Изобретение относится к способам распознавания объектов в системах машинного зрения, телевизионных системах наблюдения, информационно-управляющих системах робототехнических комплексов.
Одной из проблем обработки видеоинформации является большая вариативность параметров съемки, таких, например, как освещенность, местоположение камеры, альбедо объекта, применяемая цветовая схема. Это приводит к тому, что один и тот же объект в зависимости от условий съемки будет характеризоваться различными векторами-признаками. Общеизвестным подходом к решению этой проблемы является применение инвариантных векторов-признаков.
Известен способ идентификации пространственно инвариантных векторов-признаков на изображении (http://www.vision.ee.ethz.ch/~surf/), который заключается в построении множеств векторов-признаков на основе анализа особенностей исходного изображения и их дальнейшей классификации с использованием интегральных изображений и вычислений взвешенного определителя матрицы Гесса.
Недостатком этого способа является невысокая точность и повторяемость результатов детекции, так как выделяемые особенности изображения чувствительны к деформации изображения (изменение освещения, поворот на произвольный угол и т.д.).
Наиболее близким к заявленному решению, выбранному нами за прототип, является способ и устройство для обнаружения объекта на изображении (патент US №6711293, МПК G06K 9/68, опубл. 23.03.2004), в котором на первом этапе вычисляются разности изображений: выполняется свертка изображения с функцией Гаусса, далее еще раз вычисляется свертка свернутого изображения с функцией Гаусса для построения разностного изображения и из входного изображения вычитают разностное изображение, на втором этапе находят локальные экстремумы значений пикселей, на третьем этапе выделяют области вокруг точек экстремума, на четвертом этапе области разбиваются на подобласти и на пятом этапе производят множество компонент - дескрипторов подобластей.
Недостатком данного способа является также невысокая точность, так как функция Гаусса обладает ограниченным набором инвариантных характеристик, характеризующих особенности изображения, описываемые векторами-признаками, и, тем самым, данные вектора являются менее информативными.
Основная техническая задача, решаемая заявляемым изобретением, состоит в создании способа, позволяющего повысить точность распознавания за счет повышения стабильности работы детекторов ключевых областей на изображении и увеличения количества инвариантных характеристик данных детекторов.
Основная техническая задача достигается тем, в способе распознавания объектов, включающем фильтрацию входного изображения, вычисление особых точек изображения, пороговую фильтрацию выделенных особых точек по значению, выделение окрестностей этих особых точек, построение произвольных дескрипторов полученных окрестностей, согласно предложенному решению при фильтрации входного сигнала выполняют свертку изображения с заданной функцией Грина при последовательном изменении параметров данной функции и определяют конечно-разностную аппроксимацию первой производной свертки входного изображения с функцией Грина, вычитая соответствующие схеме аппроксимации свертки друг из друга, причем удаление шума обнаруженных особых точек изображения проводят при помощи адаптивной пороговой фильтрации.
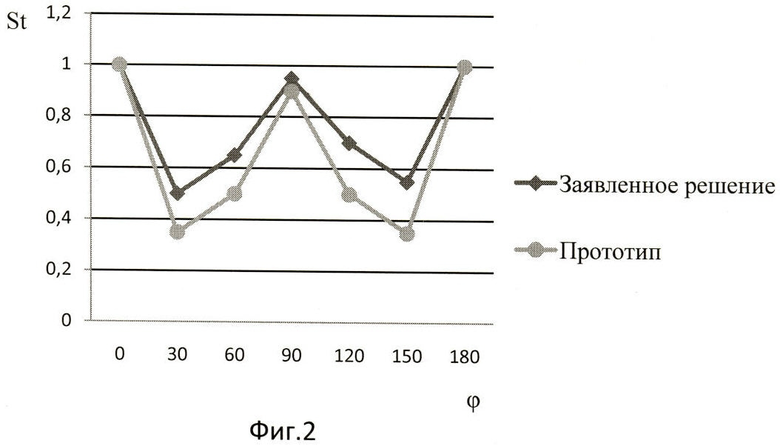
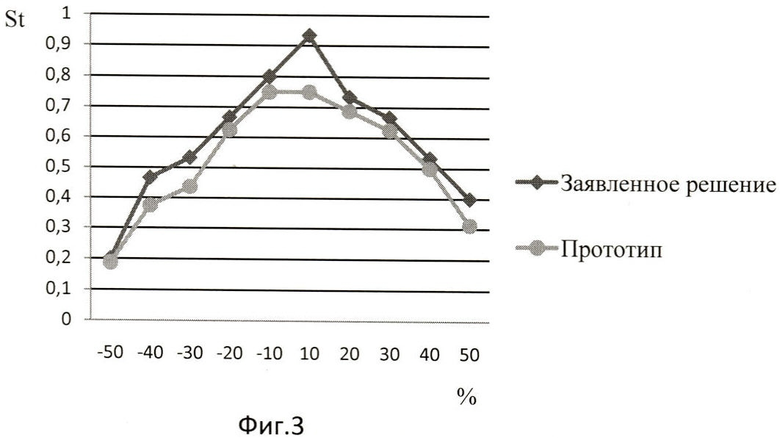
На фиг.1 представлена зависимость стабильности St работы детектора при изменении масштаба изображения σ, на фиг.2 - зависимость стабильности St работы детектора при повороте изображения на угол φ в градусах, на фиг.3 - Зависимость стабильности St работы детектора при изменении яркости изображения в процентах от базовой.
Способ осуществляется следующим образом.
