Область техники, к которой относится изобретение
Настоящее изобретение относится к системам для классификации окружающей среды, в котором транспортное средство движется, и, в частности, к устройству для классификации во время движения на, по меньшей мере, части расстояния пути транспортного средства в соответствии с преамбулой пункта 1 формулы изобретения.
Уровень техники
При вождении тяжелых транспортных средств, таких как грузовые автомобили, автобусы и т.п., экономичность транспортного средства со временем оказывает усиливающееся возрастающее влияние на прибыльность предприятия, на котором используют транспортное средство. Помимо затрат на приобретение транспортного средства наибольшие статьи расходов на транспортное средство состоят из затрат на топливо и затрат на техническое обслуживание. Эти затраты часто являются взаимосвязанными, то есть транспортное средство, которое интенсивно используют, потребляет больше топлива и подвергается большему износу с повышением в результате затрат на техническое обслуживание. Однако существующая проблема для тех компаний, которые интенсивно используют транспортные средства в своем бизнесе, заключается в трудности определения, например, какая часть расхода топлива является следствием невнимательного вождения и какая часть является следствием неблагоприятной окружающей среды для движения транспорта, такой как чрезвычайно холмистый рельеф и/или городская среда. Другим примером, где указанная необходимость возникает, является, например, случай, когда лизинговая компания может устанавливать лизинговую премию за окружающую среду, в которой транспортное средство будет использоваться, например, преимущественно в городской среде или преимущественно в среде дороги скоростного движения, при этом, однако, трудно контролировать, что действительное использование соответствует обещанному использованию.
Следовательно, имеется необходимость в возможности определения типа окружающей среды для движения транспорта, в которой транспортное средство движется или двигалось, и в предшествующем уровне техники имеются решения, с помощью которых в большей или меньшей степени можно определять окружающую среду для движения транспорта, в которой находится транспортное средство. В большом количестве этих систем используется позиционирующая система для отображения на заранее загруженной карте текущего положения транспортного средства или положений, в которых транспортное средство находилось во время движения. Помимо чисто географических данных эта карта также может содержать информацию о предписаниях по ограничению скорости, погоде и т.д. Однако далеко не все транспортные средства снабжены дорогими системами позиционирования, а иногда на транспортных средствах даже полностью отсутствует картографическая информация.
В решении другого типа делается попытка описать выполняемые водителем маневры путем анализа последовательностей экстремальных точек при ускорениях. Даже если этим способом можно показать, как часто и в какой степени водитель использует педаль акселератора, этим способом ничего не выявляется относительно причин ускорений.
В соответствии с этим имеется необходимость в устройстве, с помощью которого можно описывать и запоминать геометрию окружающей среды, в которой находится или находилось транспортное средство, и тем самым правильно описывать имеющуюся окружающую среду для движения транспорта.
Сущность изобретения
Задача настоящего изобретения заключается в создании устройства для определения, во время движения вместе с транспортным средством, типа, по меньшей мере, части расстояния движения транспортного средства, которым разрешается указанная выше проблема.
Эта и другие задачи решаются в соответствии с настоящим изобретением с помощью устройства согласно пункту 1 формулы изобретения.
В соответствии с настоящим изобретением предложено устройство для определения, во время движения вместе с транспортным средством, типа расстояния пути, на всем протяжении которого транспортное средство движется, в котором осуществляется разделение расстояния на сегменты. Устройство содержит средство для определения того, что сегмент начался, средство для определения опорного направления движения в начале сегмента, средство для приема по меньшей мере значения параметра движения, который образует представление направления движения транспортного средства или с помощью которого представление направления движения транспортного средства может быть определено, средство для определения, достигло ли транспортное средство конца сегмента, и средство для определения типа сегмента на основании указанных принимаемых значений параметра направления.
Является преимуществом то, что рейс транспортного средства может быть разделен на сегменты различных типов (например, правый поворот, левый поворот, правосторонняя кривизна, левосторонняя кривизна, прямой участок, объезд, вершина холма, долина, пересечение, правый поворот на пересечении, левый поворот на пересечении, плоская дорога, уклон в гору, уклон под гору), и в соответствии с настоящим изобретением эти типы могут быть определены простым способом для обеспечения возможности классификации окружающей среды транспортного средства.
Благодаря определению типа большого количества последовательных или соседних сегментов удовлетворительная классификация расстояния может быть выполнена на основании указанного определенного типа сегмента. Классификация может состоять, например, из работы на холостом ходу, отбора мощности, формирования колонны, очереди, центра города, городской зоны, волнистой и/или прямой или извилистой дороги, прямой и горизонтальной или волнистой дороги.
Каждый тип сегмента может быть запомнен вместе с идентификационной информацией для сегмента, например последовательным порядковым номером сегмента. Предпочтительно, чтобы тип сегмента для всей дороги или участков дороги, по которой транспортное средство движется, мог быть запомнен и впоследствии оценен.
Указанное изменение направления может быть горизонтальным и/или вертикальным. Преимущество заключается в том, что рейс транспортного средства можно описать в трех измерениях.
Для каждого сегмента могут быть вычислены расстояние, пройденное транспортным средством в продолжение сегмента (длина дуги), радиус для осуществленного движения транспортного средства в продолжение сегмента и/или мгновенная и/или средняя скорость транспортного средства в продолжение сегмента. Преимущество заключается в том, что можно оценивать очень точное описание окружающей среды. Кроме того, это позволяет определять способность водителя проходить конкретный сегмент путем сравнения того, насколько быстро/медленно водитель преодолел/прошел сегмент с заданными критериями.
