Изобретение относится к области оптической электроники и может быть использовано в прецизионных системах обеспечения вхождения в связь, в системах точного нацеливания узких оптических лучей, системах траекторных измерений, а также в системах обеспечения устойчивости оптического канала передачи информации, размещенных на подвижных средствах.
Известно устройство (прототип) определения направления на источник оптического излучения (ИОИ) по рассеянной в атмосфере составляющей (см., например, А.Ю.Козирацкий, Ю.Л.Козирацкий, П.Е.Кулешов и др. Патент №2285275, Россия, G01S 17/06. Бюл. №28 от 10.10.06. Способ определения направления на источник оптического излучения по рассеянной в атмосфере составляющей и устройство его реализации. - М:, РОСПАТЕНТ, 2006), содержащее первый и второй оптико-электронные координаторы (ОЭК) с матричными фотоприемниками, первый и второй блоки вычитания, первый и второй квадраторы, первый и второй делители, сумматор, блок извлечения квадратного корня, первый и второй блоки вычисления arctg, выходы которых являются выходами устройства. Недостатками данного устройства являются ограниченный диапазон определения значений угловых координат ИОИ, ограниченных углом, образованным линиями (диагоналями), соединяющими крайние фотоэлементы верхней и нижней линеек ОЭК, а также жесткая привязка матриц фотоэлементов ОЭК к координатным плоскостям.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является расширение диапазона значений определяемых угловых координат ИОИ и снятие ограничений на установку ОЭК в декартовой системе координат.
Технический результат достигается тем, что в известном устройстве определения угловых координат ИОИ, включающем установленные в декартовой системе координат первый и второй оптико-электронные координаторы с матричными фотоприемниками, каждый фотоэлемент которых имеет координатную привязку в декартовой системе координат, дополнительно установлены первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой аналогово-цифровые преобразователи, микропроцессор и индикатор, при этом первый, второй, третий и четвертый выходы первого оптико-электронного координатора соединены с входами первого, второго, третьего и четвертого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессора, первый, второй, третий и четвертый выходы второго оптико-электронного координатора соединены с входами пятого, шестого, седьмого и восьмого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с пятым, шестым, седьмым и восьмым входами микропроцессора, выход которого соединен с входом индикатора.
Сущность изобретения заключается в применении двух ОЭК с матричными фотоприемниками, в которых используются помимо горизонтальных линеек фотоэлементов дополнительно вертикальные линейки фотоэлементов, осуществляющих прием рассеянного излучения под ортогональным углом к оси пучка ИОИ. Это позволяет расширить диапазон измеряемых значений угловых координат ИОИ за счет дополнительного увеличения количества фотоэлементов ОЭК и расширения сектора просмотра в поле зрения ОЭК. Применение элементов электронно-вычислительной техники для обработки сигналов ОЭК позволяет снять жесткие требования к установке ОЭК к декартовой системе координат. Это приводит к тому, что координатная привязка фотоэлементов ОЭК (с последующим внесением выбранных координат фотоэлементов в алгоритм вычисления, реализованный в микропроцессоре) может осуществляться независимо от схемы обработки сигналов. По существу, сигналы фотоэлементов ОЭК, имеющие максимальные выходные значения, являются «ключами», по которым микропроцессор обращается к внесенным (хранящимся) координатам фотоэлементов для их использования в вычислительном процессе. Поэтому предлагаемое техническое решение позволяет отказаться от блоков, включенных в устройство-прототип, функционирование которых требует жесткой привязки фотоэлементов в декартовых координатных плоскостях.
