ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка основана на патентной заявке КНР №201510268273.9 от 22 мая 2015 г. и ссылается на ее приоритет, при этом все содержание указанной заявки включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение в целом относится к транспортной технологии, в частности, к способам и устройствам для обработки информации о дорожном движении.
УРОВЕНЬ ТЕХНИКИ
[0003] Во время поездок водителю неизбежно приходится сталкиваться с плохими дорожными условиями, например, поврежденным дорожным покрытием, строительными дорожными работами, пробками и т.д. Эти факторы, влияющие на нормальное движение транспортных средств, совместно могут быть названы препятствиями. Когда транспортное средство движется с большой скоростью или в условиях плохой освещенности, то если впереди на дороге имеется препятствие, и водитель оказывается неспособен снизить скорость до необходимого уровня или отклониться от траектории движения, это может привести к износу шин или даже к дорожному происшествию. Следовательно, для безопасности водителя и транспортного средства важно заранее знать местоположение препятствий на дороге.
[0004] В настоящее время информация о местоположении препятствий обычно поступает водителю посредством дорожных радиостанций. Например, если водитель обнаруживает препятствие во время движения по дороге, он может позвонить на телефон горячей линии дорожной радиостанции и описать местоположение, тип и другие характеристики препятствия. После этого дорожная радиостанция передает информацию о препятствии другим водителям, слушающим эту дорожную радиостанцию, с целью предупреждения приближающихся к препятствию водителей о необходимости заблаговременно снизить скорость или быть более внимательными, чтобы избежать отрицательного воздействия препятствия на движение транспортного средства.
[0005] Однако при встрече с препятствием не все водители информируют других водителей о препятствии через дорожную радиостанцию, а также не все водители слушают дорожную радиостанцию. Поэтому информация о многих препятствиях не доходит до каждого водителя. С другой стороны, если водитель однажды узнал о существовании препятствия из информации дорожной радиостанции либо он лично сталкивался с препятствием, но в настоящее время это препятствие уже ликвидировано, водитель, тем не менее, будет считать, что препятствие по-прежнему существует, и поэтому выберет другой маршрут для его обхода. Это приведет к избыточному увеличению времени движения, а если водитель не знаком с альтернативным маршрутом, то могут возникнуть трудности с приездом к месту назначения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0006] Для решения проблем соответствующих технологий варианты осуществления настоящего изобретения обеспечивают способ и устройство для обработки информации о дорожном движении.
[0007] Для решения указанной выше технической проблемы вариантом осуществления настоящего изобретения предусматривается следующее техническое решение.
[0008] Согласно первому аспекту вариантов осуществления настоящего изобретения, обеспечивается способ обработки информации о дорожном движении, применяемый в терминале и включающий:
[0009] сбор информации о текущем местоположении движущегося транспортного средства;
[0010] определение, совпадает ли текущее местоположение с заданным местоположением препятствия;
[0011] отслеживание величины изменения заданного параметра блокирования в текущем местоположении транспортного средства и определение, выходит ли величина изменения заданного параметра блокирования за пределы соответствующего заданного диапазона, если текущее местоположение не является заданным местоположением препятствия; и
[0012] передача на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
[0013] С учетом первого аспекта, в первой возможной реализации первого аспекта способ дополнительно содержит следующие действия:
[0014] определение момента времени, когда транспортное средство находится в текущем местоположении, как момента времени препятствия, если текущее местоположение не совпадает с заданным местоположением препятствия, но величина изменения заданного параметра блокирования выходит за пределы заданного диапазона;
[0015] получение информации о препятствии в момент времени препятствия, при этом информация о препятствии содержит, по меньшей мере, одно изображение, полученное в течение первого заданного временного интервала до момента времени препятствия, и одно изображение, полученное в течение второго заданного временного интервала после момента времени препятствия; и
[0016] передача информации о препятствии на заданный сервер.
[0017] С учетом первого аспекта, во второй возможной реализации первого аспекта способ дополнительно содержит следующие действия:
[0018] определение величины изменения заданного параметра блокирования в текущем местоположении транспортного средства и определение, находится ли величина изменения заданного параметра блокирования в пределах соответствующего заданного диапазона, если текущее местоположение является заданным местоположением препятствия; и
[0019] передача на заданный сервер информации о величине изменения заданного параметра блокирования и о текущем местоположении, когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона.
[0020] С учетом первого аспекта, или первой возможной реализации первого аспекта, или второй возможной реализации первого аспекта, в третьей возможной реализации первого аспекта способ дополнительно содержит следующие действия:
[0021] получение информации о маршруте движения транспортного средства и передача информации о маршруте движения транспортного средства на заданный сервер;
[0022] прием от заданного сервера заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения; и
[0023] локальное представление на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
[0024] С учетом третьей возможной реализации первого аспекта, в четвертой возможной реализации первого аспекта способ дополнительно содержит следующие действия:
[0025] получение информации о маршруте движения транспортного средства;
[0026] обозначение на маршруте движения всех заданных местоположений препятствий по маршруту движения; и
[0027] локальное представление на транспортном средстве маршрута движения с обозначенными заданными местоположениями препятствий.
[0028] С учетом четвертой возможной реализации первого аспекта, в пятой возможной реализации первого аспекта способ дополнительно содержит следующие действия:
[0029] прием от пользователя запроса местоположений заданных препятствий по маршруту движения;
[0030] передача запроса на заданный сервер.
[0031] прием информации о препятствиях для заданных местоположений препятствий, найденной заданным сервером в соответствии с запросом; и
[0032] представление информации о препятствиях для заданных местоположений препятствий.
[0033] С учетом второго аспекта вариантов осуществления настоящего изобретения предлагается способ обработки информации о дорожном движении, применяемый на сервере, содержащий следующие действия:
[0034] прием информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
[0035] определение, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере; и
[0036] определение текущего местоположения как местоположения препятствия, локальное сохранение на сервере величины изменения заданного параметра блокирования и сохранение текущего местоположения в списке заданных местоположений препятствий, если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий.
[0037] С учетом второго аспекта, в первой возможной реализации второго аспекта способ дополнительно содержит следующие действия:
[0038] прием информации о маршруте движения, передаваемой вторым заданным транспортным средством;
[0039] определения факта наличия заданного местоположения препятствия по маршруту движения; и
[0040] передача на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения, если заданное местоположение препятствия существует по маршруту движения.
[0041] С учетом второго аспекта, во второй возможной реализации второго аспекта способ дополнительно содержит следующие действия:
[0042] определение заданного местоположения препятствия из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия, если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий.
[0043] С учетом второго аспекта, в третьей возможной реализации второго аспекта способ дополнительно содержит следующие действия:
[0044] при определении текущего местоположения как местоположения препятствия, прием информации о препятствии для местоположения препятствия от первого заданного транспортного средства, при этом информация о препятствии содержит, по меньшей мере, изображения местоположения препятствия; и
[0045] локальное сохранение информации о препятствии на заданном сервере.
[0046] С учетом третьей возможной реализации первого аспекта, в четвертой возможной реализации второго аспекта способ дополнительно содержит следующие действия:
[0047] прием запроса относительно заданного местоположения препятствия от второго заданного транспортного средства;
[0048] поиск информации о препятствии, соответствующем заданному местоположению препятствия, сохраненной локально на сервере; и
[0049] передача информации о препятствии, соответствующем заданному местоположению препятствия, второму заданному транспортному средству.
[0050] С учетом первой возможной реализации второго аспекта, или четвертой возможной реализации второго аспекта, в пятой возможной реализации второго аспекта первое заданное транспортное средство и второе заданное транспортное средство являются одним и тем же транспортным средством.
[0051] С учетом третьего аспекта вариантов осуществления настоящего изобретения обеспечивается терминал для обработки информации о дорожном движении, состоящий из следующих компонентов:
[0052] получающий информацию о местоположении транспортного средства блок, сконфигурированный для получения информации о текущем местоположении транспортного средства в движении;
[0053] определяющий местоположение препятствия блок, сконфигурированный для определения, совпадает ли текущее местоположение с заданным местоположением препятствия;
[0054] отслеживающий величину изменения параметра блок, сконфигурированный для отслеживания величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение не совпадает с заданным местоположением препятствия;
[0055] первый определяющий величину изменения параметра блок, сконфигурированный для определения выхода величины изменения заданного параметра блокирования за пределы соответствующего заданного диапазона; и
[0056] первый передающий блок, сконфигурированный для передачи на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
[0057] С учетом третьего аспекта, в первой возможной реализации третьего аспекта терминал дополнительно содержит следующие компоненты:
[0058] определяющий момент времени препятствия блок, сконфигурированный для определения момента времени, когда транспортное средство находится в текущем местоположении, как момента времени препятствия, если текущее местоположение не совпадает с заданным местоположением препятствия, но величина изменения заданного параметра блокирования выходит за пределы заданного диапазона;
[0059] получающий информацию о препятствии блок, сконфигурированный для получения информации о препятствии в момент времени препятствия, при этом информация о препятствии содержит, по меньшей мере, одно изображение, полученное в течение первого заданного временного интервала до момента времени препятствия, и одно изображение, полученное в течение второго заданного временного интервала после момента времени препятствия; и
[0060] передающий информацию о препятствии блок, сконфигурированный для передачи информации о препятствии на заданный сервер.
[0061] С учетом третьего аспекта, во второй возможной реализации третьего аспекта терминал дополнительно содержит следующие компоненты:
[0062] отслеживающий величину изменения параметра блок, сконфигурированный для определения величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение совпадает с заданным местоположением препятствия;
[0063] второй определяющий величину изменения параметра блок, сконфигурированный для определения нахождения величины изменения заданного параметра блокирования в пределах соответствующего заданного диапазона; и
[0064] второй передающий блок, сконфигурированный для передачи на заданный сервер информации о величине изменения заданного параметра блокирования и о текущем местоположении, когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона.
[0065] С учетом третьего аспекта, или первой возможной реализации третьего аспекта, или второй возможной реализации третьего аспекта, в третьей возможной реализации третьего аспекта терминал дополнительно содержит следующие компоненты:
[0066] получающий информацию о маршруте движения блок, сконфигурированный для получения информации о маршруте движения транспортного средства и передачи информации о маршруте движения на заданный сервер;
[0067] принимающий информацию о местоположении препятствия блок, сконфигурированный для приема от заданного сервера заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения; и
[0068] представляющий блок, сконфигурированный для локального представления на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
[0069] С учетом третьей возможной реализации третьего аспекта, в четвертой возможной реализации третьего аспекта представляющий блок дополнительно содержит следующие компоненты:
[0070] получающий информацию о маршруте движения подблок, сконфигурированный для получения информации о маршруте движения транспортного средства;
[0071] размечающий маршрут движения подблок, сконфигурированный для обозначения на маршруте движения всех заданных местоположений препятствий по маршруту движения; и
[0072] представляющий маршрут движения подблок, сконфигурированный для локального представления на транспортном средстве маршрута движения с отмеченными заданными местоположениями препятствий.
[0073] С учетом четвертой возможной реализации третьего аспекта, в пятой возможной реализации третьего аспекта терминал дополнительно содержит следующие компоненты:
[0074] запрашивающий информацию о препятствии блок, сконфигурированный для приема от пользователя запроса местоположений заданных препятствий по маршруту движения;
[0075] передающий запрос блок, сконфигурированный для передачи запроса информации на заданный сервер;
[0076] принимающий информацию о препятствиях блок, сконфигурированный для приема информации о препятствии для заданного местоположения препятствия, найденной заданным сервером в соответствии с запросом; и
[0077] представляющий информацию о препятствиях блок, сконфигурированный для представления информации о препятствии для заданного местоположения препятствия.
[0078] С учетом четвертого аспекта вариантов осуществления настоящего изобретения обеспечивается сервер, состоящий из следующих компонентов:
[0079] принимающий блок, сконфигурированный для приема информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
[0080] определяющий местоположение препятствия блок, сконфигурированный для определения, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере;
[0081] отмечающий препятствие блок, сконфигурированный для определения текущего местоположения как местоположения препятствия, если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий; и
[0082] запоминающий блок, сконфигурированный для локального сохранения на сервере величины изменения заданного параметра блокирования и сохранения текущего местоположения в списке заданных местоположений препятствий.
[0083] С учетом четвертого аспекта, в первой реализации четвертого аспекта сервер дополнительно содержит следующие компоненты:
[0084] принимающий информацию о маршруте движения блок, сконфигурированный для приема информации о маршруте движения, передаваемой вторым заданным транспортным средством;
[0085] определяющий местоположение препятствия блок, сконфигурированный для определения наличия заданного местоположения препятствия по маршруту движения; и
[0086] передающий информацию о местоположении препятствия блок, сконфигурированный для передачи на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения, если заданное местоположение препятствия существует по маршруту движения.
[0087] С учетом четвертого аспекта, во второй реализации четвертого аспекта сервер дополнительно содержит следующие компоненты:
[0088] отмечающий местоположение без препятствия блок, сконфигурированный для определения заданного местоположения препятствия из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия, если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий.
[0089] С учетом четвертого аспекта, в третьей реализации четвертого аспекта сервер дополнительно содержит следующие компоненты:
[0090] принимающий информацию о препятствии блок, сконфигурированный для приема, при определении текущего местоположения как местоположения препятствия, информации о препятствии для местоположения препятствия от первого заданного транспортного средства, при этом информация о препятствии содержит, по меньшей мере, изображения местоположения препятствия; и
[0091] запоминающий информацию о препятствии блок, сконфигурированный для локального сохранения информации о препятствии на сервере.
[0092] С учетом третьей реализации четвертого аспекта, в четвертой реализации четвертого аспекта сервер дополнительно содержит следующие компоненты:
[0093] принимающий запросы блок, сконфигурированный для приема запроса относительно заданного местоположения препятствия от второго заданного транспортного средства;
[0094] ищущий информацию о препятствии блок, сконфигурированный для поиска информации о препятствии, соответствующем заданному местоположению препятствия, сохраненной локально на сервере; и
[0095] передающий информацию о препятствии блок, сконфигурированный для передачи информации о препятствии, соответствующем заданному местоположению препятствия, второму заданному транспортному средству.
[0096] С учетом первой реализации четвертого аспекта, или четвертой реализации четвертого аспекта, в пятой реализации четвертого аспекта первое заданное транспортное средство и второе заданное транспортное средство являются одним и тем же транспортным средством.
[0097] Технические решения согласно вариантам осуществления настоящего изобретения могут иметь следующие положительные эффекты:
[0098] В способах и устройствах, обеспечиваемых вариантами осуществления настоящего изобретения, транспортное средство определяет, совпадает ли текущее местоположение с заданным местоположением препятствия; если текущее местоположение не совпадает с заданным местоположением препятствия, отслеживается величина изменения заданного параметра блокирования транспортного средства; если величина изменения заданного параметра блокирования выходит за пределы соответствующего заданного диапазона, текущее местоположение транспортного средства определяется как местоположение препятствия, а информация о текущем местоположении транспортного средства и о величине изменения заданного параметра блокирования передается на заданный сервер; после того, как он принимает информацию о заданном местоположении препятствия, заданный сервер может передавать транспортному средству информацию о заданном местоположении препятствия, чтобы информировать транспортное средство о заданном местоположении препятствия.
