Область техники, к которой относится изобретение
Настоящее изобретение относится к системе обработки информации дорожного движения, устройству статистической обработки, способу обработки информации дорожного движения и к программе обработки информации дорожного движения.
Предшествующий уровень техники
В последние годы заметен все больший прогресс в развитии интеллектуальных транспортных систем с целью поддержки плавного движения автомобилей. Например, в случае скопления при дорожном движении, возникающего в определенной зоне дороги, известная система передает данные о зоне со скоплением при дорожном движении в транспортное средство, находящееся на дороге в непосредственной близости к этой зоне, используя систему передачи данных «дорога-автомобиль» или тому подобное.
Пример такой системы описан в публикации японской заявки №JP-A-2003-288673, где система отслеживает фиксированную зону на дороге, используя оборудование детектирования транспортных средств, и определяет неподвижное состояние транспортных средств на каждой полосе движения. Если детектировано неподвижное состояние транспортных средств на полосе левого поворота в непосредственной близости к объекту, система определяет, что транспортные средства стоят на этой полосе из-за большого количества транспортных средств, ожидающих возможности выполнить левый поворот, и передает информацию о скоплении, полученную на основе транспортных средств, ожидающих возможности выполнения левого поворота, в окружающие транспортные средства.
Однако, хотя описанная выше система выполнена с возможностью определения того, что транспортные средства стоят на полосе левого поворота, система не может предоставить подробную информацию, относящемуся к фактору такого скопления. Другими словами, система не может определять, произошло ли скопление из-за того, что транспортные средства стоят, ожидая возможности парковки на месте стоянки на объекте, или возникло из-за того, что транспортные средства ожидают возможности использования так называемого обслуживания не выходя из машины.
Сущность изобретения
Настоящее изобретение было разработано с учетом описанной выше задачи, и цель настоящего изобретения состоит в том, чтобы разработать информационную систему обработки дорожного движения, устройство статистической обработки, способ обработки информации дорожного движения и программу обработки информации дорожного движения, которые позволяют генерировать подробную информацию, относящуюся к определенной зоне на дороге, вдоль объекта.
Для решения описанной выше задачи система обработки информации дорожного движения в соответствии с первым аспектом настоящего изобретения включает в себя: модуль определения условий дорожного движения, определяющий условия дорожного движения, когда транспортное средство движется в зоне дороги вдоль объекта; модуль определения поведения транспортного средства, определяющий, выполнил ли терминал для расчетов, установленный в транспортном средстве, которое движется в зоне по дороге вдоль объекта, платеж путем обмена данными с терминалом объекта, установленным на объекте; и модуль генерирования информации дорожного движения, генерирующий информацию дорожного движения, которая связывает условия дорожного движения в зоне на дороге с услугой оплаты на объекте, если определено, что оплата была выполнена, используя обмен данными.
В соответствии со вторым аспектом настоящего изобретения в системе обработки информации дорожного движения по первому аспекту модуль определения условий дорожного движения получает время детектирования скопления, когда было детектировано скопление, и время оплаты, когда была выполнена оплата путем обмена данными, и дополнительно предусмотрен модуль генерирования информации наставления, чтобы вычислять время ожидания из-за скопления, на основе времени детектирования скопления и времени оплаты, и задавать время ожидания из-за скопления.
Устройство статистической обработки в соответствии с третьим аспектом настоящего изобретения включает в себя: модуль получения информации датчиков, получающий информацию датчиков из бортового устройства; модуль определения условий дорожного движения, определяющий условия дорожного движения в зоне на дороге вдоль объекта на основе информации датчиков; модуль определения поведения транспортного средства, определяющий, произвел ли терминал оплаты, установленный на транспортном средстве, движущемся в зоне на дороге вдоль объекта, оплату путем обмена данными с терминалом объекта, установленным на объекте, и модуль генерирования информации дорожного движения, генерирующий информацию дорожного движения, которая связывает условия дорожного движения в зоне на дороге с услугой оплаты на объекте, если определено, что оплата была выполнена путем обмена данными.
В соответствии с четвертым аспектом настоящего изобретения в способе обработки информации дорожного движения, предназначенном для генерирования информации дорожного движения с использованием модуля управления, который определяет условия дорожного движения в зоне на дороге вдоль объекта, модуль управления определяет, произвел ли оплату терминал оплаты, установленный в транспортном средстве, движущемся в зоне на дороге вдоль объекта, путем обмена данными с терминалом объекта, установленным на объекте; и генерирует информацию дорожного движения, которая связывает условия дорожного движения в зоне на дороге с услугой оплаты на объекте, если определено, что оплата была выполнена путем обмена данными.
В соответствии с пятым аспектом настоящего изобретения в программе обработки информации дорожного движения для генерирования информации дорожного движения используется модуль управления, который определяет условия дорожного движения в зоне на дороге вдоль объекта, при этом модуль управления выполняет функции модуля определения поведения транспортного средства, который определяет, произвел ли оплату терминал оплаты, установленный в транспортном средстве, движущемся в зоне на дороге вдоль объекта, путем обмена данными с терминалом объекта, установленным на объекте; и модуль генерирования информации дорожного движения, генерирующий информацию дорожного движения, которая связывает условия дорожного движения в зоне на дороге с услугой оплаты на объекте, если определено, что оплата была выполнена путем обмена данными.
В соответствии с первым аспектом настоящего изобретения система обработки информации дорожного движения определяет, была ли произведена оплата путем обмена данными между терминалом оплаты и терминалом объекта. Если оплата была выполнена, тогда условия дорожного движения вдоль объекта связываются с услугой оплаты. Поэтому условия дорожного движения могут быть определены на основе транспортного средства, ожидающего использование услуги оплаты, и также может быть определен фактор условий дорожного движения, такой как скопление из автомобилей. Таким образом, становится возможным генерировать подробную информацию о дорожном движении на дороге.
В соответствии со вторым аспектом настоящего изобретения информация дорожного движения включает в себя время ожидания из-за скопления, определяемое на основе времени детектирования скопления и времени оплаты. Поэтому время ожидания из-за скопления может быть рассчитано и может быть сгенерирована информация о времени ожидания.
В соответствии с третьим аспектом настоящего изобретения устройство статистической обработки определяет, была ли произведена оплата путем обмена данными между терминалом оплаты и терминалом объекта. Если оплата была произведена, тогда условия дорожного движения вдоль объекта связываются с услугой оплаты. Поэтому условия дорожного движения могут быть определены на основе дорожного средства, ожидающего использования услуги оплаты, и также может быть определен фактор условий дорожного движения, такой как скопление из автомобилей. Таким образом, становится возможным генерировать подробную информацию о дорожном движении на дороге.
В соответствии с четвертым аспектом настоящего изобретения определяют, была ли произведена оплата путем обмена данными между терминалом оплаты и терминалом объекта. Если оплата была произведена, тогда условия дорожного движения вдоль объекта связываются с услугой оплаты. Поэтому условия дорожного движения могут быть определены на основе транспортного средства, ожидающего использования услуги оплаты, и также может быть определен фактор условий дорожного движения, такой как скопление. Таким образом, становится возможным сгенерировать подробную информацию о дорожном движении на дороге.
В соответствии с пятым аспектом настоящего изобретения в соответствии с программой обработки информации дорожного движения определяют, была ли произведена оплата путем обмена данными между терминалом оплаты и терминалом объекта. Если оплата была произведена, тогда условия дорожного движения вдоль объекта связываются с услугой оплаты. Поэтому условия дорожного движения могут быть определены на основе транспортного средства, ожидающего использования услуги оплаты, и также может быть определен фактор условий дорожного движения, такой как скопление. При этом становится возможным сгенерировать подробную информацию о дорожном движении на дороге.
