ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение относится в целом к медицинским устройствам, и более конкретно к рукоятке, выполненной с возможностью управления дистальным инструментальным концом лапароскопического устройства.
СОСТОЯНИЕ ВОПРОСА
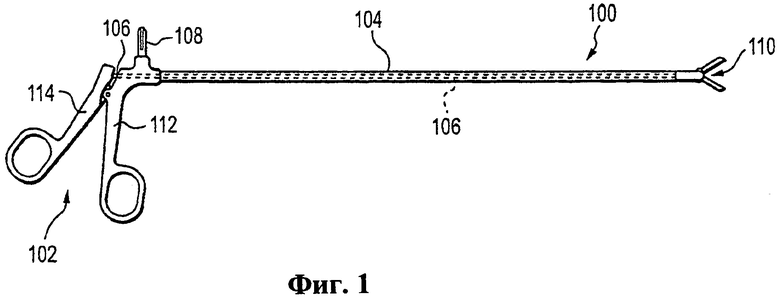
[0002] Как изображено на фиг.1, типичное монополярное электрохирургическое лапароскопическое инструментальное устройство 100 в общем случае имеет пять основных компонентов: рукоятку 102, внешний вал 104, проходящий продольно от рукоятки, стержень приведения в действие 106, проходящий через внешний вал, электрод 108, электрически соединенный со стержнем приведения в действие, и активируемый концевой исполнительный элемент 110, расположенный на дистальном конце устройства. Изображенная рукоятка 102 - "кольцевая рукоятка", которая имеет стационарную часть для пальцев 112, присоединенную к внешнему валу 104, и активируемую часть для большого пальца 114, присоединенную к стержню приведения в действие 106. Приведение в действие части для большого пальца 114, путем поворота относительно части для пальцев 112, перемещает стержень приведения в действие 106 внутри внешнего вала 104 аксиально с целью приведения в действие концевого исполнительного элемента 110. Хотя в уровне техники есть множество разновидностей каждого из вышеупомянутых компонентов, тем не менее, существует потребность в конструкциях, которые обеспечивают эффективность в процессе производства и которые своими эргономическими особенностями предоставляют хирургам и другим пользователям повышение безопасности и простоты использования. В частности, есть потребность в конструкции рукоятки, которая имеет признаки удобного в работе захвата с минимальным числом компонентов для обеспечения простоты узла и долговечности.
КРАТКОЕ РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] Варианты настоящего изобретения направлены на удовлетворение потребностей в эргономических конструкциях, которые представляют преимущества при изготовлении и использовании. Предпочтительные варианты настоящего изобретения выполнены так, что они могут стерилизоваться и многократно использоваться. Наиболее предпочтительные варианты настоящего изобретения включают храповой механизм, который смещен так, чтобы элементы рукоятки взаимодействовали друг с другом, и это могло осуществляться или отменяться использованием единственной кнопки или рычага. Это обеспечивает преимущество перед многими храповыми механизмами из предшествующего уровня техники, которые требуют приведения в действие двух или более отдельных компонентов для взаимодействия, освобождения и отмены храпового зацепления. В то время как варианты настоящего изобретения направлены на аспекты рукоятки для лапароскопического хирургического устройства, специалистам будет понятно, что варианты рукоятки настоящего изобретения могут использоваться с различными конструкциями валов и различными концевыми исполнительными элементами (например, иглодержателями, зажимами, ножницами, диссекторами, захватами) и что такое использование находится в рамках настоящего изобретения.
[0004] В одном аспекте настоящее изобретение включает хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом. Рукоятка включает кольцевой элемент для большого пальца, связанный с возможностью поворота с кольцевым элементом для пальцев (кольцевым пальцевым элементом), первый элемент зацепления, фиксированный в и выступающий в целом дистально из кольцевого элемента для большого пальца, второй элемент зацепления, установленный с возможностью поворота на и выступающий в целом проксимально из кольцевого элемента для пальцев (с первой концевой частью второго элемента зацепления, смещенного в зацепление с первым элементом зацепления), и удлиненный кулачковый элемент, с возможностью поворота связанный с кольцевым элементом для пальцев. Рукоятка включает рабочий контакт удлиненного кулачкового элемента со второй концевой частью второго элемента зацепления такой, что, когда удлиненный кулачковый элемент находится под первым углом относительно второго элемента зацепления, этот рабочий контакт является достаточным, чтобы повернуть второй элемент зацепления для преодоления смещенного взаимодействия второго элемента зацепления с первым элементом зацепления. А когда удлиненный кулачковый элемент находится под вторым углом относительно второго элемента зацепления, рабочий контакт достаточен, чтобы повернуть второй элемент зацепления для преодоления смещенного взаимодействия второго элемента зацепления с первым элементом зацепления, и достаточен для выведения из зацепления второго и первого элементов зацепления.
