[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления информацией о полосах движения, способу управления движением и устройству управления информацией о полосах движения.
[Уровень техники]
[0002]
На данный момент известен способ моделирования структуры перекрёстка (патентный документ 1: JP2016-75905A). Этот способ включает в себя компиляцию набора потенциальных соединений между местоположениями узлов полос движения и оценку для каждого соединения вероятности того, что соединение является действительным соединением, подлежащим использованию для модели перекрёстка.
[Документ из техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2016-75905A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
К сожалению, вышеупомянутому уровню техники присуща проблема того, что он не может реагировать на полосу движения, в которой в одной полосе движения сформированы два или более рядов транспортных средств, и управление информацией о полосах движения не может осуществляться надлежащим образом.
[0005]
Задача, решаемая настоящим изобретением, состоит в создании способа и устройства, посредством которых возможно надлежащее управление информацией о полосах движения.
[Средство для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую задачу путем определения с использованием множества историй движения, того, образуют ли два или более транспортных средств в полосе движения, соединенной с перекрестком, разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения, и управления информацией о полосах движения, включая результат определения многополосной формы в информацию о полосе движения.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению может быть получен эффект, состоящий в том, что возможно надлежащее управление информацией о полосах движения.
[Краткое описание чертежей]
[0008]
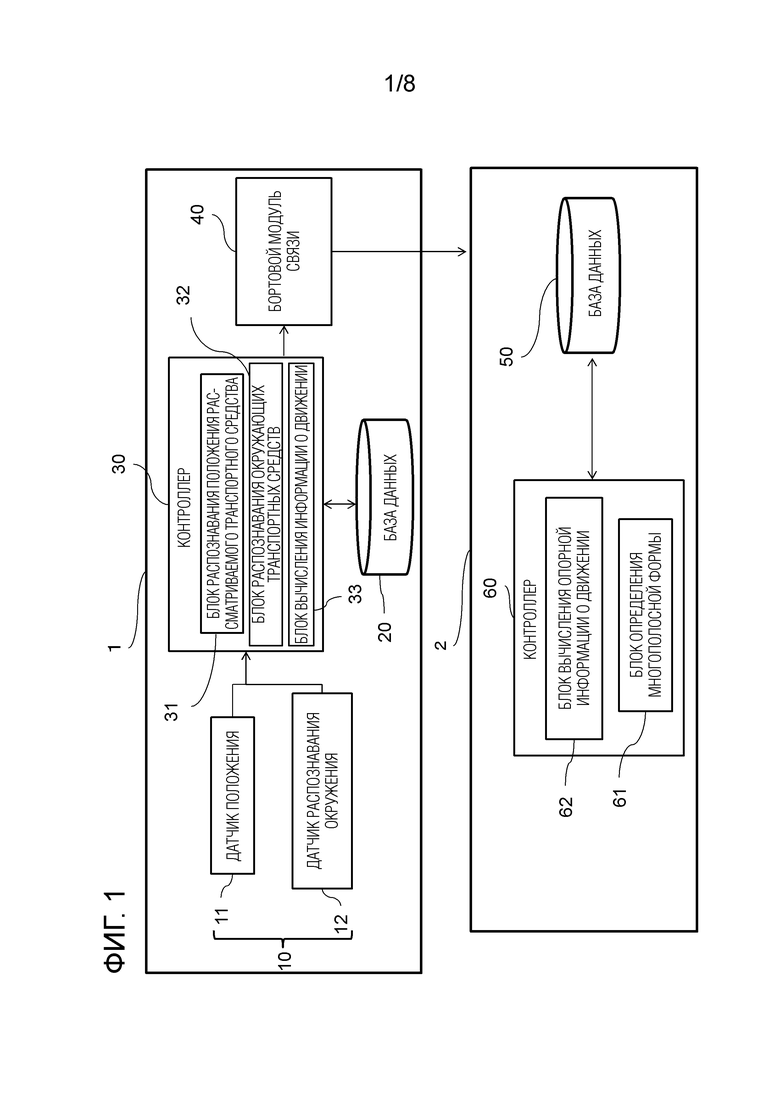
На фиг.1 показана блок-схема системы управления информацией в соответствии с одним или более вариантами осуществления настоящего изобретения.
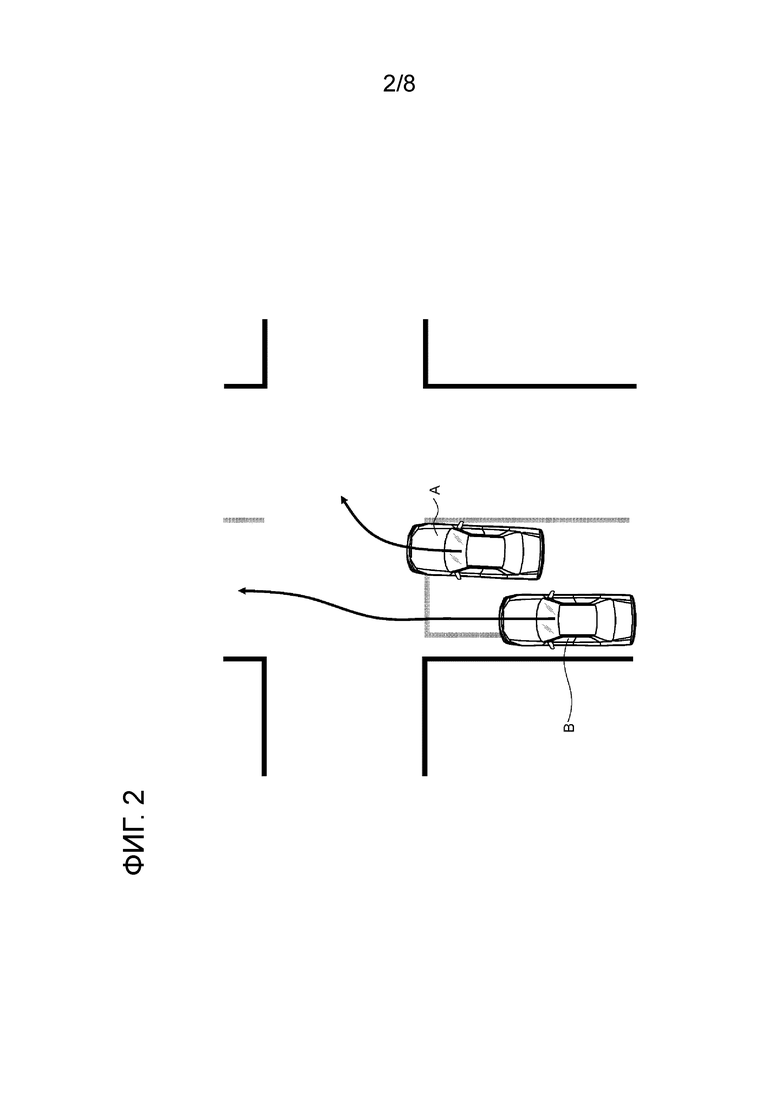
Фиг. 2 - принципиальная схема для описания дорожной ситуации, в которой полоса движения имеет многополосную форму.
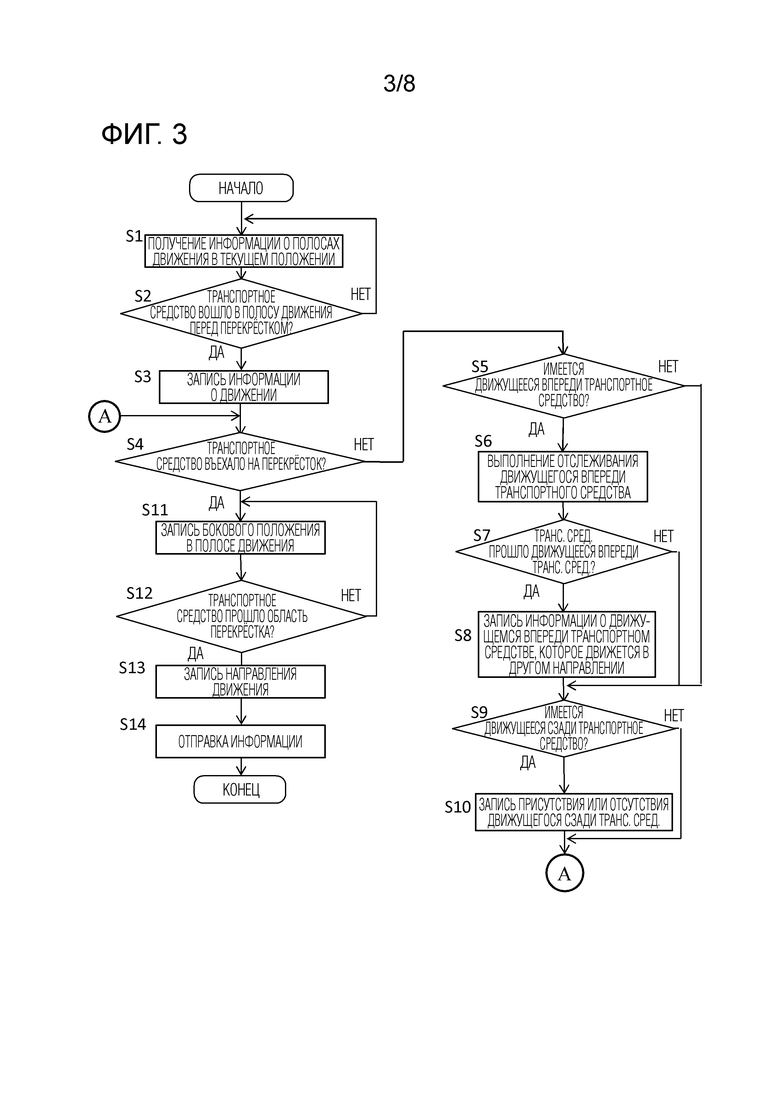
Фиг. 3 - блок-схема, иллюстрирующая последовательность операций управления в блоке вычисления информации о движении по фиг. 1.
