Настоящее изобретение касается способа для измерения емкости емкостной составляющей и предназначенного для этого устройства.
Более конкретно, настоящее изобретение касается способа и устройства для точного определения емкости емкостного компонента, причем емкость является функцией физического параметра, такого как количество жидкости в резервуаре. Последующее описание является только примером, не ограничивающим изобретение.
Как известно, в некоторых электронных устройствах, используемых для определения количества жидкости в резервуаре или используемых для определения, нажата ли кнопка, используется емкостный компонент, емкость которого зависит от измеряемого количества, кроме того, используется измерительное устройство, соединенное с емкостным составляющим и предназначенное для измерения емкости и численно показывающее величину физического параметра, изменение которого приводит к изменению емкости.
Некоторые измерительные устройства, используемые для упомянутых выше целей, имеют архитектуру цифровой схемы, в которой мультивибраторный каскад соединен с емкостным компонентом и предназначен для генерации последовательности импульсов, по частоте связанных с емкостью емкостного компонента. Мультивибраторный каскад также соединен со считающим каскадом, который подсчитывает импульсы, сгенерированные мультивибраторным каскадом, и вырабатывает сигнал прерывания, когда подсчитанное число импульсов, начиная с момента получения сигнала возврата в начальное положение, достигает заранее заданный порог.
Сигнал возврата в начальное положение и сигнал прерывания вырабатываются/принимаются микропроцессором с внутренним генератором тактовых импульсов с целью измерения временного интервала между моментом выработки сигнала возврата в начальное положение и моментом получения сигнала прерывания, на основе чего определяют емкость емкостного компонента.
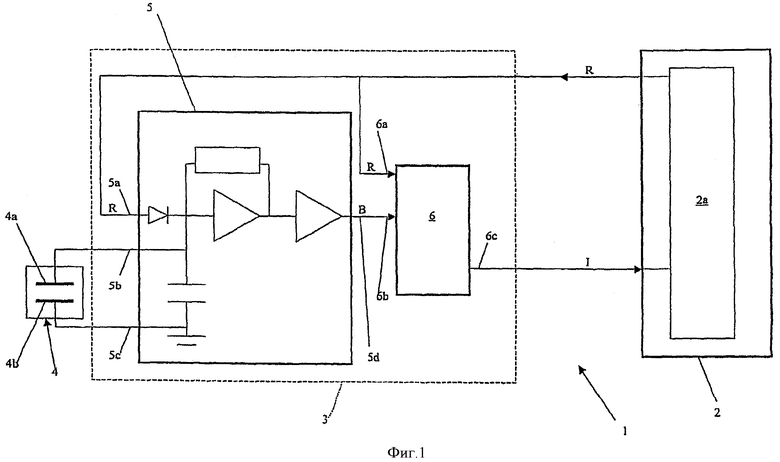
В качестве примера, не ограничивающего изобретение, на фиг.1 показано измерительное устройство 1, которое имеет описанную выше цифровую архитектуру и которое предназначено для измерения емкости емкостного компонента 4, представляющей собой, например, конденсатор. Конденсатор содержит первую пластину, вторую пластину, имеющую потенциал VGND земли; первая и вторая пластины представляют собой измерительный электрод 4а и контрольный электрод 4b соответственно измерительного устройства 1, указанные пластины обычно расположены в резервуаре с целью измерения уровня жидкости.
Более конкретно, измерительное устройство 1, по существу, содержит микропроцессорный блок 2 обработки данных, который генерирует сигнал R возврата в начальное положение, синхронизированный с моментом активации внутреннего генератора 2а тактовых импульсов и который принимает сигнал I прерывания, предназначенный для остановки внутреннего генератора тактовых импульсов; и содержит схему 3 генерирования импульсов, который в свою очередь содержит мультивибраторный каскад 5 и каскад 6 счетчика.
Более конкретно, мультивибраторный каскад 5 содержит вход 5а, предназначенный для приема сигнала R возврата в начальное положение, вход 5b, соединенный с измерительным электродом 4а; вход 5с, соединенный с контрольным электродом 4b; и выход 5d, который генерирует сигнал В переключения, представляющий собой последовательность прямоугольных импульсов D, частота которых зависит от емкости емкостного компонента 4, как показано на фиг.2.
Более конкретно, мультивибраторный каскад 5 обычно представляет собой триггер Шмидта, а считающий каскад 6 содержит вход 6а, на который поступает сигнал R возврата в начальное положение, для начала отсчета импульсов D; вход 6b, на который поступает последовательность импульсов D; и выход 6с, на котором генерируется сигнал I прерывания, когда количество импульсов D достигает заранее заданный триггерный порог Th.