Входное изображение сворачивается с заданной функцией Грина (фильтром)
для эволюционного оператора процесса Орнштейна-Уленбека при различных значениях параметров τ, λ.

где τ, λ - параметры, используемые для определения сверток на различных масштабах:
D - константа, подбираемая опытным путем для различных категорий изображений;
y=(а, b) - пространственная переменная, суть координаты (а, b) пикселя на изображении.
Полученные свертки вычитают друг из друга для получения конечно-разностной аппроксимации первой производной свертки входного изображения с фильтром. При поиске локального экстремума данной свертки приравнивают к нулю соответствующие первые производные. Находят все локальные экстремумы и проводят адаптивную пороговую фильтрацию для отсечения незначительных особенностей. Выделенные таким способом точки служат центрами окрестностей, для которых строят произвольные дескрипторы.
Предложенный способ позволяет, изменяя набор симметрии выбором соответствующей функции Грина, получать для одного и того же изображения векторы-признаки, отражающие различные свойства изображения, повышая, тем самым, информативность представления изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ЛОКАЛЬНЫХ ОСОБЕННОСТЕЙ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2535184C2 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОПОРНЫХ ТОЧЕК НА КОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ МЕСТНОСТИ ПРИ ОТСУТСТВИИ ПАРАМЕТРОВ ГЕОГРАФИЧЕСКОЙ ПРИВЯЗКИ | 2021 |
|
RU2768219C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ОБРАБОТКИ МАССИВА НЕОДНОРОДНЫХ ИЗОБРАЖЕНИЙ | 2021 |
|
RU2767281C1 |
| ОБНАРУЖЕНИЕ БЛИКА В КАДРЕ ДАННЫХ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2653461C2 |
| СПОСОБ И ЛИНИЯ ПО ОТБРАКОВКЕ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 2019 |
|
RU2722552C1 |
| АВТОМАТИЗИРОВАННЫЕ СПОСОБЫ И СИСТЕМЫ ВЫЯВЛЕНИЯ НА ИЗОБРАЖЕНИЯХ, СОДЕРЖАЩИХ ДОКУМЕНТЫ, ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ ДЛЯ ОБЛЕГЧЕНИЯ ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ ИЗ ВЫЯВЛЕННЫХ СОДЕРЖАЩИХ ДОКУМЕНТЫ ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2647670C1 |
| Способ идентификации опорных точек на космических изображениях местности при их трансформировании | 2018 |
|
RU2683626C1 |
| СПОСОБ ФИЛЬТРАЦИИ МАЛОИНФОРМАТИВНЫХ ЗОН НА ВИДЕОКАДРЕ | 2023 |
|
RU2818870C1 |
Изобретение относится к способам распознавания объектов в системах машинного зрения, телевизионных системах наблюдения, информационно-управляющих системах робототехнических комплексов. Технический результат заключается в повышении точности распознавания объектов. Такой результат достигается благодаря тому, что входное изображение сворачивается с заданной функцией Грина, полученные свертки вычитают друг из друга для получения конечно-разностной аппроксимации первой производной свертки входного изображения с фильтром, при поиске локального экстремума данной свертки приравнивают к нулю соответствующие первые производные, находят все локальные экстремумы и проводят адаптивную пороговую фильтрацию для отсечения незначительных особенностей, при этом выделенные точки служат центрами окрестностей, для которых строят произвольные дескрипторы. 3 ил.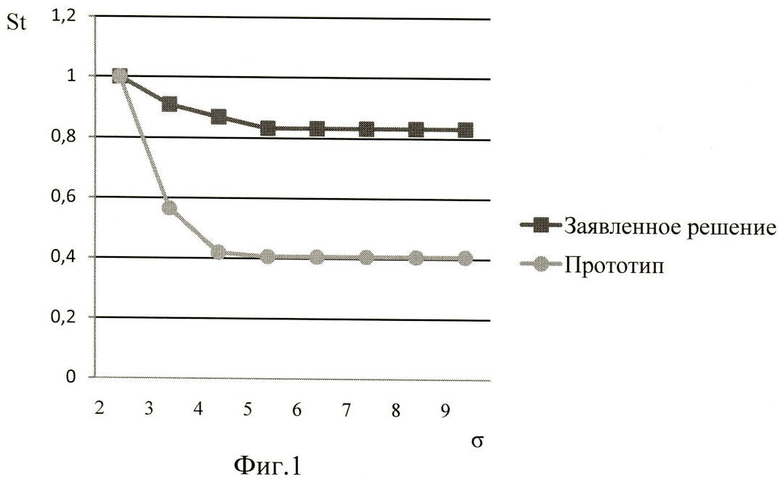
Способ распознавания объектов, включающий фильтрацию входного изображения, вычисление особых точек изображения, пороговую фильтрацию выделенных особых точек по значению, выделение окрестностей этих особых точек, построение произвольных дескрипторов полученных окрестностей, отличающийся тем, что при фильтрации входного сигнала выполняют свертку изображения с заданной функцией Грина при последовательном изменении параметров данной функции и определяют конечно-разностную аппроксимацию первой производной свертки входного изображения с функцией Грина, вычитая соответствующие схеме аппроксимации свертки друг из друга, причем удаление шума обнаруженных особых точек изображения проводят при помощи адаптивной пороговой фильтрации.
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| US 6711293 B1, 23.03.2004 | |||
| СПОСОБ АДАПТИВНОГО РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ ОБРАЗОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160467C1 |
| Устройство для выделения контуров изображений объектов | 1990 |
|
SU1785014A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

