двигателя посредством нажатия педали акселератора (или маневра другого управления подачей горючего), или затребовал ли водитель тормозной момент посредством приведения в действие одной из тормозных систем транспортного средств, например, отпуская педаль тормоза или манипулируя, например, устройством управления замедлителем. В течение того времени, когда водитель не требует крутящего момента двигателя или тормозного момента, способ остается на стадии 302 с включенным измерением время/расстояние. Однако если детектируется, что водитель затребовал акселератор или тормоза, то способ продолжается до стадии 303, на которой измерение времени (измерение расстояния) прекращается, и полученное время t (и/или расстояние s) сохраняется. Если способ продолжается до стадии 303, поскольку водитель затребовал акселератор, измеренное значение t (s) устанавливается на ноль и способ возвращается на стадию 300. Однако, если водитель затребовал тормозной момент, то способ продолжается до стадии 304, на которой вычисляется или получается другими способами эталонное значение T, представляющее желательное минимальное время между запросом ускорения и торможения, причем это эталонное значение T определяется на основе текущей ситуации дорожного движения. Затем измеренное значение на стадии 305 сравнивается с эталонным значением. Если t>T, то поведение на стадии 306 рассматривается как показывающее хорошую способность к предвидению. Однако, если t<T, то поведение на стадии 307 рассматривается как показывающее плохую способность к предвидению. Соответственно, узел 211 обработки данных может вычислять мнение относительно способности к предвидению у водителя в текущей ситуации дорожного движения в реальном времени. Результат может выводиться посредством выходных средств 212, например, на шину данных, на передачу в узел дисплея, для отображения непосредственно для водителя, например, в форме предложений об улучшении. Альтернативно, информация о каждом изменении крутящего момента может сохраняться для изучения в будущем, например, владельцем транспортного средства. Полученное определение может в этом случае сохраняться само по себе, при этом рейс транспортного средства в целом может оцениваться впоследствии, и может быть получена статистика о том, насколько часто водитель демонстрирует хорошую способность к предвидению. Альтернативно, определение и/или время (и/или расстояние, а предпочтительно также и скорость транспортного средства) между изменениями крутящего момента (переходами от затребованного крутящего момента двигателя до затребованного тормозного момента) хранится вместе с представлением/данными, представляющими конкретные обстоятельства, которые присутствовали в текущей окружающей среде дорожного движения, для конкретного изменения момента.
Таким образом, впоследствии может осуществляться очень точная оценка водителя во время части рейса или всего рейса, причем, например, можно оценить, при каком типе ситуаций водитель проявляет особенно хорошую/плохую способность к предвидению. Например, поведение водителя может быть разделено на ситуации каждой отдельной окружающей среды, например для правого поворота в городской окружающей среде или для прохождения вершины холма на магистрали.
Очень короткие затребованные действия тормозов в непосредственном сочетании с отбором крутящего момента не должны оцениваться отрицательно, поскольку такое тормозное действие может рассматриваться как предназначенное для дезактивации системы затребования крутящего момента, например, круиз-контроля с постоянной скоростью. Посредством сравнения короткого тормозного действия с внутренней информацией транспортного средства, например, о статусе круиз-контроля, переходящего от "активного" к "пассивному", может быть подтверждено намерение дезактивировать систему.
Величина эталонного времени T в соответствии с тем, как описано выше, может зависеть от ситуации дорожного движения. Она может включать в себя окружающую среду дорожного движения и скорость транспортного средства. Например, минимальное желаемое эталонное время T может быть описано как:
T=f(окружающая среда)·g(скорость)+k,
где k представляет собой константу и f(окружающая среда) представляет собой функцию окружающей среды и представляет собой промежуток времени, задаваемый окружающей средой. Когда осуществляется движение по свободной дороге, желательным является больший промежуток времени по сравнению с городской окружающей средой. g(скорость) представляет собой функцию скорости; g(ν)=c 1 -ν b , где c и b представляют собой константы.
