Область изобретения
Настоящее изобретение относится, по существу, к хирургическим инструментам для наложения скобок, которые способны наносить линии скобок на ткань, одновременно прорезая ткань между этими линиями скобок, и, более конкретно, к улучшениям, относящимся к инструментам для наложения скобок и улучшениям в процессах для формирования различных компонентов таких инструментов для наложения скобок, которые обеспечивают срабатывание при многократном ходе пускового курка.
Предпосылки создания изобретения
Эндоскопическим хирургическим инструментам часто отдают предпочтение по сравнению с традиционными устройствами для открытой хирургии, поскольку разрезы меньшего размера быстрее заживают и менее подвержены осложнениям. Следовательно, существенное развитие получил ряд эндоскопических хирургических инструментов, которые позволяют осуществить точное позиционирование рабочего органа на дистальном конце в нужном месте для хирургического вмешательства через канюлю троакара. Эти рабочие органы на дистальном конце воздействуют на ткань разными способами для получения диагностического или лечебного эффекта (например, эндоскальпель, захват, скальпель, устройства для наложения скобок, устройства для нанесения зажимов, устройства доступа, устройства для введения лекарств и устройства для подачи энергии, использующие ультразвуковое, высокочастотное или лазерное излучение и пр.)
Известные хирургические устройства для наложения скобок содержат концевой эффектор, который одновременно делает продольный разрез и наносит линии скобок на противоположные стороны разреза. Концевой эффектор содержит пару взаимодействующих элементов губок, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить через канал канюли. Один из элементов губок содержит обойму скобок, имеющую по меньшей мере два разнесенных в поперечном направлении ряда скобок. Второй элемент губки образует матрицу, имеющую загибающие скобку лунки, совмещенные с рядами скобок в обойме. Инструмент содержит множество совершающих возвратно-поступательные перемещения клиньев, которые при приведении в действие дистально, проходят в отверстия в обойме скобок и взаимодействуют с приводными элементами, поддерживающими скобки, для выталкивания скобок в направлении матрицы.
Пример такого хирургического устройства для наложения скобок для эндоскопического применения описан в патенте США № 5465895, которое преимущественно осуществляет отдельные операции захвата и выталкивания. Благодаря этому врач имеет возможность сомкнуть элементы губок на ткани для позиционирования ткани перед наложением скобки. После того, как врач определит, что элементы губок правильно захватили ткань, врач может затем наложить хирургическую скобку единственным рабочим ходом, тем самым прорезая и скрепляя ткань. Одновременное прорезание и скрепление позволяет избежать осложнений, которые могут возникнуть при последовательном выполнении этих операций разными хирургическими инструментами, которые соответственно осуществляют или разрезание, или наложение скобки.
Одно конкретное преимущество наличия возможности смыкать ткань перед наложением скобки заключается в том, что врач через эндоскоп может проверить, что инструмент находится в нужном положении для разреза и между противоположными губками находится достаточное количество ткани. В противном случае противолежащие губки могут подойти слишком близко друг к другу, особенно сомкнувшись дистальными концами, и тем самым не смогут сформировать загнутые скобки в разрезанной ткани. Другой крайностью является слишком большое количество зажатой ткани, которое может вызвать стягивание и неполное наложение скобок.
По существу единственный смыкающий ход и единственный рабочий ход наложения скобки является удобным и эффективным способом осуществления разрезания и наложения скобок. Однако в некоторых случаях было бы желательно осуществлять несколько рабочих ходов наложения скобок. Например, хирурги могут выбирать из ряда размеров губок соответствующую длину обоймы скобок для требуемой длины разреза. Более длинная обойма требует более длинного рабочего хода. Следовательно, для наложения скобок требуется пусковой курок, приводимый в действие рукой, чтобы прилагать достаточно большое усилие к этим длинным обоймам скобок, чтобы разрезать больше ткани и перемещать больше скобок по сравнению с более короткими обоймами скобок. Было бы желательно снизить это усилие и сделать его сравнимым с усилием для коротких обойм, и это усилие не должно превышать возможности ладони некоторых хирургов. Кроме того, некоторые хирурги, не знакомые с более крупными обоймами, могут подумать, что возникло стягивание или другая неисправность, потребовавшая неожиданно большого усилия для срабатывания.
Один подход для снижения усилия для наложения скобок заключается в применении храпового механизма, который позволяет многократно нажимать пусковой курок, как описано в патентах США №№ 5762256 и 6330965. Однако считается, что передача возвратно-поступательного движения пускового курка непосредственно на жесткую рейку с помощью собачки ограничивает конструктивные возможности для обеспечения нужного расстояния при рабочем движении во время каждого хода наложения скобки. Кроме того, эти известные хирургические инструменты для наложения скобок с многоходовыми рабочими механизмами не обладают преимуществом раздельных операций смыкания и наложения скобки.
Следовательно, существует значительная потребность в хирургическом инструменте для наложения скобок, в котором используются множественные рабочие ходы наложения скобок для достижения требуемой длины разрезания и сшивания с желательным соотношением длины хода выталкивания и продольного движения наложения скобки, создаваемого концевым рабочим органом.
Краткое описание изобретения
Настоящее изобретение преодолевает вышеописанные недостатки известного уровня техники в предлагаемом хирургическом инструменте для наложения скобок и разрезания, имеющем роторную передачу, которая передает последовательность множественных ходов наложения скобок, одновременно предотвращая обратный ход рабочего элемента. Тем самым концевой рабочий орган инструмента, требующий повышенного усилия наложения скобок и/или увеличенного рабочего хода наложения скобки можно легко приводить в действие многоходовым пусковым механизмом. В то же время инструмент наделен способностью выполнять отдельную операцию смыкания, что позволяет хирургу позиционировать ткань без необходимости приведения в действие концевого рабочего органа.
В одном аспекте настоящего изобретения хирургический инструмент имеет концевой рабочий орган, который реагирует на продольное выталкивающее движение для проведения хирургической операции. Пользователь приводит в движение исполнительный привод выталкивания для создания движения, которое селективно передается выталкивающим механизмом. Более конкретно, кулачковый диск имеет множество кулачковых контуров, расположенных по меньшей мере на части его окружности, которые соответственно взаимодействуют с ведущим клином, соединенным с приводом выталкивания при осуществлении движения срабатывания. Кулачковый диск соединен с зубчатой рейкой зубчатым зацеплением для преобразования этого прерывистого вращательного движения в продольное движение выталкивания.
Согласно другому аспекту настоящего изобретения хирургический инструмент имеет концевой рабочий орган, который разрезает ткань и накладывает скобки. В частности, конец, накладывающий скобки, имеет матрицу, имеющую поверхность, формирующую скобку, выполненную подвижной из открытого положения, отстоящего от множества скобок в закрытое положение, примыкающее к множеству скобок. Механизм наложения скобок имеет вращающийся кулачковый элемент с по меньшей мере одним кулачковым контуром, связанным с по меньшей мере одним соединительным элементом так, что вращение вращающегося кулачкового элемента вызывает наложение по меньшей мере части скобок из узла наложения скобок. Тем самым можно использовать многоходовое выталкивание для разрезания ткани и наложения скобок.
Эти и другие цели и преимущества настоящего изобретения будут очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Прилагаемые чертежи, включенные в настоящее описание и составляющие его часть, иллюстрируют варианты настоящего изобретения и, вместе с общим описанием изобретения, приведенным выше, а также подробным описанием, приводимым ниже, служат для пояснения принципов настоящего изобретения.
