Изобретение относится к гидроакустическим средствам обнаружения сигналов и может быть использовано для малогабаритных носителей типа подводных аппаратов, донных гидрофизических станций, радиогидроакустических буев.
Системы обнаружения шумящих объектов и определения направления на эти объекты, называют пеленгаторами. Общие принципы построения пеленгаторов гидроакустических сигналов изложены в книге [Справочник по гидроакустике / под ред. А.Е. Колесникова. Л.: Судостроение, 1988. С. 18-30]. Для одновременного обзора сектора пространства (до 360°) формируют статический веер пространственных каналов (ПК). Направление на источник сигнала определяют по направлению оси диаграммы направленности (ДН) ПК, в котором зафиксировано максимальное значение принятого сигнала, причем погрешность определения направления составляет приблизительно половину угловой ширины ДН на уровне - 3 дБ [Справочник…].
Антенна пеленгатора для обнаружения сигнала в секторе 360°, как правило, представляет собой цилиндр, по образующей которого расположены гидроакустические приемники. Для цилиндра в свободной среде максимальное количество формируемых ДН пространственных каналов равняется количеству приемников, расположенных по окружности антенны.
В авторском свидетельстве на устройство всенаправленного приема сигналов связи и опознавания гидроакустической станции [а.с. СССР № 1840778, МПК G01S 7/52, публ. 27.07.2009] представлена схема формирования статического веера ДН, а в патенте на гидроакустическую станцию для обнаружения малоразмерных объектов [патент РФ № 2680673, МПК G01S 15/04, публ. 04.12.2017] статический веер ДН формируется с помощью цилиндрической антенны. В патенте на способ обнаружения шумящих в море объектов [патент РФ № 2694782, МПК G01S 3/80, публ. 16.07.2019] рассмотрены особенности частотно-временной обработки сигнала в каждом канале пеленгатора.
Общим недостатком представленных технических решений является значительный размер раскрыва цилиндрической приемной антенны. Обозначим ширину ДН на уровне - 3 дБ как Δθ07. Если необходимо получить величину Δθ07=5° на частоте 3 кГц, диаметр цилиндра должен быть 5.89 м. При снижении частоты или при необходимости уменьшения величины Δθ07 для повышения точности пеленгования диаметр цилиндра линейно увеличивается [Смарышев М.Д. Элементы теории направленности гидроакустических антенн. СПб: Изд-во СПбГЭТУ «ЛЭТИ», 2003]. Кроме того, требуется экранирование тыльной поверхности приемников, что создает дополнительные технические проблемы для формирования ДН с высокой направленностью на низких частотах. Для построения безэкранного приемника может быть использован приемник, формирующий кардиоидную ДН [Смарышев М.Д. … с. 56-60].
Известны способ и устройство определения водолазом направления на источник звукового сигнала [патент РФ № 2439602, МПК G01S 7/52, опубл. 27.08.2011], в котором предлагается формирование «обратной» кардиоидной ДН. В этом устройстве ДН формируется двумя ненаправленными гидрофонами, центры которых размещены на расстоянии четверти длины волны несущей частоты принимаемого сигнала. Тракт формирования состоит из устройства задержки сигнала на время, равное четверти периода несущей частоты принимаемого сигнала, сумматора и усилителя с автоматической регулировкой усиления (АРУ). Причем коэффициент усиления усилителя с автоматической регулировкой усиления (АРУ) обратно пропорционален уровню управляющего сигнала. На выходе этого усилителя формируется ДН, «обратная» кардиоидной ДН, ось которой имеет направление по линии, соединяющей приемники. Однако, предложенное устройство не позволяет сформировать веер ДН.
Наиболее близким по техническим и функциональным характеристикам к предлагаемому устройству является «Малогабаритный пеленгатор гидроакустических сигналов» [Патент РФ № 2793149, МПК G01S 1/801, опубл. 29.03.2023], который принят за прототип.