[0005] В другом аспекте настоящее изобретение включает хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом, в котором рукоятка включает первый элемент рукоятки, связанный с возможностью поворота со вторым элементом рукоятки, и храповой механизм, подвижно взаимодействующий с первым и вторым элементами рукоятки. Храповой механизм включает зубчатый храповой элемент зацепления, фиксированный на и выступающий в целом дистально из первого элемента рукоятки, L-образный элемент защелки, имеющий часть лапки кулачка и часть лапки защелки, в целом перпендикулярную части лапки кулачка. L-образный элемент защелки установлен с возможностью поворота во втором элементе рукоятки так, что часть лапки защелки выступает в целом проксимально из второго элемента рукоятки, а верхняя область части лапки кулачка включает в целом вертикальную криволинейную поверхность и дистально выступающую криволинейную поверхность. Пружина смещения установлена во втором элементе рукоятки и формирует рабочий контакт с L-образным элементом защелки так, что проксимальная концевая область части лапки смещается во взаимодействие с зубчатым храповым элементом зацепления. Храповой механизм также включает кулачковый рычаг, который с возможностью поворота связан со вторым элементом рукоятки. Кулачковый рычаг имеет состояние первого рабочего контакта с L-образным элементом защелки такое, что, когда кулачковый элемент расположен под первым углом относительно L-образного элемента защелки, первый рабочий контакт между кулачковым рычагом и дистально выступающей криволинейной поверхностью достаточен для поворота L-образного элемента защелки с тем, чтобы преодолеть смещенное взаимодействие части лапки защелки с зубчатым храповым элементом зацепления. А когда кулачковый рычаг расположен под вторым углом относительно L-образного элемента защелки, второй рабочий контакт между кулачковым рычагом и в целом вертикальной криволинейной поверхностью достаточен для поворота L-образного элемента защелки, с тем чтобы преодолеть смещенное взаимодействие части лапки защелки с зубчатым храповым элементом зацепления, причем второй рабочий контакт также достаточен, чтобы сместить L-образный элемент защелки на угол, в котором часть лапки защелки не взаимодействует с зубчатым храповым элементом зацепления.
[0006] В еще одном аспекте настоящее изобретение включает храповой механизм с единственной кнопкой освобождения/отмены для рукоятки хирургического устройства. Храповой механизм с единственной кнопкой освобождения/отмены включает элемент кулачковой кнопки, элемент защелки в рабочем контакте с элементом кулачковой кнопки, элемент смещения и храповой элемент. Он выполнен так, что, когда механизм находится в состоянии храпового зацепления, элемент кулачковой кнопки находится в нейтральном первом положении, при этом рабочий контакт минимален, и элемент смещения смещает элемент защелки во взаимодействие с храповым элементом. Когда механизм находится в освобожденном от храпового зацепления состоянии, элемент кулачковой кнопки находится во втором положении таком, что рабочий контакт сопротивляется смещению элемента смещения и освобождает элемент защелки из зацепления с храповым элементом. А когда механизм находится в состоянии храпового зацепления, элемент кулачковой кнопки находится в третьем положении таком, что рабочий контакт смещает элемент защелки из зацепления с храповым элементом.
[0007] В еще одном аспекте настоящее изобретение включает хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом, в котором рукоятка включает первый элемент рукоятки, с возможностью поворота связанный со вторым элементом рукоятки; и храповой механизм, с возможностью перемещения взаимодействующий с первым и вторым элементами рукоятки. Первый элемент рукоятки включает множество рельефных выступов для захвата большим пальцем, расположенных на верхней проксимальной поверхности первого элемента рукоятки, при этом выступы выполнены для обеспечения фрикционной поверхности захвата. В еще одном аспекте настоящее изобретение включает хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом, в котором рукоятка включает первый элемент рукоятки, с возможностью поворота связанный со вторым элементом рукоятки; и храповой механизм с возможностью поворота взаимодействующий с первым и вторым элементами рукоятки. Первый элемент рукоятки включает множество рельефных выступов для захвата большим пальцем, расположенных на промежуточной боковой поверхности первого элемента рукоятки, при этом выступы сформированы для обеспечения фрикционной поверхности захвата.