Краткое описание чертежей
На чертежах:
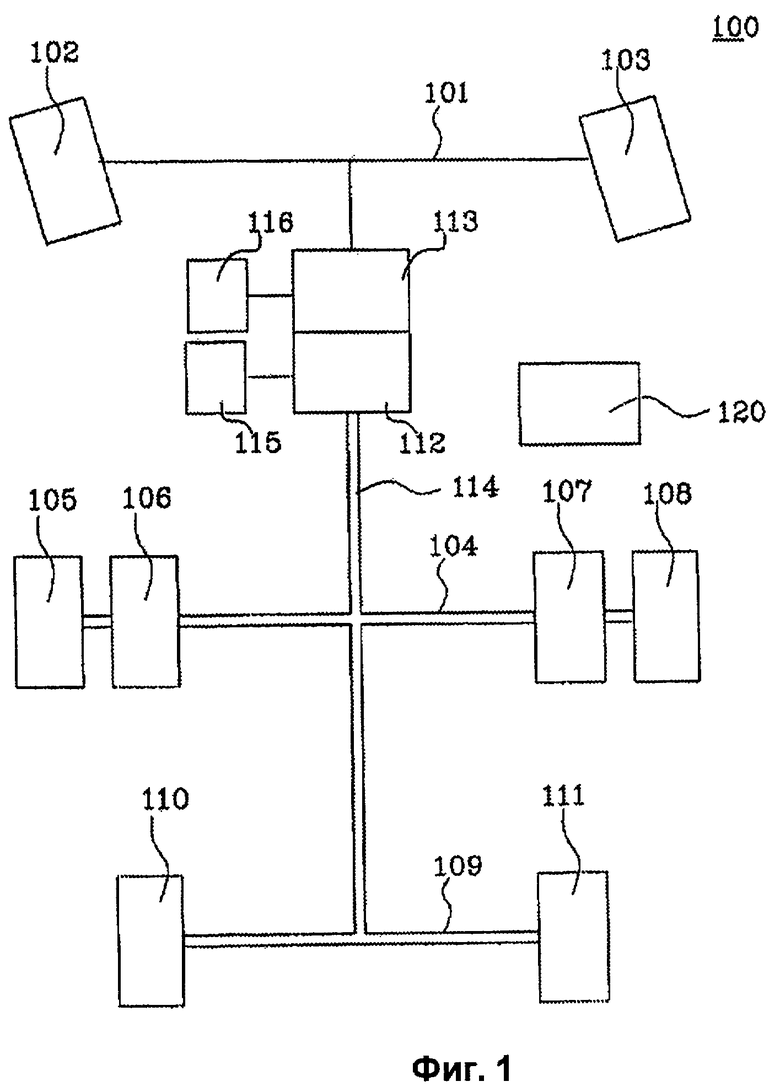
фиг.1 - схематическая иллюстрация системы управления для транспортного средства, где, предпочтительно, настоящее изобретение может быть использовано;
фиг.2a-b - иллюстрация примера устройства согласно настоящему изобретению;
фиг.3 - иллюстрация примера окружающей среды транспортного средства; и
фиг.4 - иллюстрация примера выходного сигнала с гиродатчика, установленного на транспортном средстве.
Подробное описание примеров осуществлений
В этом описании термин «внутренние датчики транспортного средства» означает датчики, которые только получают данные на основании относительных движений транспортного средства, то есть изменений при движениях от одного момента времени до другого, и которые не используют информацию от внешних систем, таких как системы позиционирования или базы картографических данных. Такие внутренние датчики транспортного средства могут состоять, например, из датчиков поперечного ускорения, то есть датчиков, вырабатывающих сигналы, с помощью которых можно определять быстроту изменения скорости транспортного средства в поперечном направлении для определения, например, подвергается ли транспортное средство опасности опрокидывания вследствие выполнения водителем неосторожного маневра. Кроме того, датчики могут содержать датчики скорости колес, то есть датчики для выработки сигналов, с помощью которых можно определять скорость вращения колес и пройденное расстояние, датчики угла поворота, которые вырабатывают сигналы, с помощью которых можно определять угол управляемых колес относительно продольной оси транспортного средства, и датчиковое средство для выработки сигналов, по которым можно вычислять скорость поворота вокруг вертикальной оси, то есть как быстро транспортное средство поворачивает.
На фиг.1 схематически показана система управления для транспортного средства 100, вместе с которым настоящее изобретение может быть использовано. Транспортное средство 100 содержит переднюю ось 101 с управляемыми колесами 102, 103, задний приводной вал 104 с ведущими колесами 105-108 и заднюю ось 109 уравнителя давления с колесами 110, 111. Кроме того, транспортное средство содержит двигатель 113, соединенный с коробкой 112 передач, которая приводит в движение приводной вал 104 посредством выходного вала 114 из коробки передач.
Коробка 112 передач и двигатель 113 управляются блоками 115, 116 управления, соответственно, которые управляются основным 117 блоком управления. Система 116 управления двигателем управляет функциями двигателя транспортного средства, которые могут состоять, например, из впрыска топлива и торможения двигателем. Управление основано на ряде входных сигналов, которые могут состоять из сигналов с рычага (непоказанного) управления дроссельной заслонкой (положения педали акселератора), датчика скорости и системы управления торможением. Система 115 управления коробкой передач управляет функциями коробки передач, при этом в случае использования автоматической коробки передач управление переключением передач может осуществляться на основании входного сигнала с датчиков скорости, при ручном переключении передач управление переключением может осуществляться на основании входного сигнала с избирателя переключения передач (рычага переключения передач).
Кроме того, транспортное средство содержит систему 120 управления торможением, которая управляет функциями тормоза транспортного средства, например, осуществляет автоматическое вычисление нагрузки для того, чтобы независимо от нагрузки заданное положение педали всегда могло приводить к одному и тому же эффекту торможения. Из системы управления торможением управляющие сигналы передаются на системные модули (не показаны), рассредоточенные на шасси, где электрические управляющие сигналы используются, например, для регулирования тормозного давления.
Транспортное средство показанного на фиг.1 типа обычно включает в себя, помимо указанных выше, ряд дополнительных блоков управления, см., например, Международную заявку WO 01/86459. Поэтому описанные выше блоки управления образуют только примеры того, что может иметься на транспортном средстве. Конечно, специалисту в данной области техники понятно, что два или большее количество описанных выше блоков управления могут быть объединены в один отдельный блок управления.
Как упоминалось выше, все более важно иметь возможность правильно определять, какая окружающая среда или геометрия кажется вероятной для движущегося транспортного средства, например, чтобы иметь возможность оценивать окружающую среду, в которой транспортное средство движется, и расход топлива в зависимости от окружающей среды, или чтобы иметь возможность оценивать способность водителя вести транспортное средство экономически эффективным способом.
