Изобретение относится к машиностроению, а именно к способам регулирования жесткости виброизолирующих устройств сидений для человека-оператора транспортных и самоходных технологических машин (ТТМ). Оно может быть использовано при создании компактных сидений для операторов тех ТТМ, где вибрационная защита в полосе инфранизких частот необходима, но неэффективна или невозможна с помощью известных аналогов. К ним относятся, прежде всего, тихоходные наземные неподрессоренные ТТМ (сельскохозяйственные, дорожно-строительные и т.п.), а также вертолеты. Также возможно применение предлагаемого изобретения в мини-ТТМ, в которых в настоящее время используются сиденья для операторов средних и тяжелых колесных и гусеничных ПМ. При условии автоматического управления процессом регулирования жесткости изобретение может применяться в подрессоренных ТТМ (автобусы, грузовики и т.д.), а также в пассажирских легковых внедорожных автомобилях с предельно малым рабочим пространством для размещения виброизолирующего устройства.
Известны способы регулирования жесткости виброизолирующего устройства, заключающиеся в смягчении его упругого элемента путем деформирования дополнительного упругого элемента в закритической области до получения эффекта "отрицательной" жесткости в направлении линейной координаты и последующего совместного деформирования обоих упругих элементов [1, 2].
Данные способы позволяют регулировать жесткость в пределах малых перемещений и соответственно смягчать упругий элемент виброизолирующего устройства для достижения известного качества вибрационной защиты.
Известный диапазон регулирования недостаточен для эффективной работы виброизолирующего устройства в ряде ТТМ и качественной вибрационной защиты человека-оператора в полосе инфранизких частот с учетом его динамических антропометрических характеристик. При этом процессы осуществления настройки дополнительного упругого элемента и его взаимодействия с упругим элементом трудоемки. Причем для расширения диапазона регулирования величины "отрицательной" жесткости дополнительного упругого элемента и соответственно величины перемещений, на которых возможно эффективное регулирование жесткости виброизолирующего устройства, требуется изменение начальных структурных и геометрических характеристик системы, в частности значительное увеличение пространства на рабочем месте человека-оператора, что неприемлемо в ряде наземных ТТМ, а также в вертолетах.
Наиболее близким по технической сущности и достигаемому результату является способ регулирования жесткости виброизолирующего устройства, принятый в качестве прототипа и заключающийся в смягчении упругого элемента виброизолирующего устройства путем деформирования дополнительного упругого элемента в закритической области по одной из координат до второй формы изгиба, его нагружения по другой координате до одной из критических точек исходной формы равновесия и последующего совместного деформирования обоих упругих элементов за критической точкой [3].
Способ дает возможность получения эффекта крутильной "отрицательной" жесткости дополнительного упругого элемента и соответственно регулирования жесткости виброизолирующего устройства в пределах больших перемещений. Это способствует достижению эффективной вибрационной защиты человека-оператора в полосе инфранизких частот с учетом его динамических антропометрических характеристик. Способ реализован в некоторых наземных ТТМ, а также в вертолетах.
Однако данный способ не позволяет осуществлять эффективное регулирование жесткости виброизолирующего устройства с учетом нелинейности характеристик его упругого элемента, возрастающей, в частности, по мере увеличения статической нагрузки. Способ недостаточно эффективен также потому, что процессы осуществления настройки дополнительного упругого элемента и его взаимодействия с упругим элементом трудоемки. При этом не учитываются многообразие структурных и конструктивных особенностей, а также весь диапазон минимальных значений жесткости упругого элемента.
Все это увеличивает трудоемкость настройки дополнительного упругого элемента, в частности, за счет частичного нагружения упругого элемента; ограничивает возможности регулирования для достижения оптимального соотношения между величиной жесткости виброизолирующего устройства и протяженностью участка перемещений, на котором регулирование эффективно во всем диапазоне изменения нормируемых параметров упругих характеристик системы; снижает качество вибрационной защиты человека-оператора, в частности, при больших статических нагрузках.
Известно виброизолирующее устройство, содержащее основание, упругий элемент, включающий упругие звенья и направляющий механизм, и дополнительный упругий элемент, включающий структурные (жесткие) и упругие звенья, подвижно взаимосвязанные между собой, в том числе профилированные сегменты, установленные на основании, одни из которых выполнены выпуклыми, а другие - вогнутыми, две пары контактных звеньев, подвижно закрепленных на основании и подрессоренных с помощью упругих звеньев, выполненных в виде торсионов, причем одна пара контактных звеньев снабжена роликами, взаимодействующими с выпуклыми поверхностями сегментов, при этом виброизолирующее устройство снабжено дополнительно фрикционными ползунами, установленными на второй паре контактных звеньев с переменным зазором относительно вогнутых сегментов [4].
