Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к связи, а более конкретно к технологиям синхронизации в системе беспроводной связи.
Уровень техники
Системы беспроводной связи широко развернуты для того, чтобы предоставлять различное содержимое связи, например передачу речи, видео, пакетных данных, обмен сообщениями, широковещательную передачу и т.д. Эти беспроводные системы могут быть системами множественного доступа, допускающими поддержку нескольких пользователей посредством совместного использования доступных системных ресурсов. Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы с ортогональным FDMA (OFDMA) и системы FDMA с одной несущей (SCFDMA).
Система беспроводной связи может включать в себя любое число узлов B, которые могут поддерживать связь для любого числа абонентских устройств (UE). Каждый узел B может поддерживать одну или более сот, при этом термин "сота" может упоминаться как наименьшая зона покрытия узла B и/или подсистемы узла B, обслуживающей эту зону покрытия. UE (к примеру, сотовый телефон) может находиться в пределах покрытия одной или более сот в любой данный момент. UE, возможно, только что включено или, возможно, потеряло покрытие и таким образом может не знать, какие соты могут приниматься. UE может выполнять поиск сот, чтобы обнаруживать соты и получать синхронизацию и другую информацию для обнаруженных сот.
Каждая сота может передавать основные и дополнительные сигналы синхронизации, чтобы помогать UE выполнять поиск сот. В общем, сигнал синхронизации может быть любым сигналом, который помогает приемному устройству обнаруживать передающее устройство и получать синхронизацию и/или другую информацию передающего устройства. Сигналы синхронизации представляют служебную информацию и должны передаваться максимально эффективно. Кроме того, сигналы синхронизации должны давать возможность UE быстро и эффективно выполнять поиск сот.
Сущность изобретения
Технологии для назначения последовательностей основного кода синхронизации (PSC) и последовательностей дополнительного кода синхронизации (SSC) сотам в системе беспроводной связи описаны в данном документе. Эти технологии могут повышать производительность обнаружения сот для UE.
В одной схеме, по меньшей мере, одна PSC-последовательность и несколько SSC-последовательностей могут использоваться для нескольких сот в узле B. Каждой соте может назначаться PSC-последовательность и SSC-последовательность, которые могут быть определены на основе идентификационных данных (идентификатора) соты для этой соты. Основной сигнал синхронизации может быть сформирован для каждой соты на основе PSC-последовательности для этой соты. Дополнительный сигнал синхронизации может быть сформирован для каждой соты на основе SSC-последовательности для этой соты. Основные и дополнительные сигналы синхронизации для каждой соты могут быть переданы, чтобы помогать UE выполнять поиск сот.
В одной схеме доступные SSC-последовательности в системе могут компоноваться в группы, при этом каждая группа включает в себя M SSC-последовательностей, где M больше единицы. Для каждой группы из M SSC-последовательностей дополнительные группы из M SSC-последовательностей могут формироваться с помощью различных перестановок (к примеру, различных циклических сдвигов) этой группы из M SSC-последовательностей. Различные группы из M SSC-последовательностей могут назначаться сотам в различных узлах B. Узлы B, назначаемые с помощью различных перестановок данной группы из M SSC-последовательностей, могут быть разнесены так, что соты самое большее из одного из этих узлов B могут обнаруживаться посредством любого UE.
В одной схеме три PSC-последовательности могут использоваться для трех сот в узле B, и три SSC-последовательности SSC(G1), SSC(G2) и SSC(G3) могут использоваться для этих трех сот в узле B, где G1, G2 и G3 - индексы этих трех SSC-последовательностей. Первая перестановка, содержащая SSC(G3), SSC(G1) и SSC(G2) (которая соответствует циклическому сдвигу индексов на единицу), может использоваться для трех сот 1, 2 и 3, соответственно, в другом узле B. Вторая перестановка, содержащая SSC(G2), SSC(G3) и SSC(G1) (которая соответствует циклическому сдвигу индексов на два), может использоваться для трех сот 1, 2 и 3, соответственно, в еще одном узле B. Эта схема приводит к использованию различной комбинации PSC-последовательности и SSC-последовательности для каждой соты в этих трех узлах B.
Далее более подробно описаны различные аспекты и признаки изобретения.
Краткое описание чертежей
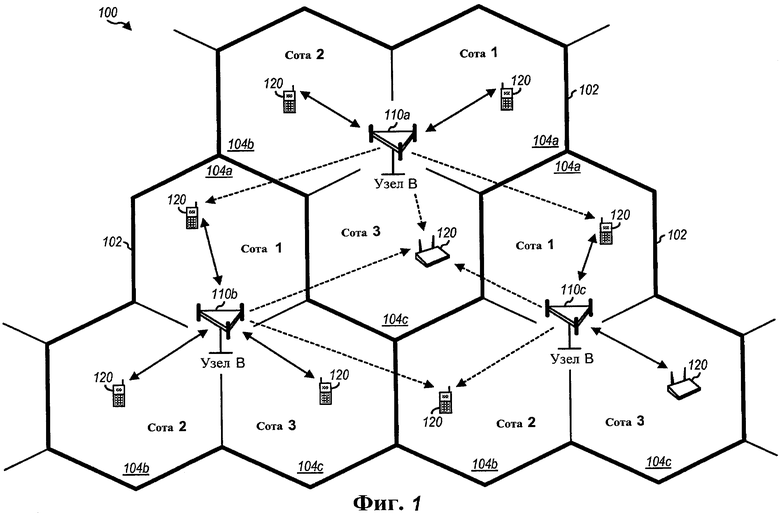
Фиг.1 иллюстрирует систему беспроводной связи.
Фиг.2 показывает передачу основных и дополнительных сигналов синхронизации.
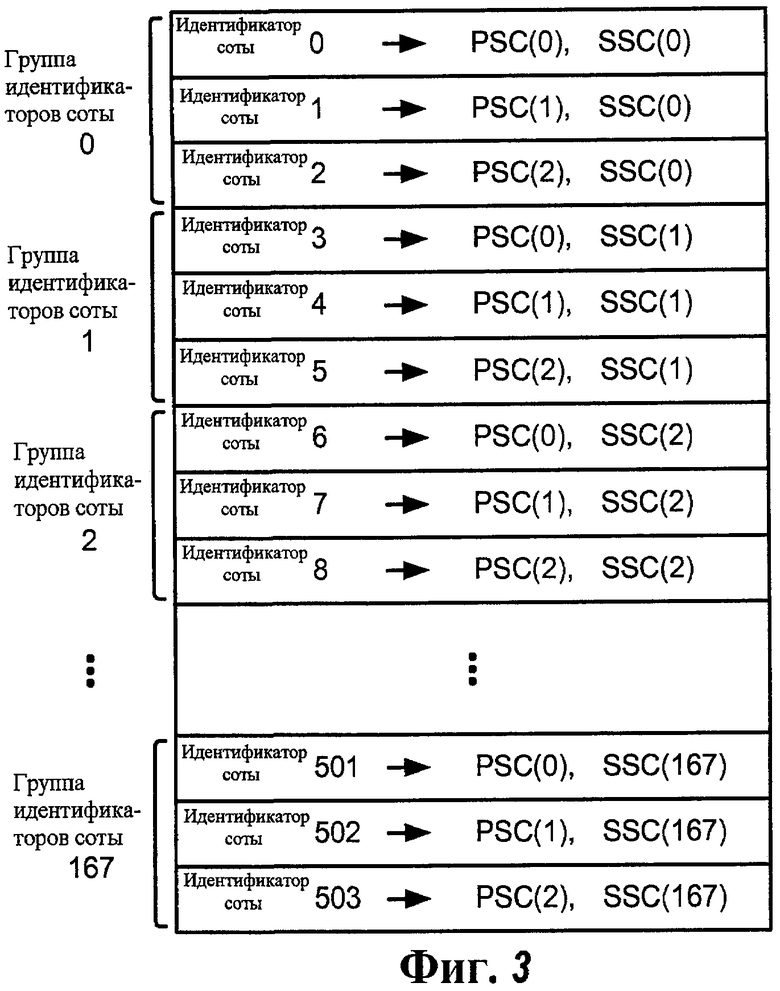
Фиг.3 показывает преобразование идентификаторов соты в PSC- и SSC-последовательности.
Фиг.4 иллюстрирует блок-схему узла B и UE.
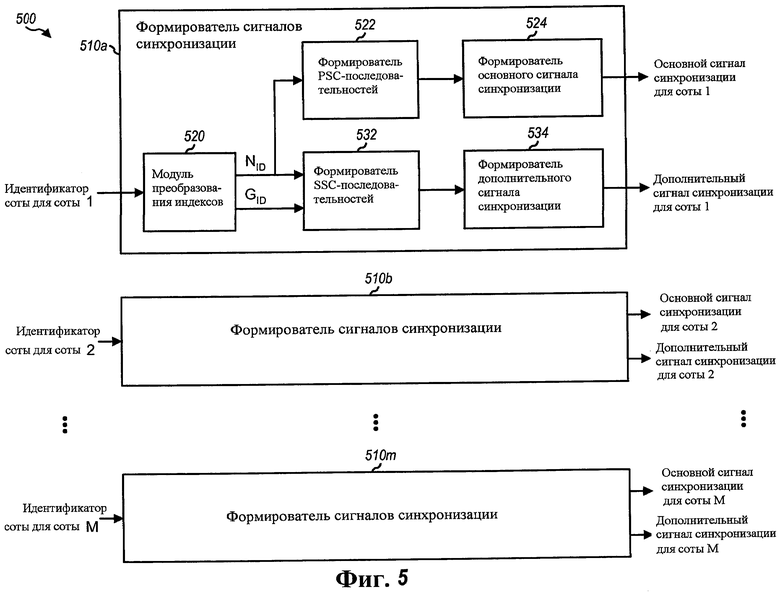
Фиг.5 показывает блок-схему формирователя сигналов синхронизации.