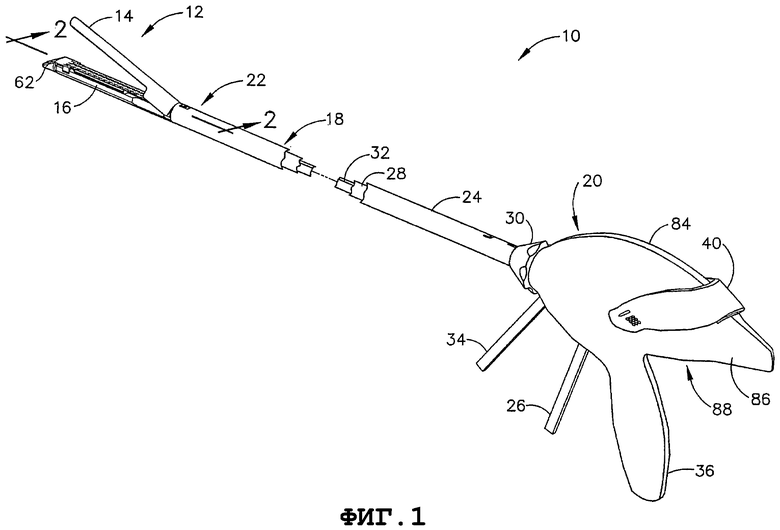
Фиг.1 - вид в перспективе хирургического инструмента для наложения скобок и разрезания, имеющий открытый концевой рабочий орган.
Фиг.2 - вид слева в сечении по линии 2-2 открытого концевого рабочего органа по фиг.1.
Фиг.3 - вид в перспективе открытого концевого эффектора по фиг.1.
Фиг.4 - разнесенный вид в перспективе исполнительной части хирургического инструмента по фиг.1.
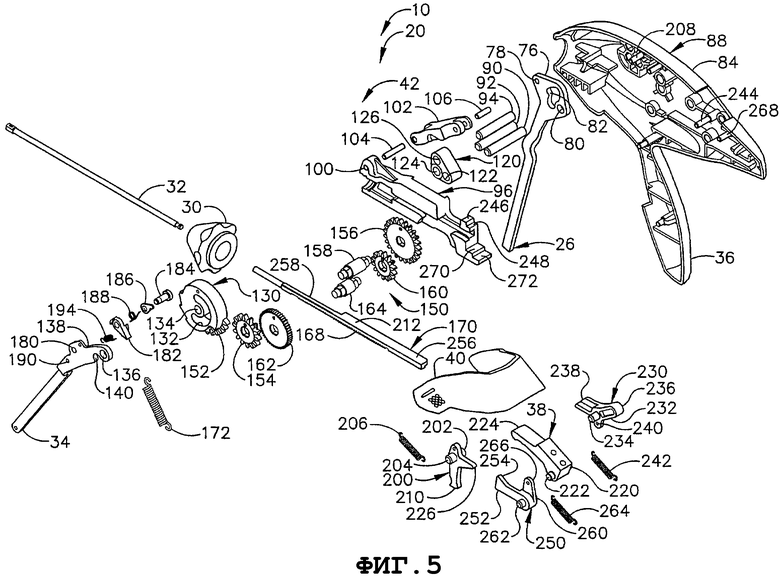
Фиг.5 - разнесенный вид в перспективе рукоятки хирургического инструмента по фиг.1.
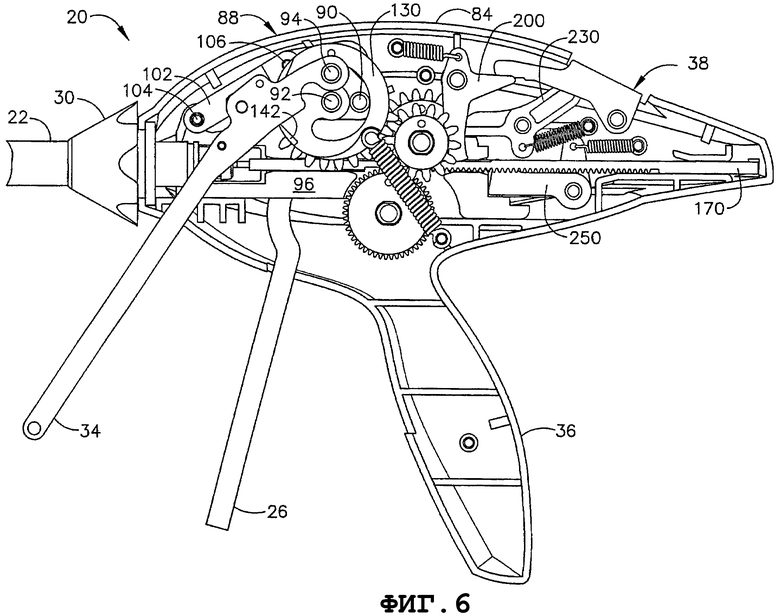
Фиг.6 - вид слева рукоятки хирургического инструмента по фиг.1 в открытом состоянии, где левая часть корпуса рукоятки не показана, чтобы показать механизм выталкивания, содержащий роторную передачу для многоходового срабатывания.
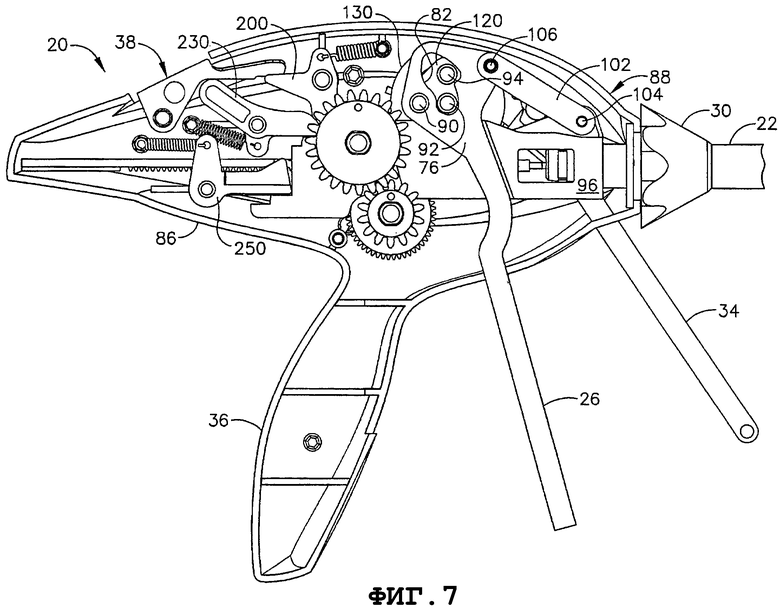
Фиг.7 - вид справа рукоятки по фиг.6 с удаленной правой частью корпуса, чтобы показать механизм закрывания и средства, предотвращающие обратный ход.
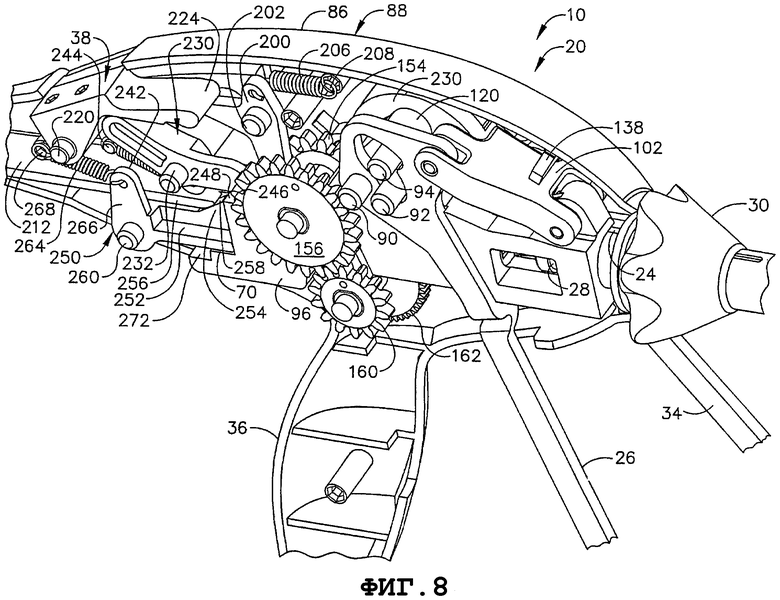
Фиг.8 - вид в перспективе сверху рукоятки по фиг.7.
