Настоящая заявка испрашивает приоритет предварительной заявки на патент США № 60/953971, озаглавленной "TIMING SEARCH METHOD FOR E-UTRAN", поданной 3 августа 2007 года, переданной правопреемнику этой заявки и содержащейся в данном документе по ссылке.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее раскрытие, в общем, относится к связи, а более конкретно к технологиям для определения временной привязки соты в системе беспроводной связи.
Уровень техники
Системы беспроводной связи широко развернуты для того, чтобы предоставлять различное содержимое связи, например передачу речи, видео, пакетных данных, обмен сообщениями, широковещательную передачу и т.д. Эти беспроводные системы могут быть системами множественного доступа, допускающими поддержку множественных пользователей посредством совместного использования доступных системных ресурсов. Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы с ортогональным FDMA (OFDMA) и системы FDMA с одной несущей (SC-FDMA).
Система беспроводной связи может включать в себя определенное число сот, которые могут поддерживать связь для определенного числа абонентских устройств (UE). UE может принимать передачу от соты. Передача может проходить через один или более трактов передачи сигналов, которые могут включать в себя тракт передачи прямых сигналов от соты к UE, а также тракты передачи отраженных сигналов, формируемые посредством различных структур в окружении. Различные тракты передачи сигналов типично имеют различные канальные усиления и задержки на распространение. Канальное усиление и/или задержка каждого тракта передачи сигналов может изменяться вследствие различных факторов, таких как мобильность UE, изменения в окружении и т.д. Кроме того, новые тракты передачи сигналов могут быть сформированы, и существующие тракты передачи сигналов могут исчезать вследствие этих факторов. Может быть желательным определять временную привязку соты так, что интенсивные тракты передачи сигналов могут захватываться, и передача от соты может надежно приниматься.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технологии для определения временной привязки соты (к примеру, обслуживающей соты) в системе беспроводной связи описаны в данном документе. В аспекте, UE может выполнять поиски временной привязки соты на основе, по меньшей мере, одного сигнала синхронизации, сформированного на основе идентификатора (ID) соты. UE может получать принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации. UE может знать идентификатор соты и может локально формировать, по меньшей мере, один сигнал синхронизации. UE может коррелировать принимаемые выборки, по меньшей мере, с одним локально формируемым сигналом синхронизации во временной области с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки в окне поиска. UE затем может определять временную привязку соты на основе энергий для множественных гипотез временной привязки.
В одной схеме UE может идентифицировать, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки. Каждый обнаруженный пик может соответствовать различной гипотезе временной привязки. UE может обновлять набор предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика. UE может ассоциировать, по меньшей мере, один обнаруженный пик с предполагаемыми пиками и может обновлять интенсивность сигнала и временную привязку каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется. UE может добавлять каждый обнаруженный пик, не ассоциированный ни с одним из предполагаемых пиков, к набору предполагаемых пиков. UE также может удалять предполагаемый пик из набора предполагаемых пиков, если, по меньшей мере, один критерий удовлетворен.
UE может идентифицировать предполагаемый пик с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика. UE может предоставлять временную привязку идентифицированного предполагаемого пика в качестве временной привязки соты. UE может обновлять временную привязку соты с небольшими временными регулированиями, определенными на основе контура отслеживания времени. UE может обновлять временную привязку соты с большими регулированиями временной привязки, определенными на основе энергий для множественных гипотез временной привязки, полученных из поисков временной привязки. UE может обновлять размещение окна поиска каждый раз, когда временная привязка соты обновляется с большим регулированием временной привязки.
Далее более подробно описаны различные аспекты и признаки изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует систему беспроводной связи.
Фиг.2 показывает передачу основных и вторичных сигналов синхронизации.
Фиг.3 показывает формирование вторичного сигнала синхронизации для соты.
Фиг.4 показывает корреляцию с вторичным сигналом синхронизации.
Фиг.5 показывает накопление энергий, чтобы получать обрабатываемые методом окна энергии.
Фиг.6 показывает обработку для того, чтобы определять и обновлять временную привязку соты.
Фиг.7 и 8 показывают процесс для определения временной привязки соты.
Фиг.9 показывает устройство для определения временной привязки соты.
Фиг.10 иллюстрирует блок-схему узла B и UE.
Фиг.11 иллюстрирует блок-схему процессора временной привязки в UE.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Технологии, описанные в данном документе, могут использоваться для различных систем беспроводной связи, таких как системы CDMA, TDMA, FDMA, OFDMA, SC-FDMA и другие системы. Термины "система" и "сеть" зачастую используются взаимозаменяемо. CDMA-система может реализовывать такую технологию радиосвязи, как универсальный наземный радиодоступ (UTRA), cdma2000 и т.д. UTRA включает в себя широкополосную CDMA (WCDMA) и другие варианты CDMA. Cdma2000 покрывает стандарты IS-2000, IS-95 и IS-856. TDMA-система может реализовывать такую технологию радиосвязи, как глобальная система мобильной связи (GSM). OFDMA-система может реализовывать такую технологию радиосвязи, как усовершенствованный UTRA (E-UTRA), сверхширокополосная передача для мобильных устройств (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA и E-UTRA являются частью универсальной системы мобильной связи (UMTS). Стандарт долгосрочного развития (LTE) 3GPP является планируемой к выпуску версией UMTS, которая использует E-UTRA, которая применяет OFDMA в нисходящей линии связи и SC-FDMA в восходящей линии связи. UTRA, E-UTRA, UMTS, LTE и GSM описаны в документах организации, называемой Партнерским проектом третьего поколения (3GPP). Cdma2000 и UMB описаны в документах организации, называемой Партнерским проектом третьего поколения 2 (3GPP2). Для простоты определенные аспекты технологий описаны ниже для LTE, и терминология LTE используется в большей части нижеприведенного описания.
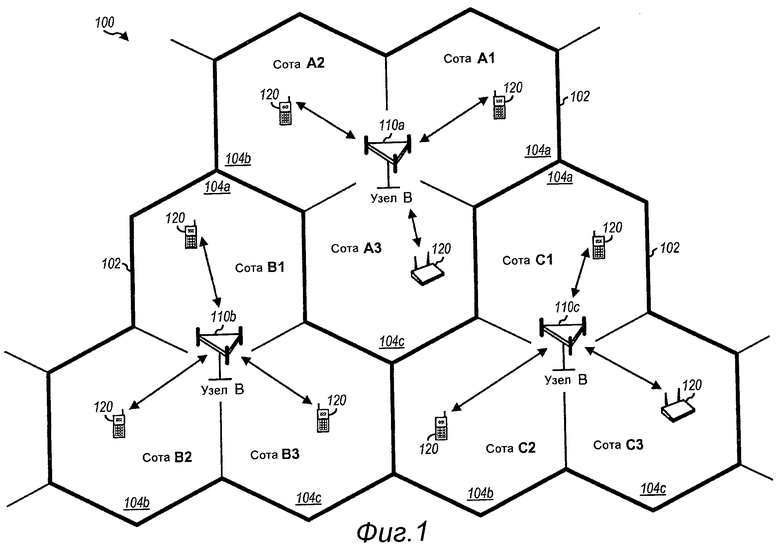
Фиг.1 показывает систему 100 беспроводной связи, которая может быть LTE-системой. Система 100 может включать в себя определенное число узлов B и других сетевых объектов. Для простоты, только три узла B 110a, 110b и 110c показаны на фиг.1. Узел B может быть стационарной станцией, которая осуществляет связь с UE, и также может упоминаться как усовершенствованный узел B (eNB), базовая станция, точка доступа и т.д. Каждый узел B 110 предоставляет покрытие связи для конкретной географической области 102. Чтобы повышать пропускную способность системы, полная зона покрытия узла B может быть секционирована на множество меньших зон, к примеру, три меньших зоны 104a, 104b и 104c. Каждая меньшая зона может обслуживаться посредством соответствующей подсистемы узла B. В 3GPP термин "сота" может упоминаться как наименьшая зона покрытия узла B и/или подсистемы узла B, обслуживающей эту зону покрытия. В 3GPP2 термин "сектор" может упоминаться как наименьшая зона покрытия базовой станции и/или подсистемы базовой станции, обслуживающей эту зону покрытия. Для простоты, понятие соты из 3GPP используется в описании ниже.
В примере, показанном на фиг.1, каждый узел B 110 имеет три соты, которые покрывают различные географические области. Для простоты, фиг.1 показывает соты, не перекрывающие друг друга. В практическом развертывании соседние соты типично перекрывают друг друга на границах, что позволяет обеспечивать то, что UE может находиться в рамках покрытия одной или более сот в любом местоположении по мере того, как UE перемещается по системе.
UE 120 могут быть распределены по системе, и каждое UE может быть стационарным или мобильным. UE также может упоминаться как мобильная станция, терминал, терминал доступа, абонентское устройство, станция и т.д. UE может быть сотовый телефон, персональное цифровое устройство (PDA), беспроводной модем, устройство беспроводной связи, карманное устройство, портативный компьютер, беспроводной телефон и т.д. UE может осуществлять связь с узлом B через нисходящую линию связи и восходящую линию связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от узлов B к UE, а восходящая линия связи (или обратная линия связи) относится к линии связи от UE к узлам B.
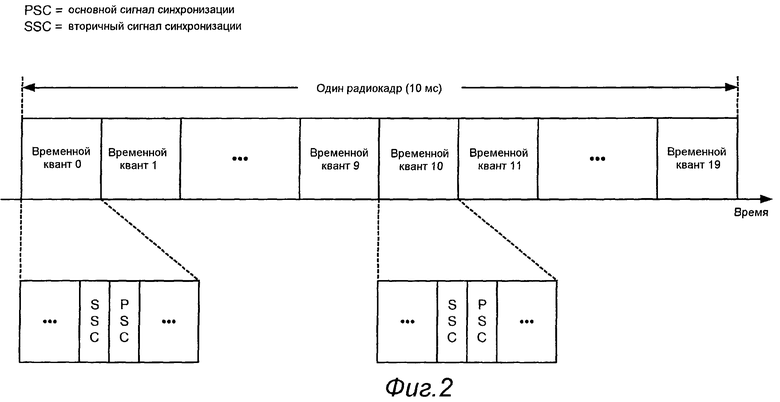
В системе 100 каждый узел B 110 может периодически передавать основной сигнал синхронизации и вторичный сигнал синхронизации для каждой соты в этом узле B. Основной сигнал синхронизации также может упоминаться как основной канал синхронизации (P-SCH). Вторичный сигнал синхронизации также может упоминаться как вторичный канал синхронизации (S-SCH). Основные и вторичные сигналы синхронизации также могут упоминаться под другими названиями. UE может использовать основные и вторичные сигналы синхронизации для того, чтобы обнаруживать соты, определять временную привязку и частотное смещение обнаруженных сот и т.д.