Устройство-прототип содержит цилиндрическую звукопрозрачную гидроакустическую антенну, на окружности которой размещены 2N гидроакустических приемников (ГАП). Диаметр окружности D=λ/4, где λ - длина волны на средней частоте принимаемого сигнала, центры приемников находятся на одинаковом угловом расстоянии Δθ°=360/(2N) друг от друга,
Приемники соединены с 2N-канальным блоком формирования пространственных каналов, выполненным с возможностью формирования статического веера из 2N пространственных каналов (ПК) в диапазоне углов 360°, в каждом из которых формируется диаграмма направленности типа «обратная» кардиоида. Также устройство-прототип содержит 2N-канальный блок определения пеленга, где определяется ПКm, в котором зафиксировано максимальное значение принимаемого сигнала. Направление θm оси ДН этого ПК принимается как направление на источник сигнала и с помощью блока передачи значения пеленга передается на внешние устройства.
Пеленгатор, заявленный в патенте РФ № 2793149, формирует статический веер из 2N пространственных каналов при малом диаметре цилиндрической антенны. Основным недостатком представленного технического решения является малая разрешающая способность по углу, т.е. большая погрешность в определении пеленга на цель, т.к. направление на пеленгуемый источник сигнала определяется с точностью не более половины ширины ДН Δθ07. Повышения точности в устройстве-прототипе может быть достигнуто только за счет увеличения количества приемников.
Задачей изобретения является повышение точности при амплитудном методе пеленгования, используемом в режиме обнаружения сигналов с помощью статического веера ПК, без увеличения количества приемников. Технический результат изобретения заключается в существенном повышении точности пеленгования, при сохранении габаритов антенны, количества приемников и без экранирования приемников.
Для решения поставленной задачи в пеленгаторе, содержащем звукопрозрачную многоэлементную цилиндрическую гидроакустическую антенну, состоящую из N ненаправленных гидроакустических приемников An(n=1, 2, …, N) и N ненаправленных гидроакустических приемников Бn, причем фазовые центры всех 2N гидроакустических приемников равномерно размещены с угловым шагом Δθ=(360/2N)° по окружности диаметром D=λ/4, где λ - длина волны на средней частоте принимаемого сигнала; 2N-канальный блок формирования пространственных каналов, выполненный с возможностью формирования статического веера из 2N пространственных каналов (ПК), с формированием в каждом из ПК диаграммы направленности (ДН) типа «обратная» кардиоида; 2N-канальный блок выбора пространственного канала ПКm, выполненный с возможностью определения ПК с максимальным сигналом и блок формирования значения пеленга θm, соответствующего направлению максимума ДН ПКm; при этом выходы всех 2N гидроакустических приемников соединены с 2N входами блока формирования пространственных каналов, 2N выходов блока формирования пространственных каналов соединены с 2N входами блока выбора пространственного канала ПКm, а выход блока выбора пространственного канала ПКm соединен с входом блока формирования значения пеленга,
дополнительно введены
блок ключей, состоящий из 2N нормально закрытых ключей КлA1, …, КлAN, КлБ1, …, КлБN;
блок формирования управляющих сигналов;
блок сравнения;
блок памяти и блок уточнения пеленга,
при этом все 2N выходов блока формирования пространственных каналов дополнительно соединены с сигнальными входами одноименных ключей КлA1, …, КЛAN, КлБ1, … КлБN;
выход блока выбора пространственного канала ПКm дополнительно соединен с входом блока формирования управляющих сигналов;
2N выходов блока формирования управляющих сигналов соединены с управляющими входами одноименных ключей, а блок формирования управляющих сигналов выполнен с возможностью открывания двух ключей Кллев и Клпр соответствующих ПК, смежных с каналом ПКm слева (ПКлев) и справа (ПКпр);
выходы 2N ключей соединены с 2N входами блока сравнения, а его выход - с входом блока памяти;
выход блока формирования значения пеленга соединен с первым входом блока уточнения пеленга, а выход блока памяти соединен со вторым входом блока уточнения пеленга.
Технический результат изобретения - повышение точности - обеспечивается тем, что сравниваются между собой сигналы в пространственных каналах, соседних с выбранным каналом ПКm, в котором принимаемый от источника сигнал имеет максимальное значение. При этом к направлению θm вводится поправка, зависящая от разницы напряжений на выходах ПКпр и ПКлев.
Введение новых признаков обеспечивает значительное повышение точности определения направления на источник сигнала, при этом повышение точности достигается без увеличения количества приемников.