Фиг.9 - вид сбоку рукоятки по фиг.6 с закрытым закрывающим курком и удаленным курком наложения скобок, чтобы показать ведущий клин выталкивания и кулачковые контуры на кулачковом диске.
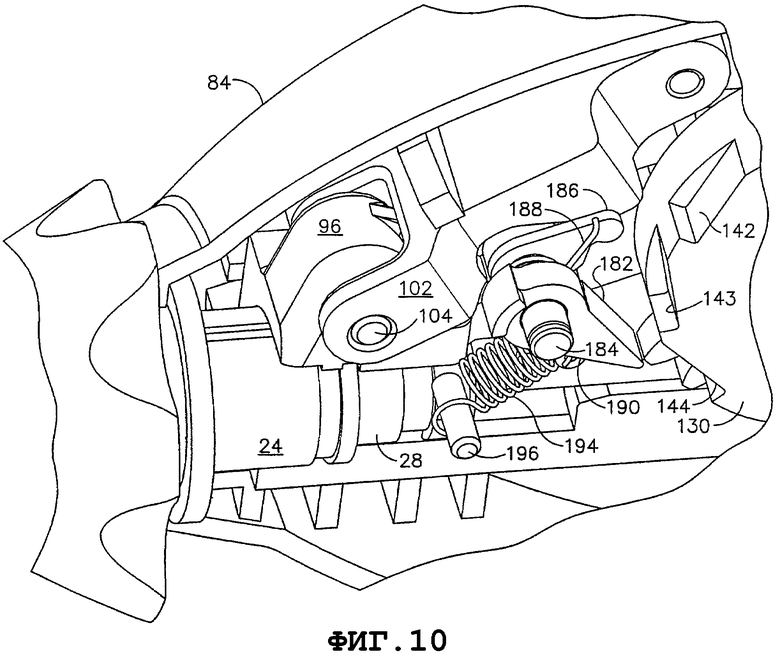
Фиг.10 - вид в перспективе сверху приводного клина срабатывания и кулачковых контуров по фиг.9.
Фиг.11 - вид в перспективе сзади механизма роторной передачи выталкивающего механизма рукоятки по фиг.1.
Фиг.12 - вид сбоку рукоятки по фиг.6 в закрытом и сработавшем состоянии, где опущена малая промежуточная шестерня выталкивающего механизма роторной передачи для показа маятника против обратного хода, контактирующего с зубчатой рейкой.
Подробное описание изобретения
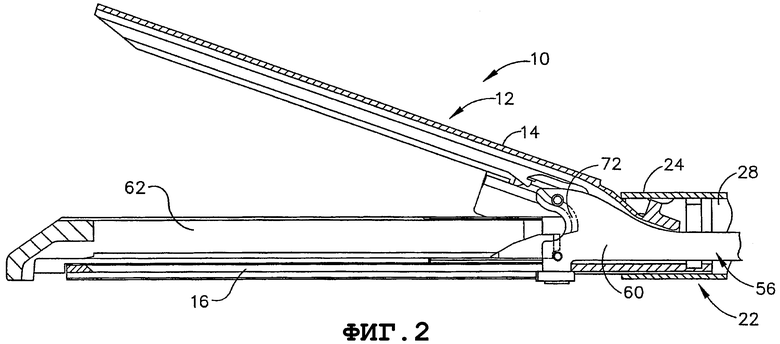
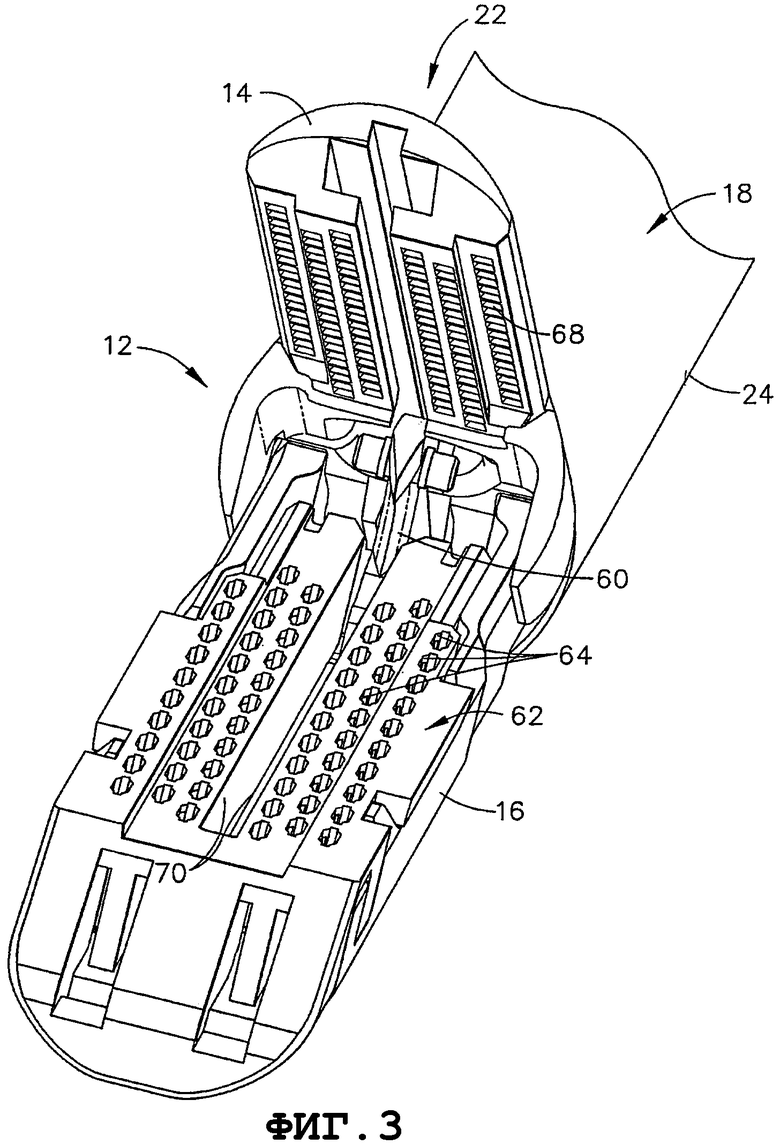
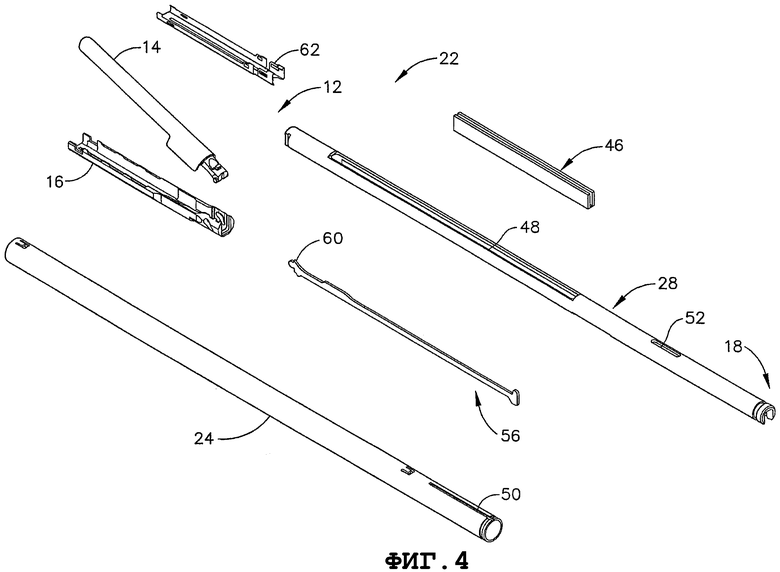
Возвращаясь к чертежам, где на всех видах одни и те же детали показаны одинаковыми позициями, на фиг.1-4 показан хирургический инструмент 10 для разрезания и наложения скобок, в котором реализовано уникальное преимущество настоящего изобретения. Хирургический инструмент 10 для разрезания и наложения скобок содержит концевой рабочий орган 12, имеющий матрицу 14, шарнирно прикрепленную к удлиненному каналу 16, образуя противолежащие губки для зажима ткани, которую следует разрезать и скрепить скобками. Концевой рабочий орган 12 соединен валом 18 с рукояткой 20. Исполнительная часть 22, образованная концевым рабочим органом 12 и валом 18, преимущественно имеет такие размеры, которые позволяют вставлять ее через троакар или небольшой лапароскопический разрез под управлением хирурга, который держит инструмент за рукоятку 20. Рукоятка 20 преимущественно содержит признаки, которые позволяют осуществлять отдельное движение закрывания концевого рабочего органа 12, не связанное с наложением скобки, а также осуществлять многократные ходы для выталкивания (т.е. разрезания и наложения скобок) концевого рабочего органа 12, одновременно показывая хирургу степень выталкивания.