Краткое описание чертежей
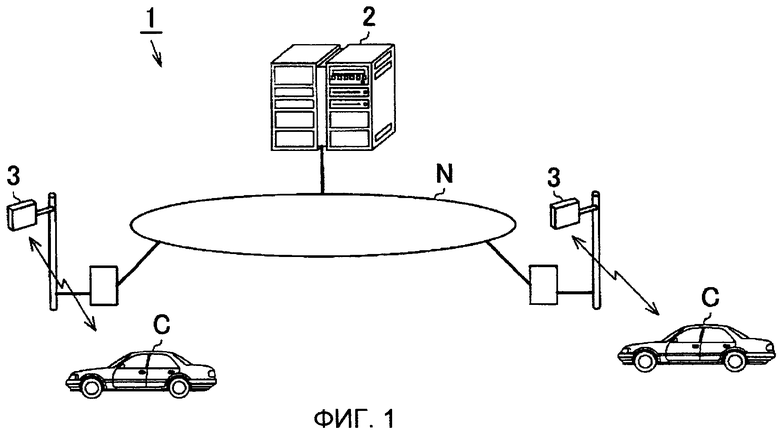
На фиг. 1 показана схема системы датчиков;
на фиг. 2 показана блок-схема, предназначенная для пояснения конфигурации аппаратных средств навигационного устройства;
на фиг. 3 показана схема системы оплаты dsrc;
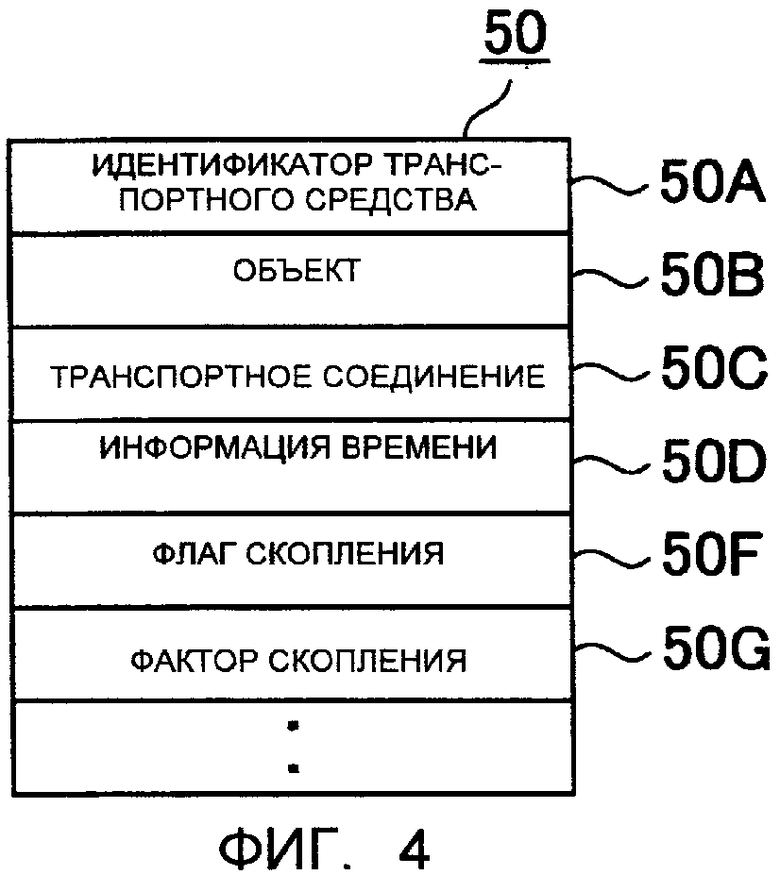
на фиг. 4 показана концептуальная схема, предназначенная для пояснения структуры данных для данных датчиков;
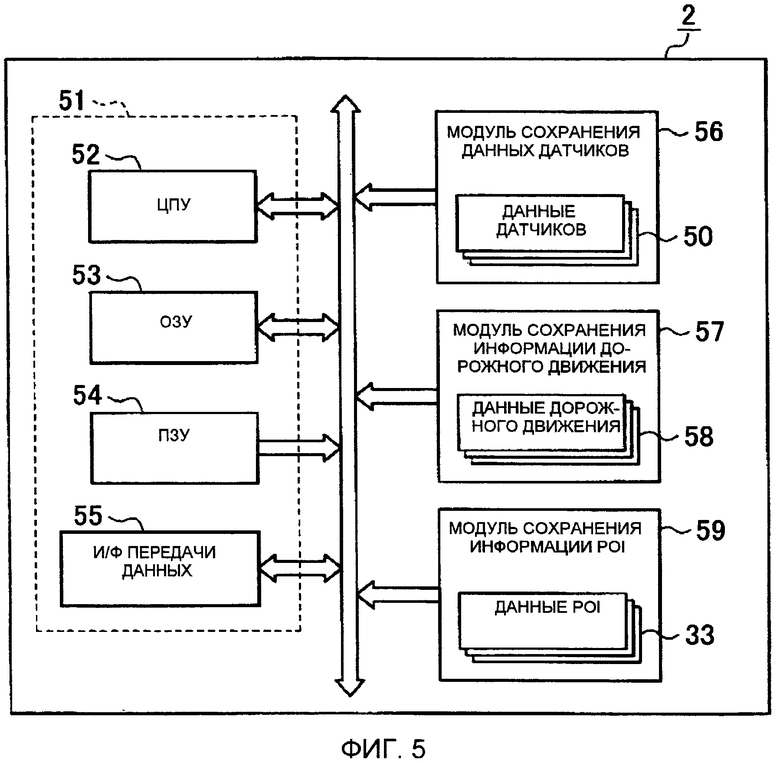
на фиг. 5 показана блок-схема, предназначенная для пояснения конфигурации аппаратных средств сервера датчиков;
на фиг. 6 показана блок-схема последовательности операций обработки по генерированию данных датчиков, в соответствии с первым вариантом выполнения;
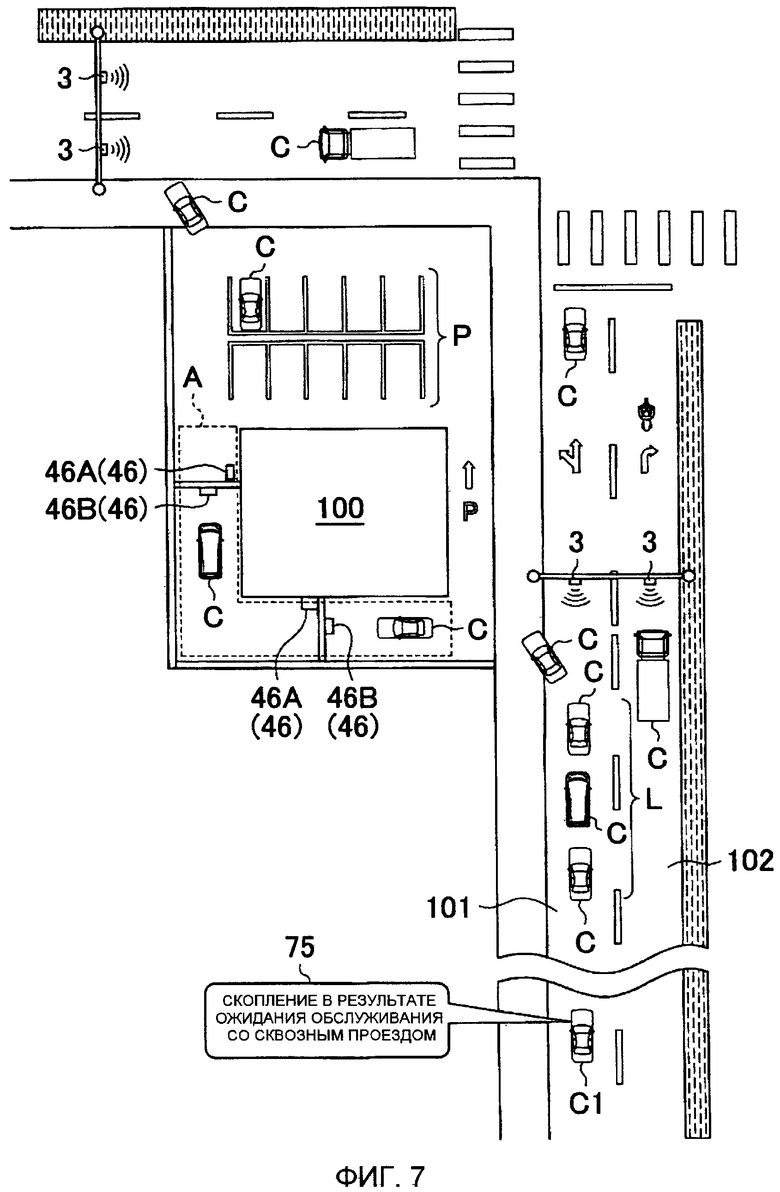
на фиг. 7 показана концептуальная схема, предназначенная для пояснения зоны дороги вокруг объекта, предоставляющего возможность получения обслуживания не выходя из машины;
на фиг. 8a показан чертеж экрана, представляющего ожидание обслуживания не выходя из машины, и на фиг. 8b показан чертеж экрана, представляющего ожидание на месте стоянки автомобилей;
на фиг. 9 показана концептуальная схема, предназначенная для пояснения структуры данных для данных датчиков, в соответствии со вторым вариантом выполнения;
на фиг. 10 показана блок-схема последовательности операций для обработки по генерированию данных датчиков, в соответствии со вторым вариантом выполнения; и
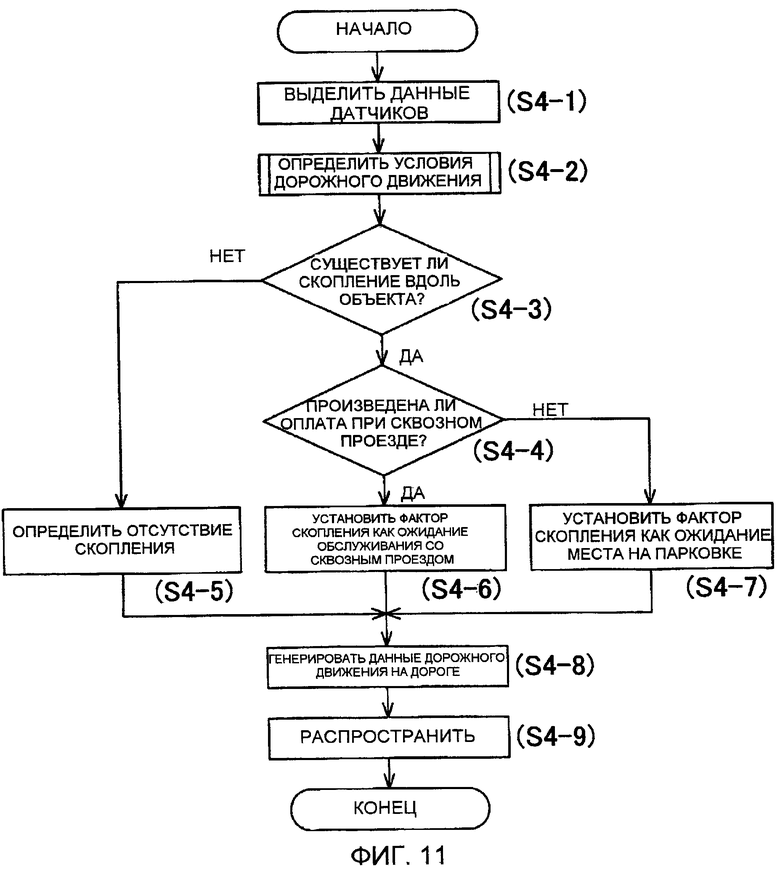
на фиг. 11 показана блок-схема последовательности операций, представляющая статистическую обработку сервера 2 датчиков.
Подробное описание изобретения
(Первый вариант выполнения)
Ниже, со ссылкой на фиг. 1-8, будет описан вариант выполнения, реализующий настоящее изобретение. На фиг. 1 показана схема системы 1 датчиков, используемая как система обработки информации дорожного движения, в соответствии с настоящим вариантом выполнения. Система 1 датчиков включает в себя сервер 2 датчиков, ретранслятор 3 и навигационное устройство 10 (см. фиг. 2), которые составляют систему обработки информации дорожного движения, установленную в транспортном средстве C. Сервер 2 датчиков и ретранслятор 3 соединены таким образом, что они могут передавать и принимать различные данные через сеть N, сформированную из сети на основе частной линии или сети общего пользования. Ретранслятор 3 установлен вдоль дороги и принимает данные датчиков из навигационного устройства 10, установленного в транспортном средстве C, используя беспроводную связь.