[0099] В способах и устройствах, обеспечиваемых вариантами осуществления настоящего изобретения, можно обеспечить точность заданных местоположений препятствий на заданном сервере, при этом заданные местоположения препятствий могут передаваться транспортным средствам. Таким образом, водители могут в режиме реального времени получать точную информацию о находящихся на пути препятствиях и могут заблаговременно на нее реагировать, снижая скорость движения или выбирая обходной маршрут.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00100] С целью более точного описания технических решений вариантов осуществления настоящего изобретения или соответствующей области техники ниже приводится краткий комментарий к прилагаемым чертежам, которые могут использоваться в описании вариантов осуществления или соответствующей области техники. Очевидно, что специалистами в данной области могут быть созданы другие чертежи согласно приведенным чертежам без дополнительных творческих усилий.
[00101] На фиг. 1 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно примеру варианта осуществления;
[00102] на фиг. 2 приведена схема, иллюстрирующая преодоление транспортным средством препятствия;
[00103] на фиг. 3 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно другому примеру варианта осуществления;
[00104] на фиг. 4 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00105] на фиг. 5 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00106] на фиг. 6 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00107] на фиг. 7 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00108] на фиг. 8 приведена схема, иллюстрирующая карту с заданными местоположениями препятствий, нанесенными на маршрут движения;
[00109] на фиг. 9 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00110] на фиг. 10 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00111] на фиг. 11 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00112] на фиг. 12 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления;
[00113] на фиг. 13 показана блок-схема устройства для обработки информации о дорожном движении согласно примеру варианта осуществления;
[00114] на фиг. 14 показана блок-схема устройства для обработки информации о дорожном движении согласно другому примеру варианта осуществления;
[00115] на фиг. 15 показана блок-схема сервера согласно примеру варианта осуществления;
[00116] на фиг. 16 показана блок-схема терминала согласно примеру варианта осуществления; и
[00117] на фиг. 17 показана блок-схема сервера согласно примеру варианта осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[00118] С целью лучшего понимания технических решений настоящего изобретения специалистами в данной области технические решения настоящего изобретения описываются более подробно и полно со ссылками на прилагаемые чертежи. Очевидно, что описанные варианты осуществления являются только частью всех возможных вариантов осуществления настоящего изобретения. Другие варианты осуществления настоящего изобретения, основанные на вариантах осуществления настоящего описания и полученные специалистами в данной области техники без дополнительных творческих усилий, входят в объем патентной защиты настоящего изобретения.
[00119] На фиг. 1 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно примеру варианта осуществления, который применяется в терминале, установленном на транспортном средстве. Как показано на фиг. 1, в способе предусмотрено выполнение следующих шагов.
[00120] На шаге S101 осуществляется сбор информации о текущем местоположении движущегося транспортного средства.
[00121] Навигационное устройство может быть заранее установлено на транспортном средстве, и водитель может находить маршрут с помощью навигационного устройства. В случае отсутствия навигационного устройства на транспортном средстве для поиска маршрута водитель может использовать сотовый телефон, планшетный компьютер и иное подобное устройство, на котором установлена навигационная система.
[00122] Согласно варианту осуществления настоящего изобретения, бортовое навигационное устройство или терминал с установленной навигационной системой каждый именуются в дальнейшем навигационным терминалом. Как правило, навигационный терминал имеет функцию позиционирования и может в режиме реального времени получать информацию о местоположении навигационного терминала. Информацией о местоположении могут быть географические координаты широты и долготы, либо географическое название, например, название улицы или название поселения и т.д.
[00123] Информация о текущем местоположении, т.е. текущее местоположение движущегося транспортного средства может быть получена в процессе навигации. Таким образом осуществляется сбор информации о текущем местоположении транспортного средства.
[00124] На шаге S102 определяется факт совпадения текущего местоположения с заданным местоположением препятствия.
[00125] Как правило, информация о заданном местоположении препятствия может предварительно загружаться в навигационный терминал. Однако информация о заданном местоположении препятствия может также периодически обновляться.
[00126] Согласно варианту осуществления настоящего изобретения, после получения информации о заданном местоположении препятствия шаг определения, является ли текущее местоположение местоположением препятствия, может быть определением того, что текущее местоположение совпадает с заданным местоположение препятствия. Когда установлено, что текущее местоположение совпадает с заданным местоположением препятствия, определяется, что текущее местоположение является заданным местоположением препятствия, в противном случае определяется, что текущее местоположение не является заданным местоположением препятствия.
[00127] Поскольку при движении транспортного средства навигационная система может допускать ошибки, в этом случае, даже если транспортное средство фактически проезжает заданное местоположение препятствия, полученная посредством навигационной системы информация о текущем местоположении транспортного средства может не совпадать с заданным местоположением препятствия. Поэтому в другом варианте осуществления настоящего изобретения шаг определения совпадения текущего местоположения с заданным местоположением препятствия может также включать определение, находится ли текущее местоположение транспортного средства в заданном диапазоне от заданного местоположения препятствия, при этом заданным диапазоном может быть диапазон с центром в заданном местоположении препятствия и с заданным радиусом (например, один метр). Когда текущее местоположение транспортного средства находится в пределах диапазона, может быть установлено, что текущее местоположение является заданным местоположением препятствия, в противном случае может быть установлено, что текущее местоположение не является заданным местоположением препятствия.
[00128] Транспортное средство может получить информацию о заданном местоположении препятствия, передаваемую сервером. При этом сервер может передать транспортному средству все заданные местоположения препятствий в районе или городе, в котором находится транспортное средство. В качестве альтернативного варианта, когда сервер получает информацию о маршруте движения транспортного средства, сервер может передать транспортному средству заданные местоположения препятствий по маршруту движения.
[00129] Полученное на шаге S101 текущее местоположение движущегося транспортного средства сравнивается с каждым из заданных местоположений препятствий. Когда текущее местоположение транспортного средства совпадает с любым из заданных местоположений препятствий или, в качестве альтернативного варианта, когда текущее местоположение транспортного средства находится в пределах заданного диапазона любого из заданных местоположений препятствий, может быть определено, что текущее местоположение транспортного средства является заданным местоположением препятствия. В противном случае может быть определено, что текущее местоположение транспортного средства не является заданным местоположением препятствия, при этом процесс переходит в шагу S103.
[00130] Если текущее местоположение транспортного средства не является заданным местоположением препятствия, на шаге 103 отслеживается величина изменения заданного параметра блокирования, когда транспортное средство находится в текущем местоположении.
[00131] Для транспортного средства предварительно могут быть заданы некоторые параметры блокирования, например, вибрация транспортного средства, угол поворота рулевого колеса или частота вращения двигателя. Соответственно транспортное средство оборудуется соответствующими датчиками, устанавливаемыми на корпусе транспортного средства, на рулевом колесе и на двигателе.
[00132] Для сбора этих параметров на транспортном средстве предварительно может быть установлена бортовая информационная система. Бортовая информационная система подключается к этим датчиком для сбора параметров, собираемых этими датчиками, как заданных параметров блокирования, например, амплитуды вибраций транспортного средства, угла поворота транспортного средства и т.д.
[00133] Навигационный терминал подключается к бортовой информационной системе посредством кабельных или беспроводных соединений, при этом навигационный терминал может получать заданные параметры блокирования от бортовой информационной системы в режиме реального времени. В варианте осуществления настоящего изобретения, под заданным параметром блокирования понимается комбинация одного или нескольких параметров, которая указывает на встречу транспортного средства с препятствием.
[00134] Когда транспортное средство движется нормально, параметры корпуса и движущихся систем транспортного средства меняются незначительно. Когда транспортное средство встречается с препятствием, вышеуказанные параметры существенно изменяются. Таким образом, величина изменения заданного параметра блокирования может указывать на встречу транспортного средства с препятствием.
[00135] В данном варианте осуществления настоящего изобретения, в качестве примера используется величина изменения амплитуды вибраций транспортного средства.
[00136] Величиной изменения заданного параметра блокирования может быть разница между текущей амплитудой вибраций транспортного средства и амплитудой вибраций транспортного средства в заданный момент времени, например, разница между текущей амплитудой вибраций транспортного средства и амплитудой вибраций транспортного средства 1 секунду назад. Величиной изменения заданного параметра блокирования может быть также разница между текущей амплитудой вибраций транспортного средства и заданной амплитудой вибраций транспортного средства. В данном случае под заданной амплитудой вибраций транспортного средства может пониматься среднее значение амплитуды вибраций транспортного средства, движущегося по плоской дороге. Получая информацию о величине изменения заданного параметра блокирования, можно определить, испытывает ли транспортное средство существенные воздействия.
[00137] На шаге S104 определяется, выходит ли величина изменения заданного параметра блокирования за пределы соответствующего заданного диапазона.
[00138] Как описано выше на шаге S103, заданным параметром блокирования может быть комбинация одного или нескольких параметров. Поскольку каждый из любых двух различных параметров имеет различные атрибуты и типы, каждому из заданных параметров блокирования будет сопоставлен соответствующий заданный диапазон. Например, амплитуде вибраций соответствует заданный диапазон амплитуд вибраций [10, 20].
[00139] Когда величина изменения заданного параметра блокирования находится в пределах заданного диапазона, это означает, что величина изменения заданного параметра блокирования имеет допустимое значение, т.е. транспортное средство движется в обычном режиме. Когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона, это означает, что величина изменения заданного параметра блокирования имеет недопустимое значение, т.е. транспортное средство возможно преодолевает препятствие. Например, как показано на фиг. 2, когда транспортное средство встречается с относительно крупной неровностью, при этом амплитуда вибраций корпуса транспортного средства превышает заданный диапазон амплитуд вибраций.
[00140] Если среди множества заданных параметров блокирования любой из них имеет величину изменения, превышающую заданный диапазон, можно считать, что транспортное средство преодолевает препятствие. Кроме того, для устранения проблемы большой частоты ложных срабатываний за счет одного конкретного параметра могут рассматриваться комбинации из двух или нескольких параметров. Например, может рассматриваться комбинация амплитуды вибраций и скорости движения транспортного средства.
[00141] При движении транспортного средства на высокой скорости даже небольшой камень может оказать существенное воздействие на корпус транспортного средства, но когда транспортное средство передвигается на низкой скорости, камень такого же размера не оказывает воздействия на корпус транспортного средства, поэтому скорость движения и амплитуда вибраций тесно связаны. В другом варианте осуществления настоящего изобретения решение о встрече транспортного средства с препятствием принимается только в том случае, когда скорость движения превышает заданный порог, а амплитуда вибраций превышает соответствующий заданный диапазон.
[00142] Когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона, на шаге S105 информация о текущем местоположении и о величине изменения заданного параметра блокирования передается на сервер.
[00143] Поскольку текущее местоположение транспортного средства не является заданным местоположением препятствия, это означает, что сервер не рассматривает данное местоположение как заданное местоположение препятствия. Если в текущем местоположении величина изменения заданного параметра блокирования выходит за пределы соответствующего заданного диапазона, это означает, что величина изменения заданного параметра блокирования транспортного средства в текущем местоположении не входит в приемлемый диапазон величин изменения параметра при нормальном движении транспортного средства, поэтому может быть признано, что транспортное средство преодолевает препятствие.
[00144] Однако сервер не рассматривал данные местоположение как заданное местоположение препятствия и не передавал информацию о нем транспортному средству. Поэтому информация о текущем местоположении транспортного средства и о величине изменения заданного параметра блокирования в текущем местоположении транспортного средства передается на сервер, чтобы сервер обновил информацию о заданных местоположениях препятствий и зарегистрировал это местоположение как местоположение препятствия.
[00145] Когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона, процесс переходит к шагу S101.
[00146] В данном варианте осуществления настоящего изобретения, перед тем, как навигационный терминал передаст на сервер информацию о текущем местоположении транспортного средства и о величине изменения заданного параметра блокирования, навигационный терминал направляет голосовой или текстовый запрос "Сообщить о препятствии?". Водитель может выбрать на навигационном терминале ответ "да" или "нет", либо может дать голосовой ответ "да" или "нет", либо может описать препятствие, например, следующим образом: "Впереди глубокая яма размером около полуметра". Навигационный терминал может сохранить голосовое описание препятствия и получить точную информацию о препятствии в соответствии с выбором водителя или посредством распознавания голосового ответа. После подтверждения встречи транспортного средства с препятствием информация о текущем местоположении транспортного средства и о величине изменения заданного параметра блокирования передается на сервер.
[00147] Согласно настоящему варианту осуществления, если текущее местоположение транспортного средства не является заданным местоположением препятствия, отслеживается величина изменения заданного параметра блокирования транспортного средства. Если величина изменения заданного параметра блокирования выходит за пределы заданного диапазона, это означает, что в заданном местоположении препятствия существует препятствие, и что сервер не информировал терминал о том, что данное местоположение является заданным местоположением препятствия. Поэтому это означает, что сервер не рассматривает данное местоположение как заданное местоположение препятствия, следовательно, транспортное средство передает на сервер информацию о текущем местоположении и о величине изменения заданного параметра блокирования в текущем местоположении транспортного средства, чтобы сервер обновил информацию о местоположениях препятствий.
[00148] С помощью способа, описанного в настоящем варианте осуществления, информация о дорожных препятствиях может быть получена в режиме реального времени в соответствии с местоположением транспортного средства и величиной изменения заданного параметра блокирования транспортного средства, при этом информация в режиме реального времени передается на сервер, чтобы сервер мог обновить информацию о местоположении препятствий и направлять транспортным средствам более точную информацию о заданных местоположениях препятствий.
[00149] После восстановления заданного местоположения препятствия сервер не получает обновленную информацию об этом заданном местоположении препятствия. Поэтому в другом варианте осуществления настоящего изобретения, как показано на фиг. 1, способ также предусматривает выполнение следующих шагов.
[00150] Если текущее местоположение транспортного средства является заданным местоположением препятствия, на шаге S106 определяется величина изменения заданного параметра блокирования, когда транспортное средство находится в текущем местоположении.
[00151] На указанном выше шаге S102, если установлено, что текущее местоположение транспортного средства является заданным местоположением препятствия, бортовая информационная система определяет заданный параметр блокирования в текущем местоположении транспортного средства. Получение заданного параметра блокирования описано в вышеуказанном шаге S103, оно может включать получение заданного параметра блокирования транспортного средства с помощью бортовой информационной системы и последующее определение величины изменения заданного параметра блокирования.
[00152] На шаге S107 определяется, находится ли величина изменения заданного параметра блокирования в пределах соответствующего заданного диапазона.
[00153] Процесс определения того факта, находится ли величина изменения заданного параметра блокирования в пределах соответствующего заданного диапазона, описан на шаге S104. Если установлено, что величина изменения заданного параметра блокирования находится в пределах соответствующего заданного диапазона, процесс переходит к шагу S108; если установлено, что величина изменения заданного параметра блокирования выходит за пределы соответствующего заданного диапазона, процесс переходит к шагу S101.
[00154] Например, как показано на фиг. 2, если дорожное покрытие, по которому движется транспортное средство, имеет глубокую выбоину или неровность, либо транспортное средство переезжает через препятствие, на транспортное средство оказывается воздействие, вызывающее неожиданное увеличение амплитуды вибраций транспортного средства. За 1 секунду до того, как транспортное средство оказывается в текущем местоположении L, амплитуда вибраций транспортного средства имеет значение 20, а когда транспортное средство оказывается в текущем местоположении L, амплитуда вибраций имеет значение 100. Можно рассчитать, что величина изменения амплитуды вибраций транспортного средства составляет 80. Учитывая, что заданный диапазон, соответствующий величине изменения амплитуды вибраций составляет [10, 20], величина изменения амплитуды вибраций транспортного средства в текущем местоположении L выходит за пределы заданного диапазона. Процесс переходит к шагу S101 для получения информации о текущем положении движущегося транспортного средства и затем к последующим шагам.