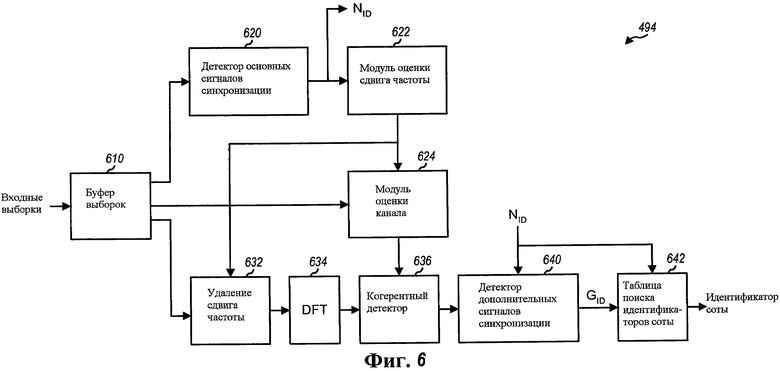
Фиг.6 иллюстрирует блок-схему процессора синхронизации в UE.
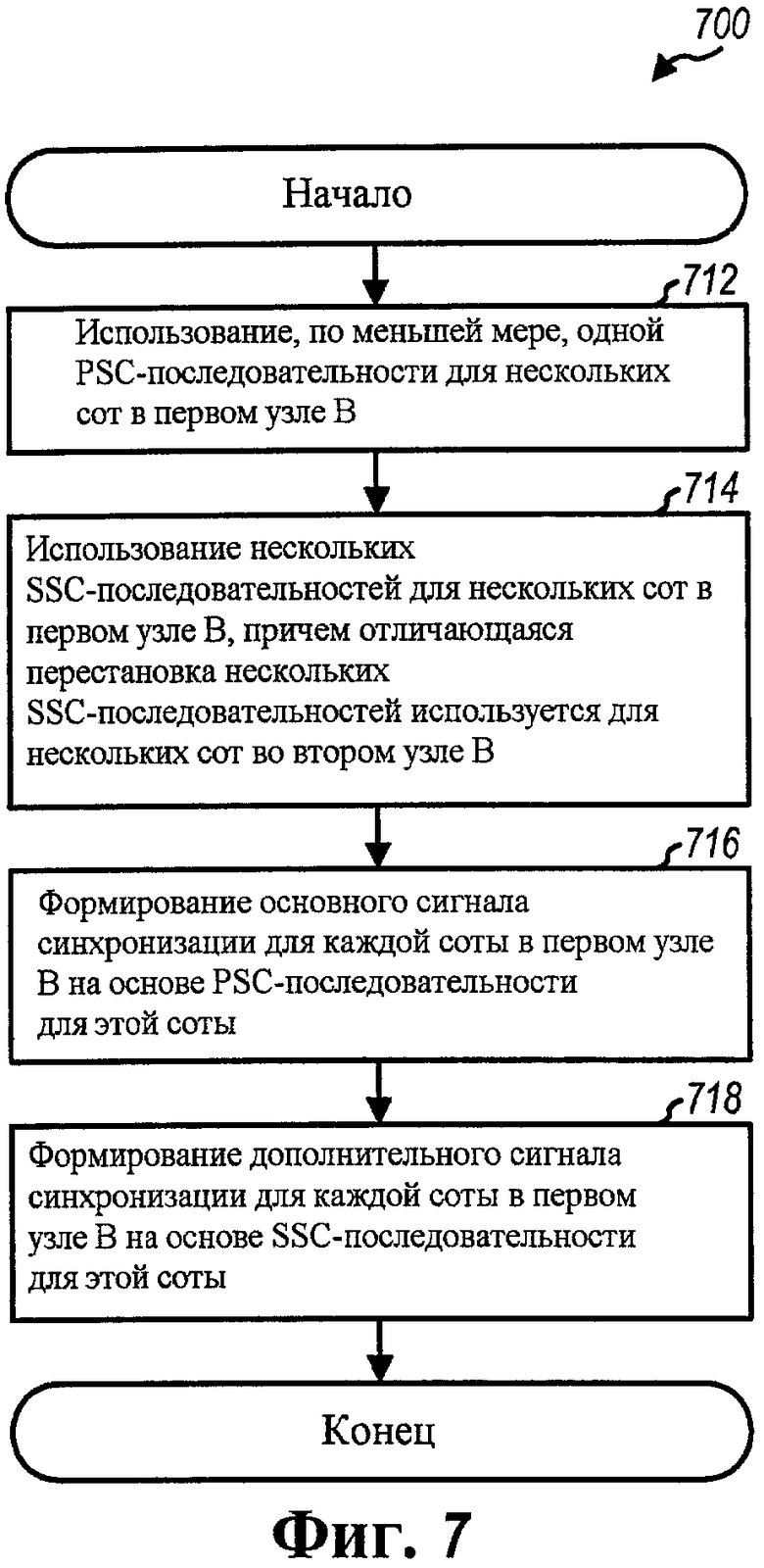
Фиг.7 показывает процесс для передачи сигналов синхронизации.
Фиг.8 иллюстрирует устройство для передачи сигналов синхронизации.
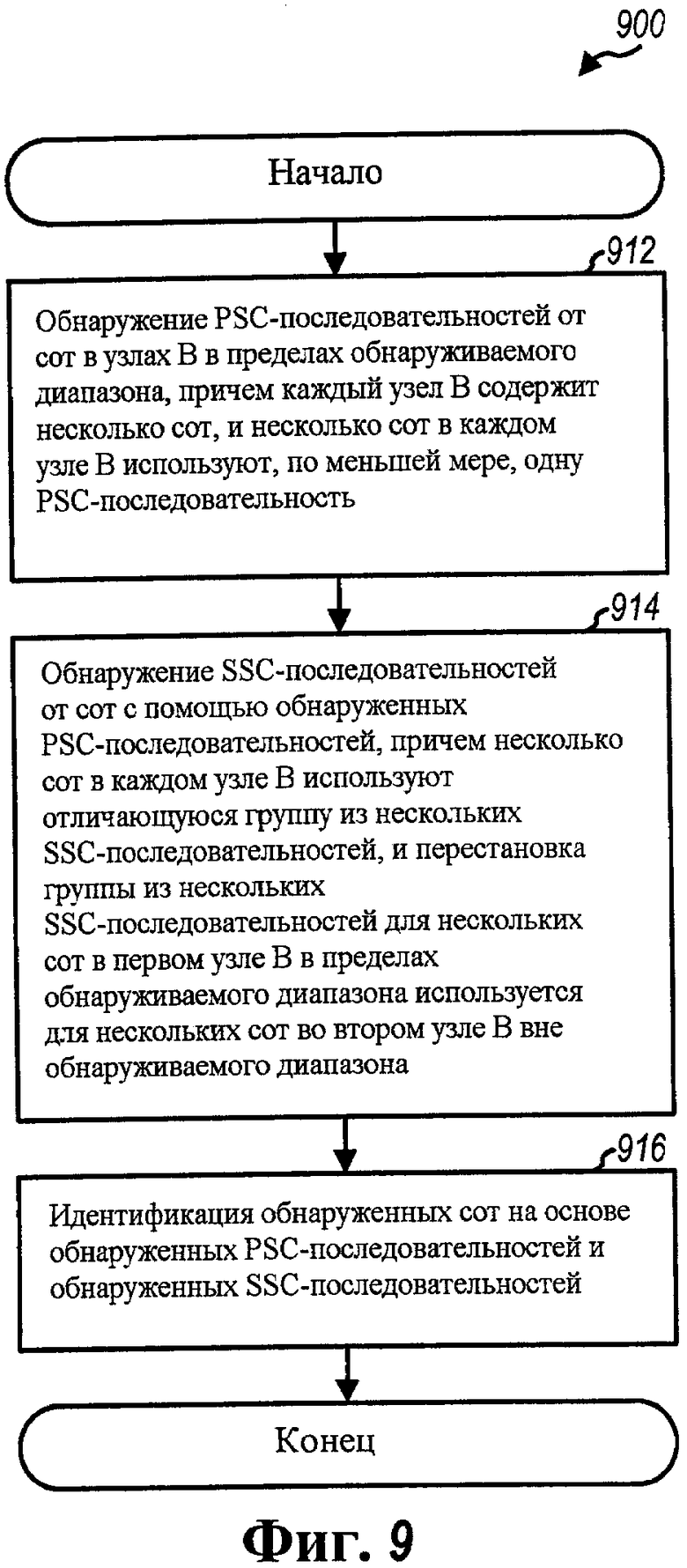
Фиг.9 показывает процесс для обнаружения сот.
Фиг.10 показывает устройство для обнаружения сот.