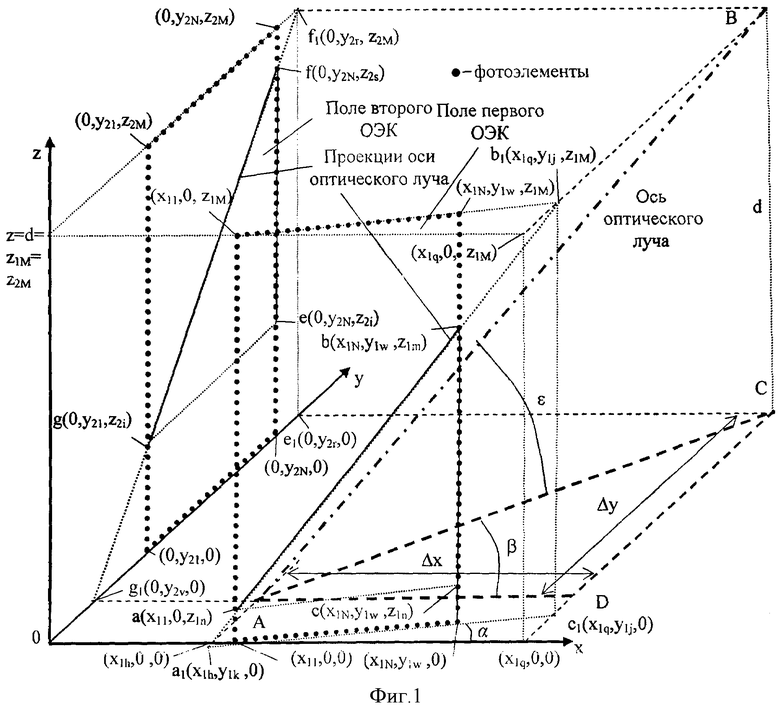
Принцип функционирования предлагаемого устройства продемонстрирован на геометрической схеме расположения ОЭК и пучка ИОИ в декартовой системе координат (фигура 1). Для наглядности в схеме фокусирующие свойства формирующей оптики не учитываются. Это позволяет представить изображение пучка ИОИ и поля матриц ОЭК соизмеримыми размерами. При этом поле матрицы фотоэлементов второго ОЭК расположено в плоскости x0z, а поле первого ОЭК повернуто относительно плоскости 0yz на угол α. Фотоэлементы ОЭК имеют координатную привязку, координаты которых известны и внесены в память микропроцессора и имеют обозначение: первый индекс указывает на принадлежность ОЭК, второй индекс - номер фотоэлемента. Матрицы фотоэлементов ОЭК одинаковы и имеют количество в вертикальных линейках M фотоэлементов, в горизонтальных линейках N фотоэлементов. Оптический пучок от ИОИ падает на плоскость xy0 таким образом, чтобы в определении угловых координат были задействованы вертикальные линейки фотоэлементов (для демонстрации тех. результата). Часть оптической оси пучка представляется в виде проекций на плоскостях матриц фотоэлементов ОЭК, задаваемые точками с координатами a(x11, 0, z1n), b(x1N, y1w, z1m), g(0, y21, z2i), f(0, y2N, z2s), где  ,
,  ,
,  ,
,  ,
,  - номер фотоэлемента по осям z и y, имеющего максимальный выходной сигнал.
- номер фотоэлемента по осям z и y, имеющего максимальный выходной сигнал.
Для определения угловых координат ИОИ согласно устройству прототипу необходимо знать длины отрезков Δx=x1H-x1B и Δy=y2H-y2B, где x1B, x1H, y2B, y2H - координаты фотоэлементов верхней и нижней линеек первого и второго ОЭК, сигнал на выходе которых имеет максимальное значение. Произведем замену вторых индексов координат x1H=x1h, x1B=x1q, y2H=y2v, y2B=y2r, где  ,
,  ,
,  ,
,  - номер координаты по осям х и y, полученных пересечением линий проекций оптической пучка и горизонтальных линек фотоэлементов. Значение искомых длин (Δx, Δy) отрезков в ситуации, представленной на фигуре 1, возможно получить с использование свойств подобных треугольников, а именно Δx из треугольников с вершинами Δa(x11, 0, z1n)b(x1N, y1w, z1m)c(x1N, y1w, z1n) и Δa1(x1h, y1k, 0)b1(x1q, y1j, z1M)с1(x1q, y1j, 0), Δy из треугольников с вершинами Δg(0, y21, z2i)f(0, y2N, z2s)e(0, y2N, z2i) и Δg1(0, y2v, 0)f1(0, y2r, d)e1(0, y2r, 0), где
- номер координаты по осям х и y, полученных пересечением линий проекций оптической пучка и горизонтальных линек фотоэлементов. Значение искомых длин (Δx, Δy) отрезков в ситуации, представленной на фигуре 1, возможно получить с использование свойств подобных треугольников, а именно Δx из треугольников с вершинами Δa(x11, 0, z1n)b(x1N, y1w, z1m)c(x1N, y1w, z1n) и Δa1(x1h, y1k, 0)b1(x1q, y1j, z1M)с1(x1q, y1j, 0), Δy из треугольников с вершинами Δg(0, y21, z2i)f(0, y2N, z2s)e(0, y2N, z2i) и Δg1(0, y2v, 0)f1(0, y2r, d)e1(0, y2r, 0), где  ,
,  - номер координаты по оси y, полученные пересечением линий проекций оптической пучка и горизонтальных линек фотоэлементов. Учитывая, что плоскость матицы первого ОЭК повернута на угол α относительно плоскости 0yz, угловые координаты ИОИ и координат центра пятна (точка A(x1h, y2v, 0)) подсвета определяются выражениями
- номер координаты по оси y, полученные пересечением линий проекций оптической пучка и горизонтальных линек фотоэлементов. Учитывая, что плоскость матицы первого ОЭК повернута на угол α относительно плоскости 0yz, угловые координаты ИОИ и координат центра пятна (точка A(x1h, y2v, 0)) подсвета определяются выражениями