Фиг.2 показывает примерную передачу основных и вторичных сигналов синхронизации для одной соты. Временная шкала передачи для нисходящей линии связи может быть секционирована на единицы радиокадров. Каждый радиокадр может иметь заранее определенную длительность (к примеру, 10 миллисекунд (мс)) и может быть секционирован на 20 временных квантов с индексами от 0 до 19. Каждый временной квант может покрывать фиксированное или конфигурируемое число периодов символа, к примеру, шесть или семь периодов символа. В схеме, показанной на фиг.2, основные и вторичные сигналы синхронизации отправляют в двух периодах символа в каждом из временных квантов 0 и 10 каждого радиокадра. В общем, основные и вторичные сигналы синхронизации могут быть отправлены с любой частотой, к примеру, любое количество раз в каждом радиокадре. Вторичный сигнал синхронизации может быть отправлен рядом (к примеру, непосредственно перед или после) с основным сигналом синхронизации, так что оценка канала может быть извлечена из основного сигнала синхронизации и использоваться для когерентного обнаружения вторичного сигнала синхронизации.
Каждой соте может назначаться идентификатор соты, который является уникальным среди всех сот в рамках определенного диапазона этой соты. Эта схема назначения идентификаторов сот может давать возможность каждому UE уникально идентифицировать все соты, обнаруживаемые посредством этого UE, независимо от местоположения UE. Система может поддерживать набор идентификаторов сот. Каждой соте может назначаться конкретный идентификатор соты из набора идентификаторов сот, поддерживаемых посредством системы.
В одной схеме набор из 504 уникальных идентификаторов соты может поддерживаться посредством системы. 504 идентификатора соты могут быть сгруппированы в 168 уникальных групп идентификаторов сот, и каждая группа идентификаторов сот может содержать три уникальных идентификатора соты. Группировка может осуществляться так, что каждый идентификатор соты включают только в одну группу идентификаторов сот. Идентификатор соты может быть выражен следующим образом:
CID=3·GID+NID
 уравнение (1),
уравнение (1),
где CID  {0,..., 503} является идентификатором соты,
{0,..., 503} является идентификатором соты,
GID  {0,..., 167} является индексом группы идентификаторов сот, которой принадлежит идентификатор соты,
{0,..., 167} является индексом группы идентификаторов сот, которой принадлежит идентификатор соты,
а NID {0, 1, 2} является индексом конкретного идентификатора в рамках группы идентификаторов сот.
В схеме, показанной в уравнении (1), идентификатор соты уникально задан (i) посредством первого числа в рамках диапазона от 0 до 167, представляющего группу идентификаторов сот, и (ii) второго числа в рамках диапазона от 0 до 2, представляющего идентификатор в группе идентификаторов сот. В общем, любое число идентификаторов сот может поддерживаться, идентификаторы сот могут группироваться в любое число групп, и каждая группа может включать в себя любое число идентификаторов сот. Для понятности, большая часть нижеприведенного описания приводится для схемы, описанной выше, всего с 504 идентификаторами сот, 168 группами идентификаторов сот и 3 идентификаторами сот в каждой группе.
Три последовательности основных кодов синхронизации (PSC) могут быть заданы для трех возможных значений NID для трех идентификаторов сот в каждой группе. Помимо этого, 168 последовательностей вторичных кодов синхронизации (SSC) могут быть заданы для 168 возможных значений GID для 168 возможных групп идентификаторов сот. PSC- и SSC-последовательности могут быть сформированы по-разному.
В одной схеме PSC-последовательность может быть сформирована на основе последовательности Задова-Чу следующим образом:
где u - это индекс корня, определенный посредством NID, и
dPSC(n) - это PSC-последовательность, причем n является индексом символа.
Различные PSC-последовательности могут быть сформированы с различными индексами u для последовательности Задова-Чу, причем u определяется посредством NID. Например, u может быть равным 25, 29 и 34 для NID 0, 1 и 2, соответственно. В схеме, показанной в уравнении (2), PSC-последовательность включает в себя только часть NID (и не включает в себя часть GID) идентификатора соты.
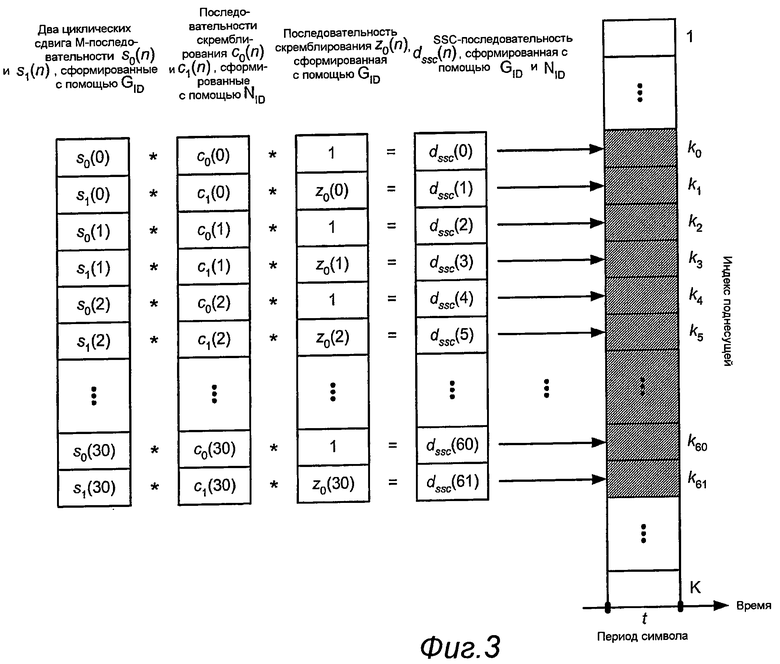
В одной схеме SSC-последовательность может быть сформирована на основе последовательности максимальной длины (M-последовательности) следующим образом:


где s0(n) и s1(n) являются двумя циклическими сдвигами M-последовательности и формируются на основе GID,
c0(n) и c1(n) являются двумя последовательностями скремблирования, сформированными на основе NID,
z0(n) и z1(n) являются двумя последовательностями скремблирования, сформированными на основе GID,
а dSSC(n) является SSC-последовательностью.
В схеме, показанной в наборе уравнений (3), два циклических сдвига M-последовательности перемежают и скремблируют, чтобы формировать SSC-последовательность. SSC-последовательность для временного кванта 0 формируют отлично от SSC-последовательности для временного кванта 10. Различные SSC-последовательности могут быть сформированы с различными циклическими сдвигами M-последовательности, при этом циклические сдвиги определяют посредством GID. SSC-последовательности также могут быть скремблированы с различными последовательностями скремблирования, сформированными на основе NID. В схеме, показанной в наборе уравнений (3), SSC-последовательность включает в себя части GID и NID идентификатора соты и таким образом является уникальной для каждой соты, обнаруживаемой посредством UE.
Формирование PSC- и SSC-последовательностей в LTE описывается в документе 3GPP TS 36.211, озаглавленном "Расширенный универсальный наземный радиодоступ; Физические каналы и модуляция (Выпуск 8)" ("Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation (Release 8)"), который находится в свободном доступе. PSC- и SSC-последовательности также могут быть сформированы другими способами.
LTE использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) в нисходящей линии связи. OFDM секционирует системную полосу пропускания на множество (K) ортогональных поднесущих, которые также, в общем, называются тонами, элементарными сигналами и т.д. Каждая поднесущая может быть модулирована с помощью данных. Разнесение между соседними поднесущими может быть фиксированным, и общее число поднесущих (K) может зависеть от полосы пропускания системы. Например, K может быть равным 128, 256, 512, 1024 или 2048 для полосы пропускания системы в 1,25, 2,5, 5, 10 или 20 МГц, соответственно.
Фиг.3 показывает схему формирования вторичного сигнала синхронизации для соты для временного кванта 0. Два циклических сдвига M-последовательности s0(n) и s1(n) могут быть сформированы на основе GID идентификатора соты и могут перемежаться. Две последовательности скремблирования c0(n) и c1(n) могут быть сформированы на основе NID идентификатора соты и могут быть перемежены. Последовательность скремблирования z0(n) может быть сформирована на основе GID идентификатора соты и перемежена с последовательностью из всех единиц. SSC-последовательность dSSC(n) может быть сформирована посредством умножения перемеженных последовательностей s0(n) и s1(n), перемеженных последовательностей скремблирования c0(n) и c1(n) и перемеженной последовательности скремблирования z0(n) на посимвольной основе.
Чтобы формировать OFDM-символ для вторичного сигнала синхронизации, 62 символа для SSC-последовательности могут быть отображены в 62 поднесущие с индексами k0-k61, используемые для передачи вторичного сигнала синхронизации. Нулевые символы с нулевыми значениями сигнала и/или другие символы могут быть отображены в оставшиеся поднесущие, не используемые для вторичного сигнала синхронизации. Всего K символов для всего K поднесущих может быть преобразовано с помощью K-точечного обратного быстрого преобразования Фурье (IFFT), чтобы получать полезную часть, содержащую K выборок временной области. Последние C выборок полезной части могут быть скопированы и добавлены к началу полезной части, чтобы формировать OFDM-символ, содержащий K+C выборок. Скопированная часть обычно упоминается как циклический префикс и используется для того, чтобы противостоять межсимвольным помехам (ISI), вызываемым посредством частотно-избирательного затухания. C - это длина циклического префикса, и она может выбираться на основе ожидаемого разброса задержек в системе. LTE поддерживает обычный циклический префикс с номинальным значением C и расширенный циклический префикс с более большим значением C. Временной квант может включать в себя семь периодов символа для обычного циклического префикса или шесть периодов символа для расширенного циклического префикса. OFDM-символ, содержащий вторичный сигнал синхронизации, может отправляться в одном периоде символа временного кванта.
UE может выполнять поиск сот на основе основных и вторичных сигналов синхронизации, передаваемых посредством этих сот. Для поиска сот UE может сначала обнаруживать основные сигналы синхронизации от сот. UE может получать NID и символьную временную привязку для каждой соты с помощью обнаруженного основного сигнала синхронизации. UE затем может обнаруживать вторичный сигнал синхронизации от каждой обнаруженной соты. UE может получать GID и кадровую временную привязку для каждой соты с помощью обнаруженного вторичного сигнала синхронизации.
UE может работать в подключенном режиме и может осуществлять связь с обслуживающей сотой. Эта обслуживающая сота может быть сотой с наилучшим или хорошим качеством принимаемого сигнала в UE. В подключенном режиме UE может отслеживать временную привязку обслуживающей соты с помощью контура отслеживания времени (TTL). Этот контур отслеживания времени может периодически оценивать временную привязку сигнала (к примеру, основного и/или вторичного сигнала синхронизации), принимаемого от обслуживающей соты, и может обновлять временную привязку обслуживающей соты на основе оцененной временной привязки принимаемого сигнала. UE может получать поток принимаемых выборок. Временную привязку из контура отслеживания времени можно использовать для того, чтобы размещать FFT-окно, которое выбирает то, какие K принимаемых выборок следует использовать в каждый период символа.