Подробное описание
Технологии, описанные в данном документе, могут использоваться для различных систем беспроводной связи, таких как системы CDMA, TDMA, FDMA, OFDMA, SC-FDMA и другие системы. Термины "система" и "сеть" зачастую используются взаимозаменяемо. CDMA-система может реализовывать такую технологию радиосвязи, как универсальный наземный радиодоступ (UTRA) cdma2000 и т.д. UTRA включает в себя широкополосную CDMA (WCDMA) и другие варианты CDMA. Cdma2000 покрывает стандарты IS-2000, IS-95 и IS-856. TDMA-система может реализовывать такую технологию радиосвязи, как глобальная система мобильной связи (GSM). OFDMA-система может реализовывать такую технологию радиосвязи, как усовершенствованная UTRA (E-UTRA), сверхширокополосная передача для мобильных устройств (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA и E-UTRA являются частью универсальной системы мобильной связи (UMTS). Стандарт долгосрочного развития (LTE) 3GPP является планируемой к выпуску версией UMTS, которая использует E-UTRA, которая применяет OFDMA в нисходящей линии связи и SC-FDMA в восходящей линии связи. UTRA, E-UTRA, UMTS, LTE и GSM описываются в документах организации, называемой Партнерским проектом третьего поколения (3GPP). Cdma2000 и UMB описываются в документах организации, называемой Партнерским проектом третьего поколения 2 (3GPP2). Эти различные технологии и стандарты радиосвязи известны в данной области техники. Для ясности определенные аспекты технологий описываются ниже для LTE, и ниже в большей части описания используется терминология LTE.
Фиг.1 показывает систему 100 беспроводной связи с несколькими узлами B. Для простоты только три узла B 110a, 110b и 110c показаны на фиг.1. Узел B может быть стационарной станцией, используемой для обмена данными с UE, и также может упоминаться как усовершенствованный узел B (eNB), базовая станция, точка доступа и т.д. Каждый узел B 110 предоставляет покрытие связи для конкретной географической области 102. Чтобы повышать пропускную способность системы, полная зона покрытия узла B может быть секционирована на несколько меньших зон, к примеру, три меньших зоны 104a, 104b и 104c. Каждая меньшая зона может обслуживаться посредством соответствующей подсистемы узла B. В 3GPP термин "сота" может упоминаться как наименьшая зона покрытия узла B и/или подсистема узла B, обслуживающая эту зону покрытия. В других системах термин "сектор" может упоминаться как наименьшая зона покрытия и/или подсистема, обслуживающая эту зону покрытия. Для понятности понятие соты из 3GPP используется в описании ниже.
В примере, показанном на фиг.1, каждый узел B 110 имеет три соты 1, 2 и 3, которые покрывают различные географические области. Соты узлов B 110a, 110b и 110c могут работать на одной частоте или на различных частотах. Для понятности фиг.1 показывает соты узлов B, не перекрывающие друг друга. В практическом развертывании соседние соты каждого узла B типично перекрывают друг друга на границах. Кроме того, каждая сота каждого узла B типично перекрывает одну или более других сот одного или более смежных узлов B на границах. Это перекрытие границ покрытия может обеспечивать то, что UE может принимать покрытие от одной или более сот в любом местоположении по мере того, как UE перемещается в системе.
UE 120 могут быть распределены по системе, и каждое UE может быть стационарным или мобильным. UE также может упоминаться как мобильная станция, терминал, терминал доступа, абонентское устройство, станция и т.д. UE может быть сотовый телефон, персональное цифровое устройство (PDA), беспроводной модем, устройство беспроводной связи, карманное устройство, портативный компьютер, беспроводной телефон и т.д. UE может обмениваться данными с узлом B через передачу по нисходящей линии связи и восходящей линии связи. Нисходящая линия связи (или прямая линия связи) упоминается как линия связи от узла B к UE, а восходящая линия связи (или обратная линия связи) упоминается как линия связи от UE к узлу B. На фиг.1 сплошная линия с двойными стрелками указывает связь между узлом B и UE. Пунктирная линия с одной стрелкой указывает прием посредством UE сигнала нисходящей линии связи от узла B. UE может выполнять поиск сот на основе сигналов нисходящей линии связи, передаваемых посредством узлов B.
В системе 100 узлы B 110 могут периодически передавать сигналы синхронизации, чтобы давать возможность UE 120 обнаруживать соты в каждом узле B и получать такую информацию, как синхронизация, сдвиг частоты, идентификатор соты и т.д. Сигналы синхронизации могут быть сформированы и переданы по-разному. В одной схеме, которая описывается подробно ниже, каждый узел B периодически передает основной сигнал синхронизации и дополнительный сигнал синхронизации для каждой соты в этом узле B. Основной сигнал синхронизации также может упоминаться как PSC, основной канал синхронизации (P-SCH) и т.д. Дополнительный сигнал синхронизации также может упоминаться как SSC, дополнительный канал синхронизации (S-SCH) и т.д. Основные и дополнительные сигналы синхронизации также могут упоминаться под другими названиями.
Фиг.2 показывает примерную передачу основных и дополнительных сигналов синхронизации для одной соты в соответствии с одной схемой. Временная шкала передачи для нисходящей линии связи может быть секционирована на единицы радиокадров. Каждый радиокадр может иметь заранее определенную длительность (к примеру, 10 миллисекунд (мс)) и может быть секционирован на 20 временных квантов с индексами от 0 до 19. Каждый временной квант может покрывать фиксированное или конфигурируемое число символов мультиплексирования с ортогональным частотным разделением каналов (OFDM), к примеру шесть или семь OFDM-символов. В схеме, показанной на фиг.2, основные и дополнительные сигналы синхронизации отправляются в двух OFDM-символах в каждом из временных квантов 0 и 10 каждого радиокадра. В общем, основные и дополнительные сигналы синхронизации могут отправляться с любой интенсивностью, к примеру, любое количество раз в каждом радиокадре. Дополнительный сигнал синхронизации может отправляться рядом (к примеру, сразу перед или после) с основным сигналом синхронизации, так чтобы оценка канала могла быть извлечена из основного сигнала синхронизации и использована для когерентного обнаружения дополнительного сигнала синхронизации.
Каждой соте может назначаться идентификатор соты, который является уникальным среди всех сот в пределах определенного диапазона этой соты. Это должно давать возможность каждому UE уникально идентифицировать все соты, обнаруживаемые посредством этого UE, независимо от местоположения UE. Система может поддерживать набор идентификаторов соты. Каждой соте затем может назначаться конкретный идентификатор соты из поддерживаемого набора идентификаторов соты.
В одной схеме каждая сота может передавать свой идентификатор соты в основных и дополнительных сигналах синхронизации, передаваемых посредством этой соты. Чтобы снижать сложность обнаружения для UE, идентификатор соты может быть секционирован на две части. Первая часть идентификатора соты может быть передана в основном сигнале синхронизации. Вторая часть идентификатора соты может быть передана в дополнительном сигнале синхронизации.
UE может обнаруживать основные и дополнительные сигналы синхронизации от сот с использованием двухстадийного процесса обнаружения. На стадии обнаружения PSC UE может обнаруживать основные сигналы синхронизации от сот. Поскольку UE может не иметь синхронизации соты на этой стадии, UE может обнаруживать основные сигналы синхронизации в каждом периоде дискретизации. Желательно иметь относительно небольшую первую часть идентификатора соты, чтобы сокращать число гипотез для тестирования в каждом периоде дискретизации для стадии обнаружения PSC. На стадии обнаружения SSC UE может обнаруживать дополнительный сигнал синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации.
В одной схеме набор из 504 уникальных идентификаторов соты поддерживается посредством системы. 504 идентификатора соты группируются в 168 уникальных групп идентификаторов сот, и каждая группа идентификаторов сот содержит три уникальных идентификатора соты. Группировка осуществляется так, что каждый идентификатор соты включается только в одну группу идентификаторов сот. Идентификатор соты может быть выражен следующим образом:
CID=3*GID+NID, уравнение(1)
где CID  {0, …, 503} является идентификатором соты,
{0, …, 503} является идентификатором соты,
GID  {0, …, 167} является индексом группы идентификаторов сот, которой принадлежит идентификатор соты, и
{0, …, 167} является индексом группы идентификаторов сот, которой принадлежит идентификатор соты, и
NID {0, 1, 2} является индексом конкретного идентификатора в группе идентификаторов сот.
В схеме, показанной в уравнении (1), идентификатор соты уникально задается (i) посредством первого числа в пределах диапазона от 0 до 167, представляющего группу идентификаторов сот, и (ii) второго числа в пределах диапазона от 0 до 2, представляющего идентификатор в группе идентификаторов сот.
Три PSC-последовательности могут быть заданы для трех возможных значений NID, т.е. для трех идентификаторов соты в каждой группе. Помимо этого 168 SSC-последовательностей могут быть заданы для 168 возможных значений GID, т.е. для 168 возможных групп идентификаторов сот. PSC- и SSC-последовательности могут быть выражены следующим образом:
- PSC(Nid) представляет PSC-последовательность для индекса NID, где NID {0, 1, 2}, и
- SSC(Gid) представляет SSC-последовательность для индекса GID, где GID {0, …, 167}.
Три PSC-последовательности могут обозначаться как PSC(0), PSC(1) и PSC(2). Эти 168 SSC-последовательностей могут обозначаться как SSC(0), SSC(1), …, SSC(167). PSC-последовательность также может упоминаться как PSC-код, P-SCH-код, основная последовательность синхронизации и т.д. SSC-последовательность также может упоминаться как SSC-код, S-SCH-код, дополнительная последовательность синхронизации и т.д.
Фиг.3 показывает преобразование идентификаторов соты в PSC- и SSC-последовательности в соответствии с уравнением (1). Идентификаторы соты могут варьироваться от 0 до 503 и могут быть разделены на группы идентификаторов сот от 0 до 167, при этом каждая группа идентификаторов сот включает в себя три последовательных идентификатора соты. Три идентификатора соты в каждой группе m могут преобразовываться в PSC(0), PSC(1) и PSC (2) и один SSC(m). Таким образом, идентификатор соты 0 может преобразовываться в PSC(0) и SSC(0), идентификатор соты 1 может преобразовываться в PSC(1) и SSC(0) и т.д., и идентификатор соты 503 может преобразовываться в PSC (2) и SSC(167).