[0008] В еще одном аспекте настоящее изобретение включает способ использования хирургического инструмента. Способ включает операции: (а) обеспечение хирургического инструмента, имеющего рукоятку, в котором рукоятка хирургического инструмента включает кольцевой элемент для большого пальца, с возможностью поворота связанный с кольцевым элементом для пальцев, храповой зубчатый рычаг, фиксированный на и выступающий вообще дистально из кольцевого элемента для большого пальца, L-образный элемент защелки, с возможностью поворота прикрепленный к кольцевому элементу для пальцев и имеющий первую концевую часть, выступающую по существу проксимально из кольцевого элемента для пальцев, и кулачковый рычаг, который с возможностью поворота связан с пальцевым кольцевым элементом и который включает рабочий контакт со второй концевой частью элемента защелки, в котором первая концевая часть элемента защелки пружинно смещена пружиной во взаимодействие с зубчатым храповым рычагом, когда кулачковый рычаг расположен под подразумеваемым первым углом относительно пальцевого кольцевого элемента; (b) поворот кулачкового рычага на второй угол относительно пальцевого кольцевого элемента такой, что рабочий контакт является достаточным для поворота элемента защелки с тем, чтобы преодолеть смещение пружины и освободить зацепление первой концевой части элемента защелки с зубчатым храповым рычагом.
[0009] В еще одном аспекте настоящее изобретение включает хирургический инструмент, имеющий механизм храповой рукоятки с особенностью, состоящей в единственной кнопке освобождения/отмены, в котором храповой механизм рукоятки включает первый элемент зацепления, второй элемент зацепления, с возможностью поворота прикрепленный к части рукоятки и выступающий в направлении первого элемента зацепления (с первой концевой частью второго элемента зацепления, смещаемого в зацепление с первым элементом зацепления), и кулачковую кнопку, связанную с возможностью поворота с частью рукоятки и включающую рабочий контакт со второй концевой частью второго элемента зацепления. Механизм выполнен таким образом, что когда кулачковая кнопка находится под первым углом относительно второго элемента зацепления, рабочий контакт является достаточным для поворота второго элемента зацепления с тем, чтобы преодолеть смещенное взаимодействие второго элемента зацепления с первым элементом зацепления, а когда кулачковая кнопка расположена под вторым углом относительно второго элемента зацепления, рабочий контакт достаточен, чтобы повернуть второй элемент зацепления для преодоления смещенного взаимодействия второго элемента зацепления с первым элементом зацепления и достаточен, чтобы сместить второй элемент зацепления из зацепления с первым элементом зацепления.
[0010] В другом аспекте настоящее изобретение включает хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом. Рукоятка включает кольцевой элемент для большого пальца, связанный с возможностью поворота с пальцевым кольцевым элементом, зубчатый первый элемент зацепления, включаемый кольцевым элементом для большого пальца, второй элемент зацепления, установленный с возможностью поворота в пальцевом кольцевом элементе, первую концевую часть второго элемента зацепления, смещаемую во взаимодействие с зубчатым первым элементом зацепления, и удлиненный кулачковый элемент, подвижно связанный с пальцевым кольцевым элементом. Кулачковый элемент включает рабочий контакт со второй концевой частью второго элемента зацепления. Рукоятка выполнена таким образом, что когда удлиненный кулачковый элемент находится в первом положении относительно второго элемента зацепления, рабочий контакт является достаточным для перемещения второго элемента зацепления так, чтобы рабочий контакт обеспечивал силу, достаточную для преодоления смещенного взаимодействия второго элемента зацепления с зубчатым первым элементом зацепления, а когда удлиненный кулачковый элемент находится во втором положении относительно второго элемента зацепления, рабочий контакт достаточен для перемещения второго элемента зацепления с тем, чтобы преодолеть смещенное взаимодействие второго элемента зацепления с первым элементом зацепления, и достаточен, чтобы сместить второй элемент зацепления из зацепления с первым элементом зацепления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Фиг.1 - лапароскопическое инструментальное устройство из
предшествующего уровня техники;
[0012] Фиг.2 показывает лапароскопическое устройство, включающее первый вариант рукоятки настоящего изобретения;
[0013] Фиг.2А - изображение первого варианта рукоятки, частично разобранной;
[0014] Фиг.2В - продольное сечение первого варианта рукоятки по линии 2-2 с фиг.2, иллюстрирующее держатель;
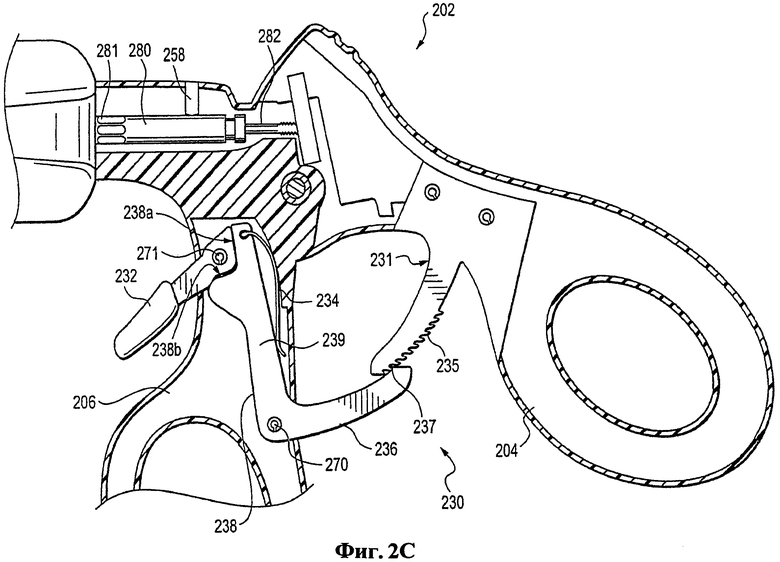
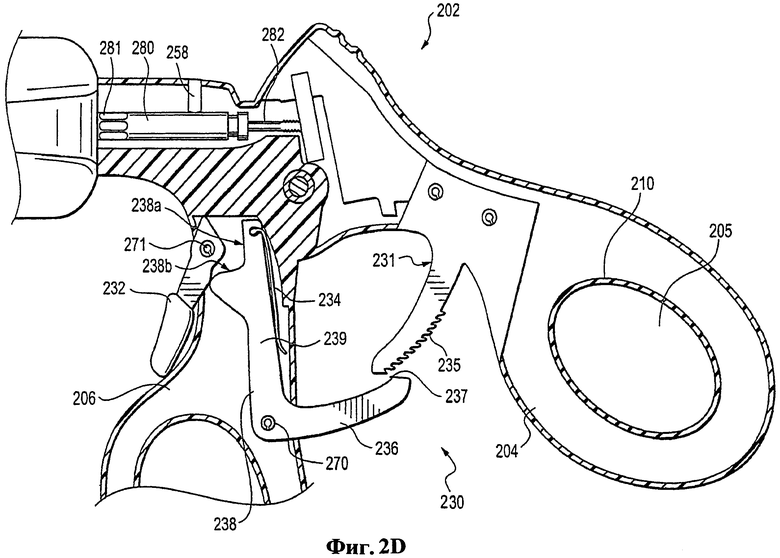
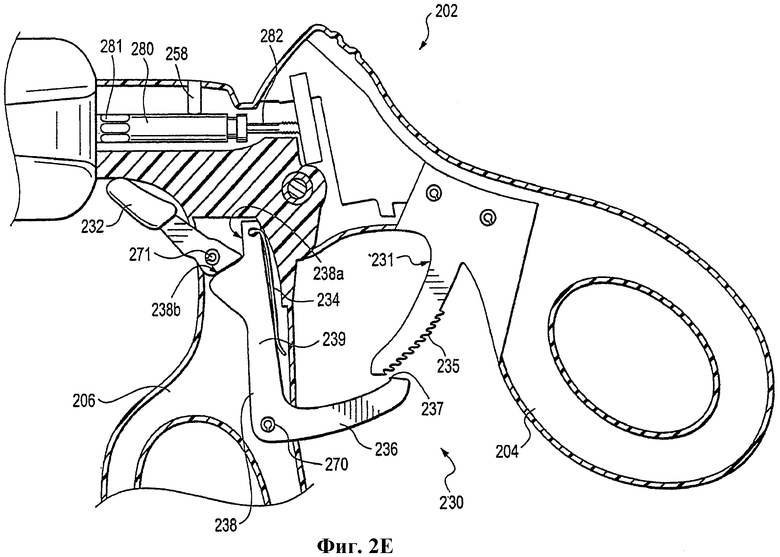
[0015] Фиг.2С-2Е изображают, соответственно, храповик в зацепленном, освобожденном и захваченном состояниях для первого варианта рукоятки в продольном сечении по линии 2-2 с фиг.2;
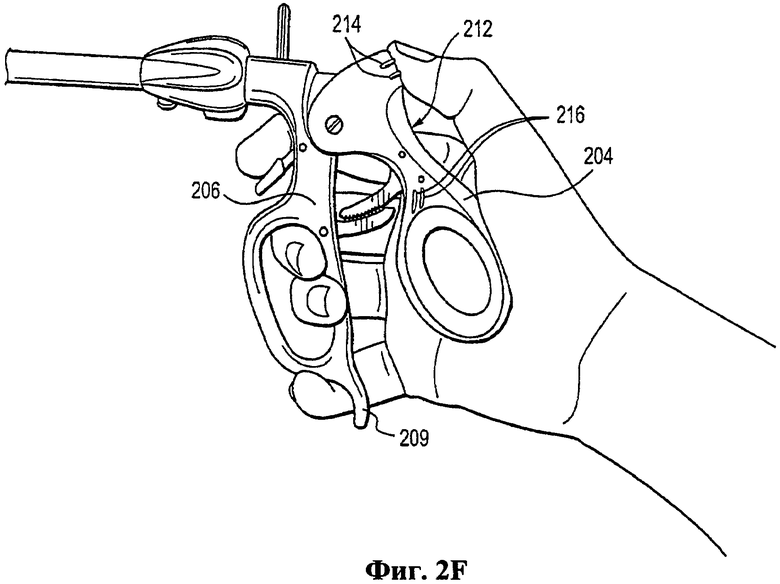
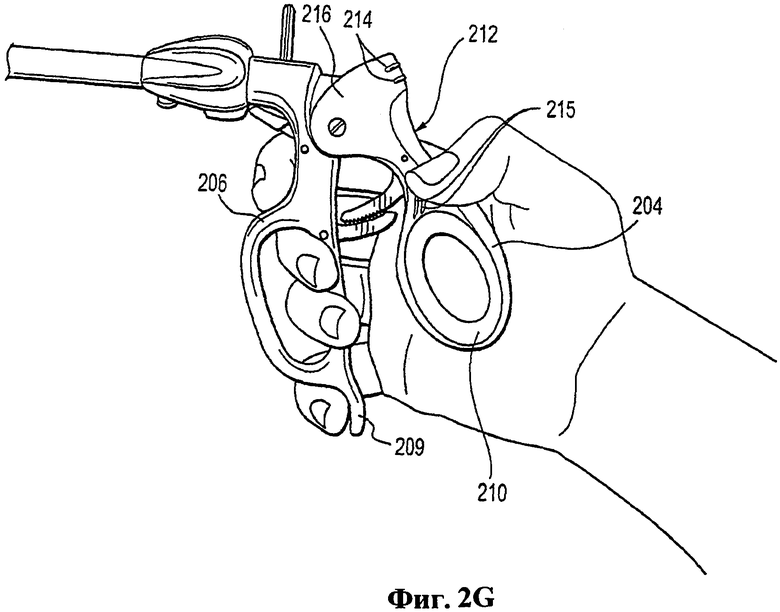
[0016] Фиг.2F-2G показывают альтернативные положения захвата пользователя, с использованием вариантов рукоятки настоящего изобретения;
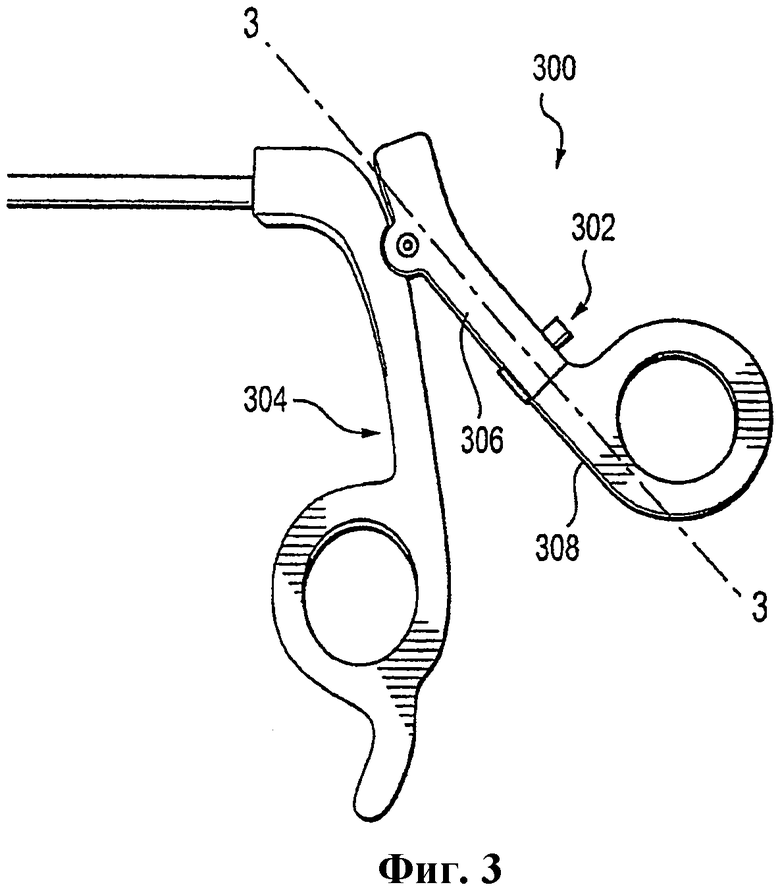
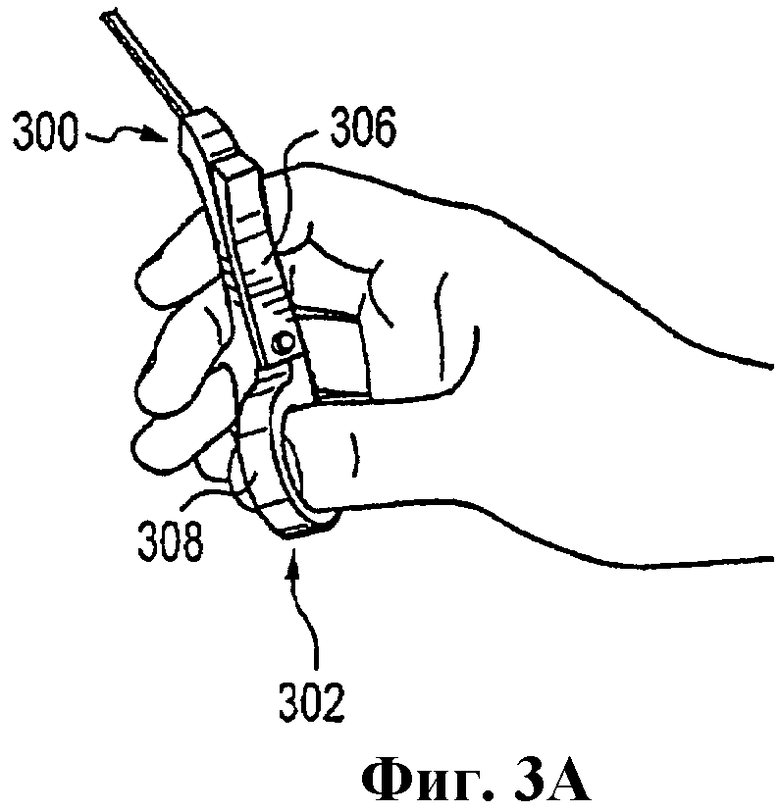
[0017] Фиг.3-3А иллюстрируют первый вариант рукоятки с повернутым большим пальцем;
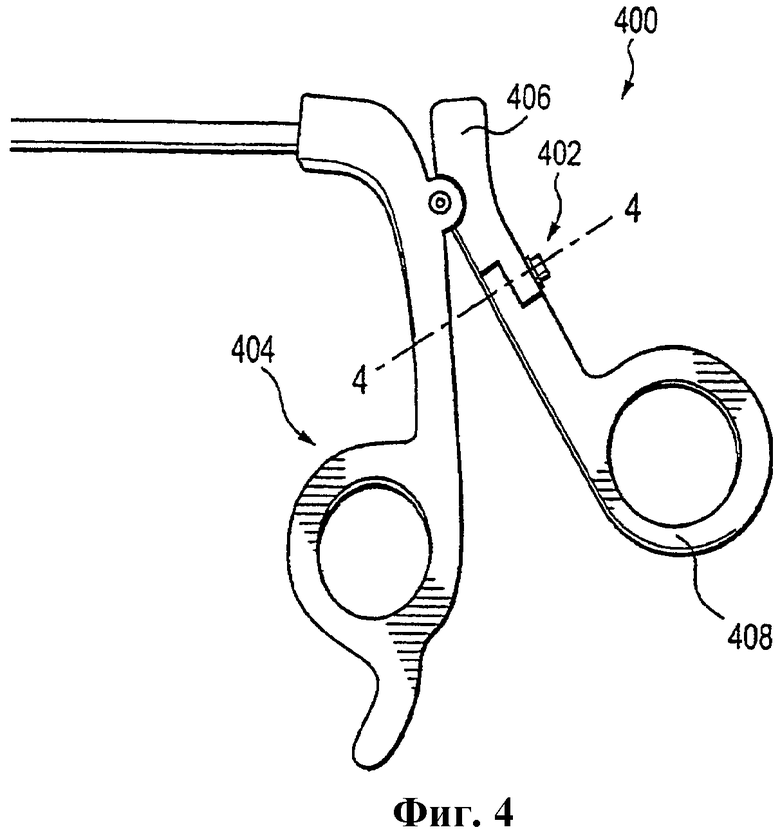
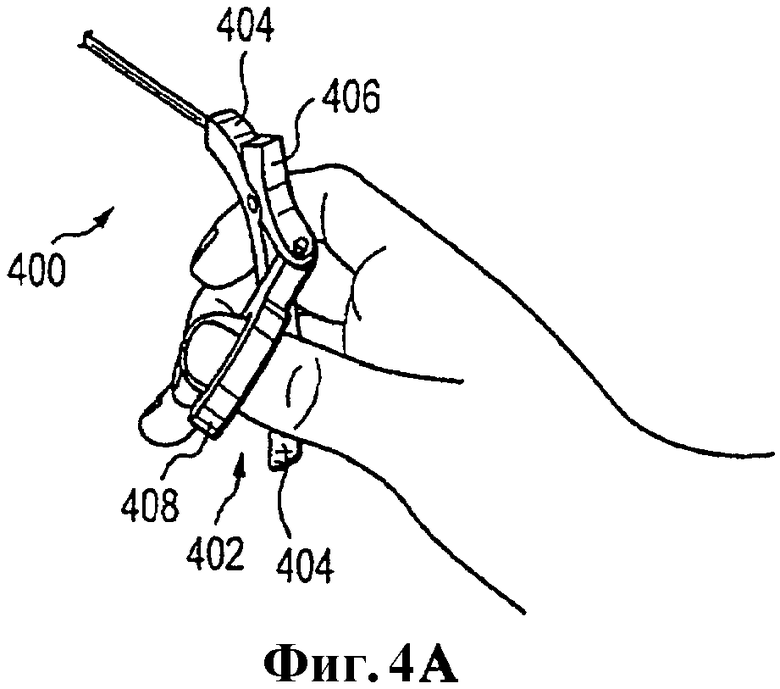
[0018] Фиг.4-4А иллюстрируют второй вариант рукоятки с повернутым большим пальцем;