[00155] Когда величина изменения заданного параметра блокирования находится в пределах соответствующего заданного диапазона, на шаге S108 информация о величине изменения заданного параметра блокирования и о текущем местоположении передается на сервер.
[00156] Поскольку заданное местоположение препятствия было передано сервером транспортному средству, то когда текущее положение транспортного средства совпадает с записанным на сервере заданным местоположением препятствия, текущее местоположение транспортного средства рассматривается сервером как местоположение препятствия. При этом, если полученная информация о величине изменения амплитуды вибраций транспортного средства в текущий момент находится в пределах заданного диапазона, это означает, что величина изменения амплитуды вибраций транспортного средства в текущем местоположении входит в приемлемый диапазон величины изменения параметра при нормальном движении транспортного средства. Поэтому может быть принято решение о том, что препятствие устранено, и что текущее местоположение транспортного средства не является местоположением препятствия.
[00157] В связи с этим, информация о текущем местоположении транспортного средства и о величине изменения заданного параметра блокирования в текущем местоположении транспортного средства передается на сервер, чтобы сервер обновил информацию о заданных местоположениях препятствий.
[00158] В настоящем варианте осуществления описан процесс достижения транспортным средством заданного местоположения препятствия. Транспортное средство принимает информацию о заданном местоположении препятствия от сервера; когда транспортное средство достигает заданного местоположение препятствия, отслеживается величина изменения заданного параметра блокирования транспортного средства; если величина изменения заданного параметра блокирования выходит за пределы заданного диапазона, это означает, что препятствие по-прежнему присутствует в заданном местоположении препятствия; если величина изменения заданного параметра блокирования находится в пределах заданного диапазона, это означает, что препятствие в заданном местоположении препятствия отсутствует, а сервер по-прежнему рассматривает данное местоположение как местоположение препятствия, поэтому транспортное средство передает на сервер информацию о величине изменения заданного параметра блокирования в данном местоположении, чтобы сервер мог обновить информацию о местоположениях препятствий.
[00159] Согласно описанным выше вариантам осуществления, когда транспортное средство встречает препятствие, оно только передает на сервер информацию о текущем положении транспортного средства и о величине изменения заданного параметра блокирования в текущем положении транспортного средства. Однако этой информации водителю недостаточно, чтобы получить точные сведения о препятствии и окружающей обстановке. В связи с этим, в другом варианте осуществления настоящего изобретения, показанном на фиг. 3, когда текущее местоположение транспортного средства не является заданным местоположением препятствия, и когда величина изменения заданного параметра блокирования выходит за пределы соответствующего заданного диапазона, способ также содержит следующие шаги.
[00160] На шаге S201 момент времени, когда транспортное средство находится в текущем местоположении, определяется как момент времени препятствия.
[00161] Когда текущее местоположение транспортного средства не является заданным местоположением препятствия, для сервера и всей системы это означает, что текущее положение соответствует нормальным дорожным условиям.
[00162] Если обнаруживается, что величина изменения заданного параметра блокирования выходит за пределы соответствующего заданного диапазона, это означает, что текущее местоположение не было зарегистрировано сервером как заданное местоположение препятствия.
[00163] В этом случае возникает ситуация, когда текущее местоположение должно быть зарегистрировано как заданное местоположение препятствия.
[00164] Затем, на данном шаге, момент времени, когда транспортное средство находится в текущем местоположении, определяется как момент времени препятствия. Например, транспортное средство проезжает перекресток дороги Аньдин и восточной дороги северного Тучена, район Чаоян, Пекин и встречает препятствие в 10:10:40 15 марта 2015 г. При этом фиксируется следующая информация о местоположении препятствия: перекресток дороги Аньдин и восточной дороги северного Тучена, район Чаоян, Пекин, а момент времени, когда транспортное средство встречает препятствие, фиксируется как: 10:10:40 15 марта 2015 г.
[00165] На шаге S202 фиксируется информация о препятствии в момент времени препятствия, при этом информация о препятствии содержит, по меньшей мере, одно изображение, полученное в течение первого заданного временного интервала до момента времени препятствия, и одно изображение, полученное в течение второго заданного временного интервала после момента времени препятствия.
[00166] Под изображением понимаются видеоданные, графические данные и т.д. В настоящее время многие транспортные средства оснащены тахографами и бортовыми радарами. При этом тахограф может получать видеоизображение перед транспортным средством, а бортовой радар может получать видеоизображение позади транспортного средства при движении задним ходом. Навигационный терминал может быть подключен к интерфейсу доступа тахографа для сбора видеоданных или изображений перед транспортным средством в заданный момент времени до и после того, как транспортное средство проезжает местоположение препятствия. Кроме того, навигационный терминал может быть подключен к интерфейсу доступа бортового радара для сбора видеоданных или изображений позади транспортного средства в заданный момент времени до и после того, как транспортное средство проезжает местоположение препятствия. При этом изображением может быть один или несколько кадров видеоданных.
[00167] Например, когда транспортное средство передвигается вперед и встречает препятствие, тахограф осуществляет сбор видеоданных или изображений перед транспортным средством в течение первого заданного временного интервала, например, 10 секунд, до момента времени препятствия, и видеоданных или изображений перед транспортным средством в течение второго заданного временного интервала, например, 5 секунд, после момента времени препятствия.
[00168] Когда транспортное средство передвигается задним ходом и встречает препятствие, бортовой радар осуществляет сбор видеоданных или изображений позади транспортного средства в течение первого заданного временного интервала, например, 10 секунд, до момента времени препятствия, и видеоданных или изображений позади транспортного средства в течение второго заданного временного интервала, например, 5 секунд, после момента времени препятствия.
[00169] На шаге S203 информация о препятствии передается на заданный сервер.
[00170] Согласно настоящему варианту осуществления, изображения до и после проезда транспортным средством местоположения препятствия передаются на заданный сервер, чтобы сервер мог не только зарегистрировать заданное местоположение препятствия, но также и сохранить видеоданные или изображения заданного местоположения препятствия.
[00171] Таким образом, обстановка в местоположении препятствия и на окружающей его территории может стать интуитивно понятной благодаря видеоданным с местоположения препятствия, которые хранятся на заданном сервере.
[00172] Поскольку величина изменения заданного параметра блокирования, например, амплитуды вибраций, транспортного средства тесно связано со скоростью движения транспортного средства, при движении транспортного средства с высокой скоростью небольшие неровности дорожного покрытия могут существенно повлиять на величину изменения заданного параметра блокирования транспортного средства. В связи с этим, в другом варианте осуществления настоящего изобретения, в момент времени препятствия, фиксируемого на шаге S201 в вышеописанных вариантах осуществления, может быть также зафиксирована скорость движения транспортного средства. Как показано на фиг. 4, процесс сбора данных о скорости транспортного средства может содержать следующие шаги.
[00173] На шаге S301 собирается информация о длине пути транспортного средства в течение первого заданного временного интервала до момента времени препятствия, а также о длине пути транспортного средства в течение второго заданного временного интервала после момента времени препятствия.
[00174] Например, момент времени препятствия определен как 10:10:40, первый заданный временной интервал составляет 10 секунд до момента времени препятствия. Тогда начальным моментом первого заданного временного интервала является время 10:10:30, при этом собираются данные о местоположении транспортного средства в начальный момент первого заданного временного интервала, т.е. о местоположении транспортного средства в 10:10:30. Рассчитывается линейное расстояние между местоположением транспортного средства и местоположением препятствия, принимаемое как длина пути транспортного средства в течение первого заданного временного интервала.
[00175] Аналогичным образом, фиксируется конечный момент второго заданного временного интервала после момента времени препятствия, после чего собирается информация о местоположении транспортного средства в конечный момент. Затем рассчитывается линейное расстояние между местоположением препятствия и местоположением транспортного средства, принимаемое как длина пути транспортного средства в течение второго заданного временного интервала.
[00176] На шаге S302, исходя из первого заданного временного интервала и длины пути транспортного средства в течение первого заданного временного интервала рассчитывается скорость движения транспортного средства в течение первого заданного временного интервала, а исходя из второго заданного временного интервала и пути движения транспортного средства в течение второго заданного временного интервала рассчитывается скорость движения транспортного средства в течение второго заданного временного интервала.
[00177] Информация о препятствии может определяться более точно путем получения данных о скорости движения транспортного средства до и после местоположения препятствия и объединения их с величиной изменения заданного параметра блокирования транспортного средства. Например, при движении транспортного средства с высокой скоростью даже небольшая неровность дорожного покрытия, например, "лежачий полицейский", окажет существенное воздействие на транспортное средство, при котором величина изменения амплитуды вибраций транспортного средства резко возрастает и выходит за пределы заданного диапазона, соответствующего величине изменения амплитуды вибраций транспортного средства.
[00178] При движении транспортного средства с низкой скоростью такой же "лежачий полицейский" не окажет воздействие на транспортное средство, и величина изменения амплитуды вибраций транспортного средства возрастает незначительно и, вероятно, не выйдет за пределы заданного диапазона, соответствующего величине изменения амплитуды вибраций транспортного средства. Поэтому практическая информация о препятствии будет более достоверной при сборе информации о скоростях движения транспортного средства до и после заданного момента времени препятствия.
[00179]. Согласно настоящему варианту осуществления, скорость движения транспортного средства в местоположении препятствия фиксируется для последующей оценки степени влияния препятствия на нормальное движение транспортного средства. Поэтому практическая информация о препятствии будет более достоверной при сборе комбинированной информации о скоростях движения транспортного средства до и после местоположения препятствия и о параметрах движения транспортного средства.
[00180] Поскольку иногда транспортное средство передвигается вне дорог в условиях наличия объектов, которые могут воздействовать на транспортное средство, например, перепады, то когда транспортное средство передвигается по неровной внедорожной поверхности, изменение величины изменения заданного параметра блокирования транспортного средства вероятно выйдет за пределы заданного диапазона. Если текущее местоположение транспортного средства на внедорожной поверхности передается на заданный сервер, заданный сервер регистрирует текущее местоположение как местоположение препятствия.
[00181] Однако, если местоположение препятствия находится на внедорожной поверхности, сохранение на заданном сервере местоположения препятствия на внедорожной поверхности бессмысленно с точки зрения предупреждения водителей. В связи с этим заданный сервер, как правило, не должен регистрировать местоположение препятствия на внедорожной поверхности. Согласно другому варианту осуществления настоящего изобретения, перед вышеуказанным шагом S102, т.е. до того, как будет установлено, является ли текущее местоположение заданным местоположением препятствия, как показано на фиг. 5, способ также содержит следующие шаги.
[00182] На шаге S401 определяется, находится ли текущее местоположение транспортного средства на дороге.
[00183] На заданном сервере хранится информация обо всех дорогах, включая их географические координаты широты и долготы. Географические координаты широты и долготы дорог представляют собой координатные точки, которые образуют координатные линии дорог.
[00184] Информация о текущем местоположении транспортного средства передается на заданный сервер. Заданный сервер определяет, принадлежат ли географические координаты широты и долготы текущего местоположения транспортного средства координатной линии дороги. Если географические координаты широты и долготы текущего местоположения транспортного средства принадлежат координатной линии дороги, заданный сервер передает навигационному терминалу транспортного средства сообщение о том, что местоположение препятствия находится на дороге, и навигационный терминал транспортного средства может на основании сообщения определить, что текущее местоположение транспортного средства находится на дороге. Если географические координаты широты и долготы текущего местоположения транспортного средства не принадлежат координатной линии дороги, заданный сервер передает навигационному терминалу транспортного средства сообщение о том, что местоположение препятствия находится на внедорожной поверхности, и навигационный терминал транспортного средства может на основании сообщения определить, что текущее местоположение транспортного средства находится на внедорожной поверхности.
[00185] В качестве альтернативного решения в навигационный терминал заранее загружается информация обо всех дорогах, при этом в рамках вышеописанной процедуры он может определить, находится ли текущее местоположение транспортного средства на дороге.
[00186] Если текущее местоположение транспортного средства находится на дороге, можно определить, что местоположение препятствия находится на поверхности дороги, при этом процесс переходит в шагу S102. Если текущее местоположение транспортного средства находится не на дороге, например, транспортное средство может двигаться по боковому проезду или по поверхности с перепадами, величина изменения заданного параметра блокирования транспортного средства вероятно выходит за пределы соответствующего заданного диапазона. В этом случае текущее местоположение транспортного средства не может рассматриваться как местоположение препятствия. Поэтому процесс вновь переходит к шагу S101 для получения информации о текущем положении движущегося транспортного средства.
[00187] Согласно настоящему варианту осуществления, подтверждая местоположение препятствия на дороге, можно избежать ситуации, при которой внедорожное местоположение рассматривается как местоположение препятствия на дороге вследствие его влияния на величину изменения заданного параметра блокирования, при этом повышается достоверность и точность информации о местоположении препятствия, принимаемой заданным сервером.
[00188] Согласно рассмотренным выше вариантам осуществления, транспортное средство может получать информацию о заданном местоположении препятствия от заданного сервера. Однако, поскольку в заданном сервере отсутствует информация о маршруте движения транспортного средства, сервер, вероятно, передаст транспортному средству все заданные местоположения препятствий в районе местоположения транспортного средства. В связи с этим, в другом варианте осуществления настоящего изобретения, как показано на фиг. 6, способ также предусматривает выполнение следующих шагов.
[00189] На шаге S501 собирается и передается на заданный сервер информация о маршруте движения транспортного средства.
[00190] Когда пользователь устанавливает пункт назначения движения транспортного средства с помощью навигационного терминала, навигационный терминал планирует маршрут движения транспортного средства в соответствии с текущим положением и пунктом назначения транспортного средства. Например, предположим, что текущим местоположением пользователя является Пекинский университет, а пунктом назначения - Китайский сельскохозяйственный университет, тогда навигационный терминал может планировать маршрут движения пользователя от Пекинского университета до Китайского сельскохозяйственного университета, который начинается у Пекинского университета, проходит по нескольким дорогам и заканчивается у Китайского сельскохозяйственного университета. Кроме того, маршрут движения может отображаться поверх карты на навигационном терминале.
[00191] Маршрут движения передается на заданный сервер. Маршрут движения может представлять собой географические координаты широты и долготы множества координатных точек, принадлежащих маршруту движения, при этом заданный сервер может восстановить маршрут движения на основании этих географических координат широты и долготы, либо может выполнять другие операции непосредственно с этими географическими координатами широты и долготы, например, определяя, имеется ли на данном маршруте движения заданное местоположение препятствия, сохраненное на заданном сервере.
[00192] На шаге S502 от заданного сервера принимаются заданные местоположения препятствий по маршруту движения и заданные диапазоны заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения.
[00193] После того, как заданный сервер принимает от транспортного средства маршрут движения, сервер может определить, находится ли по маршруту движения заданное местоположение препятствия, и передать на транспортное средство все заданные местоположения препятствий по маршруту движения и заданные диапазоны заданных параметров блокирования, соответствующие каждому заданному местоположению препятствия по маршруту движения, при этом величина изменения заданного параметра блокирования может сравниваться с заданным диапазоном.
[00194] На шаге S503 осуществляется локальное представление на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
[00195] Когда транспортное средство принимает информацию о заданном местоположении препятствия и о величине изменения заданного параметра блокирования, принимаемая информация может быть локально представлена на транспортном средстве в форме голосового оповещения, при этом водитель может заблаговременно реагировать на заданное местоположение препятствия в соответствии с представленной терминалом информацией. Например, при приближении к заданному местоположению препятствия водитель может снизить скорость движения или объехать препятствие.