Для этого между курком 26 для закрывания и матрицей 14 установлена закрывающая трубка 24 вала 18, обеспечивающая закрывание концевого рабочего органа 12. Внутри закрывающей трубки 24 с удлиненным каналом 16 и рукояткой 20 соединена рама 28 для продольного позиционирования и поддержки концевого рабочего органа 12. С рамой 28 соединена поворотная ручка 30, и оба элемента соединены с рукояткой 20 с возможностью вращения вокруг продольной оси вала 18. Таким образом, хирург может вращать концевой рабочий орган 12, поворачивая поворотную ручку 30. Закрывающая трубка 24 также вращается при вращении ручки 30, но сохраняет возможность продольного перемещения относительно нее, чтобы осуществить закрывание концевого рабочего органа 12. Внутри рамы 28 расположен выталкивающий шток 32, выполненный с возможностью продольного перемещения и соединенный с матрицей 14 концевого рабочего органа 12, и многоходовым курком 34 наложения скобок. Курок 26 закрывания расположен дистально относительно рукоятки 36 пистолетного типа, а курок 34 выталкивания расположен дистально относительно и рукоятки 36 пистолетного типа и курка 26 закрывания.
Во время эндоскопической операции, после того, как исполнительный участок 22 будет введен в пациента до места хирургического вмешательства, хирург обращается к эндоскопу или другому диагностическому визуализирующему прибору для размещения ткани между матрицей 14 и удлиненным каналом 16. Захватывая курок 26 закрывания и рукоятку 36 пистолетного типа, хирург может многократно захватывать и позиционировать ткань. После того, как хирург будет удовлетворен положением ткани относительно концевого рабочего органа 12 и количеством захваченной ткани, он нажимает на курок 26 закрывания полностью по направлению к рукоятке 36 пистолетного типа, зажимая ткань в концевом рабочем органе 12, и фиксирует курок 26 закрывания в этом зажатом (закрытом) положении. Если хирург не удовлетворен этим положением, он может отпустить курок 26 закрывания, нажав кнопку 38 освобождения (фиг.4), работа которой будет более полно описана ниже, и после этого повторить процедуру зажима ткани.
Если зажим осуществлен правильно, хирург может перейти к приведению в действие хирургического инструмента 10 для наложения скоб и разрезания. Более конкретно, хирург сжимает курок 34 выталкивания и рукоятку 36 пистолетного типа, нажимая на курок 34 заранее определенное количество раз. Количество необходимых рабочих ходов определяется в соответствии с эргономическими параметрами на основе максимального размера ладони, максимального усилия, передаваемого на инструмент при каждом рабочем ходе, и продольного расстояния и усилия, прилагаемого к инструменту во время каждого рабочего хода через выталкивающий шток 32 на концевой рабочий орган 12 во время выталкивания. Как будет показано ниже, разные хирурги могут предпочитать нажимать курок 34 выталкивания на разные угловые расстояния и, тем самым, увеличивать или уменьшать количество рабочих ходов.
Как показано на фиг.1, после срабатывания хирургического инструмента 10 для наложения скоб и разрезания, приводится в действие рычаг 40 высвобождения из закрытого состояния для отвода выталкивающего механизма назад. При нажатии на рычаг 40 высвобождения из закрытого состояния происходит выведение из зацепления выталкивающего механизма 42 вращающейся трансмиссии в рукоятке 20, позволяя пружине 172 отвести шток 32 от концевого рабочего органа 12.
Исполнительная часть, содержащая Е-образный концевой рабочий орган.
Преимущества рукоятки 20, способной создавать многоходовое движение срабатывания применяются в различных инструментах, и один такой концевой рабочий орган показан на фиг.1-4. Матрица 14 рабочего органа 12 реагирует на движение закрывания, передаваемое от рукоятки 20 в продольном направлении и дистально закрывающей трубкой 24. Удлиненный канал 16 находится в контакте с возможностью скольжения с перемещающейся и смыкающейся матрицей 14, образуя противолежащие губки, которые находятся в контакте с рамой 28, образуя жесткое крепление с рукояткой 20. Закрывающая трубка 24 находится в контакте с матрицей 14 дистально относительно шарнирного соединения между матрицей 14 и удлиненным каналом 16. Таким образом, дистальное движение закрывающей трубки 24 относительно рамы 28 приводит к закрыванию, а проксимальное движение относительно рамы 28 приводит к открыванию концевого рабочего органа.
Как показано на фиг.4, исполнительная часть 22 также содержит компоненты, которые реагируют на выталкивающее движение рукоятки 20, более конкретно, штока 32 (не показанного на фиг.4), который передает продольное движение между выталкивающим механизмом 42 в рукоятке 20, и исполнительной частью 22. В частности, выталкивающий шток 32 (на фиг.5 показан в разобранном состоянии) сопряжен с возможностью вращения с желобчатым элементом 46, который установлен с возможностью скольжения в продольном пазе 48 рамы 28. Желобчатый элемент 46 перемещается продольно внутри рамы 28 непосредственно в ответ на продольное перемещение выталкивающего штока 32. Продольный паз 50 в закрывающей трубке 24 оперативно соединяет трубку с поворотной ручкой 30 (не показана) для зацепления с рамой 28 через выполненный в ней небольшую продольную прорезь 52 для осуществления вращения. Длина продольного паза 50 в закрывающей трубке 24 достаточно велика, чтобы обеспечить возможность относительного продольного перемещения вместе с поворотной ручкой 30 для осуществления движений закрывания, соответственно.
Дистальный конец желобчатого элемента 46 рамы прикреплен к проксимальному концу выталкивающего стержня 56, который движется вместе с рамой 28, чтобы дистально ввести Е-образный участок 60 в концевой рабочий орган. Концевой рабочий орган 12 содержит обойму 62 скобок, которая приводится в действие Е-образным участком 60, который выводит скобки из отверстий 64 обоймы 62 в контакт с формирующими канавками 68 матрицы 14, придавая скобкам В-образную форму. Как показано на фиг. 3, корпус 86 обоймы скобок далее содержит проксимально открытый вертикальный паз 70 для прохода вертикально ориентированной режущей поверхности, размещенной вдоль дистального конца Е-образного участка 60 для прорезания соединяемой скобками ткани.
Иллюстративный концевой рабочий орган 12 более подробно описан в пяти рассматриваемых параллельно заявках на патент США того же владельца, содержание которых полностью включено в настоящее описание путем отсылки: (1) SURGICAL STAPLING INSTRUMENT HAVING A SINGLE LOCKOUT MECHANISM FOR PREVENTION OF FIRING, No. 10/441,424, Frederic E. Shelton, Mike Setser,Bruce Weisenburgh, поданная 20 июня 2003 г.; (2) SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, № 10/441,632, Frederic E. Shelton, Mike Setser, Brian J. Hemmelgarn, поданная 20 июня 2003 г.; (3) SURGICAL STAPLING INSTRUMENT HAVING A SPENT CARTRIDGE LOCKOUT, No. 10/441,565, Frederic E. Shelton, Mike Setser,Bruce Weisenburgh, поданная 20 июня 2003 г.; (4) SURGICAL STAPLING INSTRUMENT HAVING A FIRING LOCKOUT FOR AN UNCLOSED ANVIL, No. 10/441.590, Frederic E. Shelton, Mike Setser,Bruce Weisenburgh, поданная 20 июня 2003 г.; (5) SURGICAL STAPLING INSTRUMENT INCORPORATING AN E-BEAM FIRING MECHANISM, No. 10/443.617, Frederic E. Shelton, Mike Setser,Bruce Weisenburgh, поданная 20 июня 2003 г.