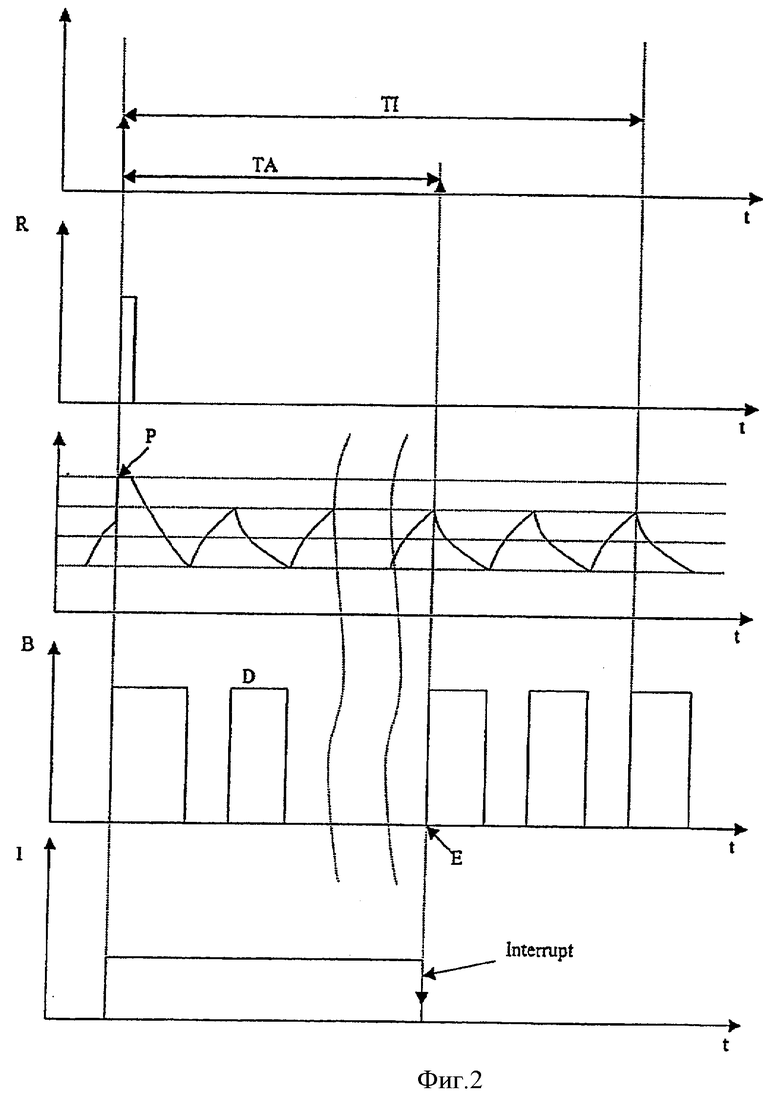
Как показано на фиг.2, емкость конденсатора 4 определяют измерительным устройством 1 с заданными интервалами TI времени, каждый из которых начинается сгенерированным микропроцессором сигналом R возврата в начальное положение.
В течение каждого интервала TI времени микропроцессор 2 активирует генератор тактовых импульсов и, в то же самое время, подает сигнал R возврата в начальное положение на мультивибраторный каскад 5 и считающий каскад 6.
Более конкретно, мультивибраторный каскад 5 принимает сигнал R возврата в начальное положение в качестве запускающего импульса, при этом мультивибраторный каскад 5 переключается из исходного положения в положение генерации колебаний (точка Р на фиг.2), в котором мультивибраторный каскад 5 генерирует импульсы D, частота которых пропорциональна емкости емкостного компонента 4.
Сигнал R возврата в начальное положение также является началом подсчета импульсов D, который осуществляется считающим каскадом 6.
Пока подсчитанное число импульсов D не превосходит заранее заданный триггерный порог Th, сигнал I прерывания находится на первом, например, высоком, логическом уровне. Наоборот, когда подсчитанное число импульсов D равно заранее заданному триггерному порогу Th (точка Е на фиг.2), сигнал I прерывания переключается на второй - в этом случае низкий логический уровень с целью остановки подсчета импульсов. В этой точке микропроцессор 2 определяет временной интервал ТА между началом и концом подсчета импульсов D и соответственно вычисляет значение емкости.
Измерительные устройства описанного выше типа особенно хорошо работают при измерении больших изменений емкости, но не так хорошо - в случае небольших изменений.
Цель настоящего изобретения состоит в том, чтобы предложить устройство и способ измерения емкости емкостного компонента, при этом измерения осуществляются с большей точностью по сравнению с существующими устройствами.
Согласно настоящему изобретению, предложено устройство и способ измерения емкости емкостного компонента, как описано в прилагаемой формуле изобретения.
Не ограничивающий изобретение вариант осуществления настоящего изобретения будет описан на примере со ссылками на приложенные чертежи, на которых:
фиг 1 - блок-схема известного устройства измерения емкости емкостного компонента;
фиг.2 - график временной зависимости сигналов, сгенерированных устройством по фиг.1, которое предназначено для измерения емкости;
фиг.3 - блок-схема устройства измерения емкости емкостного компонента, которое соответствует настоящему изобретению;
фиг.4 - график временной зависимости сигналов, сгенерированных устройством по фиг.3, которое предназначено для измерения емкости;
фиг.5 - вид, схематически показывающий один возможный вариант применения измерительного устройства по фиг.3 в устройстве измерения количества жидкости в резервуаре.
Настоящее изобретение, по существу, основано на следующем принципе:
- вырабатывают с помощью цифрового моста с двумя измерительными плечами первый сигнал, определяемый последовательностью импульсов, частота которых зависит от неизвестной измеряемой емкости, и второй сигнал, определяемый последовательностью импульсов, частота которых зависит от опорной емкости известной величины;
- вычисляют разность между временными интервалами, которые потребовались двум измерительным плечам цифрового моста для того, чтобы сгенерировать равное количество импульсов;
- определяют разность между неизвестной емкостью и опорной емкостью в виде функции от указанной разности между временными интервалами, которые потребовались двум измерительным плечам цифрового моста для того, чтобы сгенерировать равное количество импульсов; и
- вычисляют неизвестную емкость на основе опорной емкости и вычисленной ранее разности.