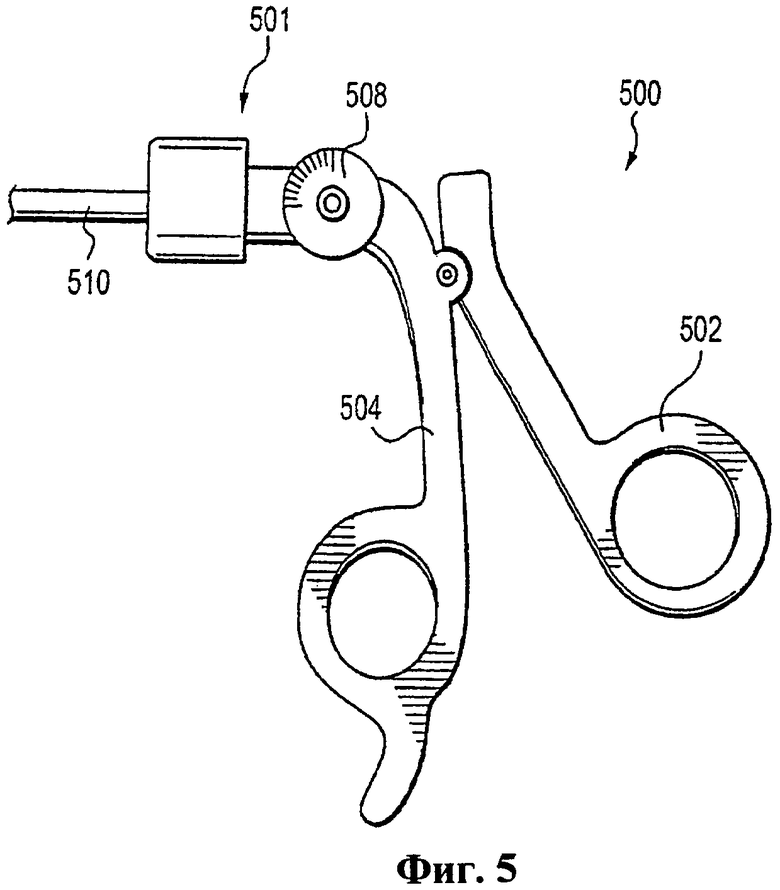
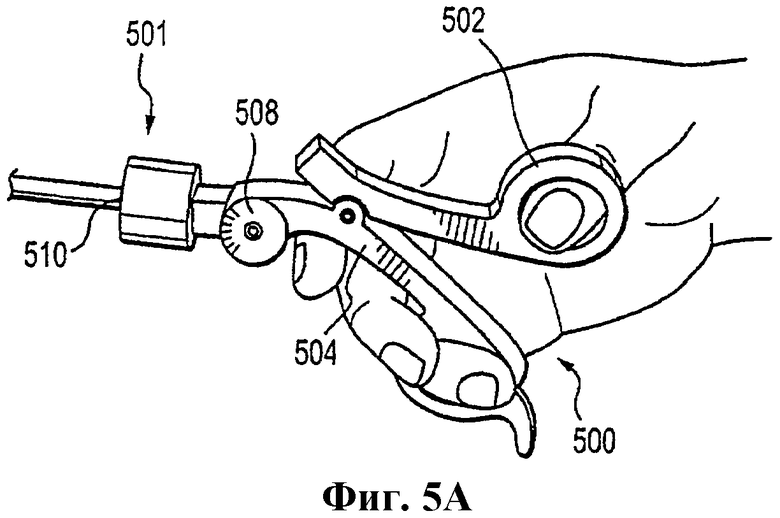
[0019] Фиг.5-5А иллюстрируют встроенный/традиционный преобразуемый вариант рукоятки;
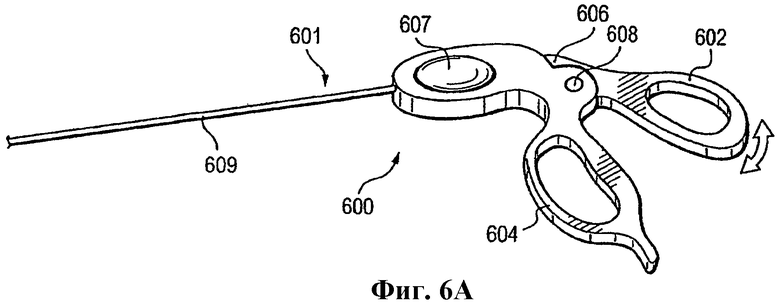
[0020] Фиг.6А-6С изображают другие варианты внешнего выполнения рукоятки;
[0021] Фиг.7-7А показывают первый вариант храповой рукоятки;
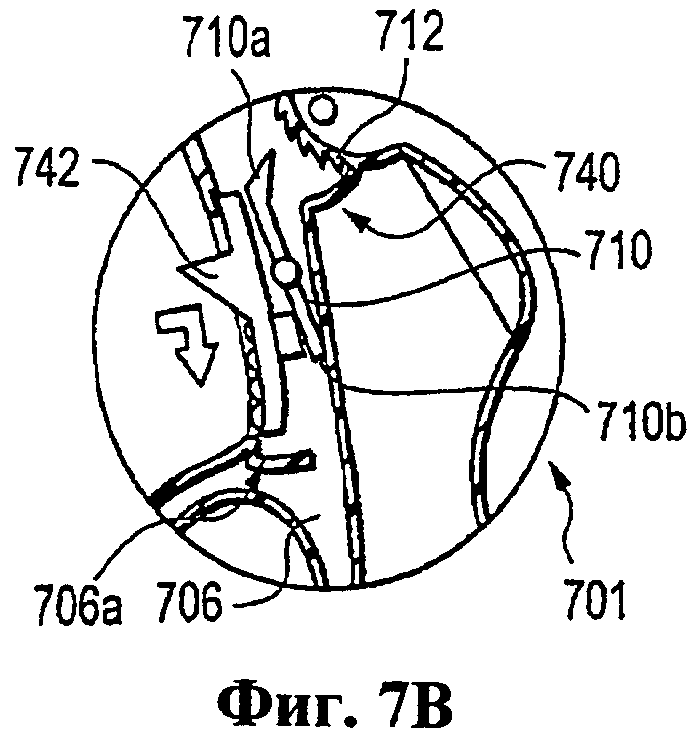
[0022] Фиг.7В иллюстрирует второй вариант храповой рукоятки;
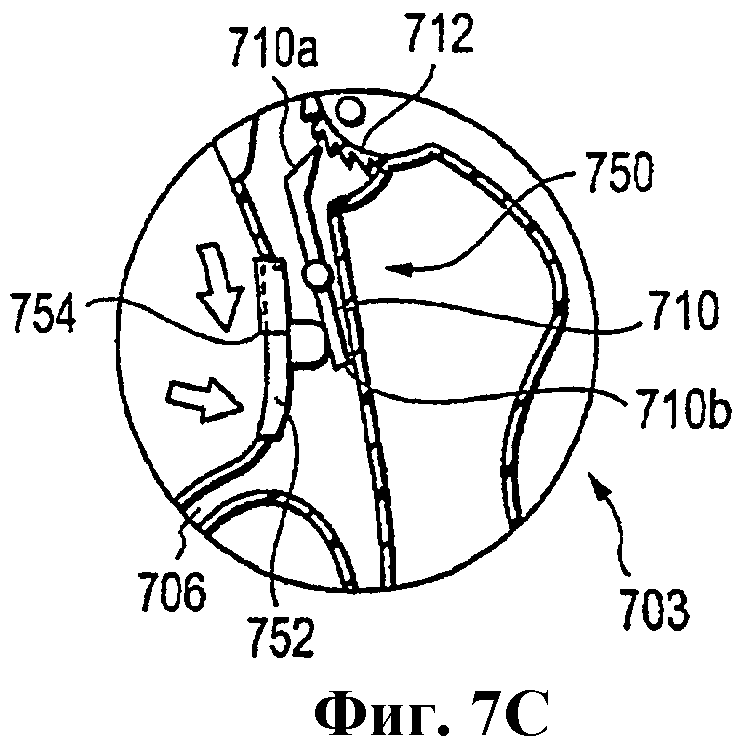
[0023] Фиг.7С иллюстрирует третий вариант храповой рукоятки;
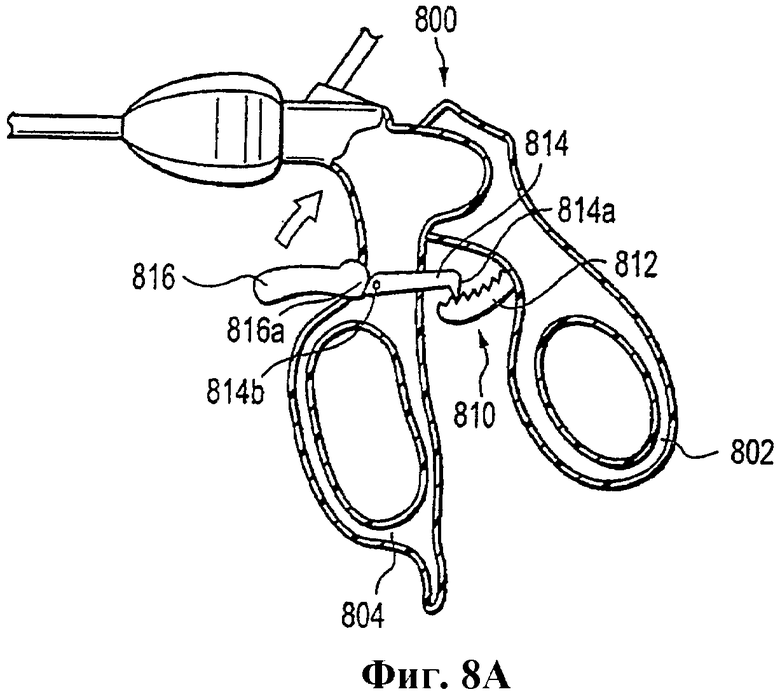
[0024] Фиг.8А-8В изображают рукоятку, заключающую четвертый вариант храпового механизма;
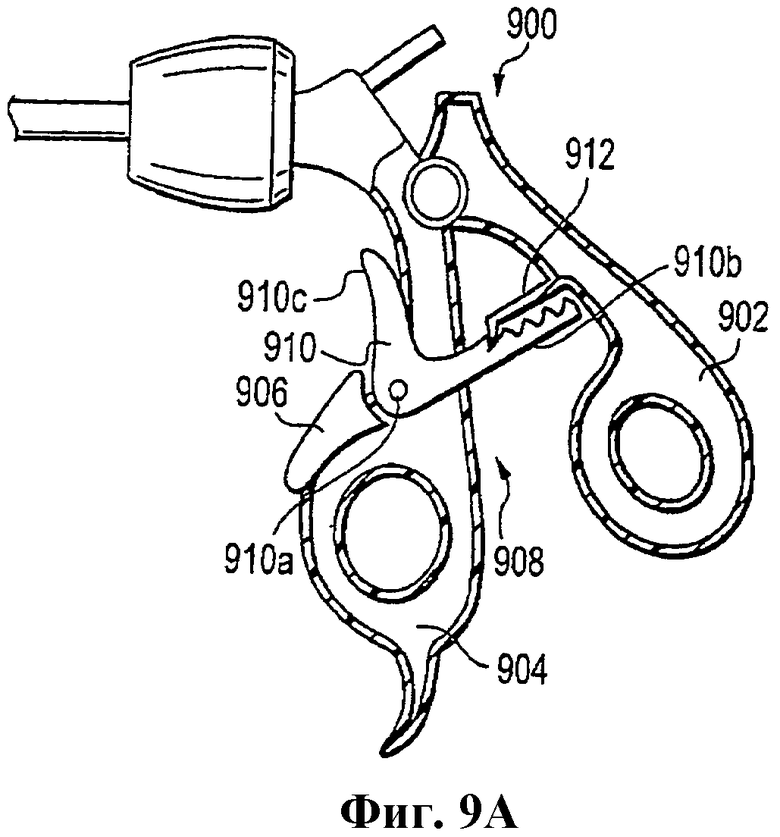
[0025] Фиг.9А-9С показывают рукоятку, включающую пятый вариант храпового механизма;
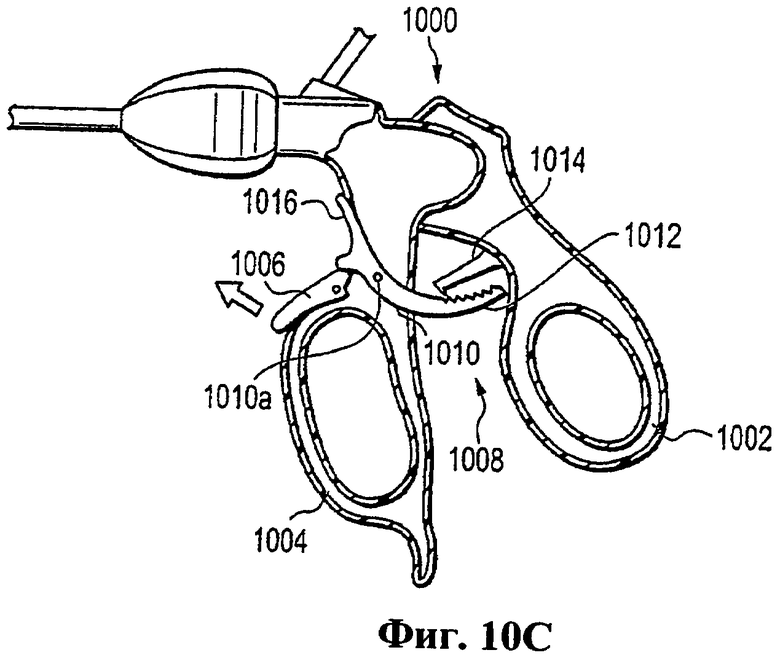
[0026] Фиг.10А-10С иллюстрируют рукоятку, заключающую шестой вариант храпового механизма;
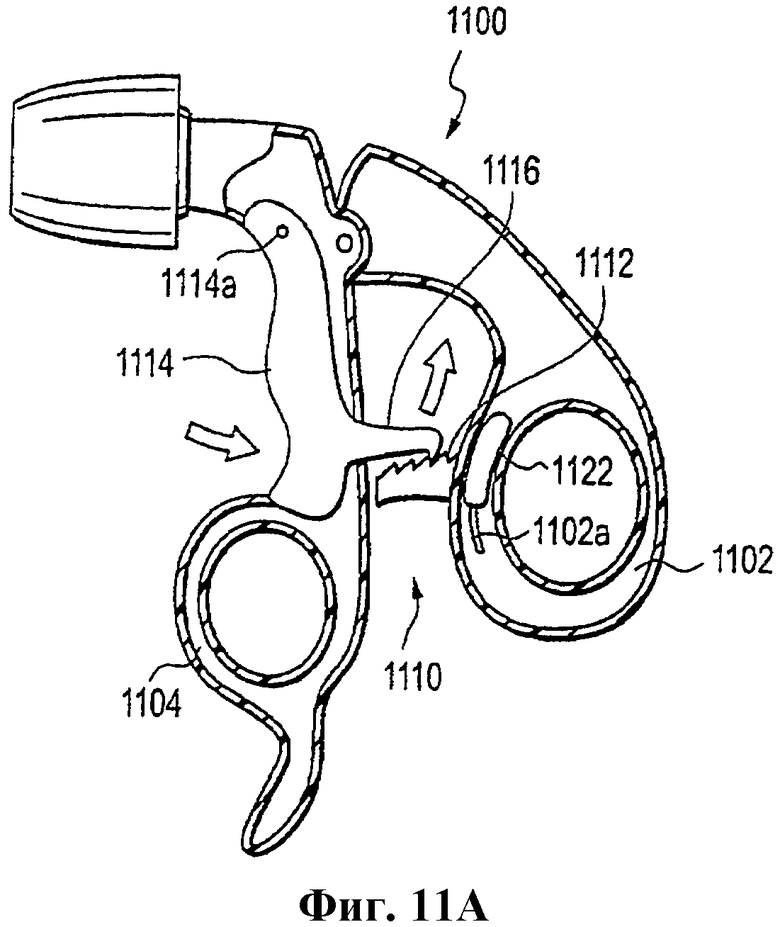
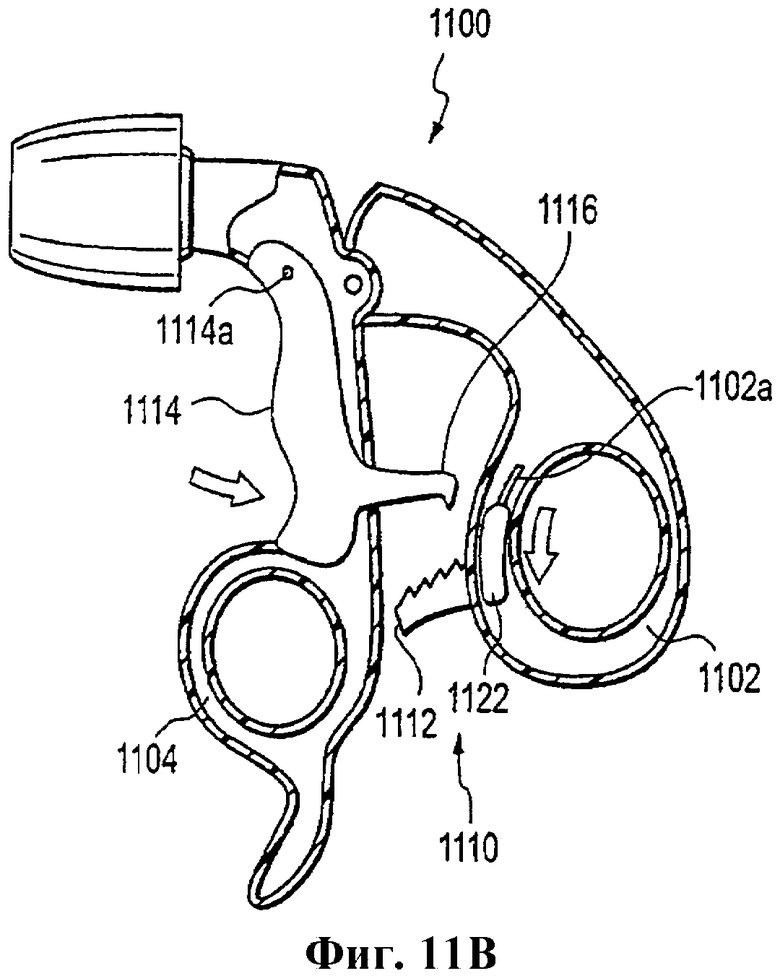
[0027] Фиг.11А-11В изображают рукоятку, заключающую седьмой вариант храпового механизма;
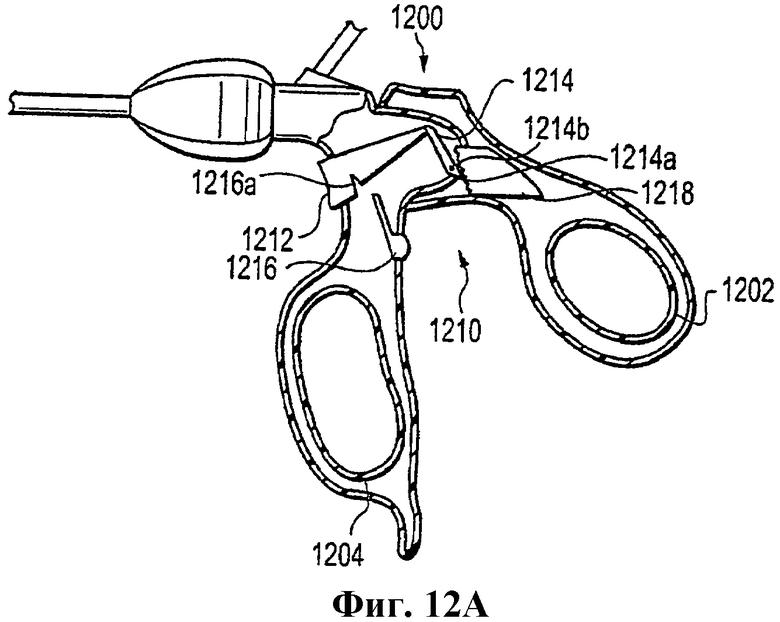
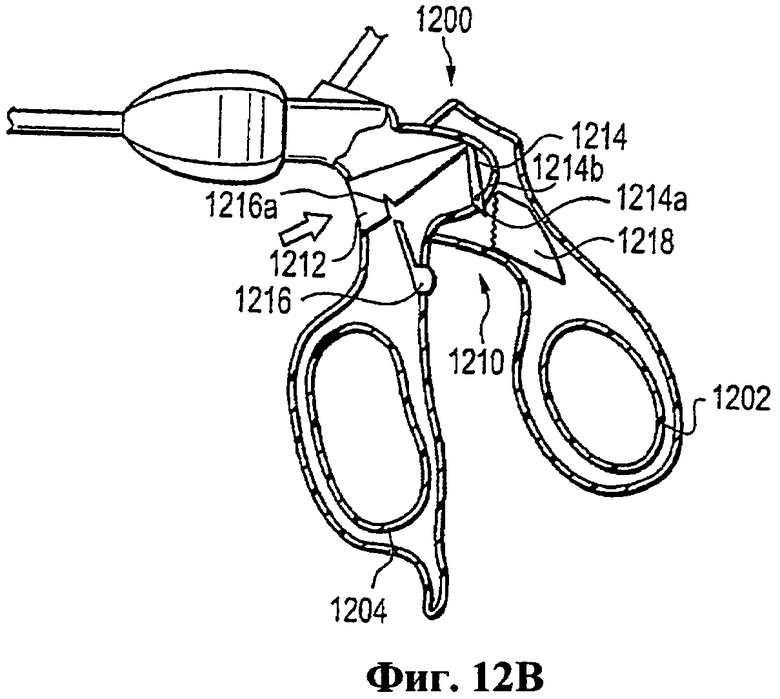
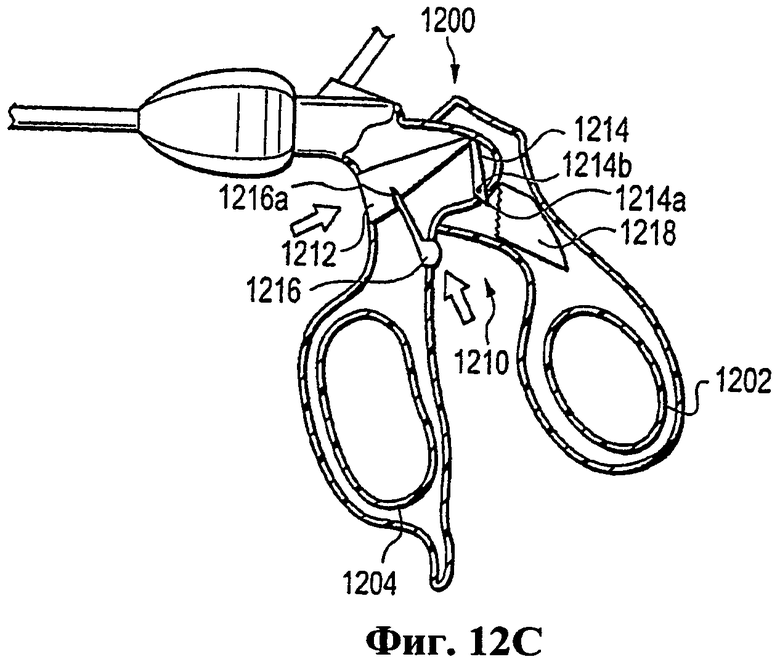
[0028] Фиг.12А-12С иллюстрируют рукоятку, заключающую восьмой вариант храпового механизма;
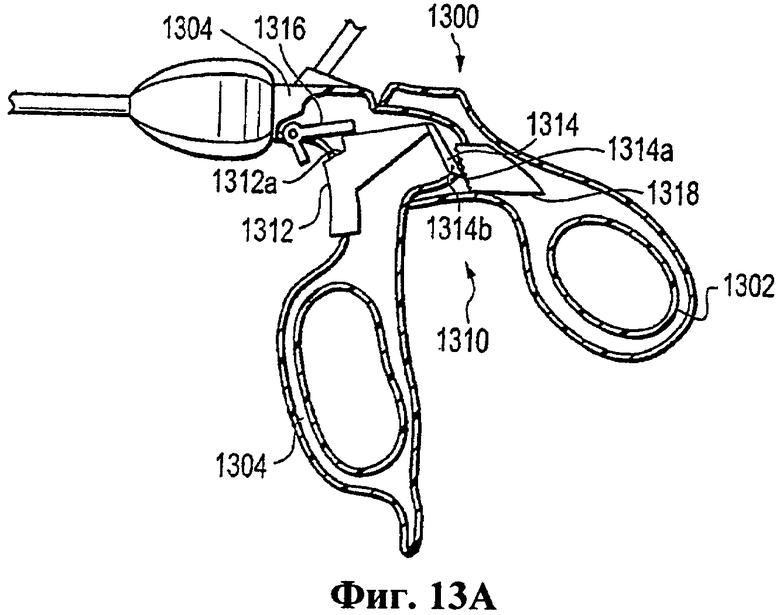
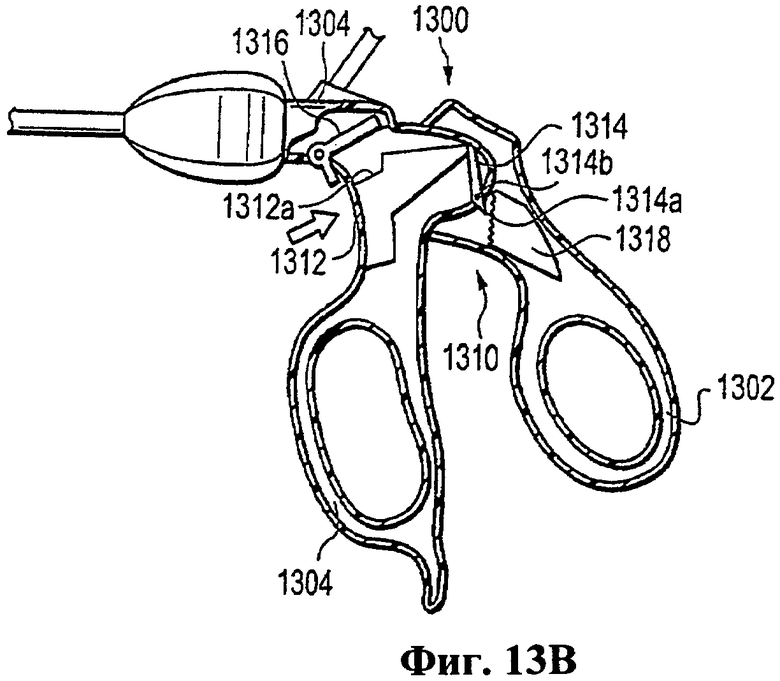
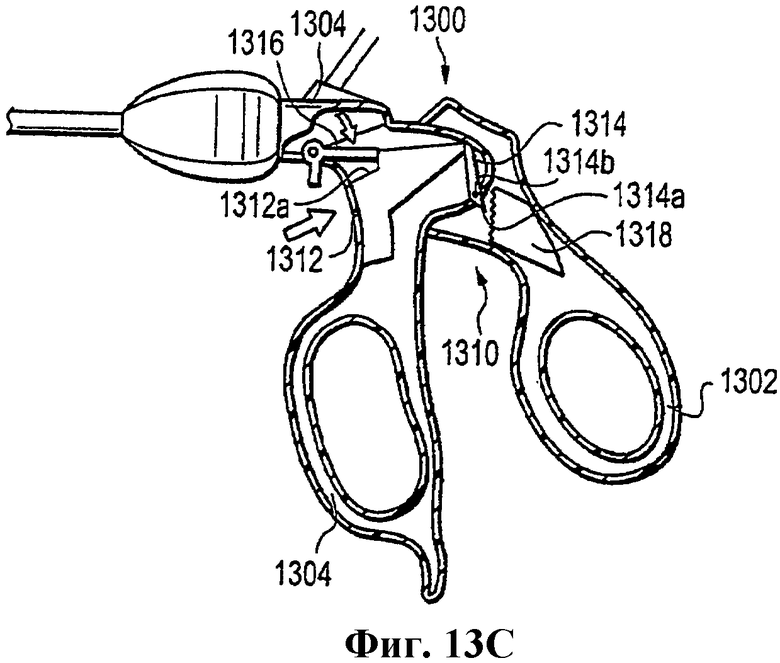
[0029] Фиг.13А-13С изображают рукоятку, заключающую девятый вариант храпового механизма;
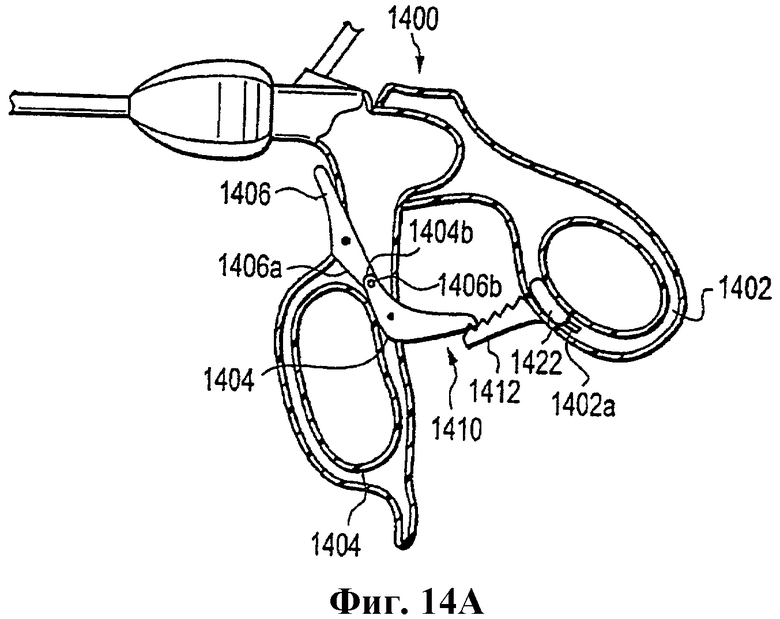
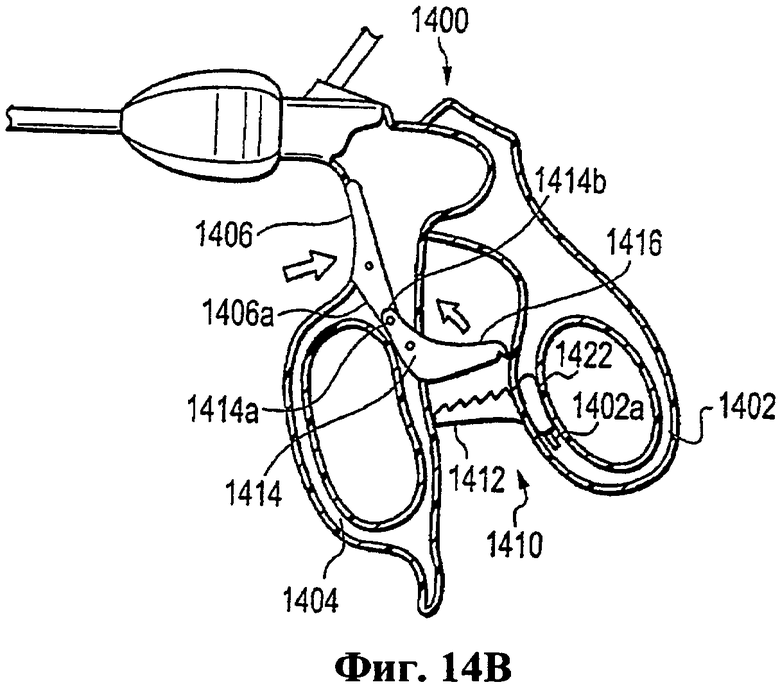
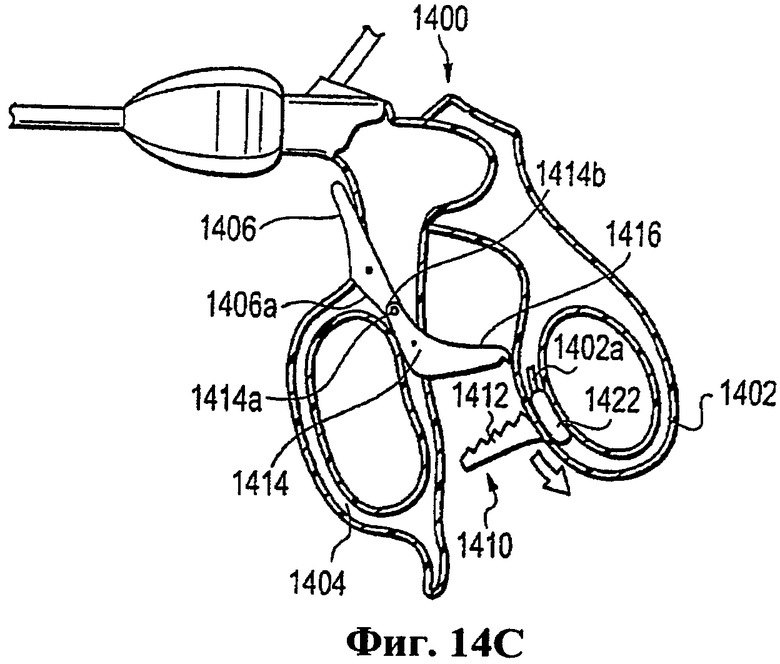
[0030] Фиг.14А-14С показывают рукоятку, заключающую десятый вариант храпового механизма;
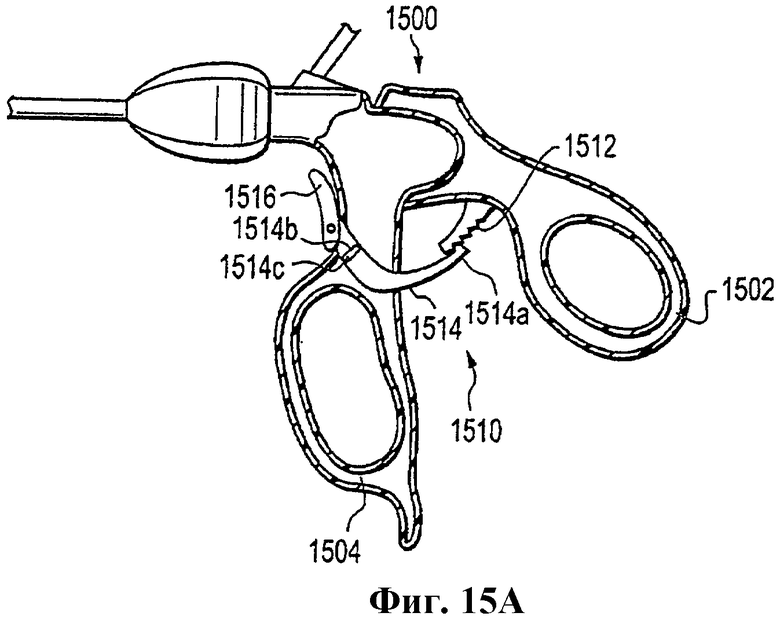
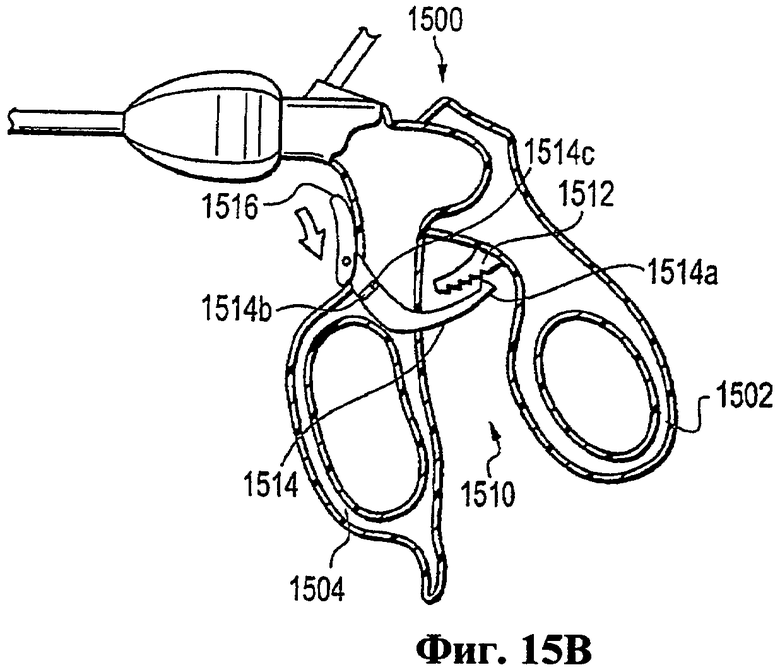
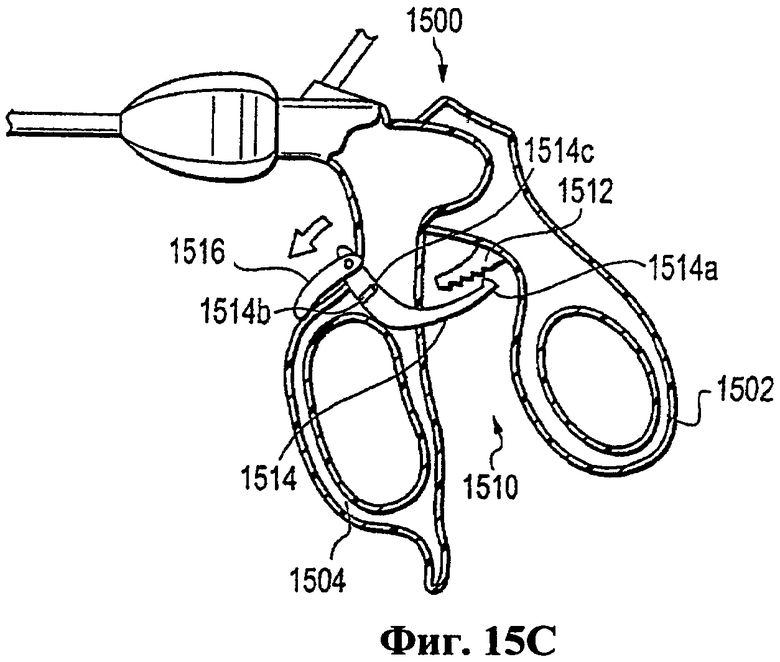
[0031] Фиг.15А-15С изображают рукоятку, заключающую одиннадцатый вариант храпового механизма;
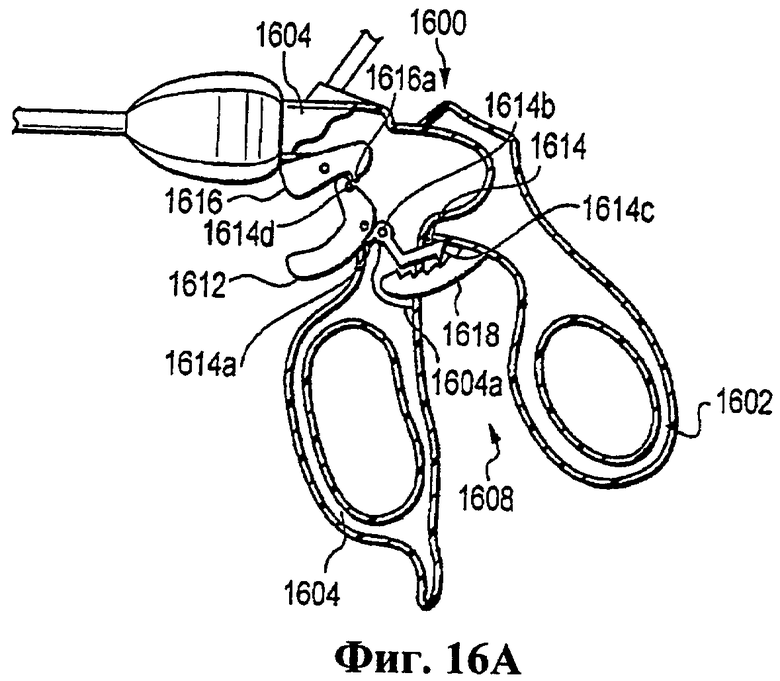
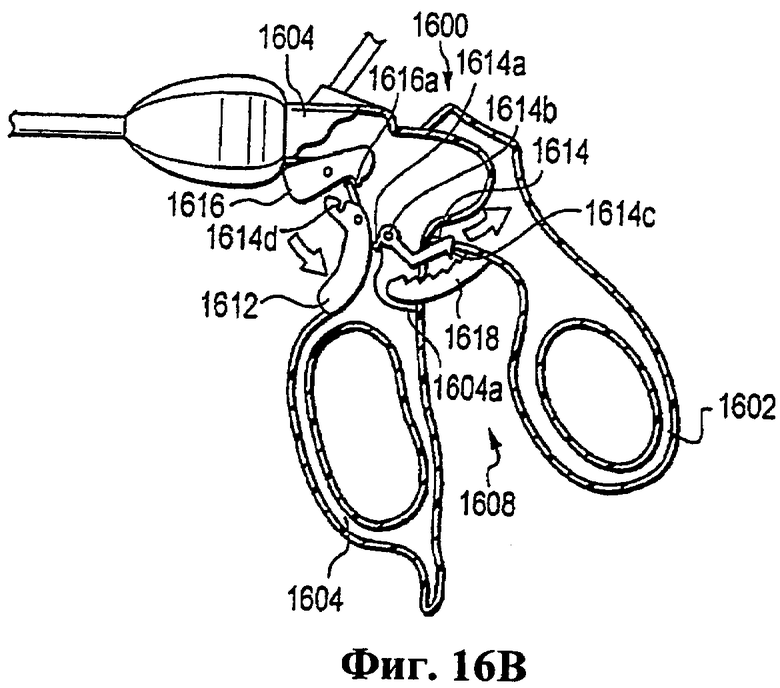
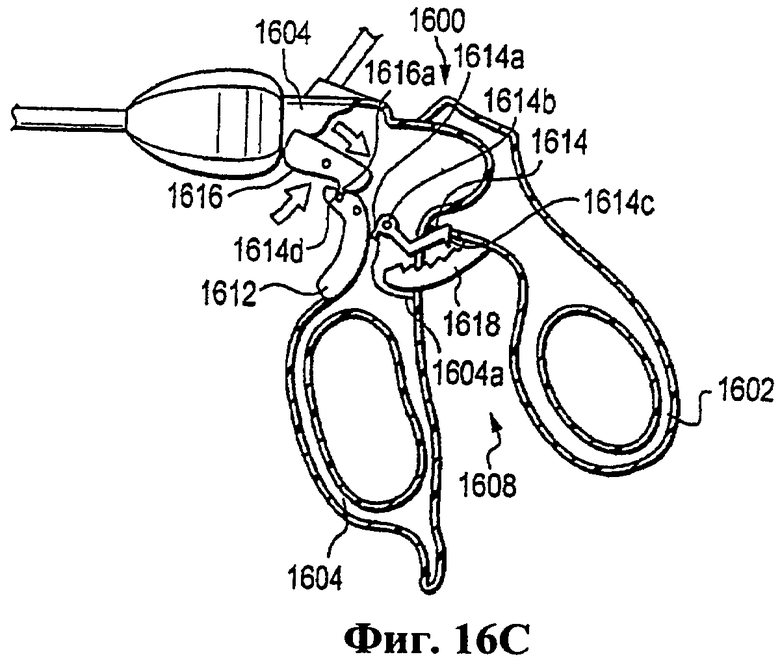
[0032] Фиг.16А-16С показывают рукоятку, заключающую двенадцатый вариант храпового механизма; и
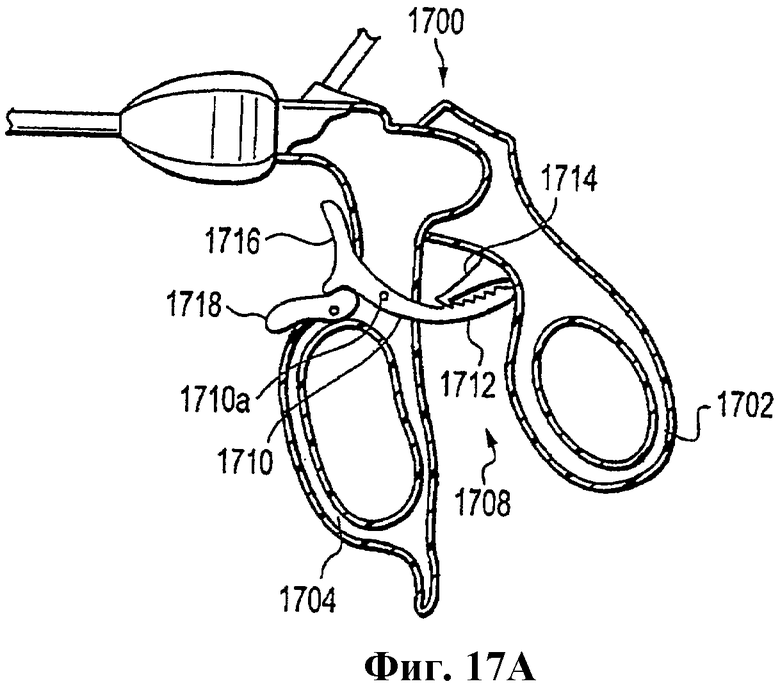
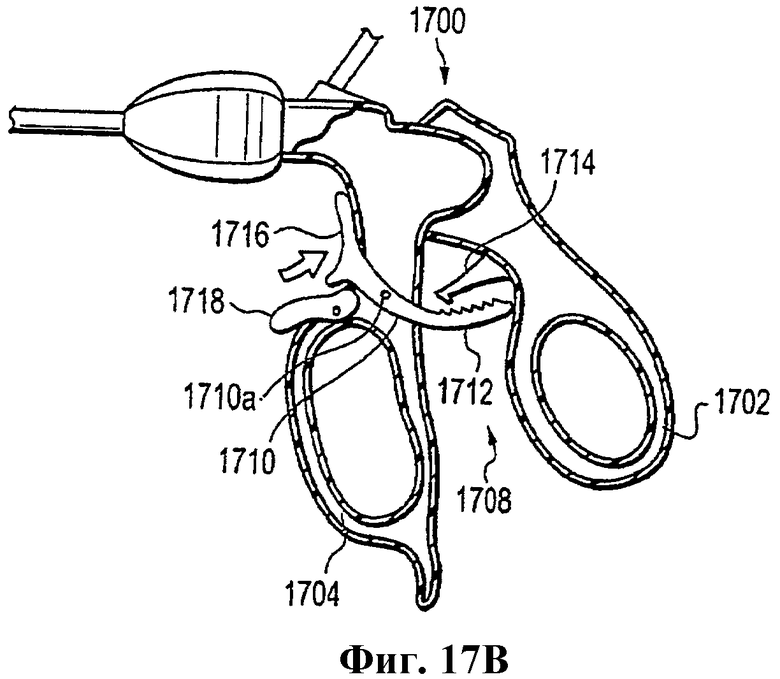
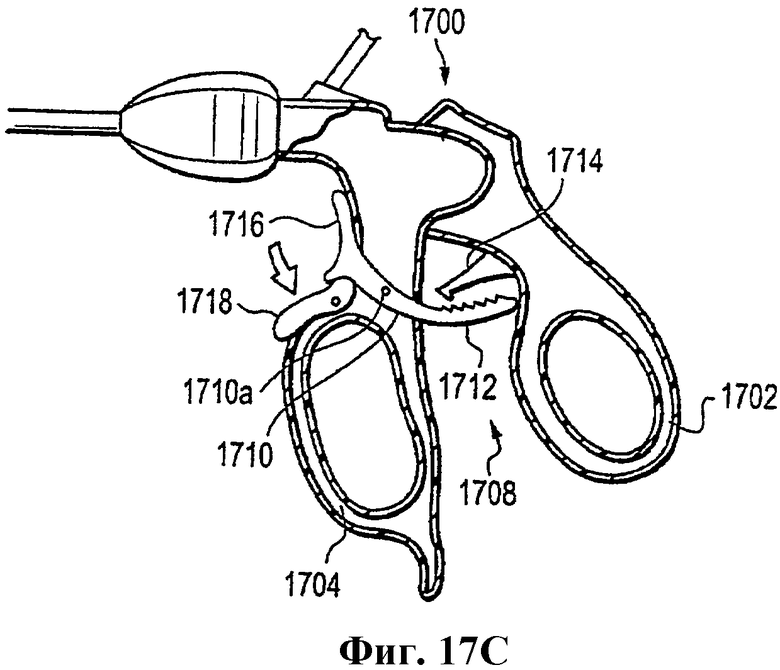
[0033] Фиг.17А-17С иллюстрируют рукоятку, заключающую тринадцатый вариант храпового механизма.
ДЕТАЛЬНОЕ ОПИСАНИЕ
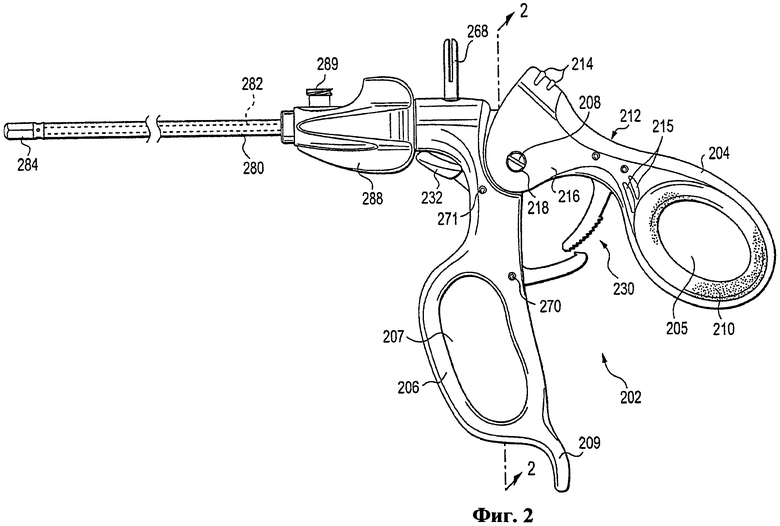
[0034] Первый вариант рукоятки 202 для лапароскопического устройства 200 показан со ссылками на фиг.2-2Е. Рукоятка 202 включает кольцевой элемент для большого пальца 204, который с возможностью поворота на оси поворота 208 присоединен к кольцевому пальцевому элементу 206. Кольцевой элемент для большого пальца и кольцевой элемент для пальцев 204, 206 предпочтительно изготовлены из полимерного материала, но могут альтернативно быть изготовлены из пластмассы или других материалов, известных в технике, пригодных для многократной стерилизации в паровом стерилизаторе. Вариант одноразового использования может быть изготовлен из материалов, известных в технике, но не обязательно выполнен для многократных стерилизаций. Удлиненный трубчатый вал 280 проходит дистально от пальцевого кольцевого элемента 206. Стержень приведения в действие 282 проходит дистально от кольцевого элемента для большого пальца 204 через вал 280. На дистальном конце устройства 200 концевой исполнительный элемент 284 оперативно связан и с валом 280, и со стержнем приведения в действие 282.
[0035] В показанном предпочтительном варианте храповой механизм 230, воплощенный как храповой механизм с единственной кнопкой освобождения/отмены, установлен в рукоятке 202 и выполнен для селективного закрепления кольцевого элемента для большого пальца 204 под выбранным пользователем углом к пальцевому кольцевому элементу 206. Альтернативные варианты могут не включать храповой механизм; но в предпочтительном аспекте этих альтернативных вариантов пространство, занятое храповым механизмом внутри рукоятки 202, предпочтительно заполнено металлической вставкой или другим адекватным материалом, чтобы поддержать баланс и осязательные свойства, связанные с вариантами, включающими храповой механизм.
[0036] В варианте, показанном на фиг.2-2Е, отверстие 205 кольцевого элемента для большого пальца 204 включает дополнительную мягкую кольцевую вставку 210. Подобную вставку произвольно можно обеспечить в кольцевом пальцевом элементе 206 вместе с или без кольцевой вставки для большого пальца. Мягкая кольцевая вставка 210 предпочтительно изготовлена из гибкого, нелатексного материала и может обеспечивать различные преимущества, включая, например: увеличенную фрикционную поверхность для лучшего захвата; более мягкую поверхность контакта для обеспечения эргономического комфорта, особенно в условиях длительного использования; и улучшенную опору/безопасность для пользователя с маленькими руками.