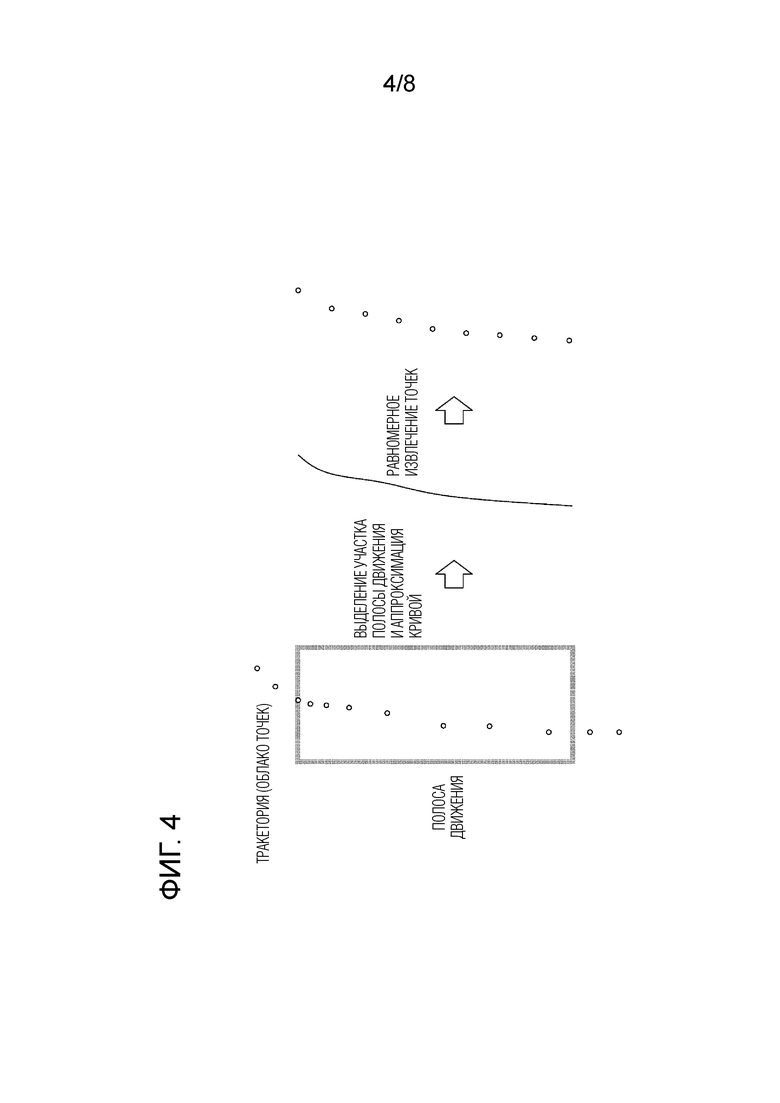
Фиг. 4 является схемой для описания процесса, выполняемого в блоке определения многополосной формы по фиг. 1, то есть принципиальной схемой процесса выравнивания числа точек на траектории.
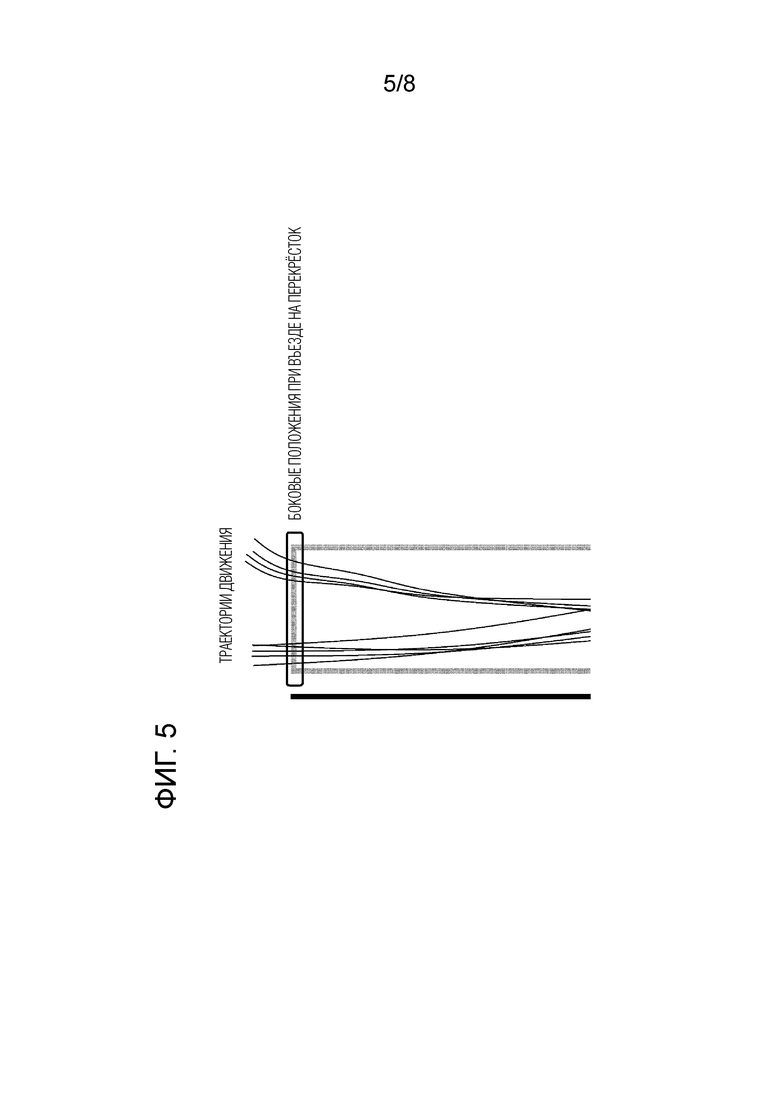
Фиг.5 - принципиальная схема, иллюстрирующая пример распределения боковых положений транспортных средств в полосе движения в многополосной форме.
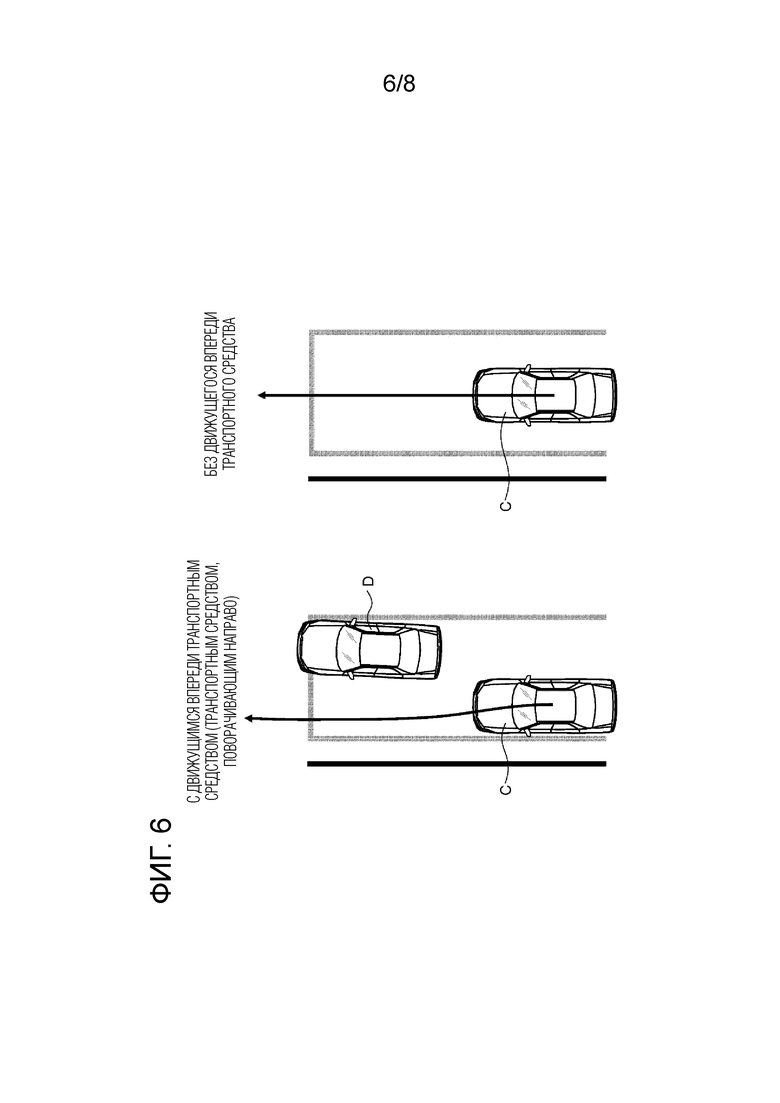
Фиг. 6 представляет собой набор принципиальных схем, иллюстрирующих траекторию движения рассматриваемого транспортного средства, когда имеется движущееся впереди транспортное средство (поворачивающие направо транспортное средство), и траекторию движения рассматриваемого транспортного средства, когда движущееся впереди транспортное средство отсутствует.