PSC- и SSC-последовательности могут быть сформированы по-разному. В одной схеме PSC-последовательность может быть сформирована на основе последовательности Задова-Чу следующим образом:
 уравнение (2)
уравнение (2)
где u - это корневой индекс, определенный посредством NID, и dpsc(n) является PSC-последовательностью, причем n является примерным индексом.
Различные PSC-последовательности могут быть сформированы с различными индексами u для последовательности Задова-Чу, причем u определяется посредством NID. Например, u может быть равным 25, 29 и 34 для NID 0, 1 и 2, соответственно.
В одной схеме SSC-последовательность может быть сформирована на основе последовательности максимальной длины (M-последовательности) следующим образом:
 для n=0, 1, …, 30, уравнение (3a)
для n=0, 1, …, 30, уравнение (3a)
 для n=0, 1, …, 30, уравнение (3b)
для n=0, 1, …, 30, уравнение (3b)
где s0(n) и s1(n) являются двумя циклическими сдвигами M-последовательности и формируются на основе GID, c0(n), и c1(n) являются двумя последовательностями скремблирования, сформированными на основе NID, z0(n), и z1(n) являются двумя последовательностями скремблирования, сформированными на основе GID, и dssc(n) является SSC-последовательностью.
В схеме, показанной в наборе уравнений (3), два циклических сдвига M-последовательности перемежаются и скремблируются, чтобы формировать SSC-последовательность. SSC-последовательность для временного кванта 0 формируется отлично от SSC-последовательности для временного кванта 10. Различные SSC-последовательности могут быть сформированы с различными циклическими сдвигами M-последовательности, при этом циклические сдвиги определяются посредством GID.
Формирование PSC-последовательностей на основе последовательности Задова-Чу и формирование SSC-последовательностей на основе M-последовательности описывается в документе 3GPP TS 36.211, озаглавленном "Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation (Release 8)", который является общедоступным. PSC- и SSC-последовательности также могут быть сформированы другими способами.
В общем, система может поддерживать любое число идентификаторов соты, идентификаторы соты могут быть скомпонованы в любое число групп, и каждая группа может включать в себя любое число идентификаторов соты. Число групп и число идентификаторов соты в каждой группе может выбираться на основе сложности обнаружения PSC и SSC. Меньший размер группы соответствует меньшей сложности обнаружения PSC и большей сложности обнаружения SSC. Обратное утверждение истинно для большего размера группы. Для понятности большая часть нижеприведенного описания приводится для схемы, показанной в уравнении (1) со 168 группами идентификаторов сот и тремя идентификаторами соты в каждой группе идентификаторов сот.
PSC-последовательность может обрабатываться, чтобы формировать основной сигнал синхронизации. SSC-последовательность может обрабатываться, чтобы формировать дополнительный сигнал синхронизации. Может быть предусмотрено преобразование "один-к-одному" между PSC-последовательностью и основным сигналом синхронизации, а также преобразование "один-к-одному" между SSC-последовательностью и дополнительным сигналом синхронизации.
В аспекте сотам в системе могут назначаться PSC- и SSC-последовательности таким образом, чтобы повышать производительность обнаружения сот посредством UE. В одной схеме соседним сотам в узле B могут назначаться различные PSC-последовательности. Если узел B имеет три соты, то первой соте может назначаться PSC(0), второй соте может назначаться PSC(1), а третьей соте может назначаться PSC(2). Если узел B имеет менее трех сот, то может использоваться поднабор из трех PSC-последовательностей, по одной PSC-последовательности для каждой соты. Если узел B имеет более трех сот, то три PSC-последовательности могут использоваться больше одного раза, к примеру, посредством чередования трех PSC-последовательностей столько раз, сколько требуется, и назначения соседним сотам различных PSC-последовательностей. В другой схеме одна PSC-последовательность может использоваться для всех сот в узле B.
В одной схеме различным сотам в узле B могут назначаться различные SSC-последовательности, так что двум сотам не назначается одинаковая SSC-последовательность. Различные группы SSC-последовательностей могут формироваться на основе всех доступных SSC-последовательностей в системе. Каждая группа может содержать различные SSC-последовательности, которые могут назначаться различным сотам в узле B.
В одной схеме различная комбинация PSC-последовательности и SSC-последовательности используется для каждой соты в узле B. Эта схема может не допускать наблюдение посредством UE фазового рассогласования между PSC и SSC, которое также упоминается как эффект "SFN". UE может обнаруживать PSC от соты и затем может использовать PSC в качестве опорной фазы для когерентного обнаружения SSC от соты. Фаза PSC может совпадать или не совпадать с фазой SSC в зависимости от того, как PSC- и SSC-последовательности назначаются сотам.
Если узел B имеет три соты, которым назначены три различных PSC-последовательности и одинаковая SSC-последовательность, то UE может оценивать комплексные канальные усиления h1, h2 и h3 для этих трех сот на основе трех различных основных сигналов синхронизации от этих сот. Тем не менее, три дополнительных сигнала синхронизации от этих сот должны быть идентичными и могут приниматься с комплексным канальным усилением h=h1+h2+h3 в UE. Таким образом, должно быть фазовое рассогласование, если любое из канальных усилений h1, h2 и h3 используется для когерентного обнаружения дополнительного сигнала синхронизации.
Если трем сотам в узле B назначены три различных PSC-последовательности и три различных SSC-последовательности, то UE должно принимать три дополнительных сигнала синхронизации с комплексными канальными усилениями h1, h2 и h3 для трех сот. UE затем должен иметь возможность выполнять когерентное обнаружение для дополнительного сигнала синхронизации от каждой соты с канальным усилением, извлеченным из основного сигнала синхронизации от этой соты.
Использование различных SSC-последовательностей для различных сот в каждом узле B также может не допускать наблюдение посредством UE фазового рассогласования между SSC и физическими каналами нисходящей линии связи, отправляемыми посредством этих сот. После обнаружения SSC от соты UE может использовать SSC в качестве опорной фазы для демодуляции других физических каналов, отправляемых посредством соты. Эти физические каналы могут включать в себя физический широковещательный канал (PBCH), переносящий широковещательные данные, физический совместно используемый канал нисходящей линии связи (PDSCH), переносящий данные трафика, физический канал управления нисходящей линии связи (PDCCH), переносящий управляющую информацию или служебные сигналы, и т.д. Посредством использования различных SSC-последовательностей для различных сот в узле B UE может получать однозначную оценку канала для каждой соты на основе дополнительного сигнала синхронизации от этой соты. UE затем может демодулировать другие физические каналы от каждой соты на основе оценки канала, извлекаемой из дополнительного сигнала синхронизации для этой соты.
В одной схеме группа из M различных SSC-последовательностей может формироваться и назначаться M различным сотам в одном узле B, где M может быть любым целочисленным значением, большим единицы. Индексы M SSC-последовательностей могут обозначаться как G1, G2, G3, …, GM, где GM {0, …, 167} для m=1, …, M. Группа из M SSC-последовательностей может обозначаться как SSC(G1), SSC(G2), SSC(G3), …, SSC(GM). Дополнительные группы из M SSC-последовательностей могут получаться на основе различных перестановок M SSC-последовательностей, причем каждая перестановка соответствует различному упорядочению M SSC-последовательностей.
В одной схеме M перестановок группы из M SSC-последовательностей могут получаться посредством циклического сдвига группы из M SSC-последовательностей следующим образом:
- SSC(G1), SSC(G2), SSC(G3), …, SSC(GM) - это исходная группа без циклического сдвига,
- SSC(GM), SSC(G1), SSC(G2), …, SSC(GM-1) - это циклический сдвиг в единицу,
- SSC(GM-1), SSC(GM), SSC(G1), …, SSC(GM-2) - это циклический сдвиг в два, …, и
- SSC(G2), SSC(G3), SSC(G4), …, SSC(G1) - это циклический сдвиг в M-1.
Вышеприведенный циклический сдвиг выполняется для индексов G1-GM для M SSC-последовательностей, а не для любой самой SSC-последовательности. Вплоть до M различных групп из M SSC-последовательностей может формироваться с помощью вплоть до M различных циклических сдвигов исходной группы из M SSC-последовательностей. Эти различные циклически сдвинутые группы из M SSC-последовательностей могут назначаться различным узлам B, располагающимся по всей системе. Узлы B, которым назначены циклически сдвинутые группы из M SSC-последовательностей, могут быть разнесены так, что UE не может обнаруживать более одной циклически сдвинутой группы из M SSC-последовательностей от более одного узла B. Это позволяет исключать неоднозначность в обнаружении сот в различных узлах B.
В одной схеме три циклически сдвинутых группы из трех SSC-последовательностей могут формироваться следующим образом:
- SSC(G1), SSC(G2), SSC(G3) - это исходная группа без циклического сдвига,
- SSC(G3), SSC(G1), SSC(G2) - это циклический сдвиг в единицу и
- SSC(G2), SSC(G3), SSC(G1) - это циклический сдвиг в два.
В одной схеме три циклически сдвинутых группы из трех SSC-последовательностей могут назначаться трем узлам B, как показано в таблице 1. Для схемы, показанной в таблице 1, три PSC-последовательности и различные циклически сдвинутые группы SSC-последовательностей используются для трех сот в каждом узле B, и девять уникальных идентификаторов соты используются для девяти сот в трех узлах B.
Схема в таблице 1 имеет следующие преимущественные характеристики:
- каждая сота в данном узле B использует различную PSC-последовательность,
- каждая сота в данном узле B использует различную SSC-последовательность,
- PSC от каждой соты может использоваться в качестве опорной фазы для обнаружения SSC и
- SSC от каждой соты может использоваться в качестве опорной фазы для демодуляции других физических каналов нисходящей линии связи от этой соты.
