Предложенное техническое решение задачи относится к выявлению и отбраковке из металлолома объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных, легко воспламеняющимися или взрывоопасными веществами в твердой, жидкой или газообразных фазах и может быть использовано в области металлопереработки.
К проблемам организаций, занимающихся переработкой металлолома приводящим к простою металлоперерабатывающих печей относится наличие в металлоломе объектов, наполненных веществами, находящимися в твердой, жидкой или газообразной фазах. Эти объекты могут быть наполнены легко воспламеняющимися или взрывоопасными веществами приводящие к взрывам и частичному разрушению печей и как следствие, к их простою. Поэтому выявление и отбраковка вышеуказанных объектов является одной из важнейших задач металлоперерабатывающих организаций. На данный момент этот процесс представляет собой визуальную регистрацию и нахождение объектов. А это связано с большими затратами. При этом эффективность выявления объектов человеком достаточно низка поскольку выявить наличие вещества находящегося внутри детали металлолома визуально невозможно. Автоматизация этого процесса и повышение эффективности выявления и отбраковки из металлолома вышеуказанных объектов на данный момент является актуальной задачей металлоперерабатывающих организаций.
Известен способ распознания объектов (см. патент 2438174 от 27.12.2011 г.). Способ включает фильтрацию входного изображения, вычисление особых точек изображения, пороговую фильтрацию выделенных особых точек по значению, выделение окрестностей этих особых точек, построение произвольных дескрипторов полученных окрестностей. При фильтрации входного сигнала выполняют свертку изображения с заданной функцией Грина при последовательном изменении параметров данной функции и определяют конечно-разностную аппроксимацию первой производной свертки входного изображения с функцией Грина. Далее производят вычитание соответствующих схем аппроксимации свертки друг из друга, причем удаление шума обнаруженных особых точек изображения проводят при помощи адаптивной пороговой фильтрации.
В данный способе рассмотрена теоретическая база осуществления распознания объекта, не привязанная к реализации на практике, а это может привести к значительной корректировке предлагаемого способа. Кроме этого в указанном способе не реализуются нейронные сети, позволяющие увеличить эффективность распознания объектов.
Наиболее близким к заявленному техническому решению задачи является «Способ распознания сигнала изображения» (см. патент №2413301 от 27.02 2011 г.).
В данном способе распознавания изображений, состоящем из операций распознавания фрагментов сигнала, предположительно соответствующих изображению конкретного класса объектов, вводят дополнительно операции обнаружения видеоактивности, операции вычисления траекторий динамических фрагментов, операции распознавания траекторий и операции регистрации траекторных фрагментов/кадров. При этом операции распознавания изображений применяют к зарегистрированным сигналам траекторных фрагментов/кадров, которые формируют из входного сигнала изображения по сигналам распознавания траекторий. Сигнал распознавания траекторий формируют операциями сравнения характеристик траекторий динамических фрагментов.
Данный способ повышает точность распознания объектов, но более применим и может быть реализован для визуальной интендификации и не может быть использован для реализации целей выявления объектов, наполненных веществами в твердой, жидкой или газообразных фазах.
Известен способ добычи алмазов из крутопадающих рудных тел (см. патент 2171144 от 27.07.2001 г.). Способ включает бурение вертикальных скважин с извлечением выбуренной алмазосодержащей руды на поверхность в виде пульпы. Извлеченную из рудного тела алмазосодержащую руду подвергают гидроструйному воздействию, затем ее облучают пучком ускоренных электронов и регистрируют возникающее в алмазах световое излучение Вавилова-Черенкова. Участки алмазосодержащей руды, в которых обнаружена локальная яркость свечения извлекают и отправляют на переработку.
Способ обеспечивает высокую степень выявления и извлечения, добываемых алмазов из алмазосодержащей руды, однако он не может быть использован металлоперерабатывающими организациями для выявления из металлолома объектов (боеприпасов, сосудов, малых емкостей, закрытых патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных, легко воспламеняющимися или взрывоопасными веществами в твердой, жидкой или газообразных фазах.
Наиболее близким техническим решением к предлагаемому техническому решению задачи является «Способ сортировки твердых бытовых отходов и устройство для его осуществления», (см. патент №2517225 от 27.05.2014 г.). Устройство по вышеуказанному патенту включает последовательно расположенные дозатор, загрузочный и сортировочный конвейеры. Сортировочный конвейер разделен на секции, напротив каждой из которых установлен бункер для приема определенного типоразмера фрагментов отходов. Параллельно сортировочному конвейеру установлен сбрасыватель с рабочими органами. Система управления процессом сортировки, включает расположенные над сортировочным конвейером источник и приемник электромагнитного излучения, электронные блоки в виде оцифровывающего, запоминающего и задающего устройств, а также блок сравнения и усилитель, причем выход приемника через оцифровывающее и запоминающее устройства соединен с первым входом блока сравнения. На второй вход блока сравнения подается оцифрованное изображение определенного типоразмера фрагмента отходов от задающего устройства. Выход блока сравнения через усилитель соединен с рабочими органами сбрасывателя.
Данное устройство достаточно эффективно при реализации в сортировке твердых бытовых отходов, однако использование его для выявления объектов, наполненных веществами в твердой, жидкой или газообразных фазах вызывает определенные затруднения.
Техническим результатом предложенного технического решения задачи является выявление из металлолома объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных, веществами в твердой, жидкой или газообразных фазах, представляющими угрозу выхода из строя металлоперерабатывающих печей.
Также техническим результатом предложенного технического решения задачи является снижение трудоемкости процесса выявления вышеуказанных объектов за счет его автоматизации.
Вариант 1
Технический результат достигается тем, что в способе отбраковки из металлолома /твердо/жидко/газо наполненных объектов, включающем идентификацию по типоразмеру и траектории, идентификацию по траектории проводят в жидкой среде под воздействием электромагнита и добавляют идентификацию по скорости погружения в жидкой среде, при этом все идентификации проводят параллельно и по нейронным сетям, выходные данные, которых вводят в нейронную сеть по отбраковке объекта.