[00196] Согласно настоящему варианту осуществления, информация о маршруте движения транспортного средства собирается и передается на заданный сервер, поэтому заданное местоположение препятствия по маршруту движения может быть получено от заданного сервера. Таким образом, заданный сервер может передавать на транспортное средство информацию о заданных местоположениях препятствий и другую необходимую информацию.
[00197] На описанном выше шаге S503, когда транспортное средство получает информацию о заданном местоположении препятствия и о величине изменения заданного параметра блокирования, информация о заданном местоположении препятствия может непосредственно отображаться на экране терминала транспортного средства. Поэтому в другом варианте осуществления настоящего изобретения, как показано на фиг. 7, способ также предусматривает выполнение следующих шагов.
[00198] На шаге S601 осуществляется сбор информации о маршруте движения транспортного средства.
[00199] в соответствии с полученным маршрутом движения транспортного средства на описанном выше шаге S502 собирается информация о маршруте движения и изображения по маршруту движения. Изображения по маршруту движения могут сохраняться в навигационном терминале заранее, либо могут загружаться с заданного сервера, и могут содержать такую информацию, как изображения дорог, входящих в маршрут движения, и окружающих строений. Кроме того, при движении транспортного средства обновляются изображения по маршруту движения, при этом водитель может видеть изображения по маршруту движения, которые всегда соответствуют текущему местоположению транспортного средства, текущей ситуации на дороге и окружающим строениям.
[00200] На шаге S602 все заданные местоположения препятствий по маршруту движения обозначаются на маршруте движения.
[00201] Как показано на фиг. 8, после получения заданного местоположения препятствия L, заданное местоположение препятствия L непосредственно наносится на маршрут движения согласно географическим координатам широты и долготы заданного местоположения препятствия L и выделяется на изображении маршрута движения с помощью графической или текстовой подсказки.
[00202] На шаге S603 осуществляется локальное представление на транспортном средстве маршрута движения с обозначенными заданными местоположениями препятствий.
[00203] Маршрут движения с обозначенными заданными местоположениями препятствий отображается на экране навигационного терминала. Кроме того, по мере приближения транспортного средства к заданному местоположению препятствия навигационный терминал выдает голосовое предупреждение. В дополнение к этому, когда транспортное средство находится достаточно близко от заданного местоположения препятствия, информация о заданном местоположении препятствия может выводиться непосредственно на экране навигационного терминала на маршруте движения, побуждая водителя заблаговременно совершать необходимые действия.
[00204] Согласно описанным выше вариантам осуществления, несмотря на то, что транспортное средство может получить информацию о заданном местоположении препятствия, на транспортном средстве отсутствует предварительная информация о фактической ситуации и окружающей обстановке в районе препятствия, поэтому водитель имеет только выбор между принятием необходимых действий или объездом, но не может найти точное решение, соответствующее ситуации в районе препятствия, что неудобно. В связи с этим, в другом варианте осуществления настоящего изобретения, как показано на фиг. 8, способ также предусматривает выполнение следующих шагов.
[00205] На шаге S701 осуществляется прием от пользователя запроса заданных местоположений препятствий по маршруту движения.
[00206] После того, как навигационный терминал транспортного средства принимают информацию о заданном местоположении препятствия, которая передается заданным сервером согласно маршруту движения транспортного средства, пользователь может определить заданное местоположение препятствия по маршруту движения как выбранное заданное местоположение препятствия и выполнить запрос информации о заданном местоположении препятствия.
[00207] Например, пользователь может выбрать заданное местоположение препятствия касанием экрана навигационного терминала. В этот момент навигационный терминал может предложить пользователю запросить дополнительную информацию о заданном местоположении препятствия. Если пользователь выбирает получение дополнительной информации, выполняется операция формирования запроса.
[00208] На шаге S702 запрос передается на заданный сервер.
[00209] Запрос, сформированный на шаге S701, передается на заданный сервер. В соответствии с запросом заданный сервер находит хранящуюся локально запись, соответствующую заданному местоположению препятствия, и запрашивает информацию о препятствии для заданного местоположения препятствия. Информация о препятствии содержит видеоданные, изображения, аудиоданные и иную подобную информацию для заданного местоположения препятствия.
[00210] Заданный сервер передает найденную информацию на навигационный терминал, выдавший запрос.
[00211] На шаге S703 осуществляется прием информации о препятствии для заданного местоположения препятствия, найденной заданным сервером в соответствии с запросом.
[00212] Согласно описанным выше вариантам осуществления, если препятствие, с которым встречается транспортное средство, не зарегистрировано на заданном сервере, это означает, что препятствие является вновь обнаруженным препятствием либо препятствием, с которым ранее не встречалось ни одно другое транспортное средство. Транспортное средство передает заданному серверу информацию о местоположении препятствия, а также видеоданные или изображения препятствия, полученные транспортным средством.
[00213] После того как другое транспортное средство выдает заданному серверу запрос информации о препятствии для заданного местоположения препятствия, транспортное средство может получить результат запроса от заданного сервера. Результатом запроса является информация о препятствии, соответствующем местоположению препятствия, которая, по меньшей мере, содержит видеоданные или изображения препятствия, а также может содержать информацию о скорости движения транспортного средства в местоположении препятствия, как показано в описанных выше вариантах осуществления, либо голосовое сообщение, предоставленное водителем на заданный сервер.
[00214] На шаге S704 осуществляется представление информации о препятствии для заданного местоположения препятствия.
[00215] После того, как транспортное средство получает информацию о препятствии для заданного местоположения препятствия, информация о препятствии для заданного местоположения препятствия может быть представлена на экране терминала. Например, воспроизводятся видеоданные или изображение препятствия, транслируется голосовое сообщение, отображается текстовое сообщение, и т.д. Информация о препятствии для заданного местоположения препятствия может быть представлена в ручном режиме пользователем или в автоматическом режиме терминалом.
[00216] В настоящем варианте осуществления, благодаря передаче на транспортное средство информации о препятствии для заданного препятствия, водитель может ясно оценить фактическую ситуацию для препятствия, с которым он встречается. Поэтому водитель может принять точное решение в отношении препятствия и может своевременно изменить маршрут движения или снизить скорость.
[00217] В описанных выше вариантах осуществления приводится способ обработки информации о дорожном движении, применяемый на транспортном средстве. Как правило, возможны две ситуации. В первой ситуации транспортное средство движется по дороге, и если оно проезжает местоположение препятствия, которое не зарегистрировано на заданном сервере, и если при этом величина изменения заданного параметра блокирования выходит за пределы заданного диапазона, информация о текущем местоположении транспортного средства, являющемся местоположением препятствия, о величине изменения заданного параметра блокирования транспортного средства в текущем местоположении и другая информация о препятствии, относящаяся к местоположению препятствия, передается на заданный сервер. Поэтому любое другое транспортное средство может узнать о местоположении препятствия и получить информацию о фактической ситуации в местоположении препятствия до того, как оно достигнет препятствия.
[00218] В другой ситуации, когда транспортное средство движется по дороге, если транспортное средство заранее получает информацию о наличии местоположения препятствия на маршруте движения, то при приближении транспортного средства к местоположению препятствия устанавливается, выходит ли величина изменения заданного параметра блокирования транспортного средства в местоположении препятствия за пределы заданного диапазона. Если она выходит за пределы заданного диапазона, это означает, что препятствие, оказывающее воздействие на транспортное средство, по-прежнему существует, и местоположение препятствия сохраняется без каких-либо дополнительных действий. Если она не выходит за пределы заданного диапазона, это означает, что препятствие не оказывает воздействие на транспортное средство, информация о местоположении препятствия и о величине изменения заданного параметра блокирования транспортного средства в текущем местоположении передается на заданный сервер, чтобы сервер мог зарегистрировать отсутствие препятствия. Когда другие транспортные средства будут проезжать данное местоположение, сервер не будет передавать информацию о том, что данное местоположение является местоположением препятствия.
[00219] В описанных выше двух ситуациях одно транспортное средство передает на заданный сервер информацию о новом препятствии, а другое транспортное средство передает на заданный сервер информацию о том, что препятствие устранено, при этом заданный сервер может хранить наиболее точную информацию о препятствии.
[00220] На фиг. 10 показана блок-схема, иллюстрирующая способ обработки информации о дорожном движении согласно еще одному примеру варианта осуществления, который применяется в заданном сервере. Как показано на фиг. 10, в способе предусмотрено выполнение следующих шагов.
[00221] На шаге S801 осуществляется прием информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством.
[00222] Как показано в описанных выше вариантах осуществления, первое заданное транспортное средство передает на заданный сервер информацию о текущем местоположении и о величине изменения заданного параметра блокирования, а заданный сервер принимает информацию, передаваемую первым заданным транспортным средством.
[00223] На шаге S802 происходит определение, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на заданном сервере.
[00224] На заданном сервере осуществляется локальное сохранение информации о местоположении препятствий и о данных движения первого заданного транспортного средства, когда оно находится в местоположениях препятствий. Этой информацией является предварительно собранная информация либо информация, предварительно собранная другими терминалами. Например, как показано в описанных выше вариантах осуществления, когда первое заданное транспортное средство проезжает местоположение препятствия, не зарегистрированное в заданном сервере, информация о новом местоположении препятствия передается на заданный сервер, чтобы он мог локально сохранить информацию о новом местоположении препятствия. При этом на заданном сервере локально хранится список заданных местоположений препятствий, содержащий информацию обо всех местоположениях препятствий, сохраненных на заданном сервере, а также пути доступа к дополнительной информации, относящейся к каждому местоположению препятствия.
[00225] Когда заданный сервер принимает от первого заданного транспортного средства информацию о текущем местоположении и о параметрах движения при прохождении первым заданным транспортным средством данного местоположения, заданный сервер сравнивает текущее местоположение первого заданного транспортного средства с каждым местоположением препятствия в списке заданных местоположений препятствий, локально хранящемся на заданном сервере, и определяет, совпадает ли текущее местоположение, переданное терминалом, с местоположением препятствия в списке заданных местоположений препятствий.
[00226] В данном случае термин "совпадает" означает, что два местоположения являются одним и тем местоположением, либо расстояние между двумя местоположениями находится в пределах заданного диапазона. Например, список заданных местоположений препятствий содержит местоположение препятствия, находящееся в юго-восточном углу пересечения дороги А и дороги Б, а местоположение препятствия, переданное первым заданным транспортным средством на заданный сервер, находится в одном метре южнее от юго-восточного угла пересечения дороги А и дороги Б; в этом случае можно предположить, что оба местоположения совпадают.
[00227] На шаге S803 если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий, текущее местоположение принимается как местоположение препятствия, величина изменения заданного параметра блокирования сохраняется локально на заданном сервере, а текущее местоположение сохраняется в списке заданных местоположений препятствий.
[00228] Когда текущее местоположение, переданное первым заданным транспортным средством, не совпадает с местоположением, сохраненным локально на заданном сервере в списке заданных местоположений препятствий, текущее местоположение, переданное первым заданным транспортным средством, помечается как местоположение препятствия и сохраняется локально в списке заданных местоположений препятствий на заданном сервере. Кроме того, на заданном сервере локально сохраняется величина изменения заданного параметра. Если первое заданное транспортное средство также передает другую информацию о препятствии для данного местоположения, информация о препятствии также локально сохраняется на заданном сервере.
[00229] Информация о местоположении препятствия сохраняется в привязке ко всей другой информации, относящейся к препятствию, таким образом, чтобы при получении информации о местоположении препятствия можно было бы непосредственно получить всю информацию, относящуюся к препятствию в данном местоположении.
[00230] Согласно варианту осуществления, способ обработки информации о дорожном движении также предполагает передачу информации о текущем местоположении как о заданном местоположении препятствия второму заданному транспортному средству.
[00231] Когда второе заданное транспортное средство передает информацию о маршруте движения на заданный сервер, текущее местоположение, переданное первым заданным транспортным средством, передается на второе заданное транспортное средство как заданное местоположение препятствия.
[00232] Согласно настоящему варианту осуществления, заданный сервер принимает от транспортного средства информацию о текущем местоположении и о величине изменения заданного параметра блокирования в текущем местоположении, и сравнивает информацию о текущем местоположении, переданную транспортным средством, со списком заданных местоположений препятствий, находящимся на заданном сервере. Если текущее местоположение, переданное транспортным средством, совпадает с местоположением, сохраненным локально на заданном сервере в списке заданных местоположений препятствий, сервер обновляет информацию, относящуюся к соответствующему препятствию, которая ранее была сохранена локально на заданном сервере, относящимися к препятствию данными, переданными транспортным средством.
[00233] Если текущее местоположение, переданное транспортным средством, не совпадает с местоположением, сохраненным локально на заданном сервере в списке заданных местоположений препятствий, относящиеся к препятствию данные, переданные транспортным средством, сохраняются локально на заданном сервере как новые данные. Относящаяся к препятствию информация, сохраненная локально на заданном сервере, может передаваться на транспортное средство для маршрута движения, на котором имеется препятствие.
[00234] Благодаря настоящему варианту осуществления имеется возможность получать наиболее свежую информацию о препятствиях в режиме реального времени, при этом информация о препятствиях может обновляться в режиме реального времени. Таким образом, может быть обеспечена точность информации о местоположениях препятствий и другой сопутствующей информации, хранящейся на заданном сервере, а также можно обеспечить точность информации, передаваемой заданным сервером на транспортные средства.
[00235] В другом варианте осуществления настоящего изобретения, как показано на фиг. 10, способ также предусматривает выполнение следующих шагов.
[00236] Если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий, на шаге S804 осуществляется определение местоположения из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия.
[00237] Когда местоположение совпадает с местоположением, сохраненным локально на заданном сервере в списке заданных местоположений препятствий, это означает, что текущее местоположение первого заданного транспортного средства, которое передает информацию на заданный сервер, является местоположением препятствия, ранее зарегистрированным на заданном сервере. При этом, только когда величина изменения заданного параметра блокирования первого заданного транспортного средства в данном местоположении не выходит за пределы заданного диапазона, то есть первое заданное транспортное средство не встречает препятствия в данном местоположении, информация о местоположении и о величине изменения заданного параметра блокирования при нахождении первого заданного транспортного средства в данном местоположении передается на заданный сервер.
[00238] Поэтому, если может быть определено, что текущее местоположение, передаваемое первым заданным транспортным средством, совпадает с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся локально на заданном сервере, это означает, что препятствие в местоположении препятствия, сохраненном локально на заданном сервере, фактически на дороге отсутствует.
[00239] При этом заданный сервер может определить местоположение в списке заданных местоположений препятствий, хранящемся локально на заданном сервере, соответствующее текущему местоположению, как местоположение без препятствия, и сохранить текущее местоположение и величину изменения заданного параметра блокирования в текущем местоположении, переданные первым заданным транспортным средством, и другую сопутствующую информацию. Когда на заданном сервере существует местоположение без препятствия, заданный сервер может удалить всю информацию, относящуюся к данному местоположению, экономя ресурсы памяти заданного сервера.
[00240] Например, локальный список заданных местоположений о препятствиях на заданном сервере содержит местоположение препятствия, находящееся на юго-восточном углу пересечения дороги А и дороги Б, а полученная для него величина изменения амплитуды вибраций транспортного средства составляет 50. Текущее местоположение, передаваемое транспортным средством на заданный сервер, находится на 1 метр южнее юго-восточного угла пересечения дороги А и дороги Б, полученная величина изменения амплитуды вибраций транспортного средства в данном местоположении составляет 10, заданный диапазон величины изменения амплитуды вибраций транспортного средства составляет [10, 20].