Контур отслеживания времени может обновлять временную привязку обслуживающей соты в соответствии с фильтром контура, который предоставляет усреднение потенциально зашумленных оценок временной привязки от принимаемого сигнала. Контур отслеживания времени, таким образом, может быть неспособен реагировать на быстрые изменения во временной привязке обслуживающей соты.
В аспекте, UE может выполнять поиски временной привязки обслуживающей соты на основе вторичного сигнала синхронизации, который может быть сформирован на основе как GID, так NID идентификатора соты и таким образом может быть уникальным для обслуживающей соты. UE может знать GID и NID обслуживающей соты и затем может локально формировать вторичный сигнал синхронизации. UE может коррелировать принимаемые выборки с локально формируемым вторичным сигналом синхронизации во временной области с различными временными смещениями, чтобы обнаруживать пики достаточной интенсивности. UE затем может определять временную привязку обслуживающей соты на основе обнаруженных пиков.
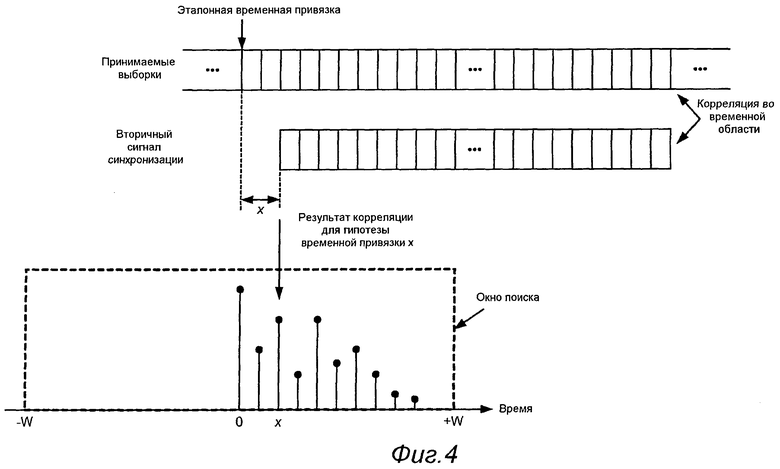
Фиг.4 показывает схему корреляции со вторичным сигналом синхронизации для поиска временной привязки. Принимаемые выборки временной области в UE показывают в верхней части фиг.4. Локально формируемый вторичный сигнал синхронизации показывается ниже принимаемых выборок с временным смещением x от эталонной временной привязки. Корреляция может выполняться для набора гипотез временной привязки, при этом каждая гипотеза временной привязки соответствует различной потенциальной временной привязке для обслуживающей соты. Каждая гипотеза временной привязки может быть задана посредством различного временного смещения от эталонной временной привязки, как показано на фиг.4 и допускается в нижеприведенном описании. Гипотезы временной привязки также могут быть заданы посредством абсолютного времени.
Принимаемые выборки могут быть коррелированы с локально формируемым вторичным сигналом синхронизации следующим образом:
где r(i) обозначает принятые выборки, причем i является примерным индексом во временной области,
s(i) обозначает локально формируемый вторичный сигнал синхронизации,
E(x) обозначает энергию для гипотезы временной привязки x,
а "*" обозначает комплексно-сопряженное число.
Принимаемые выборки могут быть коррелированы с локально формируемым вторичным сигналом синхронизации для различных гипотез временной привязки в окне поиска. Это окно поиска может покрывать диапазон от -W периодов дискретизации влево от эталонной временной привязки до +W периодов дискретизации вправо от эталонной временной привязки. В одной схеме окно поиска может покрывать диапазон от -1/2 длины циклического префикса до +1/2 длины циклического префикса. Гипотезы временной привязки могут быть разнесены на один период дискретизации или на какую-либо другую величину. Энергия, получаемая для каждой гипотезы временной привязки, может служить признаком энергии принимаемого сигнала для одного или более трактов передачи сигналов с задержкой на распространение, соответствующей этой гипотезе временной привязки. Энергии для различных гипотез временной привязки могут быть нанесены на график в зависимости от времени, как показано в нижней части фиг.4. Крайняя левая энергия может быть для первого тракта поступления (FAP), который может соответствовать тракту в зоне прямой видимости от обслуживающей соты к UE.
В другой схеме принимаемые выборки могут быть коррелированы с основным сигналом синхронизации, чтобы получать энергии для различных гипотез временной привязки. Основной сигнал синхронизации может не идентифицировать уникально обслуживающую соту, как описано выше. В этом случае энергии для интересующих гипотез временной привязки могут быть верифицированы посредством обнаружения вторичного сигнала синхронизации. В еще одной схеме принимаемые выборки могут быть коррелированы с основными и вторичным сигналом синхронизации, чтобы получать энергии для различных гипотез временной привязки. Дополнительная энергия может получаться посредством корреляции с обоими сигналами синхронизации. В общем, корреляция может выполняться с помощью одного или более сигналов синхронизации, формируемых на основе идентификатора соты и уникально идентифицирующих соту, временная привязка которой определяется.
В одной схеме энергии для различных гипотез временной привязки могут использоваться непосредственно в качестве интенсивности сигнала пиков. Каждый пик может формироваться посредством одного или более трактов передачи сигналов с конкретной задержкой на распространение. Каждый пик может быть задан посредством (i) интенсивности сигнала, определенной посредством энергии тракта(ов) передачи сигналов, формирующего этот пик, и (ii) временной привязки, соответствующей задержке на распространение тракта(ов) передачи сигналов, формирующего пик. В этой схеме энергия для каждой гипотезы временной привязки, получаемой из корреляции, может использоваться непосредственно в качестве интенсивности сигнала пика для этой гипотезы временной привязки.
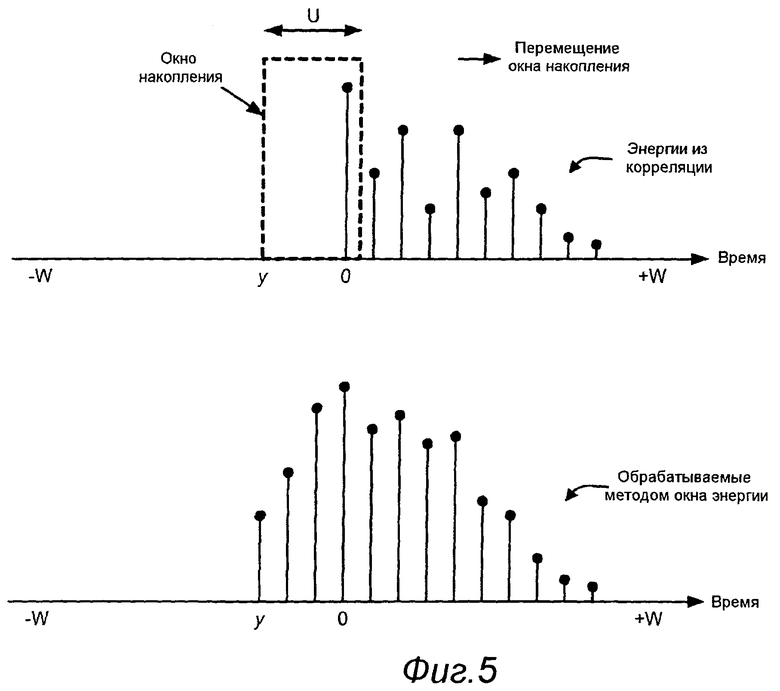
В другой схеме энергии для различных гипотез временной привязки могут накапливаться в течение окна накопления размера U. Окно накопления может быть помещено в различные исходные позиции, соответствующие различным гипотезам временной привязки. Энергии в окне накопления могут накапливаться для каждой исходной позиции, чтобы получать обрабатываемую методом окна энергию для соответствующей гипотезы временной привязки. Обрабатываемые методом окна энергии могут упоминаться как накопленные энергии и могут использоваться в качестве интенсивности сигнала пиков.
Фиг.5 показывает накопление энергий для различных гипотез временной привязки, чтобы получать обрабатываемые методом окна энергии. Набор энергий может получаться для диапазона гипотез временной привязки из корреляции, как описано выше для фиг.4. Окно накопления размера U может быть размещено, начиная с временного смещения y от эталонной временной привязки. Энергии в окне накопления могут накапливаться для того, чтобы получать обрабатываемую методом окна энергию для гипотезы временной привязки y.
Окно накопления может сдвигаться по диапазону временных смещений, к примеру, от -W до +W периодов дискретизации. Обрабатываемая методом окна энергия может вычисляться для каждого временного смещения и может служить признаком полной энергии принимаемого сигнала для всех трактов передачи сигналов с задержками на распространение, находящимися в окне накопления. Обрабатываемые методом окна энергии для различных гипотез временной привязки могут быть нанесены на график в зависимости от времени, как показано в нижней части фиг.5.
Накопление энергии может выполняться по-разному. В одной схеме все энергии в окне накопления могут накапливаться для того, чтобы получать обрабатываемую методом окна энергию. В другой схеме только энергии, превышающие пороговое значение SSEL выбора, могут накапливаться для того, чтобы получать обрабатываемую методом окна энергию. Пороговое значение выбора может задаваться так, что накапливаются только энергии трактов передачи сигналов с достаточной интенсивностью. В еще одной схеме может накапливаться заранее определенное число наибольших энергий в окне накопления. Накопление энергии также может выполняться другими способами.
UE может получать набор интенсивностей сигнала для набора пиков для различных гипотез временной привязки из корреляции и накопления энергии (если выполняется). Интенсивность сигнала каждого пика может быть равной (i) энергии для соответствующей гипотезы временной привязки, как показано на фиг.4, или (ii) обрабатываемой методом окна энергии для окна накопления, помещенного в эту гипотезу временной привязки, как показано на фиг.5. UE также может накапливать энергию или обрабатываемую методом окна энергию для каждой гипотезы временной привязки через NACC поисков временной привязки, чтобы получать интенсивность сигнала пика для этой гипотезы временной привязки, где NACC может составлять один или более.
В одной схеме UE может сравнивать интенсивность сигнала каждого пика с пороговым значением обнаружения. UE может сохранять каждый пик с интенсивностью сигнала, превышающей пороговое значение обнаружения, и может отбрасывать оставшиеся пики. В другой схеме UE может сохранять заранее определенное число интенсивных пиков с наибольшими интенсивностями сигнала и может отбрасывать оставшиеся пики. Для обеих схем сохраненные пики могут упоминаться как обнаруженные пики. UE может получать L обнаруженных пиков с интенсивностью сигнала S1-SL для гипотез временной привязки T1-TL, соответственно, где L может составлять один или более. Интенсивность сигнала Sℓ для ℓ-ого обнаруженного пика, где ℓ=1,..., L, может быть равна энергии для гипотезы временной привязки Tℓ (как показано на фиг.4) или обрабатываемой методом окна энергии для гипотезы временной привязки Tℓ (как показано на фиг.5). L обнаруженных пиков могут упорядочиваться по интенсивности своего сигнала так, что S1≥S2≥...≥SL.