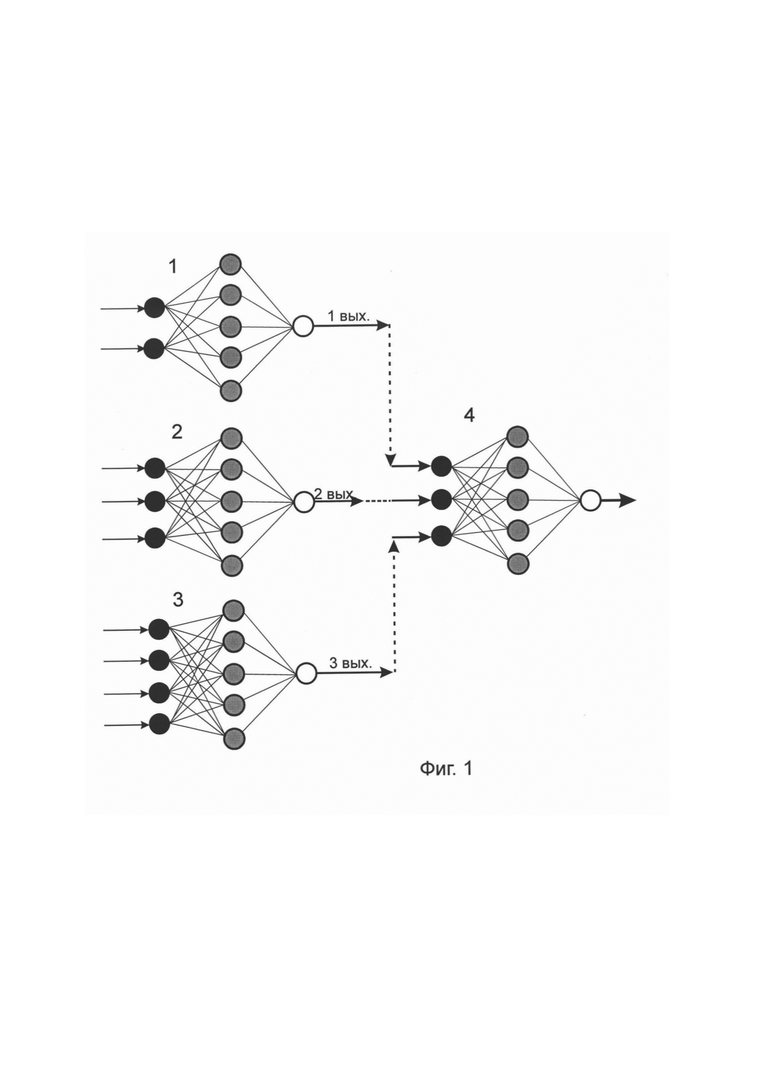
На фиг. 1 - представлена реализуемая в способе схема нейронной сети.
Сущность способа заключается в том, что идентификацию проводят параллельно по трем критериям:
1. Идентификацию по типоразмеру.
2. Идентификацию по скорости погружения в жидкой среде.
3. Идентификацию по траектории в жидкой среде под воздействием электромагнита.
Каждому вышеуказанному критерию соответствует тот же номер идентификации реализуемой в нейронной сети 1, 2, и 3 соответственно (фиг. 1).
Полученные результаты от параллельной идентификации трех нейронных сетей по вышеуказанным критериям, являются входными данными для их реализации в нейронной сети 4 (фиг. 1), по отбраковке объекта и получения окончательного решения по выявлению из металлолома объектов, наполненных веществами в твердом, жидком или газообразном состоянии представляющим угрозу для металлоперерабатывающей печи. Применение параллельной идентификации по трем вышеописанным критериям позволяет повысить достоверность выявления /твердо/жидко/газо наполненных объектов.
Способ реализован в линии по отбраковке из металлолома /твердо/жидко/газо наполненных объектов.
Технический результат достигается тем, что в линии по отбраковке из металлолома /твердо/жидко/газо наполненных объектов, включающей последовательно расположенные загрузочный конвейер, узел перегрузки, сортировочный конвейер состоящий из приемного и раздаточного узлов, бункер, сбрасыватель и устройство детектирования, сортировочный конвейер снабжен заполненным жидкостью резервуаром в котором размещен приемный узел и узел перегрузки выполненный в виде пирамидальной обечайки погруженной в жидкость на высоту размещенных на ней на взаимно перпендикулярных сторонах электромагнитом и устройством детектирования, при этом пирамидальная обечайка со стороны приемного узла снабжена вырезом, а устройство распознавания, сбрасыватель и бункер размещены на раздаточном узле сортировочного конвейера.
Преимущественно чтобы, пирамидальная обечайка была выполнена из нержавеющей стали, пластика, полимера или композитного материала.
Преимущественно чтобы, резервуар был снабжен очистной установкой.
Преимущественно чтобы, в жидкость были добавлены очищающие средства.
Преимущественно чтобы, в жидкость были добавлены вещества, повышающие ее плотность.