На фиг.3 показана блок-схема измерительного устройства 20, которое предназначено для измерения емкости емкостного компонента в соответствии с настоящим изобретением.
Более конкретно, в варианте осуществления изобретения, показанном на фиг.3, емкостный компонент 21 содержит первую пластину и вторую пластину, имеющую некоторый опорный потенциал, предпочтительно, но не обязательно, равный потенциалу VGND земли; и первая и вторая пластины представляют собой соответственно измерительный электрод 21а и опорный электрод 21b измерительного устройства 20. Измерительное устройство 20, по существу, содержит схему 23 генерирования импульсов, к которой присоединен емкостный компонент 21, емкость которого требуется измерить; схему 24 генерирования импульсов, к которой присоединен опорный емкостной компонент 25, например, конденсатор, имеющий известную постоянную опорную емкость CREF; логическую схему 26, генерирующую логический сигнал, который имеет некоторый логический уровень в течение промежутка времени, связанного, в частности пропорционального, разности ΔС между опорной емкостью CREF и измеряемой неизвестной емкостью, как подробно описано ниже; и блок 22 обработки данных, выполненный с возможностью определения измеряемой неизвестной емкости в виде зависимости от разности ΔС и значения опорной емкости CREF.
Более конкретно, в примере, показанном на фиг.3, обе схемы 23 и 24 генерирования импульсов имеют такую же цифровую архитектуру, как и схема 3 генерирования импульсов на фиг.1, то есть каждая схема содержит мультивибраторный каскад и считающий каскад.
Более конкретно, схема 23 генерирования импульсов содержит мультивибраторный каскад 23а, который предпочтительно, но не обязательно, представляет собой триггер Шмидта или любую другую аналогичную мультивибраторную схему, например, мультивибратор с двумя устойчивыми состояниями, указанный мультивибраторный каскад содержит вход 27, на который поступает сигнал R возврата в начальное положение; первый и второй входы 28, 29, соединенные соответственно с измерительным электродом 21а и опорным электродом 21b емкостного компонента 21; и выход 30, с которого подается сигнал B1 переключения, представляющий собой последовательность измерительных импульсов М, частота f1 которых зависит от емкости емкостного компонента 21.
Схема 23 генерирования импульсов также содержит считающий каскад 23b, который, в свою очередь, содержит вход 31, на который поступает сигнал R возврата в начальное положение, указанный сигнал также запускает подсчет измерительных импульсов М, выполняемый считающим каскадом 23b; вход 32, на который поступает сигнал B1 переключения; и выход 33, с которого подается сигнал I1 прерывания.
Пока подсчитанное число измерительных импульсов М не превосходит заранее заданный первый триггерный порог Th1, считающий каскад 23b переключает сигнал I1 прерывания на первый, например, высокий, логический уровень. Наоборот, когда подсчитанное число измерительных импульсов М равно заранее заданному триггерному порогу Th1 (точка F на фиг.4), считающий каскад 23b переключает сигнал I1 прерывания на второй - в этом случае низкий логический уровень с целью остановки подсчета измерительных импульсов М.
Схема 24 генерирования импульсов содержит мультивибраторный каскад 24а, который предпочтительно, но не обязательно, представляет собой триггер Шмидта или любую другую аналогичную мультивибраторную схему, например, мультивибратор с двумя устойчивыми состояниями, указанный мультивибраторный каскад содержит вход 35, на который поступает сигнал R возврата в начальное положение; первый и второй входы 36, 37, соединенные соответственно с первым и вторым входами опорного емкостного компонента 25; и выход 38, с которого подается сигнал В2 переключения, представляющий собой последовательность опорных импульсов L, частота f2 которых зависит от опорной емкости CREF опорного емкостного компонента 25.
Схема 24 генерирования импульсов также содержит считающий каскад 24b, который, в свою очередь, содержит вход 39, на который поступает сигнал R возврата в начальное положение, указанный сигнал также запускает подсчет опорных импульсов L, выполняемый считающим каскадом 23b; вход 40, на который поступает сигнал В2 переключения; и выход 41, с которого подается сигнал I2 прерывания.
Пока подсчитанное число контрольных импульсов L не превосходит заранее заданный второй триггерный порог Th2 (например, Th1=Th2), считающий каскад 24b переключает сигнал I2 прерывания на первый, например, высокий, логический уровень. Наоборот, когда подсчитанное число опорных импульсов L равно заранее заданному триггерному порогу Тh2 (точка U на фиг.4), считающий каскад 24b переключает сигнал I2 прерывания на второй - в этом случае низкий логический уровень с целью остановки подсчета опорных импульсов L.
Логическая схема 26 содержит первый и второй входы 42, 43, на которые поступают сигналы I1, I2 прерывания соответственно; и выход 44, формирующий логический сигнал ST, который находится на первом, например низком, логическом уровне в случае, когда оба сигнала I1, I2 прерывания находятся на одном и том же логическом уровне и, наоборот, находится на втором, например высоком, логическом уровне, когда сигналы I1, I2 прерывания находятся на разных логических уровнях.
Более конкретно, логическая схема 26 может содержать логическую схему «исключающее ИЛИ» или любую другую аналогичную схему.
Блок 22 обработки данных представляет собой, например, микропроцессор и на выходе генерирует сигнал R возврата в начальное положение, предназначенный для синхронизации генерации колебаний и подсчета импульсов двух схем 23 и 24 генерирования импульсов, и на входе получает логический сигнал ST.