UE может периодически выполнять поиски временной привязки (к примеру, раз в TSEARCH секунд) и может получать набор обнаруженных пиков из каждого поиска временной привязки. UE может фильтровать результаты поиска из различных поисков временной привязки, чтобы повышать точность измерения. UE может выполнять фильтрацию по-разному.
В одной схеме UE может сохранять предполагаемый набор, содержащий пики, которые обнаружены ранее посредством UE. Пики в предполагаемом наборе могут упоминаться как предполагаемые пики. Каждый предполагаемый пик может соответствовать различной потенциальной временной привязке для обслуживающей соты. Предполагаемый набор может быть инициализирован с обнаруженными пиками от первого поиска временной привязки, и интенсивность сигнала и временная привязка каждого обнаруженного пика может записываться. Интенсивность сигнала и временная привязка предполагаемых пиков после этого могут обновляться с интенсивностью сигнала и временной привязкой обнаруженных пиков. Интенсивные обнаруженные пики также могут добавляться к предполагаемому набору, а слабые предполагаемые пики могут удаляться из предполагаемого набора.
В начале данного поиска временной привязки предполагаемый набор может содержать M предполагаемых пиков, где M может составлять один или более. Каждый предполагаемый пик может быть ассоциирован с конкретной интенсивностью сигнала и конкретной временной привязкой. UE может выполнять поиск временной привязки и получать L обнаруженных пиков с интенсивностью сигнала S1-SL и временной привязкой T1-TL. UE может ассоциировать или сопоставлять L обнаруженных пиков из поиска временной привязки с M предполагаемых пиков в предполагаемом наборе. В одной схеме обнаруженный пик может быть ассоциирован с предполагаемым пиком, если разница временной привязки между двумя пиками меньше заранее определенного интервала ∆T времени. Интенсивность сигнала и временная привязка предполагаемого пика могут быть фильтрованы с помощью интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, чтобы получать обновленную интенсивность сигнала и временную привязку для предполагаемого пика.
В одной схеме временная привязка предполагаемого пика и временная привязка ассоциированного обнаруженного пика могут быть фильтрованы на основе фильтра с бесконечной импульсной характеристикой (IIR) следующим образом:

где Tavg,m(v) является временной привязкой m-ого предполагаемого пика после v-ого поиска временной привязки,
Tℓ(v) является временной привязкой ℓ-ого обнаруженного пика, ассоциированного с m-ным предполагаемым пиком, и
αT является коэффициентом, который определяет величину фильтрации.
В одной схеме интенсивность сигнала предполагаемого пика и интенсивность сигнала ассоциированного обнаруженного пика могут быть фильтрованы на основе IIR-фильтра следующим образом:

где Savg,m(v) является интенсивностью сигнала m-ого предполагаемого пика,
Sℓ(v) является интенсивностью сигнала ℓ-ого обнаруженного пика, и
αS является коэффициентом, который определяет величину фильтрации.
В уравнениях (5) и (6) большие значения αS и αT соответствуют большей величине фильтрации, и наоборот. αS может равняться или не равняться αT, в зависимости от требуемой величины среднего для интенсивности сигнала и временной привязки. Фильтрация также может выполняться на основе фильтра с конечной импульсной характеристикой (FIR) или некоторого другого типа фильтра.
Обнаруженный пик может находиться в пределах ∆T множественных предполагаемых пиков. В этом случае обнаруженный пик может быть ассоциирован с ближайшим предполагаемым пиком или наиболее интенсивным пиком из всех предполагаемых пиков в пределах ∆T обнаруженного пика или некоторым другим предполагаемым пиком. Обнаруженный пик может не находиться в пределах ∆T какого-либо предполагаемого пика. В этом случае обнаруженный пик может быть добавлен к предполагаемому набору.
Предполагаемый пик может быть удален из предполагаемого набора, если один или более критериев удовлетворены. В одной схеме предполагаемый пик может быть удален, если его интенсивность сигнала ниже порогового значения отбрасывания в течение заранее определенного интервала времени (к примеру, TDROP секунд). Таймер может сохраняться для предполагаемого пика с интенсивностью сигнала ниже порогового значения отбрасывания. Таймер может быть запущен, когда интенсивность сигнала падает ниже порогового значения отбрасывания. Предполагаемый пик может быть удален из предполагаемого набора, когда таймер истекает, что может указывать то, что интенсивность сигнала пика ниже порогового значения отбрасывания в течение TDROP секунд. Предполагаемый пик также может быть удален на основе других критериев.
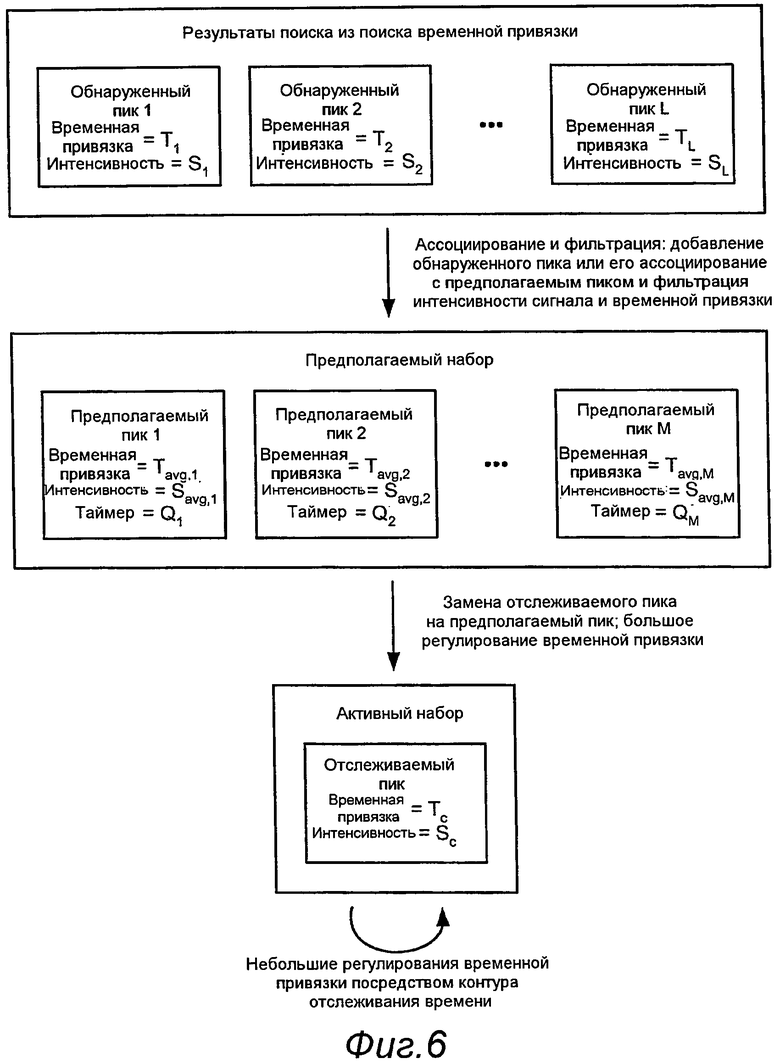
Фиг.6 показывает схему обработки, чтобы определять и обновлять временную привязку обслуживающей соты. UE может выполнять поиск временной привязки и может получать новые результаты поиска, содержащие L обнаруженных пиков с интенсивностью сигнала S1-SL и временной привязкой T1-TL, соответственно. L обнаруженных пиков могут быть сортированы от наиболее интенсивного до наиболее слабого.
UE может ассоциировать L обнаруженных пиков из поиска временной привязки с M предполагаемых пиков в предполагаемом наборе. UE может фильтровать интенсивность сигнала и временную привязку каждого предполагаемого пика с интенсивностью сигнала и временной привязкой ассоциированного обнаруженного пика, если имеется, к примеру, как показано в уравнениях (5) и (6). UE может добавлять обнаруженный пик к предполагаемому набору, если нет предполагаемых пиков в пределах ∆T обнаруженного пика. UE также может обновлять таймер для каждого предполагаемого пика с интенсивностью сигнала ниже порогового значения отбрасывания. После завершения обновления UE может получать M предполагаемых пиков с интенсивностью сигнала Savg,1-Savg,M, временной привязкой Tavg,1-Tavg,M и значениями таймера Q1-QM. Значение таймера для каждого предполагаемого пика может передавать количество времени, в течение которого интенсивность сигнала для этого пика ниже порогового значения отбрасывания. UE может удалять предполагаемый пик, когда таймер для этого пика истекает.
Контур отслеживания времени может непрерывно отслеживать временную привязку пика в активном наборе, который может упоминаться как отслеживаемый пик. Первоначально, наиболее интенсивный пик в предполагаемом наборе может выбираться в качестве отслеживаемого пика и может помещаться в активный набор. Отслеживаемый пик может включаться или не включаться в предполагаемый набор. Каждый раз, когда отслеживаемый пик заменяется предполагаемым пиком, временная привязка этого предполагаемого пика может использоваться в качестве эталонной временной привязки для поисков временной привязки. Окно поиска для поисков временной привязки может быть размещено на основе эталонной временной привязки, к примеру, как показано на фиг.4. Контур отслеживания времени может обновлять временную привязку отслеживаемого пика посредством небольшого временного регулирования в каждом периоде обновления. Небольшое временное регулирование может ограничиваться так, чтобы находиться в пределах диапазона значений, к примеру, в пределах от -TNOM до +TNOM текущей временной привязки отслеживаемого пика.
Предполагаемый набор может обновляться после каждого поиска временной привязки (или каждые NC поисков временной привязки) на основе результатов поиска. Отслеживаемый пик затем может обновляться на основе предполагаемых пиков. В одной схеме, если предполагаемый пик, соответствующий отслеживаемому пику, имеет более высокую интенсивность сигнала, чем интенсивность отслеживаемого пика, то отслеживаемый пик может заменяться посредством этого предполагаемого пика. Предполагаемый пик, соответствующий отслеживаемому пику, может быть предполагаемым пиком, ближайшим к отслеживаемому пику, предполагаемым пиком в пределах заранее определенного временного интервала отслеживаемого пика, и т.д. В другой схеме, если интенсивность сигнала наиболее интенсивного предполагаемого пика превышает интенсивность сигнала отслеживаемого пика (к примеру, на заранее определенную величину SREPLACE), то отслеживаемый пик может заменяться посредством наиболее интенсивного предполагаемого пика. Для обеих схем отслеживаемый пик может заменяться каждый раз, когда лучший предполагаемый пик доступен, или может заменяться только в том случае, если интенсивность сигнала отслеживаемого пика ниже порогового значения замены. Отслеживаемый пик также может заменяться посредством предполагаемого пика другими способами.