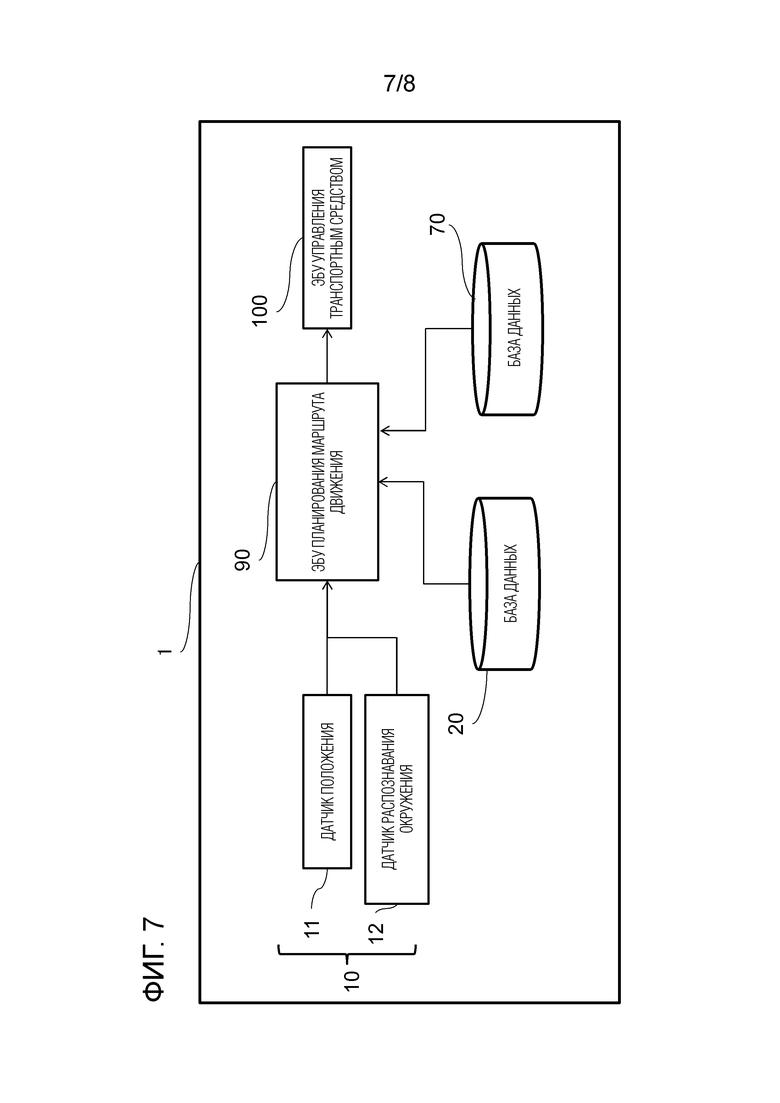
Фиг.7 - это блок-схема транспортного средства в модифицированном примере согласно одному или более вариантам осуществления настоящего изобретения.
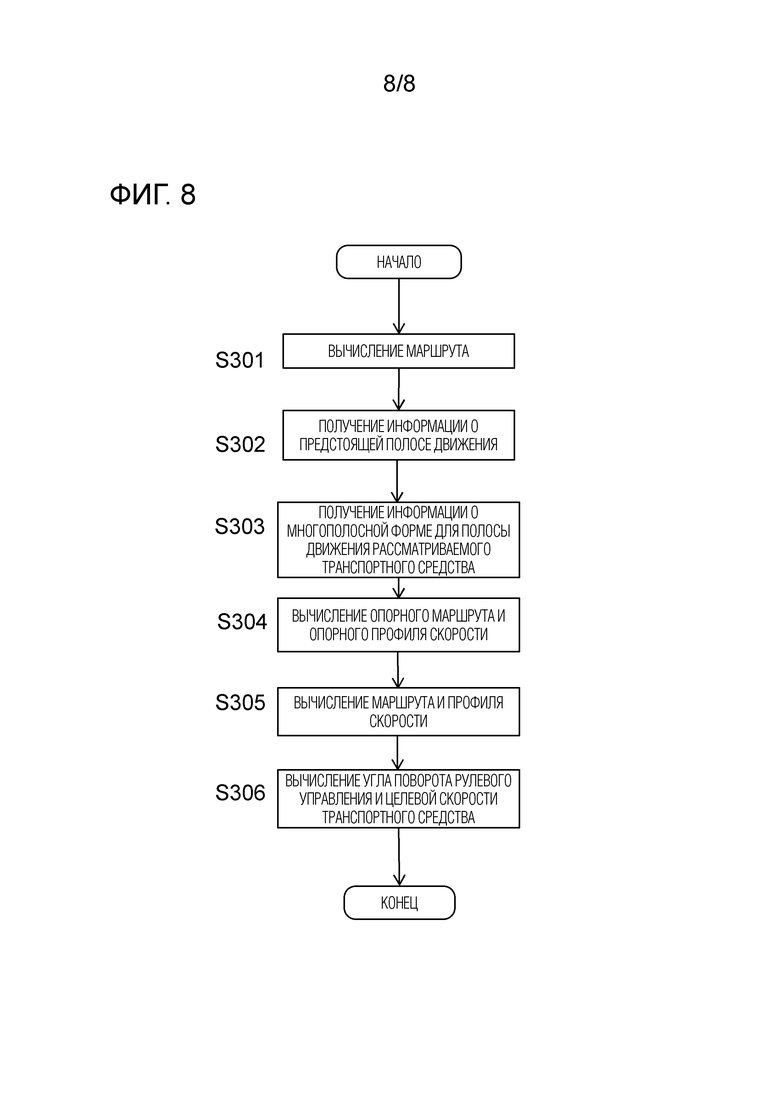
ФИГ. 8 - блок-схема, иллюстрирующая последовательность операций управления в ЭБУ планирования маршрута движения по фиг. 7.
[Осуществление изобретения]
[0009]
Далее будут описаны один или более вариантов осуществления настоящего изобретения с обращением к чертежам.
«Первый вариант осуществления»
[0010]
Один или более вариантов осуществления настоящего изобретения будут описаны ниже с обращением к чертежам. Варианты осуществления будут описаны посредством примера случая, в котором устройство управления информацией о полосах движения в соответствии с настоящим изобретением применяется в системе управления информацией, имеющей транспортное средство и сервер.
[0011]
ФИГ. 1 является схемой, иллюстрирующей конфигурацию блоков системы 1 управления информацией. Система управления информацией о транспортном средстве в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя транспортное средство 1 и сервер 2. Транспортное средство 1 включает в себя набор 10 датчиков, базу 20 данных, контроллер 30 и бортовой модуль 40 связи.
[0012]
Набор 10 датчиков включает в себя, например, датчик 11 положения и датчик 12 распознавания окружения. Набор датчиков определяет положение рассматриваемого транспортного средства, состояние движения рассматриваемого транспортного средства и ситуацию вокруг рассматриваемого транспортного средства. Датчик 11 положения и датчик 12 распознавания окружения являются лишь примером набора датчиков, и могут также использоваться другие датчики при условии, что они могут обнаруживать информацию о положении транспортного средства и наличие или отсутствие окружающего транспортного средства.
[0013]
Датчик 11 положения является датчиком, который определяет текущее положение транспортного средства, и этот датчик адаптирован, например, к Глобальной системе определения местоположения (GPS)/Инерциальной навигационной системе (INS). GPS - это система, которая измеряет положение рассматриваемого транспортного средства, используя информацию, передаваемую со спутников. INS использует гироскопический датчик или датчик ускорения для измерения относительного положения от начального состояния (исходного положения) транспортного средства. Устройство GPS/INS - это устройство, которое измеряет текущее положение транспортного средства с высокой степенью точности путём дополнения информации об абсолютном положении, измеренной GPS, информацией об относительном положении, полученной посредством INS. В одном или более вариантах осуществления настоящего изобретения предполагается, что в дополнение к определению многополосной формы, при которой в одной полосе движения сформированы два или более рядов транспортных средств (то есть, определение состояния множества рядов), информация о маршруте для полосы в многополосной форме используется для автономного (автоматизированного) управления движением, как будет описано ниже. Для этих целей точность определения положения датчиком 11 положения предпочтительно является относительно высокой точностью, составляющей около нескольких десятков сантиметров.
[0014]
В качестве другой конфигурации, датчик 11 положения может представлять собой всенаправленный датчик измерения расстояния. Когда в качестве датчика 11 положения используется всенаправленный датчик измерения расстояния, положение транспортного средства может быть вычислено, например, путем сопоставления с картой. В качестве дополнения или альтернативы, в качестве датчика положения может использоваться камера, и положение транспортного средства может быть вычислено с использованием изображения, полученного камерой. В нижеследующем описании будет описан пример, в котором в качестве датчика 11 положения используется устройство GPS/INS.
[0015]
Датчик 12 распознавания окружения включает в себя, например, лазерные сканеры, прикрепленные рядом с передним бампером и задним бампером транспортного средства, и лазерные сканеры обнаруживают положение и тип объекта, расположенного перед транспортным средством, и положение и тип объекта, расположенного за транспортным средством. Тип объекта указывает, является ли объект транспортным средством. Датчик 12 распознавания окружения может включать в себя другие датчики, отличные от лазерных сканеров, при условии, что они могут обнаруживать положение и тип объекта вокруг транспортного средства.
[0016]
База 20 данных является устройством, которое хранит по меньшей мере информацию карты дорог. База 20 данных является устройством, к которому может осуществлять доступ контроллер 30, и позволяет перезаписывать или обрабатывать информацию надлежащим образом. Дорожная информация включает в себя точную информацию о положении границ дороги и линий остановки для каждой полосы движения, и является картографической информацией с высоким разрешением, подходящей для автономного управления. Каждой полосе движения, представленной информацией карты дорог, присваивается уникальный идентификатор. Когда информация о полосах движения добавляется или обновляется, идентификатор можно использовать для указания полосы движения.
[0017]
Информация карты дорог, записанная в базе 20 данных, может быть простой картографической информацией, такой как навигационная карта, но для использования картографической информации при автономном управлении предпочтительно использовать высокоточную карту. В нижеследующем описании предполагается, что картографическая информация, записанная в базе 20 данных, представляет собой высокоточную карту.
[0018]
Контроллер 30 представляет собой процессор, имеющий функцию управления информацией о транспортном средстве и информацией о карте дорог, которые необходимы в процессе, выполняемом на сервере 2 для определения многополосной формы. Контроллер 30 включает в себя постоянное запоминающее устройство (ПЗУ), в котором хранится программа для выполнения процесса управления информацией, центральный процессор (ЦП), который выполняет программу, хранящуюся в ПЗУ, таким образом, чтобы служить частью устройства управления информацией о полосах движения, и оперативное запоминающее устройство (ОЗУ), которое служит в качестве запоминающего устройства с возможностью осуществления доступа. Контроллер 30 состоит из аппаратных средств, таких как ASIC или FPGA, и имеет блок 31 распознавания положения рассматриваемого транспортного средства, блок 32 распознавания окружающих транспортных средств и блок 33 вычисления информации о движении в качестве функциональных блоков для управления информацией. Подробности этих функциональных блоков будут описаны ниже. Контроллер 30 получает значения обнаружения из набора 10 датчиков, осуществляет доступ к базе 20 данных для вычисления информации о движении транспортного средства и выводит результат вычисления в бортовой модуль 40 связи.