В другой схеме три циклически сдвинутых группы из трех SSC-последовательностей могут назначаться трем узлам B, как показано в таблице 2. Для схемы, показанной в таблице 2, одна PSC-последовательность PSC(x) используется для всех сот в этих трех узлах B, различная циклически сдвинутая группа SSC-последовательностей используется для трех сот в каждом узле B, и одинаковые три уникальных идентификатора соты используются для этих трех сот в каждом из узлов B.
В схемах, показанных в таблицах 1 и 2, три циклически сдвинутых группы SSC-последовательностей могут использоваться для трех узлов B. Эти узлы B могут быть расположены достаточно далеко друг от друга так, чтобы соты только в одном узле B могли обнаруживаться посредством любого UE.
В общем, любое число групп из M SSC-последовательностей может формироваться с помощью любого числа перестановок исходной группы из M SSC-последовательностей. Перестановки могут осуществляться с помощью циклических сдвигов, которые могут упрощать формирование дополнительных групп из M SSC-последовательностей и также могут обеспечивать применение уникальных идентификаторов соты для сот, которым назначаются эти группы из M SSC-последовательностей. Перестановки также могут осуществляться посредством переупорядочения M SSC-последовательностей другими способами.
В одной схеме конкретные SSC-последовательности могут группироваться и использоваться для сот в одном и том же узле B. Например, доступные SSC-последовательности могут компоноваться в группы из M SSC-последовательностей, и каждая группа из M SSC-последовательностей может использоваться для сот в одном узле B. Эта схема должна давать возможность UE устанавливать то, находятся ли обнаруженные соты в одном узле B. Эта информация может быть полезной для более эффективной работы. Например, поскольку соты в одном узле B имеют одинаковую синхронизацию, UE может получать синхронизацию только первой соты в данном узле B и может использовать эту синхронизацию для каждой оставшейся соты в узле B. UE также может быть способен выполнять передачу обслуживания между узлами B от одной соты другой соте в одном узле B без необходимости выполнять произвольный доступ, который может требоваться для передачи обслуживания между узлами B.
В другой схеме большая группа из более чем M SSC-последовательностей может формироваться с помощью различных переставляемых (к примеру, циклически сдвинутых) групп из M SSC-последовательностей. Большая группа из более чем M SSC-последовательностей может назначаться узлу B с более чем M сот. Например, M может быть равно трем, и группа из трех SSC-последовательностей SSC(G1), SSC(G2) и SSC(G3) может формироваться. Большая группа из K SSC-последовательностей может формироваться с помощью различных циклически сдвинутых групп из трех SSC-последовательностей, где K может быть равно 4, 5, 6 и т.д. K может быть или не быть кратным M. Большая группа из K SSC-последовательностей может назначаться узлу B с K сот. Эта схема может использоваться для того, чтобы поддерживать узлы B с различным числом сот, и дополнительно может давать возможность UE определять соты в одном узле B на основе обнаруженных SSC-последовательностей.
Технологии, описанные в данном документе, могут предоставлять следующие преимущества:
- предотвращение фазового рассогласования между PSC и SSC каждой соты,
- предотвращение фазового рассогласования между SSC и другими каналами нисходящей линии связи каждой соты,
- простая структура циклического сдвига дополнительных групп SSC-последовательностей и
- предоставление возможности UE определять соты в одном узле B, даже когда есть более трех сот в узле B.
Фиг.4 иллюстрирует блок-схему структуры узла B 110 и UE 120, которые являются одним из узлов B и одним из UE на фиг.1. В этой схеме узел B 110 оснащен T антеннами 434a-424t, а UE 120 оснащен R антеннами 452a-452r, где, в общем, T>1 и R>1.
В узле B 110 передающий процессор 420 может принимать данные для одного или более UE из источника данных 412, обрабатывать данные для каждого UE на основе одной или более схем модуляции и кодирования, выбранных для этого UE, и предоставлять символы данных для всех UE. Передающий процессор 420 также может формировать основные и дополнительные сигналы синхронизации для каждой соты и предоставлять выборки для всех основных и дополнительных сигналов синхронизации. Передающий (TX) процессор 430 со многими входами и многими выходами (MIMO) может мультиплексировать символы данных, пилотные символы и выборки для сигналов синхронизации, выполнять пространственную обработку (к примеру, предварительное кодирование) для мультиплексированных символов и выборок, если применимо, и предоставлять выходные потоки символов в T модуляторов (MOD) 432a-432t. Каждый модулятор 432 может обрабатывать соответствующий выходной поток символов (к примеру, для OFDM), чтобы получать выходной поток символов шумоподобного последовательности. Каждый модулятор 432 дополнительно может обрабатывать (к примеру, преобразовывать в аналоговую форму, усиливать, фильтровать и преобразовывать с повышением частоты) выходной поток символов шумоподобного последовательности, чтобы получать сигнал нисходящей линии связи. T сигналов нисходящей линии связи от модуляторов 432a-432t могут быть переданы через T антенн 434a-434t, соответственно.
В UE 120 антенны 452a-452r могут принимать сигналы нисходящей линии связи от узла B 110 и предоставлять принимаемые сигналы в демодуляторы (DEMOD) 454a-454r, соответственно. Каждый демодулятор 454 может приводить к требуемым параметрам (к примеру, фильтровать, усиливать, преобразовывать с понижением частоты и оцифровывать) соответствующий принимаемый сигнал, чтобы получать входные выборки, и дополнительно может обрабатывать входные выборки (к примеру, для OFDM), чтобы получать принимаемые символы. MIMO-детектор 460 может получать принимаемые символы от всех R демодуляторов 454a-454r, выполнять MIMO-обнаружение для принимаемых символов, если применимо, и предоставлять обнаруженные символы. Приемный процессор 470 может обрабатывать (к примеру, демодулировать, выполнять обратное перемежение и декодировать) обнаруженные символы и предоставлять декодированные данные для UE 120 в приемник 472 данных. В общем, обработка посредством MIMO-детектора 460 и приемного процессора 470 комплементарна обработке посредством TX MIMO-процессора 430 и передающего процессора 420 в узле B 110.
В восходящей линии связи в UE 120 данные из источника 478 данных и служебные сигналы из контроллера/процессора 490 могут обрабатываться посредством передающего процессора 480, дополнительно обрабатываться посредством TX MIMO-процессора 482, если применимо, приводиться к требуемым параметрам посредством модуляторов 454a-454r и передаваться в узел B 110. В узле B 110 сигналы восходящей линии связи от UE 120 могут приниматься посредством антенн 434, приводиться к требуемым параметрам посредством демодуляторов 432, обрабатываться посредством MIMO-детектора 436, если применимо, и дополнительно обрабатываться посредством приемного процессора 438, чтобы получать данные и служебные сигналы, передаваемые посредством UE 120.
Контроллеры/процессоры 440 и 490 могут направлять работу в узле B 110 и UE 120, соответственно. Запоминающие устройства 442 и 492 могут сохранять данные и программные коды для узла B 110 и UE 120, соответственно. Процессор 494 синхронизации (Sync) может обнаруживать основные и дополнительные сигналы синхронизации от сот на основе входных выборок и может предоставлять обнаруженные соты и их синхронизацию, идентификаторы соты и т.д. Планировщик 444 может диспетчеризовать UE для передачи по нисходящей линии связи и/или по восходящей линии связи и может предоставлять назначения ресурсов для диспетчеризованных UE.
Фиг.5 показывает блок-схему конструкции формирователя 500 сигналов синхронизации для узла B 110. Формирователь 500 может быть частью передающего процессора 420 и/или модуляторов 432 на фиг.4. Формирователь 500 включает в себя M формирователей 510a-510m сигналов синхронизации для M сот в узле B. Каждый формирователь 510 принимает идентификатор соты для своей соты и формирует основные и дополнительные сигналы синхронизации для соты.
В формирователе 510a для соты 1 модуль 520 преобразования индексов принимает идентификатор соты для соты 1 и предоставляет индексы GID и NID для идентификатора соты, к примеру, как показано в уравнении (1). Формирователь 522 формирует PSC-последовательность для соты 1 на основе индекса NID, к примеру, как показано в уравнении (2). Формирователь 524 формирует основной сигнал синхронизации для соты 1 на основе PSC-последовательности, к примеру, посредством преобразования выборок в PSC-последовательности в поднесущие, используемые для основного сигнала синхронизации, и выполнения OFDM-модуляции для преобразованных выборок.
Формирователь 532 формирует SSC-последовательность для соты 1 на основе индексов GID и NID, к примеру, как показано в наборе уравнений (3). Формирователь 534 формирует дополнительный сигнал синхронизации для соты 1 на основе SSC-последовательности, к примеру, посредством преобразования выборок в SSC-последовательности в поднесущие, используемые для дополнительного сигнала синхронизации, и выполнения OFDM-модуляции для преобразованных выборок.
Формирователи 510b-510m аналогично формируют основные и дополнительные сигналы синхронизации для сот 2-M, соответственно. Каждый формирователь 510 формирует основные и дополнительные сигналы синхронизации для своей соты на основе различной комбинации PSC- и SSC-последовательностей, определенной посредством идентификатора соты.