Контур отслеживания времени может обновлять временную привязку отслеживаемого пика посредством большого регулирования временной привязки, когда отслеживаемый пик заменяется посредством выбранного предполагаемого пика. Большое регулирование временной привязки может быть за пределами диапазона от -TNOM до +TNOM. Временная привязка выбранного предполагаемого пика может использоваться в качестве новой эталонной временной привязки для окна поиска, которое может быть размещено на новой эталонной временной привязке. Временная привязка других предполагаемых пиков также может обновляться на основе временной привязки выбранного предполагаемого пика. Например, если предшествующая эталонная временная привязка - это TREF1, а временная привязка выбранного предполагаемого пика - это Tavg,s, то новая эталонная временная привязка может быть задана как  , и временная привязка каждого оставшегося предполагаемого пика может быть обновлена как
, и временная привязка каждого оставшегося предполагаемого пика может быть обновлена как  .
.
Таблица перечисляет различные параметры, которые могут использоваться для того, чтобы выполнять поиски временной привязки и обновлять временную привязку соты. Каждый параметр в таблице 1 может иметь фиксированное или конфигурируемое значение, которое может выбираться так, чтобы предоставлять хорошую производительность. Например, период поиска может быть конфигурируемым значением между 10-20 мс или некоторым другим значением.
Технологии, описанные в данном документе, могут использоваться для того, чтобы определять временную привязку обслуживающей соты, идентификатор соты которой известен для UE. Технологии также могут использоваться для того, чтобы определять временную привязку других сот, идентификаторы сот которых известны для UE. UE может формировать один или более сигналов синхронизации для соты на основе известного идентификатора соты. UE затем может выполнять корреляцию с локально формируемым сигналом(ами) синхронизации, чтобы определять временную привязку соты. UE может выполнять поиски временной привязки в подключенном режиме, режиме ожидания и т.д.
Фиг.7 показывает схему процесса 700 для определения временной привязки соты. Процесс 700 может выполняться посредством UE (как описано ниже) или посредством некоторого другого объекта. UE может получать принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты, к примеру обслуживающей соты (этап 712). UE может коррелировать принимаемые выборки, по меньшей мере, с одним сигналом синхронизации, чтобы получать энергии для множественных гипотез временной привязки в окне поиска (этап 714). UE затем может определять временную привязку соты на основе энергий для множественных гипотез временной привязки (этап 716).
Идентификатор соты может содержать первую часть GID для группы идентификаторов сот и вторую часть NID для идентификатора в рамках группы идентификаторов сот. По меньшей мере, один сигнал синхронизации может содержать вторичный сигнал синхронизации, сформированный на основе первой и второй частей идентификатора соты. В одной схеме этапа 714 UE может формировать вторичный сигнал синхронизации на основе первой и второй частей идентификатора соты. UE затем может коррелировать принимаемые выборки во временной области с вторичным сигналом синхронизации с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки. В другой схеме, по меньшей мере, один сигнал синхронизации дополнительно может содержать основной сигнал синхронизации, сформированный на основе второй части идентификатора соты. UE может коррелировать принимаемые выборки во временной области с основными и вторичными сигналами синхронизации с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки.
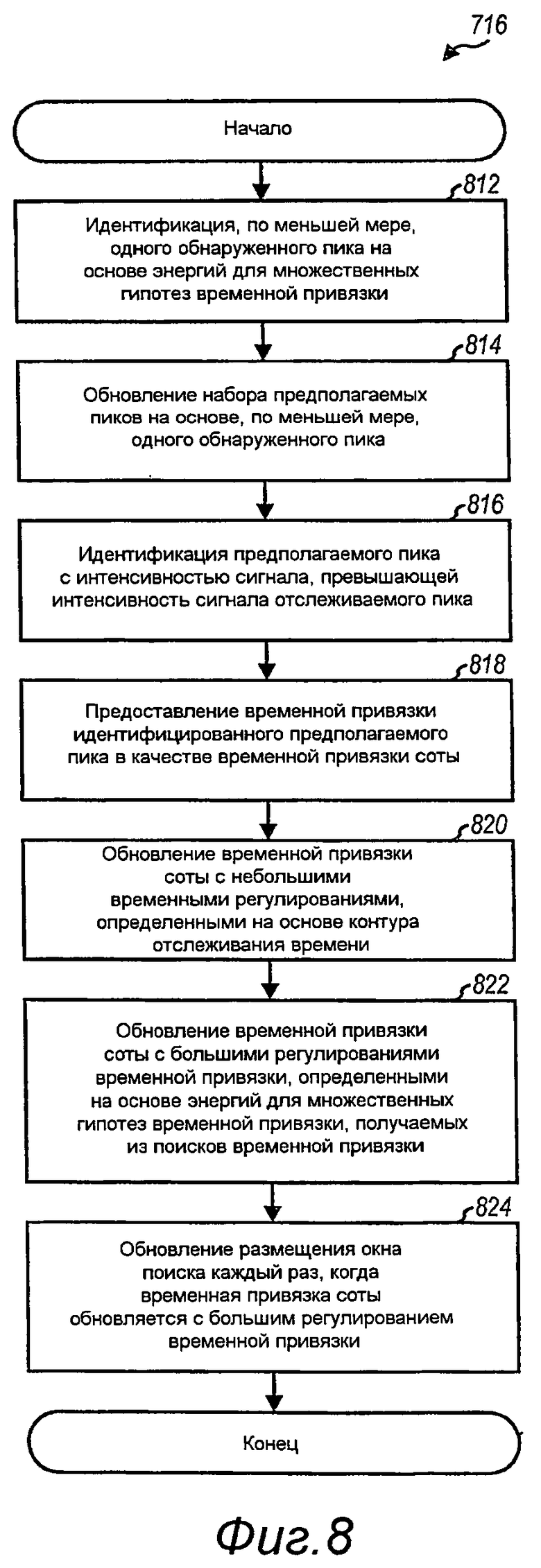
Фиг.8 показывает процесс для определения временной привязки соты, который является одной схемой этапа 716 на фиг.7. UE может идентифицировать, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки, причем каждый обнаруженный пик соответствует различным гипотезам временной привязки (этап 812). В одной схеме UE может сравнивать энергию для каждой гипотезы временной привязки с пороговым значением обнаружения. UE может объявлять обнаруженный пик для каждой гипотезы временной привязки с энергией, превышающей пороговое значение обнаружения. В другой схеме UE может накапливать энергии в окне накопления с различными временными смещениями, чтобы получать обрабатываемые методом окна энергии для множественных гипотез временной привязки. UE может сравнивать обрабатываемую методом окна энергию для каждой гипотезы временной привязки с пороговым значением обнаружения. UE затем может объявлять обнаруженный пик для каждой гипотезы временной привязки с обрабатываемой методом окна энергией, превышающей пороговое значение обнаружения.
UE может обновлять предполагаемый набор пиков на основе, по меньшей мере, одного обнаруженного пика (этап 814). В одной схеме UE может ассоциировать, по меньшей мере, один обнаруженный пик с предполагаемыми пиками. Обнаруженный пик может быть ассоциирован с предполагаемым пиком в заранее определенном интервале временной привязки обнаруженного пика, если такой предполагаемый пик присутствует. Обнаруженный пик не может быть ассоциирован ни с одним предполагаемым пиком, если нет предполагаемых пиков в заранее определенном интервале временной привязки обнаруженного пика. По меньшей мере, один обнаруженный пик также может быть ассоциирован с предполагаемыми пиками другими способами.
В одной схеме UE может обновлять интенсивность сигнала и временную привязку каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется. UE может фильтровать временную привязку каждого предполагаемого пика с помощью временной привязки ассоциированного обнаруженного пика, к примеру, на основе первого IIR-фильтра, как показано в уравнении (5). UE может фильтровать интенсивность сигнала каждого предполагаемого пика с помощью интенсивности сигнала ассоциированного обнаруженного пика, к примеру, на основе второго IIR-фильтра, как показано в уравнении (6).
UE может добавлять каждый обнаруженный пик, не ассоциированный ни с одним из предполагаемых пиков, к набору предполагаемых пиков. UE также может удалять каждый предполагаемый пик с интенсивностью сигнала ниже порогового значения отбрасывания в течение периода заранее определенного времени из набора предполагаемых пиков. UE может инициализировать набор предполагаемых пиков, по меньшей мере, с одним обнаруженным пиком, если набор является пустым.
UE может идентифицировать предполагаемый пик с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика (этап 816). UE может предоставлять временную привязку идентифицированного предполагаемого пика в качестве временной привязки соты (этап 818). UE может обновлять временную привязку соты с небольшими временными регулированиями, определенными на основе контура отслеживания времени (этап 820). UE может обновлять временную привязку соты с большими регулированиями временной привязки, определенными на основе энергий для множественных гипотез временной привязки, получаемых из поисков временной привязки (этап 822). Небольшие регулирования временной привязки могут быть в заранее определенном диапазоне значений, а большие регулирования временной привязки могут быть вне заранее определенного диапазона значений. UE может обновлять размещение окна поиска каждый раз, когда временная привязка соты обновляется с большим регулированием временной привязки (этап 824).
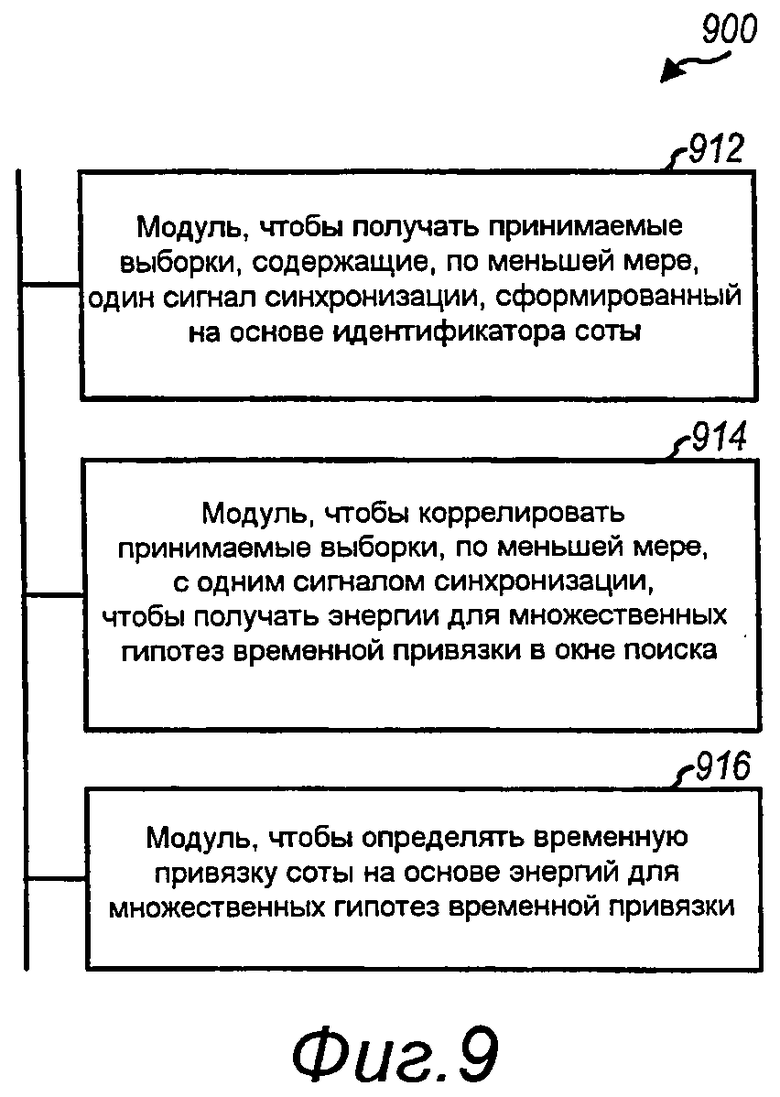
Фиг.9 показывает схему устройства 900 для определения временной привязки соты. Устройство 900 включает в себя модуль 912, чтобы получать принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты, модуль 914, чтобы коррелировать принимаемые выборки, по меньшей мере, с одним сигналом синхронизации (к примеру, во временной области), чтобы получать энергии для множественных гипотез временной привязки в окне поиска, и модуль 916, чтобы определять временную привязку соты на основе энергий для множественных гипотез временной привязки. Модули на фиг.9 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д., либо любую комбинацию вышеозначенного.