Способ, показанный на фиг.3, является полезным прежде всего при регистрации тенденций в манере вождения водителя, которые показывают уровень агрессивности при вождении и влияние на потребление горючего. Например, является благоприятным отпускание педали акселератора перед движением по кругу или по перекрестку, чтобы проехать свободно некоторое расстояние перед введением в действие тормозного момента. Способ, которым это должно осуществляться, определяется среди других вещей, скоростью возможных транспортных средств, движущихся впереди, замедлением и относительным расстоянием до собственного транспортного средства.
На фиг.4 показана блок-схема, которая может использоваться при обратном изменении крутящего момента, то есть при переходе от затребования тормозного момента к затребованию положительного крутящего момента двигателя. На стадии 400 определяется, что водитель затребовал тормозной момент, при этом позже, на стадии 401, начинается измерение времени (и/или измерение расстояния), когда водитель перестает затребовать тормозной момент, при этом измерение времени прекращается, когда на стадии 403 устанавливается, что водитель затребовал ускорения или тормоза. Если водитель затребовал ускорение, эталонное значение T, представляющее желаемое минимальное время между тормозным моментом и положительным крутящим моментом двигателя на основе текущей ситуации дорожного движения, вычисляется на стадии 404 в соответствии с тем, как было описано выше. Как и раньше, измеренное значение сравнивается с эталонным значением (стадии 405), на которой, если t>T, то поведение на стадии 406, как считается, демонстрирует хорошую способность к предвидению. Однако, если t<T, то поведение на стадии 407 считается проявляющим плохую способность к предвидению.
Точно так, как выше, это может осуществляться в реальном времени, и результат либо может непосредственно показываться водителю, либо может сохраняться для изучения в будущем.
Кроме того, очень короткий затребованный момент, который затребован в непосредственной связи с тормозным моментом, не должен таким же способом, как описано выше, рассматриваться как отрицательный, поскольку такой затребованный момент может рассматриваться как направленный на дезактивацию какой-либо системы замедления, например моторного тормоза для поддержания постоянной скорости. При сравнении короткого отбора крутящего момента двигателя с внутренней информацией транспортного средства, например о статусе моторного тормоза для поддержания постоянной скорости, изменяющемся от "активный" до "пассивный", может также подтверждаться в этом случае намерение дезактивации.
Способ, описанный со ссылкой на фиг.4, приводит к измерению тенденции водителя к агрессивности при вождении, такой как износ тормозов и использование лишних количеств горючего.
Например, если ситуация включает в себя необходимость догнать транспортное средство, ускоряющееся впереди, является неблагоприятным торможение всю дорогу до транспортного средства, движущегося впереди. Вместо этого водитель должен затормозить несколько раньше и заставить транспортное средство свободно катиться на несколько большем расстоянии, до приложения ускоряющего крутящего момента.
Разумеется, различные мнения, приведенные выше, могут объединяться и подвергаться формированию среднего значения. Например, множество таких мнений может подвергаться индивидуальному формированию среднего значения в соответствующих категориях окружающей среды дорожного движения для получения измеренного числового значения, которое обеспечивает общую картину манеры вождения водителя относительно агрессивности, безопасности дорожного движения, сбережения горючего и транспортного средства.
Относительно окружающей среды дорожного движения можно получить очень точное представление окружающей среды транспортного средства. В параллельной заявке на патент Швеции 0601176-1 и имеющей такую же дату подачи, как и настоящая заявка, описано решение для определения во время движения типа пути, который разделяется на сегменты, для маршрута, который проходит транспортное средство. Описанное решение может очень точным образом определять тип множества последовательных или соседних сегментов, таких как правый поворот, левый поворот, прямой участок, езда в гору, езда под гору, и, в особенности, вместе с данными относительно времени и/или скорости осуществлять точную классификацию дистанции. Классификация может, например, состоять из езды на холостом ходу, отбора привода (PTO), движения в колонне, движения в пробке, центра города, городской среды, неровной и/или прямой или имеющей виражи дороги, прямой и ровной или неровной дороги.
Устройство 200 в соответствии с настоящим изобретением может содержать средства для приема классификации окружающей среды от устройства в соответствии с указанной заявкой на патент.