Настоящим изобретением предоставляется устройство, которое позволяет удовлетворительно оценивать указанные выше и другие параметры. В соответствии с изобретением расстояние, на всем протяжении которого транспортное средство движется, разделяется на сегменты, при этом каждый сегмент образуется конкретным элементом, таким как правый поворот, левый поворот, правосторонняя кривая, левосторонняя кривая или прямой участок. Предпочтительно, чтобы это разделение на сегменты выполнялось автоматически во время движения с помощью устройства согласно изобретению, обнаруживающего, когда сегмент начинается и когда он заканчивается, и определяющего тип сегмента. Это обнаружение будет описано более подробно ниже. Как также будет пояснено ниже, не считая указанных выше основных элементов, множество последовательных сегментов может обозначать сложный элемент, такой как объезд, который (при правостороннем движении) характеризуется коротким правым поворотом, за которым следует более короткий или более длинный левый поворот, за которым следует дополнительный короткий правый поворот.
Изобретение будет описано более подробно со ссылками на фиг.2a-b, при этом на фиг.2а показано транспортное средство из фиг.1, снабженное устройством 200 согласно изобретению.
Устройство 200 включает в себя средство для приема сигналов, формируемых внутренними датчиковыми средствами транспортного средства, которые согласно указанному выше могут состоять, например, из сигналов с датчика 201 поперечного ускорения, датчиков 202-203 скорости колеса, на основании которых может быть получено ускорение транспортного средства, датчика 204 угла поворота и датчикового средства 205 для выработки скорости поворота транспортного средства вокруг вертикальной оси, или сигналов, на основании которых может быть вычислена скорость поворота вокруг вертикальной оси. В показанном примере осуществления гиродатчик 205 используется для получения информации о скорости поворота транспортного средства вокруг вертикальной оси (скорости изменения направления). С помощью гиродатчика в каждой точке можно определять, как поворачивает транспортное средство, то есть скорость поворота вокруг вертикальной оси. При использовании гиродатчика эту информацию обычно получают выраженной в радианах в секунду. На фиг.4 показан типичный выходной сигнал с гиродатчика, который будет пояснен более подробно ниже.
Однако вместо использования гиродатчика скорость поворота вокруг вертикальной оси можно получать от других датчиков транспортного средства, например от указанных датчиков 202-203 скорости колеса, при этом относительная разность скоростей колес может быть использована для вычисления скорости поворота вокруг вертикальной оси.
Кроме того, суммарное изменение направления транспортного средства в течение заданного временного интервала можно получать путем интегрирования скорости поворота вокруг вертикальной оси по указанному временному интервалу. Это изменение направления может быть положительным, отрицательным или близким к нулю, при этом положительное изменение и отрицательное изменение отражают изменение направления вправо или влево соответственно (или наоборот). Следовательно, основные сегменты трех типов для расстояния, на протяжении которого движется транспортное средство, могут быть определены следующим образом: правый поворот, левый поворот и прямо вперед соответственно.
Путем непрерывного разделения протяженности рейса транспортного средства на сегменты этих типов и запоминания типов для последовательных сегментов может быть выполнен анализ окружающей среды транспортного средства. Этот анализ может быть выполнен по существу в реальном времени или впоследствии путем оценивания n последних сегментов, в результате чего может быть выполнен анализ участков или всей протяженности рейса транспортного средства.
Устройство 200 согласно изобретению показано более подробно на фиг.2b и содержит средство 210 для приема сигналов с упомянутых выше датчиков и, если требуется, преобразования этих сигналов в формат, подходящий для блока 211 обработки данных. Указанное средство 210 может содержать, например, точку соединения для каждого желаемого датчика, соответственно, при этом различные датчики могут иметь разные интерфейсы. Вследствие этого устройство может содержать средства, такие как аналого-цифровые преобразователи или приемники для приема передаваемых по беспроводной связи сигналов датчиков, для преобразования сигналов из этих различных форматов в общий формат, который является подходящим для указанного блока 211 обработки данных. В качестве варианта указанное средство 210 может образовывать соединение шины данных для приема сигналов датчиков с помощью шины данных, такой как, например, любая из шин данных с форматами по протоколу CAN (локальная сеть контроллеров), TTCAN или FlexRay, в силу чего сигналы датчиков могут быть переданы в общем формате передачи данных. Сигналы датчиков могут поставляться в желаемом формате шины данных непосредственно датчиковым средством или блоком (блоками) управления (не показаны). Когда указанный блок 211 обработки данных принимает сигналы датчиков, он может на основании сигналов, принимаемых с одного или нескольких из указанных датчиков 201 бокового ускорения, датчиков 202-203 скорости колеса, датчика 204 угла поворота и гиродатчика 205, путем соответствующего вычисления определять, какой сегмент начинается. Указанный блок 211 обработки данных может состоять, например, из процессора, который управляется действующими командами, такими как компьютерная программа, созданная с помощью соответствующего языка программирования и сохраняемая в запоминающем средстве, при этом указанное запоминающее средство встроено в процессор или соединено с ним. Указанное запоминающее средство может состоять, например, из одного или нескольких из группы: постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), флэш-память, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ). Устройство 200 может состоять из блока обработки данных с встроенным запоминающим устройством и встроенным шинным интерфейсом для шины данных указанного выше типа и поэтому может быть выполнено очень компактным. Устройство 200 также содержит средство 212 вывода для вывода обработанных данных, например, для непрерывной передачи данных в центр управления автопарка, который является общим для большого количества транспортных средств, или на дисплейное средство на транспортном средстве, такое как дисплей, или звуковоспроизводящее средство, такое как громкоговоритель, для осуществления обратной связи к водителю транспортного средства. Выполняемое определение того, начинается ли сегмент, можно осуществлять, например, таким способом, в соответствии с которым определяют, что скорость поворота вокруг вертикальной оси превышает определенное заданное пороговое значение или что изменение направления в одну и ту же сторону происходит в течение определенного времени. Например, начало сегмента также может возникать при перемене знака изменения направления или когда скорость поворота вокруг вертикальной оси падает ниже определенного порогового значения от более высокого значения (например, когда конец кривой переходит в прямой участок). Когда определяется, что сегмент начинается, для сегмента находится опорное направление движения. Это опорное направление движения может состоять, например, из текущего направления движения транспортного средства. Это опорное направление движения не должно быть в любом случае абсолютным, а только должно использоваться для определения относительного изменения направления транспортного средства в продолжение сегмента. Однако как вариант направлению движения транспортного средства в качестве опорного направления движения также может быть использовано абсолютное направление, такое как север по компасу. В продолжение сегмента устройство 200 непрерывно или через определенные или заданные интервалы принимает значения параметра, которые образуют представление направления транспортного средства или с помощью которых представление направления транспортного средства может быть определено. В этом примере сигналы скорости поворота вокруг вертикальной оси получают с гиродатчика, как выше, например, через упомянутую выше шину данных. Когда устройство принимает значение параметра, то оно сравнивается с одним или множеством предшествующих значением для определения, может ли сегмент считаться законченным. Если определяется, что сегмент не закончился, сбор значений параметра продолжается, и эти значения могут запоминаться во внутреннем запоминающем средстве или запоминающем средстве, соединенном с устройством, таким как компьютерная память любого из упомянутых выше типов или энергонезависимая память, например оперативное запоминающее устройство, до тех пор, пока сегмент не будет считаться законченным. Вместе с тем после сбора параметров или в случае, когда сегмент закончился, производится интегрирование скорости поворота вокруг вертикальной оси для получения абсолютного изменения угла транспортного средства, претерпеваемого в продолжение сегмента. Затем полученное изменение угла используется для определения типа сегмента из числа указанных выше элементов. Как представляется, вследствие этого определение типа может быть осуществлено уже в продолжение сегмента, как только будет получено достаточное количество значений параметра. Например, определение типа можно осуществлять путем сравнения полученного изменения угла с таблицей разностного изменения интервалов направления, которое отражает соответствующий тип элемента.