Навигационное устройство 10 передает данные датчиков, которые включают в себя положение собственного транспортного средства, время и информацию о перемещении, и ретранслятор 3 передает полученные данные датчиков в сервер 2 датчиков через сеть N. Сервер 2 датчиков выполняет статистическую обработку данных датчиков для генерирования данных дорожного движения, которые включают в себя информацию о скоплении, время движения или тому подобное, которые сервер 2 датчиков затем распространяет на навигационное устройство 10.
Конфигурация аппаратных средств навигационного устройства 10 поясняется далее со ссылкой на фиг. 2. В навигационном устройстве 10 предусмотрен модуль 11 управления.
Модуль 11 управления включает в себя CPU (ЦПУ, центральное процессорное устройство) 20, RAM (ОЗУ, оперативное запоминающее устройство) 21, ROM (ПЗУ, постоянное запоминающее устройство) 22, интерфейс (I/F, И/Ф) 23 на стороне транспортного средства, интерфейс (И/Ф) 24 передачи данных и модуль 25 сохранения данных идентификации. ОЗУ 21 в настоящем варианте выполнения сформировано из энергонезависимого запоминающего устройства и временно хранит различные данные, а также флаг, используемый при генерировании данных датчиков. Модуль 11 управления составляет модуль определения условий дорожного движения, модуль определения поведения транспортного средства, модуль генерирования информации дорожного движения и модуль управления. Кроме того, программа обработки информации дорожного движения сохранена в ПЗУ 22 или в модуле сохранения (не показано).
На основе сигналов детектирования, полученных через И/Ф 23 на стороне транспортного средства через приемник 40 GPS (ГСН, глобальная система навигации), датчик 41 скорости транспортного средства и гироскопический датчик 42, ЦПУ 20 идентифицирует положение собственного транспортного средства, используя радионавигацию и автономную навигацию.
Также ЦПУ 20 получает через И/Ф 23 на стороне транспортного средства данные о положении ключа зажигания, то есть включено, выключено или ACC (ВСП, вспомогательное), или тому подобное, из электронного модуля управления (ниже называется ECU (ЭМУ) 43), установленного в транспортном средстве C.
Навигационное устройство 10 выполнено с возможностью считывания различных соответствующих данных из модуля 26 сохранения географической информации и модуля 27 сохранения информации POI (о пунктах, представляющих интерес), которые формируются на основе встроенного жесткого диска или внешнего накопителя данных, такого как оптический диск. В модуле 26 сохранения географических данных содержатся данные по дорожной сети (ниже называются данными 31 маршрута) и данные 32 для вычерчивания карты.
Данные 31 маршрута включают в себя ID (ИД, идентификатор) отрезка, данные узла отрезка, тип дороги и стоимость отрезка. Узел представляет собой элемент данных, представляющий пересечение, конечную точку дороги или тому подобное; отрезок представляет собой элемент данных, который соединяет узлы.