В данном виброизолирующем устройстве силовая характеристика дополнительного упругого элемента определяется геометрической формой и радиальными размерами профилированных сегментов, а также жесткостью торсионов, обеспечивающих контакт роликов с поверхностью сегментов. Поэтому дополнительный упругий элемент имеет значительные габариты, а регулирование жесткости до необходимой величины возможно в пределах малых перемещений, что недостаточно для смягчения упругого элемента и достижения требуемого качества вибрационной защиты в ряде ТТМ.
Вместе с тем, процессы присоединения и настройки дополнительного упругого элемента, а также обеспечения его взаимодействия с упругим элементом трудоемки. Поэтому регулирование жесткости виброизолирующего устройства и протяженности участка рабочего хода, где это регулирование эффективно, возможно путем проектирования и изготовления новых структурных звеньев, входящих в состав дополнительного упругого элемента, а также звеньев для его присоединения к упругому элементу и обеспечения требуемых условий совместной работы обоих упругих элементов. Причем для этой цели, как правило, выполняют полный демонтаж виброизолирующего устройства.
Все это увеличивает трудоемкость процессов настройки и регулирования; снижает эффективность регулирования жесткости виброизолирующего устройства в пределах требуемого рабочего хода и соответственно не позволяет обеспечить качественную вибрационную защиту человека-оператора в полосе инфранизких частот с учетом его динамических антропометрических характеристик в ряде ТТМ.
Известно также виброизолирующее устройство, являющееся прототипом предлагаемого изобретения и содержащее основание, упругий элемент, включающий упругие звенья, рычажный направляющий механизм, механизм регулирования статической нагрузки, и дополнительный упругий элемент, включающий размещенные соосно друг другу оси вращения по меньшей мере одного из рычагов, корпус, установленный на основании, втулку, соединенную с осью с возможностью регулирования углового положения относительно последней, и плоские тонкостенные конструкции, центральные сечения которых закреплены во втулке, а концы - в корпусе с возможностью упругого изгиба по второй форме при деформировании тонкостенных конструкций в закритической области по одной из координат [5].
Данное виброизолирующее устройство реализовано и апробировано в виде опытных образцов и малых серий, применяемых в различных наземных ТТМ (в зерноуборочных комбайнах, короткобазовых самоходных кранах, мини-экскаваторах, других), а также в грузопассажирских и многоцелевых вертолетах.
Однако эффективное регулирование жесткости виброизолирующего устройства затруднительно в случае существенной нелинейности характеристик его упругого элемента, возрастающей, в частности, по мере увеличения статической нагрузки (более 1000 Н). Вместе с тем, данное виброизолирующее устройство недостаточно учитывает тот факт, что упругие звенья, входящие в состав упругого элемента, имеют большой диапазон изменения минимальной жесткости. Не учитывается также многообразие структурных и конструктивных особенностей упругого элемента, условий настройки дополнительного упругого элемента, а также структурных условий его присоединения к упругому элементу и их взаимодействия.
Все это увеличивает трудоемкость настройки дополнительного упругого элемента, в частности, за счет частичного нагружения упругого элемента; ограничивает возможности регулирования для достижения оптимального соотношения между величиной жесткости виброизолирующего устройства и протяженностью участка перемещений, на котором регулирование эффективно во всем диапазоне изменения нормируемых параметров упругих характеристик системы; снижает качество вибрационной защиты человека-оператора, в частности, при больших статических нагрузках.
Задачей предлагаемого изобретения является создание способа регулирования жесткости виброизолирующего устройства компактного сиденья для человека-оператора транспортно-технологической машины и виброизолирующего устройства для реализации способа. Предлагаемое изобретение может снизить трудоемкость настройки дополнительного упругого элемента; расширить возможности эффективного регулирования жесткости во всем диапазоне изменения нормируемых параметров упругих характеристик системы; повысить качество вибрационной защиты человека-оператора, в частности, при больших статических нагрузках.
Решение поставленной задачи достигается тем, что в известном способе, заключающемся в смягчении упругого элемента виброизолирующего устройства путем деформирования дополнительного упругого элемента в закритической области по одной из координат до второй формы изгиба, его нагружения по другой координате до одной из критических точек исходной формы равновесия и последующего совместного деформирования обоих упругих элементов за критической точкой, до сообщения системе колебаний присоединяют поочередно к упругому элементу и дополнительному упругому элементу подвижные структурные элементы, имеющие параметры, связанные между собой передаточной функцией Ф, при этом параметры дополнительного упругого элемента определяют из условия k2(ϕ)=-k1(min)(g)/Ф, где k2(ϕ) - крутильная "отрицательная" жесткость дополнительного упругого элемента в направлении локальной угловой координаты ϕ и связанная с ней нелинейной зависимостью, k1(min)(q) - минимальная жесткость упругого элемента в направлении обобщенной координаты q, далее деформируют дополнительный упругий элемент до начального рабочего состояния и фиксируют его в таком состоянии, затем обеспечивают контакт подвижных структурных элементов между собой до образования кинематической цепи, не изменяющей начальных структурных и геометрических характеристик системы, после чего освобождают дополнительный упругий элемент из фиксированного состояния, нагружают виброизолирующее устройство и удерживают его на участке минимальной по модулю суммарной жесткости упругого элемента и дополнительного упругого элемента путем параметрической стабилизации последнего в соответствии с изменениями жесткости упругого элемента.