Как только сегмент заканчивается, это автоматически может означать начало следующего, то есть начало сегмента может быть определено как место, на котором предшествующий сегмент заканчивается. Таким образом, всю протяженность рейса транспортного средства или участок можно разделить на сегменты различных типов. Кроме того, устройство может быть приспособлено для запоминания типов различных сегментов, предпочтительно с соответствующей идентификационной информацией для каждого сегмента, и эта идентификационная информация в самом простейшем осуществлении ее может состоять из последовательных чисел, то есть сегмент 1 получает №1, сегмент 2 получает №2 и т.д.
Затем ряд сегментов определенного типа может быть использован для классификации окружающей среды транспортного средства. Например, многочисленные сегменты прямых участков могут быть интерпретированы так, как если бы транспортное средство двигалось по участку автострады.
Однако настоящее изобретение является еще более выгодным, если совместно с определением типа сегмента собираются и используются дополнительные данные. Например, пройденное расстояние может использоваться при оценивании. В таком случае некоторое количество сегментов определенного типа, например правых поворотов и левых поворотов с большими углами, чем опорный угол, можно сравнивать с расстоянием, пройденным транспортным средством, для определения типа окружающей среды, в которой транспортное средство движется, такого как городская среда или дорога скоростного движения. Кроме того, можно выполнять сравнение концентраций элементов для различных участков пути с целью анализа, находилось ли транспортное средство в разной окружающей среде во время рейса.
Дополнительная возможность повышения качества информации заключается в объединении упомянутой выше информации с информацией о скорости, относящейся к самому последнему пройденному расстоянию, или времени, затраченному транспортным средством при прохождении определенного расстояния. Как показано на фиг.2 и установлено выше, сигналы могут приниматься, например, с датчиков 202-203 скорости колеса. Кроме расстояния, пройденного транспортным средством в продолжение сегмента, на основании этих сигналов также можно вычислять скорость транспортного средства. В результате для каждого начатого сегмента, не только для сегмента экономичного типа (прямо, влево, вправо), как изложено выше, но также для суммарного расстояния, пройденного транспортным средством в продолжение сегмента (длины дуги), и суммарного углового изменения, осуществленного транспортным средством в продолжение сегмента, можно получать намного более усложненное описание окружающей среды транспортного средства и, соответственно можно делать более определенные оценки относительно того, находится ли транспортное средство в городской среде, среде дороги скоростного движения, работает ли двигатель транспортного средства на холостом ходу или оно стоит в очереди. Например, если транспортному средству потребовалось много поворотов на 90° в сочетании с низкой средней скоростью и транспортное средство сделало большое количество остановок в течение последней пары минут, то с повышенной уверенностью можно установить, что транспортное средство находится в городской среде.
Кроме того, на основании длины дуги и изменения угла радиус текущего сегмента можно получать с помощью простого геометрического вычисления, в результате чего радиус может быть использован при принятии решений, представляет ли элемент поворот при пересечении дорог (небольшой радиус) или кривую на дороге скоростного движения (большой радиус).
Вместо описанного запоминания длины сегмента (длины дуги) в качестве варианта используется время движения транспортного средства на протяжении сегмента и/или для описания элемента можно использовать скорость транспортного средства в продолжение сегмента.