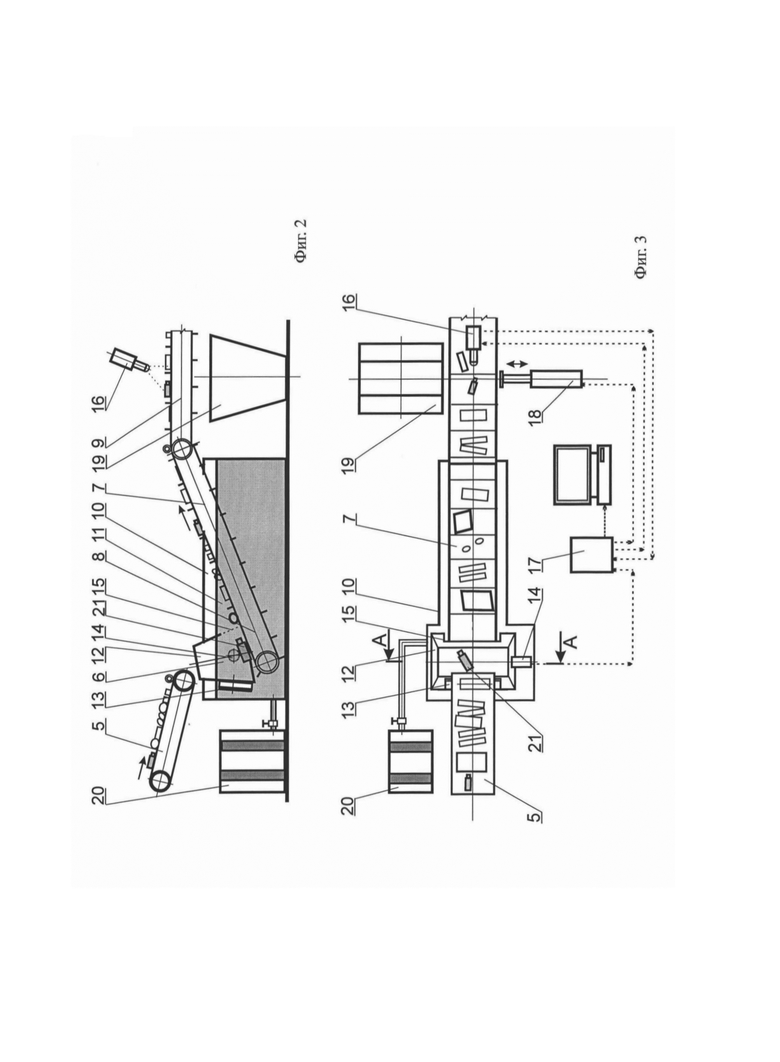
На фиг. 2 - представлен общий вид линии (блок управления условно не показан).
На фиг. 3 - показан вид сверху на линию.
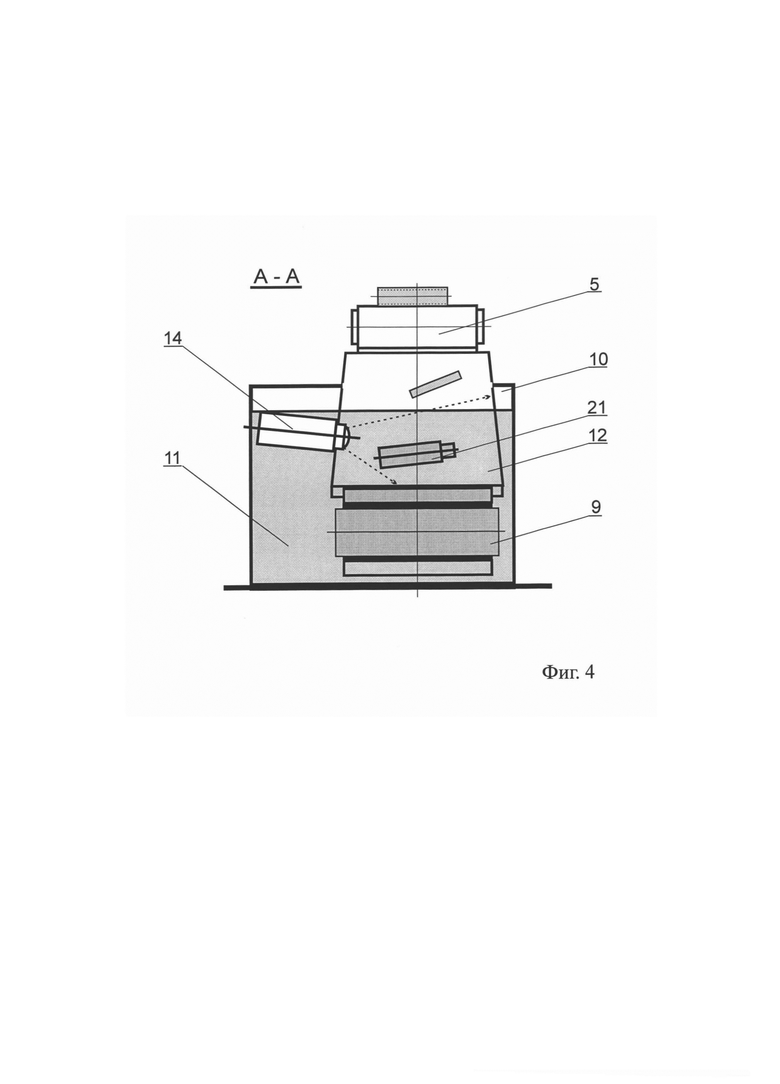
На фиг. 4 - показан разрез по А-А на фиг. 3.
Предложенное техническое решение задачи состоит из последовательно расположенных; загрузочного конвейера 5, узла перегрузки 6 и сортировочного конвейера 7 с приемным и разгрузочными узлами 8 и 9, соответственно (фиг. 2 и фиг. 3). Приемный узел 8 сортировочного конвейера 7 и узел перегрузки 6 размещены в резервуаре 10 заполненным жидкостью 11. Узел перегрузки 6 выполнен в виде пирамидальной обечайки 12 с закрепленными на ней на взаимно перпендикулярных сторонах электромагнитом 13 и устройством детектирования 14, при этом они полностью находятся в жидкости 11 резервуара 10 (фиг. 4). Пирамидальная обечайка 12 снабжена вырезом 15 для прохождения металлолома, при движении его по сортировочному конвейеру 7. Раздаточный узел 9 снабжен устройством распознавания 16, которое информативно связано, через блок управления 17, с устройством детектирования 14 и сбрасывателем 18. Устройство распознавания 16, сбрасыватель 18 и бункер 19 размещены на раздаточном узле 9 сортировочного конвейера 7.
Для повышения эффективности воздействия электромагнита 13 пирамидальная обечайка 12 изготовлена из немагнитного материала, например, нержавеющей стали, пластика, полимера или композита. Резервуар 10 снабжен очистной установкой 20 или же в нем может быть использована техническая вода производственного цикла. В используемую в резервуаре 10 жидкость 11 могут быть добавлены компоненты, очищающие металлолом от коррозии и грязи.