[00241] Таким образом, можно сделать вывод о том, что величина изменения амплитуды вибраций транспортного средства в данном местоположении не выходит за пределы заданного диапазона. Информация о текущем местоположении и о величине изменения амплитуды вибраций транспортного средства в данном местоположении, а также другая сопутствующая информация, переданная транспортным средством, сохраняется. Таким образом происходит обновление сохраненной на заданном сервере информации о местоположении препятствия.
[00242] Согласно описанным выше вариантам осуществления, заданный сервер может передавать информацию, относящуюся к препятствию, на второе заданное транспортное средство. Однако заданный сервер не знает, какая сопутствующая информация о препятствии должна быть передана на второе заданное транспортное средство. В связи с этим, в другом варианте осуществления настоящего изобретения, как показано на фиг. 11, способ также предусматривает выполнение следующих шагов.
[00243] На шаге S901 осуществляется сбор информации о маршруте движения второго заданного транспортного средства.
[00244] Как показано в описанных выше вариантах осуществления, после получения маршрута движения второго заданного транспортного средства, второе заданное транспортное средство передает информацию о маршруте движения на заданный сервер, а заданный сервер принимает маршрут движения, передаваемый вторым заданным транспортным средством.
[00245] На шаге S902 происходит определение факта наличия заданного местоположения препятствия по маршруту движения транспортного средства.
[00246] После приема маршрута движения, передаваемого вторым заданным транспортным средством, заданный сервер сравнивает маршрут движения с каждым местоположением препятствия, входящим в список заданных местоположений препятствий, находящийся на заданном сервере. Как показано в описанных выше вариантах осуществления, если на маршруте движения имеется местоположение препятствия, т.е. когда маршрут движения проходит через местоположение препятствия, может быть установлено, что маршрут движения второго заданного транспортного средства содержит заданное местоположение препятствия.
[00247] На шаге S903, если заданное местоположение препятствия существует по маршруту движения второго заданного транспортного средства, осуществляется передача на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий.
[00248] Если заданное местоположение препятствия существует по маршруту движения, заданный сервер локально получает информацию о заданном диапазоне заданного параметра блокирования, соответствующего заданному местоположению препятствия, а также другую информацию, относящуюся к заданному местоположению препятствия. Кроме того, эти данные передаются на второе заданное транспортное средство для того, чтобы второе заданное транспортное средство могло на основании полученных заданных местоположений препятствий и другой информации выдать водителю подсказку, благодаря которой он мог бы реагировать до подъезда к заданному местоположению препятствия.
[00249] Согласно настоящему варианту осуществления, осуществляется прием маршрута движения транспортного средства, и на основании маршрута движения определяется, имеются ли на пути движения транспортного средства заданные местоположения препятствий. Когда определяется, что заданное местоположение препятствия существует, информация о заданном местоположении препятствия и другая относящаяся к препятствию информация передается на транспортное средство, чтобы водитель имел возможность реагировать заблаговременно до подъезда к заданному местоположению препятствия, например, объезжая местоположение препятствия или снижая скорость движения.
[00250] Согласно рассмотренным выше вариантам осуществления, транспортное средство получает информацию о препятствии и передает ее на сервер. Поэтому в другом варианте осуществления настоящего изобретения способ также предусматривает выполнение следующих шагов.
[00251] 11) Принимается информация о препятствии, передаваемая первым заданным транспортным средством, при этом информация о препятствии, по меньшей мере, содержит изображения местоположения препятствия.
[00252] Первое заданное транспортное средство получает информацию о препятствии, когда первое заданное транспортное средство находится в заданном местоположении препятствия. Информация о препятствии содержит, по меньшей мере, изображения местоположения препятствия, а также может содержать скорость движения, когда первое заданное транспортного средства находится в заданном местоположении, препятствия, и голосовое оповещение водителю о заданном местоположении препятствия. Первое заданное транспортное средство передает эту информацию о препятствии на сервер, а сервер принимает эту информацию о препятствии.
[00253] 12) Информация о препятствии сохраняется локально на сервере и передается на второе заданное транспортное средство.
[00254] Сервер сохраняет принятую информацию о препятствии локально на сервере, а также привязывает информацию о препятствии к соответствующему заданному местоположению препятствия. Когда второе заданное транспортное средство запрашивает информацию о препятствии, информация о препятствии может быть передана на второе заданное транспортное средство.
[00255] Согласно рассмотренным выше вариантам осуществления, транспортное средство передает запрос на сервер. Поэтому в другом варианте осуществления настоящего изобретения, как показано на фиг. 12, способ также предусматривает выполнение следующих шагов.
[00256] На шаге S1001 осуществляется прием запроса относительно заданного местоположения препятствия от второго заданного транспортного средства.
[00257] Запрос содержит информацию о заданном местоположении препятствия, а заданный сервер принимает запрос от второго заданного транспортного средства, после чего процесс переходит к шагу S1002.
[00258] На шаге S1002 осуществляется поиск информации о препятствии, соответствующем заданному местоположению препятствия, сохраненной локально на заданном сервере.
[00259] После получения запроса с заданным местоположением препятствия заданный сервер осуществляет поиск записи для местоположения препятствия в списке заданных местоположений препятствий, соответствующей заданному местоположению препятствия. Кроме того, заданный сервер осуществляет локальный поиск информации о препятствии, соответствующем местоположению препятствия.
[00260] На шаге S1003 информация о препятствии, соответствующем заданному местоположению препятствия, передается на второе заданное транспортное средство.
[00261] В вариантах осуществления настоящего изобретения первое заданное транспортное средство и второе заданное транспортное средство могут быть одним и тем же транспортным средством.
[00262] На фиг. 13 показана блок-схема устройства для обработки информации о дорожном движении согласно примеру варианта осуществления; Как показано на фиг. 13, устройство содержит следующие компоненты: определяющий местоположение транспортного средства блок 11, определяющий местоположение препятствия блок 12, отслеживающий величину изменения параметра блок 13, первый определяющий величину изменения параметра блок 14 и первый передающий блок 15.
[00263] Получающий информацию о местоположении транспортного средства блок 11 сконфигурирован для получения информации о текущем местоположении транспортного средства в движении;
[00264] определяющий местоположение препятствия блок 12 сконфигурирован для определения, совпадает ли текущее местоположение с заданным местоположением препятствия;
[00265] отслеживающий величину изменения параметра блок 13 сконфигурирован для отслеживания величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение не совпадает с заданным местоположением препятствия;
[00266] первый определяющий величину изменения параметра блок 14 сконфигурирован для определения выхода величины изменения заданного параметра блокирования за пределы соответствующего заданного диапазона; и
[00267] первый передающий блок 15 сконфигурирован для передачи на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
[00268] Согласно другому варианту осуществления настоящего изобретения, устройство дополнительно содержит следующие компоненты: определяющий момент времени препятствия блок, принимающий информацию о препятствии блок и передающий информацию о препятствии блок.
[00269] Определяющий момент времени препятствия блок сконфигурирован для определения момента времени, когда транспортное средство находится в текущем местоположении, как момента времени препятствия, если текущее местоположение не совпадает с заданным местоположением препятствия, но величина изменения заданного параметра блокирования выходит за пределы заданного диапазона;
[00270] получающий информацию о препятствии блок, сконфигурированный для получения информации о препятствии в момент времени препятствия, при этом информация о препятствии содержит, по меньшей мере, одно изображение, полученное в течение первого заданного временного интервала до момента времени препятствия, и одно изображение, полученное в течение второго заданного временного интервала после момента времени препятствия; и
[00271] передающий информацию о препятствии блок сконфигурирован для передачи информации о препятствии на заданный сервер.
[00272] Согласно другому варианту осуществления настоящего изобретения, как показано на фиг. 14, устройство дополнительно содержит следующие компоненты: определяющий величину изменения параметра блок 16, второй определяющий величину изменения параметра блок 17 и передающий блок 18.
[00273] Определяющий величину изменения параметра блок 16, подключенный к определяющему местоположение препятствия блоку 12, сконфигурирован для определения величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение совпадает с заданным местоположением препятствия;
[00274] второй определяющий величину изменения параметра блок 17 сконфигурирован для определения нахождения величины изменения заданного параметра блокирования в пределах соответствующего заданного диапазона; и
[00275] второй передающий блок 18 сконфигурирован для передачи на заданный сервер информации о величине изменения заданного параметра блокирования и текущем местоположении, когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона.
[00276] Согласно другому варианту осуществления настоящего изобретения, устройство дополнительно содержит следующие компоненты: получающий информацию о маршруте движения блок, принимающий информацию о местоположения препятствия блок и представляющий блок.
[00277] Получающий информацию о маршруте движения блок сконфигурирован для получения информации о маршруте движения транспортного средства и передачи информации о маршруте движения на заданный сервер;
[00278] принимающий информацию о местоположении препятствия блок сконфигурирован для приема от заданного сервера заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения; и
[00279] представляющий блок сконфигурирован для локального представления на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
[00280] Согласно другому варианту осуществления настоящего изобретения, представляющее устройство дополнительно содержит следующие компоненты: получающий информацию о маршруте движения подблок, размечающий маршрут движения подблок и представляющий маршрут движения подблок.
[00281] Получающий информацию о маршруте движения подблок сконфигурирован для получения информации о маршруте движения транспортного средства;
[00282] размечающий маршрут движения подблок сконфигурирован для обозначения на маршруте движения всех заданных местоположений препятствий по маршруту движения; и
[00283] представляющий маршрут движения подблок сконфигурирован для локального представления на транспортном средстве маршрута движения с отмеченными заданными местоположениями препятствий.
[00284] Согласно другому варианту осуществления настоящего изобретения, устройство дополнительно содержит следующие компоненты: запрашивающий информацию о препятствии блок, передающий запрос блок, принимающий информацию о препятствии блок и представляющий информацию о препятствии блок.
[00285] Запрашивающий информацию о препятствии блок сконфигурирован для приема от пользователя запроса местоположений заданных препятствий по маршруту движения;
[00286] передающий запрос блок сконфигурирован для передачи запроса информации на заданный сервер;
[00287] принимающий информацию о препятствиях блок сконфигурирован для приема информации о препятствии для заданного местоположения препятствия, найденной заданным сервером в соответствии с запросом; и
[00288] представляющий информацию о препятствиях блок сконфигурирован для представления информации о препятствии для заданного местоположения препятствия.
[00289] На фиг. 15 показана блок-схема сервера согласно примеру варианта осуществления. Как показано на фиг. 15, сервер содержит следующие компоненты: принимающий блок 21, определяющий местоположение препятствия блок 22, отмечающий препятствие блок 23 и запоминающий блок 24.
[00290] Принимающий блок 21 сконфигурирован для приема информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
[00291] определяющий местоположение препятствия блок 22 сконфигурирован для определения, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере;
[00292] отмечающий препятствие блок 23 сконфигурирован для определения текущего местоположения как местоположения препятствия, если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий; и
[00293] запоминающий блок 24 сконфигурирован для локального сохранения на сервере величины изменения заданного параметра блокирования и сохранения текущего местоположения в списке заданных местоположений препятствий. Согласно варианту осуществления, сервер дополнительно содержит передающий блок, при этом передающий блок сконфигурирован для передачи на второе заданное транспортное средство текущего местоположения как заданного местоположения препятствия.
[00294] Согласно другому варианту осуществления настоящего изобретения, сервер дополнительно содержит следующие компоненты: отмечающий местоположение без препятствия блок.
[00295] Отмечающий местоположение без препятствия блок сконфигурирован для определения заданного местоположения препятствия из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия, если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий.
[00296] Согласно другому варианту осуществления настоящего изобретения, сервер дополнительно содержит следующие компоненты: принимающий информацию о маршруте движения блок, определяющий информацию о местоположении препятствия блок и передающий информацию о местоположении препятствия блок.
[00297] Принимающий информацию о маршруте движения блок сконфигурирован для приема информации о маршруте движения, передаваемой вторым заданным транспортным средством;
[00298] определяющий местоположение препятствия блок сконфигурирован для определения наличия заданного местоположения препятствия по маршруту движения; и
[00299] передающий информацию о местоположении препятствия блок сконфигурирован для передачи на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения, если заданное местоположение препятствия существует по маршруту движения.
[00300] Согласно другому варианту осуществления настоящего изобретения, сервер дополнительно содержит следующие компоненты: принимающий информацию о препятствии блок и запоминающий информацию о препятствии блок.
[00301] Принимающий информацию о препятствии блок сконфигурирован для приема, при определении текущего местоположения как местоположения препятствия, информации о препятствии для местоположения препятствия от первого заданного транспортного средства, при этом информация о препятствии содержит, по меньшей мере, изображения местоположения препятствия; и
[00302] запоминающий информацию о препятствии блок сконфигурирован для локального сохранения информации о препятствии на сервере.
[00303] Согласно другому варианту осуществления настоящего изобретения, сервер дополнительно содержит следующие компоненты: принимающий запрос блок, ищущий информацию о препятствии блок и передающий информацию о препятствии блок.
[00304] Принимающий запрос блок сконфигурирован для приема запроса относительно заданного местоположения препятствия от второго заданного транспортного средства;
[00305] ищущий информацию о препятствии блок сконфигурирован для поиска информации о препятствии, соответствующей заданному местоположению препятствия, сохраненной локально на сервере; и
[00306] передающий информацию о препятствии блок сконфигурирован для передачи информации о препятствии, соответствующей заданному местоположению препятствия, на второе заданное транспортное средство.
[00307] На фиг. 16 показана блок-схема терминала 800 согласно примеру варианта осуществления. Терминал может быть, например, мобильным телефоном, компьютером, терминалом цифрового вещания, устройством для передачи сообщений, игровой консолью, планшетным компьютером, медицинским устройством, тренажерным оборудованием, карманным компьютером и иным аналогичным устройством.
[00308] Представленный на фиг. 16 мобильный терминал может содержать один или несколько следующих блоков: процессорный блок 802, память 804, питающий блок 806, мультимедийный блок 808, звуковой блок 810, интерфейс 812 ввода-вывода (I/O), измерительный блок 814 и коммуникационный блок 816.
[00309] Процессорный блок 802 обычно управляет всеми операциями мобильного терминала, включая операции, связанные с экраном, телефонными вызовами, передачей данных, камерой и записью. Процессорный блок 802 может содержать один или несколько процессоров 820 для выполнения инструкций с целью осуществления всех или части шагов описанных выше способов. Кроме того, процессорный блок 802 может содержать один или несколько модулей, облегчающих взаимодействие между процессорным блоком 802 и другими блоками. Например, процессорный блок 802 может содержать мультимедийный модуль для облегчения взаимодействия между мультимедийным блоком 808 и процессорным блоком 802.
[00310] Память 804 сконфигурирована для хранения различных типов данных для поддержки работы мобильного терминала. Примерами таких данных могут быть инструкции для любых приложений или способов, выполняемых на мобильном терминале, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 804 может быть реализована на базе энергозависимых и энергонезависимых запоминающих устройств любого типа либо их комбинаций, включая статическое оперативное запоминающее устройство с произвольной выборкой СОЗУ (SRAM), электрически программируемое постоянное запоминающее устройство ЭППЗУ (EEPROM), стираемое программируемое постоянное запоминающее устройство СППЗУ (EPROM), программируемое постоянное запоминающее устройство ППЗУ (PROM), постоянное запоминающее устройство ПЗУ (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00311] Питающий блок 806 обеспечивает электропитание различных блоков мобильного терминала. Питающий блок 806 может содержать систему управления питанием, один или несколько источников питания, а также любые другие блоки, связанные с генерированием, управлением и распределением электропитания в мобильном терминале.