Альтернативно, устройство 200 в соответствии с настоящим изобретением может содержать средства для осуществления описанной классификации окружающей среды дорожного движения. Эти средства могут, например, состоять из узла 211 обработки данных, при этом устройство 200 снабжается соответствующими средствами, чтобы быть способным к приему информации, которая необходима для классификации окружающей среды, например, через шину данных. При использовании очень точного описания окружающей среды дорожного движения (окружающей среды транспортного средства) таким способом способность к предвидению у водителя транспортного средства может оцениваться для каждого отдельного типа сегмента, такого как левые повороты или прохождения кругов. При указанном определении можно также принять во внимание, что дорога выглядит похожей на то, что было раньше, например круг, например, если она прямая, имеет виражи или неровная. Соответственно, это имеет результатом то, что может быть осуществлен очень точный анализ поведения водителя.
Другие способы оценки окружающей среды дорожного движения включают в себя, например, использование системы позиционирования и картографических данных и/или инклинометра.
В соответствии с тем, как было описано выше, настоящее изобретение может использоваться для установления обратной связи для водителя в реальном времени. В этом случае транспортное средство может снабжаться дисплеем, который постоянно показывает способность к предвидению у водителя, например как процент в диапазоне от 0 до 100, причем, например, результат 85 % и выше указывает на очень хорошую способность к предвидению. Соответственно, водитель может "соревноваться" сам с собой в безопасном и экономном вождении. Информация может также использоваться руководителями водителей для определения того, какой водитель нуждается в помощи для улучшения его вождения, или для идентификации водителя, который работает особенно хорошо, и для его возможного награждения.
Кроме того, настоящее изобретение может объединяться с другими системами для оценки водителей транспортных средств.
В параллельной заявке на патент Швеции 0601173-8, имеющей такую же дату подачи, что и настоящая заявка, описано решение для оценки способности водителя транспортного средства к использованию тормозов транспортного средства. Настоящее изобретение может использоваться с преимуществами вместе с указанным решением.
Кроме того, в параллельной заявке на патент Швеции 0601174-6, имеющей такую же дату подачи, что и настоящая заявка, описана другая система для оценки водителя, вместе с которой настоящее изобретение может использоваться с преимуществами. Настоящая заявка на патент описывает устройство для оценки способности водителя транспортного средства к вождению с эффективным расходованием горючего посредством изучения его потребления водителем в конкретных случаях, таких как подъемы, ровные участки и спуски.
Посредством объединения множества различных процедур для оценки водителя транспортного средства может осуществляться очень точное определение квалификации водителя транспортного средства, если использовать их вместе.
Как предполагается, транспортное средство может быть оборудовано для непрерывной передачи данных в центр мониторинга, при этом описанная выше оценка может осуществляться в центре мониторинга вместо транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ СПОСОБНОСТИ ПРОГНОЗА ТОРМОЖЕНИЯ | 2009 |
|