Данные 32 вычерчивания карты содержатся в соответствии с сеткой, и с помощью таких сеток разделяют национальную карту, и данные 32 вычерчивания карты включают в себя данные фона для вычерчивания дорог, городских районов, объектов и т.п., и данные о форме дороги, определяющие форму дороги. Модуль 11 управления выполняет сопоставление карты, где данные о форме дороги и путь перемещения сопоставляются для идентификации положения собственного транспортного средства на дороге.
В модуле 27 сохранения информации POI содержатся данные 33 POI, которые представляют пункты (объекты). Данные 33 POI включают в себя код области и класс, как данные управления. Класс представляет собой, например, супермаркет, ресторан быстрого питания или тому подобное. Кроме того, данные 33 POI включают в себя название объекта, координаты и идентификатор отрезка, принадлежащий каждой области и жанру.
Кроме того, модуль 11 управления получает через И/Ф 24 передачи данных сигнал, который идентифицирует, была ли произведена оплата через бортовую LAN или беспроводную передачу данных из терминала 45 оплаты, установленного в транспортном средстве C.
Терминал 45 оплаты поясняется ниже. Терминал 45 оплаты представляет собой терминал, который производит оплату, используя DSRC (специализированную передачу данных на коротком расстоянии) при так называемом обслуживании не выходя из машины или тому подобное, которая представляет собой услугу оплаты, предоставляемую магазином, и в который может быть вставлена карта с микросхемой, такая как кредитная карта. Устройство 46 расчета для оплаты в магазине установлено в магазине, предоставляющем услугу по получению обслуживания не выходя из машины, и связывается с терминалом 45 оплаты транспортного средства C, которое въехало в заранее заданную область. На фиг. 3 показано устройство 46 расчета для оплаты в магазине, в котором предусмотрены устройство 46A управления передачей данных и модуль 46B беспроводной передачи данных, имеющий область покрытия приблизительно несколько метров.
Например, когда транспортное средство C приближается к устройству 46 расчета для оплаты в магазине, устройство 46A управления передачей данных выполняет сертификацию терминала 45 оплаты транспортного средства C через модуль 46B беспроводной передачи данных. После того как сертификация будет закончена, может быть принят заказ на продукт. В этот момент времени экран для заказа продукта может отображаться через модуль 46B беспроводной передачи данных на дисплее 35 (см. фиг. 2) навигационного устройства 10, и при этом возможно выбрать продукт, используя рабочую панель или тому подобное, установленную на стороне магазина.
После выбора продукта устройство 46A управления передачей данных рассчитывает денежную сумму за продукт и выполняет обработку по оплате для терминала 45 оплаты. В частности, устройство 46A управления передачей данных обращается к IC-карте, вставленной в терминал 45 оплаты, и считывает данные со встроенной микросхемы IC-карты. В зависимости от случая в данный момент времени устройство 46A управления передачей данных отображает сумму для оплаты или тому подобное, используя дисплей 35 (см. фиг. 2) навигационного устройства 10 или рабочую панель, установленную на стороне магазина, и подсказывает водителю ввести PIN (личный идентификационный номер) для подтверждения выполненной оплаты. После того как заранее заданная операция будет выполнена, с использованием дисплея 35 или панели операции в данном случае, устройство 46A управления передачей данных обращается к серверу оплаты (не показан) и производит расчет для оплаты.
После окончания обработки по оплате выставленной суммы на стороне транспортного средства терминал 45 оплаты передает уведомление о завершении оплаты в модуль 11 управления. После приема уведомления об окончании оплаты модуль 11 управления определяет, что транспортное средство C выполнило оплату DSRC, и использует эту информацию для определения фактора условий дорожного движения вокруг объекта.
Как отмечено выше, модуль 11 управления также генерирует данные 50 датчиков, используемые в качестве информации дорожного движения, которые модуль 11 управления затем передает в ретранслятор 3. На фиг. 4 показана концептуальная схема, предназначенная для пояснения структуры данных для данных 50 датчиков. Данные 50 датчиков представляют собой данные, генерируемые модулем 11 управления, когда детектируется скопление вдоль объекта, и данные 50 датчиков содержат идентификатор 50A транспортного средства, объект 50B, отрезок 50C пути, информацию 50D времени, флаг 50F скопления и фактор 50G скопления.
Идентификатор 50A транспортного средства представляет собой те же данные идентификации, что и идентификатор 30 транспортного средства, сохраненные в модуле 25 сохранения данных идентификации. Объект 50B представляет собой данные идентификации для объекта, в который въехало транспортное средство C, и отрезок 50C пути включает в себя идентификатор отрезка, когда модулем 11 управления детектировано скопление, и требуемое время для проезда этого отрезка. Информация 50D времени имеет, по меньшей мере, время детектирования скопления, в которое модуль 11 управления детектировал скопление, и также содержит либо время оплаты, либо время стоянки. Время оплаты представляет собой время, в которое произошел расчет для оплаты DSRC, и время стоянки представляет собой время, в которое ключ зажигания был выключен.
Флаг 50F скопления представляет собой флаг, обозначающий, имеется ли обусловленная скоплением очередь вдоль объекта, и "1" обозначает, что возникла обусловленная скоплением очередь. Когда флаг 50F скопления установлен, модуль 11 управления вначале определяет, находится ли транспортное средство C в обусловленной скоплением очереди в зоне дороги вдоль объекта. Для такой обработки можно использовать известную процедуру. Например, определяют, продолжается ли состояние, в котором скорость транспортного средства равна или меньше, чем заранее заданная скорость (например, 10 км/ч), по меньшей мере, в течение заранее заданного времени; и если это условие удовлетворяется, тогда определяют, что транспортное средство C находится в обусловленной скоплением очереди.
Если определено, что транспортное средство C находится в обусловленной скоплением очереди, тогда модуль 11 управления обращается к положению собственного транспортного средства, данным 31 маршрута или данным 32 вычерчивания карты и данным 33 POI для определения того, находится ли положение собственного транспортного средства на проезде вдоль объекта. Проезд вдоль объекта представляет собой проезд, по которому транспортное средство может попасть внутрь объекта. В это время можно определить, представляет ли собой объект, возле которого находится транспортное средство, объект, где, вероятно, происходит скопление, такой как супермаркет. Если определено, что положение собственного транспортного средства находится на указанном выше проезде, тогда модуль управления 11 определяет, что транспортное средство C находится в обусловленной скоплением очереди на въезд в объект, и устанавливает флаг 50F скопления в "1".
Фактор 50G скопления обозначает фактор скопления, детектируемого модулем 11 управления, после того как транспортное средство C въедет в объект. Для установки фактора 50G скопления модуль 11 управления определяет, было ли принято уведомление о завершении оплаты из терминала 45 оплаты. Например, модуль 11 управления определяет, было ли принято уведомление о завершении оплаты, после того как транспортное средство C въедет в объект, в то время, когда ключ зажигания находится в положении, отличающемся от "ВЫКЛЮЧЕНО" (или "БЛОКИРОВАНО"). Если определено, что уведомление о завершения оплаты не было принято, тогда модуль 11 управления устанавливает фактор 50G скопления в исходное значение "0". В качестве альтернативы, если ключ зажигания будет выключен перед приемом уведомления о завершении оплаты, тогда модуль 11 управления определяет, что транспортное средство C припарковано в зоне стоянки автомобилей, и устанавливает фактор скопления в "1", что обозначает ожидание в зоне стоянки автомобилей. В этом случае время, в течение которого ключ зажигания был выключен, временно сохраняют в ОЗУ 21. В то же время, если определено, что уведомление о завершении оплаты было принято, в то время как ключ зажигания находится в положении, отличающемся от "ВЫКЛЮЧЕНО", модуль 11 управления устанавливает фактор 50G скопления в "2", что обозначает ожидание получения обслуживания не выходя из машины.