[00312] Мультимедийный блок 808 содержит экран, обеспечивающий выходной интерфейс между мобильным терминалом и пользователем. В некоторых вариантах осуществления экран может содержать жидкокристаллический дисплей ЖКД (LCD) и сенсорную панель СП (TP). Если экран содержит сенсорную панель, экран может быть реализован в виде сенсорного дисплея для получения входных сигналов от пользователя. Сенсорная панель содержит один или несколько датчиков касания, реагирующих на касания, движения и иные жесты на сенсорной панели. Сенсоры касания могут не только обнаруживать различия между касаниями и движениями, но также реагировать на длительность или давление, связанные с касанием или движением. В некоторых вариантах осуществления мультимедийный блок 808 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут получать внешние мультимедийные данные, когда мобильный терминал находится в таких режимах работы, как режим фотографирования или режим видеосъемки. Как передняя, так и задняя камеры могу быть системами с фиксированными оптическими линзами либо иметь функции фокусировки и оптического масштабирования.
[00313] Звуковой блок 810 сконфигурирован для вывода и/или ввода звуковых сигналов. К примеру, звуковой блок 810 содержит микрофон ("MIC"), сконфигурированный для приема внешнего звукового сигнала, когда мобильный терминал находится в таких режимах работы, как режим вызова, режим записи и режим распознавания голоса. Принимаемый звуковой сигнал может далее сохраняться в памяти 804 или передаваться посредством коммуникационного блока 816. В некоторых вариантах осуществления звуковой блок 810, кроме того, содержит динамик для вывода звукового сигнала.
[00314] Интерфейс 812 I/O обеспечивает интерфейс между процессорным блоком 802 и периферийными интерфейсными модулями, к которым относятся клавиатура, манипулятор "click wheel", кнопки и другие подобные модули. К кнопкам, в частности, относятся кнопка Ноте, кнопка регулировки уровня звука, кнопка включения питания и кнопка блокировки.
[00315] Измерительный блок 814 содержит один или несколько датчиков, обеспечивающих оценку состояния различных параметров мобильного терминала. Например, измерительный блок 814 может определять открытое/закрытое состояние мобильного терминала, относительное расположение блоков мобильного терминала, например, экрана и клавиатуры, изменение положения мобильного терминала или блоков мобильного терминала, наличие или отсутствия контакта мобильного терминала с пользователем, ориентацию или ускорение/замедление перемещения мобильного терминала, а также изменение температуры мобильного терминала. Измерительный блок 814 может содержать датчик близости, сконфигурированный для обнаружения присутствия близлежащих объектов без физического контакта с ними. Измерительный блок 814 может также содержать световой датчик, например датчик изображения типа CMOS или CCD, для использования в приложениях, связанных с изображениями. В некоторых вариантах осуществления измерительный блок 814 может также содержать акселерометр, гироскоп, магнитный датчик, датчик давления или температурный датчик.
[00316] Коммуникационный блок 816 сконфигурирован для облегчения связи, как проводной, так и беспроводной, между мобильным терминалом и другими устройствами. Мобильный терминал может получать доступ к беспроводной сети на базе коммуникационных стандартов, включая WiFi, 2G или 3G, либо их сочетаний. Согласно одному из примеров варианта осуществления, коммуникационный блок 816 принимает широковещательный сигнал или связанную с вещанием информацию из внешней системы управления вещанием по широковещательному каналу. Согласно одному из примеров варианта осуществления, коммуникационный блок 816 содержит модуль беспроводной связи ближнего радиуса (NFC) для облегчения связи на малых расстояниях. Например, модуль NFC может быть реализован на базе технологии радиочастотной идентификации (RFID), технологии инфракрасной передачи данных (IrDA), технологии сверхширокополосной связи (UWB), технологии Bluetooth (ВТ) и других технологий.
[00317] Согласно примерам варианта осуществления, мобильный терминал может быть реализован на базе одной или нескольких специализированных интегральных схем (ASIC), цифровых процессоров обработки сигналов (DSP), устройств с цифровыми процессорами обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых логических матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или иных электронных компонентов для реализации вышеописанных способов.
[00318] Согласно примерам варианта осуществления, также предусматривается машиночитаемый носитель информации, содержащий инструкции, аналогично записанным в памяти 804, выполняемые процессором 820 в мобильном терминале для выполнения вышеописанных способов. Например, машиночитаемый носитель информации может быть ROM, RAM, CD-ROM, магнитной лентой, гибким диском, оптическим запоминающим устройством или иным аналогичным устройством.
[00319] Машиночитаемый носитель информации позволяет терминалу выполнять способ обработки информации о дорожном движении при выполнении процессором терминала команд, находящихся в памяти. Способ состоит из следующих действий:
[00320] сбор информации о текущем местоположении движущегося транспортного средства;
[00321] определение, совпадает ли текущее местоположение транспортного средства с заданным местоположением препятствия;
[00322] отслеживание величины изменения заданного параметра блокирования в текущем местоположении транспортного средства и определение, выходит ли величина изменения заданного параметра блокирования за пределы соответствующего заданного диапазона, если текущее местоположение транспортного средства не является заданным местоположением препятствия; и
[00323] передача на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
[00324] На фиг. 17 показана блок-схема сервера 1900 согласно примеру варианта осуществления. Сервер 1900 может использоваться, к примеру, в качестве сервера. Как показано на фиг. 17, сервер 1900 содержит процессорный блок 1922, который дополнительно содержит один или несколько процессоров и ресурсы памяти, представленные памятью 1932, для хранения инструкций, выполняемых процессорным блоком 1922, например, прикладных программ. Прикладные программы, хранящиеся в памяти 1932, могут состоять из одного или нескольких модулей, каждому из которых соответствует набор инструкций.
[00325] Сервер 1900 может также содержать питающий блок 1926, сконфигурированный обеспечения электропитания сервера 1900, проводного или беспроводного сетевого интерфейса (интерфейсов) 1950, сконфигурированных для подключения сервера 1900 к сети, и интерфейса 1958 ввода/вывода (I/O). Сервер 1900 может функционировать под управлением хранящейся в памяти 1932 операционной системы, которой может быть Windows Server™, Mac OS X™, Unix™, Linux™, FreeBSD™ или иная подобная система.
[00326] Машиночитаемый носитель информации позволяет серверу выполнять способ обработки информации о дорожном движении при выполнении процессором сервера команд, находящихся в памяти. Способ состоит из следующих действий:
[00327] прием информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
[00328] определение, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере; и
[00329] определение текущего местоположения как местоположения препятствия, локальное сохранение на сервере величины изменения заданного параметра блокирования и сохранение текущего местоположения в списке заданных местоположений препятствий, если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий.
[00330] Следует заметить, что используемые в настоящем документе такие относительные термины, как "первый" и "второй", используются исключительно для указания отличия одного предмета или одного действия от другого предмета или другого действия, но не устанавливают и не подразумевают содержательные отношения между этими предметами или действиями или их порядок. Кроме того, понятия "включает", "содержит" либо любые содержащие их словосочетания используются в значении неисключительного включения, то есть процесс, способ, компонент или устройство, содержащие ряд элементов, не только включают в себя эти элементы, но также содержат другие элементы, которые специально не оговариваются, либо также содержат неотъемлемые элементы таких процесса, способа, компонента или устройства. Без каких-либо ограничений элемент, определенный понятием "содержит", не означает, что другие элементы исключаются из процесса, способа, компонента или устройства, включая сам элемент.