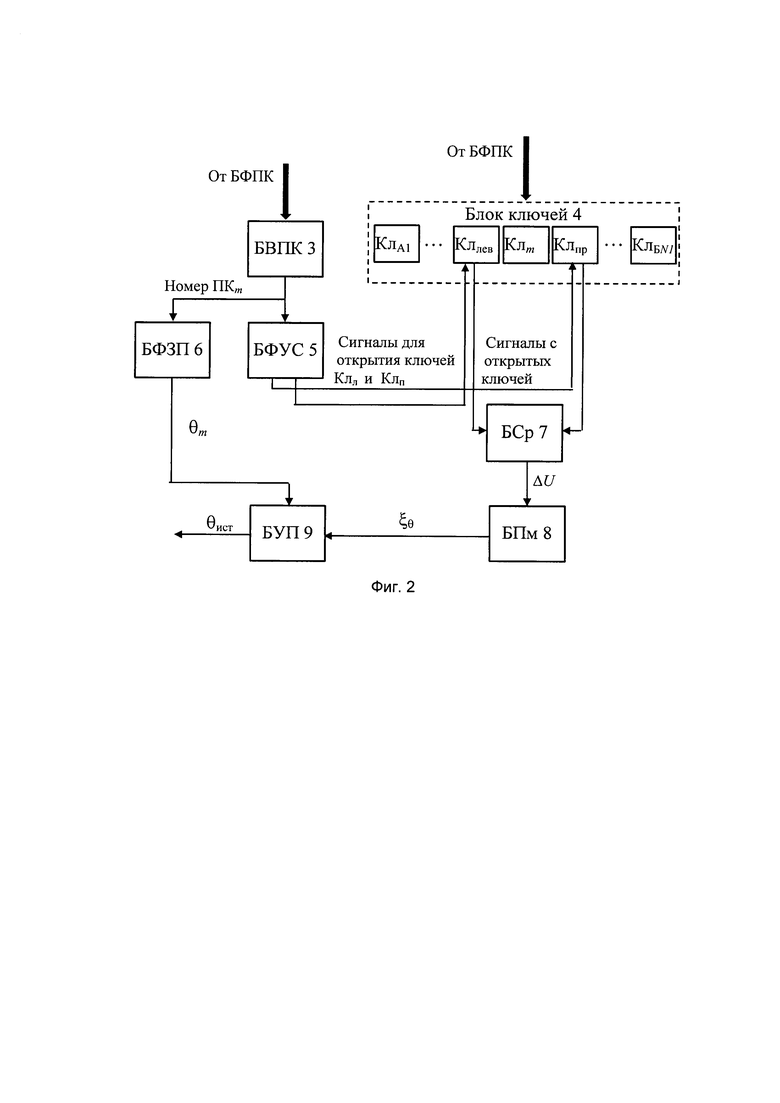
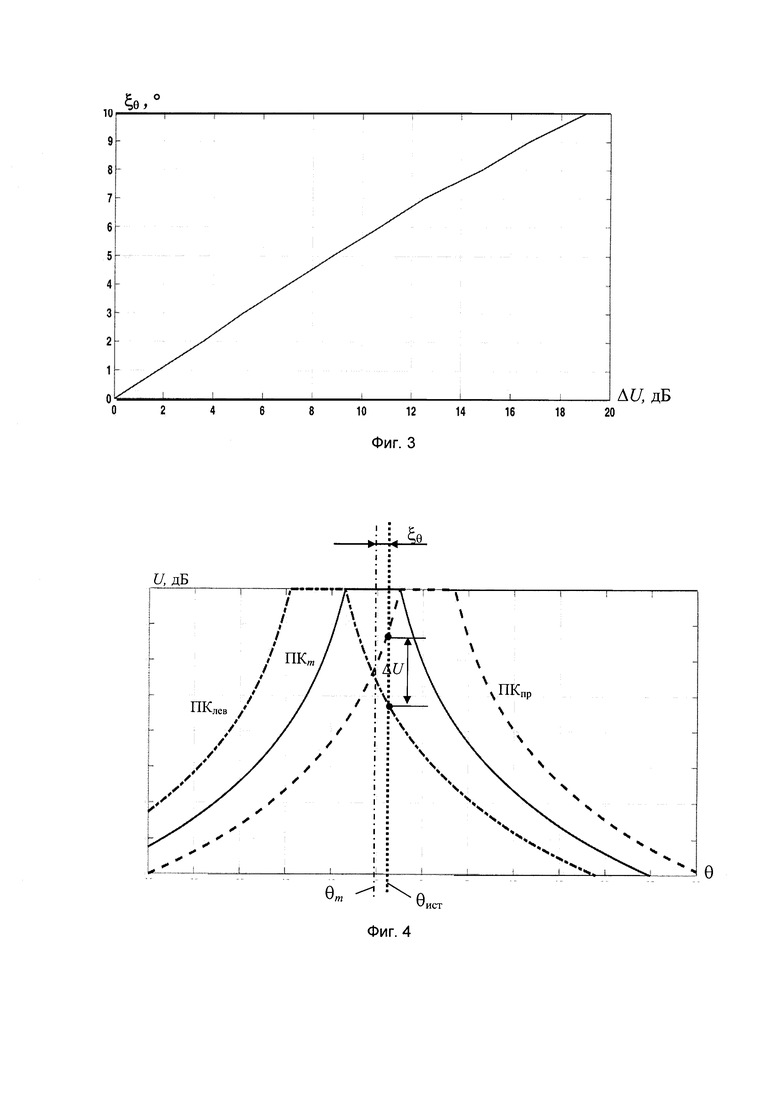
Сущность изобретения поясняется фиг. 1-4. На фиг. 1 представлена общая функциональная схема устройства; на фиг. 2 показана функциональная схема при выделении каналов ПКпр и ПКлев, сигналы которых используются для уточнения пеленга на источник. На фиг. 3 представлена зависимость, связывающая вводимую угловую поправку с разницей напряжений сигналов от источника, приходящих с пространственных каналов, соседних с каналом ПКm (для ΔU≥0), а на фиг. 4 поясняется принцип определения разности напряжений. На фиг. 4 обозначено: сплошная кривая - угловая зависимость напряжения с канала ПКm, пунктирная линия  аналогичная зависимость для правого относительно ПКm канала ПКпр, а штрих-пунктирная линия
аналогичная зависимость для правого относительно ПКm канала ПКпр, а штрих-пунктирная линия  для левого канала ПКлев.
для левого канала ПКлев.
Пеленгатор состоит из цилиндрической антенны 1 и радиотехнический части. На направляющей цилиндрической антенны расположены гидроакустические приемники ГАПAn 1An а также сдвинутые на 180° гидроакустические приемники ГАПБn 1Бn, (n=1,2, …, N). Радиотехническая часть пеленгатора включает 2N-канальный блок формирования пространственных каналов (БФПК 2), который выполнен с возможностью формирования статического веера ПК, в каждом их которых формируется ДН типа «обратная» кардиоида. БФПК 2 соединен с 