Предложенное техническое решение задачи работает следующим образом.
Металлолом с помощью манипулятора (не показано), подается на загрузочный конвейер 5 по которому он поступает на узел перегрузки 6 представляющий собой пирамидальную обечайку 12 находящуюся в резервуаре 10 наполненном жидкостью 11 (фиг. 2 и фиг. 3). Падая в жидкость 11 металлолом демпфируя об нее теряет в скорости.
Погружаясь в жидкости 11 металлолом движется с уменьшенной скоростью обусловленной сопротивлением жидкости и затем попадает на приемный узел 8, сортировочного конвейера 7.
Устройство детектирования 14, закрепленное на одной из сторон пирамидальной обечайки 12, передает информацию в блок управления 17 о проходящем металлоломе: его габаритах, форме, скорости погружения в жидкости, и траектории падения металлолома в жидкости под воздействием электромагнита 13 (фиг. 4).
Блок управления 17 обрабатывает полученную с устройства детектирования 14 информацию и производит идентификацию объектов 21 по трем критериям.
Это распознание объектов 21 по типоразмерам, заданным в программном обеспечении линии. К данным типоразмерам относятся; боеприпасы, сосуды, малые емкости, заглушенные патрубки, огнетушители, малые газобаллоны, пневматическая подвеска автомобилей и прочее.
Распознание объектов 21 по типоразмерам осуществляется по нейронной сети 1 и определяется двумя входными параметрами - габариты и форма металлолома (фиг. 1).
Вторым критерием, по которому блоком управления 17, выявляются объекты 21, является то, что объекты 21, заполненные веществами в твердом, жидком или газообразном состоянии в сравнении с общей массой металлолома имеют меньшую удельную плотность, поэтому и скорость падения в жидкости 11 у них меньше.
Блок управления 17, имея наработанную базу данных по скорости падения металлолома различной конфигурации регистрирует отклонения в скорости падения объекта 21.
Распознание объектов 21 по скорости падения в жидкости элементов металлолома проводится нейронной сетью 2 по трем параметрам: скорости погружения металлолома, его габаритах и форме, (фиг. 1).
Для более эффективного и безошибочного выявления объектов 21, в предложенном техническом решении задачи добавлен критерий траектории падения металлолома в жидкости под воздействием электромагнита 13.
В этом случае при движении металлолома по пирамидальной обечайке 12, основная масса металла будет иметь незначительное отклонение своей траектории падения в сторону электромагнита 13. Это обусловлено высокой плотностью основной массы металла. Объекты 21, скорость падения и плотность которых меньше, отклоняются в сторону электромагнита 13, по более пологой траектории.
Блок управления 17, используя базу данных по траектории движения металлолома в жидкости под воздействием электромагнита 13 распознает объекты 21 используя нейронную сеть 3 имеющая четыре входных параметра - траектория металлолома в жидкости под воздействием электромагнита, масса, габариты и форма (фиг. 1).
Таким образом в предложенном техническом решении задачи выявление и отбраковка объектов 21, осуществляется по трем критериям, реализуемым в способе.
1. Идентификация по типоразмеру.
2. Идентификация по скорости погружения в жидкой среде.
3. Идентификация по траектории в жидкости под воздействием электромагнита.
Полученные решения с трех нейронных сетей являются входными (нейронами) для нейронной сети 4, которая выдает искомое решение по отбраковке объекта 21 (фиг. 1).
Полученное решение формируется в блоке управления 17 в команду на выявление идентифицированного объекта 21 устройству распознавания 16 находящемуся на раздаточном узле 9 сортировочного конвейера 7. Устройство распознавания 16 зарегистрировав объект 21, информирует об этом блок управления 17, а последний выдает команду сбрасывателю 18 на удаление объекта 21 с ленты сортировочного конвейера 7 в бункер 19.
Поступающий на переработку металлолом находится как правило в загрязненном состоянии, поэтому в предложенном техническом решении задачи предусмотрено его очищение. С этой целью в жидкость 11 резервуара 10 добавляются очищающие средства.
Для повышения эффективности отбраковки объектов 21 в жидкость 11 резервуара 10 могут быть добавлены вещества, повышающие его плотность. Так как, чем выше плотность жидкости 11, тем эффективней факторы, констатирующие наличие объекта 21, такие как замедленное падение и пологость траектории.
При работе линии на поверхности электромагнита 13 происходит нарастание мелких деталей, типа, гвоздей, саморезов, гаек, мелких винтов и болтов и прочего. Для их удаления в программном обеспечении блока управления 17 предусмотрено периодическое кратковременное отключение питания электромагнита 13.
Вариант 2
Технический результат достигается тем, что в способе отбраковки из металлолома /твердо/жидко/газо наполненных объектов, включающем идентификацию по типоразмеру и траектории, идентификацию по траектории проводят в жидкой среде под воздействием электромагнита и добавляют идентификацию по скорости погружения в жидкой среде и идентификацию по изменению температуры под воздействием нагретой жидкости, температура которой превышает температуру металлолома не менее чем на 10 градусов, при этом все идентификации проводят параллельно и по нейронным сетям, выходные данные, которых вводят в нейронную сеть по отбраковке объекта.