RU2471241C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| СПОСОБ ВОЗВРАЩЕНИЯ РЕГУЛИРОВАНИЯ КРУТЯЩЕГО МОМЕНТА ИЗ ОГРАНИЧЕННОГО СОСТОЯНИЯ В НЕОГРАНИЧЕННОЕ СОСТОЯНИЕ | 2009 |
|
RU2482989C2 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СПОСОБ АДАПТАЦИИ АВТОМАТИЧЕСКОЙ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ НА ТРАНСПОРТНОМ СРЕДСТВЕ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2007 |
|
RU2443586C2 |
| АВТОМОБИЛЬ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2003 |
|
RU2290330C2 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2270771C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686977C2 |
| СПОСОБ ЗАПУСКА И ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2606523C2 |

Настоящее изобретение относится к устройству для определения способности к предвидению у водителя транспортного средства в ситуации дорожного движения. Технический результат - обеспечение оценки способности к предвидению у водителя транспортного средства в ситуации дорожного движения. Устройство содержит средство для определения того, предпринял ли водитель транспортного средства первую меру, указанная первая мера представляет собой меру торможения транспортного средства или меру отбора положительного крутящего момента двигателя, противодействующую указанной первой мере. Кроме того, устройство содержит средство для определения первого момента времени, в который заканчивается указанная мера, средство для определения второго момента времени, в который водитель предпринимает меру, противодействующую указанной законченной мере, средство для приема, по меньшей мере, одного значения эталонного параметра, представляющего окружающую среду транспортного средства, или, по меньшей мере, одного значения параметра, по меньшей мере, от одного внутреннего сенсора транспортного средства, с помощью которого может определяться значение эталонного параметра, представляющего окружающую среду транспортного средства, и средство для сравнения значения, представляющего разницу между указанным вторым моментом времени и указанным первым моментом времени, со значением эталонного параметра и определения на основе этого сравнения значения параметра, представляющего способность к предвидению у водителя. 2 н. и 12 з.п. ф-лы, 5 ил.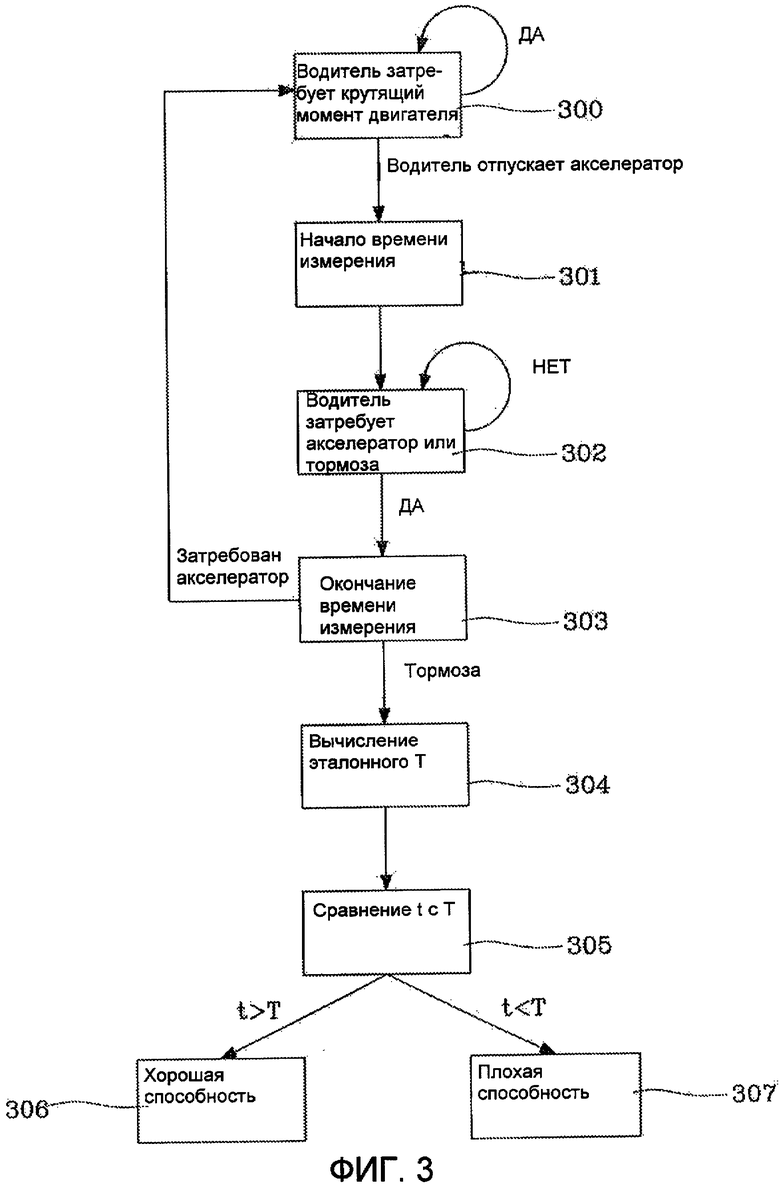
1. Устройство для определения способности к предвидению у водителя транспортного средства в ситуации дорожного движения, содержащее:
средство для определения того, предпринял ли водитель транспортного средства первую меру, представляющую собой меру торможения транспортного средства или меру создания положительного крутящего момента двигателя, противодействующую первой мере,
средство для определения первого момента времени, в который заканчивается указанная мера,
средство для определения второго момента времени, в который водитель предпринимает меру, противодействующую законченной мере,
средство для приема, по меньшей мере, одного значения эталонного параметра, представляющего окружающую транспортное средство среду, или, по меньшей мере, одного значения параметра от, по меньшей мере, одного внутреннего сенсора транспортного средства, с помощью которого определяется значение эталонного параметра, которое представляет окружающую транспортное средство среду, и
средство для сравнения значения, представляющего разницу между вторым моментом времени и первым моментом времени со значением эталонного параметра и для определения на основе этого сравнения значения параметра, представляющего способность водителя к предвидению.