[0019]
Бортовой модуль 40 связи представляет собой модуль для передачи информации о движении, сохраненной в транспортном средстве, на сервер 2, который имеется в удаленном местоположении. Бортовой модуль 40 связи включает в себя бортовое устройство, имеющее, например, функцию мобильной связи 4G LTE, и соединён с контроллером 30 через CAN. Бортовой модуль 40 связи передает сигналы, принятые от контроллера 30, на сервер 2 по линии мобильной связи по мере необходимости. Бортовой модуль 40 связи может быть бортовым устройством, имеющим функцию связи Wi-Fi, и может хранить информацию, переданную от контроллера 30, на жестком диске (HDD) во время движения транспортного средства и передавать информацию, сохранённую на HDD, на сервер 2 в момент, когда устанавливается соединение Wi-Fi.
[0020]
Далее будет описана конфигурация сервера 2. Сервер 2 включает в себя базу 50 данных и контроллер 60. Сервер 2, который состоит из одного или более компьютеров, принимает сигналы, передаваемые от множества транспортных средств, и выполняет обработку информации. Описание конкретной структуры сервера не будет приведено, но в качестве сервера 2 может использоваться обычно используемая серверная система.
[0021]
База 50 данных информации о движении является базой данных, которая хранит информацию о движении, отправляемую из бортового модуля 40 связи. В одном или более вариантах осуществления настоящего изобретения имеется множество транспортных средств, которые могут собирать данные, и вся информация от множества транспортных средств собирается в базе 50 данных. Контроллер 60 представляет собой процессор, имеющий функцию определения многополосной формы для определения того, находится ли полоса движения, соединённая с перекрестком, в состоянии множества рядов, и функцию вычисления для вычисления опорной информации о движении. Контроллер 60 включает в себя ПЗУ, в котором хранятся программы для выполнения различных функций, ЦП, ОЗУ и другие необходимые компоненты. Контроллер 60, который представляет собой аппаратное средство для выполнения упомянутых программ, включает в себя блок 61 определения многополосной формы и блок 62 вычисления опорной информации о движении в качестве функциональных блоков. Подробности этих функциональных блоков будут описаны позже. База 50 данных хранит информацию о полосах движения и информацию о движении. Информация о полосах движения и информация о движении связаны друг с другом посредством идентификатора полосы движения. Контроллер 60 может указывать полосу движения, для которой должно быть выполнено определение многополосной формы, с использованием идентификатора полосы движения, и извлекать информацию, которой присвоен идентификатор полосы движения. Контроллер 60 определяет, имеет ли полоса движения многополосную форму, на основании множества извлеченных элементов информации о движении. Способ определения многополосной формы будет описан ниже. При записи результата определения многополосной формы в базе 50 данных контроллер 60 использует идентификатор транспортного средства для указания информации, которая должна быть записана или перезаписана.
[0022]
Здесь многополосная форма будет описана со ссылкой на фиг. 2. Фиг.2 - принципиальная схема для описания дорожной ситуации, в которой полоса движения имеет многополосную форму . Обычно картографические данные, записанные в навигационном устройстве, и картографические данные, используемые для автономного управления, создаются исходя из предположения, что транспортные средства движутся в соответствии с правилами дорожного движения, которые установлены заранее. В связи с этим, например, на однополосной дороге не предполагается, что транспортные средства движутся с образованием множества рядов, а при автономном управлении транспортные средства движутся в соответствии с правилами (информацией), предусмотренными в данных карты. Однако в реальной дорожной ситуации даже если полоса, соединенная с перекрестком, физически является одной полосой движения, если ширина полосы движения у этой одной полосы движения велика, то в зависимости от того, поворачивает ли транспортное средство направо или движется прямо вперед, имеет место определенное состояние, в котором два или более транспортных средства движутся, образуя два ряда, то есть состояние, в котором одна полоса движения фактически имеет двухполосную форму. Такое явление встречается перед перекрёстком. Как показано на фиг. 2, на японской дороге с одной полосой движения на одной стороне, например, когда ширина полосы движения (ширина дороги) велика, поворачивающее направо транспортное средство A выполняет остановку при наличии с левой стороны пространства для следующего транспортного средства, а движущееся прямо транспортное средство B или поворачивающее налево транспортное средство проходит с левой стороны от поворачивающего направо транспортного средства A. Такая дорожная ситуация часто встречается в повседневной жизни и представляет собой так называемое местное правило. Если автономное управление предполагается в состоянии, в котором картографические данные не включают в себя информацию о многополосной форме, устройству управления автономным управлением трудно распознать дорожную ситуацию по результату обнаружения датчика вблизи перекрестка. Устройство управления информацией о полосах движения в соответствии с одним или более вариантами осуществления настоящего изобретения определяет, находится ли полоса движения, соединенная с перекрестком, в многополосном состоянии нескольких линий, в котором в одной полосе движения сформированы два или более рядов транспортных средств (т.е. находится ли одна полоса движения фактически в многополосной форме), и управляет информацией о полосах движения, включая результат определения состояния множества рядов в информации о полосах движения.
[0023]
Ниже будут описаны функции контроллера 30.
Блок 31 распознавания положения рассматриваемого транспортного средства распознает положение рассматриваемого транспортного средства на основании информации, обнаруженной датчиком 11 положения. Если датчик 11 положения является устройством GPS/INS, информация о положении, которая вводится датчиком 11 положения, может использоваться в качестве текущего положения рассматриваемого транспортного средства. Если датчик 11 положения является всенаправленным датчиком измерения расстояния, блок 31 распознавания положения рассматриваемого транспортного средства получает картографическую информацию из базы 20 данных и вычисляет относительное положение транспортного средства на карте (сопоставление с картой). Способы сопоставления с картой не ограничены конкретно, и может быть использована широко известная общая схема. Положение транспортного средства, подходящее для определения многополосной формы, является относительным положением на карте, и сопоставление с картой, таким образом, является предпочтительным в том смысле, что положение транспортного средства на карте может быть непосредственно вычислено. Однако, если даже при использовании в качестве датчика 11 положения устройства GPS/INS точность картографической информации является высокой, а ошибка относительно абсолютного положения достаточно мала, может использоваться устройство GPS/INS.
[0024]
Блок 32 распознавания окружающих транспортных средств распознает каждое из движущегося впереди транспортного средства и движущегося сзади транспортного средства на основании информации обнаружения, обнаруженной датчиком 12 распознавания окружения, и картографической информации , записанной в базе 20 данных. Информация обнаружения от датчика 12 распознавания окружения включает в себя информацию об объектах для объекта, расположенного перед транспортным средством, и информацию об объектах для объекта, расположенного за транспортным средством. Информация об объектах включает в себя информацию о положении объектов, информацию о типах для различения транспортных средств, пешеходов, велосипедов и нераспознаваемых объектов, и другую подобную информацию. Положение объекта, обнаруженного датчиком 12 распознавания окружения, представлено относительным положением по отношению к рассматриваемому транспортному средству. Блок 32 распознавания окружающих транспортных средств преобразует координаты положения объекта в систему координат карты, используя информацию о положении рассматриваемого транспортного средства, распознаваемую блоком 31 распознавания положения рассматриваемого транспортного средства. Преобразование координат может быть выполнено по общепринятой схеме исходя из предположения о плоскости. Датчик 12 распознавания окружения сверяет положение объекта с картографической информацией, хранящейся в базе 20 данных, и таким образом вычисляет, в какой полосе движения находится объект или находится ли объект вне полосы движения рассматриваемого транспортного средства. Кроме того, датчик 12 распознавания окружения распознает из информации о типе, включенной в информацию обнаружения от датчика 12 распознавания окружения, является ли объект, находящийся в окружении рассматриваемого транспортного средства, транспортным средством.
[0025]
При условии, что распознанный объект является транспортным средством (другим транспортным средством), когда другое транспортное средство находится впереди рассматриваемого транспортного средства на той же полосе движения, что и рассматриваемое транспортное средство, и расстояние между рассматриваемым транспортным средством и другим транспортным средством составляет не более чем определенное расстояние, блок 32 распознавания окружающих транспортных средств определяет, что имеется движущееся впереди транспортное средство. Блок 32 распознавания окружающих транспортных средств устанавливает определенное расстояние в соответствии со скоростью транспортного средства, как в обычно используемой схеме распознавания движущихся впереди транспортных средств при движении за движущимся впереди транспортным средством. Например, когда скорость транспортного средства у рассматриваемого транспортного средства составляет 100 км/ч, блок 32 распознавания окружающих транспортных средств устанавливает упомянутое определенное расстояние равным 100 м. В качестве дополнения или альтернативы, когда скорость транспортного средства у рассматриваемого транспортного средства составляет 20 км/ч, блок 32 распознавания окружающих транспортных средств устанавливает упомянутое определенное расстояние равным 20 м. Также для другого транспортного средства, движущегося позади рассматриваемого транспортного средства, когда другое транспортное средство расположено позади рассматриваемого транспортного средства на той же полосе движения, что и рассматриваемое транспортное средство, и расстояние между рассматриваемым транспортным средством и другим транспортным средством составляет не более определенного расстояния, блок 32 распознавания окружающих транспортных средств определяет, что имеется движущееся сзади транспортное средство.
[0026]
Когда определено, что имеется движущееся впереди транспортное средство, блок 32 распознавания окружающих транспортных средств выполняет отслеживание для вычисления траектории движения. Отслеживание может выполняться по общеизвестной схеме, и положение другого транспортного средства (относительное положение по отношению к рассматриваемому транспортному средству) может вычисляться периодически. Блок 32 распознавания окружающих транспортных средств передает информацию о наличии или отсутствии движущегося впереди транспортного средства, информацию о наличии или отсутствии движущегося сзади транспортного средства и информацию о траектории движения движущегося впереди транспортного средства в блок 33 вычисления информации о движении.