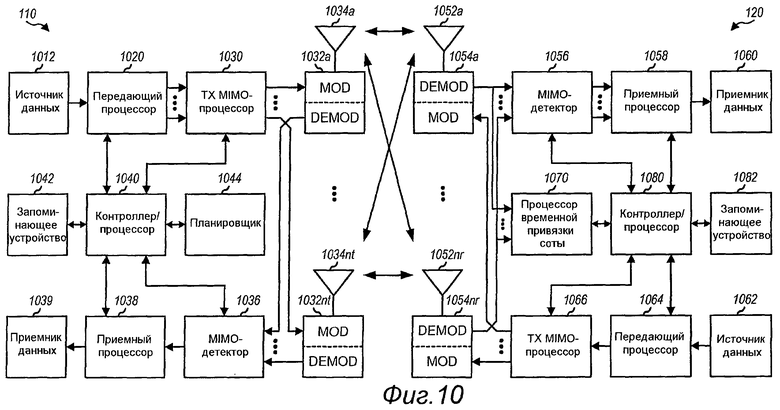
Фиг.10 показывает блок-схему схемы узла В 110 и UE 120, которые могут быть одним из узлов В и одним из UE на фиг.1. В этой схеме узел В 110 оснащен NT антеннами 1034a-1034nt, и UE 120 оснащен NR антеннами 1052а-1052nr, где в общем NT≥1 и NR≥1.
В узле B 110 передающий процессор 1020 может принимать данные для одного или более UE из источника данных 1012, обрабатывать данные для каждого UE на основе одной или более схем модуляции и кодирования, выбранных для этого UE, и предоставлять символы данных для всех UE. Передающий процессор 1020 также может формировать основные и вторичные сигналы синхронизации для каждой соты и может предоставлять символы для сигналов синхронизации для всех сот в узле B 110. Передающий процессор 1020 также может обрабатывать служебные сигналы/управляющую информацию и предоставлять служебные символы. Передающий (TX) процессор 1030 со многими входами и многими выходами (MIMO) может мультиплексировать символы данных, символы для сигналов синхронизации, служебные символы и, возможно, другие символы. TX MIMO-процессор 1030 может выполнять пространственную обработку (к примеру, предварительное кодирование) для мультиплексированных символов, если применимо, и предоставлять NT выходных потоков символов в NT модуляторов (MOD) 1032a-1032nt. Каждый модулятор 1032 может обрабатывать соответствующий выходной поток символов (к примеру, для OFDM), чтобы получать выходной поток выборок. Каждый модулятор 1032 дополнительно может обрабатывать (к примеру, преобразовывать в аналоговую форму, усиливать, фильтровать и преобразовывать с повышением частоты) выходной поток выборок, чтобы получать сигнал нисходящей линии связи. Сигналы нисходящей линии связи от NT модуляторов 1032a-1032nt могут быть переданы через NT антенн 1034a-1034nt, соответственно.
В UE 120 антенны 1052a-1052nr могут принимать сигналы нисходящей линии связи от узла B 110 и предоставлять принимаемые сигналы в демодуляторы (DEMOD) 1054a-1054nr, соответственно. Каждый демодулятор 1054 может приводить к требуемым параметрам (к примеру, фильтровать, усиливать, преобразовывать с понижением частоты и оцифровывать) соответствующий принимаемый сигнал, чтобы получать принимаемые выборки. Каждый демодулятор 1054 дополнительно может обрабатывать принимаемые выборки (к примеру, для OFDM), чтобы получать принимаемые символы. MIMO-детектор 1056 может получать принимаемые символы от всех NR демодуляторов 1054a-1054nr, выполнять MIMO-обнаружение для принимаемых символов, если применимо, и предоставлять обнаруженные символы. Приемный процессор 1058 может обрабатывать (к примеру, демодулировать, выполнять обратное перемежение и декодировать) обнаруженные символы и предоставлять декодированные данные для UE 120 в приемник 1060 данных. В общем, обработка посредством MIMO-детектора 1056 и приемного процессора 1058 комплементарна обработке посредством TX MIMO-процессора 1030 и передающего процессора 1020 в узле B 110.
В восходящей линии связи, в UE 120, данные из источника 1062 данных и сигнализация из контроллера/процессора 1080 могут обрабатываться посредством передающего процессора 1064, предварительно кодироваться посредством TX MIMO-процессора 1066, если применимо, приводиться к требуемым параметрам посредством модуляторов 1054a-1054nr и передаваться в узел B 110. В узле B 110 сигналы восходящей линии связи от UE 120 могут приниматься посредством антенн 1034, приводиться к требуемым параметрам посредством демодуляторов 1032, обрабатываться посредством MIMO-детектора 1036, если применимо, и дополнительно обрабатываться посредством приемного процессора 1038, чтобы получать данные и сигнализацию, передаваемые посредством UE 120.
Контроллеры/процессоры 1040 и 1080 могут направлять работу в узле B 110 и UE 120, соответственно. Контроллер/процессор 1080 может реализовывать или направлять процесс 700 на фиг.7, процесс 716 на фиг.8 и/или другие процессы для технологий, описанных в данном документе. Запоминающие устройства 1042 и 1082 могут сохранять данные и программные коды для узла B 110 и UE 120, соответственно. Планировщик 1044 может диспетчеризовать UE для передачи по нисходящей линии связи и/или восходящей линии связи и может предоставлять назначения ресурсов для диспетчеризуемых UE. Процессор 1070 временной привязки соты в UE 120 может выполнять поиски временной привязки, обновлять предполагаемый набор, выбирать отслеживаемый пик, обновлять временную привязку обслуживающей соты и т.д. Процессор 1070 может выполнять всю часть обработки, показанной на фиг.6-8.
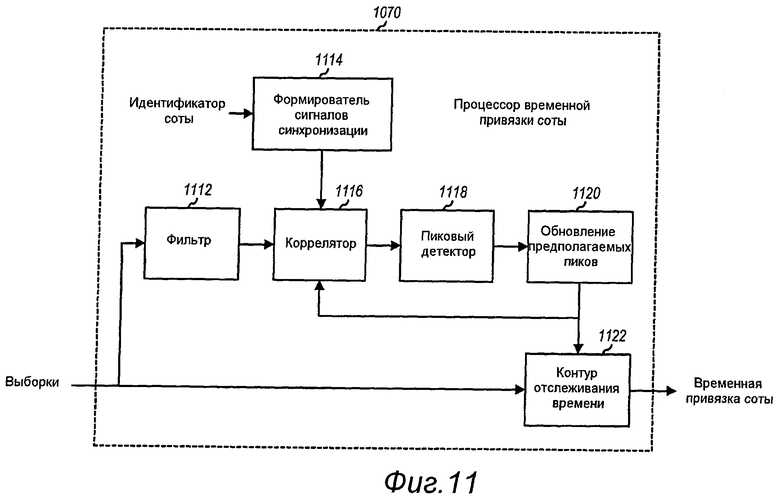
Фиг.11 показывает блок-схему схемы процессора 1070 временной привязки соты в UE 120 на фиг.10. Для простоты, фиг.11 показывает обработку для выборок временной области от одной антенны. В процессоре 1070 фильтр 1112 может получать выборки временной области на частоте дискретизации и может фильтровать эти выборки, чтобы пересылать основные и вторичные сигналы синхронизации. Фильтр 1112 также может прореживать фильтрованные выборки от частоты дискретизации до меньшей частоты. Частота дискретизации может зависеть от полосы пропускания системы. Меньшая частота может зависеть от полосы пропускания сигналов синхронизации и может составлять 1,92 мегавыборок в секунду (Msps) или какую-либо другую частоту.
Формирователь 1114 сигналов синхронизации может формировать вторичный сигнал синхронизации и, возможно, основной сигнал синхронизации на основе идентификатора соты обслуживающей соты. Коррелятор 1116 может коррелировать принимаемые выборки с основным и/или вторичным сигналом синхронизации и может предоставлять энергии для различных гипотез временной привязки в окне поиска. Принимаемые выборки могут быть выборками из фильтра 1112 (как показано на фиг.11), выборками, предоставляемыми в процессор 1070 (не показан на фиг.11), или некоторыми другими выборками. Пиковый детектор 1118 может обнаруживать пики на основе энергий для различных гипотез временной привязки и может предоставлять L обнаруженных пиков. Модуль 1120 может обновлять набор предполагаемых пиков на основе L обнаруженных пиков, как описано выше. Модуль 1120 также может определять, лучше ли предполагаемый пик, чем отслеживаемый пик, посредством контура 1122 отслеживания времени. Если лучший предполагаемый пик доступен, то модуль 1120 может предоставлять этот предполагаемый пик в контур 1122 отслеживания времени. Модуль 1120 также может предоставлять временную привязку этого предполагаемого пика в коррелятор 1116, который может размещать окно поиска на основе временной привязки этого предполагаемого пика. Контур 1122 отслеживания времени может отслеживать временную привязку пика, предоставляемую посредством модуля 1120, до тех пор, пока этот пик не заменяется другим предполагаемым пиком. Контур 1122 отслеживания времени может предоставлять временную привязку обслуживающей соты.
Специалисты в данной области техники должны понимать, что информация и сигналы могут быть представлены с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут приводиться в качестве примера по всему описанию выше, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного.