Как показано на фиг. 2, навигационное устройство 10 также включает в себя процессор 28 изображения и аудиопроцессор 29. Процессор 28 изображения считывает данные 32 вычерчивания карты для представления экрана 71 карты на дисплее 35 и, в зависимости от данных дорожного движения, принятых из сервера 2 датчиков, также представляет отображение наставления по движению, в зависимости от приближения к зоне скопления/затора в движении и его факторов. Аудиопроцессор 29 выводит голосовые навигационные наставления, относящиеся к приближению к скоплению/затору в движении и его факторам, через громкоговоритель 36, предусмотренный в кабине транспортного средства, в соответствии с данными дорожного движения, принятыми из сервера 2 датчиков.
Конфигурация аппаратных средств сервера 2 датчиков поясняется ниже со ссылкой на фиг. 5. Сервер 2 датчиков включает в себя компьютер 51, сформированный из ЦПУ 52, ОЗУ 53, ПЗУ 54 и интерфейса (И/Ф) 55 передачи данных. Сервер 2 датчиков также включает в себя модуль 56 сохранения данных датчиков, модуль 57 сохранения информации дорожного движения и модуль 59 сохранения информации POI. В состав компьютера 51 входит модуль генерирования информации навигационных наставлений и модуль получения информации датчиков. Кроме того, программа статистики сохранена в ПЗУ 22 или в модуле накопителя (не показан).
Данные 50 датчиков, принимаемые из навигационного устройства 10, временно содержатся в модуле 56 сохранения данных датчиков. В модуле 57 сохранения информации о дороге содержатся данные 58 о дорожном движении. В модуле 59 сохранения информации POI содержатся данные 33 POI, относящиеся к пунктам (объектам).
Компьютер 51 выполняет статистическую обработку, используя данные 50 датчиков, временно сохраненные в модуле 56 сохранения данных датчиков, и генерирует данные 58 дорожного движения на дороге. Например, компьютер 51 выполняет статистическую обработку множества данных 50 датчиков, имеющих один и тот же объект 50B, среди накопленных данных 50 датчиков, для определения того, имеется ли скопление вдоль объекта.
Если определено, что имеется скопление вдоль объекта, тогда компьютер 51 выделяет фактор 50G скопления. Если фактор 50G скопления установлен как "0", тогда фактор скопления неизвестен. Поэтому компьютер 51 генерирует данные 58 дорожного движения, задавая только зону скопления, и передает данные 58 дорожного движения в окружающие транспортные средства C.
Если фактор 50G скопления равен "1", то есть, если данные 50 датчиков, обозначающие ожидание в зоне стоянки автомобилей, будут накоплены, тогда компьютер 51 считывает информацию 50D времени, относящуюся к данным 50 датчиков, для приблизительного расчета времени, в течение которого транспортное средство C находилось в очереди из-за скопления. Например, когда время детектирования скопления, включенное в информацию 50D времени, определено как "11:00" и время стоянки, аналогично включенное в информацию 50D времени, представляет собой "11:15", тогда оценивают, что это время, в течение которого транспортное средство C находилось в очереди из-за скопления, составляет приблизительно 15 минут. Компьютер 51 затем генерирует данные 58 дорожного движения, которые обеспечивают формирование навигационных наставлений в соответствии с фактором скопления, который представляет время стоянки автомобилей, и оценка времени ожидания составляет 15 минут. Такие данные 58 дорожного движения в последующем распространяются через ретранслятор 3 на транспортные средства C вокруг пункта, в котором возникла обусловленная скоплением очередь.
Тем временем, если фактор 50G скопления равен "2", то есть, по мере того, как данные 50 датчиков, обозначающие ожидание получения обслуживания не выходя из машины, накапливаются, тогда определяют, что очередь из-за скопления вдоль объекта представляет собой скопление в ожидании получения обслуживания не выходя из машины. Компьютер 51 затем считывает информацию 50D времени данных 50 датчиков для приблизительного расчета времени, в течение которого транспортное средство C пребывает в очереди из-за скопления. Например, когда время детектирования скопления, включенное в информацию 50D времени, представляет собой "11:00", и время оплаты, аналогично включенное в информацию времени 50D, определено как "11:10", тогда получают оценку, что время, в течение которого транспортное средство C находилось в очереди из-за скопления, составляет приблизительно 10 минут. Компьютер 51 затем генерирует данные 58 дорожного движения, которые предоставляют навигационные наставления с учетом фактора скопления, который представляет собой время ожидания получения обслуживания не выходя из машины, и оценка времени ожидания составляет 10 минут. Такие данные 58 дорожного движения в последующем распространяются на транспортные средства C вокруг пункта, где возникла обусловленная скоплением очередь.
Процедура обработки в соответствии с настоящим вариантом выполнения поясняется со ссылкой на фиг. 6. На фиг. 6 показана блок-схема последовательности операций, представляющая обработку по генерированию данных датчиков, выполняемую устройством 10.
На фиг. 6 показан модуль 11 управления навигационного устройства 10, который определяет, с помощью описанной выше процедуры, возникло ли скопление вдоль объекта (этап S1-1). Например, как показано на фиг. 7, если транспортное средство C перемещалось со скоростью, равной или меньшей, чем заранее заданная скорость в течение, по меньшей мере, заранее заданного времени по проезду 101 для въезда в магазин 100, который представляет собой объект, такой как супермаркет или ресторан быстрого питания, тогда определяют, что обусловленная скоплением очередь L вдоль объекта существует на этом проезде (ДА на этапе S1-1). Флаг 50F скопления, установленный в "1", временно сохраняют в ОЗУ 21 или тому подобное, и процедура обработки переходит на этап S1-2. Время в этот момент также временно сохраняют в ОЗУ 21 или тому подобное как время детектирования скопления.
В то же время, если модуль 11 управления определяет, что транспортное средство C не перемещалось, по меньшей мере, в течение заранее заданного времени со скоростью, равной или меньшей, чем заранее заданная скорость, или определяет, что транспортное средство C перемещалось по проезду 102 с правым поворотом, или определяет, что отсутствует какой-либо объект вокруг положения собственного транспортного средства, тогда определяют, что обусловленная скоплением очередь вдоль объекта не существует (НЕТ на этапе S1-1). Модуль 11 управления затем устанавливает флаг 50F скопления в "0" и повторяет обработку на этапе S1-1.
На этапе S1-2 флаг 50F скопления устанавливают в "1", и модуль 11 управления определяет, въехало ли транспортное средство C на объект, на основе положения собственного транспортного средства и т.п. Если определено, что транспортное средство C не въехало на объект (НЕТ на этапе S1-2), тогда процедура обработки возвращается на этап S1-1 и описанное выше определение повторяют. Если определено, что транспортное средство C въехало на объект (ДА на этапе S1-2), тогда процедура обработки переходит на этап S1-3.
На этапе S1-3 определяют, была ли произведена оплата DSRC. Как описано выше, модуль 11 управления определяет, было ли принято уведомление о завершении оплаты из терминала 45 оплаты. Если на этапе S1-3 определено, что оплата не была произведена (НЕТ на этапе S1-3), тогда процедура обработки переходит на этап S1-4.
На этапе S1-4, если не поступает уведомление о завершении оплаты, определяют, был ли выключен ключ зажигания, с помощью ЭМУ 43. Например, после того как транспортное средство C въезжает в обусловленную скоплением очередь L вдоль объекта и паркуется в зоне P стоянки автомобилей, ключ зажигания выключают без выполнения какой-либо обработки оплаты, используя передачу данных DSRC. В таком случае определяют, что ключ зажигания был выключен, без приема уведомления о завершении оплаты (ДА на этапе S1-4), и процедура обработки переходит на этап S1-6. На этапе S1-6 модуль 11 управления устанавливает фактор 50G скопления как время ожидания в зоне стоянки автомобилей и временно сохраняет фактор 50G скопления в ОЗУ 21 или тому подобное.