Из продолжительности логического уровня сигнала ST блок 22 обработки данных способен определить разность ΔT времен T1 и Т2, требующихся для того, чтобы две схемы 23 и 24 генерации импульсов измерительного устройства 20 сгенерировали одинаковое количество импульсов.
На основе разности ΔT времен блок 22 обработки данных также способен определить разность ΔС между опорным емкостным компонентом 25 и емкостным компонентом 21 и также вычислить емкость емкостного компонента 21 как функцию разности ΔС емкостей и опорной емкости CREF.
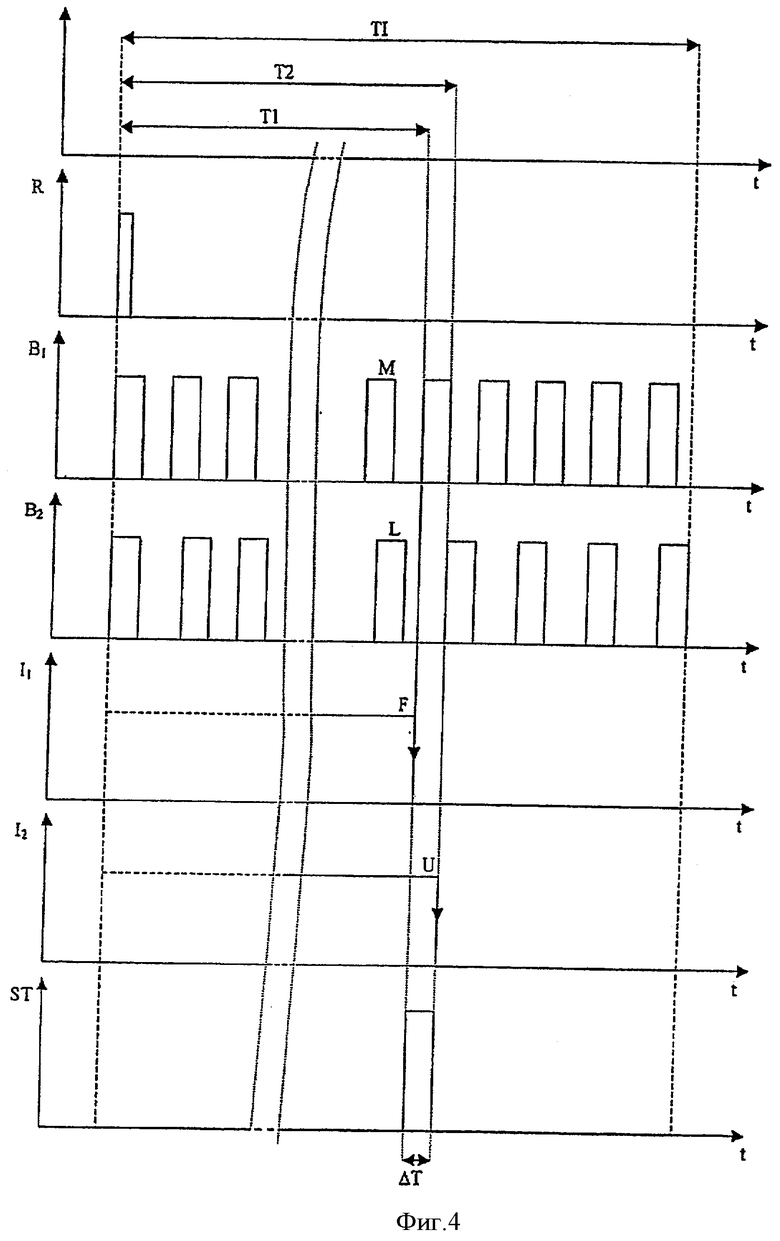
Далее со ссылкой на фиг.4 описан способ функционирования измерительного устройства 20, при этом полагается, что триггерные пороги Th1 и Th2 равны числу n импульсов - 256 импульсов, а опорная емкость CREF отличается от измеряемой неизвестной емкости и такова, что частота f2 опорных импульсов L, генерируемых схемой 24 генерирования импульсов, по существу, равна частоте f1 измерительных импульсов М, генерируемых схемой 23 генерирования импульсов.
Во-первых, блок 22 обработки данных генерирует сигнал R возврата в начальное положение, который, с одной стороны, служит в качестве триггера для активации колебаний мультивибраторных каскадов 23а и 24а и, с другой стороны, начинает подсчет импульсов считающими каскадами 23b и 24b.
Более конкретно, мультивибраторный каскад 23а генерирует импульсный сигнал B1 содержащий последовательность измерительных импульсов М с частотой f1 и, в то же самое время, мультивибратор 24а генерирует импульсный сигнал В2, содержащий последовательность опорных импульсов L с частотой f2.
На этом этапе считающие каскады 23b и 24b осуществляют подсчет соответственно измерительных импульсов М и опорных импульсов L.
Когда подсчитанное число измерительных импульсов М достигает триггерного порога Th1, считающий каскад 23b переключает сигнал I1 прерывания с высокого на низкий логический уровень и, в то же самое время, когда подсчитанное число опорных импульсов L достигает триггерного порога Тh2, считающий каскад 24b переключает сигнал I2 прерывания с высокого на низкий логический уровень.
Так как неизвестная емкость отличается от опорной емкости, то сигналы I1 и I2 прерывания переключаются в различные моменты времени.
