Изобретение относится к области железнодорожного транспорта, в частности к способам контроля подшипников буксовых узлов транспортного средства в движении.
Известные способы контроля можно разделить по типу применения на несколько типов: температурные, вибрационные и остальные.
Способ мониторинга состояния буксы колесной пары по патенту RU 2258017, опубл. 10.08.2005, описывает измерение величины смещения буксы относительно лабиринтного кольца и определение состояния колесной пары. Измерение величины смещения буксы производят оптическими дальномерами при движении колесной пары путем сравнения двух измеренных линейных профилей колеса с заранее известными профилями эталонной колесной пары. По результатам сравнения делают вывод о состоянии буксы колесной буксы. В качестве одного из измеренных профилей используют наружный профиль колеса на уровне расположения буксы, а в качестве другого - профиль внутренней стороны колеса на уровне между рельсом и осью колесной пары.
К недостаткам данного способа следует отнести случайный характер измерительной выборки, который получается только во время прохождения колесной пары мимо оптических датчиков. В таком способе букса колесной пары не находится под постоянным контролем, что принципиально не может обеспечить достоверную диагностику и своевременное предупреждение возможных неисправностей.
В качестве ближайшего аналога (прототипа) может быть выбран способ контроля подшипников буксовых узлов транспортного средства в движении (RU 2361762, опубл. 20.07.2009), состоящий в измерении текущих значений температуры нагрева каждого из контролируемой группы буксовых узлов, работающих при одних и тех же внешних условиях, обработке текущих сигналов и сравнении их с пороговым значением, по превышению которого определяют наличие дефекта соответствующего буксового узла. Согласно способу одновременно замеряют текущее значение виброускорения каждого буксового узла. Способ контроля подшипников буксовых узлов транспортного средства в движении заключается в измерении текущих значений температуры нагрева каждого из контролируемой группы буксовых узлов, работающих при одних и тех же внешних условиях, обработке текущих сигналов и сравнении их с пороговым значением, по превышению которого определяют наличие дефекта соответствующего буксового узла. Согласно способу одновременно замеряют текущее значение виброускорения каждого буксового узла.
Недостатком данного способа является низкая точность контроля, обусловленная тем, что в качестве исходной информации приняты косвенные показатели безаварийной работы буксового узла, такие как температура и вибрация.
При этом диагностирование по косвенным показателям принципиально не позволяет отслеживать изменения в объекте в реальном времени, а только дают возможность регистрировать последствия этих изменений.
Целью настоящего изобретения является создание системы диагностики, обеспечивающей полную безопасность движения на железнодорожном транспорте.
Задачей настоящего изобретения является улучшение результатов диагностики буксового узла колесной пары транспортного средства в движении и повышении точности, достоверности и скорости принятия решения по текущему техническому состоянию буксового узла для обеспечения безопасности движения на транспорте.
Эта задача с достижением указанного технического результата решается применением способа контроля подшипников буксовых узлов транспортного средства в движении. Способ содержит этапы, на которых синхронно измеряют кинематические параметры и их отклонения для внутреннего подвижного кольца подшипника буксы транспортного средства, а также кинематические параметры и их отклонения прохождения тел качения подшипника буксы мимо датчика; получают значения отношения соответствующих упомянутых измеренных кинематических отношений и их отклонений; и полученные значения сравнивают с заранее заданными пороговыми значениями, по превышению которых определяют наличие дефекта соответствующего подшипника соответствующего буксового узла.
В частности, кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его угловую скорость, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их частоту.
В частности, кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его фазу, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их фазу.
В частности, кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его положение, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их положение.
В частности, кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его период вращения, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их период прохождения.
В частности, упомянутые подшипники буксы представляют собой обычные подшипники или подшипники кассетного типа.
На Фиг.1 показана блок-схема информационного канала устройства. Датчики 1, 2, 3 и 4 установлены под корпус буксы. Аналоговые сигналы передаются с датчиков по линиям связи или радиоканалам 5 в блок 6 преобразователя аналогового сигнала в цифровой частотный код, который затем поступает в блок 7 декодера положения, который определяет текущее положение всех частей механической системы и вычисляет угловые скорости ее подвижных составляющих. Эта информация сохраняется в устройстве 8 хранения на протяжении всего срока работы системы.