[0027]
Блок 33 вычисления информации о движении вычисляет информацию о движении как информацию, необходимую на сервере 2 для определения многополосной формы . Блок 33 вычисления информации о движении передает вычисленную информацию о движении в бортовой модуль 40 связи. Бортовой модуль 40 связи передает информацию о движении на сервер 2. Информация о движении включает в себя информацию о пути движения в полосе движения для полосы движения, соединенной с перекрестком. Информация о движении включает в себя следующие элементы информации в дополнение к информации о пути движения. Следует отметить, что не все элементы информации, приведенные ниже в качестве примера, являются необходимыми.
[0028]
(Информация о боковом направлении транспортного средства)
Блок 33 вычисления информации о движении вычисляет боковое положение другого транспортного средства, когда другое транспортное средство въезжает на перекресток, на основании траектории движения движущегося впереди транспортного средства. В качестве дополнения или альтернативы, блок 33 вычисления информации о движении вычисляет боковое положение рассматриваемого транспортного средства, когда рассматриваемое транспортное средство въезжает на перекресток, на основании траектории движения рассматриваемого транспортного средства. Поперечное направление транспортного средства относится к направлению, перпендикулярному направлению движения транспортного средства. Блок 33 вычисления информации о движении включает вычисленную информацию о положении в боковом направлении рассматриваемого транспортного средства и вычисленную информацию о положении в боковом направлении другого транспортного средства в информацию о движении и передает информацию о движении в бортовой модуль 40 связи.
[0029]
(Информация о направлении движения)
Блок 33 вычисления информации о движении вычисляет информацию о направлении движения, которая представляет, движется ли движущееся впереди транспортное средство прямо вперед, поворачивает ли направо и поворачивает ли налево после въезда на перекресток, на основании траектории движения движущегося впереди транспортного средства. Блок 33 вычисления информации о движении также вычисляет информацию о направлении движения рассматриваемого транспортного средства на основании траектории движения рассматриваемого транспортного средства. Информация о направлении движения представлена идентификатором полосы движения после проезда транспортного средства через перекресток. Сервер 2 может указывать направление движения транспортного средства из соотношения между идентификатором полосы движения, когда транспортное средство входит в перекресток, и идентификатором полосы движения для полосы движения, по которой транспортное средство движется после въезда на перекресток. Блок 33 вычисления информации о движении включает информацию о направлении движения рассматриваемого транспортного средства и другого транспортного средства в информацию о движении и передает информацию о путешествии на бортовой модуль 40 связи.
[0030]
(Информация о транспортном средстве)
Блок 33 вычисления информации о движении вычисляет информацию о транспортном средстве, относящуюся к поведению транспортного средства, такому как скорость транспортного средства, работа акселератора, работа тормоза и работа указателей поворота другого транспортного средства или рассматриваемого транспортного средства. Блок 33 вычисления информации о движении включает информацию о транспортном средстве в информацию о движении и передает информацию о движении в бортовой модуль 40 связи.
[0031]
(Информация о результате определения направления движения)
Блок 33 вычисления информации о движении сравнивает траекторию движения рассматриваемого транспортного средства с траекторией движения другого транспортного средства до и после въезда на перекресток и таким образом определяет, имеется ли движущееся впереди транспортное средство, которое двигалось в другом направлении движения, отличном от направления движения рассматриваемого транспортного средства. Блок 33 вычисления информации о движении включает результат определения в информацию о движении и передает информацию о движении в бортовой модуль 40 связи. В дополнение к результату определения, информация о движении может включать в себя информацию об идентификаторе полосы движения для полосы движения, по которой движущееся впереди транспортное средство, для которого должно быть выполнено определение, двигалось после выезда с перекрестка.
[0032]
(Информация о движущемся сзади транспортном средстве)
Получая информацию, которая представляет результат распознавания движущегося сзади транспортного средства, из блока 32 распознавания окружающих транспортных средств, блок 33 вычисления информации о движении включает в себя информацию о том, имеется ли за рассматриваемым транспортным средством движущееся сзади транспортное средство, в информацию о движении и передает информацию о движении на бортовой модуль 40 связи.
[0033]
Далее с обращением к фиг. 3 будет описана последовательность операций управления в блоке 33 вычисления информации о движении.
На этапе S1 блок 33 вычисления информации о движении получает информацию о положении рассматриваемого транспортного средства из блока 31 распознавания положения рассматриваемого транспортного средства и выполняет сопоставление информации о положении рассматриваемого транспортного средства с картографической базой данных для вычисления положения в полосе движения, при этом указывая идентификатор полосы движения в качестве информации о полосе движения рассматриваемого транспортного средства.
[0034]
На этапе S2 блок 33 вычисления информации о движении определяет, вошло ли рассматриваемое транспортное средство в полосу движения перед перекрестком, на основании информации о полосе движения и информации о положении рассматриваемого транспортного средства. Блок 33 вычисления информации о движении выполняет определение въезда в область перекрёстка с использованием идентификатора транспортного средства, записанного для каждой полосы движения в картографической базе 20 данных. Другая схема может включать в себя запись положения центра перекрёстка в картографической базе 20 данных заранее, и когда расстояние между положением центра и положением рассматриваемого транспортного средства не превышает определенное значение, определение того, что рассматриваемое транспортное средство вошло в полосу движения перед перекрёстком.
[0035]
Если определено, что рассматриваемое транспортное средство вошло в полосу движения перед перекрестком, блок 33 вычисления информации о движении выполняет последовательность операций управления на этапе S3. Если определено, что транспортное средство не вошло в полосу движения перед перекрестком, блок 33 вычисления информации о движении выполняет последовательность операций управления на этапе S1.
[0036]
На этапе S3 блок 33 вычисления информации о движении записывает информацию о полосе движения перед перекрёстком в базе 20 данных в качестве информации о движении. Информация о движении, записанная на этапе S3, не ограничена информацией о положении на полосе движения и может включать в себя различные элементы информации о транспортном средстве, такие как скорость транспортного средства, работа акселератора/тормоза и работа указателей поворота.
[0037]
На этапе S4 блок 33 вычисления информации о движении определяет, вошло ли рассматриваемое транспортное средство в область перекрёстка, через полосу движения перед перекрёстком. Если рассматриваемое транспортное средство въехало на перекресток, блок 33 вычисления информации о движении выполняет последовательность операций управления на этапе S11. Если рассматриваемое транспортное средство не въехало на перекресток, блок 33 вычисления информации о движении выполняет последовательность операций управления на этапе S5. Тот же самый способ в процессе определения на этапе S2 может использоваться и в качестве процесса определения в последовательности операций управления на этапе S4.
[0038]
На этапе S6, используя функцию отслеживания движущихся впереди транспортных средств блока 32 распознавания окружающих транспортных средств, блок 33 вычисления информации о движении выполняет отслеживание движущегося впереди транспортного средства, в то время как рассматриваемое транспортное средство движется в полосе движения перед перекрестком. На этапе S7 на основании результата отслеживания блок 33 вычисления информации о движении определяет, прошло ли рассматриваемое транспортное средство движущееся впереди транспортное средство, в то время как рассматриваемое транспортное средство движется по полосе движения перед перекрестком. Если рассматриваемое транспортное средство прошло движущееся впереди транспортное средство, выполняется последовательность операций управления этапа S8. Если рассматриваемое транспортное средство не прошло движущееся впереди транспортное средство, выполняется последовательность операций управления на этапе S9. Тот факт, что рассматриваемое транспортное средство прошло движущееся впереди транспортное средство, означает, что полоса движения, в которой движется рассматриваемое транспортное средство, имеет многополосную форму, поэтому результат определения этапа S7 можно использовать в качестве критерия для определения того, что полоса движения имеет многополосную форму.
[0039]
На этапе S8 блок 33 вычисления информации о движении записывает в базу 20 данных информацию о движении в отношении того, что имеется движущееся впереди транспортное средство, которое движется в другом направлении. Информация о движении в отношении движущегося впереди транспортного средства включает в себя информацию о результатах определения траектории движения и направления движения движущегося впереди транспортного средства или информацию о транспортном средстве в отношении движущегося впереди транспортного средства и другую подобную информацию.
[0040]
На этапе S9 блок 33 вычисления информации о движении получает результат распознавания движущегося сзади транспортного средства из блока 32 распознавания окружающих транспортных средств и определяет, имеется ли движущееся сзади транспортное средство, на основании результата распознавания движущегося сзади транспортного средства. Если имеется движущееся сзади транспортное средство, выполняется управление на этапе S10. Если нет движущегося сзади транспортного средства, процесс возвращается к этапу S4.
[0041]
На этапе S10 блок 33 вычисления информации о движении записывает в базу 20 данных информацию о движении, которая представляет присутствие движущегося сзади транспортного средства.
[0042]
На этапе S11 блок 33 вычисления информации о движении записывает в базу 20 данных боковое положение рассматриваемого транспортного средства в полосе движения при входе в область перекрёстка (то есть при выходе из полосы движения перед перекрёстком).
[0043]
На этапе S12 блок 33 вычисления информации о движении определяет, прошло ли рассматриваемое транспортное средство через область перекрёстка. Когда рассматриваемое транспортное средство прошло через область перекрёстка, блок 33 вычисления информации о движении выполняет процесс управления на этапе S13. Если рассматриваемое транспортное средство не прошло через область перекрёстка, блок 33 вычисления информации о движении выполняет процесс управления на этапе S11. Тот же самый способ, что и в процессе определения на этапе S2, может использоваться в качестве процесса определения в последовательности операций управления на этапе S12.
[0044]
На этапе S13 блок 33 вычисления информации о движении сверяет информацию о положении рассматриваемого транспортного средства после того, как рассматриваемое транспортное средство покинуло область перекрёстка, с картографической информацией, для указания идентификатора полосы движения, по которой рассматриваемое транспортное средство движется после выхода из области перекрёстка, и записывает идентификатор полосы движения в базу 20 данных. Идентификатор полосы движения используется для записи направления движения, но перекресток может быть не только Т-образным перекрестком или пересечением дорог, но и сложным, например, перекрестком пяти дорог. Возможно реагирование на перекресток любой формы путём использования идентификатора полосы движения, по которой транспортное средство движется после проезда перекрестка, вместо использования абстрактной информации, такой как движение прямо вперед, поворот направо или поворот налево.