Более конкретно, в примере, показанном на фиг.4, сигнал I1 прерывания переключается до сигнала I2 прерывания. Следовательно, в интервале между двумя переключениями, сигналы I1 и I2 прерывания находятся на различных логических уровнях, так что логическая схема 26 переключает сигнал ST с низкого на высокий логический уровень и на протяжении всего временного интервала ΔT это состояние сохраняется и заканчивается в момент переключения сигнала I2 прерывания.
Следовательно, временной интервал ΔТ представляет собой разность времени T1, которое пропорционально значению неизвестной емкости, и времени Т2, которое пропорционально значению опорной емкости CREF·
Следовательно, сигнал ST содержит прямоугольный импульс, продолжительность которого соответствует временному интервалу ΔT и который подают на блок 22 обработки данных.
Таким образом, блок 22 обработки данных определяет разность ΔС между опорной емкостью CREF и измеряемой неизвестной емкостью, в зависимости от временного интервала ΔT в соответствии с уравнением:
ΔС=f(ΔT)=ΔT/(R*K),
где R - сопротивление резистора в триггере Шмидта, К - константа.
Следовательно, блок 22 обработки данных определяет неизвестную емкость емкостного компонента 21 на основе значения опорной емкости CREF и разности ΔС емкостей.
Как показано на фиг.3, чтобы сделать измерительное устройство 20 нечувствительным к внешнему электромагнитному шуму, к входу 36 мультивибраторного каскада 24а может быть присоединен компенсирующий электрод 45, который подает на мультивибраторный каскад 24а электромагнитный шум, аналогичный электромагнитному шуму, поступающему на мультивибраторный каскад 23а от измерительного электрода 21а.
Таким образом, любые изменения сигналов I1 и I2 прерывания, происходящие из-за внешнего электромагнитного шума, являются идентичными, поскольку две схемы 23, 24 генерации импульсов имеют одинаковую конфигурацию и на них поступают одинаковые шумовые сигналы.
Более конкретно, идентичные изменения, вызванные шумом, абсолютно не влияют на измерение емкости и фактически удаляются логической схемой 26, измеряющей разность между моментами переключения сигналов I1 и I2 прерывания.
Также следует отметить, что с целью эффективной компенсации шума, схема мультивибраторного каскада 24а должна быть идентична электронной схеме мультивибраторного каскада 23а и, в то же самое время, схема считающего каскада 23b должна быть идентична электронной схеме считающего каскада 24b.
В связи со сказанным выше, следует отметить, что в показанном варианте осуществления изобретения, измерительное устройство 20 через коммутационную схему (например, мультиплексор) может быть подключено к ряду емкостных компонентов для проведения измерений. Таким образом, при надлежащей синхронизации переключения коммутационной схемы измерительное устройство 20 может проводить измерение емкостей большого числа емкостных компонентов 21.
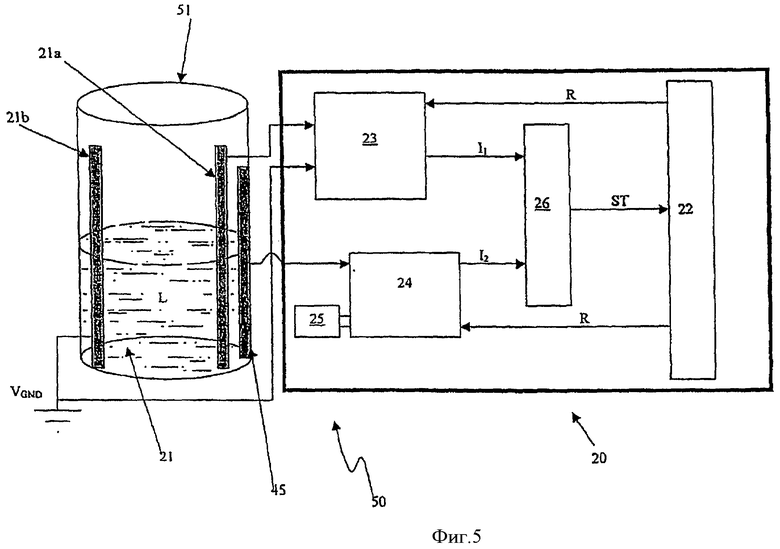
На фиг.5 показано одно возможное применение измерительного устройства 20 в устройстве 50 измерения количества жидкости L в резервуаре 51.
Более конкретно, в примере, показанном на фиг.5, емкостный компонент 21, емкость которого измеряют, содержит измерительный электрод 21а и опорный электрод 21b, которые расположены внутри или снаружи резервуара 51. Например, измерительный электрод 21а и опорный электрод 21b могут быть обращены друг к другу и расположены параллельно внутренним или внешним стенкам резервуара 51 и могут быть присоединены к резервуару 51 или являться его частью.
Предпочтительно, чтобы измерительное устройство 50 также содержало компенсирующий электрод 45, присоединенный к резервуару 51, рядом с измерительным электродом 21а, так чтобы на него подавались аналогичные шумовые сигналы и от него эти сигналы передавались на схему 24 генерации импульсов, присоединенную к компенсирующему электроду 45.
Изменение количества жидкости L в резервуаре 51 порождает соответствующее изменение емкости емкостного компонента 21, которое измеряют измерительным устройством 20, и блок 22 обработки данных в зависимости от измерения емкости, определяет соответствующее количество жидкости L в резервуаре 51.
Кроме простоты и дешевизны в изготовлении, основное достоинство описанного выше измерительного устройства 20 заключается в точном измерении как больших, так и малых изменений емкости.