[0037] Как показано на фиг.2F и 2G, проксимальная поверхность 212 кольцевого элемента для большого пальца 204 предпочтительно изогнута внутрь/дистально выше отверстия для большого пальца 205 таким образом, что позволяет пользователю удобно управлять кольцевым элементом для большого пальца 204 "ладонным захватом", а не традиционным или "прицельным захватом" (не показано), где большой палец выступает, по крайней мере, частично из отверстия для большого пальца 205. В предпочтительном варианте текстурированная поверхность (например, борозды или выступы) на верхней проксимальной поверхности и/или на промежуточной боковой поверхности элемента для большого пальца обеспечивает как улучшенный фрикционный контакт, так и осязательный стимул для использования в "положении ладони с поднятым большим пальцем" (см., например, выступы 214 проксимальной поверхности на фиг.2F) и в "положении ладони с опущенным большим пальцем" (см., например, промежуточные боковые выступы 215 на фиг.2G). Предпочтительные варианты рукоятки 202 также могут включать другие эргономические конструктивные особенности. Например, кольцевое пальцевое отверстие 207 может иметь размеры для размещения двух средних пальцев рук пользователя, в то время как указательный палец пользователя может использоваться для приведения в действие храпового механизма над пальцевым кольцом 206, а мизинец пользователя может соприкасаться с упором 209. В предпочтительных вариантах поверхности кольцевого пальцевого отверстия 207 и кольцевого отверстия для большого пальца 205 имеют контур для обеспечения комфорта в течение использования любой из рук пользователя, и также для облегчения удаления рук пользователя из захвата рукоятки 202. Как другой пример, рукоятка 202 предпочтительно ориентирована под углом относительно вала 280, который обеспечен для простоты использования любой рукой пользователя, а также в положении захвата "вверх ногами".
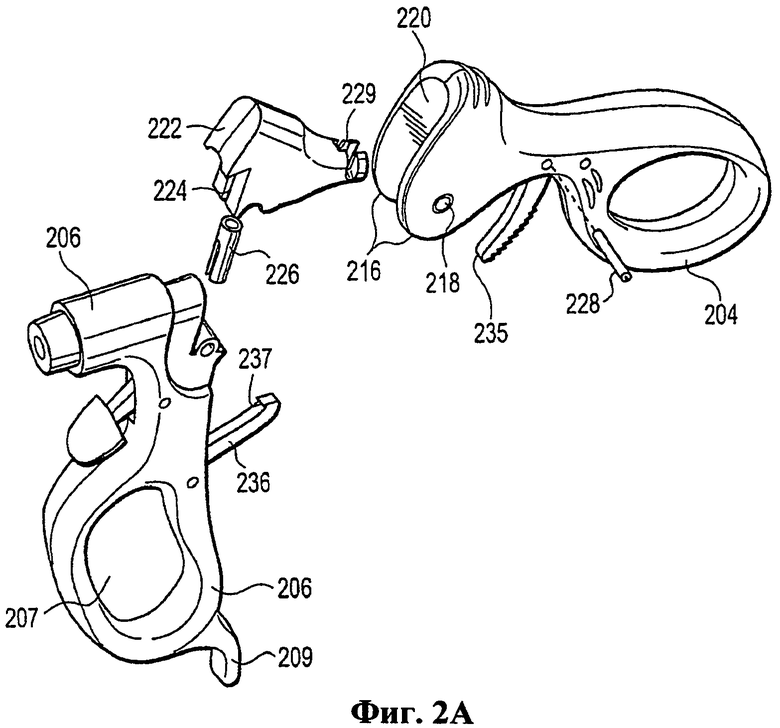
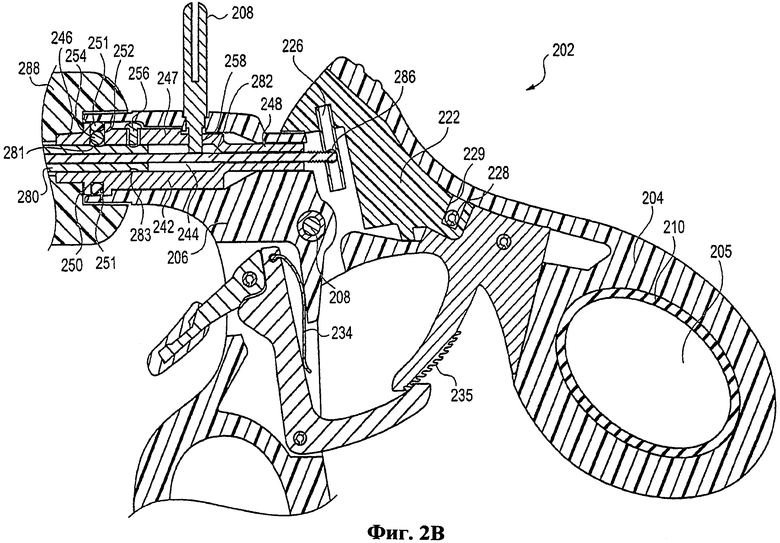
[0038] Фиг.2А показывает частично разобранный вид рукоятки 202, а фиг.2В показывает поперечное сечение рукоятки 202. Передняя верхняя область кольцевого элемента 204 для большого пальца выполнена так, чтобы взаимодействовать с кольцевым элементом для пальцев 206. Специфично, передняя верхняя область включает два дистально выступающих рычага 216 с осевым отверстием 218 через каждый рычаг для взаимодействия с осью поворота 208 на обеих сторонах верхней тыльной области пальцевого элемента 206 рукоятки. Тыльная верхняя область кольцевого элемента 204 для большого пальца включает приемную камеру 220, выполненную так, чтобы вместить фиксатор стержня приведения в действие 222. Когда он собран с кольцевым элементом для большого пальца 204, фиксатор стержня приведения в действие 222 предпочтительно удерживается на месте осью фиксатора 228, взаимодействующего с повышающейся бороздкой 229 (см. фиг.2А). Фиксатор стержня приведения в действие 222 предпочтительно - литая деталь, включающая шпоночную бороздку 224, имеющую размеры для приема и удержания шарика 286 (или конструкции другой формы для удержания стержня) на проксимальном конце стержня приведения в действие 282. Наиболее предпочтительно, чтобы бороздка 224 включала полуцилиндрическую металлическую вставку 226, которая поддерживает контакт с шариком 286. Открытая сторона бороздки 224 и открытая сторона металлической вставки 226 выровнены, чтобы формировать удерживающий канал. Металлическая вставка 226 обеспечивает надежное взаимодействие между шариком 286 стержня приведения в действие 282 и кольцевым элементом 204 для большого пальца, используемым для приведения в действие стержня при осевом перемещении. Конструкция, описанная для фиксатора 222, предусматривает изоляцию пользователя от электрического тока, текущего через стержень приведения в действие 282. Кроме того, описанная конструкция обеспечивает простоту изготовления, поскольку компоненты кольцевого элемента 204 для большого пальца могут быть собраны вместе до соединения с кольцевым элементом для пальцев 206. В альтернативном варианте фиксатор стержня приведения в действие может быть выполнен как отдельный металлический компонент с фиксирующей бороздкой для захвата проксимального шарика стержня приведения в действие. В предпочтительных вариантах и как показано, все компоненты рукоятки выполнены и имеют такие размеры, что, как только электрод соединяется с электрохирургическим узлом питания, все электропроводные компоненты изолируются от тех, с которыми соприкасается пользователь.
[0039] В показанном на фиг.2-2Е варианте кольцевой элемент для пальцев 206 включает удлиненное пальцевое отверстие 207 (например, приспособленное для того, чтобы вставить больше чем один палец) с упором 209, проходящим от него вниз. Пальцевое отверстие 207 и упор 209 предпочтительно ориентированы под углом, который обеспечивает комфорт и эргономическое преимущество для пользователя, независимо от того, используется ли кольцевой элемент для большого пальца 204 в применении "ладонного захвата" или в "прицельном/большим пальцем захвате" (см. фиг.2F-2G). Верхняя область пальцевого кольцевого элемента 206 включает канал 240, проходящий вдоль его проксимально-дистальной оси. В канале 240 расположен вкладыш 242.
[0040] Вкладыш 242 вообще является цилиндрическим и имеет полость 244, проходящую через его центральную продольную ось, через которую проходит проксимальная часть стержня приведения в действие 282. Вкладыш 242 имеет дистальную часть 246 с немного меньшим внешним диаметром, промежуточную корпусную часть 247 и проксимальную часть 248 со значительно меньшим внешним диаметром. Проксимальная область 281 вала устройства 280 с продольно расположенными бороздками выступает с возможностью поворота в дистальную часть полости 244. Около дистального конца промежуточной корпусной части 247 бороздка 250 опоясывает диаметр вкладыша 242. Стопорное отверстие для удержания шарика 252 простирается между бороздой 250 и полостью вкладыша 244. О-образное кольцо 251 в бороздке 250 удерживает стопор шарика 254 в отверстии 252 и смещает его против продольных бороздок (не показано) в проксимальной области 281 вала 280. Этот стопор обеспечивает указанное вращение вала 280. Специфично, вал 280 может поворачиваться вокруг его продольной оси на дискретные шаги, при этом каждый шаг поворота обеспечивает взаимодействие стопора шарика 254 с продольной бороздкой. Около середины промежуточной корпусной части 247 вкладыша через стенку вкладыша 242 проходит установочный винт 256. Установочный винт 256 взаимодействует с круговой стопорной бороздкой 283, смежной с проксимальным концом вала 280 таким образом, что позволяет валу поворачиваться вокруг его продольной оси относительно вкладыша 242, но аксиально сохраняет вал внутри вкладыша и, следовательно, в рукоятке 202. Около проксимального конца промежуточной корпусной части 247 верхняя поверхность вкладыша 242 немного сглажена, а электродное отверстие 258 открыто в полость 244. Электрод 260, выполненный для связи с электрохирургическим источником питания, проходит через отверстие 258 и соединяется со стержнем приведения в действие 282, таким образом, обеспечивая прохождение тока на стержень, но все еще позволяя ему вращаться.
[0041] Проксимальная корпусная часть 248 вкладыша 242 проходит вблизи проксимальной концевой поверхности кольцевого пальцевого элемента 206 и помогает удерживать вкладыш 242 в канале 240. В дополнение к обеспечению конструкционных компонентов, описанных выше, вкладыш 242 предусмотрен для эффективной сборки устройства 200 за счет обеспечения легкости сборки компонентов в кольцевой элемент 206 для пальцев. Вкладыш 242 предпочтительно выполнен из металлического или пластмассового материала и в предпочтительном варианте обеспечивает электрическую изоляцию вокруг вала 280.
[0042] Указанная поворотная головка 288 с возможностью поворота перекрывает дистальную внешнюю часть верхней области кольцевого элемента для пальцев 206 и присоединена к внешней части вала 280. Поворотная головка 288 предпочтительно включает порт смыва 289, открытый во внутреннюю область вала 280 (см., например, патент США №5489290, который включен здесь ссылкой для иллюстрации типичного порта смыва/механизма поворотной головки). Поворотная головка 288 обеспечивает средства для поворота вала 280 вокруг его продольной оси относительно рукоятки 202. Головка 288 предпочтительно расположена в эргономически-ориентируемом положении так, что пользователь может поворачивать ее указательным пальцем, не удаляя или изменяя ее захват на рукоятке 202, а ее внешняя поверхность предпочтительно включает множество широких бороздок для обеспечения упора указательного пальца пользователя. Как описано выше, вращение вала путем поворота головки 288 указано (путем взаимодействия шарового стопора 254 с продольными бороздками на валу 280) для обеспечения точного, контролируемого поворота вала 280.
[0043] Рукоятка 202 включает храповой механизм 230, описанный со ссылкой на фиг.2С-2Е, конструкция которого обеспечивает преимущества для сборки устройства 200 и легкости использования. Храповой механизм 230 предпочтительно включает конструкцию из четырех частей. Храповой элемент 231 фиксирован в кольцевом элементе большого пальца 204. Кнопка освобождения/отмены, показанная здесь как кулачковый элемент 232, L-образный элемент защелки 238 и листовая пружина 234 расположены в кольцевом элементе 206 для пальцев. Храповой элемент 231 включает искривленный, зубчатый выступ 235, который проходит вообще дистально из кольцевого элемента для большого пальца 204 к кольцевому элементу для пальцев 206. Элемент защелки 238 включает искривленный защелкивающий выступ 236, который проходит проксимально из кольцевого элемента для пальцев 206 к кольцевому элементу для большого пальца 204, и который защелкивающий зуб 237 на его верхней поверхности. Элемент защелки 238 также включает первую взаимодействующую с кулачком поверхность 238а на дистальной стороне около верхнего конца ее вертикальной лапки защелки 239 и вторую взаимодействующую с кулачком поверхность 238b, выступающую дистально ниже первой взаимодействующей с кулачком поверхности 238а. Верхний конец листовой пружины 234 закреплен около верхнего конца элемента защелки 238, и ее наклоненная наружу поверхность контактирует с внутренней поверхностью кольцевого элемента 206 для пальцев, таким образом, смещая вертикальную лапку защелки 239 в дистальном направлении. Элемент защелки 238 - с возможностью поворота соединен внутри кольцевого элемента для пальцев 20 осью поворота защелки 270, которая расположена проксимально от соединения искривленного выступа защелки 236 с вертикальным элементом 239. Кулачковый элемент 232 с возможностью поворота соединен с кольцевым элементом для пальцев 206 осью поворота кулачка 271. В альтернативном варианте дистальный выступ кольцевого элемента для большого пальца может включать один или более защелкивающих зубьев, а проксимальный выступ кольцевого элемента для пальцев может включать защелкиваемую поверхность. Эта обратимость добавочной/взаимодействующей поверхностей также применима к другим вариантам настоящего изобретения.
[0044] Храповой механизм 230 может приводиться в действие в одно из трех выбранных пользователем состояний (взаимодействующее, освобожденное и отмены), которые описаны, соответственно, со ссылками на фиг.2С, 2D и 2Е.
[0045] Как показано на фиг.2С, когда храповой механизм 230 находится в положении защелкивания, защелкивающий зуб 237 элемента защелки 238 взаимодействует с зубом искривленного, зубчатого выступа 235. Это взаимодействие предотвращает кольцо для большого пальца 204 от проксимального перемещения относительно (то есть дальше от) кольца для пальцев 206, но позволяет его дистальное перемещение относительно (то есть ближе к) кольца для пальцев. Во взаимодействующем состоянии положение элемента защелки 238 поддерживается смещением листовой пружины 234 против внутренней поверхности кольцевого элемента 206 для пальцев. Это смещение прикладывает дистальную/нисходящую силу против вертикальной лапки защелки 239, таким образом, поворачивая элемент защелки 238 вокруг центра поворота защелки 270 так, что защелкивающий зубчатый выступ 236 направляется дистально/вверх во взаимодействие с искривленным, зубчатым выступом 235 кольцевого элемента для большого пальца. В положении взаимодействия кулачковый элемент 232 находится в покое и не имеет значительного оказывающего силу контакта с элементом защелки 238.
[0046] Как показано на фиг.2D, когда храповой механизм 230 находится в освобожденном состоянии, защелкивающий зуб 237 элемента защелки 238 выведен из зацепления с зубом искривленного, зубчатого выступа 235. Это разъединение обеспечивает перемещение кольца 204 для большого пальца к или от кольца 206 для пальцев. Разъединение освобожденного состояния производится за счет удержания кулачкового элемента 232 в нисходящем положении. В освобожденном состоянии проксимальная часть кулачкового элемента 232 динамически удерживается против второй взаимодействующей с кулачком поверхности 238b элемента защелки 238. Этот контакт воздействует на вертикальную лапку защелки 239 проксимально, против смещения листовой пружины 234. Эта проксимальная сила поворачивает элемент защелки 238 вокруг оси поворота защелки 270 так, что защелкивающий, зубчатый выступ 236 поднимается рычагом дистально/вниз и из зацепления с искривленным, зубчатым выступом 235 кольцевого элемента для большого пальца. Чтобы сопротивляться смещению листовой пружины 234, кулачковый элемент 232 должен удерживаться в положении для поддержания освобожденного состояния.
[0047] Как показано на фиг.2Е, когда храповой механизм 230 находится в состоянии отмены, защелкивающий зуб 237 элемента защелки 238 расцеплен с зубом искривленного, зубчатого выступа 235. Это разъединение позволяет кольцу 204 для большого пальца свободно перемещаться к, или от кольца 206 для пальцев. Разъединение в освобожденном состоянии осуществляется перемещением кулачкового элемента 232 в восходящее положение. В состоянии отмены проксимальная часть кулачкового элемента 232 защелкнута против первой взаимодействующей с кулачком поверхности 238а элемента защелки 238. Этот контакт оказывает воздействие на вертикальную лапку защелки 239 проксимально, против смещения листовой пружины 234. Проксимальная сила поворачивает элемент защелки 238 вокруг центра поворота защелки 270 так, что защелкивающий зубчатый выступ 236 направляется дистально/вниз и выходит из зацепления с искривленным, зубчатым выступом 235 кольцевого элемента для большого пальца. Кулачковый элемент 232 поворачивается мимо точки изгиба так, что угол контакта кулачкового элемента 232 с первой взаимодействующей с кулачком поверхностью 238а защелкивает кулачковый элемент 232 в восходящем положении для поддержания состоянии отмены. В альтернативном варианте (не показан) между кольцевым элементом 204 для большого пальца и кольцевым элементом 206 для пальцев может быть обеспечена листовая пружина, чтобы смещать их отдельно (в "открытом" положении).
[0048] Первый вариант поворачиваемой большим пальцем рукоятки 300 показан на фиг.3А-3В. Рукоятка 300 включает кольцевой элемент для большого пальца 302, и кольцевой элемент 304 для пальцев. Кольцевой элемент для большого пальца 302 включает компонент поворотного рычага 306, который с возможностью поворота связан с кольцевым элементом для пальцев 304 так, что кольцевой элемент для большого пальца может поворачиваться в той же плоскости, что и кольцевой элемент 304 для пальцев и тем же самым способом, как и обычная конструкция рукоятки. Кольцевой элемент 302 для большого пальца включает компонент отверстия для большого пальца 308, который с возможностью поворота связан с компонентом поворотного рычага 306 так, что компонент отверстия для большого пальца 308 может поворачиваться относительно компонента поворотного рычага 306 вокруг продольной оси (линия 3-3) компонента поворотного рычага 306 (то есть проксимальная часть компонента отверстия для большого пальца 308 может выворачиваться из основной плоскости, определенной заданной ориентацией кольцевого элемента для большого пальца 302 и кольцевого элемента для пальцев 304 на фиг.3А). Эта особенность конструкции позволяет пользователю поддерживать естественную ориентацию запястье - большой палец, обеспечивая больший диапазон движения рукоятки без расцепления большого пальца пользователя от рукоятки 300.
[0049] Второй вариант поворачиваемой большим пальцем рукоятки 400 показан на фиг.4А-4В. Рукоятка 400 включает кольцевой элемент для большого пальца 402 и кольцевой элемент для пальцев 404. Кольцевой элемент для большого пальца 402 включает компонент поворотного рычага 406, который с возможностью поворота связан с кольцевым элементом для пальцев 404 так, что кольцевой элемент для большого пальца может поворачиваться в той же самой плоскости, что и кольцевой элемент для пальцев 404, и тем же самым образом, что обычная конструкция рукоятки. Кольцевой элемент для большого пальца 402 включает компонент с отверстием для большого пальца 408, который с возможностью поворота связан с центральным рычажным компонентом 406 так, что компонент с отверстием для большого пальца 408 может поворачиваться от продольной оси компонента поворотного рычага 406 (то есть весь компонент с отверстием для большого пальца 408 может поворачиваться вдоль поперечной оси 4-4 и от основной плоскости, определенной подразумеваемой ориентацией кольцевого элемента для большого пальца 402 и кольцевого элемента для пальцев 404 на фиг.4А). Эта особенность конструкции позволяет пользователю поддерживать естественную ориентацию большой палец - запястье, обеспечивая больший диапазон движения рукоятки без расцепления большого пальца пользователя от рукоятки 400.