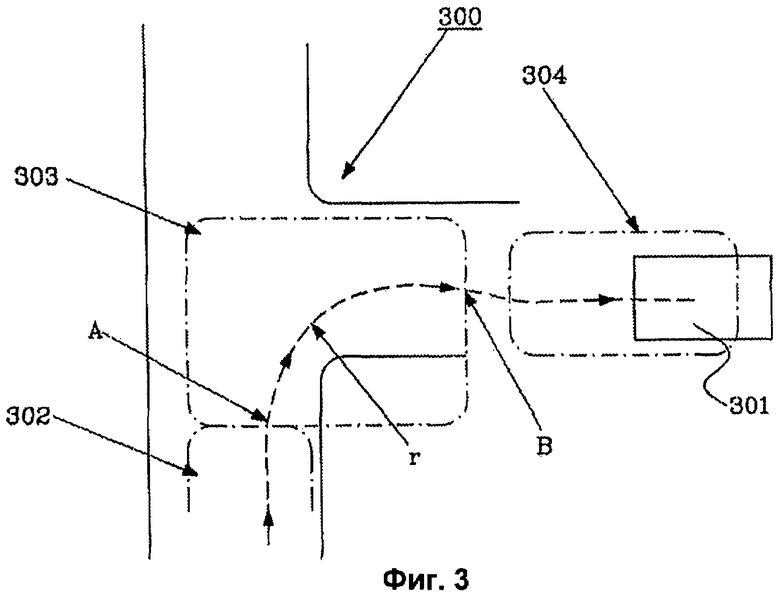
На фиг.3 показан пример способа разделения участка дороги на сегменты. На фигуре изображено пересечение дорог, более конкретно T-образный перекресток 300. Как показано на фигуре, транспортное средство 301 только что выполнило правый поворот. До того, как транспортное средство 301 достигло пересечения, транспортное средство было на сегменте 302, представлявшем собой сегмент прямого участка. Позже в точке А устанавливается, например, с помощью указанного выше порогового значения, что когда транспортное средство начало правый поворот, прямой участок 302 закончился в то же время, когда начался сегмент 303 правого поворота с радиусом r. Как только транспортное средство достигает всего лишь небольшой части на сегменте поворота, таком как сегмент 303 правого поворота, то уже можно определить тип сегмента и также радиус r. Когда правый поворот заканчивается в точке В, где еще раз можно использовать пороговое значение для определения изменения направления/скорости изменения направления, сегмент 303 считается законченным, при этом длина сегмента и угол для сегмента запоминаются, после чего начинается другой сегмент 304 прямого участка.
С помощью информации о радиусе кривой для данного сегмента можно осуществлять удовлетворительную классификацию окружающей среды для движения транспорта. Прямая дорога обычно показывается сегментом, относящимся к типу «прямой» (то есть радиус r→∞). Для каждого сегмента, который проклассифицирован как кривая (правосторонняя или левосторонняя), радиус может быть определен и запомнен.
Чтобы иметь возможность осуществлять удовлетворительную классификацию окружающей среды транспортного средства, известные геометрические данные о действительной окружающей среде для движения транспорта можно использовать для классификации кривых правильным образом, например, как кривую дороги скоростного движения или поворота на пересечении. Например, как упоминалось ранее, поворот на пересечении образует значительное изменение направления в сочетании с небольшой длиной дуги (малым радиусом). Каждое пересечение можно не только последовательно обнаруживать, но также можно определять, поворачивалось ли транспортное средство налево или направо и, кроме того, с какими углом, радиусом и длиной дуги.
Как упоминалось выше, множество последовательных сегментов также можно использовать для классификации более сложных структур. Это поясняется примером со ссылкой на фиг.4, на которой показан типичный выходной сигнал с гиродатчика, и этот выходной сигнал в цифровой форме может быть обработан блоком обработки данных в устройстве 200 в соответствии с нижеследующим. По оси Y показана скорость поворота вокруг вертикальной оси в положительном и отрицательном направлениях, тогда как по оси X представлено время. Когда транспортное средство движется прямо вперед, сигнал гиродатчика выглядит подобным сигналу на интервале I. Предпочтительно задавать пороговое значение так, чтобы скорости поворота вокруг вертикальной оси не превышали порогового значения, представляющего движение прямо вперед. На интервале II скорость поворота вокруг вертикальной оси больше, чем пороговое значение, и является отрицательной, и это означает, что транспортное средство выполняет правый поворот. За этим правым поворотом сразу же следует интервал III с левым поворотом (скорость поворота вокруг вертикальной оси>0) до интервала IV, на котором еще раз выполняется небольшой правый поворот. Эта последовательность является типичной для транспортного средства, использующего левый поворот при объезде, и, следовательно, изучение признаков различных элементов движения транспорта между двумя элементами движения транспорта типа «прямо» вместе с достаточно большими длинами дуг можно использовать для обнаружения того, описывает ли ряд обнаруженных элементов объезд. Конечно, в качестве варианта объезд может быть разделен на различные сегменты его: въезд, круговое движение и сегменты выезда соответственно.
Кроме того, на основании анализа радиусов закруглений дороги может быть определена кривизна для произвольной дороги. При использовании гиродатчика можно обнаруживать очень большие радиусы, величиной порядка 600 м или больше, что к тому же обуславливает изменение длины сегмента от нескольких метров или меньше до тысяч метров для кривых или прямых участков. Поэтому, благодаря возможности получения очень точного представления сегментов, в соответствии с настоящим изобретением можно получать очень точное представление относительно окружающей среды, в которой движется транспортное средство, и как изменяется окружающая среда при движении транспортного средства. Например, можно видеть, сколь долгое время рейс транспортного средства осуществлялся в городской среде, среде дороги скоростного движения и/или среде автомагистрали.
До сих пор движения транспортного средства описывались только в поперечном направлении, но, однако, изобретение также применимо к вертикальным движениям. При известности текущего крутящего момента двигателя, трения в двигателе, суммарного передаточного числа, радиусов ведущих колес, ускорения и транспортировочной массы транспортного средства может быть определена результирующая сумма всех внешних сил, оказывающих влияние на транспортное средство (таких как сопротивление качению, сопротивление воздуха и сила тяжести). Эта сумма в настоящей заявке называется сопротивлением поступательному движению. С помощью известных моделей для качения, а также сопротивления воздуха может быть оценен вклад силы тяжести в сопротивление поступательному движению, и вследствие этого может быть описан уклон дороги. Кроме этого способа оценивания уклона в предшествующем уровне техники имеются многие другие, и это большое количество можно использовать совместно с настоящим изобретением. Иначе говоря, действительный уклон дороги относительно горизонтальной плоскости может быть определен в каждый данный момент времени. Путем анализа хода процесса изменений уклона также можно определять холмистость дороги и подразделять ее на различные сегменты уклона. В таком случае холмистость для сегмента дороги может быть определена совместно с расстоянием или временем. Помимо определения уклона дороги информация также может быть использована для обнаружения особых случаев уклонов: вершин холмов и долин, при этом они отображаются в виде перемен знака уклона.