В качестве альтернативы, в случае, если не будет принято уведомление о завершении оплаты, на этапе S1-4 определяют, что ключ зажигания находится в положении, отличающемся от "ВЫКЛЮЧЕНО" (НЕТ на этапе S1-4), тогда модуль 11 управления устанавливает фактор 50G скопления в исходное значение "0" (этап S1-7). После установки фактора 50G скопления в исходное значение модуль 11 управления определяет, покинуло ли транспортное средство C объект (этап S1-8). Если после въезда на объект транспортное средство C выезжает без выполнения оплаты или без стоянки автомобиля (ДА на этапе S1-8), тогда данные 50G датчиков генерируют с фактором 50G скопления, установленным в исходное значение "0" (этап S1-9). Сгенерированные данные 50 датчиков временно сохраняют в ОЗУ 21. Если определено, что транспортное средство C не выехало из объекта (НЕТ на этапе S1-8), тогда процедура возвращается на этап S1-3, и определяют, была ли выполнена оплата.
В то же время, после того как модуль 11 управления получит уведомление о завершении оплаты, на этапе S1-3 определяют, что оплата была произведена (ДА на этапе S1-3), и модуль 11 управления устанавливает фактор 50G скопления в ожидание получения обслуживания на выходе из машины (этап S1-5). Время в этот момент также временно сохраняют в ОЗУ 21 или тому подобное как время оплаты.
Например, как показано на фиг. 7, в случае области A оплаты вокруг магазина, где терминал оплаты 45 и модуль 46B беспроводной передачи данных могут связываться друг с другом, флаг 50F скопления транспортного средства C перед въездом в область A оплаты устанавливают в "1" и фактор 50G скопления устанавливают в "0". Если терминал 45 оплаты и модуль 46B беспроводной передачи данных связываются друг с другом и терминал 45 оплаты генерирует уведомление о завершении оплаты, тогда флаг 50F скопления транспортного средства C устанавливает "1", а фактор 50G скопления устанавливают в "2".
После того, как фактор 50G скопления будет установлен на получение обслуживания не выходя из машины или в исходное значение, как пояснялось на этапах S1-5 - S1-7, модуль 11 управления генерирует данные 50 датчиков, используя время детектирования скопления, флаг 50F скопления и фактор 50G скопления, сохраненные в ОЗУ 21 или тому подобное, а также, по мере того как транспортное средство въезжает на объект, идентификатор 30 транспортного средства и время оплаты или время стоянки (этап S1-9). Сгенерированные данные 50 датчиков временно сохраняют в ОЗУ 21.
После генерирования данных 50 датчиков модуль 11 управления передает данные 50 датчиков через И/Ф 24 передачи данных в заранее заданные моменты времени. Моменты времени, в которые передают данные 50 датчиков, не ограничены чем-либо конкретным. Например, данные 50 датчиков могут быть переданы, когда запрос на данные принимают из ретранслятора 3, или данные 50 датчиков могут быть переданы в ретранслятор 3, находящийся в непосредственной близости, в заранее заданный интервал времени. Следует отметить, что в настоящем варианте выполнения описанные выше определения повторяют до тех пор, пока данные 50 датчиков не будут сгенерированы, и данные 50 датчиков передают после генерирования данных 50 датчиков.
После передачи данных 50 датчиков модуль 11 управления инициализирует флаг 50F скопления, фактор 50G скопления, время детектирования скопления, время оплаты и т.п.
После того как сервер 2 датчиков примет данные 50 датчиков, сервер 2 датчиков временно сохраняет данные 50 датчиков в модуле 56 сохранения данных датчиков и генерирует данные 58 дорожного движения, как описано выше. В это время компьютер 51 выполняет статистическую обработку совокупности данных 50 датчиков, имеющих один и тот же объект 50B, для определения того, произошло ли скопление в отношении конкретного объекта.
Если произошло скопление вдоль объекта, тогда факторы 50G скопления соответствующих данных 50 датчиков извлекают и выполняют статистическую обработку для идентификации фактора 50G скопления. Также, соответствующие данные, включенные в информацию 50D времени, усредняют для приблизительного расчета времени ожидания, для использования времени обслуживания не выходя из машины или времени ожидания стоянки автомобилей в зоне P для парковки. Фактор 50G скопления, информация, относящаяся к времени ожидания, название объекта, где происходит скопление, и т.п. включены в данные 58 дорожного движения, и такие данные 58 дорожного движения передают через ретранслятор 3 в транспортное средство C, стоящее в обусловленной скоплением очереди L, и в следующее транспортное средство C1 и т.п. на проезде 101, где возникла обусловленная скоплением L очередь.
После того как навигационное устройство 10 из следующего транспортного средства C1 примет данные 58 дорожного движения, навигационное устройство 10 использует процессор 28 изображения для представления отображения 70 навигационного наставления, такого как показано на фиг. 8, на дисплее 35. На фиг. 8A показан чертеж экрана, где фактор 50G скопления установлен в режим ожидания обслуживания не выходя из машины, и на фиг. 8B показан чертеж экрана, когда фактор 50G скопления установлен в ожидание в зоне стоянки автомобилей. Как показано на фиг. 8A и 8B, отображение 70 направления может быть частично наложено поверх экрана 71 карты или может отображаться поверх всей области вычерчивания карты. Поскольку фактор скопления и время ожидания из-за скопления показаны на дисплее 70 направления, водитель следующего транспортного средства C1 в полосе 101 может заранее плавно перестроиться в полосу 102 с правой стороны для избежания скопления. Кроме того, водитель транспортного средства C в обусловленной скоплением очереди L может подтвердить фактор позади обусловленной скоплением очереди L и проверить время ожидания. Поэтому становится возможным предотвратить возникновение стресса у водителя во время ожидания из-за скопления.
В соответствии с первым вариантом выполнения могут быть получены следующие эффекты.
(1) В первом варианте выполнения навигационное устройство 10 определяет условия дорожного движения, когда транспортное средство C передвигается в зоне дороги вдоль объекта, и определяет, была ли произведена оплата путем обмена данными, между терминалом 45 оплаты в собственном транспортном средстве и устройством 46 расчета для оплаты в магазине, установленным на объекте. В случаях, когда определено, что оплата была произведена, генерируют данные 50 датчиков, связывающие условия дорожного движения в зоне дороги с услугой оплаты на объекте. В соответствии с этим сервер 2 датчиков может определять условия дорожного движения на основе транспортного средства, ожидающего использования услуги ожидания, и определять фактор условий дорожного движения, таких как скопление, в результате чего данные 58 дорожного движения могут быть сгенерированы для предоставления навигационных наставлений, относящегося к условиям дорожного движения. При этом становится возможным генерировать подробные данные 58 дорожного движения.
(2) В соответствии с первым вариантом выполнения модуль 11 управления получает время детектирования скопления при детектировании скопления и время оплаты при выполнении оплаты или время стоянки, которые отправляются в сервер 2 датчиков как информация 50D времени. Когда присутствует скопление в зоне дороги вдоль объекта, сервер 2 датчиков рассчитывает время ожидания из-за скопления на основе информации времени и генерирует данные 58 дорожного движения, включающие в себя время ожидания из-за скопления. В соответствии с этим фактор скопления и время ожидания из-за скопления могут быть показаны на дисплее 35 транспортного средства C, на которое были распространены данные 58 дорожного движения. Водитель, таким образом, может быть уведомлен о времени ожидания из-за скопления, что делает возможным удерживать водителя в состоянии, в котором у него не возникает стресс.