 ,
,
 ,
,
 ,
,  ,
,
 ,
,
где d=z2M=z1M - расстояние между верхней и нижней линейками фотоэлементов ОЭК.
Подобные алгоритмы вычисления угловых координат ИОИ можно рассмотреть для всех возможных случаев расположения пучка ИОИ и установки ОЭК в декартовой системе координат. Реализация этих алгоритмов в микропроцессоре позволит получить искомые координаты ИОИ.
Таким образом, предлагаемое изобретение за счет дополнительного использования вертикальных (боковых) линеек фотоэлементов ОЭК и в зависимости от их установки в декартовой системе координат позволяет существенно расширить диапазон определения значений угловых координат ИОИ. Применение электронно-вычислительных технологий (микропроцессора или ЭВМ) в построении устройства снимает ограничения на строгую привязку полей матриц именно в координатных плоскостях за счет реализации вычислительного процесса оценки координат ИОИ в виде программы. Тем самым предлагаемое авторами устройство устраняет недостатки прототипа.
На фигуре 2 представлена блок-схема устройства. Блок-схема устройства содержит первый и второй ОЭК с матричными фотоприемниками 1, 2, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой аналогово-цифровые преобразователи 3, 4, 5, 6, 7, 8, 9 и 10, микропроцессор 11 и индикатор 12.
Устройство работает следующим образом. Предварительно осуществляют установку ОЭК в декартовой системе координат и координатную привязку их фотоэлементов. Координаты фотоэлементов заносятся (запоминаются) в элементах памяти микропроцессора (ЭВМ) 11. Рассеянное оптическое излучение принимается ОЭК 1, 2. С выходов ОЭК 1, 2 сигналы фотоэлементов, имеющие максимальные значения выходных сигналов, преобразуются в кодовые сигналы соответствующими аналогово-цифровыми преобразователями 3, 4, 5, 6, 7, 8, 9 и 10 и поступают в микропроцессор (ЭВМ) 11, где осуществляется вычисление координат центра пятна подсвета и угловых координат ИОИ, значения которых отображаются индикатором 12.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестно устройство определения угловых координат ИОИ, включающее установленные в декартовой системе координат первый и второй оптико-электронные координаторы с матричными фотоприемниками, каждый фотоэлемент которых имеет координатную привязку, дополнительно установленные первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой аналогово-цифровые преобразователи, микропроцессор и индикатор, при этом первый, второй, третий и четвертый выходы первого оптико-электронного координатора соединены с входами первого, второго, третьего и четвертого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессора, первый, второй, третий и четвертый выходы второго оптико-электронного координатора соединены с входами пятого, шестого, седьмого и восьмого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с пятым, шестым, седьмым и восьмым входами микропроцессора, выход которого соединен с входом индикатора.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптические и радиотехнические узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ | 2014 |
|
RU2591589C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЙ НА ИСТОЧНИКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ | 2007 |
|