Фиг.6 показывает блок-схему схемы процессора 494 синхронизации в UE 120 на фиг.4. В процессоре 494 синхронизации, буфер 610 выборок может принимать и сохранять входные выборки и предоставлять соответствующие входные выборки при запрашивании. Детектор 620 может обнаруживать основной сигнал синхронизации в каждой гипотезе синхронизации, к примеру, каждый период дискретизации. Детектор 620 может коррелировать входные выборки с различными возможными PSC-последовательностями, чтобы получать результаты корреляции для каждой гипотезы синхронизации. Детектор 620 затем может определять то, обнаружен или нет основной сигнал синхронизации, на основе результатов корреляции. Если основной сигнал синхронизации обнаружен, то детектор 620 может предоставлять обнаруженную PSC-последовательность, символьную синхронизацию и информацию (к примеру, NID), отправленную в основном сигнале синхронизации. Модуль 622 может оценивать сдвиг частоты на основе результатов корреляции из детектора 620. Модуль 624 оценки канала может извлекать оценку канала посредством удаления обнаруженной PSC-последовательности из входных выборок и извлечения канальных усилений для различных поднесущих.
SSC-обнаружение может выполняться каждый раз, когда основной сигнал синхронизации обнаружен. Модуль 632 может получать входные выборки для OFDM-символа (к примеру, во временном кванте 0 или 10) и удалять оцененный сдвиг частоты из этих выборок. Модуль 634 дискретного преобразования Фурье (DFT) может преобразовывать частотно-скорректированные выборки в частотную область и предоставлять принимаемые символы. Когерентный детектор 636 может выполнять когерентное обнаружение принимаемых символов с канальными усилениями от модуля 624 оценки канала и предоставлять входные символы. Детектор 640 может обнаруживать дополнительный сигнал синхронизации на основе входных символов и информации идентификатора соты (к примеру, NID) от детектора 620. Детектор 640 может коррелировать входные символы с различными возможными SSC-последовательностями, чтобы получать результаты корреляции, и может определять то, обнаружен или нет дополнительный сигнал синхронизации на основе результатов корреляции. Если дополнительный сигнал синхронизации обнаружен, то детектор 640 может предоставлять обнаруженную SSC-последовательность, кадровую синхронизацию и информацию (к примеру, GID), отправленную в дополнительном сигнале синхронизации. Таблица 642 поиска может принимать обнаруженные GID и NID и предоставлять идентификатор соты для каждой обнаруженной соты.
Фиг.7 показывает схему процесса 700 для передачи сигналов синхронизации в системе беспроводной связи. Процесс 700 может выполняться посредством узла B. По меньшей мере, одна PSC-последовательность может использоваться для нескольких сот в первом узле B (этап 712). Несколько SSC-последовательностей могут использоваться для нескольких сот в первом узле B, причем различная перестановка нескольких SSC-последовательностей используется для нескольких сот во втором узле B (этап 714). Несколько SSC-последовательностей могут быть ассоциированы вместе и использованы для того, чтобы идентифицировать соты, принадлежащие одному узлу B. Первый и второй узлы B могут быть разнесены так, что соты самое большее от одного из первого и второго узлов B являются обнаруживаемыми посредством любого UE в системе.
Основной сигнал синхронизации может быть сформирован для каждой соты в первом узле B на основе PSC-последовательности для этой соты (этап 716). На этапе 716 выборки PSC-последовательности могут преобразовываться в поднесущие, и основной сигнал синхронизации может быть сформирован с помощью преобразованных выборок (к примеру, посредством выполнения OFDM-модуляции для преобразованных выборок). Дополнительный сигнал синхронизации может быть сформирован для каждой соты в первом узле B на основе SSC-последовательности для этой соты (этап 718). На этапе 718 выборки SSC-последовательности могут преобразовываться в поднесущие, и дополнительный сигнал синхронизации может быть сформирован с помощью преобразованных выборок.
В одной схеме одна PSC-последовательность может использоваться для всех сот в первом узле B. В другой схеме различные PSC-последовательности могут использоваться для соседних сот в первом узле B. В еще одной схеме различная PSC-последовательность может использоваться для каждой соты в первом узле B, так что две соты не используют одну PSC-последовательность. В одной схеме различная SSC-последовательность может использоваться для каждой соты в первом узле B, так что две соты не используют одну SSC-последовательность. В другой схеме различные SSC-последовательности могут использоваться для соседних сот в первом узле B.
В одной схеме три PSC-последовательности и три SSC-последовательности используются для трех сот в первом узле B, и перестановка (к примеру, циклический сдвиг) этих трех SSC-последовательностей используется для трех сот во втором узле B. Три SSC-последовательности SSC(G1), SSC(G2) и SSC(G3) могут использоваться для трех сот 1, 2 и 3, соответственно, в первом узле B, где G1, G2 и G3 - индексы этих трех SSC-последовательностей. Первая перестановка, содержащая SSC(G3), SSC(G1) и SSC(G2), или вторая перестановка, содержащая SSC(G2), SSC(G3) и SSC(G1), может использоваться для трех сот 1, 2 и 3, соответственно, во втором узле B.
PSC-последовательность и SSC-последовательность для каждой соты в первом узле B могут быть определены на основе идентификатора этой соты. В одной схеме нескольким сотам в первом узле B и нескольким сотам во втором узле B назначаются различные идентификаторы соты. Различная комбинация PSC-последовательности и SSC-последовательности может использоваться для каждой соты в первом и втором узлах B.
Фиг.8 показывает схему устройства 800 для передачи сигналов синхронизации в системе беспроводной связи. Устройство 800 включает в себя модуль 812, чтобы использовать, по меньшей мере, одну PSC-последовательность для нескольких сот в первом узле B, модуль 814, чтобы использовать несколько SSC-последовательностей для нескольких сот в первом узле B, причем различная перестановка нескольких SSC-последовательностей используется для нескольких сот во втором узле B, модуль 816, чтобы формировать основной сигнал синхронизации для каждой соты в первом узле B на основе PSC-последовательности для этой соты, и модуль 818, чтобы формировать дополнительный сигнал синхронизации для каждой соты в первом узле B на основе SSC-последовательности для этой соты.
Фиг.9 показывает схему процесса 900 для обнаружения сот в системе беспроводной связи. Процесс 900 может выполняться посредством UE. UE может обнаруживать PSC-последовательности от сот в узлах B в пределах обнаруживаемого диапазона (этап 912). Каждый узел B может содержать несколько сот, и несколько сот в каждом узле B могут использовать, по меньшей мере, одну PSC-последовательность. UE может обнаруживать SSC-последовательности от сот с помощью обнаруженных PSC-последовательностей (этап 914). Несколько сот в каждом узле B могут использовать различную группу из нескольких SSC-последовательностей. Перестановка группы из нескольких SSC-последовательностей, используемых для нескольких сот в первом узле B в пределах обнаруживаемого диапазона, может использоваться для нескольких сот во втором узле B вне обнаруживаемого диапазона. UE может идентифицировать обнаруженные соты на основе обнаруженных PSC-последовательностей и обнаруженных SSC-последовательностей (этап 916). Например, UE может определять идентификатор соты каждой обнаруженной соты на основе обнаруженной PSC-последовательности и SSC-последовательности для этой соты. UE также может идентифицировать обнаруженные соты, принадлежащие одному узлу B, на основе отличающейся группы из нескольких SSC-последовательностей, используемых для нескольких сот в каждом узле B.
В одной схеме UE может обнаруживать, по меньшей мере, одну PSC-последовательность от трех сот в каждом узле B в пределах обнаруживаемого диапазона. UE может обнаруживать SSC-последовательности от сот с помощью обнаруженных PSC-последовательностей, причем эти три соты в каждом узле B используют различную группу из трех SSC-последовательностей. Перестановка группы из трех SSC-последовательностей для трех сот в первом узле B может использоваться для трех сот во втором узле B.
В одной схеме этапа 912 UE может обнаруживать основные сигналы синхронизации от сот в узлах B в пределах обнаруживаемого диапазона и может идентифицировать PSC-последовательность для каждой соты с помощью обнаруженного основного сигнала синхронизации. В одной схеме этапа 914 UE может обнаруживать дополнительный сигнал синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации и может идентифицировать SSC-последовательность для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации. UE может извлекать оценку канала для каждой соты с помощью обнаруженного основного сигнала синхронизации на основе обнаруженного основного сигнала синхронизации. UE затем может обнаруживать дополнительный сигнал синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации на основе оценки канала для этой соты. В одной схеме UE может извлекать оценку канала для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе обнаруженного дополнительного сигнала синхронизации. UE затем может демодулировать, по меньшей мере, один физический канал от каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе оценки канала для этой соты.
Фиг.10 показывает схему устройства 1000 для обнаружения сот в системе беспроводной связи. Устройство 1000 включает в себя модуль 1012, чтобы обнаруживать PSC-последовательности от сот в узлах B в пределах обнаруживаемого диапазона, модуль 1014, чтобы обнаруживать SSC-последовательности от сот с помощью обнаруженных PSC-последовательностей, и модуль 1016, чтобы идентифицировать обнаруженные соты на основе обнаруженных PSC-последовательностей и обнаруженных SSC-последовательностей.
Модули на фиг.8 и 10 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д. либо любую комбинацию вышеозначенного.
Специалисты в данной области техники должны понимать, что информация и сигналы могут быть представлены с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и символы шумоподобной последовательности, которые могут приводиться в качестве примера по всему описанию выше, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного.