Пример устройства для оценивания уклона представлен в патентной заявке №0600370-1 Швеции под названием “Metod för bestämning av lutningen för en väg” (на английском языке: “Method for estimating the inclination of a road”) с датой подачи 20 февраля 2006 г., в которой описано устройство для оценивания уклона грунта, по которому движется транспортное средство. Устройство включает в себя средство для приема по меньшей мере первого значения параметра, которое образует представление первой оценки уклона или с помощью которого может быть сформирована первая оценка уклона, и средство для приема по меньшей мере второго значения параметра, которое образует представление второй оценки уклона или с помощью которого может быть сформирована вторая оценка уклона грунта. Устройство также содержит средство для формирования оценки уклона, взвешенной указанными значениями параметра, где устройство также включает в себя средство для определения соответствующего влияния указанных значений параметра на указанную взвешенную оценку уклона, при этом указанное взвешивание приспособлено для управления изменениями достоверности значений параметра. Взвешенное оценивание можно осуществлять, используя статистический фильтр, такой как фильтр Калмана или расширенный фильтр Калмана. Указанные значения параметра могут быть составлены из данных от по меньшей мере двух из группы, в которую входят: спутниковая система позиционирования, датчик давления, механический датчик уклона, акселерометр, модель динамики транспортного средства по направлению движения, информация об уклоне с карты. Это устройство обладает преимуществом, заключающимся в том, что при регулировании влияния различных значений параметра, которые используются на основании достоверности, может быть получена очень хорошая оценка уклона грунта под транспортным средством.
При условии объединения информации о горизонтальных и вертикальных кривых геометрия пути, пройденного транспортным средством, может быть описана в трехмерном измерении. Помимо описанного в недавнем прошлом пройденного расстояния также может быть воссоздана текущая картина текущей окружающей среды для движения транспорта. Примером является: «левый поворот на пересечении, до 61°, выполняемый с радиусом 12 м».
Пример последовательности сегментов состоит из: транспортное средство прошло «82 м под гору при уклоне 3%, чтобы затем после 120 м горизонтального прямого участка повернуть на 77° влево при объезде с радиусом 42 м на прямой участок длиной 30 м, за которым следует правый поворот с радиусом 300 м и дугой длиной 100 м».
Примеры различных ситуаций окружающей среды для транспортного средства, которые могут быть идентифицированы и выделены из принятых данных, показаны ниже:
- Работа на холостом ходу.
- Отбор мощности.
- Формирование колонны.
- Очередь.
- Центр города.
- Городская зона.
- Холмистая и/или извилистая дорога.
- Прямая и горизонтальная дорога.
Как представляется, в случае необходимости также можно определять ряд различных типов ситуаций окружающей среды для транспортного средства.
Чтобы иметь возможность определять на основании принятых данных, какая из указанных выше ситуаций является наиболее вероятной, при оценивании могут использоваться следующие примеры критериев:
А. Текущая скорость [км/ч].
В. Средняя скорость в последние 60 с [км/ч].
С. Средняя скорость в последние 300 с [км/ч].
D. Кривизна - какая часть дороги на последних 5 км имеет поворот больше чем 0,04 рад/с [%].
Е. Степень поворота - сумма абсолютных величин всех изменений угла, превышающих, например, 0,04 рад/с на последних 5 км [°]. [Пояснение: если ранее транспортное средство продвинулось в определенном направлении на 5 км и все еще движется в том же самом направлении, но проходит большое число кривых, то с этого времени будет иметься высокая степень поворота.]
F. Холмистость - сколько изменений уклона в последние, например, 2 мин.
G. Число остановок на последних “x” километрах, например на 2 км [число].
Н. Расстояние до предшествующей остановки [м].
I. Время, прошедшее после изменения направления транспортного средства на обратное [с].
J. Число поворотов на 180° в последние 3 мин [число].
K. Число пересечений на километр - на последних “x” километрах, например на 2 [число].
L. Число объездов на километр - на последних “x” километрах, например на 2 [число].
М. Активный отбор мощности транспортного средства.
Ниже представлен перечень примеров условий, при которых вероятность разной окружающей среды повышается. Окружающая среда, для которой наибольшая часть требований выполнена, считается наиболее вероятной окружающей средой и поэтому считается текущей окружающей средой транспортного средства. Все требования не будут выполняться, но когда большая часть требований выполняется, то становится более вероятно, что рассматриваемая окружающая среда также имеет преимущественную силу. Кроме того, в каждом определении входные данные взвешены по-разному. Например, значимость G может быть особенно большой при определении очереди. Буквы поставлены в соответствие величинам A-L, приведенным выше.
- Работа на холостом ходу
0<А<5, 2<В<5, 0<С<5.
- Отбор мощности
М=1.
- Формирование колонны
2<А<15, 2<В<15, 2<G<30, 0<I<180, 1<J<15, 3000<E<15000.
- Очередь
G>2, E<2000, 5<A<25, 5<B<25, 5<C<25.
- Центр города
10<А<60, 10<В<60, 10<С<60, 2<G<10, 2<K<100.
- Городская зона
40<А<65, 40<В<65, 40<С<65, 3<G<6, 1<K<3, 1<L<3.
- Холмистая и/или извилистая дорога
50<А<95, 50<В<95, 50<С<95, G<2, K<3, 5<D<60, 50<E<1500, 10<F<70.
- Прямая и горизонтальная дорога
65<А<120, 65<В<120, 65<С<120, G<2, H>4000, D<15, E<30, F<17, K<2.
Предпочтительно, чтобы эти вероятности обрабатывались фильтром нижних частот, так что для изменений во входных данных потребуются несколько секунд до того, как они будут оказывать влияние при новой окружающей среде.
Представленное выше решение для описания окружающей среды транспортного средства обладает большим числом преимуществ по сравнению с существующими решениями:
- Изобретение позволяет представлять пройденный путь, который описывает рейс транспортного средства, в трех измерениях и текущее положение его, и выражать этот пройденный путь в терминах, которые являются легко понятными и хорошо знакомыми для обычных людей, в качестве варианта в таких технических терминах, как величины радиусов кривизны в трех измерениях пространства.
- Не требуется информации от систем позиционирования или баз картографических данных.
- Изобретением предоставляются положения относительно окружающей среды для движения транспорта, которые имеют более высокую достоверность при описании того, что фактически является действительной геометрией, и без, например, интерпретации на основании картографических данных или согласования с последовательностью экстремальных точек в сигналах ускорения.