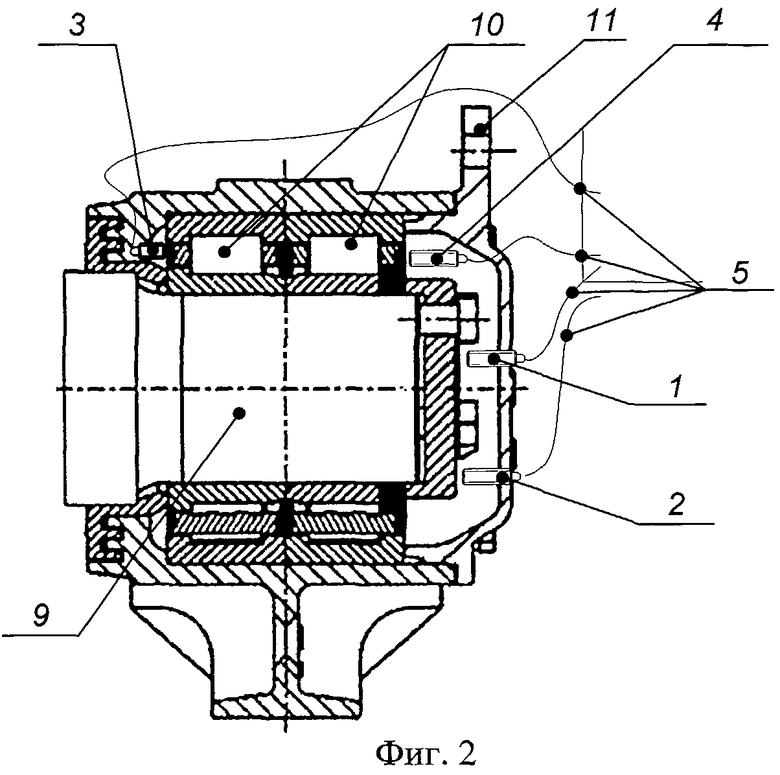
На Фиг.2 показана схема монтажа упомянутых датчиков в буксу грузового вагона. Работа системы происходит следующим образом. В начале работы датчик 1 находится в режиме опроса, а датчики 2, 3 и 4 заблокированы (или отключены). При начале движения срабатывает датчик 1, сигнал которого задает начальную точку отсчета для всей системы и дает информацию о заранее известном положении системы. При его срабатывании разблокируются датчики 2, 3 и 4. Сигнал с датчика 2, который срабатывает при вращении вала 9, преобразуется в прямоугольный импульс, передаваемый по линиям связи 5, который дает представление о положении и частоте вращения вала или о положении и частоте вращения внутреннего кольца подшипника. Сигналы с датчиков 3 и 4 передают информацию о положении тел качения 10 и их угловой скорости. Отношение полученных угловых скоростей, получаемых с датчиков 2 и 3, а также 2 и 4, и их сравнение с пороговыми значениями дают возможность оперативно и точно оценивать состояние подшипников в движении.
Под крышку буксы 11 устанавливают датчики 2, 3 и 4, один из которых (2) регистрирует положение вала 9, а два других (3 и 4) - прохождение роликов каждого из подшипников по отдельности. Сигнал от каждого датчика преобразуется в импульс (в поз.6), который приходит на схему счета импульсов (в поз.7). Количество импульсов в единицу времени определяет частоту вращения вала колесной пары 9 и частоту вращения тел качения подшипника 10. Их отношение всегда либо постоянно, либо имеет незначительные отклонения, которые связаны с взаимным изменением скоростей кольца и тел качения, например, из-за проскальзывания. Процессор делит количество импульсов от вала колесной пары и количество импульсов, соответствующие количеству тел качения подшипника, зарегистрированных датчиком за единицу времени, друг на друга, получая значение передаточного отношения.
Полученные значения передаточного отношения в каждый момент времени записываются на встроенное устройство 8 хранения информации.
Примеры реализации способа:
1) Измеряемый кинематический параметр - угловая скорость. Определено ω=20 с-1. Далее снимают показания датчика угловой скорости вращения вала с высокой точностью: ωвал=20,006 с-1, ωвал=20,0001 с-1, ωвал=20,03 с-1, … и т.д. в зависимости от количества выдаваемых датчиком отсчетов на оборот. Одновременно снимаются показания частоты прохождения тел качения подшипника мимо датчика, определяя их мгновенную частоту движения вокруг оси вращения ωподш=2,008 с-1, ωподш=2,0005 с-1, ωподш=2,013 с-1 и т.д. для каждого тела качения соответственно.
Определяется передаточное отношение: N=ωвал/ωподш, N1=20,006/2,007=9,96811, N2=20,0001/1,9985=10,00755, N3=20,03/2,018=9,92566 и т.д. соответственно.
Зная допустимый интервал работы, который берется из математического моделирования, результатов экспериментального исследования или статистики эксплуатации, проверяется значение на попадание в допускаемый интервал: например, допускаемый интервал изменения передаточного отношения ±5%. Передаточное отношение известно и определяется из геометрии: Ncp=10.
N5%=10·0,05=0,5, Границы интервала допуска: нижняя граница N-5%=Ncp-N5%=10-0,5=0,95, верхняя граница N5%=Ncp+N5%=10+0,5=10,5.
Тогда N1 и N2 - допустимые значения, характеризующие нормальную работу подшипника, a N3 - признак начала нештатной или аварийной работы подшипника.