2. Устройство по п.1, в котором указанная мера выключения положительного крутящего момента двигателя представляет собой меру приведения в действие управления регулятором подачи горючего.
3. Устройство по п.1 или 2, в котором указанная разница состоит из представления времени или расстояния, которое проходит между прекращением принятия первой меры и принятием второй меры.
4. Устройство по п.1, в котором первая и вторая меры соответственно предпринимаются посредством, по меньшей мере, одного устройства, выбранного из группы, состоящей из педали акселератора, устройства для управления подачей горючего, педали тормоза, устройства управления тормозами, круиз-контроля, замедлителя, моторного тормоза для поддержания постоянной скорости.
5. Устройство по п.1, дополнительно содержащее средство для разделения дистанции пути, который проходит транспортное средство, на сегменты, средство для определения того, что сегмент начался,
средство для определения эталонного направления движения,
средство для приема на указанном сегменте, по меньшей мере, одного значения параметра направления, который состоит из представления направления движения транспортного средства или с помощью которого определяется представление направления движения транспортного средства,
средство для определения того, что транспортное средство достигло конца сегмента,
средство для определения из принятых значений параметра направления типа сегмента и
средство для определения окружающей транспортное средство среды посредством одного или множества последовательных или соседних сегментов.
6. Устройство по п.5, в котором значения параметра генерируются внутренними сенсорами транспортного средства.
7. Устройство по п.5 или 6, в котором тип сегмента представляет собой любой сегмент, выбранный из группы, состоящей из: правого поворота, левого поворота, правого виража, левого виража, прямого участка, движения по кругу, вершины холма, долины, перекрестка, правого поворота на перекрестке, левого поворота на перекрестке, ровной дороги, движения в гору и движения под гору.
8. Устройство по п.1, содержащее средство для хранения значения параметра, представляющего способность к предвидению у водителя, вместе с представлением окружающей транспортное средство среды.
9. Устройство по п.8, содержащее средство для хранения данных для множеств ситуаций дорожного движения.
10. Устройство по п.1, содержащее средство для передачи значения параметра, представляющего способность к предвидению у водителя, на средства дисплея, размещенные на транспортном средстве.
11. Устройство по п.1, содержащее средство для передачи значения параметра, представляющего способность к предвидению у водителя, на удаленный центр мониторинга.
12. Устройство по п.1, в котором одно из указанных средств или их множество, по меньшей мере, частично состоит из компьютерной программы, причем устройство, по меньшей мере, частично состоит из программного продукта для компьютера, содержащего считываемую компьютером среду и компьютерную программу, содержащуюся на машиночитаемом носителе.
13. Устройство по п.12, в котором машиночитаемый носитель состоит из одного или нескольких устройств, выбранных из группы, состоящей из ПЗУ, программируемого ПЗУ, перепрограммируемого ПЗУ, флэш-памяти и ЭСППЗУ.
14. Транспортное средство, содержащее устройство по любому из пп.1-13.
| WO 00/07150 А1, 10.02.2000 | |||
| DE 10056756 A1, 23.05.2002 | |||
| FR 2859687 A1, 18.03.2005 | |||
| Устройство для контроля характеристик движения транспортного средства | 1988 |
|
SU1585816A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство для регистрации времени работы транспортного средства в разных режимах | 1986 |
|
SU1376112A1 |
| SU 1683048 A2, 07.10.1991. | |||