Следует понимать, что хотя в настоящем описании показан вал 18, не установленный на шарнирах, устройства по настоящему изобретению могут содержать инструменты, выполненные с возможностью поворота на шарнирах, как описано в пяти параллельных заявках на патент США, содержание которых полностью включено в настоящее описание путем отсылки: (1) SURGICAL INSTRUMENT INCORPORATING AN ARTICULATION MECHANISM HAVING ROTATION ABOUT THE LONGITUDINAL AXIS, No. 10/615,973, Frederic E. Shelton, Brian J. Hemmelgarn, Jeff Swayze, Kenneth S. Wales поданная 9 июля 2003 г, (2) SURGICAL STAPLING INSTRUMENT INCORPORATING AN ARTICULATION JOINT FOR A FIRING BAR TRACK No. 10/615,962, Brian J. Hemmelgarn, поданная 9 июля 2003 г., (3)A SURGICAL INSTRUMENT WITH A LATERAL-MOVING ARTICULATION CONTROL No. 10/615,972, Jeff Swayze, поданная 9 июля 2003 г., (4) SURGICAL STAPLING INSTRUMENT INCORPORATING A TAPERED FIRING BAR FOR INCREASED FLEXIBILITY AROUND THE ARTICULATION JOINT No. 10/615,974, Frederic E. Shelton, Mike Setser,Bruce Weisenburgh, поданная 9 июля 2003 г., (5) SURGICAL STAPLING INSTRUMENT HAVING ARTICULATION JOINT SUPPORT PLATES FOR SUPPORTING A FIRING BAR No. 10/615,971, Jeff Swayze, Joseph Charles Hueil, поданная 9 июля 2003 г.
Рукоятка для многоходового срабатывания
На фиг.5-8 показана рукоятка 20, которая реагирует на перемещение курка 26 для закрывания и курка 34 выталкивания для генерирования соответственно движения закрывания и движения выталкивания при наложении скобок на исполнительной части 22. Что касается движения закрывания, курок 26 закрывания содержит верхний участок 76, который содержит три поперечных отверстия - расположенное спереди отверстие 78 для пальца, нижнее заднее отверстие 80 шарнира и центральный вырез 82. Три стержня ориентированы поперечно и соединены с правой и левой половинами 84, 86 корпуса 88 рукоятки (при этом правая половина 84 показана на фиг.5-6, а левая половина 86 показана на фиг.7). В частности, задний стержень 90 проходит сквозь заднее отверстие 80 верхнего участка 76 курка 26 закрывания и, благодаря этому, курок 26 закрывания поворачивается вокруг заднего стержня 90. Передний стержень 92, который расположен дистально относительно стержня 90, и верхний стержень 94, который расположен над стержнем 92, проходят сквозь центральный вырез 82, который имеет такую конфигурацию, чтобы ограничивать движение курка 26 закрывания путем контакта с передним и верхним стержнями 92, 94 в каждом из крайних положений хода курка. Таким образом, центральный вырез 86 содержит вертикальный участок, нижняя поверхность которого контактирует с передним стержнем 92, когда курок 26 закрывания расположен впереди (дистально), и содержит верхний проксимально наклонный участок, верхняя и передняя поверхность которого контактирует с верхним пальцем 94, соответственно, когда курок 26 закрывания находится в переднем, отпущенном положении и в проксимальном нажатом положении.
Закрывающая обойма 96, которая сопряжена с закрывающей трубкой 24, расположена продольно и с возможностью скольжения в корпусе 88 рукоятки и своим дистальным концом входит в контакт с проксимальным концом закрывающей трубки 24, тем самым передавая продольное движение закрывания на закрывающую трубку 24 и, следовательно, на матрицу 14 для закрывания концевого рабочего органа 12. Это зацепление допускает вращение закрывающей трубки 24, когда закрывающая обойма 96 не вращается. Над этим зацеплением поперечное отверстие 100 соединено с закрывающей тягой 102 передним пальцем 104, а другой конец закрывающей тяги 102 соединен с отверстием 78 курка 26 закрывания задним пальцем 106.
Треугольная проставка 120 содержит отверстия 122, 124, 126 для приема стержней 90, 92, 94 соответственно и зажата между кулачковым диском 130 и верхним участком 76 курка 26 закрывания. Кулачковый диск 130 вращается вокруг переднего стержня 92 и содержит полукруглый паз 132, в который проходят задний и верхний стержни 90, 94. В центральном отверстии 134 проходит передний стержень 92. Слева от кулачкового диска 130 верхний стержень 94 входит в отверстие 136 на верхнем конце 138 курка 34 для выталкивания скобок. Курок 34 выталкивания установлен с возможностью поворота на стержне 94 так, чтобы кулачковый диск 130 был расположен между треугольной проставкой 120 и курком 34 выталкивания. Дистально открытый паз 140 в курке 34 выталкивания скобок под отверстием 136 для стержня совмещается для приема переднего стержня 92, позволяя курку 34 перемещаться в дистальном направлении во время наложения скобок. Приведение в действие курка 26 закрывания приводит к повороту кулачковой тяги 102 вниз в контакт с пальцем 184 приводного клина, проходящего внутрь от курка 34 выталкивания скобок, заставляя курок 34 выталкивания скобок частично отходить в дистальном направлении и устанавливая курок 34 выталкивания скобок в положение для захвата.
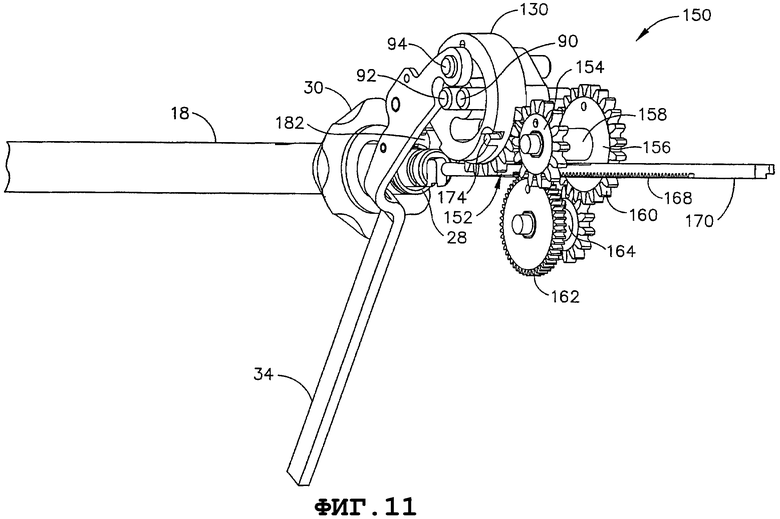
Как показано на фиг.5, 9 и 10, кулачковый диск 130 имеет последовательность кулачковых контуров 142-144 (фиг.9) на переднем участке (в показанном положении до срабатывания), более конкретно, на его левой стороне, которые соответственно зацепляются с курком 34 выталкивания скобок для передачи вращения сверху вперед (против часовой стрелки, если смотреть слева) кулачковому диску 130. Это вращение передается через зубчатую передачу 150 (фиг.5 и 11) механизма 42 роторной передачи выталкивающего механизма 42, начиная с зубчатой части 152 на нижней части правой стороны кулачкового диска 130, которая зацепляется с малой промежуточной шестерней 154, которая, таким образом, вращается сверху назад (по часовой стрелке) с увеличенной скоростью вращения относительно кулачкового диска 130. Большая промежуточная шестерня 156 соединена холостым валом 158 с малой промежуточной шестерней 154 и поэтому вращается в том же направлении и с той же скоростью. Вторая малая шестерня 160 зацепляется с большой промежуточной шестерней 156 и поэтому вращается сверху вперед (против часовой стрелки, если смотреть слева) с более высокой скоростью. Мелкозубая большая шестерня 162 соединена вторым валом 164 со второй малой шестерней 160 и поэтому вращается в том же направлении и с той же скоростью, что и вторая малая шестерня 160. Таким образом, передача 150 усиливает движение кулачкового диска 130 за счет двойного шестеренчатого редуктора для создания дополнительного продольного движения выталкивания. Мелкозубая шестерня 162 зацеплена с зубчатым участком 168 на нижней стороне зубчатой рейки 170, дистальный конец которой находится в контакте с проксимальным концом выталкивающего штока 32. Дистальный конец зубчатой рейки 170 продольно и с возможностью скольжения вставлен в закрывающую обойму 96, а ее проксимальный конец продольно и с возможностью скольжения вставлен между правой и левой половинами 84, 86 корпуса 88 рукоятки.