(Второй вариант выполнения)
Второй вариант выполнения, реализующий настоящее изобретение, будет описан ниже со ссылкой на фиг. 9-11. Следует отметить, что второй вариант выполнения имеет конфигурацию, идентичную конфигурации первого варианта выполнения, за исключением модификации процедуры обработки. Подробное описание подобных участков, таким образом, здесь не приведено.
На фиг. 9 показана схема данных 50 датчиков, передаваемых навигационным устройством 10, используемым в качестве встроенного устройства, в соответствии с настоящим вариантом выполнения. Аналогично первому варианту выполнения эти данные 50 датчиков имеют идентификатор 50A транспортного средства и отрезок 50C пути. В настоящем варианте выполнения данные датчиков 50 также имеют положение 50P, время 50T, скорость 50I, флаг 50J торможения и флаг 50K оплаты. Также следует отметить, что транспортное соединение 50C может быть исключено.
Положение 50P обозначает положение транспортного средства во время генерирования или передачи данных 50G датчиков. Время 50T обозначает время, когда данные 50G датчиков были сгенерированы или отправлены. Скорость 50I представляет собой скорость транспортного средства, рассчитанную на основе импульса скорости транспортного средства, когда данные 50G датчиков были сгенерированы или переданы. Флаг 50J торможения представляет собой флаг, обозначающий, была ли нажата педаль тормоза, и устанавливаемый на основе сигнала включено или выключено, получаемого из ЭМУ 43.
Флаг 50K оплаты представляет собой флаг, обозначающий, принял ли модуль 11 управления уведомление о завершении оплаты. Когда модуль 11 управления принимает уведомление о завершении оплаты, в то время как ключ зажигания находится в положении, отличающемся от "ВЫКЛЮЧЕНО", значение флага 50K оплаты, сохраненное в ОЗУ 21 или тому подобное, устанавливают в положение "ВКЛЮЧЕНО" (например, в "1"). Когда ключ зажигания выключен, флаг 50K оплаты инициализируют и устанавливают в положение "ВЫКЛЮЧЕНО" (например, в "0").
На фиг. 10 показана блок-схема последовательности операций, представляющая обработку по генерированию данных датчиков навигационного устройства 10. Используя тот же способ, как и в приведенном выше варианте выполнения, модуль 11 управления определяет, была ли произведена оплата DSRC при обслуживании не выходя из машины (этап S3-1).
Если модуль 11 управления принимает уведомление о завершении оплаты и определяет, что оплата DSRC была выполнена (ДА на этапе S3-1), тогда модуль 11 управления устанавливает флаг 50K оплаты в положение "ВКЛЮЧЕНО" (этап S3-2).
Однако, если модуль 11 управления определяет на этапе S3-1, что оплата DSRC не была проведена при обслуживании не выходя из машины (НЕТ на этапе S3-1), тогда модуль 11 управления устанавливает флаг 50K оплаты в положение "ВЫКЛЮЧЕНО" (этап S3-3).
Модуль 11 управления затем генерирует данные 50 датчиков с описанной выше структурой и передает данные 50 датчиков в ретранслятор 3 в заранее заданные моменты времени (этап S3-4). Другими словами, модуль 11 управления выполняет передачу данных, передавая только информацию о перемещении транспортного средства C, а также о том, была ли произведена оплата, не детектируя при этом скопление или фактор скопления.
Когда сервер 2 датчиков принимает данные 50 датчиков через ретранслятор 3, сервер 2 датчиков накапливает данные 50 датчиков в модуле 56 сохранения данных датчиков.
На фиг. 11 показана блок-схема последовательности операций, представляющая статистическую обработку, выполняемую сервером 2 датчиков. В настоящем варианте выполнения компьютер 51 содержит модуль определения условий дорожного движения, модуль определения поведения транспортного средства, модуль генерирования информации дорожного движения и модуль управления. Кроме того, программа обработки информации дорожного движения сохранена в компьютере 51.
Компьютер 51 извлекает из модуля 56 сохранения данных датчиков данные 50 датчиков, переданные из той же полосы (этап S4-1), и использует извлеченные данные 50 датчиков для определения условий дорожного движения в конкретной области с помощью известного способа (этап S4-2). Например, компьютер 51 выполняет поиск совокупности данных 50 датчиков, переданных в разное время, но которые имеют одинаковый идентификатор 50A транспортного средства, и определяет, равна ли скорость 50I или меньше, чем заранее заданная скорость. На основе времени 50T данных 50 соответствующих датчиков также определяют, перемещалось ли транспортное средство C со скоростью, равной или меньшей, чем заранее заданная скорость, по меньшей мере, в течение заранее заданного времени. Кроме того, когда существует множество наборов таких данных, положение 50P транспортного соединения 50C используют для определения возникновения скопления. Кроме того, определяют объект, где возникает скопление, на основе данных 33 POI.
Компьютер 51 затем определяет, возникло ли скопление вдоль объекта, на основе обработки по определению на этапе S4-2 (этап S4-3). Если определено, что вдоль объекта скопление отсутствует (НЕТ на этапе S4-3), тогда компьютер 51 определяет, что скопление отсутствует в этой области (этап S4-5) и процедура обработки переходит на этап S4-8, описанный ниже.
Однако, если компьютер 51 определяет на этапе S4-3, что существует скопление вдоль объекта (ДА на этапе S4-3), тогда компьютер 51 определяет, была ли произведена оплата во время обслуживания не выходя из машины, на основе флага 50K оплаты (этап S4-4). В это время, например, может быть определено, были ли получены данные 50 датчиков с флагом 50K оплаты, установленным в "1", в течение заранее заданного времени от момента, когда транспортное средство C встало в обусловленную скоплением очередь L, детектированную на этапе S4-2.
Если определено, что оплата была произведена во время обслуживания не выходя из машины (ДА на этапе S4-4), тогда компьютер 51 устанавливает фактор скопления как ожидание обслуживания не выходя из машины (этап S4-6). Однако, если компьютер 51 определяет на этапе S4-4, что оплата не была проведена во время получения обслуживания не выходя из машины (НЕТ на этапе S4-4), тогда компьютер 51 устанавливает фактор скопления как ожидание места стоянки автомобилей (этап S4-7).
Если фактор скопления установлен или если определено, что скопление отсутствует, тогда компьютер 51 генерирует данные 58 дорожного движения как информацию дорожного движения, которая включает в себя информацию, обозначающую фактор скопления или отсутствие скопления (этап S4-8). В случаях, когда фактор скопления установлен, компьютер 51 сравнивает данные 50 датчиков, собранные, например, из того же транспортного средства, и рассчитывает время ожидания на основе времени, когда началось движение со скоростью, равной или меньшей, чем заранее заданная скорость, и на основе времени 50T данных 50 датчиков с флагом 50K оплаты, установленным в "1". Кроме того, когда рассчитывают время ожидания другого транспортного средства C, стоящего в той же обусловленной скоплением очереди L, рассчитывают среднее время ожидания или тому подобное, используя множество значений времени ожидания.
После генерирования данных 58 дорожного движения компьютер 51 распространяет сгенерированные данные 58 дорожного движения транспортного средства C в соответствующей области (этап S4-9). В соответствии со вторым вариантом выполнения могут быть получены следующие эффекты.
(3) Во втором варианте выполнения сервер 2 датчиков определяет условия дорожного движения при перемещении в зоне дороги вдоль объекта на основе данных 50 датчиков, принятых из транспортного средства C. На основе флага 50K оплаты, включенного в данные 50 датчиков, определяют, выполнило ли транспортное средство C, которое перемещается в зоне дороги вдоль объекта, платеж путем обмена данными между терминалом оплаты 45 и устройством 46 расчета для оплаты в магазине, которое установлено на объекте. В случаях, когда определено, что оплата была произведена, генерируют данные 58 дорожного движения, связывающие условия дорожного движения в зоне дороги с услугой оплаты на объекте. В соответствии с этим сервер 2 датчиков может определять условия дорожного движения на основе транспортного средства, ожидающего использование услуги оплаты, и определять фактор условий дорожного движения, такой как скопление, в результате чего данные 58 дорожного движения могут быть сгенерированы для предоставления навигационных наставлений, относящимся к условиям дорожного движения. Таким образом, становится возможным генерировать подробные данные 58 дорожного движения.