[0050] Первый линейный/традиционный изменяемый вариант рукоятки 500 для лапароскопического устройства 501 изображен на фиг.5-5А. Рукоятка 500 включает кольцевой элемент для большого пальца 502 и кольцевой элемент для пальцев 504. Кольцевой элемент для большого пальца 502 с возможностью поворота связан с кольцевым элементом для пальцев 504 так, что кольцевой элемент для большого пальца может поворачиваться в той же самой плоскости, что и кольцевой элемент для пальцев 504 и тем же самым способом, что и рукоятка обычной конструкции. Поворотный механизм 508 расположен на соединении рукоятки 500 с валом 510 и другими более удаленными компонентами устройства 501. Этот поворотный механизм 508 предусматривает возможность выбора пользователем конфигурации рукоятки 502 в "традиционной" (или "прицельной") ориентации, в которой продольная ось кольцевого элемента для пальцев 504 почти перпендикулярна относительно вала 510 (см. фиг.5). Или пользователь может повернуть рукоятку 500 вверх в "линейную" ориентацию, в которой продольная ось кольцевого элемента для пальцев 504 почти коаксиальна продольной оси вала 510 (см. фиг.5А). Специалисты отрасли оценят, что пользователь может выбрать ориентацию рукоятки 500 под большим или меньшим углом, чем показано.
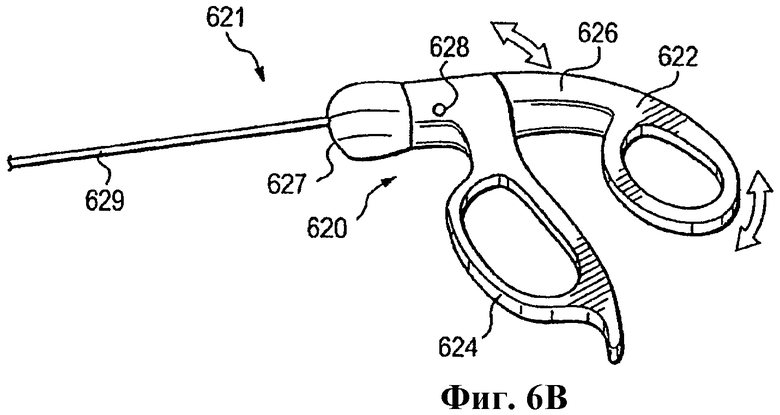
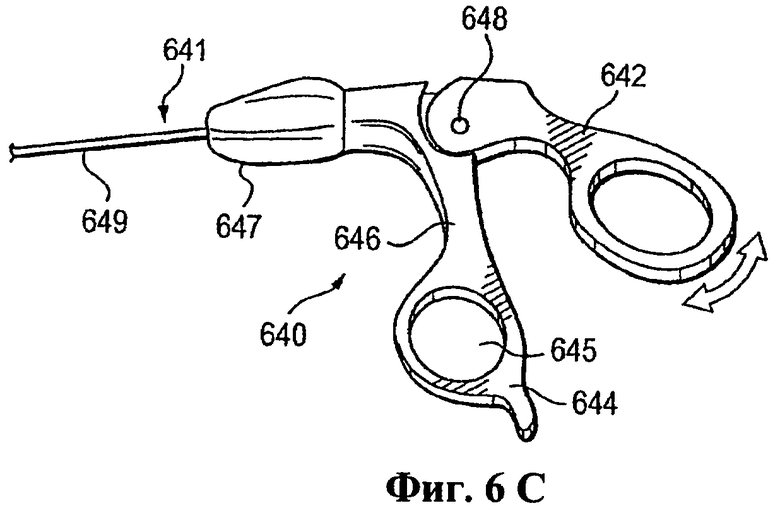
[0051] Фиг.6А-6С иллюстрируют альтернативные варианты рукоятки, в которых форма и относительное положение кольцевых элементов и поворотной головки различны.
[0052] Первый альтернативный вариант геометрии рукоятки 600 для лапароскопического устройства 601 изображен на фиг.6А. Рукоятка 600 включает кольцевой элемент для большого пальца 602 и кольцевой элемент для пальцев 604. Кольцевой элемент для большого пальца 602 включает компонент поворотного рычага 606, который с возможностью поворота связан с кольцевым элементом для пальцев 604 осью поворота 608 так, что кольцевой элемент для большого пальца может поворачиваться в той же самой плоскости, что и кольцевой элемент для пальцев 604. Ось поворота 608 расположена низко и проксимально на верхней области кольцевого элемента для пальцев 604. Часть компонента поворотного рычага кольца для большого пальца 606, которая находится выше оси поворота 608, входит в открытую область в кольцевом элементе для пальцев 604, когда части рукоятки открыты/отделены. Поворотная головка 607 для поворота вала 609 устройства 601 вокруг его продольной оси расположена в передней верхней области кольцевого элемента для пальцев 604.
[0053] Второй альтернативный вариант геометрии рукоятки 620 для лапароскопического устройства 621 изображен на фиг.6В. Рукоятка 620 включает кольцевой элемент для большого пальца 622 и кольцевой элемент для пальцев 624. Кольцевой элемент для большого пальца 622 включает элемент поворотного рычага 626, который с возможностью поворота связан с кольцевым элементом для пальцев 624 осью поворота 628 так, что кольцевой элемент для большого пальца может поворачиваться в той же самой плоскости, что и кольцевой элемент для пальцев 624. Ось поворота 628 расположена дистально на верхней области кольцевого элемента для пальцев 624. Часть компонента поворотного рычага 626 кольца для большого пальца, который находится выше оси поворота 628, поворачивается выше продольной оси вала 629 устройства, когда элементы рукоятки 622, 624 открыты/отделены. Поворотная головка 627 для поворота вала 629 устройства 621 вокруг его продольной оси расположена дистально по отношению к передней верхней области кольцевого элемента для пальцев 624.
[0054] Третий альтернативный вариант геометрии рукоятки 640 лапароскопического устройства 641 изображен на фиг.6А. Рукоятка 640 включает кольцевой элемент для большого пальца 642 и кольцевой элемент для пальцев 644. Кольцевой элемент для большого пальца 642 с возможностью поворота связан с кольцевым элементом для пальцев 644 осью поворота 648 так, что кольцевой элемент для большого пальца может поворачиваться в той же самой плоскости, что и кольцевой элемент для пальцев 644. Ось поворота 648 расположена по существу так же, как в варианте устройства фиг.2. Поворотная головка 647 для поворота вала 649 устройства 641 вокруг его продольной оси расположена в передней верхней области кольцевого элемента для пальцев 644. Кольцевой элемент для пальцев 644 включает отверстие для пальцев 645, сформированное для единственного пальца, и опору для пальца 646, сформированную, чтобы поддерживать один или более пальцев.
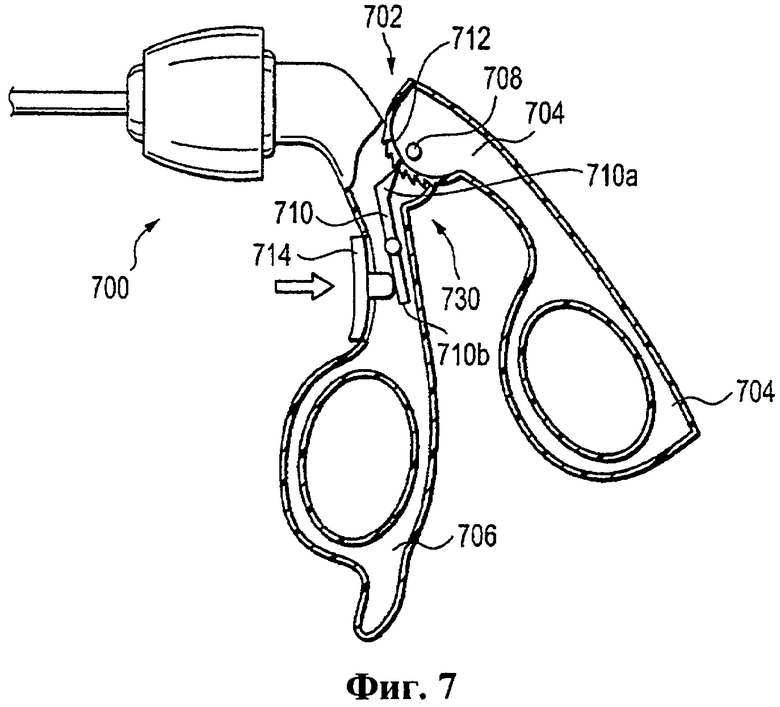
[0055] Первый альтернативный вариант приводимой в движение от храпового механизма рукоятки 702 для лапароскопического устройства 700 показан со ссылками на фиг.7-7С. Рукоятка 702 включает кольцевой элемент 704 для большого пальца, который с возможностью поворота присоединен на оси вращения 708 к кольцевому элементу для пальцев 706. Удлиненный трубчатый вал 780 проходит дистально от кольцевого элемента для пальцев 706.
[0056] В варианте, показанном на фиг.7-7С, показаны варианты храпового механизма как входящие в рукоятку 702 и выполненные для селективного прикрепления кольцевого элемента для большого пальца 704 под выбранным пользователем углом к кольцевому элементу для пальцев 706. Верхняя область кольцевого элемента 704 для большого пальца включает искривленную храповую поверхность 712, расположенную смежно и под осью поворота 708.
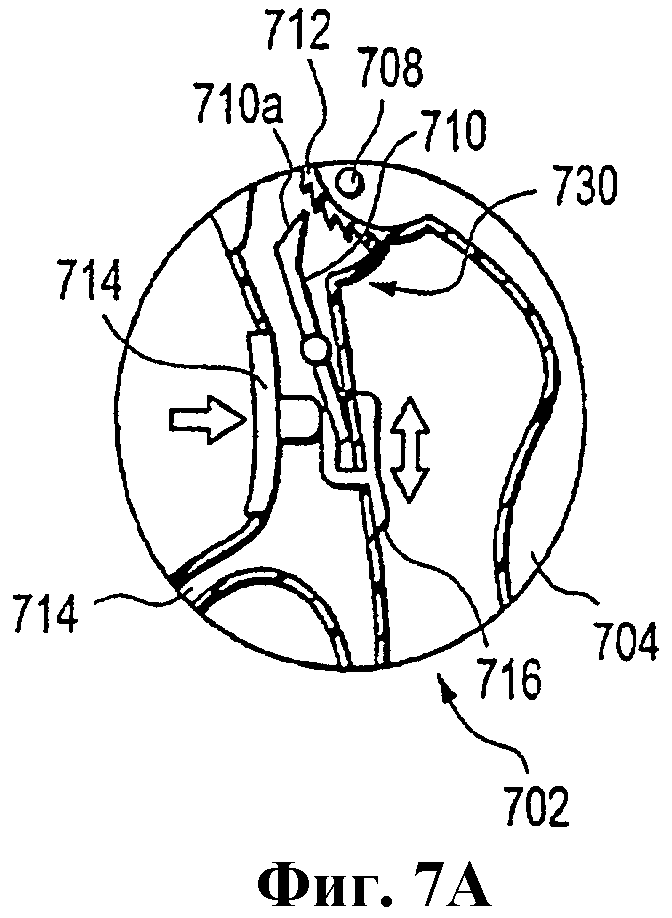
[0057] Фиг.7 изображает первый вариант храпового механизма 730. В дополнение к искривленной храповой поверхности 712 храповой механизм 730 включает кулачковый переключатель 714 и рычаг защелки 710. Рычаг защелки 710 включает верхнее плечо защелки 710а и нижнее плечо защелки 710b. Верхнее плечо защелки 710а включает зуб защелки 710с, формируемый, чтобы взаимодействовать с храповой поверхностью 712, а механизм 730 включает пружину (например, пружину кручения или листовую пружину, не показано), которая смещает рычаг защелки 710 в положение взаимодействия с храповой поверхностью 712, когда - как показано - кулачковый переключатель 714 находится в нейтральном положении (взаимодействующее с рукояткой состояние), позволяя храповому механизму 730 входить в зацепление и предотвратить открытие рукоятки 702. Кулачковый переключатель 714 может перемещаться вверх, оказывая силу против нижнего рычага защелки 710b, чтобы поднять рычагом защелку 710 из зацепления с храповой поверхностью 712 (освобожденное состояние рукоятки). Альтернативно, кулачковый переключатель 712 может быть выполнен таким образом, чтобы втягиваться проксимально в кольцевой элемент для пальцев 706.
[0058] Фиг.7А показывает детальный вид первого храпового механизма с фиг.7, с дополнением выключателя отмены 716. В показанном варианте выключатель отмены 716 может быть перемещен вверх для взаимодействия с нижним плечом защелки 710b, когда он (716) не взаимодействует с храповой поверхностью 712. Когда выключатель отмены 716 таким образом взаимодействует, рукоятка 702 может быть свободно открыта и закрыта.
[0059] Фиг.7В иллюстрирует детали второго варианта храпового механизма 740 в рукоятке 701, которая почти идентична рукоятке 702 на фиг.7, но имеет другое расположение кулачкового элемента. Второй вариант храпового механизма 740 включает кулачковый следящий упор 742. В состоянии зацепления храпового механизма (нейтральном), кулачковый следящий упор 742 имеет небольшой контакт или не контактирует с нижней частью 710b рычага защелки 710. Чтобы освободить рычаг защелки 710 от зацепления с храповой поверхностью 712, пользователь ослабляет кулачковый следящий упор 742, таким образом, перемещая вверх рычагом верхний рычаг защелки 710а от храповой поверхности 712. Чтобы отменить взаимодействие, пользователь ослабляет кулачковый следящий упор 742 проксимально для освобождения зацепления, затем запирает кулачковый следящий упор 742 на месте, перемещая его вниз в зацепление с выемкой 706а, которой снабжен кольцевой элемент для пальцев 706.
[0060] Фиг.7С представляет детальный вид третьего варианта храпового механизма 750 в рукоятке 703, которая почти идентична рукоятке 702 на фиг.7, но имеет другое расположение кулачкового элемента. Третий вариант храпового механизма 740 включает кулачковую кнопку 752 и запирающий упор 754 для кнопки. В зацепленном с храповым механизмом (нейтральном) состоянии кулачковая кнопка 752 имеет только минимальный контакт с нижней частью рычага защелки 710. Чтобы освободить рычаг защелки 710 от зацепления с храповой поверхностью 712, пользователь ослабляет кулачковую кнопку 752 дистально, таким образом, поднимая рычагом верхний рычаг защелки 710а от храповой поверхности 712 (освобожденное состояние). Чтобы отменить зацепление храпового механизма, пользователь ослабляет кулачковую кнопку 752 для освобождения зацепления, и затем запирает кулачковую кнопку 752 на месте, перемещая вниз запирающий упор 754 кулачковой кнопки по кулачковой кнопке 752 для удержания ее (752) на месте. Варианты на фиг.7-7С так же как и фиг.12А-13С иллюстрируют альтернативное местоположение зубчатой храповой поверхности, размещенной на кольцевом элементе для большого пальца. В этих вариантах компоненты храпового механизма вообще заключены в корпусе рукоятки или, по крайней мере, предпочтительно не выступают значительно наружу между элементами рукоятки. Специалист оценит, что эти варианты могут предоставить пользователю больше свободы для управления его рукой вокруг кольцевого элемента для пальцев и кольцевого элемента для большого пальца в различных ориентациях и/или захватах, чем варианты с выступами от/между элементами рукоятки.
[0061] Фиг.8А-8В иллюстрируют рукоятку 800, включающую четвертый вариант храпового механизма 810. Рукоятка включает кольцевой элемент для большого пальца, который 802 с возможностью поворота присоединен к кольцевому элементу для пальцев 804. Храповой механизм 810 включает искривленный зубчатый храповой рычаг 812, который дистально выступает от кольцевого элемента для большого пальца 802, рычаг защелки 814, который с возможностью поворота присоединен к кольцевому элементу для пальцев 804, и кулачковый рычаг 816, который с возможностью поворота связан с кольцевым элементом для пальцев 804. Зуб защелки 814а, смежный с проксимальным концом рычага защелки 814, предпочтительно смещен в зацепление с зубчатым храповым рычагом 812 (например, торсионной или листовой пружиной, не показана). Искривленный нижний кулачковый конец 816а кулачкового рычага 816 контактирует с угловым дистальным концом 814b рычага защелки 814. В нейтральном/зацепленном состоянии, показанном на фиг.8А, зуб защелки 814а зацеплен с зубчатым храповым рычагом 812, а рычаг защелки 814 ориентируется в общем случае перпендикулярно кольцевому элементу для пальцев 804. В состоянии отмены храпового механизма, изображенном на фиг.8В, рычаг защелки 814 ориентируется в общем случае параллельно кольцевому элементу для пальцев 804, а контакт искривленного нижнего кулачкового конца 816а кулачкового рычага 816 с угловым дистальным концом 814b рычага защелки 814 поднимает проксимальный конец зубатой защелки 814 из зацепления с зубчатым храповым рычагом 812. В состоянии отмены предпочтительно, чтобы поверхностный контакт между кулачковым рычагом 816 и рычагом защелки 814 был выполнен таким образом, чтобы сформировать фрикционный замок, достаточный для сопротивления смещению рычага защелки в зацепление с зубчатым храповым рычагом 812.