Специалисты в данной области техники дополнительно должны принимать во внимание, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытием, могут быть реализованы как электронные аппаратные средства, компьютерное программное обеспечение либо их комбинации. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы описаны выше, в общем, на основе функциональности. Реализована эта функциональность в качестве аппаратных средств или программного обеспечения, зависит от конкретного варианта применения и структурных ограничений, накладываемых на систему в целом. Высококвалифицированные специалисты могут реализовывать описанную функциональность различными способами для каждого конкретного варианта применения, но такие решения по реализации не должны быть интерпретированы как являющиеся отступлением от объема настоящего раскрытия.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытием в данном документе, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем матричной БИС (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных компонентов аппаратных средств либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте процессором может быть любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как комбинация вычислительных устройств, к примеру, комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Этапы способа или алгоритма, описанные в связи с раскрытием в данном документе, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение посредством процессора, либо в комбинации вышеозначенного. Программный модуль может постоянно размещаться в памяти типа RAM, флэш-памяти, памяти типа ROM, памяти типа EPROM, памяти типа EEPROM, в регистрах, на жестком диске, сменном диске, компакт-диске или любой другой форме носителя хранения данных, известной в данной области техники. Типичный носитель хранения данных соединен с процессором, причем процессор может считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте носитель хранения данных может быть встроен в процессор. Процессор и носитель хранения данных могут постоянно размещаться в ASIC. ASIC может постоянно размещаться в пользовательском терминале. В альтернативном варианте процессор и носитель хранения данных могут постоянно размещаться как дискретные компоненты в пользовательском терминале.
В одной или более примерных схемах описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммном обеспечении или любой комбинации вышеозначенного. Если реализованы в программном обеспечении, функции могут быть сохранены или переданы как одна или более инструкций или код на машиночитаемом носителе. Машиночитаемые носители включают в себя как компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы из одного места в другое. Носители хранения данных могут быть любыми доступными носителями, к которым можно осуществлять доступ посредством компьютера общего назначения или специального назначения. В качестве примера, а не ограничения, эти машиночитаемые носители могут содержать RAM, ROM, EEPROM, CD-ROM или другое устройство хранения на оптических дисках, устройство хранения на магнитных дисках или другие магнитные устройства хранения, либо любой другой носитель, который может быть использован для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера общего назначения или специального назначения, либо процессора общего назначения или специального назначения. Так же, любое подключение корректно называть машиночитаемым носителем. Например, если программное обеспечение передается с веб-узла, сервера или другого удаленного источника с помощью коаксиального кабеля, оптоволоконного кабеля, "витой пары", цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радиопередающие и микроволновые среды, то коаксиальный кабель, оптоволоконный кабель, "витая пара", DSL или беспроводные технологии, такие как инфракрасные, радиопередающие и микроволновые среды, включены в определение носителя. Диск (disk) и диск (disc) при использовании в данном документе включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск Blu-Ray, при этом диски (disk) обычно воспроизводят данные магнитно, тогда как диски (disc) обычно воспроизводят данные оптически с помощью лазеров. Комбинации вышеперечисленного также следует включать в число машиночитаемых носителей.
Предшествующее описание раскрытия предоставлено для того, чтобы давать возможность любому специалисту в данной области техники создавать или использовать раскрытие. Различные модификации в раскрытии должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам без отступления от сущности и объема раскрытия. Таким образом, раскрытие не имеет намерение быть ограниченным описанными в данном документе примерами и схемами, а должно удовлетворять самому широкому объему, согласованному с принципами и новыми функциями, раскрытыми в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДАЧИ СИНХРОНИЗАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2449471C2 |
| ПЕРЕДАЧИ СИНХРОНИЗАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2547094C2 |
| УЛУЧШЕННАЯ СИНХРОНИЗАЦИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2008 |
|
RU2472295C2 |
| ПОИСК СОТЫ УЗКОПОЛОСНОЙ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2689989C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2420873C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2454797C1 |
| ПОИСК СОТ С ПОМОЩЬЮ МАЯКОВЫХ РАДИОСИГНАЛОВ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2427970C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПЕРВИЧНЫХ И ВТОРИЧНЫХ СИГНАЛОВ СИНХРОНИЗАЦИИ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2491784C1 |
| КОНФИГУРАЦИЯ СИГНАЛА СИНХРОНИЗАЦИИ В НЕ ИМЕЮЩЕЙ ПРЕДЫСТОРИИ СИСТЕМЕ И АЛГОРИТМЫ ПОИСКА СОТЫ | 2016 |
|
RU2705587C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПЕРВИЧНЫХ И ВТОРИЧНЫХ СИГНАЛОВ СИНХРОНИЗАЦИИ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2447578C1 |
Изобретение относится к системам связи, в частности к технологиям для определения временной привязки соты в системе беспроводной связи. Технический результат - уменьшение времени поиска соты. Для этого описаны технологии для определения временной привязки соты в системе беспроводной связи. Абонентское устройство (UE) может получать принимаемые выборки, которые включают в себя, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты. UE может коррелировать принимаемые выборки, по меньшей мере, с одним сигналом синхронизации во временной области с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки. UE может идентифицировать, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки. UE затем может обновлять набор предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика и может идентифицировать предполагаемый пик с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика. UE может предоставлять временную привязку идентифицированного предполагаемого пика в качестве временной привязки соты. 4 н. и 31 з.п. ф-лы, 11 ил., 1 табл.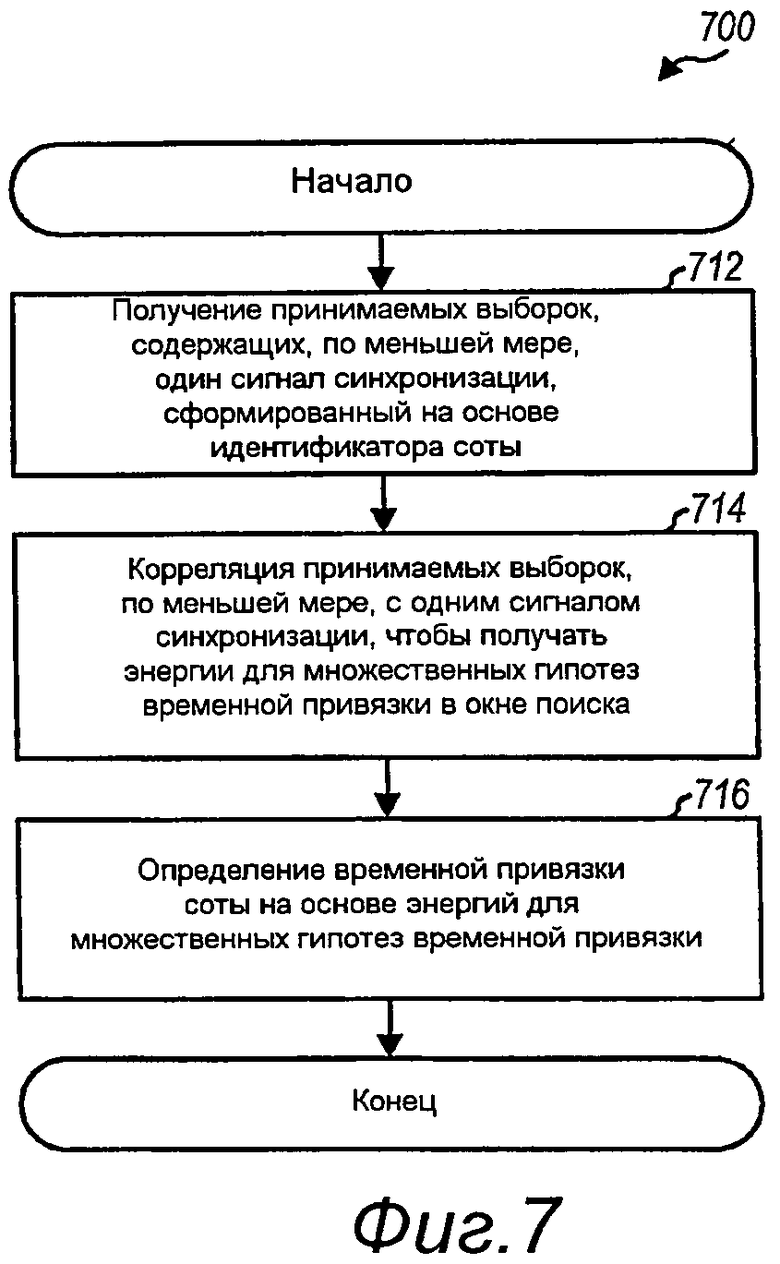
1. Способ определения временной привязки соты, содержащий этапы, на которых:
- получают принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты;
- коррелируют принимаемые выборки, по меньшей мере, с одним сигналом синхронизации, чтобы получить энергии для множественных гипотез временной привязки в окне поиска;
- определяют временную привязку соты на основе энергий для множественных гипотез временной привязки; и
- обновляют временную привязку соты с помощью, по меньшей мере, двух регулирований временной привязки.
2. Способ по п.1, в котором идентификатор соты содержит первую часть для группы идентификаторов сот и вторую часть для идентификатора в группе идентификаторов сот и в котором, по меньшей мере, один сигнал синхронизации содержит вторичный сигнал синхронизации, сформированный на основе первой и второй частей идентификатора соты.
3. Способ по п.2, в котором корреляция принимаемых выборок содержит этапы, на которых:
- формируют вторичный сигнал синхронизации на основе первой и второй частей идентификатора соты и
- коррелируют принимаемые выборки во временной области со вторичным сигналом синхронизации с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки.
4. Способ по п.2, в котором, по меньшей мере, один сигнал синхронизации дополнительно содержит основной сигнал синхронизации, сформированный на основе второй части идентификатора соты.
5. Способ по п.4, в котором корреляция принимаемых выборок содержит этапы, на которых:
- формируют основной сигнал синхронизации на основе второй части идентификатора соты,
- формируют вторичный сигнал синхронизации на основе первой и второй частей идентификатора соты и
- коррелируют принимаемые выборки во временной области с основными и вторичными сигналами синхронизации с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки.
6. Способ по п.1, в котором определение временной привязки соты на основе энергий для множественных гипотез временной привязки содержит этапы, на которых:
- идентифицируют, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки, каждый обнаруженный пик соответствует различным гипотезам временной привязки, и
- определяют временную привязку соты на основе, по меньшей мере, одного обнаруженного пика.
7. Способ по п.6, в котором идентификация, по меньшей мере, одного обнаруженного пика содержит этап, на котором:
- сравнивают энергию для каждой гипотезы временной привязки с пороговым значением обнаружения и объявляют обнаруженный пик для каждой гипотезы временной привязки с энергией, превышающей пороговое значение обнаружения.
8. Способ по п.6, в котором идентификация, по меньшей мере, одного обнаруженного пика содержит этапы, на которых:
- накапливают энергии в окне накопления при различных временных смещениях, чтобы получать обрабатываемые методом окна энергии для множественных гипотез временной привязки,
- сравнивают обрабатываемую методом окна энергию для каждой гипотезы временной привязки с пороговым значением обнаружения и
- объявляют обнаруженный пик для каждой гипотезы временной привязки с обрабатываемой методом окна энергией, превышающей пороговое значение обнаружения.