RU2357272C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285275C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ | 2016 |
|
RU2657308C2 |
| Способ определения направления на источник лазерного излучения по проекции луча в плоскости наблюдения | 2022 |
|
RU2791421C1 |
| Способ определения угловых координат на источник направленного оптического излучения | 2016 |
|
RU2641637C2 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2020 |
|
RU2755733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2012 |
|
RU2516441C2 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ИЗМЕРЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2021 |
|
RU2784337C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2007 |
|
RU2340879C1 |
Изобретение относится к области оптической электроники и может быть использовано в прецизионных системах обеспечения вхождения в связь, системах точного нацеливания узких оптических лучей и др. Устройство включает первый и второй оптико-электронные координаторы с матричными фотоприемниками, каждый фотоэлемент которых имеет координатную привязку в декартовой системе координат, восемь аналогово-цифровых преобразователей, микропроцессор и индикатор. Первый, второй, третий и четвертый выходы первого оптико-электронного координатора соединены с входами первого, второго, третьего и четвертого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессора. Первый, второй, третий и четвертый выходы второго оптико-электронного координатора соединены с входами пятого, шестого, седьмого и восьмого аналогово-цифровых преобразователей соответственно, выходы которых соединены соответственно с пятым, шестым, седьмым и восьмым входами микропроцессора, выход которого соединен с входом индикатора. Технический результат - расширение диапазона значений определяемых угловых координат, снятие ограничений на установку оптико-электронных координаторов с матричными приемниками в декартовой системе координат. 2 ил.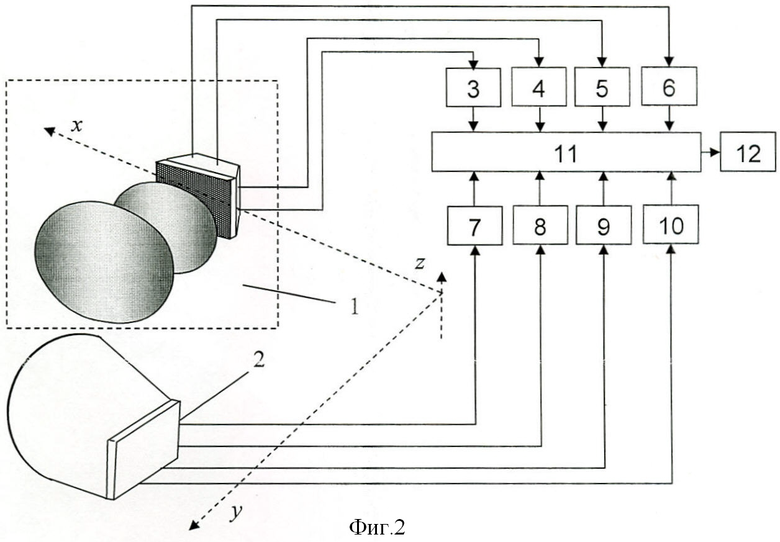
Устройство определения угловых координат источника оптического излучения, включающее установленные в декартовой системе координат первый и второй оптико-электронные координаторы с матричными фотоприемниками, каждый фотоэлемент которых имеет координатную привязку в декартовой системе координат, отличающееся тем, что дополнительно установлены первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой аналого-цифровые преобразователи, микропроцессор и индикатор, при этом первый, второй, третий и четвертый выходы первого оптико-электронного координатора соединены с входами первого, второго, третьего и четвертого аналого-цифровых преобразователей соответственно, выходы которых соединены соответственно с первым, вторым, третьим и четвертым входами микропроцессора, первый, второй, третий и четвертый выходы второго оптико-электронного координатора соединены с входами пятого, шестого, седьмого и восьмого аналого-цифровых преобразователей соответственно, выходы которых соединены соответственно с пятым, шестым, седьмым и восьмым входами микропроцессора, выход которого соединен с входом индикатора.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285275C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1996 |
|
RU2160453C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1995 |
|
RU2140659C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ДАВЛЕНИЯ В ЭКСТРУЗИОННОЙ ПЛОСКОЩЕЛЕВОЙ ГОЛОВКЕ | 2016 |
|
RU2646929C2 |