Селективное зацепление курка 34 выталкивания скобок с кулачковыми контурами 142-144 обеспечивает дальнейшее продольное перемещение, позволяя осуществлять многократные ходы курка 34 выталкивания скобок. Для подготовки зубчатой передачи 150 к наложению скобок кулачковый диск отводится по часовой стрелке в положение, при котором отсутствует выталкивание, возвратной пружиной 172, прикрепленной к выступающему налево интегральному пальцу 174, сформированному в кольцевом углублении 176 в нижней проксимальной части кулачкового диска 130 (фиг.9 и 10). Другой конец возвратной пружины 172 зубчатой передачи прикреплен к пальцу 178, выполненному заодно с корпусом 88 рукоятки. Нажатие на курок 34 выталкивания скобок приводит к вращению кулачкового диска 130 против часовой стрелки для растяжения возвратной пружины 172. Продолжение нажатия на курок 34 выталкивания скобок приводит к оборачиванию растянутой возвратной пружины 172 вокруг наружного диаметра кулачкового диска 130, по мере того, как он вращается, и в кольцевое углубление 186 (не показана).
Как показано на фиг.5, 9, 11, ниже и дистально относительно верхнего конца 128 курка 34 выталкивания скобок находится отверстие 180 под палец ведущего клина и проксимальное отверстие 190 под палец. Палец 184 ведущего клина и палец 196 проходят внутрь от отверстий 180 и 190 (соответственно) в курке 34 выталкивания скобок. Ведущий клин 182 и отклоняющий палец 186 шарнирно установлены на пальце 184 приводного клина и оперативно соединены пружиной 188 относящейся к типу, применяемому в мышеловках. Противоположная натяжная пружина 194 между приводным клином 182 и пальцем 196 поворачивает приводной клин 182, отклоняющий палец 186 и пружину 188 по часовой стрелке (фиг.10). Когда курок 34 выталкивания нажимают (фиг.9), отклоняющий палец 186 входит в контакт с центральной, не имеющей кулачковых контуров поверхностью кулачкового диска 130, поворачивая отклоняющий палец 186, пружину 188 и приводной клин 182 против часовой стрелки. Это движение против часовой стрелки отклоняющего пальца 186 смещает приводной клин 182 в рабочее зацепление с кулачковыми контурами 142-144 (фиг.9).
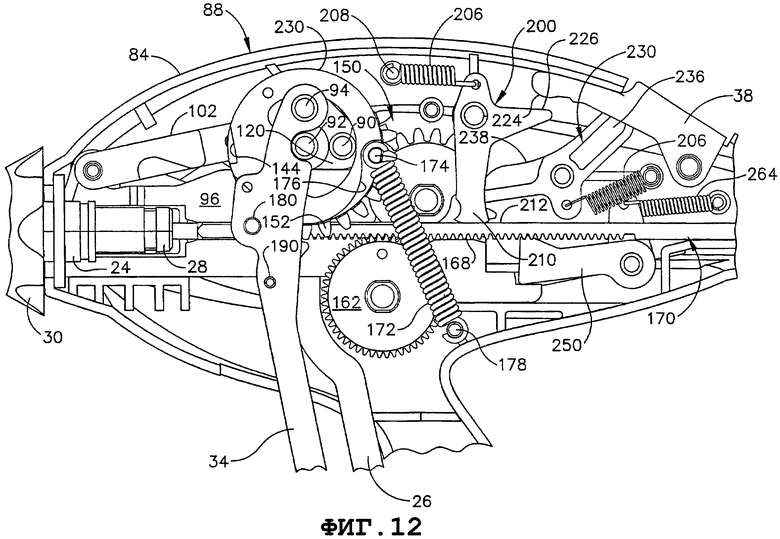
Как показано на фиг.12, когда ведущий клин 182 отведен от одного из кулачковых контуров 142-144 между ходами наложения скобки, кулачковый диск 130 стремится повернуться сверху назад под действием возвратной пружины 172, но до действия рычага 200 против обратного хода. Поперечные пальцы 202, 204 маятника 200 против обратного хода зацеплены с соответствующими правой и левой половинами 84, 86 корпуса 88 рукоятки. Над пальцами 202, 204 натяжная пружина 206 против обратного хода прикреплена к выполненному заодно с правой половиной корпуса 88 пальцу 208, расположенному дистально относительно маятника 200 против обратного хода. Как показано на фиг.5, нижняя лапка 210 маятника 200 против обратного хода входит во фрикционный контакт с верхней поверхностью 212 жесткой зубчатой рейки 170. Когда нижняя лапка 210 маятника против обратного хода отводится проксимально откатывающейся рейкой 170, маятник 200 против обратного хода приближается к перпендикулярному зацеплению рейкой 170, что увеличивает фрикционную силу, запирая рейку 170, что достаточно, чтобы преодолеть отводящее усилие, создаваемое возвратной пружиной 172 передачи. Когда рейка 170 приводится в движение в дистальном направлении курком 34 выталкивания, нижняя лапка 210 выталкивается в дистальном направлении, уменьшая трение и обеспечивая возможность рабочего хода. Чрезмерное движение вперед нижней лапки 210 предотвращается холостой осью 158 и усилием натяжной пружины 206 против обратного хода.
На фиг.12 показана высвобождающая кнопка 38, повернутая вверх вокруг задних поворотных осей 220, 222, поднимая свой дистальный рычаг 224 над направленным проксимально рычагом 226 маятника 200 против обратного хода, обеспечивая возможность дистального перемещения нижней лапки 210 для фиксации зубчатой рейки 170 между рабочими ходами. Зажимной запирающий рычаг 230 качается вокруг поперечных поворотных осей 232, 234 для осуществления этого поднятия высвобождающей кнопки 38. В частности, проходящий проксимально и вверх рычаг 236 зажимного запирающего рычага 230 упирается со скольжением в нижнюю поверхность дистального рычага 224 высвобождающей кнопки 38. Дистально направленный запирающий рычаг 238 зажимного запирающего рычага 230 запирает закрывающую обойму 96 в ее закрытом положении. В частности, язычок 240 отходит вниз между направленным проксимально и вверх рычагом 236 и выступающим дистально запирающим рычагом 238 и отводится в проксимальном направлении пружиной 242, которая также прикреплена к правой половине 84 корпуса 88 с помощью пальца 244. Как показано на фиг.6-7, выступающий дистально запирающий рычаг 238 лежит на уступе 246, выполненном на верхнем, проксимальном участке закрывающей обоймы 96, позволяя закрывающей обойме 96 перемещаться дистально, передавая движение закрывания. Зажимная канавка 248, которая является открытой дистально и вверх выемкой в уступе 246, принимает дистально направленный запирающий рычаг 238, когда закрывающая обойма 96 достигает своего дистального рабочего положения (фиг.8, 9). Таким образом, хирург может отпустить курок 26 выталкивания и концевой рабочий орган 12 останется сжатым.