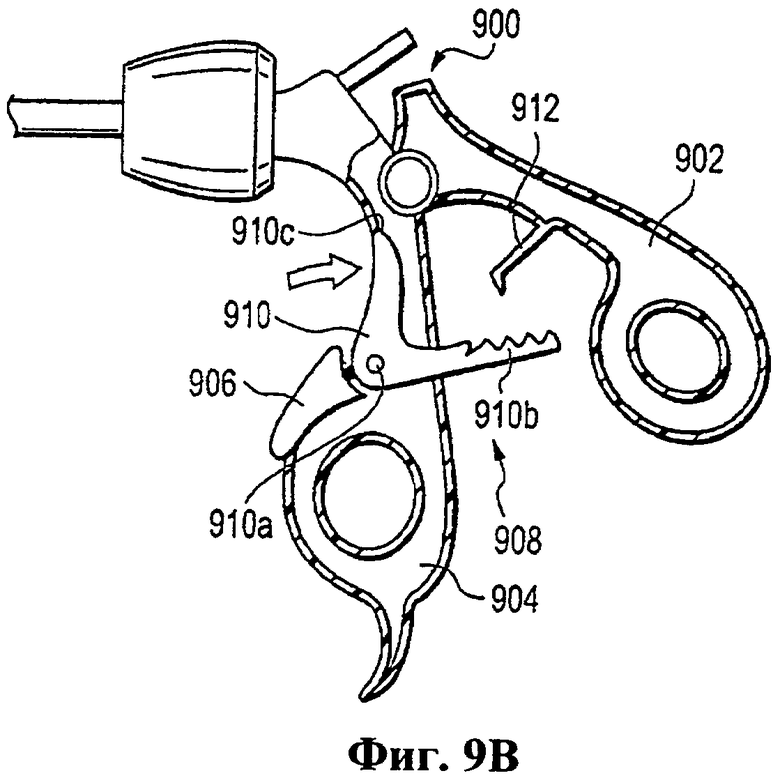
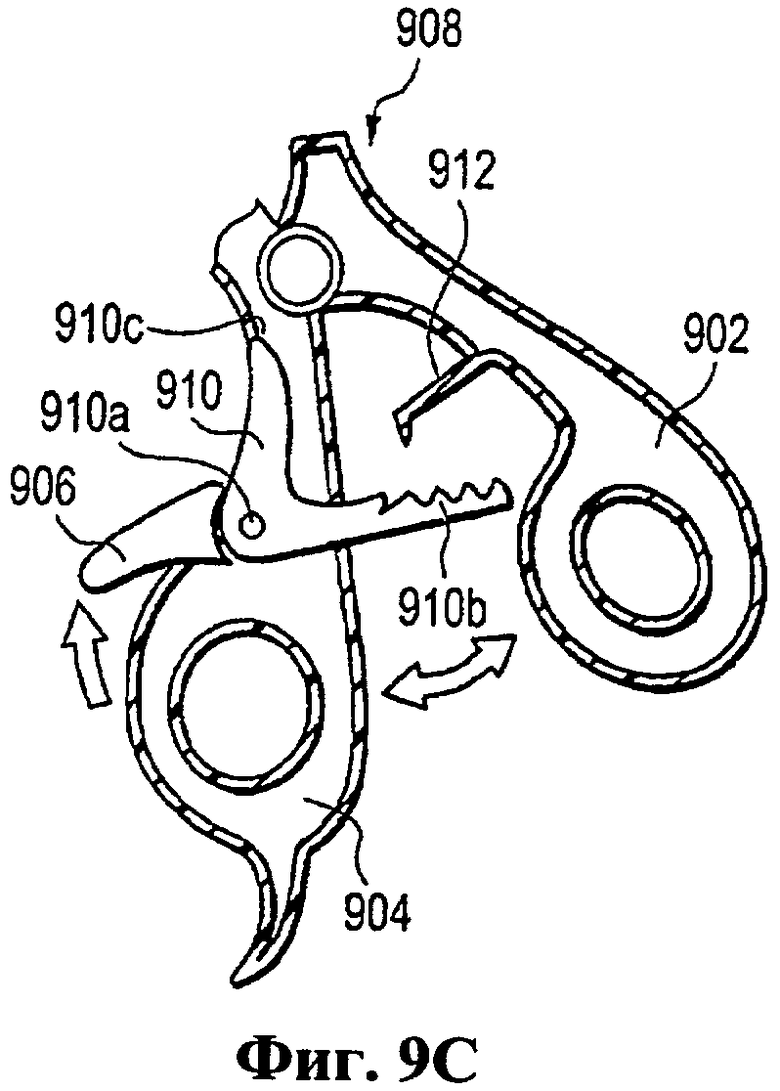
[0062] Фиг.9А-9С иллюстрируют рукоятку 900, включающую пятый вариант храпового механизма 908. Рукоятка включает кольцевой элемент для большого пальца, который 902 с возможностью поворота присоединен к кольцевому элементу для пальцев 904. Храповой механизм 908 включает L-образный элемент 910, который имеет искривленный зубчатый храповой рычаг 910b, проходящий в общем случае проксимально от кольцевого элемента для пальцев 904, плечо рычага 910с проходит в общем случае дистально под острым углом от кольцевого элемента для пальцев 904, и кулачковый надцентровой переключатель 906, с возможностью поворота присоединенный к кольцевому элементу для пальцев 904. L-образный элемент 910 включает поворотную связь 910а к кольцевому элементу для пальцев 904, при этом связь 910а расположена на сопряжении искривленного зубчатого храпового рычага 910b с плечом рычага 910с. Храповой механизм 908 также включает рычаг защелки 912, который проходит вообще дистально от кольцевого элемента для большого пальца 902. L-образный элемент 910 предпочтительно смещен (например, торсионной или листовой пружиной, не показан) так, что искривленный зубчатый храповой рычаг 910b взаимодействует с рычагом защелки 912, когда рукоятка 900 находится в нейтральном состоянии, как показано на фиг.9А. В освобожденном состоянии храпового механизма, показанном на фиг.9В, пользователь освобождает проксимально плечо рычага 910с L-образного элемента 910, таким образом, поднимая искривленный храповой зубчатый рычаг 910b из зацепления с рычагом защелки 912. В состоянии отмены храпового механизма, изображенном на фиг.9С, L-образный элемент 910 перемещается к освобожденному состоянию, показанному на фиг.9В, затем пользователь поднимает вверх кулачковый надцентровой переключатель 906 с тем, чтобы присоединить L-образный элемент 910 выше поворотной связи 910а и удерживать его (910) на месте. Кулачковый надцентровой переключатель 906 предпочтительно включает механическое средство захвата для поддержки освобожденного состояния (например, внутреннюю пружину захвата, штифтовой замок или другое захватывающие средство, известное специалисту). В освобожденном состоянии предпочтительно, чтобы поверхностный контакт между кулачковым рычагом 910с и плечом защелки 912 был достаточным, чтобы сопротивляться смещению плеча защелки в направлении зацепления с зубчатым храповым рычагом 910b.
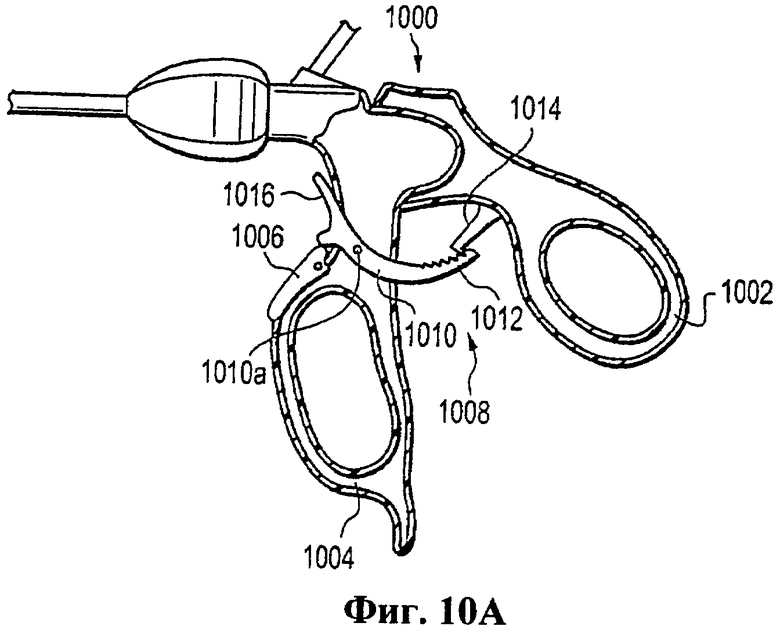
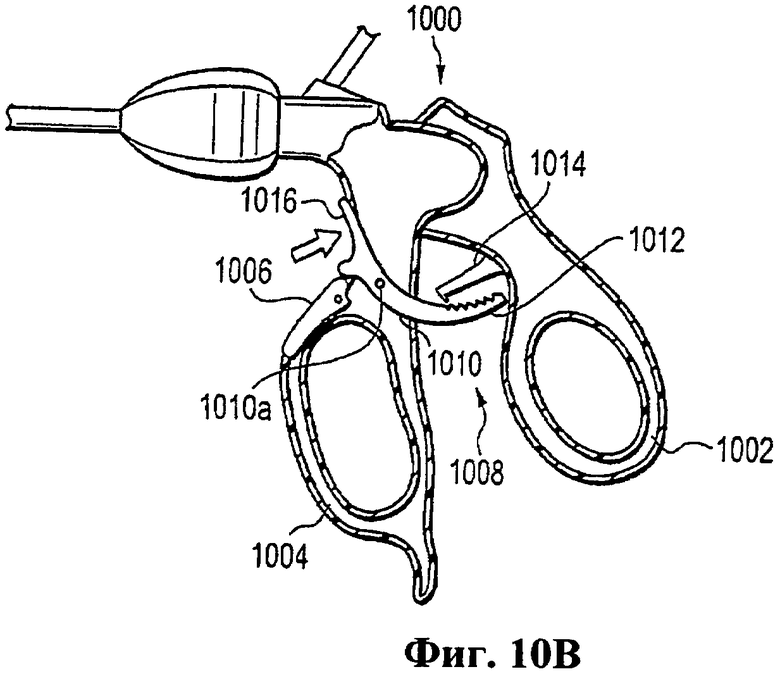
[0063] Фиг.10А-10С показывают рукоятку 1000, включающую шестой вариант храпового механизма 1008. Рукоятка включает кольцевой элемент для большого пальца 1002, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1004. Храповой механизм 1008 включает вообще дугообразный элемент 1010, имеющий искривленный зубчатый храповой рычаг 1012, который проходит вообще проксимально от кольцевого элемента для пальцев 1004, переключающий рычаг 1016, который выступает вообще дистально под острым углом от кольцевого элемента для пальцев 1004 и подцентровой кулачковый переключатель 1006, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1004. В целом дугообразный элемент 1010 включает поворотную связь 1010а к кольцевому элементу для пальцев 1004, при этом связь 1010а расположена в соединении искривленного зубчатого храпового рычага 1012 с переключающим рычагом 1016. Храповой механизм 1008 также включает рычаг защелки 1014, который выступает в целом дистально от кольцевого элемента для большого пальца 1002. В целом дугообразный элемент 1010 предпочтительно смещен (например, торсионной или листовой пружиной, не показана) так, что искривленный зубчатый храповой рычаг 1012 взаимодействует с рычагом защелки 1014, когда рукоятка 1000 находится в нейтральном состоянии, как показано на фиг.10А. В освобожденном состоянии храпового механизма, показанном на фиг.10В, пользователь ослабляет проксимально переключающий рычаг 1016 от в целом дугообразного элемента 1010, таким образом, поднимая искривленный зубчатый храповой рычаг 1012 из зацепления рычагом защелки 1014. В состоянии отмены храпового механизма, изображенном на фиг.10С, в целом дугообразный элемент 1010 перемещается к освобожденному состоянию, показанному на фиг.10В, затем пользователь перемещает вверх подцентровой кулачковый переключатель 1006 для соединения с нижней стороной в целом дугообразного элемента 1010 ниже поворотной связи 1010а, чтобы удержать его (1010) на месте. Подцентровой кулачковый переключатель 1006 предпочтительно удерживается фрикционно в освобожденном положении или альтернативно включает механическое средство захвата для поддержания освобожденного положения (например, внутреннюю пружину захвата, штифтовой замок или другое захватывающие средство, известное специалисту). В освобожденном состоянии предпочтительно, чтобы контакт между переключающим рычагом 1016 и рычагом защелки 1014 был достаточным для оказания сопротивления смещению рычага защелки к зацеплению с зубчатым храповым рычагом 1012.
[0064] Фиг.10A-11В иллюстрируют рукоятку 1100, включающую седьмой вариант храпового механизма 1110. Рукоятка включает кольцевой элемент для большого пальца 1102, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1104. Храповой механизм 1110 включает искривленный зубчатый храповой рычаг 1112, который выступает дистально от кольцевого элемента для большого пальца 1102 и с возможностью скольжения установлен на нем, и захват защелки 1114, который с возможностью поворота присоединен на оси поворота 1114а к кольцевому элементу для пальцев 1104 (смещенному в дистальном/нисходящем положении), захват защелки 1114, включающий проксимально выступающий рычаг защелки 1116. Кольцевой элемент для большого пальца 1102 включает скользящую кнопку отмены 1122, которая присоединена (через канавку 1102а) к искривленному зубчатому храповому рычагу 1112, и которая выполнена с возможностью перемещения искривленного зубчатого храпового рычага 1112 в целом вертикально относительно кольцевого элемента для большого пальца 1102. В нейтральном/взаимодействующем состоянии, показанном на фиг.11А, рычаг защелки 1116 зацеплен с зубчатым храповым рычагом 1112, который находится в верхнем положении относительно канавки 1102а. Храповой механизм 1110 может быть освобожден пользователем, освобождающим захват защелки 1114 так, что она поворачивается вообще проксимально/вверх (против ее смещения) относительно кольцевого элемента для пальцев 1104, который расцепляет рычаг защелки 1116 от храпового зубчатого рычага 1112. В состоянии отмены храпового механизма, изображенном на фиг.11В, скользящая кнопка отмены 1122 сдвига перемещена вниз в бороздку 1102а, отменяя зацепление зубчатого храпового рычага 1112 с рычагом защелки 1116.
[0065] Фиг.12А-12С иллюстрируют рукоятку 1200, включающую восьмой вариант храпового механизма 1210, который является по существу внутренним механизмом. Рукоятка 1200 включает кольцевой элемент для большого пальца 1202, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1204. Храповой механизм 1208 включает расположенную с возможностью скольжения кнопку 1212 кулачка, расположенный с возможностью поворота рычаг защелки 1214 (вращающийся вокруг поперечной оси поворота 1214b), и расположенный с возможностью скольжения почти вертикальный переключающий элемент отмены 1216 в верхней области кольцевого элемента для пальцев 1204. Зубчатый храповой элемент 1218 расположен в кольцевом элементе для большого пальца 1202, проксимально смежно с рычагом защелки 1214. В нейтральном/взаимодействующем положении, показанном на фиг.12А, нижний конец 1214а рычага защелки 1214 взаимодействует с зубцами зубчатого храпового элемента 1218. Как изображено на фиг.12В, чтобы освободить рычаг защелки 1214 из зацепления с зубчатым храповым элементом 1218, пользователь может освободить кнопку 1212 кулачка в проксимальном направлении против рычага защелки 1214, который поднимает его (1214) от зубчатого храпового элемента 1218. Фиг.12С иллюстрирует, что храповое зацепление может быть отменено освобождением кулачковой кнопки 1212 в освобожденное состояние, и затем перемещением переключающего элемента отмены 1216 в зацепление с выемкой освобождающего замка 1216а на кулачковой кнопке 1212.
[0066] Фиг.13А-13С иллюстрируют рукоятку 1300, включающую девятый вариант храпового механизма 1310, который является также по существу внутренним механизмом. Рукоятка 1300 включает кольцевой элемент для большого пальца 1302, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1304. Храповой механизм 1310 включает расположенную с возможностью скольжения кулачковую кнопку 1312, расположенный с возможностью поворота, почти вертикальный рычаг защелки 1314 (вращающийся вокруг поперечной оси поворота 1314b) и расположенный с возможностью поворота переключающий элемент отмены 1316 в верхней области кольцевого элемента для пальцев 1304. Зубчатый храповой элемент 1318 расположен в кольцевом элементе для большого пальца 1302, проксимально смежно с рычагом защелки 1314. В нейтральном/взаимодействующем положении, показанном на фиг.13А, нижний конец 1314а рычага защелки 1314 взаимодействует с зубцами зубчатого храпового элемента 1318. Как изображено на фиг.13В, чтобы освободить рычаг защелки 1314 из зацепления с зубчатым храповым элементом 1318, пользователь может ослабить кулачковую кнопку 1312 в проксимальном направлении против рычага защелки 1314, который перемещает его (1314) вокруг поперечной оси поворота 1314b так, что нижний рычаг защелки второй 1314а выходит из зацепления с зубчатым храповым элементом 1318. Фиг.13С показывает, что храповое зацепление может быть отменено ослаблением кулачковой кнопки 1312 в освобожденное состояние, и затем поворотом переключающего элемента отмены 1316 так, что его дистальный конец 1316а входит в зацепление с выемкой замка отмены 1312а на кулачковой кнопке 1312.
[0067] Фиг.14А-14С иллюстрируют рукоятку 1400, включающую десятый вариант храпового механизма 1410. Рукоятка включает кольцевой элемент для большого пальца 1402, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1404. Храповой механизм 1410 включает искривленный зубчатый храповой рычаг 1412, который выступает дистально от кольцевого элемента для большого пальца 1402 и с возможностью скольжения установлен на нем. Он (1410) также включает рычаг освобождения 1406, который с возможностью поворота установлен на кольцевом элементе для пальцев 1404, и элемент защелки 1414, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1404, при этом элемент защелки 1414 включает проксимально выступающий рычаг защелки 1416. Нижний конец 1406а рычага освобождения 1406 взаимодействует для скользящего/поворотного действия с верхним концом 1414а элемента защелки 1414, поскольку ось 1406b на нижнем конце рычага 1406а взаимодействует с закрытой щелью 1414b на верхнем конце элемента защелки 1414а. Кольцевой элемент для большого пальца 1402 включает скользящую кнопку отмены 1422, которая присоединена (через бороздку 1402а) к искривленному зубчатому храповому рычагу 1412 и которая выполнена с возможностью перемещения искривленного зубчатого храпового рычага 1412 вообще вертикально относительно кольцевого элемента для большого пальца 1402. В нейтральном/взаимодействующем состоянии, показанном на фиг.14А, рычаг защелки 1416 смещен в зацепление (например, торсионной пружиной) с зубчатым храповым рычагом 1412, который находится в верхнем положении внутри бороздки 1402а. Как показано на фиг.14В, храповой механизм 1410 может быть освобожден пользователем, ослабляющим рычаг освобождения 1406 так, что его верхний конец 1414а перемещается вообще проксимально относительно кольцевого элемента для пальцев 1404, который перемещает ось рычага 1406b в щель защелки 1414b так, что элемент защелки 1414 поворачивается и расцепляет рычаг защелки 1416 от зубчатого храпового рычага 1412. В состоянии отмены храпового механизма, изображенном на фиг.14С, скользящая кнопка отмены 1422 перемещена вниз в бороздку 1402а, отменяя взаимодействие зубчатого храпового рычага 1412 с рычагом защелки 1416. Как также показано на фиг.14С, в этом варианте не нужно освобождать храповое зацепление (например, ослабляя рычаг освобождения 1406) перед отменой храпового механизма 1410.
[0068] Фиг.15А-15В иллюстрируют рукоятку 1500, включающую одиннадцатый вариант храпового механизма 1510. Рукоятка включает кольцевой элемент для большого пальца 1502, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1504. Храповой механизм 1510 включает искривленный зубчатый храповой рычаг 1512, который выступает дистально от кольцевого элемента для большого пальца 1502, рычаг защелки 1514, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1504, и кулачковый рычаг 1516, с возможностью поворота связанный с рычагом защелки 1514. Проксимальный конец 1514а рычага защелки 1514 предпочтительно смещен в зацепление с храповым зубчатым рычагом 1512 (например, торсионной или листовой пружиной, не показана). Дистальная концевая область рычага защелки 1514 включает удлиненное отверстие 1514b, которое взаимодействует с поперечной осью 1514с, присоединенной к кольцевому элементу для пальцев 1504. В нейтральном/взаимодействующем состоянии, показанном на фиг.15А, проксимальный конец рычага защелки 1514а взаимодействует с зубчатым храповым рычагом 1512, а поперечная ось 1514с находится на заднем конце удлиненного отверстия 1514b. Чтобы достичь освобожденного состояния храпового механизма, изображенного на фиг.15В, пользователь приводит в действие рычаг защелки 1514 проксимально и немного вниз, пока поперечная ось 1514с находится в верхнем конце удлиненного отверстия 1514b, который поднимает проксимальный конец рычага защелки 1514 из зацепления с храповым зубчатым рычагом 1512. Чтобы достичь состояния отмены храпового механизма, изображенного на фиг.15С, пользователь приводит рычаг защелки 1514 в освобожденное состояние, и затем поворачивает кулачковый рычаг 1516 дистально и вниз. В состоянии отмены предпочтительно, чтобы контакт между кулачковым рычагом 1516, рычагом защелки 1514 и кольцевым элементом для пальцев 1504 был осуществлен, чтобы образовать фрикционное зацепление, достаточное для оказания сопротивления смещению рычага защелки 1514 в направлении зацепления с зубчатым храповым рычагом 1512.
[0069] Фиг.16А-16С иллюстрируют рукоятку 1600, включающую двенадцатый вариант храпового механизма 1608. Рукоятка 1600 включает кольцевой элемент для большого пальца 1602, который с возможностью поворота присоединен к кольцевому элементу для пальцев 1604. Храповой механизм 1608 включает расположенный с возможностью поворота кулачковый переключатель 1612, расположенный с возможностью поворота элемент защелки 1614 (поворачивающийся вокруг поперечной оси поворота 1614b), и расположенный с возможностью поворота переключающий элемент отмены 1616 в верхней, продольной области кольцевого элемента для пальцев 1604. Зубчатый храповой элемент 1618 расположен в кольцевом элементе для большого пальца 1602, проксимально смежно с элементом защелки 1614. Кольцевой элемент для пальцев 1604 включает проксимальную полость 1604а, выполненную с возможностью приема дистальной концевой части зубчатого храпового элемента 1618, когда элементы рукоятки 1602, 1604 соединены вместе. Элемент защелки 1614 - вообще L-образный, с маленьким кулачковым выступом 1614а, выступающим дистально от его верхнего конца, и установлен на оси поворота 1614b. В нейтральном/взаимодействующем положении, показанном на фиг.16А, элемент защелки 1614 предпочтительно смещен (например, пружиной или другим средствам смещения, не показано) так, что нижний конец 1614с зацеплен с зубцами храпового зубчатого элемента 1618. Как изображено на фиг.16В, чтобы освободить рычаг защелки 1614 из зацепления с зубчатым храповым элементом 1618, пользователь может ослабить кулачковый переключатель 1612 в проксимальном направлении против кулачкового выступа 1614а элемента защелки 1614. Проксимальная поверхность кулачкового переключателя 1612, предпочтительно является угловой так, чтобы ее контакт с кулачковым выступом 1614а поднимал нижний конец элемента защелки 1614с от зубчатого храпового элемента 1618. Фиг.16С показывает, что храповое зацепление может быть отменено ослаблением кулачкового переключателя 1612 в освобожденное состояние, и затем поворотом переключающего элемента отмены 1616 так, что его проксимальный конец 1616а входит во взаимодействие с выемкой отмены 1614d на кулачковом переключателе 1612.