Более того, благодаря использованию компенсирующего электрода 45, измерительное устройство 20 компенсирует любой входной шум, в частности на измерительном электроде, и, следовательно, указанное устройство защищено от влияния электромагнитного шума.
Ясно, что описанные устройство и способ могут быть изменены, не выходя, тем не менее, за рамки объема настоящего изобретения, определенного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНАЯ ЦЕПЬ С ДАТЧИКАМИ ИЗ ШУНТИРОВАННЫХ КОНДЕНСАТОРОВ | 2003 |
|
RU2301405C2 |
| МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТРИЧЕСКИЙ ДАТЧИК С ОБУСЛОВЛЕННЫМ ОБНАРУЖЕНИЕМ ЕМКОСТЕЙ | 2020 |
|
RU2815008C1 |
| ДАТЧИК С ЭЛЕКТРОСТАТИЧЕСКИМ МАЯТНИКОВЫМ АКСЕЛЕРОМЕТРОМ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ДАТЧИКОМ | 2014 |
|
RU2647983C2 |
| ДЕТЕКТОР КОНТАКТА С КОЖЕЙ | 2011 |
|
RU2565595C2 |
| СПОСОБ И СИСТЕМА ДЛЯ АДАПТИВНОЙ АПЕРТУРНОЙ НАСТРАИВАЕМОЙ АНТЕННЫ | 2016 |
|
RU2695283C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ МИКРОПЕРЕМЕЩЕНИЙ | 2014 |
|
RU2573618C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВЛАЖНОСТИ | 2011 |
|
RU2471178C1 |
| СПОСОБ НЕЙТРАЛИЗАЦИИ ЕМКОСТИ СВЯЗИ ЕМКОСТНОГО ДИФФЕРЕНЦИАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕЩЕНИЯ С НЕДОСТУПНЫМ ПОДВИЖНЫМ ЭЛЕКТРОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2262078C2 |
| Емкостно-электронное устройство для преобразования перемещения | 1985 |
|
SU1392338A1 |
| Способ и устройство электрического каротажа обсаженных скважин | 2018 |
|
RU2691920C1 |
Изобретение относится к электрическим измерениям неэлектрических величин. Способ измерения емкости емкостного компонента (21), характеризующийся тем, что цифровой мост с двумя измерительными плечами вырабатывает первый сигнал (B1), представляющий собой последовательность измеряемых импульсов (М), частота (f1) которых зависит от измеряемой неизвестной емкости, и второй сигнал (В2), представляющий собой последовательность измеряемых импульсов (L), частота (f2) которых зависит от известной опорной емкости (СREF); вычисляют разность (ΔT) между временными интервалами (T1 Т2), которые потребовались двум измерительным плечам цифрового моста для того, чтобы сгенерировать равное количество импульсов (Th1, Тh2); определяют разность (ΔС) между неизвестной емкостью и опорной емкостью (СREF) в виде зависимости от временной разности (ΔТ) и вычисляют неизвестную емкость емкостного компонента (21) на основе опорной емкости (СREF) и разности (ΔС) емкостей. Технический результат заключается в повышении точности измерения емкости емкостного компонента. 3 н. и 17 з.п. ф-лы, 5 ил.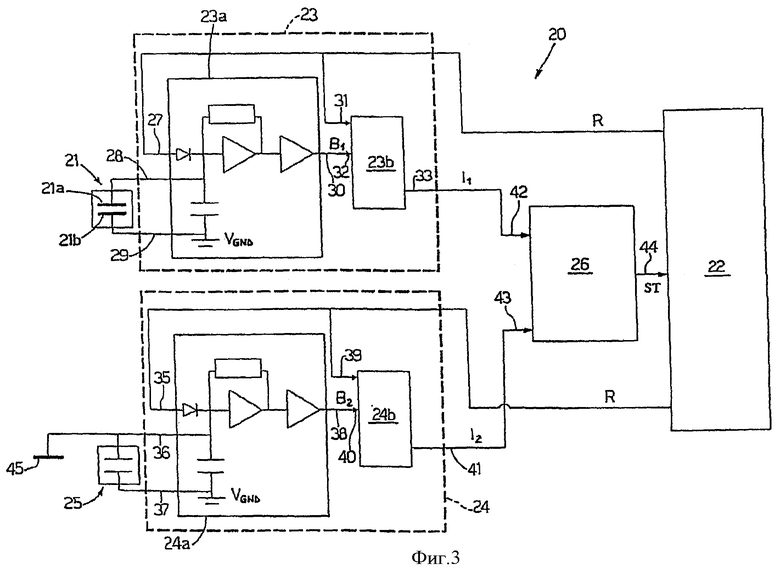
1. Измерительное устройство (20) для измерения емкости емкостного компонента (21), характеризующееся тем, что содержит: средства (23, 24) генерирования импульсов, соединенные с емкостным компонентом (21), емкость которого измеряется, выполненные с возможностью генерирования первой последовательности импульсов (М), частота (f1) которых зависит от неизвестной измеряемой емкости, и соединенные с опорным емкостным компонентом (25), который имеет известную опорную емкость (СREF); и с возможностью генерирования второй последовательности импульсов (L), частота (f2) которых зависит от указанной опорной емкости (CREF); и средства (22, 26) обработки данных, соединенные с указанными средствами (23, 24) генерирования импульсов и предназначенные для определения временной разности (ΔТ) между временными интервалами (T1 Т2), требующимися для того, чтобы первая и вторая последовательности импульсов (М, L) достигли заданного числа импульсов (Th1, Th2), и для вычисления разности (ΔС) между неизвестной емкостью и опорной емкостью (CREF) в виде зависимости от указанной временной разности (ΔT), причем средства (22, 26) обработки данных также выполнены с возможностью вычисления неизвестной емкости емкостного компонента (21) в виде зависимости от указанной разности (ΔС) емкостей и опорной емкости (СREF).