9. Способ по п.6, в котором определение временной привязки соты на основе, по меньшей мере, одного обнаруженного пика содержит этап, на котором:
- обновляют набор предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика и определяют временную привязку соты на основе набора предполагаемых пиков.
10. Способ по п.9, в котором обновление набора предполагаемых пиков содержит этапы, на которых:
- ассоциируют, по меньшей мере, один обнаруженный пик с предполагаемыми пиками,
- обновляют интенсивность сигнала и временную привязку каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется, и
- добавляют каждый обнаруженный пик, не ассоциированный ни с одним предполагаемым пиком, к набору предполагаемых пиков.
11. Способ по п.10, в котором ассоциирование, по меньшей мере, одного обнаруженного пика с предполагаемыми пиками содержит, для каждого обнаруженного пика, этапы, на которых:
- ассоциируют обнаруженный пик с предполагаемым пиком в заранее определенном интервале временной привязки обнаруженного пика, если предполагаемый пик присутствует, и
- не ассоциируют обнаруженный пик ни с одним предполагаемым пиком, если нет предполагаемых пиков в заранее определенном интервале временной привязки обнаруженного пика.
12. Способ по п.10, в котором обновление интенсивности сигнала и временной привязки каждого предполагаемого пика содержит этапы, на которых:
- фильтруют временную привязку каждого предполагаемого пика с помощью временной привязки ассоциированного обнаруженного пика, если имеется, на основе первого фильтра и
- фильтруют интенсивность сигнала каждого предполагаемого пика с помощью интенсивности сигнала ассоциированного обнаруженного пика, если имеется, на основе второго фильтра.
13. Способ по п.9, в котором обновление набора предполагаемых пиков содержит этап, на котором удаляют каждый предполагаемый пик с интенсивностью сигнала ниже порогового значения отбрасывания в течение заранее определенного периода времени из набора предполагаемых пиков.
14. Способ по п.9, в котором обновление набора предполагаемых пиков содержит этап, на котором инициализируют набор предполагаемых пиков, по меньшей мере, с одним обнаруженным пиком, если набор является пустым.
15. Способ по п.9, в котором определение временной привязки соты на основе набора предполагаемых пиков содержит этапы, на которых:
- идентифицируют предполагаемый пик с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика, и
- предоставляют временную привязку идентифицированного предполагаемого пика в качестве временной привязки соты.
16. Способ по п.1, дополнительно содержащий этапы, на которых:
- обновляют временную привязку соты с помощью небольших регулирований временной привязки, определенных на основе контура отслеживания времени, небольшие регулирования временной привязки находятся в заранее определенном диапазоне значений; и
- обновляют временную привязку соты с помощью больших регулирований временной привязки, определенных на основе энергий для множественных гипотез временной привязки, полученных из поисков временной привязки, большие регулирования временной привязки находятся вне заранее определенного диапазона значений.
17. Способ по п.16, дополнительно содержащий этап, на котором:
- обновляют размещение окна поиска каждый раз, когда временную привязку соты обновляют с помощью большого регулирования временной привязки.
18. Устройство определения временной привязки соты, содержащее:
- по меньшей мере, один процессор, выполненный с возможностью получать принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты, коррелировать принимаемые выборки, по меньшей мере, с одним сигналом синхронизации, чтобы получать энергии для множественных гипотез временной привязки в окне поиска, определять временную привязку соты на основе энергий для множественных гипотез временной привязки, и обновлять временную привязку соты с помощью, по меньшей мере, двух регулирований временной привязки.
19. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью формировать вторичный сигнал синхронизации на основе идентификатора соты и коррелировать принимаемые выборки во временной области со вторичным сигналом синхронизации при различных временных смещениях, чтобы получать энергии для множественных гипотез временной привязки.
20. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью идентифицировать, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки, причем каждый обнаруженный пик соответствует различным гипотезам временной привязки, и определять временную привязку соты на основе, по меньшей мере, одного обнаруженного пика.
21. Устройство по п.20, в котором, по меньшей мере, один процессор выполнен с возможностью обновлять набор предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика и определять временную привязку соты на основе набора предполагаемых пиков.
22. Устройство по п.21, в котором, по меньшей мере, один процессор выполнен с возможностью ассоциировать, по меньшей мере, один обнаруженный пик с предполагаемыми пиками, обновлять интенсивность сигнала и временную привязку каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется, и добавлять каждый обнаруженный пик, не ассоциированный ни с одним из предполагаемых пиков, к набору предполагаемых пиков.
23. Устройство по п.21, в котором, по меньшей мере, один процессор выполнен с возможностью идентифицировать предполагаемый пик с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика, и предоставлять временную привязку идентифицированного предполагаемого пика в качестве временной привязки соты.
24. Устройство по п.18, в котором, по меньшей мере, один процессор выполнен с возможностью обновлять временную привязку соты с помощью небольших регулирований временной привязки, определенных на основе контура отслеживания времени, и обновлять временную привязку соты с помощью больших регулирований временной привязки, определенных на основе энергий для множественных гипотез временной привязки, получаемых из поисков временной привязки, при этом небольшие регулирования временной привязки находятся в заранее определенном диапазоне значений, а большие регулирования временной привязки находятся вне заранее определенного диапазона значений.
25. Устройство определения временной привязки соты, содержащее:
- средство для получения принимаемых выборок, содержащих, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты;
- средство для корреляции принимаемых выборок, по меньшей мере, с одним сигналом синхронизации, чтобы получать энергии для множественных гипотез временной привязки в окне поиска;
- средство для определения временной привязки соты на основе энергий для множественных гипотез временной привязки; и
- средство для обновления временной привязки соты с помощью, по меньшей мере, двух регулирований временной привязки.
26. Устройство по п.25, в котором средство для корреляции принимаемых выборок содержит:
- средство для формирования вторичного сигнала синхронизации на основе идентификатора соты, и
- средство для корреляции принимаемых выборок во временной области с вторичным сигналом синхронизации с различными временными смещениями, чтобы получать энергии для множественных гипотез временной привязки.
27. Устройство по п.25, в котором средство для определения временной привязки соты на основе энергий для множественных гипотез временной привязки содержит:
- средство для идентификации, по меньшей мере, одного обнаруженного пика на основе энергий для множественных гипотез временной привязки, причем каждый обнаруженный пик соответствует различным гипотезам временной привязки, и
- средство для определения временной привязки соты на основе, по меньшей мере, одного обнаруженного пика.
28. Устройство по п.27, в котором средство для определения временной привязки соты на основе, по меньшей мере, одного обнаруженного пика содержит:
- средство для обновления набора предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика, и
- средство для определения временной привязки соты на основе набора предполагаемых пиков.
29. Устройство по п.28, в котором средство для обновления набора предполагаемых пиков содержит:
- средство для ассоциирования, по меньшей мере, одного обнаруженного пика с предполагаемыми пиками,
- средство для обновления интенсивности сигнала и временной привязки каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется, и
- средство для добавления каждого обнаруженного пика, не ассоциированного ни с одним предполагаемым пиком, к набору предполагаемых пиков.
30. Устройство по п.28, в котором средство для определения временной привязки соты на основе набора предполагаемых пиков содержит:
- средство для идентификации предполагаемого пика с интенсивностью сигнала, превышающей интенсивность сигнала отслеживаемого пика, и
- средство для предоставления временной привязки идентифицированного предполагаемого пика в качестве временной привязки соты.
31. Устройство по п.25, дополнительно содержащее:
- средство для обновления временной привязки соты с помощью небольших регулирований временной привязки, определенных на основе контура отслеживания времени, при этом небольшие регулирования временной привязки находятся в заранее определенном диапазона значений; и
- средство для обновления временной привязки соты с помощью больших регулирований временной привязки, определенных на основе энергий для множественных гипотез временной привязки, получаемых из поисков временной привязки, при этом большие регулирования временной привязки находятся вне заранее определенного диапазона значений.
32. Машиночитаемый носитель, содержащий исполняемые компьютером команды, чтобы заставить компьютер выполнять способ определения временной привязки соты, причем способ содержит этапы, на которых:
- получают принимаемые выборки, содержащие, по меньшей мере, один сигнал синхронизации, сформированный на основе идентификатора соты,
- коррелируют принимаемые выборки, по меньшей мере, с одним сигналом синхронизации, чтобы получать энергии для множественных гипотез временной привязки в окне поиска,
- определяют временную привязку соты на основе энергий для множественных гипотез временной привязки, и
- обновляют временную привязку соты с помощью, по меньшей мере, двух регулирований временной привязки.
33. Машиночитаемый носитель по п.32, причем способ дополнительно содержит этапы, на которых:
- идентифицируют, по меньшей мере, один обнаруженный пик на основе энергий для множественных гипотез временной привязки, причем каждый обнаруженный пик соответствует различным гипотезам временной привязки,
- обновляют набор предполагаемых пиков на основе, по меньшей мере, одного обнаруженного пика, и
- определяют временную привязку соты на основе набора предполагаемых пиков.
34. Машиночитаемый носитель по п.33, причем способ дополнительно содержит этапы, на которых:
- ассоциируют, по меньшей мере, один обнаруженный пик с предполагаемыми пиками,
- обновляют интенсивность сигнала и временную привязку каждого предполагаемого пика на основе интенсивности сигнала и временной привязки ассоциированного обнаруженного пика, если имеется, и
- добавляют каждый обнаруженный пик, не ассоциированный ни с одним из предполагаемых пиков, к набору предполагаемых пиков.
35. Машиночитаемый носитель по п.32, причем обновление временной привязки соты с помощью, по меньшей мере, двух временных привязок содержит:
- обновление временной привязки соты с помощью небольших регулирований временной привязки, определенных на основе контура отслеживания времени, при этом небольшие регулирования временной привязки находятся в заранее определенном диапазоне значений, и
- обновление временной привязки соты с помощью больших регулирований временной привязки, определенных на основе энергий для множественных гипотез временной привязки, получаемых из поисков временной привязки, большие регулирования временной привязки находятся вне заранее определенного диапазона значений.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ РАБОТЫ СОТОВЫХ МОБИЛЬНЫХ ТЕРМИНАЛОВ С ПОНИЖЕННЫМ ЭНЕРГОПОТРЕБЛЕНИЕМ | 1997 |
|
RU2189113C2 |
| СТАЦИОНАРНАЯ БЕСПРОВОДНАЯ РЕГИОНАЛЬНАЯ СЕТЬ С МОДУЛЯЦИЕЙ НА ОСНОВЕ ОРТОГОНАЛЬНОГО ЧАСТОТНОГО РАЗДЕЛЕНИЯ, В КОТОРОЙ ИСПОЛЬЗУЕТСЯ ОБОРУДОВАНИЕ, УСТАНОВЛЕННОЕ В ПОМЕЩЕНИИ ПОЛЬЗОВАТЕЛЯ, ИМЕЮЩЕЕ ВНУТРЕННЮЮ АНТЕННУ | 2000 |
|
RU2255427C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