- Не требуется заранее определенных сведений о том, как выглядит ландшафт, о котором идет речь, а как раз наоборот, эти сведения формируются.
- Информация об окружающей среде для движения транспорта, о которой идет речь, может выдаваться в реальном времени. По незаконченному элементу можно определять, что транспортное средство находится на этом элементе.
Информация, предоставляемая настоящим изобретением о положении транспортного средства и движениях его в трех измерениях, создает множество благоприятных возможностей. Например, можно определять способность водителя вести транспортное средство в окружающей среде для движения транспорта, о которой шла речь, можно обеспечивать повышенную безопасность для водителя, пассажиров, груза и окружающей среды и можно точно отображать окружающую среду, в которой движется транспортное средство. Кроме того, изобретение может обеспечивать торговым организациям поддержку относительно приобретения навыков и обслуживания.
В параллельной патентной заявке №0601175-3 Швеции под названием “Anordnung för bestämning av förutseendeförmäga” (на английском языке “Device for determining an anticipation ability”), имеющей ту же самую дату подачи, что и настоящая заявка, описано решение для определения предполагаемого времени ожидания транспортного средства, при этом с предпочтением может быть использовано настоящее изобретение, поскольку для повышенной значимости эти характеристики должны быть поставлены в соответствие с действительной геометрией движения транспорта, что позволит выполнять более точное определение.
Кроме того, в параллельной патентной заявке №0601173-8 Швеции под названием “Anordnung för bromsslitagebedömning” (на английском языке: “Device for brake wear assessment”), имеющей ту же самую дату подачи, что и настоящая заявка, описано решение для оценивания способности водителя выбирать соответствующую тормозную систему, в котором с предпочтением может быть использовано настоящее изобретение. Эта оценка может быть выполнена значительно лучше при наличии сведений об уклоне и кривизне окружающей среды. Например, может оказаться, что определенная тормозная система должна быть основной при уклонах под гору, а другая тормозная система должна быть основной в условиях городского движения транспорта.
В параллельной патентной заявке №0601174-6 Швеции под названием “Anordnung för bestämning av ett bränsleförbrukningsbeteende” (на английском языке: “Device for determining a fuel consumption behavior”), имеющей ту же самую дату подачи, как и указанная выше заявка, описано решение, в котором настоящее изобретение с предпочтением может быть использовано вместе с устройством для оценивания способности водителя осуществлять вождение с низким расходом топлива путем анализа расхода топлива водителем в особых условиях, таких как вершина холма, долины и уклоны под гору.
Дополнительные примеры областей, в которых может быть использовано изобретение, включают в себя активирование функций усиления безопасности путем использования информации об имеющихся потенциально небезопасных ситуациях для движения транспорта, например при левом повороте на дороге скоростного движения после вершины холма. Примерами таких функций, помимо всего прочего, являются подготовка надувных подушек безопасности, снабжение водителя необходимой предупреждающей информацией (информационное воздействие).
Данные о квалифицированном вождении вместе с информацией об окружающей среде для движения транспорта, в которой движется транспортное средство, могут быть использованы станциями технического обслуживания и ремонта для установления причин возможных повреждений или поломок, а также торговыми организациями, чтобы они могли предоставлять товар, изготовленный по индивидуальному заказу, для нормальной эксплуатации покупателем. Это включает в себя выбор двигателя из вариантов, интервалов технического обслуживания и т.д.
Как представляется, транспортное средство может быть приспособлено для непрерывной передачи данных посредством, например, системы связи с подвижными объектами к внешнему контрольному средству, такому как центр контроля, в результате чего указанное выше оценивание, то есть классификация окружающей среды и определение типа или только классификация окружающей среды, может осуществляться в центре сбора и обработки данных наблюдения, а не на транспортном средстве.
Кроме того, настоящее изобретение может быть использовано для создания баз картографических данных. Например, данные о сегментах можно собирать совместно с данными об абсолютных положениях, чтобы после объединения получать базу картографических данных, имеющих очень высокую точность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ ОБ УКЛОНЕ | 2009 |
|
RU2477690C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАСХОДА ТОПЛИВА | 2007 |
|
RU2436163C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПОДДЕРЖАНИЯ ВРЕМЕН ВОЖДЕНИЯ | 2010 |
|
RU2510344C2 |
| ЦИФРОВОЙ СОВЕТЧИК ДЛЯ ВОДИТЕЛЕЙ | 2024 |
|
RU2831868C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СПОСОБНОСТИ К ПРЕДВИДЕНИЮ У ВОДИТЕЛЯ | 2007 |
|
RU2449375C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ИЗНОСА ТОРМОЗОВ | 2007 |
|
RU2433481C2 |
| СПОСОБ ОЦЕНКИ СОБСТВЕННОГО ПОЛОЖЕНИЯ И УСТРОЙСТВО ОЦЕНКИ СОБСТВЕННОГО ПОЛОЖЕНИЯ | 2016 |
|
RU2722356C1 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |


Изобретение относится к области приборостроения и может быть использовано в бортовых навигационных системах для классификации состояния окружающей обстановки. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит средство для разделения расстояния на сегменты, средство для определения начала сегмента, средство для определения опорного направления движения, средство для приема в продолжение указанного сегмента, по меньшей мере, одного значения параметра направления, который идентифицирует направление движения транспортного средства, средство для принятия решения, достигло ли транспортное средство конца сегмента, и средство для определения типа сегмента на основании заданных критериев. 3 н. и 19 з.п. ф-лы, 5 ил.
1. Устройство для определения во время движения вместе с транспортным средством типа сегмента расстояния пути, на всем протяжении которого транспортное средство движется, отличающееся тем, что устройство содержит:
- средство для разделения расстояния на сегменты,
- средство для определения того, что сегмент начался,
- средство для определения опорного направления движения,
- средство для в продолжение указанного сегмента приема, по меньшей мере, одного значения параметра направления, который образует представление направления движения транспортного средства, или с помощью которого представление направления движения транспортного средства может быть определено,
- средство для определения, достигло ли транспортное средство конца сегмента,
- средство для определения типа сегмента на основании указанных принимаемых значений параметра направления.
2. Устройство по п.1, которое дополнительно включает в себя средство для запоминания указанных значений параметра направления, принимаемых в продолжение сегмента.