2N-канальным блоком выбора пространственного канала (БВПК 3), а также каждый канал БФПК 2 соединен с сигнальными входами одноименных ключей КлАп и КлБn блока ключей 4. Выход БВПК 3 соединен с входом блока формирования управляющих сигналов (БФУС 5) и с входом блока формирования значения пеленга (БФЗП 6).
Выход БФУС 5 соединен с 2N управляющими входами блока ключей 4, при этом только по двум каналам передаются управляющие сигналы для открытия двух ключей.
Два выхода открытых ключей блока ключей 4 соединены с входами блока сравнения (БСр 7), а выход БСр 7 соединен с входом блока памяти (БПм 8).
Выход блока БФЗП 6 соединен с первым входом блока уточнения пеленга (БУП 9), а второй вход БУП 9 соединен с выходом блока БПм 8.
С выхода БУП 9 уточненное значение пеленга на источник сигнала θист передается для дальнейшей обработки.
Заявленное устройство комплектуется из известных акустических и радиоэлектронных устройств. Малогабаритные гидроакустические приемники серийно выпускаются отечественной и зарубежной промышленностью. Электронные блоки, входящие в схемы обработки, выполняются как аппаратно-программные средства, причем дополнительно введенные блок ключей 4, блок формирования управляющих сигналов 5, блок передачи значения пеленга 6, блок сравнения 7, блок памяти 8 и блок уточнения пеленга 9 целесообразно формировать на базе средств вычислительной техники
Предложенный пеленгатор работает следующим образом.