2. Измерительное устройство по п.1, характеризующееся тем, что указанные средства (23, 24) генерации импульсов содержат: первое средство (23) генерации импульсов, соединенное с емкостным компонентом (21), емкость которого измеряется, выполненное с возможностью генерации первого сигнала (I1) прерывания, когда число импульсов в указанной первой последовательности импульсов (М) удовлетворяет заданному соотношению с первым порогом (Th1); второе средство (24) генерации импульсов, соединенное с указанным опорным емкостным компонентом (25), который имеет известную опорную емкость (CREF), выполненную с возможностью генерации второго сигнала (I2) прерывания, когда число импульсов в указанной второй последовательности импульсов (L) удовлетворяет заданному соотношению со вторым порогом (Th2); указанные средства (22, 26) обработки данных, принимающие указанные первый (I1) и второй (I2) сигналы прерывания и выполненные с возможностью определения временной разности (ΔТ), соответствующей временному интервалу (ΔТ) между моментами генерации первого (I1) и второго (I2) сигналов прерывания.
3. Измерительное устройство по п.2, характеризующееся тем, что указанное первое средство (23) генерации импульсов содержит мультивибраторный каскад (23а) соединенный с указанным емкостным компонентом (21), емкость которого измеряется, и выполненный с возможностью генерации указанной первой последовательности импульсов (М), и считающий каскад (23b), принимающий импульсы (М) первой последовательности и генерирующий указанный первый сигнал (I1) прерывания; при этом указанное второе средство (24) генерации импульсов содержит мультивибраторный каскад (24а), соединенный с указанным опорным емкостным компонентом (25), выполненным с возможностью генерации указанной второй последовательности импульсов (L), и считающий каскад (24b), принимающий указанные импульсы (L) второй последовательности и генерирующий указанный второй сигнал (I2) прерывания.
4. Измерительное устройство по п.3, характеризующееся тем, что указанный мультивибраторный каскад (24а) указанного второго средства (24) генерации импульсов содержит электронную схему, аналогичную электронной схеме мультивибраторного каскада (23 а) указанного первого средства (23) генерации импульсов.
5. Измерительное устройство по п.3 или 4, характеризующееся тем, что указанный считающий каскад (24b) указанного второго средства (24) генерации импульсов содержит электронную схему, аналогичную электронной схеме считающего каскада (23b) указанного первого средства (23) генерации импульсов.
6. Измерительное устройство по п.3, характеризующееся тем, что указанный емкостной компонент (21), емкость которого измеряется, содержит первую пластину и вторую пластину, представляющие собой соответственно измерительный электрод (21а) и опорный электрод (21b) указанного измерительного устройства (20); при этом указанный мультивибраторный каскад (23а) первого средства (23) генерации импульсов содержит первый и второй выводы, соединенные соответственно с указанным измерительным электродом (21а) и указанным опорным электродом (21b).
7. Измерительное устройство по п.3, характеризующееся тем, что указанный мультивибраторный каскад (24а) второго средства (24) генерации импульсов содержит два входа, которые соединены с двумя выводами указанного опорного емкостного компонента (25); при этом указанное измерительное устройство (20) содержит, по меньшей мере, один компенсирующий электрод (45), соединенный с одним из входов указанного мультивибраторного каскада (24а) второго средства (24) генерации импульсов.
8. Измерительное устройство по п.7, характеризующееся тем, что указанный компенсирующий электрод (45) расположен рядом с указанным измерительным электродом (21а), так что один и тот же шум подается на второе средство (24) генерации импульсов и указанное первое средство (23) генерации импульсов.
9. Измерительное устройство по п.2, характеризующееся тем, что указанные средства (22, 26) обработки данных содержат логическую схему (26), принимающую указанные первый (I1) и второй (I2) сигналы прерывания для генерации логического сигнала (ST), который имеет первое логическое значение, когда первый (I1) и второй (I2) сигналы прерывания находятся на одном и том же логическом уровне, и, наоборот, имеет второй логический уровень, когда первый (I1) и второй (I2) сигналы прерывания находятся на разных логических уровнях.
10. Измерительное устройство по п.9, характеризующееся тем, что указанные средства (22, 26) обработки данных содержат блок (22) обработки данных, который принимает и обрабатывает указанный логический сигнал (ST) для определения указанной временной разности (ΔТ) и соответствующей разности (ΔС) емкостей; при этом указанный блок (22) обработки данных также определяет неизвестную емкость емкостного компонента (21), емкость которого измеряется, в виде зависимости от указанной разности (ΔС) емкостей и указанной опорной емкости (CREF).