[0045]
На этапе S14 блок 33 вычисления информации о движении собирает различные элементы информации о движении, вычисленные в вышеупомянутом процессе управления, связывает их с идентификатором полосы движения перед перекрёстком и затем передает их в бортовой модуль 40 связи, таким образом завершая процесс управления.
[0046]
Ниже будут описаны функции контроллера 60.
Блок 61 определения многополосной формы извлекает релевантную информацию о движении на основании идентификатора полосы движения для полосы движения, которую необходимо определить, и определяет многополосную форму на основании извлеченной информации о движении. Определение многополосной формы выполняется способом, описанным ниже. Может быть использован любой из нижеследующих способов определения, или результаты определения могут быть объединены.
[0047]
(Кластеризация траекторий движения)
Траектория движения транспортного средства выражается набором положений транспортного средства (x, y). Сначала блок 61 определения многополосной формы извлекает информацию о движении для полосы движения, в отношении которой должно выполнено определение многополосной формы, из базы 50 данных на основании идентификатора полосы движения для полосы движения, и выделяет из траектории движения частичную траекторию от при входа на полосу движения до выхода из полосы движения. Затем блок 61 определения многополосной формы выравнивает количество точек на траектории с количеством точек на другой траектории таким образом, чтобы траектории транспортных средств могли быть с легкостью сравнены друг с другом.
[0048]
Фиг. 4 представляет собой принципиальную схему процесса выравнивания количества точек на траектории. Как показано на фиг. 4, траектория движения транспортного средства представлена облаком точек в полосе движения. Например, после того, как облако точек аппроксимировано сплайновой кривой, участок линии может быть разделен на произвольное количество участков для извлечения точек. После выравнивания количества точек блок 61 определения многополосной формы выполняет кластеризацию по общеизвестной схеме, такой как кластеризация по среднему значению k, и определяет, разделены ли точки на множество кластеров, используя произвольную пороговую величину. Если точки разделены на множество кластеров, блок 61 определения многополосной формы определяет, что полоса движения имеет многополосную форму.
[0049]
(Кластеризация с боковыми положениями при въезде на перекресток)
Блок 61 определения многополосной формы может использовать другую схему определения многополосной формы с использованием боковых положений при выходе из полосы движения. Фиг.5 представляет собой принципиальную схему, иллюстрирующую пример распределения боковых положений транспортных средств в полосе движения, имеющей многополосную форму. Блок 61 определения многополосной формы извлекает законченную линию полосы движения, для которой следует выполнить определение, из базы 50 данных. Законченная линия извлекается в области, в которой транспортные средства въезжают на перекрёсток. Блок 61 определения многополосной формы вычисляет точки, в которых законченная линия пересекается с соответствующими траекториями движения. Блок 61 определения многополосной формы выполняет кластеризацию по вычисленным точкам пересечения посредством кластеризации с помощью среднего значения k или другой аналогичной схемы. Блок 61 определения многополосной формы определяет, разделены ли точки пересечения на множество кластеров с использованием произвольной пороговой величины (например, равно ли расстояние между кластерами 1 м или более). То есть блок 61 определения многополосной формы указывает один или более наборов боковых положений транспортных средств в пределах области, включающей в себя законченную линию. Затем, если в упомянутой области могут быть указаны два или более наборов положений, блок 61 определения многополосной формы определяет, имеют ли расстояние или расстояния между двумя или более наборами положений заданную длину или более. Затем, если расстояние или расстояния между двумя или более наборами положений не меньше заданной длины, блок 61 определения многополосной формы определяет, что полоса движения, включающая в себя упомянутую область, имеет многополосную форму. Например, в примере по фиг. 5 соответствующие наборы положений формируются с правой стороны и с левой стороны на одной полосе движения в упомянутой области (в области, включающей в себя законченную линию), и если расстояние между наборами положений не меньше длины, соответствующей ширине транспортного средства, блок 61 определения многополосной формы определяет, что полоса движения находится в состоянии многополосной формы.
[0050]
(Классификация в соответствии с направлением движения)
Блок 61 определения многополосной формы может использовать другую схему классификации траекторий движения в соответствии с направлением движения. Блок 61 определения многополосной формы определяет, является ли направление движения одинаковым, на основании идентификатора полосы движения следующей полосы движения, в которую транспортное средство входит после прохождения перекрестка. Блок 61 определения многополосной формы вычисляет среднее боковое положение при выходе из полосы движения для траекторий движения в одном и том же направлении движения и определяет, имеется ли различие в боковом положении между направлениями движения. В частности, например, когда боковые положения при выходе из полосы движения отделены друг от друга определенным расстоянием (например, 1 м) или более, выполняется определение, что полоса в этом направлении движения имеет многополосную форму. То есть, если информация о положении, представляющая боковое направление транспортных средств, может быть классифицирована на набор, который представляет движение прямо вперед, и набор, который представляет поворот направо или налево в области, через которую транспортные средства въезжают на перекресток, блок 61 определения многополосной формы определяет, что полоса движения находится в состоянии многополосной формы.
[0051]
(Классификация в соответствии с наличием или отсутствием движущегося впереди транспортного средства, движущегося в другом направлении)
Блок 61 определения многополосной формы может использовать другую схему классификации траекторий движения в соответствии с наличием или отсутствием движущегося впереди транспортного средства, движущегося в другом направлении. Как описано выше, блок 33 вычисления информации о движении определяет, имеется ли движущееся впереди транспортное средство, которое продвинулось в направлении, отличном от направления движения рассматриваемого транспортного средства, и информация о движении включает в себя информацию о результате определения. Поэтому блок 61 определения многополосной формы вычисляет среднее боковое положение, когда транспортные средства въезжают на перекресток, и определяет, есть ли различие в среднем боковом положении. Способ определения может быть таким же, как описано выше (классификация в соответствии с направлением движения).
[0052]
(Классификация в соответствии с наличием или отсутствием движущегося сзади транспортного средства)
Блок 61 определения многополосной формы может использовать другую схему выполнения классификации в соответствии с наличием или отсутствием движущегося сзади транспортного средства. Затем блок 61 определения многополосной формы определяет, находится ли полоса в состоянии многополосной формы, на основании результата классификации. Конкретная схема может быть такой же, как и для движущегося впереди транспортного средства.
[0053]
Если определено, что полоса находится в состоянии многополосной формы, блок 61 определения многополосной формы перезаписывает в базе 50 данных информацию об участке полосы движения, для которой необходимо выполнить определение, на информацию, которая представляет состояние многополосной формы, тем самым обновляя информацию о полосе движения. В частности, когда полоса движения находится в многополосной форме между движением, например, прямо вперед и поворотом направо, дополнительно записывается полоса движения для правого поворота. Когда информация в базе 50 данных обновляется, сервер 2 может связываться с транспортным средством 1, а также обновлять информацию в базе 20 данных.
[0054]
Блок 62 вычисления опорной информации о движении получает информацию определения в отношении того, находится ли полоса движения в многополосной форме, из блока 61 определения многополосной формы, вычисляет опорную информацию о движении для каждой полосы движения и сохраняет опорную информацию о движении в базе 50 данных в связи с идентификатором полосы движения. Опорная информация о движении является информацией, используемой при автономном управлении, и записывается для каждой отделённой полосы движения под одним и тем же идентификатором полосы движения (для удобства называемой здесь «дополнительной полосой движения»). Информация, включенная в опорную информацию о движении, может включать в себя траекторию движения, а также профиль скорости, степень открытия акселератора, величину управления тормозом и информацию о работе указателей поворота. Траектория движения, подлежащая использованию, может быть средней траекторией (облаком точек местоположений транспортных средств), которая извлекается посредством кластеризации, выполняемой блоком 61 определения многополосной формы. Профиль скорости, степень открытия акселератора, величина управления тормозом и информация о работе указателей поворота могут храниться в связи с каждой точкой на траектории движения. Например, когда траектория движения выражается 20 точками, скорость транспортного средства записывается как 60 км/ч в первой точке, как 58 км/ч во второй точке и так далее. Опорная информация о движении является очень полезной информацией при автономном управлении и, следовательно, может сохраняться и в том случае, когда полоса движения не имеет многополосную форму.
[0055]
Сервер 2 может быть снабжен базой данных, которая хранит информацию о многополосной форме, в дополнение к базе 50 данных. Эта база данных хранит в качестве информации о многополосной формы информацию о том, имеет ли полоса движения многополосную форму, и опорную информацию о движении для каждой полосы движения, таким образом, что эти элементы информации связаны с информацией о полосе движения, включенной в картографическую информацию. Информация, записанная в базе данных, передается в транспортное средство 1 посредством распределения данных или тому подобного и используется в целях помощи при вождении или тому подобного.
[0056]
Как описано выше, один или более вариантов осуществления настоящего изобретения включают в себя получение информации о карте дорог и информации об истории движения, которая представлена траекторией движения на карте дорог, определение путём использования множества историй движения, имеет ли полоса движения, соединенная с перекрестком, многополосную форму, при которой в одной полосе движения сформированы два или более рядов транспортных средств, и управление информацией о полосах движения путём включения результата определения многополосной формы в информацию о полосах движения. Это позволяет управлять информацией о многополосной форме, при которой полоса движения физически представляет собой одну полосу движения, но практически имеет форму двух полос движения (или форму трех полос движения).
[0057]
Один или более вариантов осуществления настоящего изобретения включают в себя вычисление боковых положений транспортных средств в области приближения, через которую транспортные средства въезжают на перекресток, указание набора боковых положений в качестве набора положений, и, если два или более наборов положений, включающих в себя упомянутый набор положений, указаны в области приближения, и расстояние или расстояния между двумя или более наборами положений не меньше заданного значения, определяют, что полоса движения, включающая в себя область приближения, имеет многополосную форму. Это позволяет определять многополосную форму с более высокой степенью точности, чем при кластеризации историй движения в целом по полосе движения. Многополосная форма может возникать внезапно перед въездом на перекресток; поэтому, если маршруты движения кластеризованы по всей области полосы движения, может оказаться невозможным выполнить точное определение, поскольку включены маршруты до возникновения многополосной формы, но в одном или более вариантах осуществления настоящего изобретения точность определения может быть повышена.