Как показано на фиг.5-8, 12, помимо описанного выше устройства против обратного хода и устройства фиксации зажима, имеется устройство блокировки выталкивания, представленное блокирующим рычагом 250. В хирургическом инструменте 10 для наложения скобок и разрезания в его исходном открытом состоянии блокирующий рычаг 250 реагирует на отвод закрывающей обоймы 96, блокируя дистальное рабочее движение жесткой зубчатой рейки 170, как показано, в частности, на фиг.7 и 8. Блокирующий рычаг 250 содержит дистально выступающий рычаг 252, имеющий дистально наклонную верхнюю поверхность 254, которая совмещена с правой кромкой 256 вдоль проксимального участка жесткой зубчатой рейки 170. Имеющая паз правая кромка 258 вдоль остального дистального участка жесткой зубчатой рейки 170 позволяет дистально наклонной верхней поверхности 254 блокирующего рычага 250 поворачиваться вверх вокруг своих проксимальных поперечных осей 260, 262 под воздействием пружины 264, соединенной с вертикальным язычком 266, который перпендикулярно и проксимально прикреплен к дистально проходящему рычагу 252. Другой конец пружины 264 соединен с пальцем 268, выполненным заодно с правой половиной 84 корпуса 88 за вертикальным язычком 266.
Как показано на фиг.8, дистально наклонная поверхность 254 блокирует дистальное движение рейки 170 за счет расклинивания вверх уступом 270, выполненным поперек проксимального конца закрывающей обоймы 96, и открытого проксимально и вверх для приема качающегося вниз и направленного дистально рычага 252 блокирующего рычага 250. Когда закрывающая обойма 96 сдвинута дистально для закрывания концевого рабочего органа 12, как показано на фиг.12, правая кромка 256 рейки 170 может проходить над дистально наклонной поверхностью 254, которая реагирует на это, перемещая направленный дистально рычаг 252 вниз для зацепления с нижним уступом 272, выполненным на закрывающей обоймой 96 проксимально относительно расположенного выше и более дистально уступа 270. Зацепление блокирующего рычага 250 с нижним уступом 272 позволяет предотвратить отвод (движение в проксимальном направлении) закрывающей обоймой 96 до тех пор, пока рейка 170 на будет полностью отведена. Таким образом, инициируя отвод выталкивающего механизма 42 преимущественно возникает до того, как концевой рабочий орган разожмется, поскольку в ином случае могло бы возникнуть заклинивание выталкивающего механизма 42. Более того, между нижним уступом 272 и блокирующим рычагом 250 может существовать достаточный фрикционный контакт, чтобы преимущественно возвращать хирургический инструмент 10 для наложения скобок и разрезания в открытое и отведенное положение посредством двухступенчатой процедуры. В частности, после того, как выталкивающий механизм 42 отведен путем нажатия высвобождающей кнопки 38, небольшое нажатие на курок 26 закрывания позволит блокирующему рычагу 250 подняться в блокирующее положение. После этого отпускание курка 26 закрывания можно продолжить, а блокирующий рычаг 250 будет выставлен для взаимодействия с более высоким уступом 270, когда закрывающая обойма 96 будет полностью отведена и, тем самым, концевой рабочий орган 12 будет открыт.
Следует далее отметить, что жесткая зубчатая рейка 170 может быть преимущественно выполнена из звеньев, которые позволят части, проксимальной относительно приводного механизма 42, быть искривленной в рукоятке, что позволит создать более компактную конструкцию. Такая составленная из звеньев рейка более подробно описана в заявке того же владельца SURGICAL STAPLING INSTRUMENT INCORPORATING A FIRING MECHANISM HAVING A LINKED RACK TRANSMISSION, No. 10/673,930 Jeffrey S. Swayze, Frederic E. Shelton IV, поданной 29 сентября 2003 года, которая полностью включена в настоящее описание путем ссылки.
При использовании хирург вводит концевой рабочий орган 12 и вал 18 сквозь канюлю троакара к месту хирургического воздействия, позиционирует матрицу 14 и удлиненный канал 16 как противолежащие губки для захвата соединяемой скобками и разрезаемой ткани. После того, как концевой рабочий орган будет правильно позиционирован, курок 26 закрывания полностью прижимают в направлении рукоятки 36 пистолетного типа, в результате чего закрывающая тяга 102 подает закрывающую обойму 96 и, тем самым, закрывающую трубку 24 для закрывания концевого рабочего органа 12. На движущейся в дистальном направлении закрывающейся обоймы 96 имеется фиксирующий паз 248, в который входит запирающий рычаг 230, зажимая концевой рабочий орган 12. Многократное нажатие на курок 34 выталкивания приводит к срабатыванию выталкивающего штока 32 за счет последовательного взаимодействия приводного клина 182, который соединен с курком 34 выталкивания скобок, с кулачковыми контурами 142-144 на кулачковом диске 130. Такое храповое вращение передается через механизм 150 роторной передачи для подачи в дистальном направлении зубчатой рейки 170. При поданной вперед закрывающей обойме 96 зубчатая рейка 170 имеет возможность отжать блокирующий рычаг 250 со своего пути. Между рабочими ходами маятник 200 против обратного хода входит во фрикционный контакт с зубчатой рейкой 170, противодействуя отводящему усилию, прилагаемому возвратной пружиной 172 зубчатой передачи, соединенной с кулачковым диском 130. После выполнения полного хода наложения скобок нажатие на рычаг 40 освобождения смыкании сначала выводит из зацепления маятник 200 против обратного хода, позволяя рейке 170 вернуться на место, а затем выводит из зацепления запирающий рычаг 230, выводя его из закрывающей обоймы 96, чтобы позволить блокирующему рычагу 250 выйти из закрывающей обоймы, и освобождает курок 26 закрывания, позволяя закрывающей обойме 96 сдвинуться в проксимальном направлении в положение, в котором она удерживает блокирующий рычаг 250, чтобы заблокировать зубчатую рейку 170 от срабатывания. После этого исполнительный участок 22 хирургического инструмента 10 для наложения скобок и разрезания можно извлечь, например, для замены обоймы 62 скобок в подготовке к другой операции.
Хотя настоящее изобретение было показано, проиллюстрировано путем описания нескольких вариантов и хотя иллюстративные варианты были описаны достаточно подробно, в намерения заявителя не входит какое-либо ограничение объема прилагаемой формулы до таких деталей. Дополнительные преимущества и модификации легко понятны специалистам.
Следует понимать, что термины «проксимальный» и «дистальный» применяются в описании в отношении врача, захватывающего рукоятку инструмента. Так, концевой рабочий орган 12 является дистальным относительно более проксимальной рукоятки 20. Далее, следует понимать, что для удобства и ясности, пространственные термины, такие как «вертикальный» и «горизонтальный» используются в описании в отношении чертежей. Однако хирургические инструменты используются в различных ориентациях, и эти термины не являются ограничивающими или абсолютными.
Настоящее изобретение было описано в применении к эндоскопическим процедурам и устройству. Однако использование в описании термина «эндоскопический» не должно толковаться как ограничивающее настоящее изобретение лишь хирургическим инструментом для наложения скобок и разрезания, только в сочетании с эндоскопической трубкой (т.е. троакаром). Наоборот, считается, что настоящее изобретение может найти применение в любой процедуре, где доступ ограничен небольшим разрезом, включая, помимо прочего, лапароскопические процедуры, а также процедуры с открытым доступом.
Например, хотя описанный инструмент 10 для наложения скобок и разрезания показан имеющим два отдельных привода для закрывания и наложения скобок, следует понимать, что варианты настоящего изобретения могут включать рукоятку, которая преобразует движение единственного приводного элемента в движение, которое закрывает и приводит к срабатыванию инструмента.
Кроме того, несмотря на то что показана рукоятка, приводимая в действие вручную, моторизованная или иным образом механизированная рукоятка может быть улучшена за счет встраивания зубчатой рейки, состоящей из звеньев, как описано выше, что позволит сократить размеры рукоятки и получить другие преимущества. Например, хотя удобно частично хранить рейку, состоящую из звеньев, в рукоятке пистолетного типа, следует понимать, что шарнирные соединения между звеньями позволяют хранить рейку параллельно прямому участку, определенному валом и барабаном рукоятки.