3. Устройство по п.1 или 2, которое дополнительно содержит средство для запоминания типа сегмента вместе с образцом для сегмента.
4. Устройство по п.1, которое дополнительно включает в себя средство для определения типа множества последовательных или соседних сегментов, где устройство дополнительно включает в себя средство для классификации указанного расстояния на основании определенного типа указанного множества сегментов.
5. Устройство по п.1, отличающееся тем, что указанные значения параметра образуются внутренними датчиками транспортного средства.
6. Устройство по п.1, в котором указанное средство для определения того, что транспортное средство достигло конца сегмента, приспособлено для выполнения указанного определения на основании изменения в изменении направления.
7. Устройство по п.1, отличающееся тем, что указанное изменение направления является горизонтальным и/или вертикальным.
8. Устройство по п.1, в котором устройство включает в себя средство для приема значений параметров, представляющих или на основании этих значений параметра можно вычислить одно или несколько из группы: расстояние, пройденное транспортным средством в продолжение сегмента (длина дуги), радиус движения, осуществляемого транспортным средством в продолжение сегмента, мгновенная и/или средняя скорость транспортного средства в продолжение сегмента.
9. Устройство по п.1, отличающееся тем, что указанный тип сегмента состоит из любого из группы: правый поворот, левый поворот, правосторонняя кривая, левосторонняя кривая, прямой участок, объезд, вершина холма, долина, пересечение, правый поворот на пересечении, левый поворот на пересечении, горизонтальная дорога, подъем, спуск.
10. Устройство по п.1, отличающееся тем, что оно дополнительно содержит средство вывода для вывода указанного определения типа сегмента на дисплейное средство или звуковоспроизводящее средство на указанном транспортном средстве и/или на удаленное контрольное средство.
11. Устройство по п.4, отличающееся тем, что оно дополнительно содержит средство вывода для вывода указанной классификации указанного расстояния на дисплейное средство или звуковоспроизводящее средство на указанном транспортном средстве и/или на удаленное контрольное средство.
12. Устройство по п.4, отличающееся тем, что указанная классификация состоит из любого из группы: работа на холостом ходу, отбор мощности, формирование колонны, очередь, центральная часть города, город, волнистая и/или прямая, или горизонтальная, или извилистая дорога, прямая и горизонтальная или холмистая дорога.
13. Устройство по п.1, отличающееся тем, что одно или несколько из указанных средств, по меньшей мере, частично образованы компьютерной программой, при этом устройство, по меньшей мере, частично образовано компьютерным программным продуктом, представляющим собой машиночитаемый носитель и компьютерную программу, при этом компьютерная программа сохранена на машиночитаемом носителе.
14. Устройство по п.1, отличающееся тем, что указанное определение типа сегмента на основании указанных принимаемых значений параметра направления осуществляется, исходя из заданных критериев.
15. Устройство по п.13, отличающееся тем, что указанный машиночитаемый носитель образован одним или несколькими из группы, состоящей из: постоянного запоминающего устройства (ПЗУ), программируемого постоянного запоминающего устройства (ППЗУ), стираемого программируемого постоянного запоминающего устройства (СППЗУ), флэш-памяти, электрически стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ).
16. Система для определения типа окружающей среды транспортного средства для расстояния, на всем протяжении которого транспортное средство движется, отличающаяся тем, что система содержит:
- средство для разделения участка на сегменты,
- средство для каждого сегмента,
- определения того, что сегмент начался,
- определения опорного направления движения,
- в продолжение указанного сегмента приема, по меньшей мере, одного значения параметра направления, который образует представление направления движения транспортного средства, или с помощью которого представление направления движения транспортного средства может быть определено,
- определения того, что транспортное средство достигло конца сегмента,
- определения типа сегмента на основании указанных принимаемых значений параметра направления, исходя из заданных критериев, и
при этом система дополнительно включает в себя:
- средство для каждого сегмента, запоминания образца для сегмента совместно с указанным определенным типом сегмента, и
- средство для определения типа окружающей среды для указанного участка расстояния, на всем протяжении которого транспортное средство движется, на основании множества последовательных сегментов.
17. Система по п.16, отличающаяся тем, что она дополнительно содержит средство для указанного участка запоминания типа окружающей среды совместно с образцом для участка.
18. Система по п.16 или 17, отличающаяся тем, что система дополнительно включает в себя средство для определения и запоминания типа окружающей среды для множества последовательных участков.
19. Система по п.16, отличающаяся тем, что указанный тип окружающей среды состоит из любого из группы: работа на холостом ходу, отбор мощности, формирование колонны, очередь, центральная часть города, холмистая и/или извилистая дорога, прямая и горизонтальная дорога.
20. Система по п.16, отличающаяся тем, что указанные заданные критерии состоят, по меньшей мере, частично из одного или нескольких из группы: текущая скорость, средняя скорость, последние х секунд, часть последних х километров дороги, имеющей поворот больше, чем х рад/с, сумма абсолютных величин всех изменений угла, превышающих х рад/с в последние 5 км, изменение уклона за последние х секунд, число остановок в последние 5 км, расстояние относительно предшествующей остановки, время истекшее после того, как транспортное средство изменило направление на обратное, число поворотов на 180° за последние х секунд, число пересечений на единичную длину в течение заданного времени, число объездов на единичную длину, отбор мощности транспортного средства.
21. Система по п.16, отличающаяся тем, что указанное определение типа сегмента на основании указанных принимаемых значений параметра направления осуществляется, исходя из заданных критериев.
22. Транспортное средство, отличающееся тем, что оно содержит устройство и/или систему согласно любому из пп.1-21.
| Устройство для перемещения рыбыиз ОдНОгО бьЕфА гидРОузлА B дРугОй | 1979 |
|
SU817134A1 |
| US 5266948 А, 30.11.1993 | |||
| WO 2006008731 А1, 26.01.2006 | |||
| Установка для сборки и сварки продольных стыков цилиндрических изделий | 1978 |
|
SU747671A1 |
| СПОСОБ ОТОБРАЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ЭЛЕКТРОННОЙ КАРТЕ МЕСТНОСТИ В РАДИОСИСТЕМАХ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 2001 |
|
RU2207632C2 |