[0058]
Один или более вариантов осуществления настоящего изобретения включают в себя указание наборов положений в связи с движением прямо вперед после въезда на перекресток и поворотом направо или налево после въезда на перекресток, и, если наборы положений могут быть классифицированы в области приближения на набор, который представляет движение прямо вперед и набор, который представляет поворот направо или налево, определение, что полоса движения, включающая в себя область приближения, имеет многополосную форму. Это позволяет определять многополосную форму, когда многополосная форма возникает в соответствии с направлением движения.
[0059]
Один или более вариантов осуществления настоящего изобретения включают в себя указание полосы движения, для которой определена многополосная форма, среди полос движения, представленных информацией карты дорог, и перезапись информации об участке указанной полосы движения на информацию, представляющую многополосную форму. Это позволяет перезаписывать информацию о количестве полос движения на информацию, адаптируемую к фактической дорожной ситуации.
[0060]
Один или более вариантов осуществления настоящего изобретения включают в себя вычисление опорной информации о движении, включающей в себя информацию о маршруте движения в полосе движения, на основании множества историй движения, и вычисление опорной информации о движении для каждой из двух или более виртуальных полос движения, включенных в полосу движения, для которой определена многополосная форма. Это позволяет управлять подробной информацией на уровне, который может использоваться при автономном управлении или тому подобном.
[0061]
Один или более вариантов осуществления настоящего изобретения включают в себя указание, с использованием историй движения, маршрута движения другого транспортного средства, движущегося в той же полосе движения, что и полоса движения, соединенная с перекрестком, и определение того, находится ли полоса в многополосной форме, на основании взаимосвязи между направлением движения другого транспортного средства и направлением движения рассматриваемого транспортного средства после въезда на перекресток и наличием или отсутствием движущегося впереди транспортного средства. Фиг. 6 представляет собой набор принципиальных схем, иллюстрирующих траекторию движения рассматриваемого транспортного средства, когда имеется движущееся впереди транспортное средство (транспортное средство, поворачивающее направо), и траекторию движения рассматриваемого транспортного средства, когда движущееся впереди транспортное средство отсутствует. В одном или более вариантах осуществления настоящего изобретения многополосная форма определяется путем различения между случаем, в котором имеется движущееся впереди транспортное средство, которое продвинулось в направлении, отличном от направления движения рассматриваемого транспортного средства, и случаем, в котором нет движущегося впереди транспортного средства, и таким образом многополосная форма может быть надлежащим образом определена, если рассматриваемое транспортное средство C движется по другой траектории, как показано на фиг. 6, в зависимости от того, имеется ли движущееся впереди транспортное средство D. В случае примера на фиг. 6, например, схемы движения классифицируются на три типа: движение прямо с движущимся впереди транспортным средством; движение прямо вперед без движущегося впереди транспортного средства; и поворот направо без движущегося впереди транспортного средства.
[0062]
Один или более вариантов осуществления настоящего изобретения включают в себя указание, с использованием историй движения, маршрута движения движущегося сзади транспортного средства, которое движется по полосе движения, соединенной с перекрестком, и определение того, имеет ли полоса движения многополосную форму, на основании наличия или отсутствия движущегося сзади транспортного средства. Например, в примере по фиг. 6, когда имеется движущееся сзади транспортное средство, поворачивающее направо транспортное средство может двигаться направо, чтобы обеспечить пространство для прохождения движущегося сзади транспортного средства, но когда движущееся сзади транспортное средство отсутствует, поворачивающее направо транспортное средство может находиться в середине полосы движения. В случае такого различия точность определения может быть повышена путем определения многополосной формы с использованием наличия или отсутствия движущегося сзади транспортного средства.
[0063]
Один или более вариантов осуществления настоящего изобретения включают в себя обеспечение пользователю информации о полосах движения, представляющей, что полоса движения имеет многополосную форму. Это может обеспечить надлежащую помощь при вождении для водителя, который не знаком с местными правилами. Кроме того, в случае автономного управления водитель получает повод действовать в режиме автономного управления и тем самым может чувствовать себя в безопасности.
[0064]
Блок 61 определения многополосной формы может выполнять процесс сброса в отношении информации о многополосной форме. В частности, определяется многополосная форма, получается информация о движении за последнее определенное количество раз (например, последние 100 раз или тому подобное) из базы 50 данных для каждой полосы движения, записанной в базе 50 данных, и многополосная форма определяется снова в вышеуказанном процессе. Когда в результате определения полоса не имеет многополосную форму, информация о многополосной форме удаляется из базы 50 данных. В качестве дополнения или альтернативы, если способ определения многополосной формы является другим, может быть дополнительно записана новая информация после однократного удаления информации о многополосной форме. Посредством этой операции, когда тенденция движения изменилась вследствие изменения в конструкции дороги или тому подобном, информацию о многополосной форме можно удалять/редактировать. То есть один или более вариантов осуществления настоящего изобретения включают в себя указание полосы движения, записанной как находящаяся в многополосной форме, среди полос движения, представленных информацией карты дорог, и определение, находится ли полоса движения, записанная в виде информации о многополосной форме, в многополосной форме на основании историй движения за определенный последний период.
[0065]
В модифицированном примере, в соответствии с одним или более вариантами осуществления настоящего изобретения способ управления информацией о полосах движения может включать в себя обеспечение транспортного средства 1 базой данных на стороне сервера 2. Фиг. 7 является блок-схемой транспортного средства согласно модифицированному примеру. Набор 10 датчиков и база 20 данных являются такими же, как и на фиг. 1. Предусмотрена база 70 данных для записи по меньшей мере опорной информации о движении и информации о многополосной форме среди информации, хранящейся в базе данных на стороне сервера 2, и она связана с картографической информацией, записанной в базе 20 данных, посредством идентификатора полосы движения.
[0066]
Предусмотрен ЭБУ 90 для планирования маршрута движения, который представляет собой контроллер, в полной мере управляющий автономным управлением транспортным средством 1. Например, ЭБУ 90 планирования маршрута движения выполнен с возможностью включать в себя программу, которая работает с использованием микрокомпьютера и памяти. На основании информации от датчиков из набора 10 датчиков и информации, хранящейся в базе 20 данных и базе 70 данных, угол поворота рулевого управления и целевое значение скорости транспортного средства для выполнения автономного управления вычисляются и отправляются в ЭБУ 100 управления транспортным средством. Это вычисление основано на последовательности операций процесса, который будет описан ниже.
[0067]
ЭБУ 100 управления транспортным средством выполнен с возможностью включать в себя программу, которая работает с использованием микрокомпьютера и памяти, как и в ЭБУ 90 планирования маршрута движения. ЭБУ 100 управления транспортным средством принимает целевую скорость транспортного средства и угол поворота рулевого управления транспортного средства из ЭБУ 90 планирования маршрута движения и выполняет управление движением транспортного средства во взаимодействии с ЭБУ управления двигателем (не показан), ЭБУ управления мотором рулевого управления (не показан) и т.д.
[0068]
Далее с обращением к фиг. 8 будет описана последовательность операций процесса в ЭБУ 90 планирования маршрута движения.
На этапе S301 ЭБУ 90 планирования маршрута движения получает информацию о пункте назначения от водителя или тому подобного, получает информацию о положении транспортного средства от датчика 11 положения и вычисляет маршрут до пункта назначения с использованием картографической базы 20 данных . Процесс управления на этапе S301 использует так называемую навигационную функцию, но картографическая база 20 данных включает в себя высокоточную карту для автономного управления, поэтому вычисление маршрута выполняется на уровне полосы движения в отношении того, какую полосу движения следует выбрать.
[0069]
На этапе S302, используя текущую информацию о положении и самую последнюю информацию о маршруте, ECU 90 планирования маршрута движения получает из базы 20 данных информацию о предстоящей полосе движения, по которой рассматриваемое транспортное средство будет двигаться с этого момента.
[0070]
На этапе S303 ЭБУ 90 планирования маршрута движения получает из базы 70 данных информацию о многополосной форме для предстоящей полосы движения, по которой рассматриваемое транспортное средство будет двигаться с этого момента.
[0071]
На этапе S304 ЭБУ 90 планирования маршрута движения получает информацию о маршруте и профиль скорости, которые включены в опорную информацию о движении, из базы 70 данных. База 70 данных, предполагаемая в модифицированном примере, включает в себя информацию о левой и правой границах и об осевой линии полосы движения, и об ограничении скорости транспортного средства в полосе движения в качестве информации о полосе движения.
[0072]
Если информация о многополосной форме не записана, осевая линия и ограничение скорости транспортного средства могут быть использованы в качестве опорного маршрута и профиля скорости, соответственно. Если информация о многополосной форме записана, способ использования информации о многополосной форме различается в зависимости от способа разделения полос движения. Если многополосная форма определена в соответствии с направлением движения, может использоваться опорная информация о дополнительной полосе движения, которая имеется в направлении движения рассматриваемого транспортного средства. Если многополосная форма определена в соответствии с наличием или отсутствием движущегося впереди транспортного средства или движущегося сзади транспортного средства, присутствие или отсутствие движущегося впереди транспортного средства или движущегося сзади транспортного средства определяется на основании информации от датчика 12 распознавания окружения, и затем может использоваться опорная информация о дополнительной полосе движения, которая соответствует ситуации с рассматриваемым транспортным средством.
[0073]
На этапе S305, на основании опорного маршрута и опорного профиля скорости, полученных в процессе управления на этапе S304, ECU 90 планирования маршрута движения вычисляет окончательный маршрут движения и профили скорости (последовательность значений целевой скорости в положениях на маршруте движения), которым должно следовать транспортное средство, с учетом окружающей ситуации, вычисленной на основании датчика 12 распознавания окружения, и т.д. Расчет пути перемещения основан на методике, называемой планированием пути, и может использоваться общеизвестная схема реализации.