Изобретение относится к медицине и может быть использовано для наложения скобок и разрезания тканей при выполнении эндоскопических процедур. Хирургический инструмент, содержит концевой рабочий орган, который сконфигурирован для реагирования на движение выталкивания; вал, который прикреплен к концевому рабочему органу и рукоятку. Рукоятка создает отдельные движения закрывания и выталкивания для приведения в действие концевого рабочего органа, в частности многократные ходы выталкивания для уменьшения усилия, требующегося для наложения скобки и разрезания концевым рабочим органом. В результате инструмент обеспечивает достижение требуемой длины разрезания и сшивания с желательным соотношением длины хода выталкивания и продольного движения наложения скобки. 3 н. и 20 з.п. ф-лы, 12 ил.
1. Хирургический инструмент, содержащий:
концевой рабочий орган, сконфигурированный для реагирования на движение выталкивания;
вал, прикрепленный к концевому рабочему органу и содержащий удлиненный выталкивающий элемент, соединенный с концевым рабочим органом для движения, для продольной передачи движения выталкивания; и
рукоятку проксимально прикрепленную к валу, содержащую:
кулачковый диск, содержащий множество кулачковых контуров вокруг по меньшей мере части окружности;
привод выталкивания, выполненный с возможностью совершения повторяющихся движений в направлении выталкивания и в обратном направлении;
клин, соединенный с приводом выталкивания и оперативно сконфигурированный для последовательного зацепления с соответствующим одним из множества кулачковых контуров кулачкового диска во время каждого движения привода выталкивания в направлении выталкивания;
зубчатую рейку, соединенную с приводным элементом вала и соединенную зубчатым зацеплением с кулачковым диском для передачи прерывистого вращения кулачкового диска как продольного движения выталкивания.
2. Инструмент по п.1, где зубчатая рейка соединена зубчатым зацеплением с кулачковым диском, содержащим зубчатую передачу.
3. Инструмент по п.2, где зубчатая передача содержит узел редуктора, преобразующий прерывистое вращение кулачкового диска в увеличенное продольное движение зубчатой рейки.
4. Инструмент по п.1, далее содержащий механизм против обратного хода, оперативно сконфигурированный для предотвращения отката рейки между ходами курка выталкивания.
5. Инструмент по п.1, где концевой рабочий орган содержит пару противолежащих губок, реагирующих на движение закрывания, и выталкивающий стержень, реагирующий на выталкивающий элемент выталкивания, при этом вал оперативно сконфигурирован для передачи движения закрывания через закрывающий элемент на концевой рабочий орган, при этом рукоятка далее содержит механизм закрывания, оперативно сконфигурированный для создания движения закрывания.
6. Инструмент по п.5, далее содержащий механизм блокировки выталкивания, реагирующий на размыкание механизма закрывания для предотвращения перемещения рейки.
7. Инструмент по п.6, где механизм блокировки выталкивания оперативно сконфигурирован для реагирования на по меньшей мере частичное выталкивание зубчатой рейки для блокировки открывания механизма закрывания.
8. Инструмент по п.7, где рукоятка далее содержит блокирующий зажим, реагирующий на закрывание механизма закрывания для блокировки механизма закрывания.
9. Инструмент по п.5, где рукоятка далее содержит:
механизм блокировки выталкивания, реагирующий на размыкание механизма закрывания для предотвращения движения зубчатой рейки и реагирующий на по меньшей мере частичное выталкивание рейки для предотвращения размыкания механизма закрывания;
механизм блокирующего зажима, реагирующий на движение закрывания механизма закрывания для блокировки механизма закрывания;
механизм против обратного движения, оперативно сконфигурированный для предотвращения отката рейки между ходами выталкивания курка выталкивания, и
высвобождающий механизм, оперативно сконфигурированный для разблокирования механизма против обратного хода.
10. Инструмент по п.9, где высвобождающий механизм далее оперативно сконфигурирован для разблокирования механизма блокирующего зажима.
11. Инструмент по п.5, где концевой рабочий орган оперативно сконфигурирован для наложения скобок и разрезания ткани при выталкивании.
12. Инструмент по п.1, где рукоятка далее содержит рукоятку пистолетного типа, а зубчатая рейка содержит гнущуюся рейку, выполненную с возможностью укладки в рукоятку пистолетного типа при отводе.
13. Хирургический инструмент, содержащий:
рукоятку;
узел наложения скобок, размещенный дистально относительно рукоятки и содержащий:
множество скобок, и
матрицу, имеющую поверхность, придающая скобкам форму и выполненную с возможностью перевода из открытого положения, отстоящего от множества скобок в сомкнутое положение, примыкающее к множеству скобок; и
механизм наложения скобок, оперативно соединенный с узлом наложения скобок, содержащий:
вращающийся кулачковый элемент, имеющий по меньшей мере один кулачковый контур, и
по меньшей мере один соединительный элемент, оперативно связанный с вращающимся кулачковым элементом и узлом наложения скобок так, что вращение вращающегося кулачкового элемента приводит к наложению по меньшей мере части скобок из узла наложения скобок.
14. Инструмент по п.13, где соединительный элемент содержит зубчатую рейку.
15. Инструмент по п.13, далее содержащий по меньшей мере один приводной элемент, выполненный с возможностью оперативного зацепления с по меньшей мере одним кулачковым контуром вращающегося кулачкового элемента для вращения вращающегося кулачкового элемента и для выталкивания по меньшей мере части из множества скобок.
16. Инструмент по п.15, далее содержащий элемент выталкивания, оперативно соединенный с по меньшей мере одним приводным элементом так, что приведение в действие элемента выталкивания приводит к выталкиванию по меньшей мере части скобок.
17. Инструмент по п.16, где многократное приведение в действие элемента выталкивания приводит к наложению всего множества скобок из узла наложения скобок.
18. Хирургический инструмент по п.16, где приводной элемент оперативно соединен со смещающим элементом, при этом смещающий элемент смещает приводной элемент в зацепление с вращающимся кулачком при приведении в действие элемента приведения в действие.
19. Инструмент по п.18, где приводной элемент оперативно соединен со смещающим элементом посредством элемента пружины, при этом элемент пружины перемещает приводной элемент в ответ на движение элемента приведения в действие.
20. Инструмент по п.18, где приводной элемент оперативно соединен со смещающим элементом пружиной, при этом пружина перемещает элемент клина в оперативное зацепление с по меньшей мере одним кулачковым контуром в ответ на приведение в действие элемента приведения в действие.
21. Хирургический инструмент, содержащий:
концевой рабочий орган, оперативно сконфигурированный для реагирования на движение выталкивания;
вал, прикрепленный к концевому рабочему органу и содержащий удлиненный элемент выталкивания, соединенный с концевым рабочим органом для движения, для продольной передачи перемещения выталкивания; и
рукоятку, проксимально прикрепленную к валу, содержащую:
привод выталкивания, выполненный с возможностью выполнения повторяющихся движений в направлении выталкивания и в обратном направлении;
зубчатую рейку, соединенную с элементом выталкивания вала, и средство для ротационной связи повторяющихся движений в направлении выталкивания от привода выталкивания и зубчатой рейки и для удержания текущего положения зубчатой рейки во время движения привода выталкивания в обратном направлении.
22. Инструмент по п.21, где концевой рабочий орган далее содержит устройство для наложения скобок и разрезания, реагирующее на движение выталкивания.
23. Инструмент по п.22, где устройство для наложения скобок и разрезания далее содержит пару противолежащих губок, реагирующих на движение закрывания, при этом рукоятка дополнительно содержит средство для закрывания пары противолежащих губок.
| US 6330965 В1, 18.12.2001 | |||
| US 4596350 А, 24.06.1986 | |||
| US 5326013 А, 05.07.1994 | |||
| Хирургический сшивающий аппарат | 1983 |
|
SU1183082A1 |
| US 5330502 А, 19.07.1994. | |||