Акустический сигнал от источника принимается цилиндрической антенной 1, преобразуется в электрический сигнал и поступает на входы многоканального блока формирования пространственных каналов БФПК 2. На выходе БФПК 2 формируется массив сигналов, соответствующий статическому вееру из 2N пространственных каналов (ПК), причем в каждом канале формируется диаграмма направленности (ДН) типа «обратная» кардиоида (описание способа такого формирования и устройства, реализующего этот способ, представлено в патенте РФ № 2793149).
Массив сигналов от сформированных пространственных каналов передается в 2N-канальный блок выбора пространственного канала (БВПК 3), где из всего массива выбирается максимальный сигнал, соответствующий пространственному каналу ПКm Одновременно с передачей массива сигналов в БВПК 3 эти же сигналы передаются на сигнальные входы одноименных ключей блока ключей 4.
Из блока БФПК 3 номер канала ПКm передается в блок (см. фиг. 2) формирования управляющих сигналов (БФУС 5) и в блок формирования значения пеленга (БФЗП 6), где по номеру выбранного ПКm формируется направление на источник сигнал θm, в градусах. В блоке БФУС 5 по значению переданного номера ПКm формируются управляющие сигналы для открытия ключей в блоке ключей 4 слева и справа от ключа Клm: соответственно, ключа Кллев и ключа Клпр. Остальные ключи блока ключей 4 остаются закрытыми.
Через открытые ключи Кллев, Клпр сигналы (напряжения) с пространственных каналов ПКлев,пр попадают на входы блока сравнения БСр 7. В блоке БСр 7 формируется разность напряжений ΔU=Uпр-Uлев, где Uлев - значение напряжения из пространственного канала ПКлев, Unp - значение напряжения из пространственного канала ПКпр (все напряжения в дБ). Вычисленная разность напряжений передается на вход блока памяти БПм 8.
Блок памяти БПм 8 предназначен для того, чтобы по величине разности напряжений сигналов от правого и левого пространственных каналов относительно пространственного канала ПКm, равной ΔU и переданной на вход БПм 8, определить поправку по углу пеленгования на источник ξθ. Поправка определяется по зависимости ξθ(ΔU) [см. Кранц В.З., Островский Д.Б. Об использовании кардиоидных диаграмм направленности для пеленгования гидроакустических сигналов // Гидроакустика, 2022, вып. 51(3), с. 5-11]. Таблица значений функции, определяющей зависимость ξθ(ΔU), предварительно загружается в память блока БПм 8, что дает возможность определить поправку ξθ, соответствующую напряжению ΔU (для иллюстрации типовая зависимость поправки ξθ в градусах, от напряжения, в дБ, приведена на фиг. 3).
На фиг. 4, где представлен фрагмент веера напряжений с пространственных каналов в зависимости от угла прихода сигнала, показано, каким образом определяется величина ΔU. Как было указано, максимальное значение сигнала от источника зафиксировано в ПКm, ось ДН этого канала в направлении θm. Однако, направление на источник θист может не совпадать с θm, а находиться в угловых пределах, равных ширине максимума ДН. Представленные на фиг. 4 кривые не примыкают друг к другу, а пересекаются, откуда следует, что сигналы меньшего уровня, чем в ПКm, будут также обнаружены в каналах ПКлев и ПКпр, соответствующие уровни напряжения отмечены на линии θист точками. Точкам пересечения кривых зависимостей от угла напряжений каналов ПКпр и ПКлев с линией θист соответствуют напряжения Unp и Uлев., по которым определяется разность ΔU.
Грубое значение пеленга θm (в градусах) с выхода блока БФЗП 6 поступает на первый вход блока уточнения пеленга БУП 9; на его второй вход поступает поправка ξθ, также в градусах. Направление на источник θист определяется в блоке БУП 9 по формуле θист=θm+ξθ.
Таким образом, достигается заявленный технический эффект, состоящий в существенном повышении точности пеленгования, при этом сохраняются габариты антенны, общее количество приемников, отсутствует необходимость в экранировании приемников.