(4) В соответствии со вторым вариантом выполнения, когда существует скопление в зоне дороги вдоль объекта, сервер 2 датчиков рассчитывает время ожидания из-за скопления на основе времени 50T, включенного в данные 50 датчиков, и генерирует данные 58 дорожного движения, включающие в себя время ожидания в скоплении. В соответствии с этим фактор скопления и время ожидания в скоплении могут быть представлены на дисплее 35 транспортного средства C, в которое распространяют данные 58 дорожного движения. Водитель, таким образом, может быть уведомлен о времени ожидания из-за скопления, что позволяет помочь избежать возникновения стресса у водителя.
Следует отметить, что настоящие варианты выполнения могут быть модифицированы следующим образом.
- Данные 50 датчиков могут иметь структуру, отличающуюся от структуры данных, описанной выше. В первом варианте выполнения может быть предусмотрена структура, из которой исключен флаг 50F скопления. Во втором варианте выполнения может быть предусмотрена структура, из которой исключен флаг 50J торможения из данных 50 датчиков.
- В описанных выше вариантах выполнения модуль определения условий дорожного движения, предназначенный для определения условий дорожного движения вдоль объекта, состоит из навигационного устройства 10 или сервера 2 датчиков. Однако модуль определения условий дорожного движения может состоять из камеры наблюдения, установленной рядом с дорогой, и устройства детектирования, которое анализирует изображение из камеры наблюдения для определения условий дорожного движения. В таком случае на основе условий дорожного движения, полученных из устройства детектирования, и по информации оплаты, полученной из навигационного устройства 10, сервер 2 датчиков определяет, вызваны ли условия дорожного движения вдоль объекта въездом в зону оплаты.
- В описанных выше вариантах выполнения данные 33 POI могут включать в себя то, предоставляет ли указанный в них объект услугу по получению обслуживания не выходя из машины. Когда возникает скопление вдоль объекта, который предоставляет услугу по получению обслуживания не выходя из машины, и терминал 45 оплаты из транспортного средства, стоящего в очереди, обусловленной скоплением, выводит уведомление о завершении оплаты, фактор скопления может быть определен как время ожидания сквозного проезда.
Ниже представлено дополнительное замечание в отношении технической концепции, которую можно понять из приведенных выше вариантов выполнения и других примеров, а также их эффекта.
(a) Система обработки информации дорожного движения в соответствии с первым аспектом настоящего изобретения характеризуется тем, что, когда существует скопление в зоне дороги и терминал оплаты транспортного средства, стоящего в очереди, обусловленной скоплением, возникшим в зоне дороги, выполняет оплату путем обмена данными, модуль генерирования информации дорожного движения определяет фактор скопления как время ожидания получения обслуживания не выходя из машины и генерирует информацию дорожного движения, обеспечивающую формирование навигационных наставлений, в соответствии с фактором скопления.
Таким образом, в соответствии с аспектом настоящего изобретения, как описано в пункте (a), приведенном выше, когда транспортное средство, стоящее в очереди, обусловленной скоплением, возникшим в зоне дороги вдоль объекта, производит оплату, фактор скопления может быть определен как ожидание получения обслуживания не выходя из машины. Поэтому становится возможным поддерживать равномерное движение, также путем уведомления следующих транспортных средств в обусловленной скоплением очереди о факторе скопления.







Группа изобретений относится к технике контроля движения транспортных средств с целью его учета и регулирования. Навигационное устройство, установленное в транспортном средстве, определяет условия дорожного движения, когда транспортное средство движется в зоне дороги вдоль объекта, и определяет, произвел ли оплату терминал оплаты, установленный в транспортном средстве, путем обмена данными с терминалом объекта, установленным на объекте. Если определено, что оплата была произведена путем обмена данными, тогда генерируют данные датчиков, которые связывают условия дорожного движения в зоне дороги с услугой оплаты на объекте. Группа изобретений позволяет получать подробную информацию, относящуюся к определенной зоне на дороге, вдоль объекта. 4 н. и 1 з.п. ф-лы, 11 ил.
1. Система обработки информации дорожного движения, отличающаяся тем, что содержит:
модуль определения условий дорожного движения, определяющий условия дорожного движения, когда транспортное средство движется в зоне дороги вдоль объекта,
модуль определения поведения транспортного средства, определяющий, выполнил ли терминал оплаты, установленный на транспортном средстве, которое движется в зоне дороги вдоль объекта, оплату путем обмена данными с терминалом объекта, установленным на объекте, и
модуль генерирования информации дорожного движения, генерирующий информацию дорожного движения, которая связывает условия дорожного движения в зоне дороги с услугой оплаты на объекте, если определено, что оплата была выполнена путем обмена данными.
2. Система обработки информации дорожного движения по п.1, отличающаяся тем, что
модуль определения условий дорожного движения получает время детектирования скопления, когда скопление было детектировано, и время оплаты, когда была проведена оплата путем обмена данными, и
модуль генерирования информации наставления дополнительно предусмотрен, чтобы вычислять время ожидания в скоплении на основе времени детектирования скопления и времени оплаты и генерировать информацию наставления, которая задает время ожидания в скоплении.
3. Устройство статистической обработки, отличающееся тем, что содержит:
модуль получения информации датчиков, получающий информацию датчиков из бортового устройства,
модуль определения условий дорожного движения, определяющий условия дорожного движения в зоне дороги вдоль объекта на основе информации датчиков,
модуль определения поведения транспортного средства, определяющий, выполнил ли терминал оплаты, установленный в транспортном средстве, движущемся в зоне дороги вдоль объекта, оплату путем обмена данными с терминалом объекта, установленным на объекте, и
модуль генерирования информации дорожного движения, генерирующий информацию дорожного движения, которая связывает условия дорожного движения в зоне дороги с услугой оплаты на объекте, если определено, что оплата была произведена путем обмена данными.
4. Способ обработки информации дорожного движения, предназначенный для генерирования информации дорожного движения с использованием модуля управления, посредством которого определяют условия дорожного движения в зоне на дороге вдоль объекта, отличающийся тем, что посредством модуля управления
определяют, произвел ли оплату терминал оплаты, установленный в транспортном средстве, движущемся в зоне дороги вдоль объекта, путем обмена данными с терминалом объекта, установленным на объекте, и генерируют информацию дорожного движения, которая связывает условия дорожного движения в зоне дороги с услугой оплаты на объекте, если определено, что оплата была произведена путем обмена данными.
5. Модуль управления навигационного устройства, который определяет условия дорожного движения в зоне дороги вдоль объекта, содержащий
процессор и
запоминающее устройство, подключенное к процессору, при этом в запоминающем устройстве записана программа обработки информации дорожного движения, характеризуемая тем, что модуль управления выполняет функцию:
модуля определения поведения транспортного средства, определяющего, произвел ли оплату терминал оплаты, установленный в транспортном средстве, движущемся в зоне дороги вдоль объекта, путем обмена данными с терминалом объекта, установленным на объекте, и
модуля генерирования информации дорожного движения, генерирующего информацию дорожного движения, которая связывает информацию дорожного движения в зоне дороги с услугой оплаты на объекте, если определено, что оплата была произведена путем обмена данными.
| US 2007278300 А1, 06.12.2007 | |||
| WO 2007120833 А2, 25.10.2007 | |||
| DE 10136342 A1, 14.03.2002 | |||
| Узловязатель | 1939 |
|
SU63574A1 |