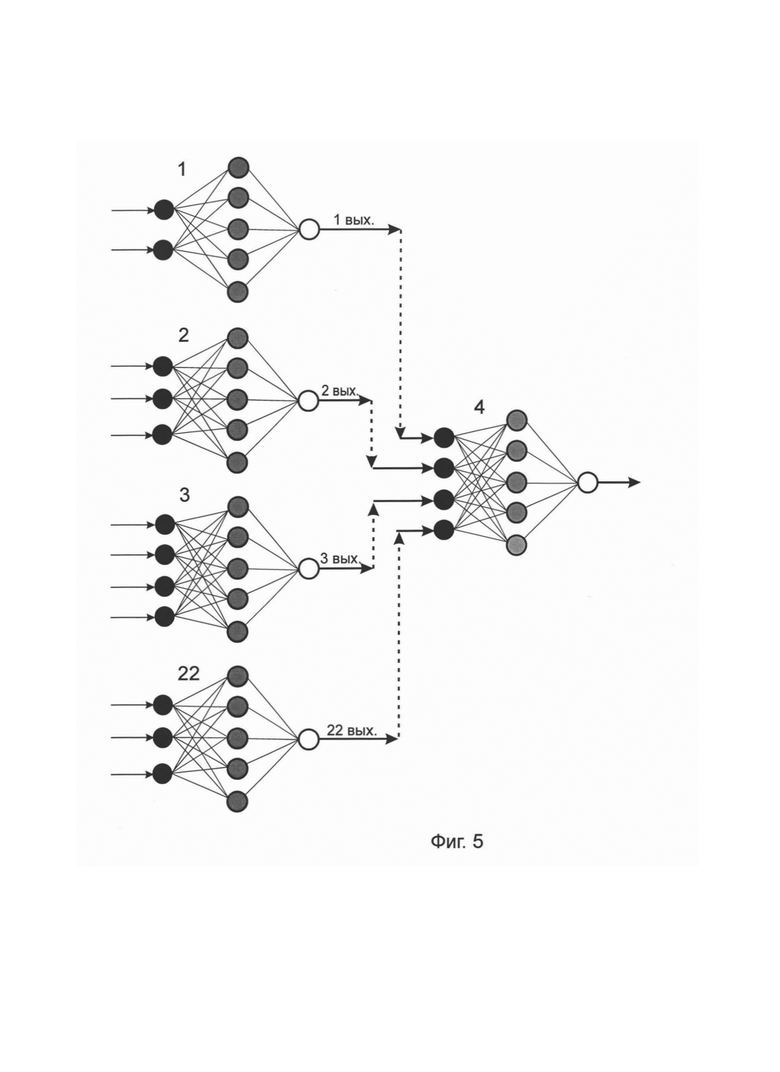
На фиг. 5 - представлена схема нейронной сети, реализуемая в способе по варианту 2.
Сущность способа заключается в том, что идентификацию проводят параллельно по четырем критериям:
1. Идентификацию по типоразмеру.
2. Идентификацию по скорости погружения в жидкой среде.
3. Идентификацию по траектории в жидкости под воздействием электромагнита.
4. Идентификацию по изменению температуры под воздействием нагретой жидкости.
Каждому вышеуказанному критерию соответствуют следующие номера идентификации, реализуемой с использованием нейронной сети 1, 2, 3 и 22, соответственно (фиг. 5).
Полученные результаты от параллельной идентификации четырех нейронных сетей, по вышеуказанным критериям, являются входными данными для их реализации в нейронной сети 4 (фиг. 5) по отбраковке объекта и получения окончательного решения по выявлению из металлолома объектов, наполненных веществом в твердом жидком или газообразном состоянии представляющим угрозу для металлоперерабатывающей печи.
Применение параллельной идентификации по четырем вышеописанным критериям позволяет повысить достоверность выявления твердо/жидко/газо наполненных объектов.
Способ реализован в линии по отбраковке из металлолома /твердо/жидко/газо наполненных объектов.
Технический результат достигается тем, что в линии по отбраковке из металлолома /твердо/жидко/газо наполненных объектов, включающей, последовательно расположенные загрузочный конвейер, узел перегрузки, сортировочный конвейер состоящий из приемного и раздаточного узлов, бункер, сбрасыватель и устройство детектирования. Приемный узел и узел перегрузки размещены в резервуаре заполненным жидкостью, температура которой превышает температуру металлолома не менее чем на 10 градусов, а узел перегрузки выполнен в виде пирамидальной обечайки с закрепленными с трех ее сторон: электромагнитом, устройством детектирования и тепловизором, причем резервуар снабжен электроводонагревателем, пирамидальная обечайка со стороны приемного узла снабжена вырезом, а устройство распознавания, сбрасыватель и бункер размещены на раздаточном узле сортировочного конвейера.
Преимущественно чтобы, пирамидальная обечайка была выполнена из нержавеющей стали, пластика, полимера или композитного материала.
Преимущественно чтобы, резервуар был снабжен очистной установкой.
Преимущественно чтобы, в жидкость были добавлены очищающие средства.
Преимущественно чтобы, в жидкость были добавлены вещества, повышающие ее плотность.
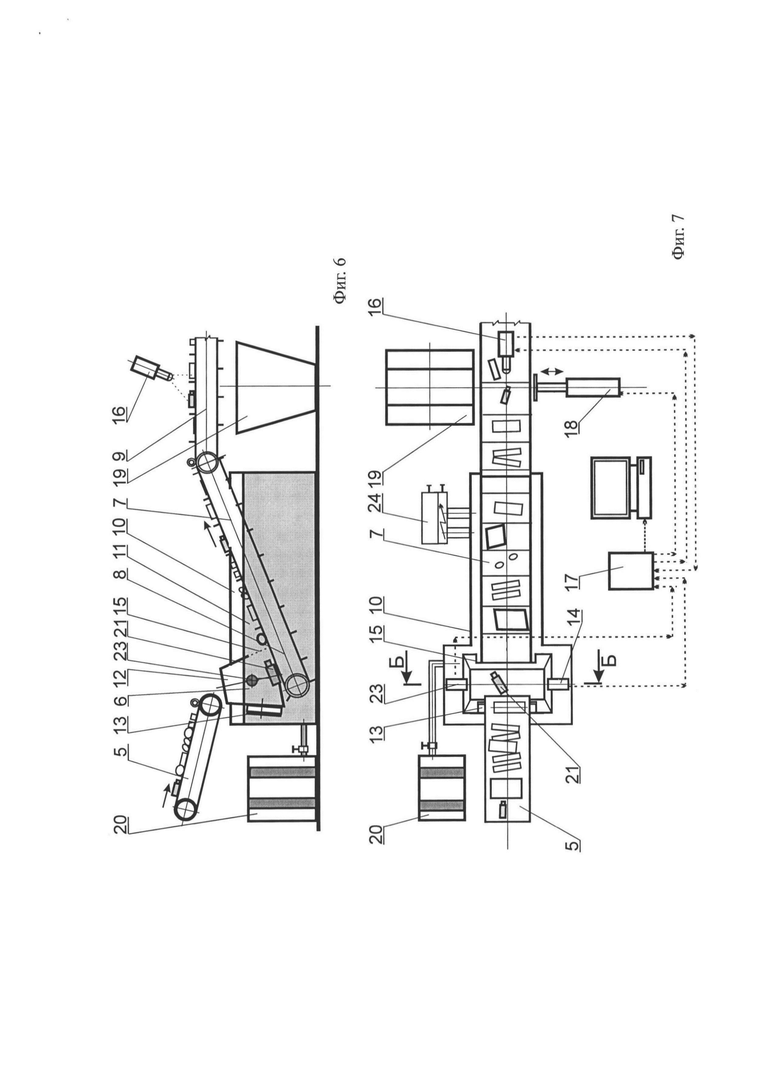
На фиг. 6 - представлен общий вид линии по варианту 2.