Заявленный гидроакустический пеленгатор может быть использован для наблюдения за подводной обстановкой при установке на малогабаритных носителях, где отсутствует возможность размещения антенн большого диаметра, в том числе для донных гидрофизических станций и опускаемых с вертолетов гидроакустических станций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный пеленгатор гидроакустических сигналов | 2022 |
|
RU2793149C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Способ определения местоположения объектов гидроакустической пассивной системой в условиях многомодового распространения звука | 2017 |
|
RU2667330C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| КОРАБЕЛЬНАЯ СИСТЕМА РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2004 |
|
RU2284545C2 |
| ДВУХКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2078348C1 |
| ПЕЛЕНГАТОР | 1993 |
|
RU2115133C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2115134C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2065172C1 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |

Использование: изобретение относится к гидроакустическим средствам обнаружения сигналов и может быть использовано для малогабаритных носителей типа подводных аппаратов, донных гидрофизических станций, радиогидроакустических буев. Сущность: пеленгатор состоит из цилиндрической звукопрозрачной антенны и радиотехнический части. На направляющей цилиндрической антенны расположены 2N гидроакустических приемников, которые размещены равномерно с интервалом Δθ=(360/2N)°. Сигналы от гидроакустических приемников передаются в блок формирования пространственных каналов, в котором формируется веер из 2N пространственных каналов с диаграммами направленности (ДН) типа «обратная» кардиоида. Выбирается пространственный канал с максимальным значением принятого сигнала (ПКm) и определяется направление на источник сигнала θm, соответствующее оси ДН ПКm. По разности напряжений сигналов ΔU=Unp-Uлев, принятых соседними от ПКm каналами ПКпр и ПКлев, а также по заранее введенной зависимости поправки ξθ (ΔU) определяется истинное значение на источник сигнала θист=θm+ξθ. Технический результат: повышение точности при амплитудном методе пеленгования, используемом в режиме обнаружения сигналов с помощью статического веера ПК, при сохранении габаритов антенны, количества приемников и без экранирования приемников. 4 ил.
Пеленгатор гидроакустических сигналов, содержащий звукопрозрачную многоэлементную цилиндрическую гидроакустическую антенну, состоящую из N ненаправленных гидроакустических приемников Аn (n=1, 2, …, N) и N ненаправленных гидроакустических приемников Бn, причем фазовые центры всех 2N гидроакустических приемников равномерно размещены с угловым шагом Δθ=360/2N по окружности диаметром D=λ/4, где λ - длина волны на средней частоте принимаемого сигнала; 2N-канальный блок формирования пространственных каналов, выполненный с возможностью формирования статического веера из 2N пространственных каналов (ПК), с формированием в каждом из ПК диаграммы направленности (ДН) типа «обратная» кардиоида; 2N-канальный блок выбора пространственного канала ПКm с максимальным сигналом и блок формирования значения пеленга θm, соответствующего направлению максимума ДН ПКm, при этом выходы всех 2N гидроакустических приемников соединены с 2N входами блока формирования пространственных каналов, 2N выходов блока формирования пространственных каналов соединены с 2N входами блока выбора пространственного канала ПКm, а выход блока выбора пространственного канала ПКm соединен с входом блока формирования значения пеленга, отличающийся тем, что в пеленгатор гидроакустических сигналов введены блок ключей, содержащий 2N нормально закрытых ключей КлА1, …, КлAN, КлБ1, …, КлБN, блок формирования управляющих сигналов, блок сравнения, блок памяти и блок уточнения пеленга, при этом все 2N выходов блока формирования пространственных каналов дополнительно соединены с сигнальными входами одноименных ключей КлА1, …, КлAN, КлБ1, …, КлБN; выход блока выбора пространственного канала ПКm дополнительно соединен с входом блока формирования управляющих сигналов, 2N выходов блока формирования управляющих сигналов соединены с управляющими входами одноименных ключей, а блок формирования управляющих сигналов выполнен с возможностью открывания двух ключей Клл и Клп, соответствующих ПК, смежных с каналом ПКm слева (ПКлев) и справа (ПКпр), выходы 2N ключей соединены с 2N входами блока сравнения, а его выход - с входом блока памяти, выход блока формирования значения пеленга соединен с первым входом блока уточнения пеленга, а выход блока памяти соединен со вторым входом блока уточнения пеленга.
| Малогабаритный пеленгатор гидроакустических сигналов | 2022 |
|
RU2793149C1 |
| ДВУХКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2078348C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1985 |
|
SU1840389A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море в инфразвуковом диапазоне частот | 2022 |
|
RU2795375C1 |
| US 10877124 B1, 29.12.2020. | |||