11. Измерительное устройство (50) для измерения количества жидкости в резервуаре (51), характеризующееся тем, что содержит измерительное устройство (20) по любому из пп.1-10, при этом указанный емкостной компонент (21), емкость которого измеряют, содержит первую пластину и вторую пластины, представляющие собой соответственно измерительный электрод (21а) и опорный электрод (21b) указанного измерительного устройства (20), причем указанные пластины присоединены к резервуару (51) для формирования вместе с жидкостью в резервуаре (51) конденсатора, емкость которого измеряется в зависимости от количества жидкости в указанном резервуаре (51); при этом указанное средство (26) обработки данных указанного измерительного устройства (20) определяет количество жидкости в резервуаре (51) в виде зависимости от измеренной емкости емкостного компонента (21).
12. Измерительное устройство (50) по п.11, в котором указанный измерительный электрод (21а) и указанный опорный электрод (21b) присоединены к указанному резервуару (51) или объединены с ним.
13. Способ измерения емкости емкостного компонента (21), характеризующийся тем, что включает в себя этапы, на которых: а) соединяют указанный емкостной компонент (21), емкость которого измеряют, со средствами (23, 24) генерации импульсов для генерации первой последовательности импульсов (М), частота (f1) которых зависит от неизвестной измеряемой емкости;
б) соединяют опорный емкостной компонент (25), который имеет известную опорную емкость (СREF), с указанными средствами (23, 24) генерации импульсов для генерации второй последовательности импульсов (L), частота (f2) которых зависит от указанной опорной емкости (СREF); в) соединяют указанные средства (23, 24) генерации импульсов со средствами (22, 26) обработки данных для определения временной разности (ΔТ) между временными интервалами (T1, T2), требующимися для того, чтобы первая и вторая последовательности импульсов (М, L) достигли заданного числа импульсов (Th1, Th2); и г) вычисляют с помощью указанных средств (22, 26) обработки данных разность (ΔС) емкостей между неизвестной емкостью емкостного компонента (21) и опорной емкостью (СREF) в виде зависимости от указанной временной разности (ΔТ); д) вычисляют с помощью указанных средств (22, 26) обработки данных неизвестную емкость емкостного компонента (21) в виде зависимости от указанной разности (ΔС) и опорной емкости (СREF).
14. Способ по п.13, характеризующийся тем, что: указанный этап а) включает в себя этап, на котором соединяют указанный емкостной компонент (21) с первым средством (23) генерации импульсов для генерации первого сигнала (I1) прерывания, когда число импульсов в указанной первой последовательности импульсов (М) удовлетворяет заданному соотношению с первым порогом (Th1); указанный этап б) включает в себя этап, на котором соединяют указанный опорный емкостной компонент (25) со вторым средством (24) генерации импульсов для генерации второго сигнала (I2) прерывания, когда число импульсов в указанной второй последовательности импульсов (L) удовлетворяет заданному соотношению со вторым порогом (Тh2); указанный этап в) включает в себя этап, на котором вычисляют временную разность (ΔT) между моментами генерации первого (I1) и второго (I2) сигналов прерывания.
15. Способ по п.14, характеризующийся тем, что указанное первое средство (23) генерации импульсов содержит мультивибраторный каскад (23а), соединенный с указанным емкостным компонентом (21), емкость которого измеряют, для генерации указанной первой последовательности импульсов (М), и считающий каскад (23b), принимающий импульсы (М) первой последовательности и генерирующий указанный первый сигнал (I1) прерывания; при этом указанное второе средство (24) генерации импульсов содержит мультивибраторный каскад (24а), соединенный с указанным опорным емкостным компонентом (25) для генерации указанной второй последовательности импульсов (L), и считающий каскад (24b), принимающий указанные импульсы (L) второй последовательности и генерирующий указанный второй сигнал (I2) прерывания.
16. Способ по п.15, характеризующийся тем, что включает в себя этап, на котором обеспечивают мультивибраторный каскад (24а) указанного второго средства (24) генерации импульсов, содержащий электронную схему, аналогичную электронной схеме мультивибраторного каскада (23а) указанного первого средства (23) генерации импульсов.
17. Способ по п.15 или 16, характеризующийся тем, что обеспечивают считающий каскад (24b) указанного второго средства (24) генерации импульсов, содержащий электронную схему, аналогичную электронной схеме считающего каскада (23b) указанного первого средства (23) генерации импульсов.
18. Способ по п.15, характеризующийся тем, что указанный емкостной компонент (21), емкость которого измеряют, содержит первую пластину и вторую пластину, представляющие собой соответственно измерительный электрод (21а) и опорный электрод (21b) указанного измерительного устройства (20); при этом указанный этап а) включает в себя этап, на котором соединяют первый и второй входы указанного мультивибраторного каскада (23а) первого средства (23) генерации импульсов соответственно с указанным измерительным электродом (21а) и указанным опорным электродом (21b).
19. Способ по п.18, характеризующийся тем, что указанный мультивибраторный каскад (24а) второго средства (24) генерации импульсов содержит два входа, которые соединены с двумя выводами указанного опорного емкостного компонента (25); при этом указанный этап б) включает в себя этап, на котором соединяют, по меньшей мере, один компенсирующий электрод (45) с одним из входов указанного мультивибраторного каскада (24а) второго средства (24) генерации импульсов.
20. Способ по п.19, характеризующийся тем, что включает в себя этап, на котором размещают указанный компенсирующий электрод (45) рядом с указанным измерительным электродом (21а), так чтобы один и тот же шум подавался на первое средство (23) генерации импульсов и второе средство (24) генерации импульсов.
| DE 29916989 U1, 13.04.2000 | |||
| US 4642555 A, 10.02.1987 | |||
| US 2002008526 A1, 06.12.2007 | |||
| US 4065715 A, 27.12.1977. |