На фиг. 7 - показан вид сверху на линию по варианту 2..
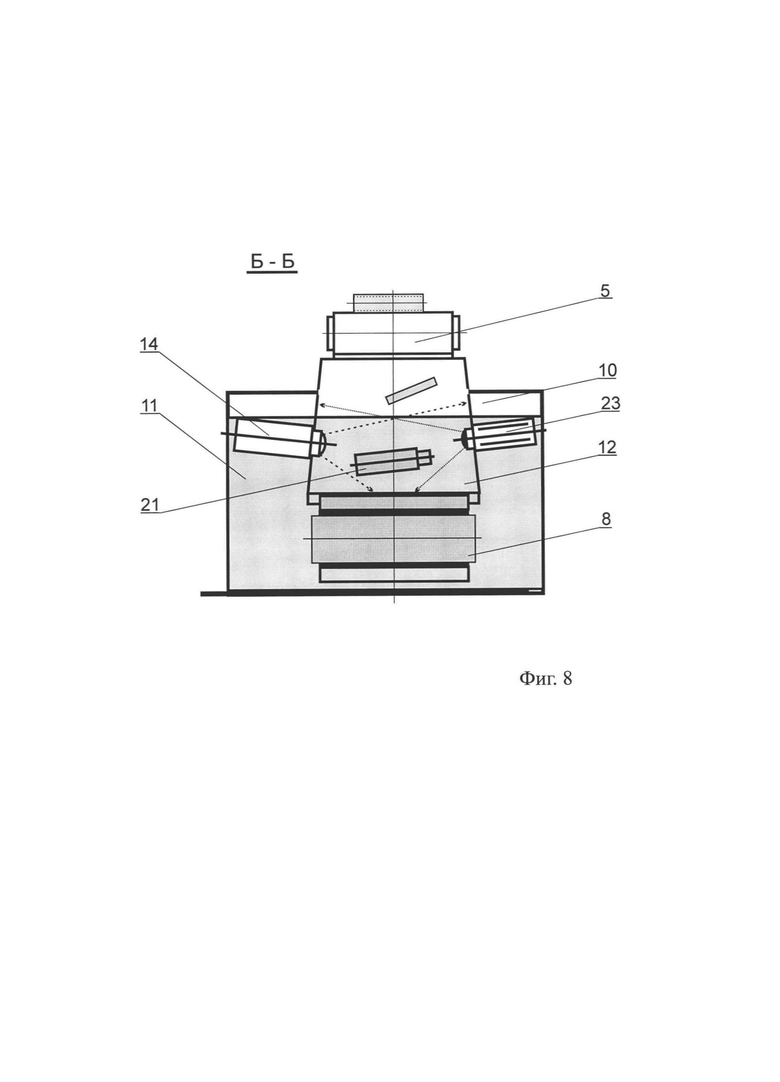
На фиг. 8 - показан разрез по Б-Б на фиг. 7.
Данное техническое решение задачи отличается от вышеизложенного тем, что температура жидкости 11 находящейся в резервуаре 10 выше температуры поступающего на отбраковку металлолома не менее чем на 10 градусов. Кроме этого, на третьей стороне пирамидальной обечайки 12 закреплен - тепловизор 23, а резервуар 10 снабжен электроводонагревателем 24 (фиг. 6 и фиг. 7).
Предложенное техническое решение задачи работает следующим образом.
Металлолом с помощью манипулятора (не показано), подается на загрузочный конвейер 5 по которому он поступает на узел перегрузки 6 представляющий собой пирамидальную обечайку 12 находящуюся в резервуаре 10 наполненном жидкостью 11 (фиг. 6 и фиг. 7). Падая в жидкость 11 металлолом демпфируя об нее теряет в скорости. Погружаясь в жидкости 11 металлолом движется с уменьшенной скоростью обусловленной сопротивлением жидкости и затем попадает на приемный узел 8, сортировочного конвейера 7.
Устройство детектирования 14, закрепленное на одной из сторон пирамидальной обечайки 12, передает информацию в блок управления 17 о проходящем металлоломе: его габаритах, форме, скорости погружения в жидкости, и траектории падения металлолома в жидкости под воздействием электромагнита 13 (фиг. 8).
Тепловизор 23 также закреплен на пирамидальной обечайке 12 и передает информацию в блок управления 17 об изменении температуры погруженного в жидкость 11 металлолома.
Блок управления 17 обрабатывает полученную с устройства детектирования 14 и тепловизора 23 информацию и производит идентификацию объектов 21 по четырем критериям.
Это распознание объектов 21 по типоразмерам, заданным в программном обеспечении линии. К данным типоразмерам относятся; боеприпасы, сосуды, малые емкости, заглушенные патрубки, огнетушители, малые газобаллоны, пневматическая подвеска автомобилей и прочее.