Можно также определять отсутствие неисправности, принимая отклонения или вариации частоты вращения, т.е. фазы - Δωвал=ω-ωвал и Δωподш=ω/N-ωподш, ΔN=Δωвал/Δωподш и проверка работоспособности ΔN<N5%.
2) При измерении в качестве кинематических параметров частоты вращения величины приводятся к вышеописанным следующим образом: ω=2·π·f, где f - частота вращения вала или повторения прохождения тел качения мимо датчика. Дальнейший расчет проводят аналогично расчету, приведенному в 1).
3) При измерении в качестве кинематических параметров положения вала и тел качения подшипника проводят измерения положения через одинаковые промежутки времени и рассчитывают угловую скорость как ω=(φi+1-φi)/Δt, или не одинаковые ωi=(φi+1-φi)/(ti+1-ti). Дальнейший расчет проводят аналогично расчету, приведенному в 1).
4) При измерении в качестве кинематических параметров периоды вращения величины приводятся к вышеописанным следующим образом: ω=1/Т, где T - период вращения вала или повторения прохождения тел качения мимо датчика. Дальнейший расчет проводят аналогично расчету, приведенному в 1).
В режиме постоянной диагностики значения сверяются с допустимыми границами рабочего режима, получаемыми из математического моделирования либо экспериментально, либо обрабатываются с помощью алгоритма обработки, определяющего характер неисправностей.
Изобретение позволяет существенно улучшить точность и достоверность диагностирования текущего технического состояния подшипника, тем самым повысить безопасность движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ИЗНОСА СИСТЕМЫ КОЛЕСО-РЕЛЬС И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449910C2 |
| СПОСОБ МАКЕТНОГО МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПО РЕЛЬСОВОМУ ПУТИ И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2570477C2 |
| КОЛЕСО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2376150C1 |
| Способ акустического контроля состояния буксовых узлов движущегося поезда | 2022 |
|
RU2781416C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ БУКС ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И МЕТРОПОЛИТЕНА | 2009 |
|
RU2411150C1 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
| АДАПТИВНЫЙ МОДУЛЬНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ | 2022 |
|
RU2793289C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РОТОРНЫХ МЕХАНИЗМОВ | 2004 |
|
RU2278365C2 |
| УРАВНИТЕЛЬ СКОРОСТЕЙ ВРАЩЕНИЯ УПОРНОГО ДИСКА И КОЛЕСА | 2014 |
|
RU2582564C2 |
| СИСТЕМА ДЛЯ РЕМОНТА БУКСОВЫХ УЗЛОВ | 2020 |
|
RU2747246C1 |
Изобретение относится к области железнодорожного транспорта, в частности к способам контроля подшипников буксовых узлов транспортного средства в движении. В способе синхронно измеряют кинематические параметры и их отклонения для внутреннего подвижного кольца подшипника буксы транспортного средства, кинематические параметры и их отклонения прохождения тел качения подшипника буксы мимо датчика. Далее получают значения отношения соответствующих упомянутых измеренных кинематических отношений и их отклонений. Полученные значения сравнивают с заранее заданными пороговыми значениями, по превышению которых определяют наличие дефекта соответствующего подшипника соответствующего буксового узла. Достигается повышение точности и достоверности диагностирования текущего технического состояния подшипника. 5 з.п. ф-лы, 2 ил.
1. Способ контроля подшипников буксовых узлов транспортного средства в движении путем измерения параметров подшипника, отличающийся тем, что синхронно измеряют кинематические параметры и их отклонения для внутреннего подвижного кольца подшипника буксы транспортного средства, а также кинематические параметры и их отклонения прохождения тел качения подшипника буксы мимо датчика; получают значения отношения соответствующих упомянутых измеренных кинематических отношений и их отклонений; и полученные значения сравнивают с заранее заданными пороговыми значениями, по превышению которых определяют наличие дефекта соответствующего подшипника соответствующего буксового узла.
2. Способ по п.1, отличающийся тем, что кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его угловую скорость, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их частоту.
3. Способ по п.1, отличающийся тем, что кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его фазу, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их фазу.
4. Способ по п.1, отличающийся тем, что кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его положение, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их положение.
5. Способ по п.1, отличающийся тем, что кинематические параметры для внутреннего подвижного кольца подшипника буксы транспортного средства представляют собой его период вращения, а кинематические параметры прохождения тел качения подшипника буксы мимо датчика представляют собой их период прохождения.
6. Способ по любому из пп.1-5, отличающийся тем, что упомянутые подшипники буксы представляют собой обычные подшипники или подшипники кассетного типа.
| СПОСОБ БЕЗРАЗБОРНОГО КОНТРОЛЯ СОСТОЯНИЯ ЭЛЕМЕНТОВ РАДИАЛЬНЫХ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036453C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ | 2001 |
|
RU2209410C1 |
| EP 1197417 A1, 17.04.2002 | |||
| WO 2009076932 A2, 25.06.2009 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 2001 |
|
RU2213336C2 |