[00331] Приведенное выше описание представляет конкретные варианты осуществления настоящего изобретения, позволяющие специалистам в данной области понять и использовать настоящее изобретение. Специалисты в данной области техники могут без труда обнаружить возможность внесения различных изменений в приведенные варианты осуществления. Определенные здесь общие принципы могут быть применены в других вариантах осуществления, не противоречащих общему смыслу настоящего изобретения и не выходящих за его рамки. Таким образом, настоящее изобретение не только не ограничивается приведенными здесь вариантами осуществления, но и должно получить максимально широкий спектр применения в соответствии с раскрытыми здесь принципами и новыми свойствами.
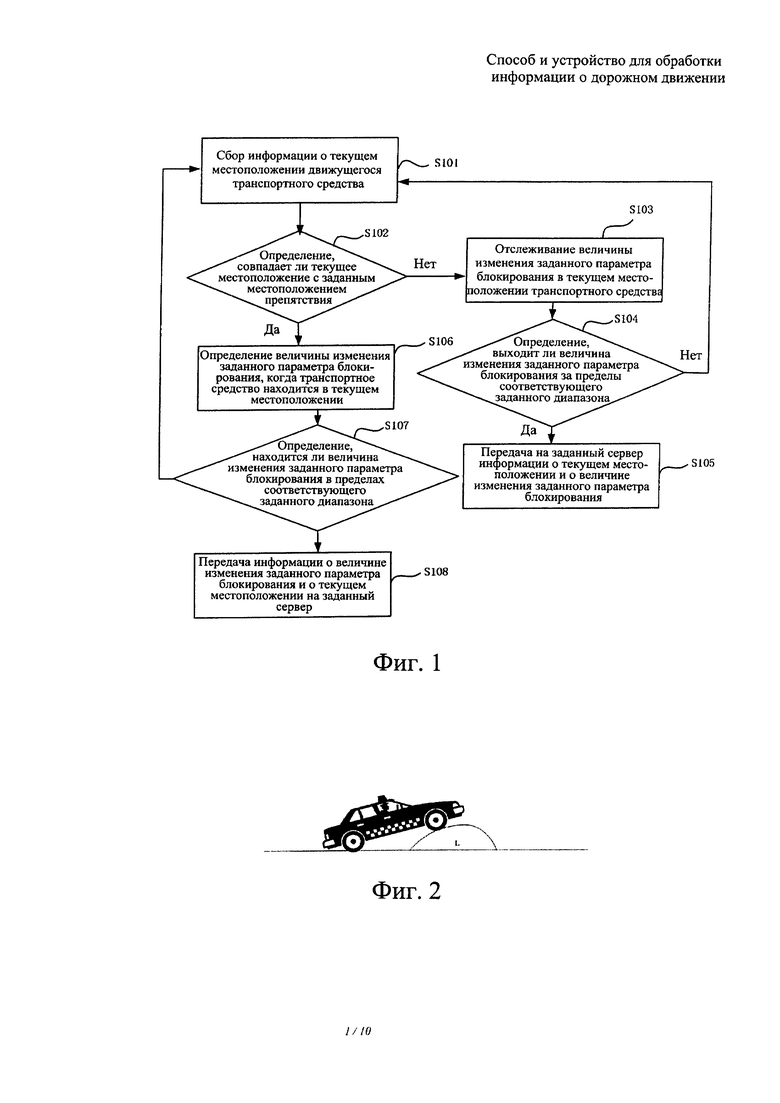
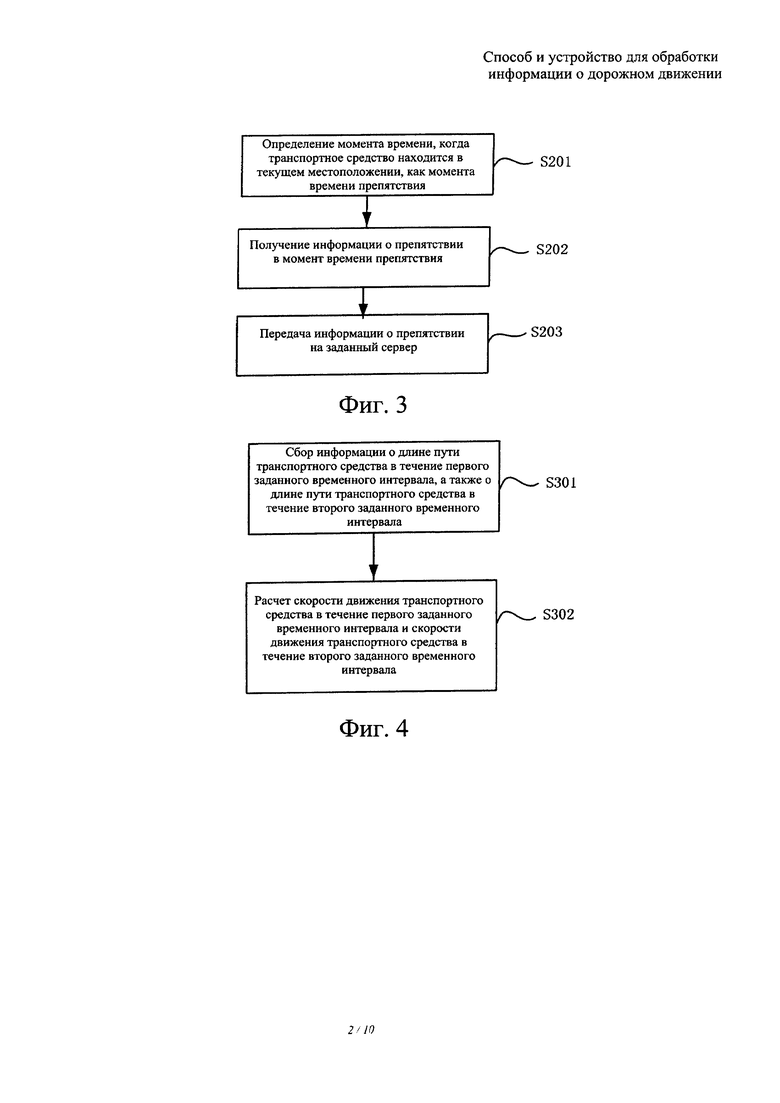
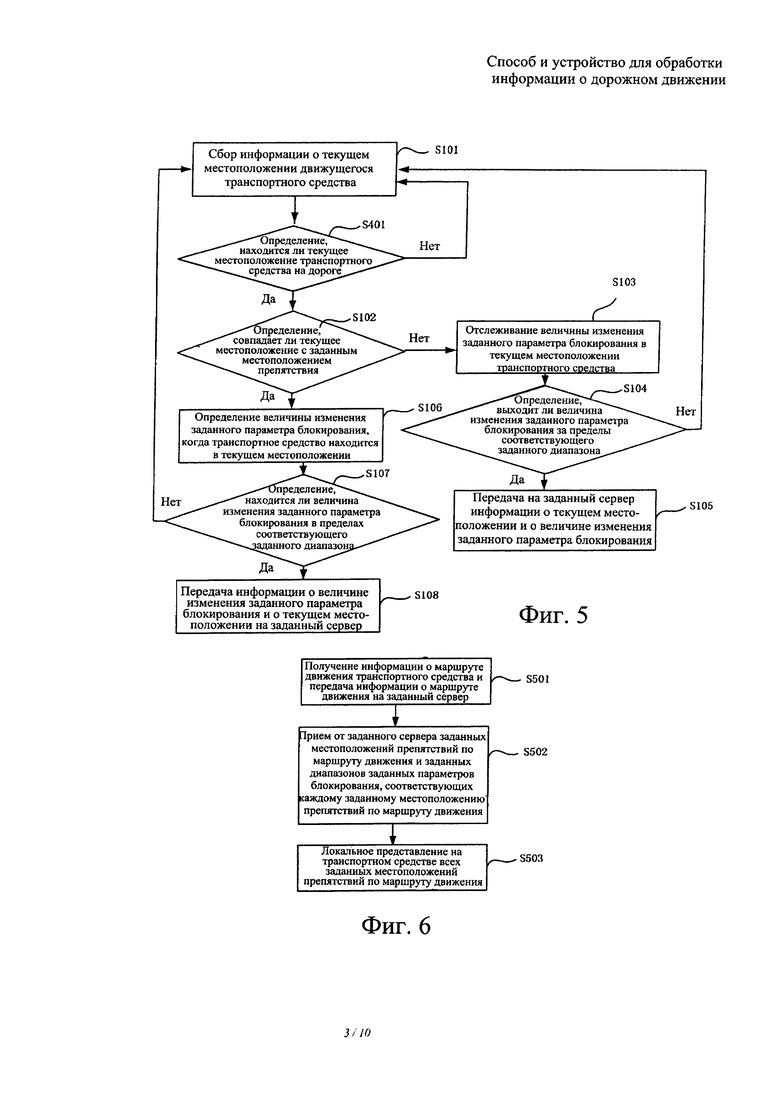
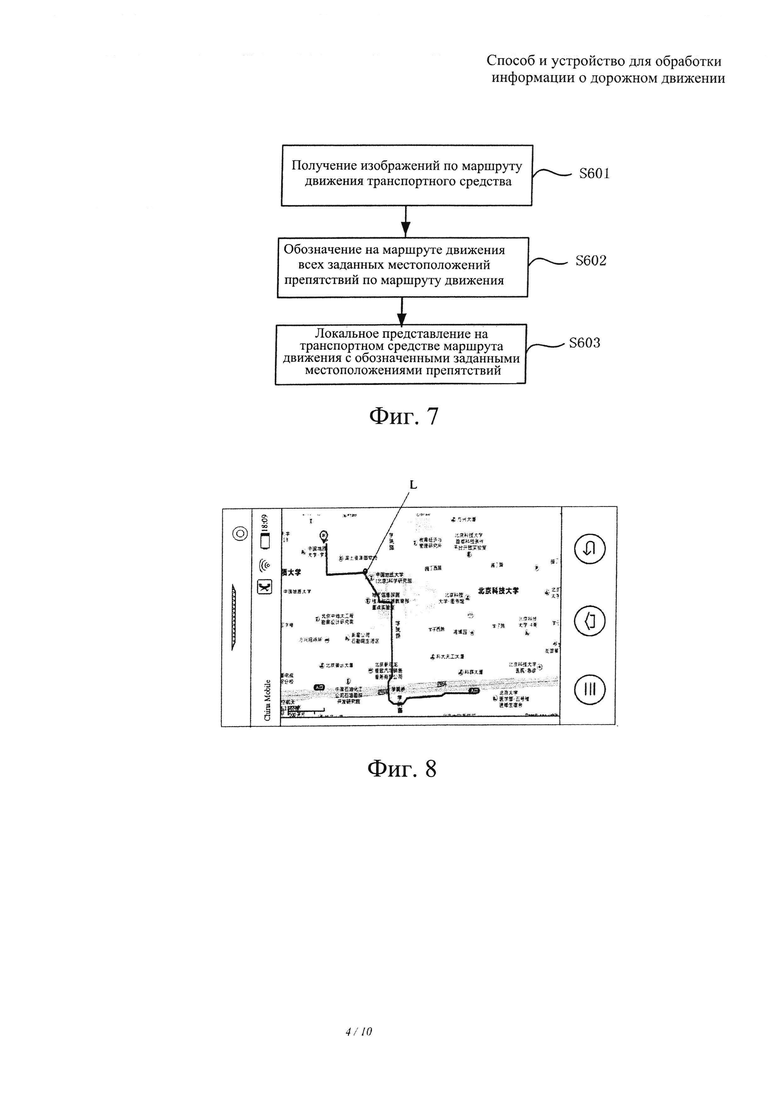
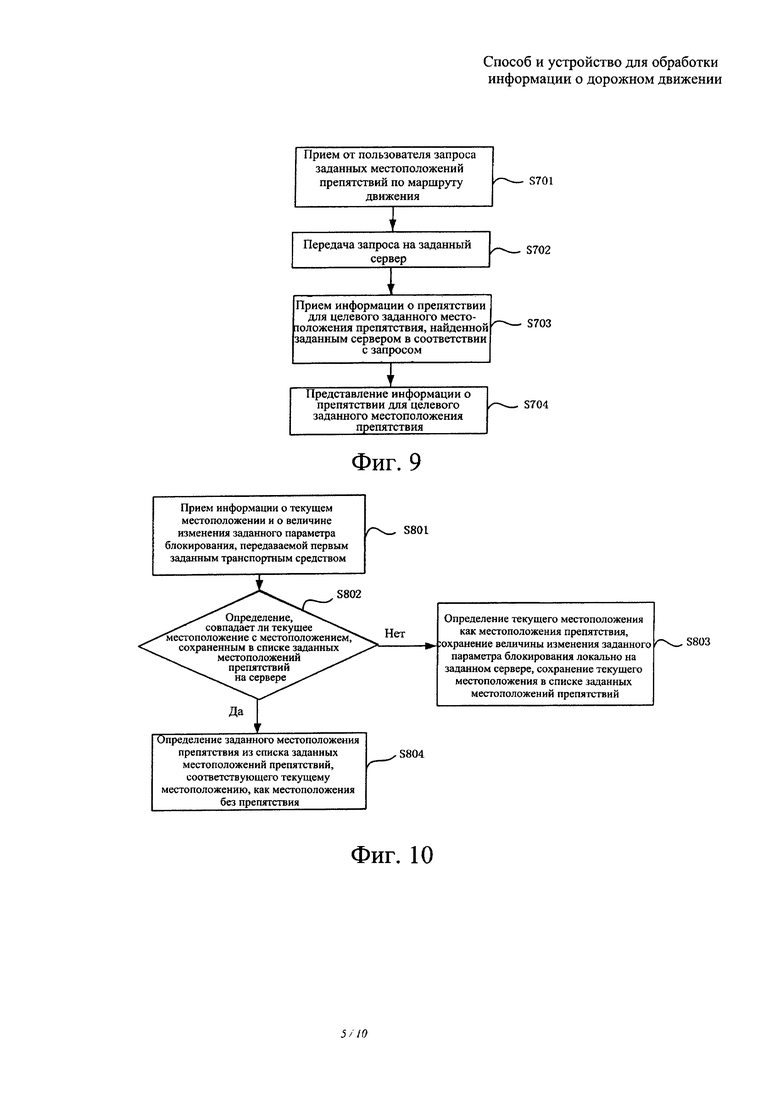

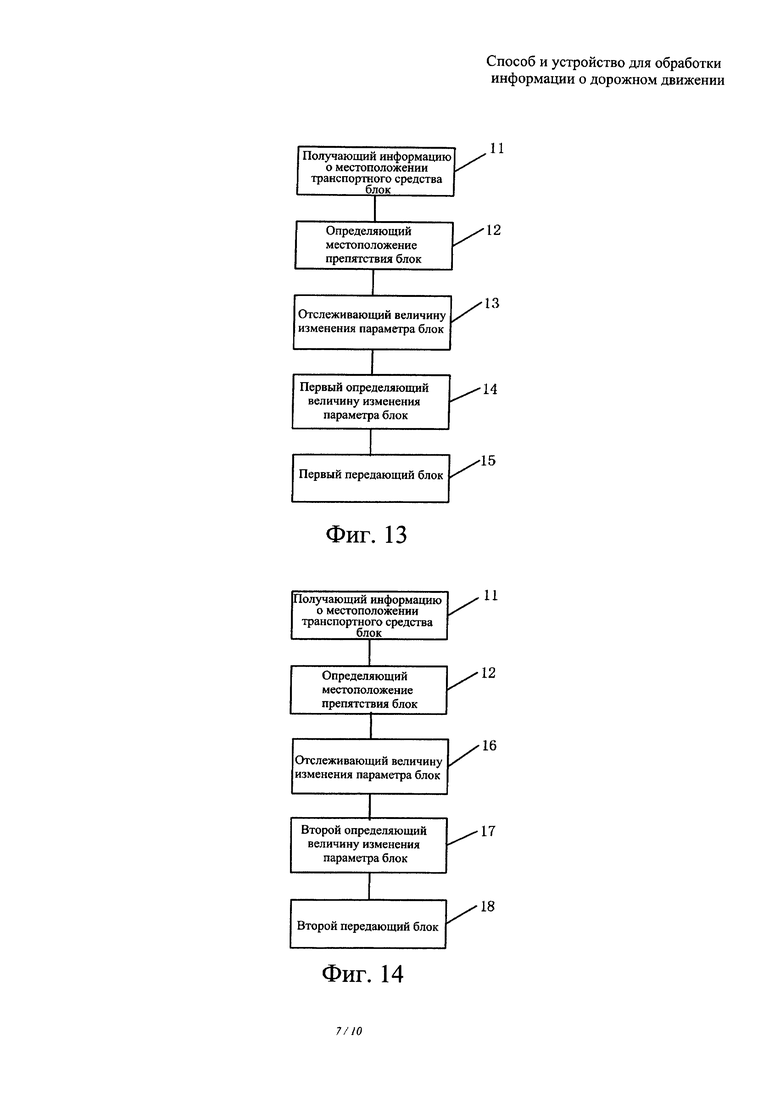
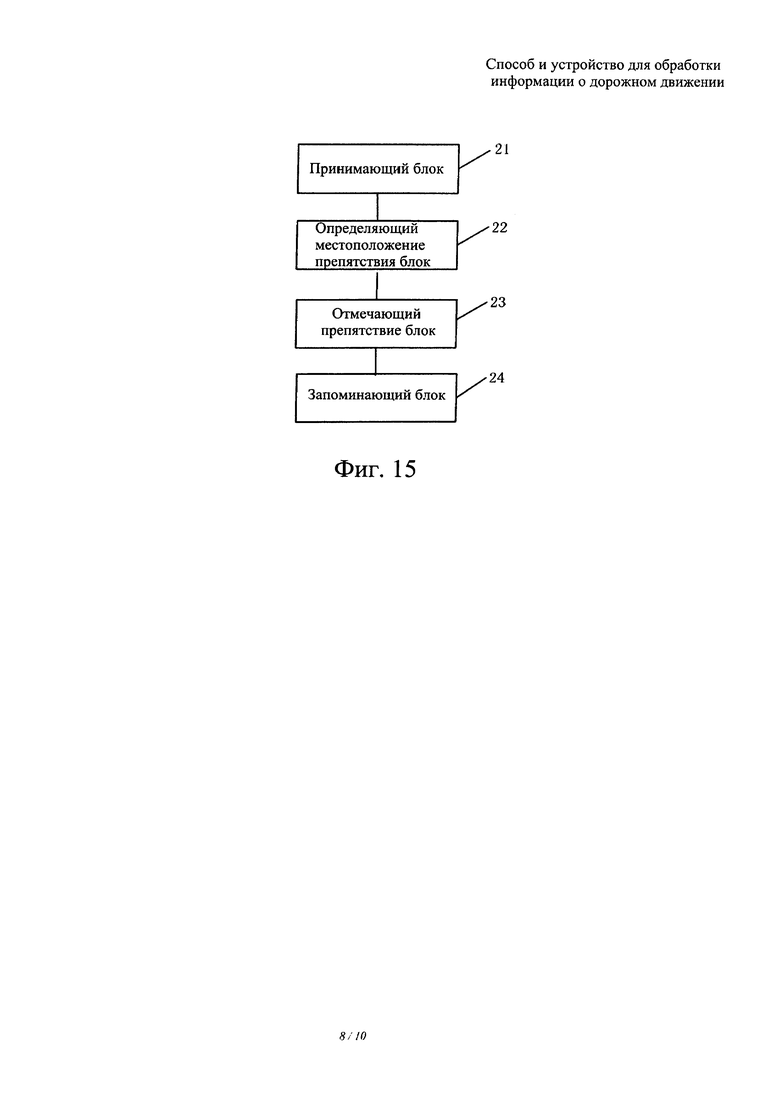
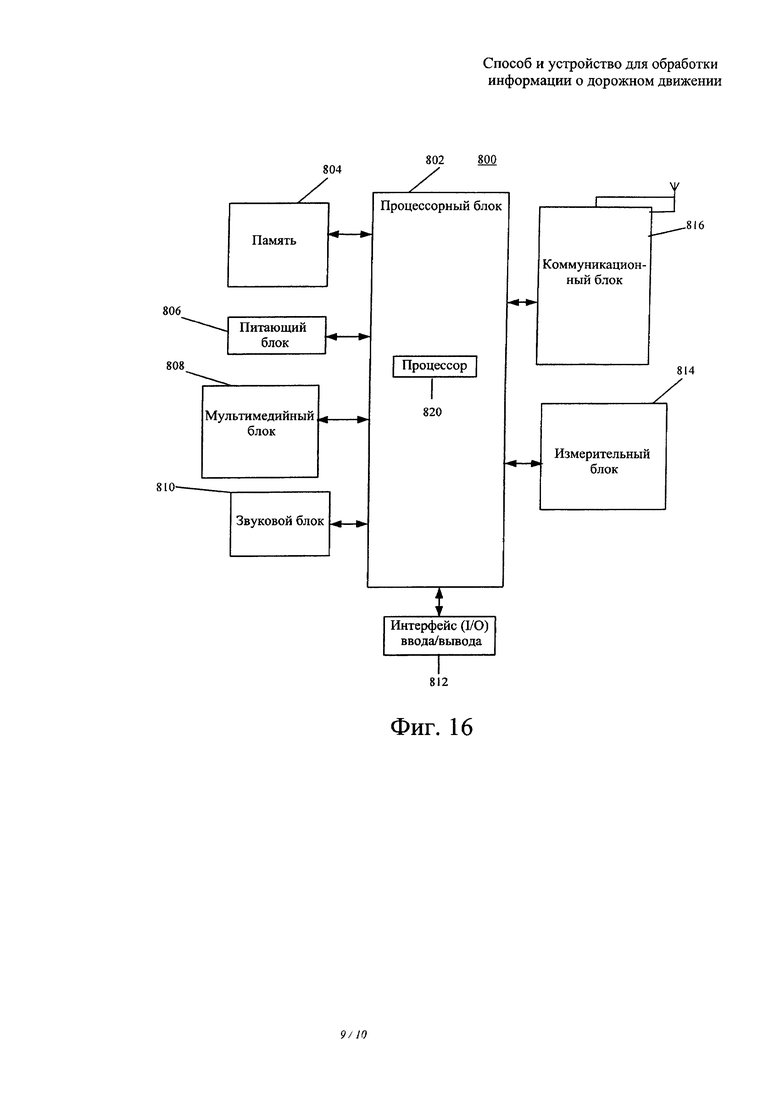
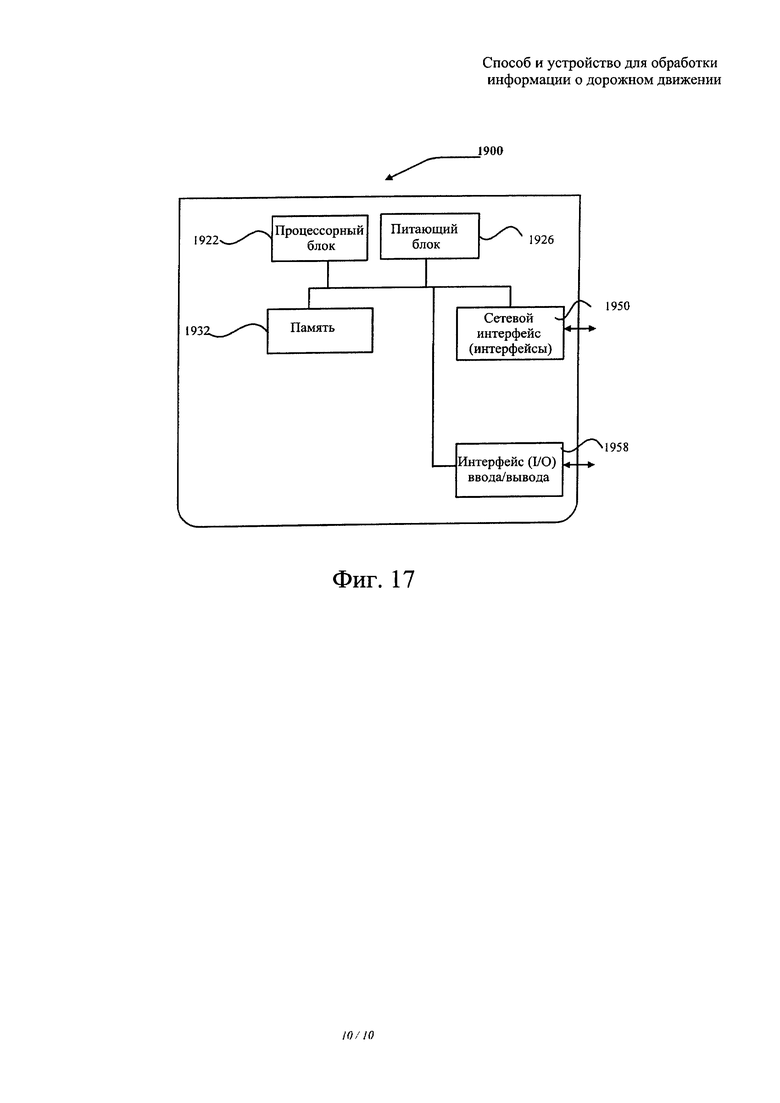
Изобретение относится к области навигационного приборостроения и может найти применение для обработки информации о дорожном движении. Технический результат – расширение функциональных возможностей. Для этого осуществляют: сбор информации о текущем местоположении движущегося транспортного средства; отслеживание величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение не является заданным местоположением препятствия; передача на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, если величина изменения заданного параметра блокирования выходит за пределы заданного диапазона. В результате водители могут в режиме реального времени получать точную информацию о находящихся на пути препятствиях и могут заблаговременно на нее реагировать, снижая скорость движения или выбирая обходной маршрут. 4 н. и 20 з.п. ф-лы, 17 ил.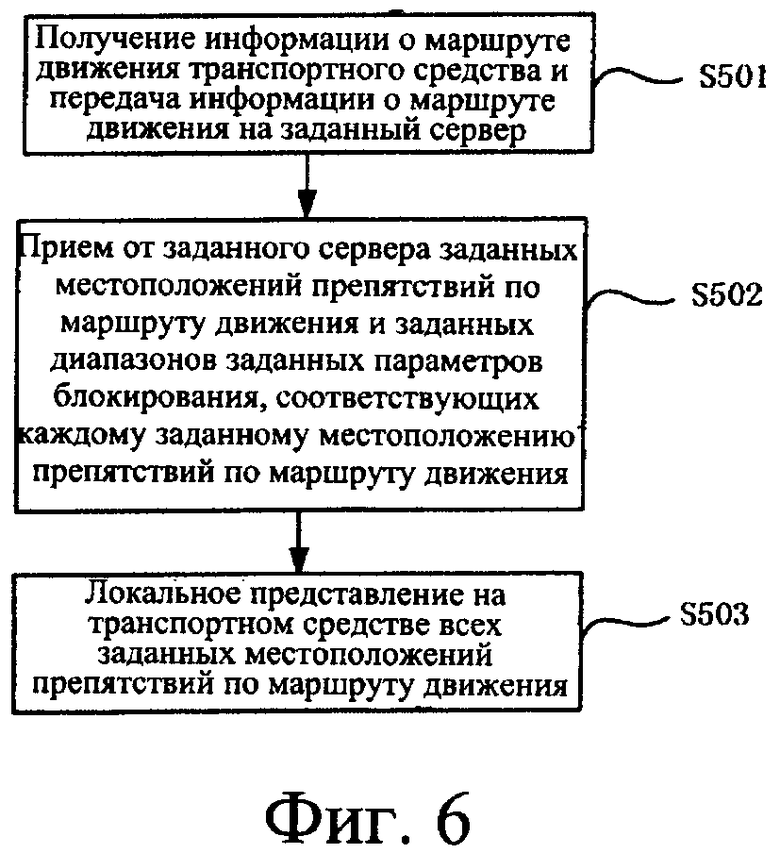
1. Способ обработки информации о дорожном движении, применяемый в терминале и включающий:
сбор информации о текущем местоположении движущегося транспортного средства;
определение, является ли текущее местоположение заданным местоположением препятствия;
если текущее местоположение не является заданным местоположением препятствия, отслеживание величины изменения заданного параметра блокирования в текущем местоположении транспортного средства и определение, выходит ли величина изменения заданного параметра блокирования за пределы соответствующего заданного диапазона; и
передача на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
2. Способ по п. 1, отличающийся тем, что он включает:
определение момента времени, когда транспортное средство находится в текущем местоположении, как момента времени препятствия, если текущее местоположение не совпадает с заданным местоположением препятствия, но величина изменения заданного параметра блокирования выходит за пределы заданного диапазона;
получение информации о препятствии в момент времени препятствия, при этом информация о препятствии содержит по меньшей мере одно из изображения, полученного в течение первого заданного временного интервала до момента времени препятствия, и изображения, полученного в течение второго заданного временного интервала после момента времени препятствия; и
передача информации о препятствии на заданный сервер.
3. Способ по п. 1, отличающийся тем, что он включает:
если текущее местоположение является заданным местоположением препятствия, определение величины изменения заданного параметра блокирования в текущем местоположении транспортного средства и определение, находится ли величина изменения заданного параметра блокирования в пределах соответствующего заданного диапазона; и
передача на заданный сервер информации о величине изменения заданного параметра блокирования и о текущем местоположении, когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона.
4. Способ по любому из пп. 1-3, отличающийся тем, что он включает:
получение информации о маршруте движения транспортного средства и передача информации о маршруте движения транспортного средства на заданный сервер;
прием от заданного сервера заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения; и
локальное представление на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
5. Способ по п. 4, отличающийся тем, что локальное представление на транспортном средстве всех заданных местоположений препятствий по маршруту движения включает:
получение информации о маршруте движения транспортного средства;
обозначение на маршруте движения всех заданных местоположений препятствий по маршруту движения; и
локальное представление на транспортном средстве маршрута движения с обозначенными заданными местоположениями препятствий.
6. Способ по п. 5, отличающийся тем, что он включает:
прием от пользователя запроса заданных местоположений препятствий по маршруту движения;
передача запроса на заданный сервер;
прием информации о препятствиях для заданных местоположений препятствий, найденной заданным сервером в соответствии с запросом; и
представление информации о препятствиях для заданных местоположений препятствий.
7. Способ обработки информации о дорожном движении, применяемый на сервере и включающий:
прием информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
определение, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере; и
если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий, определение текущего местоположения как местоположения препятствия, локальное сохранение на сервере величины изменения заданного параметра блокирования и сохранение текущего местоположения в списке заданных местоположений препятствий.
8. Способ по п. 7, отличающийся тем, что он включает:
прием информации о маршруте движения, передаваемой вторым заданным транспортным средством;
определение факта наличия заданного местоположения препятствия по маршруту движения; и
передача на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения, если заданное местоположение препятствия существует по маршруту движения.
9. Способ по п. 7, отличающийся тем, что он включает:
определение заданного местоположения препятствия из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия, если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий.
10. Способ по п. 7, отличающийся тем, что он включает:
при определении текущего местоположения как местоположения препятствия, прием информации о препятствии для местоположения препятствия от первого заданного транспортного средства, при этом информация о препятствии содержит, по меньшей мере, изображения местоположения препятствия; и
локальное сохранение информации о препятствии на заданном сервере.
11. Способ по п. 10, отличающийся тем, что он включает:
прием запроса относительно заданного местоположения препятствия от второго заданного транспортного средства;
поиск информации о препятствии, соответствующем заданному местоположению препятствия, сохраненной локально на сервере; и
передача информации о препятствии, соответствующем заданному местоположению препятствия, второму заданному транспортному средству.
12. Способ по п. 8 или 11, отличающийся тем, что первое заданное транспортное средство и второе заданное транспортное средство являются одним и тем же транспортным средством.
13. Терминал для обработки информации о дорожном движении, содержащий:
получающий информацию о местоположении транспортного средства блок, сконфигурированный для получения информации о текущем местоположении транспортного средства в движении;
определяющий местоположение препятствия блок, сконфигурированный для определения, совпадает ли текущее местоположение с заданным местоположением препятствия;
отслеживающий величину изменения параметра блок, сконфигурированный для отслеживания величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение не совпадает с заданным местоположением препятствия;