Распознание объектов 21 по типоразмерам осуществляется по нейронной сети 1 и определяется двумя входными параметрами - габариты и форма металлолома (фиг. 5).
Вторым критерием, по которому блоком управления 17, выявляются объекты 21, является то, что объекты 21, заполненные веществами в твердом, жидком или газообразном состоянии в сравнении с общей массой металлолома имеют меньшую удельную плотность, поэтому и скорость падения в жидкости 11 у них меньше.
Блок управления 17, имея наработанную базу данных по скорости падения металлолома различной конфигурации регистрирует отклонения в скорости падения объекта 21.
Распознание объектов 21 по скорости падения в жидкости металлолома проводится нейронной сетью 2 по трем параметрам: скорости погружения металлолома, его габаритах и форме, (фиг. 5).
Третий критерий, по которому осуществляется выявления объектов 21, в предложенном техническом решении задачи является критерий траектории металлолома в жидкости под воздействием электромагнита 13.
В этом случае при движении металлолома по пирамидальной обечайке 12, основная масса металла будет иметь незначительное отклонение своей траектории падения в сторону электромагнита 13. Это обусловлено высокой плотностью основной массы металла. Объекты 21, скорость падения и плотность которых меньше, отклоняются в сторону электромагнита 13, по более пологой траектории.
Блок управления 17, используя базу данных по траектории движения металлолома в жидкости под воздействием электромагнита 13 распознает объекты 21 используя нейронную сеть 3 имеющая четыре входных параметра - траектория металлолома в жидкости под воздействием электромагнита, масса, габариты и форма (фиг. 5).
Для более эффективного и безошибочного выявления объектов 21, в предложенном техническом решении задачи добавлен критерий изменения температуры металлолома под воздействием нагретой жидкости 11. С этой целью резервуар 10 снабжен электроводонагревателем 24, который поддерживает температуру жидкости 11 в резервуаре 10 не менее чем на 10 градусов выше чем у металлолома, а на пирамидальной обечайке 12 закреплен тепловизор 23. Как известно, точность показаний тепловизора 23 составляет порядка 0.1-0.01 градуса. При прохождении металлолома через пирамидальную обечайку 12 в нагретой жидкости 11, металлолом успевает нагреться на 0.5-0,7 град, в то время как объекты 21 заполненные веществами в твердом, жидком или газообразном состоянии нагреваются на 0,1 -0,2 градуса, что обусловлено более высокой их теплоемкость. Кроме разности в теплоемкости, объекты 21, являющиеся как правило, герметичными сосудами и за время пока они опускаются на приемный узел 8, их сложно прогреть, так как взаимодействие с жидкостью у них имеет место лишь по внешней поверхности объектов 21, в то время как, например, отрезок швеллера вся поверхность (внешняя и внутренняя) которого оказывается во взаимодействии с жидкостью, прогревается быстро.
Тепловизор 23 выявив несоответствие температуры объекта 21 передает информацию блоку управления 17.
Блок управления 17, используя базу данных по изменению температурного режима металлолома под воздействием нагретой жидкости распознает объекты 21 используя нейронную сеть 22 имеющую три входных параметра - масса, габариты и изменение температуры металлолома (фиг. 5).
Таким образом в предложенном техническом решении задачи, выявление и отбраковка объектов 21, осуществляется по четырем критериям, указанным в способе по варианту 2.
1. Идентификация по типоразмеру.
2. Идентификация по скорости погружения в жидкой среде.
3. Идентификация по траектории в жидкости под воздействием электромагнита.
4. Идентификация по изменению температуры под воздействием нагретой жидкости.
Полученные решения с четырех нейронных сетей являются входными данными (нейронами) для нейронной сети 4, которая выдает искомое решение по отбраковке объекта 21 (фиг. 5).
Это решение формируется в блоке управления 17 в команду устройству распознавания 16, на выявление идентифицированного объекта 21 находящемуся на раздаточном узле 9 сортировочного конвейера 7. Устройство распознавания 16 зарегистрировав объект 21, информирует об этом блок управления 17, а последний выдает команду сбрасывателю 18 на удаление объекта 21 с ленты сортировочного конвейера 7 в бункер 19.
Поступающий на переработку металлолом находится как правило в загрязненном состоянии, поэтому в предложенном техническом решении задачи предусмотрено его очищение. С этой целью в жидкость 11 резервуара 10 добавляются очищающие средства.
Для повышения эффективности отбраковки объектов 21 в жидкость 11 резервуара 10 могут быть добавлены вещества, повышающие его плотность. Так как, чем выше плотность жидкости 11, тем эффективней факторы, констатирующие наличие объекта 21, такие как замедленное падение и пологость траектории.
При работе линии на поверхности электромагнита 13 происходит нарастание мелких деталей, типа, гвоздей, саморезов, гаек, мелких винтов и болтов и прочего. Для их удаления в программном обеспечении блока управления 17 предусмотрено периодическое кратковременное отключение питания электромагнита 13.