Специалисты в данной области техники дополнительно должны принимать во внимание, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытием сущности, могут быть реализованы как электронные аппаратные средства, компьютерное программное обеспечение либо их комбинации. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы описаны выше, в общем, на основе их функциональности. Реализована эта функциональность в качестве аппаратных средств или программного обеспечения, зависит от конкретного варианта применения и структурных ограничений, накладываемых на систему в целом. Высококвалифицированные специалисты могут реализовывать описанную функциональность различными способами для каждого конкретного варианта применения, но такие решения по реализации не должны быть интерпретированы как являющиеся отступлением от объема настоящего раскрытия сущности.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытием сущности в данном документе, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем матричной БИС (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных компонентов аппаратных средств либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте процессором может быть любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как комбинация вычислительных устройств, к примеру, комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Этапы способа или алгоритма, описанные в связи с раскрытием сущности в данном документе, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение посредством процессора, либо в комбинации вышеозначенного. Программный модуль может постоянно размещаться в памяти типа RAM, флэш-памяти, памяти типа ROM, памяти типа EPROM, памяти типа EEPROM, в регистрах, на жестком диске, сменном диске, компакт-диске или любой другой форме носителя для хранения данных, известной в данной области техники. Типичный носитель для хранения данных соединен с процессором, причем процессор может считывать информацию и записывать информацию на носитель для хранения данных. В альтернативном варианте носитель для хранения данных может быть встроен в процессор. Процессор и носитель для хранения данных могут постоянно размещаться в ASIC. ASIC может постоянно размещаться в пользовательском терминале. В альтернативном варианте процессор и носитель для хранения данных могут постоянно размещаться как дискретные компоненты в пользовательском терминале.
В одной или более примерных схем описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммном обеспечении или любой комбинации вышеуказанного. Если реализованы в программном обеспечении, функции могут быть сохранены или переданы как одна или более инструкций или код на машиночитаемом носителе информации. Машиночитаемые носители информации включают в себя как компьютерные носители для хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы из одного места в другое. Носители для хранения данных могут быть любыми доступными носителями информации, к которым можно осуществлять доступ посредством компьютера общего назначения или специального назначения. В качестве примера, а не ограничения, эти машиночитаемые носители информации могут содержать RAM, ROM, EEPROM, CD-ROM или другое устройство хранения на оптических дисках, устройство хранения на магнитных дисках или другие магнитные устройства хранения либо любой другой носитель информации, который может быть использован для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера общего назначения или специального назначения либо процессора общего назначения или специального назначения. Так же любое подключение корректно называть машиночитаемым носителем информации. Например, если программное обеспечение передается с веб-узла, сервера или другого удаленного источника с помощью коаксиального кабеля, оптоволоконного кабеля, "витой пары", цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радиопередающие и микроволновые среды, то коаксиальный кабель, оптоволоконный кабель, "витая пара", DSL или беспроводные технологии, такие как инфракрасные, радиопередающие и микроволновые среды, включены в определение носителя информации. Диск (disk) и диск (disc) при использовании в данном документе включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск Blu-Ray, при этом диски (disk) обычно воспроизводят данные магнитно, тогда как диски (disc) обычно воспроизводят данные оптически с помощью лазеров. Комбинации вышеперечисленного также следует включать в число машиночитаемых носителей информации.
Предшествующее описание раскрытия сущности предоставлено для того, чтобы давать возможность любому специалисту в данной области техники создавать или использовать раскрытие сущности. Различные модификации в раскрытие сущности должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам без отступления от сущности и объема раскрытия сущности. Таким образом, раскрытие сущности не имеет намерение быть ограниченным описанными в данном документе примерами и схемами, а должно удовлетворять самому широкому объему, согласованному с принципами и новыми функциями, раскрытыми в данном документе.



Изобретение относится к радиосвязи, в частности к технологиям синхронизации в системе беспроводной связи. Технический результат - повышение производительности обнаружения сот для UE. Описываются технологии для назначения последовательностей основного кода синхронизации (PSC) и последовательностей дополнительного кода синхронизации (SSC) сотам в системе беспроводной связи. По меньшей мере, одна PSC-последовательность и несколько SSC-последовательностей могут использоваться для нескольких сот в узле В. В одной схеме доступные SSC-последовательности в системе могут компоноваться в группы, при этом каждая группа включает в себя М различных SSC-последовательностей. Дополнительные группы из М SSC-последовательностей могут формироваться с помощью различных перестановок (к примеру различных циклических сдвигов) каждой группы из М SSC-последовательностей. В одной схеме три SSC-последовательности SSC(G1), SSC(G2) и SSC(G3) могут использоваться для трех сот в одном узле В. Первая перестановка, включающая в себя SSC(G3), SSC(G1) и SSC(G2), может использоваться для трех сот в другом узле В. Вторая перестановка, включающая в себя SSC(G2), SSC(G3) и SSC(G1), может использоваться для трех сот в еще одном узле В. 6 н. и 31 з.п. ф-лы, 10, ил.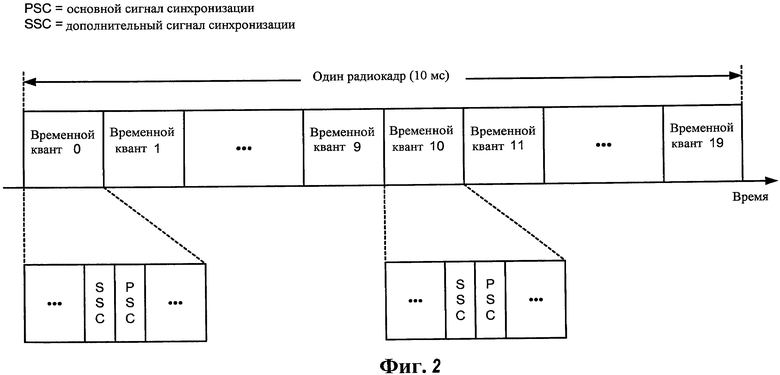
1. Способ передачи сигналов синхронизации в системе беспроводной связи, содержащий этапы, на которых
используют, по меньшей мере, одну последовательность основного кода синхронизации (PSC) для нескольких сот в первом узле В; и
используют несколько последовательностей дополнительного кода синхронизации (SSC) для нескольких сот в первом узле В, и
при этом используют отличающуюся перестановку нескольких SSC-последовательностей для нескольких сот во втором узле В.
2. Способ по п.1, дополнительно содержащий этап, на котором:
определяют PSC-последовательность и SSC-последовательность для каждой соты в первом узле В на основе идентификационных данных (идентификатора) соты.
3. Способ по п.1, в котором нескольким сотам в первом узле В и нескольким сотам во втором узле В назначают различные идентификационные данные (идентификаторы) соты, и в котором используют отличающуюся комбинацию PSC-последовательности и SSC-последовательности для каждой соты в первом и втором узлах В.
4. Способ по п.1, дополнительно содержащий этапы, на которых
формируют основной сигнал синхронизации для каждой соты в первом узле В на основе PSC-последовательности для соты; и
формируют дополнительный сигнал синхронизации для каждой соты в первом узле В на основе SSC-последовательности для соты.
5. Способ по п.1, в котором использование, по меньшей мере, одной PSC-последовательности для нескольких сот в первом узле В содержит этап, на котором используют различные PSC-последовательности для соседних сот в первом узле В.
6. Способ по п.1, в котором использование, по меньшей мере, одной PSC-последовательности для нескольких сот в первом узле В содержит этап, на котором используют одну PSC-последовательность для всех из нескольких сот в первом узле В.
7. Способ по п.1, в котором использование, по меньшей мере, одной PSC-последовательности для нескольких сот в первом узле В содержит этап, на котором используют отличающуюся PSC-последовательность для каждой из нескольких сот в первом узле В.
8. Способ по п.1, в котором использование нескольких SSC-последовательностей для нескольких сот в первом узле В содержит этап, на котором используют отличающуюся SSC-последовательность для каждой из нескольких сот в первом узле В.
9. Способ по п.1, в котором SSC-последовательности, доступные в системе, компонуют во множество исходных групп из М SSC-последовательностей, при этом дополнительные группы из М SSC-последовательностей формируют на основе различных перестановок каждой исходной группы из М SSC-последовательностей, и при этом сотам в каждом узле В назначают одну группу из М SSC-последовательностей, где М - это целое число, больше единицы.
10. Способ по п.9, в котором дополнительные группы из М SSC-последовательностей формируют на основе различных циклических сдвигов каждой исходной группы из М SSC-последовательностей.
11. Способ по п.1, в котором использование, по меньшей мере, одной PSC-последовательности для нескольких сот в первом узле В содержит этап, на котором используют три PSC-последовательности для трех сот в первом узле В, при этом использование нескольких SSC-последовательностей для нескольких сот в первом узле В содержит этап, на котором используют три SSC-последовательности для трех сот в первом узле В, и при этом перестановку трех SSC-последовательностей используют для трех сот во втором узле В.
12. Способ по п.1, в котором использование нескольких SSC-последовательностей для нескольких сот в первом узле В содержит этап, на котором используют три SSC-последовательности SSC(G1), SSC(G2) и SSC(G3) для трех сот 1, 2 и 3 соответственно в первом узле В, где G1, G2 и G3 - это индексы трех SSC-последовательностей, и в котором первую перестановку, содержащую SSC(G3), SSC(G1) и SSC(G2), или вторую перестановку, содержащую SSC(G2), SSC(G3) и SSC(G1), используют для трех сот 1, 2 и 3 соответственно во втором узле В.
13. Способ по п.1, в котором несколько SSC-последовательностей ассоциируют вместе и используют для того, чтобы идентифицировать соты, принадлежащие одному узлу В.
14. Способ по п.1, в котором первый и второй узлы В разнесены так, что соты самое большее от одного из первого и второго узлов В являются обнаруживаемыми посредством любого абонентского устройства (UE) в системе.