[0070] Фиг.17А-17С иллюстрируют рукоятку 1700, включающую тринадцатый вариант храпового механизма 1708. Рукоятка включает кольцевой элемент для большого пальца 1702, с возможностью поворота присоединенный к кольцевому элементу для пальцев 1704. Храповой механизм 1708 включает вообще дугообразный храповой элемент рычага 1710, который имеет искривленный зубчатый храповой рычаг 1712, выступающий вообще проксимально от кольцевого элемента для пальцев 1704 и переключающий рычаг, 1716, выступающий вообще дистально от кольцевого элемента для пальцев 1704. Переключатель отмены 1718 расположен ниже и немного дальше от переключающего рычага 1716. Храповой элемент рычага 1710 включает поворотную связь 1710а к кольцевому элементу для пальцев 1704, при этом связь 1710а располагается около продольного центра как элемента храпового рычага 1710, так и кольцевого элемента для пальцев 1704. Храповой механизм 1708 также включает фиксированный рычаг защелки 1714, выступающий вообще дистально от кольцевого элемента для большого пальца 1702. Элемент храпового рычага 1710 предпочтительно смещен (например, торсионной или листовой пружиной, или другими средствами смещения, не показаны) так, что искривленный зубчатый храповой рычаг 1712 зацепляет рычаг защелки 1714, когда рукоятка 1700 находится в нейтральном состоянии, как показано на фиг.17А. В освобожденном состоянии храпового механизма, показанном на фиг.17В, пользователь ослабляет проксимально переключающий рычаг 1716 элемента храпового рычага 1710, таким образом, поднимая искривленный зубчатый храповой рычаг 1712 из зацепления с рычагом защелки 1714. В состоянии отмены храпового механизма, изображенном на фиг.17С, элемент храпового рычага 1710 перемещается в освобожденное состояние, показанное на фиг.17В, затем пользователь может повернуть переключатель отмены 1718 для контакта с нижней стороной элемента храпового рычага 1710, чтобы удержать его (1710) на месте. Переключатель 1718 отмены предпочтительно включает фрикционное или другое средство захвата для поддержания его в освобожденной/отмененной позиции (например, внутреннюю пружину захвата, штифтовой замок или другое захватывающие средство, известное специалисту).
[0071] Специалистам будет понятно, что известны средства управления относительным положением/смещением храповых элементов, раскрытые выше, которые приемлемы для использования в рамках настоящего изобретения, и что другие материалы могут быть использованы в вариантах настоящего изобретения. Специалистам также будет понятно, что для вариантов рукоятки настоящего изобретения кольцевой элемент для большого пальца и/или кольцевой пальцевый элемент возможно фактически не требует закрытой кольцевой конструкции, но может включать открытое кольцо или поддерживающую конструкцию другой формы для большого пальца и пальцев пользователя соответственно. Это означает, что предшествующее детальное описание расценивается как иллюстративное, а не ограничивающее. Должно быть понятно, что следующие пункты формулы, включая все эквиваленты, предназначены для определения сущности и объема этого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКТИВНЫЙ ЭЛЕМЕНТ ДЛЯ ПОВТОРНОГО ВХОДА В ЗАЦЕПЛЕНИЕ ПРЕДОХРАНИТЕЛЬНОГО ПЕРЕКЛЮЧАТЕЛЯ СШИВАЮЩЕГО ТКАНЬ АППАРАТА | 2012 |
|
RU2618953C2 |
| КОНСТРУКЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОШИБОК ДЛЯ УЗЛОВ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2672524C2 |
| КОНСТРУКЦИИ ПРОВОДНИКОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ И ВРАЩАЮЩИМИСЯ КОНЦЕВЫМИ ЭФФЕКТОРАМИ | 2014 |
|
RU2684036C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2014 |
|
RU2676512C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ (ВАРИАНТЫ) И СИСТЕМА ЭЛЕКТРОПИТАНИЯ ДЛЯ ПОДАЧИ ЭЛЕКТРОПИТАНИЯ НА ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2014 |
|
RU2685464C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ПЛАСТИКОВОЙ СМЫКАЮЩЕЙ ПЛАНКОЙ | 2006 |
|
RU2430692C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С АЛЮМИНИЕВОЙ ГОЛОВКОЙ | 2006 |
|
RU2432915C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВОЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434592C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |

Изобретение относится к медицине и может быть использовано для управления дистальным инструментальным концом лапароскопического устройства. Лапароскопическое хирургическое устройство включает храповой механизм. Храповой механизм имеет единственную кнопку или рычаг, которые могут быть использованы для освобождения или отмены храпового зацепления. Технический результат - повышение безопасности и простоты использования. 8 н. и 17 з.п. ф-лы, 17 ил.
1. Хирургический инструмент, имеющий рукоятку, оперативно соединенную с удлиненным валом, при этом рукоятка включает:
кольцевой элемент для большого пальца, с возможностью поворота связанный с кольцевым элементом для пальцев;
первый элемент зацепления, фиксированный на и выступающий в целом дистально от кольцевого элемента для большого пальца;
второй элемент зацепления, с возможностью поворота установленный на и выступающий в целом проксимально от кольцевого элемента для пальцев, при этом первая концевая часть второго элемента зацепления смещена в зацепление с первым элементом зацепления и определяющий состояния взаимодействия; и
удлиненный кулачковый элемент, с возможностью поворота связанный с кольцевым элементом для пальцев и включающий рабочий контакт со второй концевой частью второго элемента зацепления;
в котором, когда удлиненный кулачковый элемент находится под первым углом относительно второго элемента зацепления, рабочий контакт достаточен, чтобы повернуть второй элемент зацепления так, чтобы преодолеть смещенное взаимодействие второго элемента зацепления с первым элементом зацепления, определяющим освобожденное состояние;
в котором, когда удлиненный кулачковый элемент находится под вторым углом относительно второго элемента зацепления, рабочий контакт достаточен, чтобы повернуть второй элемент зацепления так, чтобы преодолеть смещенное взаимодействие второго элемента зацепления с первым элементом зацепления, и достаточен, чтобы сместить второй элемент зацепления из зацепления с первым элементом зацепления, определяющим состояние отмены, и
в котором удлиненный кулачковый элемент, первый элемент зацепления и второй элемент зацепления выполнены таким образом, что когда рукоятка занимает состояние взаимодействия, удлиненный кулачковый элемент занимает среднее положение между первым углом и вторым углом.
2. Хирургический инструмент по п.1, в котором рабочий контакт рукоятки с удлиненным валом включает:
внешне показанную поворотную головку, присоединенную к внешней поверхности удлиненного вала, при этом головка выполнена таким образом, чтобы вращать удлиненный вал вокруг его продольной оси; и обеспечивающее поворот удерживающее соединение второго элемента рукоятки с удлиненным валом.
3. Хирургический инструмент по п.2, далее включающий:
указанную стопорящую связь второго элемента рукоятки с удлиненным валом, при этом указанная стопорящая связь включает:
шариковый стопор, расположенный в полости, смежной с дистальным концом второго элемента рукоятки;
имеющую продольные бороздки часть внешней поверхности около проксимального конца удлиненного вала; и о-образное кольцо, при этом упомянутое о-образное кольцо удерживает шариковый стопор в полости и смещает шариковый стопор в указанный контакт с имеющей продольные бороздки частью внешней поверхности удлиненного вала.
4. Хирургический инструмент по п.1, в котором удлиненный вал включает стержень приведения в действие, проходящий продольно через него, при этом стержень приведения в действие включает конструкцию задержания стержня на проксимальном конце, которая имеет больший диаметр, чем длина большей части стержня приведения в действие; и кольцевой элемент для большого пальца, включающий фиксатор стержня приведения в действие, при этом фиксатор стержня приведения в действие включает дистальную запирающую бороздку, формируемую, чтобы вместить конструкцию задержания проксимального конца.
5. Хирургический инструмент по п.4, далее включающий в целом трубчатый несущий элемент, расположенный, по крайней мере, частично вокруг проксимальной части стержня приведения в действие.
6. Хирургический инструмент по п.5, в котором в целом трубчатый несущий элемент обеспечивает электрическую изоляцию вокруг, по крайней мере, проксимальной части стержня приведения в действие.
7. Хирургический инструмент по п.5, в котором в целом трубчатый несущий элемент включает соединитель для удержания стержня приведения в действие.
8. Хирургический инструмент по п.4, далее включающий электрод, находящийся в проводящем контакте со стержнем приведения в действие.
9. Хирургический инструмент по п.4, в котором конструкция удержания стержня на проксимальном конце в целом является сферической.
10. Хирургический инструмент по п.4, в котором металлическая вставка расположена в дистальной ключевидной бороздке.
11. Хирургический инструмент по п.1, в котором удлиненный вал включает стержень приведения в действие, проходящий продольно через него, и часть внешней поверхности с продольными бороздками около проксимального конца удлиненного вала.
12. Хирургический инструмент по п.11, в котором кольцевой элемент для пальцев включает в целом цилиндрический несущий компонент, расположенный в верхней его области, при этом несущий компонент включает:
центральный продольный просвет, через который полностью проходит проксимальная часть стержня приведения в действие, при этом дистальная часть упомянутого просвета расположена вокруг внешней проксимальной части с продольными бороздками удлиненного вала;
шариковый стопор, расположенный в полости в дистальной части несущей поверхности; и бороздку, непосредственно смежную с полостью, при этом упомянутая бороздка вмещает о-образное кольцо, а упомянутое о-образное кольцо выполнено с возможностью удержания шарикового стопора в полости и смещения шарикового стопора в указанный контакт с имеющей продольные бороздки внешней проксимальной частью удлиненного вала.
13. Хирургический инструмент по п.12, в котором удлиненный вал удерживается в дистальной части упомянутого просвета за счет соединителя с резьбовым сочленением.
14. Хирургический инструмент по п.1, далее включающий амортизационную вставку, расположенную в области, выбранной из кольцевого элемента для пальцев, кольцевого элемента для большого пальца или в обеих областях.
15. Хирургический инструмент по п.1, далее включающий опору для пальца, в целом выступающую вниз от кольцевого элемента для пальцев.
16. Хирургический инструмент по п.1, далее включающий текстурированную поверхность на верхней проксимальной поверхности кольцевого элемента для большого пальца.
17. Хирургический инструмент по п.1, далее включающий текстурированную поверхность на промежуточной боковой поверхности кольцевого элемента для большого пальца.
18. Хирургический инструмент по п.1, в котором верхняя часть кольцевого элемента для большого пальца и верхняя часть кольцевого элемента для пальцев выполнены и соединены так, что стержень приведения в действие, расположенный с возможностью скольжения через кольцевой элемент для пальцев и связанный с кольцевой частью для большого пальца, огражден от контакта с рукой пользователя.
19. Хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом по п.1, при этом кольцевой элемент для большого пальца включает множество рельефных захватывающих выступов для большого пальца, расположенных на верхней проксимальной поверхности кольцевого элемента для большого пальца, а упомянутые выступы выполнены с возможностью обеспечения фрикционной поверхности захвата.
20. Хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом по п.1, при этом кольцевой элемент для большого пальца включает множество рельефных захватывающих выступов для большого пальца, расположенных на промежуточной боковой поверхности кольцевого элемента для большого пальца, при этом упомянутые выступы выполнены с возможностью обеспечения фрикционной поверхности захвата.
21. Хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом, при этом рукоятка включает:
первый элемент рукоятки, с возможностью поворота связанный со вторым элементом рукоятки; и храповой механизм, с возможностью поворота взаимодействующий с первым и вторым элементами рукоятки;
при этом храповой механизм включает:
зубчатый храповой элемент зацепления, фиксированный на и выступающий в целом дистально от первого элемента рукоятки;
L-образный элемент защелки, имеющий часть кулачковой лапки и часть лапки защелки, в целом перпендикулярную части кулачковой лапки,
L-образный элемент защелки, с возможностью поворота установленный во втором элементе рукоятки так, что часть лапки защелки выступает в целом проксимально от второго элемента рукоятки,
верхнюю область части кулачковой лапки, включающую в целом вертикальную кулачковую поверхность и дистально выступающую кулачковую поверхность;
кулачковый рычаг;
пружину смещения, установленную во втором элементе рукоятки и оперативно контактирующую с L-образным элементом защелки так, что проксимальная концевая область части лапки защелки смещается в зацепление с зубчатым храповым элементом зацепления, когда кулачковый рычаг расположен под нейтральным углом; и
упомянутый кулачковый рычаг, с возможностью поворота связанный со вторым элементом рукоятки, при этом кулачковый рычаг включает первый рабочий контакт с L-образным элементом защелки такой, что, когда кулачковый элемент расположен под первым углом относительно L-образного элемента защелки, первый рабочий контакт расположен между кулачковым рычагом и дистально выступающей кулачковой поверхностью, упомянутый первый рабочий контакт достаточен для поворота L-образного элемента защелки с целью преодоления и освобождения смещенного зацепления части лапки защелки с зубчатым храповым элементом зацепления; и
в котором, когда кулачковый рычаг расположен под вторым углом относительно L-образного элемента защелки, второй рабочий контакт между кулачковым рычагом и в целом вертикальной кулачковой поверхностью достаточен для поворота L-образного элемента защелки с целью преодоления и отмены смещенного зацепления части лапки защелки с зубчатым храповым элементом зацепления и также достаточен для смещения L-образного элемента защелки под углом, при котором часть лапки защелки не взаимодействует с зубчатым храповым элементом зацепления; и
в котором нейтральный угол кулачкового рычага находится между первым углом и вторым углом относительно L-образного элемента защелки.
22. Храповой механизм с единственной кнопкой освобождения/отмены для рукоятки хирургического устройства, включающий:
элемент кулачковой кнопки, элемент защелки в оперативном контакте с элементом кулачковой кнопки, элемент смещения и храповой элемент;
в котором, когда механизм находится в состоянии храпового зацепления, элемент кулачковой кнопки находится в нейтральном первом положении таком, что рабочий контакт является минимальным, и элемент смещения смещает элемент защелки в зацепление с храповым элементом;
в котором, когда механизм находится в состоянии освобождения храпового зацепления, элемент кулачковой кнопки находится во втором положении таком, что рабочий контакт оказывает сопротивление смещению элемента смещения и освобождает элемент защелки из зацепления с храповым элементом; и
в котором, когда механизм находится в состоянии отмены храпового взаимодействия, элемент кулачковой кнопки находится в третьем положении, отличном от второго положения, так, что рабочий контакт смещает элемент защелки из зацепления с храповым элементом; и
в котором нейтральное первое положение находится между вторым положением и третьим положением.
23. Способ использования хирургического инструмента, включающий операции:
обеспечение хирургического инструмента, имеющего рукоятку, при этом рукоятка хирургического инструмента включает:
кольцевой элемент для большого пальца, с возможностью поворота связанный с кольцевым элементом для пальцев;
зубчатый храповой рычаг, фиксированный в и выступающий в целом дистально от кольцевого элемента для большого пальца;
L-образный элемент защелки, с возможностью поворота установленный на и включающий первую концевую часть, выступающую в целом проксимально от кольцевого элемента для пальцев; и кулачковый рычаг, с возможностью поворота связанный с кольцевым элементом для пальцев и включающий рабочий контакт со второй концевой частью элемента защелки, при этом первая концевая часть элемента защелки смещена пружиной в зацепление с зубчатым храповым рычагом, когда кулачковый рычаг находится под первым заданным углом относительно кольцевого элемента для пальцев;
поворот кулачкового рычага на второй угол относительно кольцевого элемента для пальцев, в котором рабочий контакт достаточен для поворота элемента защелки, чтобы преодолеть смещение пружины и освободить зацепление первой концевой части элемента защелки с зубчатым храповым рычагом; и
поворот кулачкового рычага на третий угол относительно кольцевого элемента для пальцев таким образом, что пружина смещает вторую концевую часть элемента защелки против кулачкового рычага так, что зацепление первой концевой части элемента защелки с зубчатым храповым механизмом отменяется, в котором положение кулачкового рычага под первым углом находится между положением кулачкового рычага под вторым углом и под третьим углом.
24. Хирургический инструмент, имеющий храповой механизм рукоятки, характеризующийся единственной кнопкой освобождения/отмены, при этом храповой механизм рукоятки включает:
первый элемент зацепления;
второй элемент зацепления, с возможностью поворота прикрепленный к части рукоятки и выступающий в направлении первого элемента зацепления,
элемент пружины, сдвигающий первую концевую часть второго элемента зацепления в зацепление с первым элементом зацепления; и
кулачковую кнопку, с возможностью поворота связанную с частью рукоятки и включающую рабочий контакт со второй концевой частью второго элемента зацепления:
в котором, когда кулачковая кнопка находится под первым углом относительно второго элемента зацепления, рабочий контакт достаточен для поворота второго элемента зацепления так, чтобы преодолеть смещенное зацепление второго элемента зацепления с первым элементом зацепления;
в котором, когда кулачковая кнопка находится под вторым углом относительно второго элемента зацепления, рабочий контакт достаточен для поворота второго элемента зацепления так, чтобы преодолеть смещенное зацепление второго элемента зацепления с первым элементом зацепления, и достаточен, чтобы сместить второй элемент зацепления из зацепления с первым элементом зацепления; и
в котором, когда кулачковая кнопка находится под третьим углом, между первым и вторым углами, рабочий контакт делает возможным смещенное зацепление второго элемента зацепления с первым элементом зацепления.
25. Хирургический инструмент, имеющий рукоятку, оперативно связанную с удлиненным валом, при этом рукоятка включает:
кольцевой элемент для большого пальца, с возможностью поворота связанный с кольцевым элементом для пальцев;
зубчатый первый элемент зацепления, входящий в кольцевой элемент для большого пальца,
второй элемент зацепления, с возможностью поворота установленный в кольцевом элементе для пальцев, и
удлиненный кулачковый элемент, подвижно связанный с кольцевым элементом для пальцев и включающий рабочий контакт со второй концевой частью второго элемента зацепления;
в котором первая концевая часть второго элемента зацепления смещена элементом пружины в зацепление с зубчатым первым элементом зацепления, когда удлиненный кулачковый элемент расположен в нейтральном положении;
в котором, когда удлиненный кулачковый элемент находится в первом положении относительно второго элемента зацепления, рабочий контакт достаточен для перемещения второго элемента зацепления так, что рабочий контакт обеспечивает силу, достаточную, чтобы преодолеть смещенное зацепление второго элемента зацепления с зубчатым первым элементом зацепления;
в котором, когда удлиненный кулачковый элемент находится во втором положении относительно второго элемента зацепления, рабочий контакт достаточен для перемещения второго элемента зацепления, чтобы преодолеть смещенное зацепление второго элемента зацепления с первым элементом зацепления и достаточен, чтобы сместить второй элемент зацепления из зацепления с первым элементом зацепления, и
в котором нейтральное положении удлиненного кулачкового элемента находится между первым положением и вторым положением.
| US 5827323 А, 27.10.1998 | |||
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2001 |
|
RU2240740C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2121310C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2000 |
|
RU2187249C2 |
| Способ получения (бис-триметилсилил) ( -циано-третамил)фосфита | 1975 |
|
SU555105A1 |
| АППАРАТ О.Б.ОСПАНОВА ДЛЯ КОМПРЕССИОННЫХ АНАСТОМОЗОВ | 1998 |
|
RU2128012C1 |
| US 4591085 А, 27.05.1986 | |||
| DE 10353552 А1, 30.06.2005 | |||
| Хирургические сшивающие аппараты и их клиническое применение | |||
| - М.: Внешторгиздат, 1966, с.44, рис.58 | |||
| ФЕДОРОВ И.В | |||
| Хирургические | |||