[0074]
На этапе S306 на основании маршрута движения и профиля скорости, вычисленных в процессе управления на этапе S305, ЭБУ 90 планирования маршрута движения вычисляет целевую скорость транспортного средства и угол поворота рулевого колеса и отправляет их в ЭБУ 100 управления транспортным средством. Это так называемое маршруту, и может быть использована обычно используемая схема реализации.
[0075]
В способе управления движением транспортного средства в соответствии с модифицированным примером автономное управление выполняется на основании опорной информации о движении, и поэтому возможна реализация соответствующего поведения при управлении, соответствующего местным правилам.
[0076]
Пример, в котором база 70 данных используется для помощи при вождении, будет описан как еще один модифицированный пример в соответствии с одним или более вариантами осуществления настоящего изобретения. Хотя конфигурация в основном такой же, как и на фиг. 7, ЭБУ 100 управления транспортным средством имеет функцию представления информации водителю.
[0077]
Устройство, которое обеспечивает информацию пользователю, представляет собой, например, дисплей, установленный в центре приборной панели транспортного средства. ЭБУ 100 управления транспортным средством принимает информацию об опорном маршруте движения, адаптированную к ситуации с рассматриваемым транспортным средством, из ЭБУ 90 планирования маршрута движения и работает, например, для отображения опорного маршрута движения, например, путем его наложения на изображение с передней камеры. Устройство, которое обеспечивает информацию пользователю, также может быть громкоговорителем, и при входе в полосу движения в многополосной форме водитель может быть проинформирован посредством голосового или звукового сигнала о том, что полоса движения находится на дороге, на которой полоса движения часто имеет многополосную форму.
[Описание ссылочных позиций]
[0078]
1 Транспортное средство
2 Сервер
10 Набор датчиков
20, 50 База данных
40 Бортовой модуль связи
60 Контроллер
Изобретение относится к способу управления информацией о полосах движения, способу управления движением и устройству управления информацией о полосах движения. Способ управления информацией о полосах движения содержит этапы, на которых получают информацию о карте дорог и информацию об истории движения, определяют с использованием множества историй движения, образуют ли два или более транспортных средств в полосе движения разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения, и управляют информацией о полосах движения. Способ управления движением транспортного средства содержит этапы, на которых определяют, имеется ли другое транспортное средство в окружении рассматриваемого транспортного средства, и управляют движением рассматриваемого транспортного средства на основании результата определения в отношении другого транспортного средства и опорной информации о движении. Устройство управления информацией о полосах движения содержит базу данных и процессор, причем база данных записывает информацию о карте дорог и информацию об истории движения. Причем процессор работает для получения информации о карте дорог и информации об истории движения из базы данных. Достигается повышение безопасности. 5 н. и 8 з.п. ф-лы, 8 ил.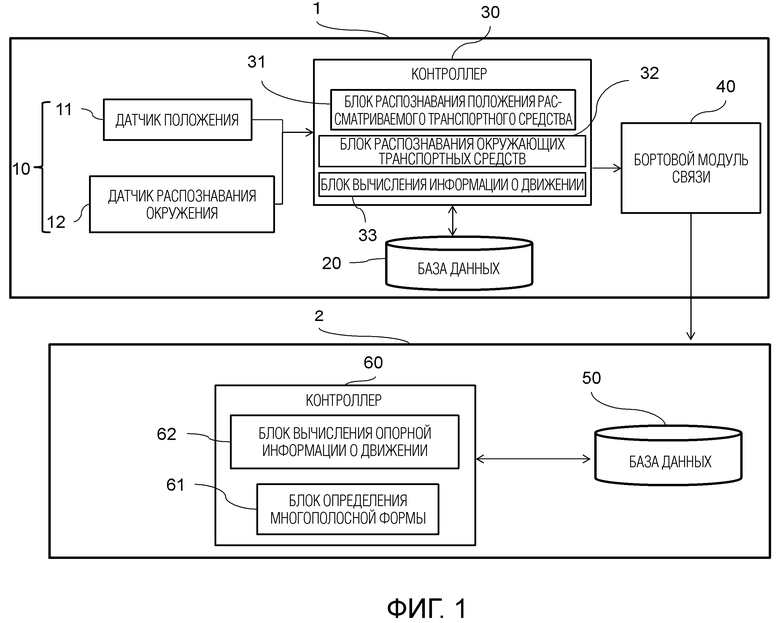
1. Способ управления информацией о полосах движения для управления информацией о полосах движения с использованием процессора, содержащий этапы, на которых:
получают информацию о карте дорог и информацию об истории движения, представленную траекторией движения на карте дорог;
определяют с использованием множества историй движения, образуют ли два или более транспортных средств в полосе движения, соединенной с перекрестком, разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения; и
управляют информацией о полосах движения, включая результат определения многополосной формы в информацию о полосах движения.
2. Способ управления информацией о полосах движения по п. 1, содержащий этапы, на которых:
вычисляют боковые положения транспортных средств в области приближения, через которую транспортные средства въезжают на перекресток;
указывают набор боковых положений в качестве набора положений; и
если два или более наборов положений, включающих в себя упомянутый набор положений, указаны в области приближения и расстояние или расстояния между двумя или более наборами положений не меньше заданного значения, определяют, что два или более транспортных средств в полосе движения, включающей в себя область приближения, образуют разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения.
3. Способ управления информацией о полосах движения по п. 2, содержащий этапы, на которых:
указывают наборы положений в связи с движением прямо вперед после въезда на перекресток и с поворотом направо или налево после въезда на перекресток; и
если наборы положений могут быть классифицированы в области приближения на набор, представляющий движение прямо вперед, и набор, представляющий поворот направо или налево, определяют, что два или более транспортных средств в полосе движения, включающей в себя область приближения, образуют разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения.
4. Способ управления информацией о полосах движения по любому из пп. 1-3, содержащий этапы, на которых:
указывают полосу движения, определенную как имеющую многополосную форму, среди полос движения, представленных информацией о карте дорог; и
перезаписывают информацию об участке указанной полосы движения на информацию, представляющую, что два или более транспортных средств образуют разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения.
5. Способ управления информацией о полосах движения по любому из пп. 1-4, содержащий этапы, на которых:
вычисляют опорную информацию о движении на основании множества историй движения, причем опорная информация о движении включает в себя информацию о маршруте движения в полосе движения; и
вычисляют опорную информацию о движении для каждой из двух или более виртуальных полос движения, включенных в полосу движения, для которой определено, что она является полосой движения, в которой два или более транспортных средств образуют разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения.
6. Способ управления информацией о полосе движения по любому из пп. 1-5, содержащий этапы, на которых:
указывают с использованием историй движения маршрут движения движущегося впереди транспортного средства, которое движется по полосе движения, соединенной с перекрестком; и
определяют, образуют ли два или более транспортных средств в полосе движения разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения, на основании отношения между направлением движения движущегося впереди транспортного средства и направлением движения рассматриваемого транспортного средства после въезда на перекресток и присутствия или отсутствия движущегося впереди транспортного средства.
7. Способ управления информацией о полосах движения по любому из пп. 1-6, содержащий этапы, на которых:
указывают с использованием историй движения маршрут движения движущегося сзади транспортного средства, которое движется по полосе движения, соединенной с перекрестком; и
определяют, образуют ли два или более транспортных средств в полосе движения разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения, на основании наличия или отсутствия движущегося сзади транспортного средства.
8. Способ управления информацией о полосах движения по любому из пп. 1-7, содержащий этапы, на которых:
указывают полосу движения, записанную как полоса движения, в которой два или более транспортных средств образуют разные ряды в боковом направлении упомянутых транспортных средств, в одной полосе движения, среди полос движения, представленных информацией о карте дорог; и
определяют в указанной полосе движения, образуют ли два или более транспортных средств разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения, на основании историй движения за определенный последний период.
9. Способ управления информацией о полосах движения по любому из пп. 1-8, содержащий этап, на котором
обеспечивают пользователю информацию о полосах движения, представляющую, что два или более транспортных средств образуют разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения.
10. Способ управления движением транспортного средства для управления движением рассматриваемого транспортного средства с использованием процессора на основании информации, управляемой способом управления информацией о полосах движения по любому из пп. 1-8.
11. Способ управления движением транспортного средства для управления движением рассматриваемого транспортного средства с использованием процессора на основании информации, управляемой способом управления информацией о полосах движения по п. 5, содержащий этапы, на которых:
определяют, используя датчик, установленный в рассматриваемом транспортном средстве, имеется ли другое транспортное средство в окружении рассматриваемого транспортного средства; и
управляют движением рассматриваемого транспортного средства на основании результата определения в отношении другого транспортного средства и опорной информации о движении.
12. Устройство управления информацией о полосах движения, содержащее базу данных и процессор,
причем база данных записывает информацию о карте дорог и информацию об истории движения, которая представлена траекторией движения на карте дорог,
причем процессор работает для:
получения информации о карте дорог и информации об истории движения из базы данных;
определения с использованием множества историй движения, образуют ли два или более транспортных средств в полосе движения, соединенной с перекрестком, разные ряды в боковом направлении упомянутых транспортных средств в одной полосе движения; и
записи информации о полосах движения в базе данных, включая результат определения многополосной формы в информацию о полосах движения.
13. Способ получения информации о полосах движения для получения информации о полосах движения для полосы движения, в которой движется рассматриваемое транспортное средство, от сервера для управления информацией о полосах движения, с использованием бортового контроллера в рассматриваемом транспортном средстве, содержащий этапы, на которых:
получают информацию о полосах движения, включающую в себя информацию о многополосной форме, от сервера, причем
информация о полосах движения включает в себя информацию о многополосной форме в отношении многополосной формы, определенной контроллером сервера в сервере, и
информация о многополосной форме является информацией о результате определения, образуют ли два или более транспортных средств в одной полосе движения, соединенной с перекрестком, разные ряды в боковом направлении упомянутых транспортных средств, причем упомянутое определение выполняется контроллером сервера с использованием двух или более историй движения, которые представлены траекториями движения на карте дорог.
| US 2016098496 A1, 07.04.2016 | |||
| US 2014278052 A1, 18.09.2014 | |||
| JP 2015004814 A, 08.01.2015. |