15. Устройство для передачи сигналов синхронизации в системе беспроводной связи, содержащее,
по меньшей мере, один процессор, выполненный с возможностью использования, по меньшей мере, одной последовательности основного кода синхронизации (PSC) для нескольких сот в первом узле В и использования нескольких последовательностей дополнительного кода синхронизации (SSC) для нескольких сот в первом узле В, и при этом отличающаяся перестановка нескольких SSC-последовательностей используется для нескольких сот во втором узле В.
16. Устройство по п.15, в котором нескольким сотам в первом узле В и нескольким сотам во втором узле В назначаются различные идентификационные данные (идентификаторы) соты, и в котором отличающаяся комбинация PSC-последовательности и SSC-последовательности используется для каждой соты в первом и втором узлах В.
17. Устройство по п.15, в котором, по меньшей мере, один процессор выполнен с возможностью использования отличающейся SSC-последовательности для каждой из нескольких сот в первом узле В.
18. Устройство по п.15, в котором, по меньшей мере, один процессор выполнен с возможностью использования трех SSC-последовательностей SSC(G1), SSC(G2) и SSC(G3) для трех сот 1, 2 и 3 соответственно в первом узле В, где G1, G2 и G3 - это индексы этих трех SSC-последовательностей, и в котором первая перестановка, содержащая SSC(G3), SSC(G1) и SSC(G2), или вторая перестановка, содержащая SSC(G2), SSC(G3) и SSC(G1), используется для трех сот 1, 2 и 3 соответственно во втором узле В.
19. Устройство для передачи сигналов синхронизации в системе беспроводной связи, содержащее
средство для использования, по меньшей мере, одной последовательности основного кода синхронизации (PSC) для нескольких сот в первом узле В и
средство для использования нескольких последовательностей дополнительного кода синхронизации (SSC) для нескольких сот в первом узле В, при этом отличающаяся перестановка нескольких SSC-последовательностей используется для нескольких сот во втором узле В.
20. Устройство по п.19, в котором нескольким сотам в первом узле В и нескольким сотам во втором узле В назначаются различные идентификационные данные (идентификаторы) соты, и в котором отличающаяся комбинация PSC-последовательности и SSC-последовательности используется для каждой соты в первом и втором узлах В.
21. Устройство по п.19, в котором средство для использования нескольких SSC-последовательностей для нескольких сот в первом узле В содержит средство для использования отличающейся SSC-последовательности для каждой из нескольких сот в первом узле В.
22. Устройство по п.19, в котором средство для использования нескольких SSC-последовательностей для нескольких сот в первом узле В содержит средство для использования трех SSC-последовательностей SSC(G1), SSC(G2) и SSC(G3) для трех сот 1, 2 и 3 соответственно в первом узле В, где G1, G2 и G3 - это индексы трех SSC-последовательностей, и в котором первая перестановка, содержащая SSC(G3), SSC(G1) и SSC(G2), или вторая перестановка, содержащая SSC(G2), SSC(G3) и SSC(G1), используется для трех сот 1, 2 и 3 соответственно во втором узле В.
23. Машиночитаемый носитель информации, содержащий коды, сохраненные на нем, и при исполнении в процессоре предписывающие процессору выполнять способ передачи сигналов синхронизации в системе беспроводной связи, причем упомянутые коды содержат
код для инструктирования, по меньшей мере, одному компьютеру использовать, по меньшей мере, одну последовательность основного кода синхронизации (PSC) для нескольких сот в первом узле В; и
код для инструктирования, по меньшей мере, одному компьютеру использовать несколько последовательностей дополнительного кода синхронизации (SSC) для нескольких сот в первом узле В, при этом отличающаяся перестановка нескольких SSC-последовательностей используется для нескольких сот во втором узле В.
24. Способ обнаружения сот в системе беспроводной связи, содержащий этапы, на которых
обнаруживают последовательности основного кода синхронизации (PSC) от сот в узлах В в пределах обнаруживаемого диапазона, причем каждый узел В содержит несколько сот, при этом несколько сот в каждом узле В используют, по меньшей мере, одну PSC-последовательность;
обнаруживают последовательности дополнительного кода синхронизации (SSC) от сот с помощью обнаруженных PSC-последовательностей, причем несколько сот в каждом узле В используют отличающуюся группу из нескольких SSC-последовательностей, и при этом перестановку группы из нескольких SSC-последовательностей для нескольких сот в первом узле В в пределах обнаруживаемого диапазона используют для нескольких сот во втором узле В вне обнаруживаемого диапазона; и
идентифицируют обнаруженные соты на основе обнаруженных PSC-последовательностей и обнаруженных SSC-последовательностей.
25. Способ по п.24, дополнительно содержащий этап, на котором
определяют идентификационные данные (идентификатор) соты для каждой обнаруженной соты на основе обнаруженной PSC-последовательности и обнаруженной SSC-последовательности для соты.
26. Способ по п.24, дополнительно содержащий этап, на котором
идентифицируют обнаруженные соты в одном узле В на основе отличающейся группы из нескольких SSC-последовательностей, используемых для нескольких сот в каждом узле В.
27. Способ по п.24, в котором обнаружение PSC-последовательностей содержит этап, на котором обнаруживают, по меньшей мере, одну PSC-последовательность от трех сот в каждом узле В в пределах обнаруживаемого диапазона, в котором обнаружение SSC-последовательностей содержит этап, на котором обнаруживают SSC-последовательности от сот с помощью обнаруженных PSC-последовательностей, причем эти три соты в каждом узле В используют отличающуюся группу из трех SSC-последовательностей, и при этом перестановку группы из трех SSC- последовательностей для трех сот в первом узле В используют для трех сот во втором узле В.
28. Способ по п.24, в котором обнаружение PSC-последовательностей от сот в узлах В в пределах обнаруживаемого диапазона содержит этапы, на которых
обнаруживают основные сигналы синхронизации от сот в узлах В в пределах обнаруживаемого диапазона, и
идентифицируют PSC-последовательность для каждой соты с помощью обнаруженного основного сигнала синхронизации.
29. Способ по п.28, в котором обнаружение SSC-последовательностей от сот с помощью обнаруженных PSC-последовательностей дополнительно содержит этапы, на которых
извлекают оценку канала для каждой соты с помощью обнаруженного основного сигнала синхронизации на основе обнаруженного основного сигнала синхронизации и
обнаруживают дополнительный сигнал синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации на основе оценки канала для соты.
30. Способ по п.28, в котором обнаружение SSC-последовательностей от сот с помощью обнаруженных PSC-последовательностей содержит этапы, на которых
обнаруживают дополнительный сигнал синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации и
идентифицируют SSC-последовательность для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации.
31. Способ по п.30, дополнительно содержащий этапы, на которых извлекают оценку канала для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе обнаруженного дополнительного сигнала синхронизации; и
демодулируют, по меньшей мере, один физический канал от каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе оценки канала для соты.
32. Устройство для обнаружения сот в системе беспроводной связи, содержащее,
по меньшей мере, один процессор, выполненный с возможностью обнаружения последовательностей основного кода синхронизации (PSC) от сот в узлах В в пределах обнаруживаемого диапазона, обнаружения последовательностей дополнительного кода синхронизации (SSC) от сот с помощью обнаруженных PSC-последовательностей и идентифицирования обнаруженных сот на основе обнаруженных PSC-последовательностей и обнаруженных SSC-последовательностей, при этом каждый узел В содержит несколько сот, причем несколько сот в каждом узле В используют, по меньшей мере, одну PSC-последовательность и отличающуюся группу из нескольких SSC-последовательностей, и при этом перестановка группы из нескольких SSC-последовательностей для нескольких сот в первом узле В в пределах обнаруживаемого диапазона используется для нескольких сот во втором узле В вне обнаруживаемого диапазона.
33. Устройство по п.32, в котором, по меньшей мере, один процессор выполнен с возможностью обнаружения, по меньшей мере, одной PSC-последовательности от трех сот в каждом узле В в пределах обнаруживаемого диапазона и обнаружения SSC-последовательности от сот с помощью обнаруженных PSC-последовательностей, причем эти три соты в каждом узле В используют отличающуюся группу из трех SSC-последовательностей, и при этом перестановка группы из трех SSC-последовательностей для трех сот в первом узле В используется для трех сот во втором узле В.
34. Устройство по п.32, в котором, по меньшей мере, один процессор выполнен с возможностью обнаружения основных сигналов синхронизации от сот в узлах В в пределах обнаруживаемого диапазона и идентифицирования PSC-последовательности для каждой соты с помощью обнаруженного основного сигнала синхронизации.
35. Устройство по п.34, в котором, по меньшей мере, один процессор выполнен с возможностью извлечения оценки канала для каждой соты с помощью обнаруженного основного сигнала синхронизации на основе обнаруженного основного сигнала синхронизации и обнаружения дополнительного сигнала синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации на основе оценки канала для соты.
36. Устройство по п.34, в котором, по меньшей мере, один процессор выполнен с возможностью обнаружения дополнительного сигнала синхронизации от каждой соты с помощью обнаруженного основного сигнала синхронизации и идентифицирования SSC-последовательности для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации.
37. Устройство по п.36, в котором, по меньшей мере, один процессор выполнен с возможностью извлечения оценки канала для каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе обнаруженного дополнительного сигнала синхронизации и демодулирования, по меньшей мере, одного физического канала от каждой соты с помощью обнаруженного дополнительного сигнала синхронизации на основе оценки канала для соты.
| US 6504830 B1, 07.01.2003 | |||
| БЫСТРОЕ ОБНАРУЖЕНИЕ И СИНХРОНИЗАЦИЯ СИГНАЛА ДЛЯ ПЕРЕДАЧ ДОСТУПА | 1998 |
|
RU2236088C2 |
| US 6272335 B1, 07.08.2001 | |||
| US 6134286 A, 17.10.2000 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