первый определяющий величину изменения параметра блок, сконфигурированный для определения выхода величины изменения заданного параметра блокирования за пределы соответствующего заданного диапазона; и
первый передающий блок, сконфигурированный для передачи на заданный сервер информации о текущем местоположении и о величине изменения заданного параметра блокирования, когда величина изменения заданного параметра блокирования выходит за пределы заданного диапазона.
14. Терминал по п. 13, отличающийся тем, что терминал дополнительно содержит:
определяющий момент времени препятствия блок, сконфигурированный для определения момента времени, когда транспортное средство находится в текущем местоположении, как момента времени препятствия, если текущее местоположение не совпадает с заданным местоположением препятствия, но величина изменения заданного параметра блокирования выходит за пределы заданного диапазона;
получающий информацию о препятствии блок, сконфигурированный для получения информации о препятствии в момент времени препятствия, при этом информация о препятствии содержит, по меньшей мере, одно из изображения, полученного в течение первого заданного временного интервала до момента времени препятствия, и изображения, полученного в течение второго заданного временного интервала после момента времени препятствия; и
передающий информацию о препятствии блок, сконфигурированный для передачи информации о препятствии на заданный сервер.
15. Терминал по п. 13, отличающийся тем, что терминал дополнительно содержит следующие компоненты:
определяющий величину изменения параметра блок, сконфигурированный для определения величины изменения заданного параметра блокирования в текущем местоположении транспортного средства, если текущее местоположение совпадает с заданным местоположением препятствия;
второй определяющий величину изменения параметра блок, сконфигурированный для определения нахождения величины изменения заданного параметра блокирования в пределах соответствующего заданного диапазона; и
второй передающий блок, сконфигурированный для передачи на заданный сервер информации о величине изменения заданного параметра блокирования и о текущем местоположении, когда величина изменения заданного параметра блокирования не выходит за пределы заданного диапазона.
16. Терминал по любому из пп. 13-15, отличающийся тем, что терминал дополнительно содержит следующие компоненты:
получающий информацию о маршруте движения блок, сконфигурированный для получения информации о маршруте движения транспортного средства и передачи информации о маршруте движения на заданный сервер;
принимающий информацию о местоположении препятствия блок, сконфигурированный для приема от заданного сервера заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения; и
представляющий блок, сконфигурированный для локального представления на транспортном средстве всех заданных местоположений препятствий по маршруту движения.
17. Терминал по п. 16, отличающийся тем, что представляющий блок дополнительно содержит следующие компоненты:
получающий информацию о маршруте движения подблок, сконфигурированный для получения информации о маршруте движения транспортного средства;
размечающий маршрут движения подблок, сконфигурированный для обозначения на маршруте движения всех заданных местоположений препятствий по маршруту движения; и
представляющий маршрут движения подблок, сконфигурированный для локального представления на транспортном средстве маршрута движения с отмеченными заданными местоположениями препятствий.
18. Терминал по п. 17, отличающийся тем, что терминал дополнительно содержит следующие компоненты:
запрашивающий информацию о препятствии блок, сконфигурированный для приема от пользователя запроса заданных местоположений препятствий по маршруту движения;
передающий запрос блок, сконфигурированный для передачи запроса на заданный сервер;
принимающий информацию о препятствии блок, сконфигурированный для приема информации о препятствии для заданного местоположения препятствия, найденной заданным сервером в соответствии с запросом; и
представляющий информацию о препятствии блок, сконфигурированный для представления информации о препятствии для заданного местоположения препятствия.
19. Сервер, содержащий:
принимающий блок, сконфигурированный для приема информации о текущем местоположении и о величине изменения заданного параметра блокирования, передаваемой первым заданным транспортным средством;
определяющий местоположение препятствия блок, сконфигурированный для определения, совпадает ли текущее местоположение с местоположением, сохраненным в списке заданных местоположений препятствий, хранящемся на сервере;
отмечающий препятствие блок, сконфигурированный для определения текущего местоположения как местоположения препятствия, если текущее местоположение не совпадает с местоположением, сохраненным в списке заданных местоположений препятствий; и
запоминающий блок, сконфигурированный для локального сохранения на сервере величины изменения заданного параметра блокирования и сохранения текущего местоположения в списке заданных местоположений препятствий.
20. Сервер по п. 19, отличающийся тем, что он дополнительно содержит:
принимающий информацию о маршруте движения блок, сконфигурированный для приема информации о маршруте движения, передаваемой вторым заданным транспортным средством;
определяющий местоположение препятствия блок, сконфигурированный для определения наличия заданного местоположения препятствия по маршруту движения; и
передающий информацию о местоположении препятствия блок, сконфигурированный для передачи на второе заданное транспортное средство всех заданных местоположений препятствий по маршруту движения и заданных диапазонов заданных параметров блокирования, соответствующих каждому заданному местоположению препятствий по маршруту движения, если заданное местоположение препятствия существует по маршруту движения.
21. Сервер по п. 19, отличающийся тем, что он дополнительно содержит:
отмечающий местоположение без препятствия блок, сконфигурированный для определения заданного местоположения препятствия из списка заданных местоположений препятствий, соответствующего текущему местоположению, как местоположения без препятствия, если текущее местоположение соответствует местоположению, сохраненному в списке заданных местоположений препятствий.
22. Сервер по п. 19, отличающийся тем, что он дополнительно содержит:
принимающий информацию о препятствии блок, сконфигурированный, при определении текущего местоположения как местоположения препятствия, для приема информации о препятствии для местоположения препятствия от первого заданного транспортного средства, при этом информация о препятствии содержит, по меньшей мере, изображение местоположения препятствия; и
запоминающий информацию о препятствии блок, сконфигурированный для локального сохранения информации о препятствии на сервере.
23. Сервер по п. 22, отличающийся тем, что он дополнительно содержит:
принимающий запросы блок, сконфигурированный для приема запроса относительно заданного местоположения препятствия от второго заданного транспортного средства;
ищущий информацию о препятствии блок, сконфигурированный для поиска информации о препятствии, соответствующем заданному местоположению препятствия, сохраненной локально на сервере; и
передающий информацию о препятствии блок, сконфигурированный для передачи информации о препятствии, соответствующем заданному местоположению препятствия, второму заданному транспортному средству.
24. Сервер по п. 20 или 23, отличающийся тем, что первое заданное транспортное средство и второе заданное транспортное средство являются одним и тем же транспортным средством.
| Подвесное здание повышенной этажности | 1985 |
|
SU1357529A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ КАРТЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОТОБРАЖЕНИЯ КАРТЫ | 2009 |
|
RU2404409C1 |
| WO 2004003788 A2, 08.01.2004 | |||
| US 2005128102 A1, 16.06.2005 | |||
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |
| US 5982298 A, 09.11.1999. | |||