Предложенном техническом решении задачи позволяет:
- повысить эффективность выявления и отбраковки из металлолома /твердо/жидко/газо наполненных объектов;
- обеспечить автоматизацию процесса выявления объектов из металлолома.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ПО ОТБРАКОВКЕ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2722553C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОТБРАКОВКИ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2744531C1 |
| Кран-манипулятор, предназначенный для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии | 2019 |
|
RU2722600C1 |
| Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов | 2020 |
|
RU2726576C1 |
| Система мониторинга состояния ленточного конвейера преимущественно для подземных наклонно/горизонтальных горных выработок | 2020 |
|
RU2743600C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715812C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715813C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| Способ защиты систем управления транспортных средств от вторжений | 2019 |
|
RU2737229C1 |
Предложенная группа изобретений относится к выявлению и отбраковке из металлолома объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее), наполненных легковоспламеняющимися или взрывоопасными веществами в твердой, жидкой или газообразных фазах, и может быть использована в области металлопереработки. Способ отбраковки из металлолома /твердо/жидко/газонаполненных объектов включает идентификацию по типоразмеру и траектории. Идентификацию по траектории проводят в жидкости и под воздействием электромагнита, добавляют идентификацию по скорости погружения в жидкость. Все идентификации проводят параллельно и по нейронным сетям, выходные данные которых вводят в нейронную сеть по отбраковке объекта. По второму варианту способа дополнительно осуществляют идентификацию по изменению температуры под воздействием нагретой жидкости. Линия по отбраковке из металлолома /твердо/жидко/газонаполненных объектов включает последовательно расположенные загрузочный конвейер, узел перегрузки, сортировочный конвейер, состоящий из приемного и раздаточного узлов, бункер, сбрасыватель и устройство детектирования. Сортировочный конвейер снабжен заполненным жидкостью резервуаром, в котором размещены приемный узел и узел перегрузки, выполненный в виде пирамидальной обечайки, погруженной в жидкость резервуара на высоту размещенных на ней на взаимно перпендикулярных сторонах электромагнита и устройства детектирования. Пирамидальная обечайка со стороны приемного узла снабжена вырезом. Устройство распознавания, сбрасыватель и бункер размещены на раздаточном узле сортировочного конвейера. По второму варианту линии приемный узел и узел перегрузки размещены в резервуаре, заполненном жидкостью, температура которой превышает температуру металлолома не менее чем на 10 градусов, а узел перегрузки выполнен в виде пирамидальной обечайки с закрепленными с трех ее сторон: электромагнитом, устройством детектирования и тепловизором. Резервуар снабжен электроводонагревателем. Технический результат – повышение эффективности отбраковки из металлолома твердо/жидко/газонаполненных объектов. 4 н. и 8 з.п. ф-лы, 8 ил.
1. Способ отбраковки из металлолома /твердо/жидко/газонаполненных объектов, включающий идентификацию по типоразмеру и траектории, отличающийся тем, что идентификацию по траектории проводят в жидкости и под воздействием электромагнита, добавляют идентификацию по скорости погружения в жидкость, при этом все идентификации проводят параллельно и по нейронным сетям, выходные данные которых вводят в нейронную сеть по отбраковке объекта.
2. Линия по отбраковке из металлолома /твердо/жидко/газонаполненных объектов, включающая последовательно расположенные загрузочный конвейер, узел перегрузки, сортировочный конвейер, состоящий из приемного и раздаточного узлов, бункер, сбрасыватель и устройством детектирования, отличающаяся тем, что сортировочный конвейер снабжен заполненным жидкостью резервуаром, в котором размещены приемный узел и узел перегрузки, выполненный в виде пирамидальной обечайки, погруженной в жидкость резервуара на высоту размещенных на ней на взаимно перпендикулярных сторонах электромагнита и устройства детектирования, при этом пирамидальная обечайка со стороны приемного узла снабжена вырезом, а устройство распознавания, сбрасыватель и бункер размещены на раздаточном узле сортировочного конвейера.
3. Линия по п. 2, отличающаяся тем, что пирамидальная обечайка выполнена из нержавеющей стали, пластика, полимера или композитного материала.
4. Линия по п. 2, отличающаяся тем, что резервуар снабжен очистной установкой.
5. Линия по п. 2, отличающаяся тем, что в жидкость добавлены очищающие средства.
6. Линия по п. 2, отличающаяся тем, что в жидкость добавлены вещества, повышающие ее плотность.
7. Способ отбраковки из металлолома /твердо/жидко/газонаполненных объектов, включающий идентификацию по типоразмеру и траектории, отличающийся тем, что идентификацию по траектории проводят в жидкости и под воздействием электромагнита, добавляют идентификацию по скорости погружения в жидкость и идентификацию по изменению температуры под воздействием нагретой жидкости, при этом все идентификации проводят параллельно и по нейронным сетям, выходные данные которых вводят в нейронную сеть по отбраковке объекта.
8. Линия по отбраковке из металлолома /твердо/жидко/газонаполненных объектов, включающая последовательно расположенные загрузочный конвейер, узел перегрузки, сортировочный конвейер, состоящий из приемного и раздаточного узлов, бункер, сбрасыватель и устройство детектирования, отличающаяся тем, что приемный узел и узел перегрузки размещены в резервуаре, заполненном жидкостью, температура которой превышает температуру металлолома не менее чем на 10 градусов, а узел перегрузки выполнен в виде пирамидальной обечайки с закрепленными с трех ее сторон: электромагнитом, устройством детектирования и тепловизором, причем резервуар снабжен электроводонагревателем, пирамидальная обечайка со стороны приемного узла снабжена вырезом, а устройство распознавания, сбрасыватель и бункер размещены на раздаточном узле сортировочного конвейера.
9. Линия по п. 8, отличающаяся тем, что пирамидальная обечайка выполнена из нержавеющей стали, пластика, полимера или композитного материала.
10. Линия по п. 8, отличающаяся тем, что резервуар снабжен очистной установкой.
11. Линия по п. 8, отличающаяся тем, что в жидкость добавлены очищающие средства.
12. Линия по п. 8, отличающаяся тем, что в жидкость добавлены вещества, повышающие ее плотность.
| СПОСОБ СОРТИРОВКИ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2517225C1 |
| Устройство для пневматической нагрузки на нажимные валики вытяжного прибора прядильных машин | 1958 |
|
SU115244A1 |
| СПОСОБ СОРТИРОВКИ МУСОРА | 2016 |
|
RU2624288C1 |
| СПОСОБ УТИЛИЗАЦИИ ГОРОДСКИХ ОТХОДОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2067027C1 |
| УСТАНОВКА ДЛЯ РАЗДЕЛЕНИЯ И ПЕРЕРАБОТКИ ТВЕРДЫХ МАТЕРИАЛОВ | 1999 |
|
RU2160166C1 |
| Гидравлическое устройство для поворачивания конвертера | 1929 |
|
SU17290A1 |
| US 3568839 A, 09.03.1971 | |||
| US 2010224537 A1, 09.09.2010. | |||