Также поставленная задача достигается тем, что в известное виброизолирующее устройство, применяемое, например, в компактном сидении для человека-оператора транспортно-технологической машины и содержащее основание, упругий элемент, включающий упругие звенья, рычажный направляющий механизм, механизм регулирования статической нагрузки, и дополнительный упругий элемент, включающий размещенные соосно друг другу корпус и втулку, установленную с возможностью вращения, а также плоские тонкостенные конструкции, центральные сечения которых закреплены во втулке, а концы - в корпусе с возможностью упругого изгиба по второй форме при деформировании тонкостенных конструкций в закритической области по одной из координат, введен передаточный механизм, включающий опору, установленную на основании, и, по меньшей мере, два подвижных структурных элемента, один из которых, в зависимости от функционального назначения передаточного механизма, является ведущим и установлен соосно оси вращения, по меньшей мере, одного из рычагов направляющего механизма, а второй подвижный структурный элемент соответственно является ведомым и связан с втулкой, при этом дополнительный упругий элемент снабжен устройством для регулирования начального рабочего положения и диапазона рабочих угловых перемещений втулки, выполненным в виде стоек, жестко закрепленных на корпусе, упоров и рычага, причем один конец последнего установлен на втулке, а другой - размещен между упорами, установленными на соответствующих стойках с возможностью перемещения относительно корпуса и последующего фиксирования выбранного положения.
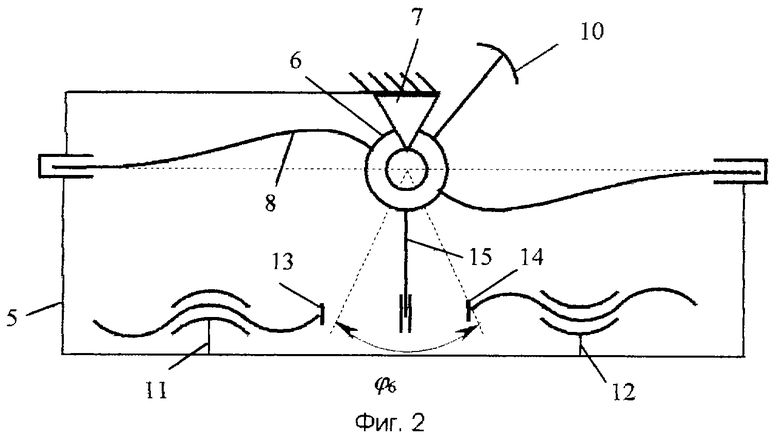
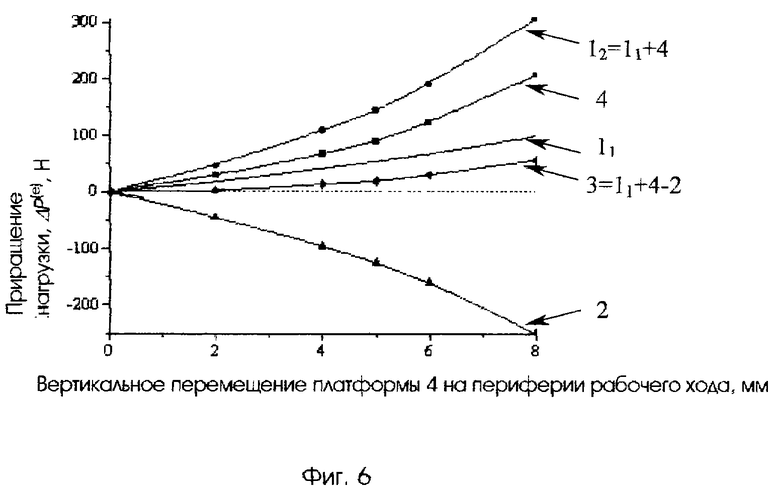
Сущность предлагаемого изобретения поясняется нижеследующим описанием и чертежами, где на фиг.1 показана структурная схема виброизолирующего устройства; на фиг.2 - структурная схема дополнительного упругого элемента с присоединенным к нему одним из подвижных структурных элементов передаточного механизма; на фиг.3 - силовые характеристики виброизолирующего устройства; на фиг.4 - фрагмент жесткостной характеристики дополнительного упругого элемента с переменной крутильной "отрицательной" жесткостью; на фиг.5 - схема прогресса качества виброзащиты путем регулирования жесткости; на фиг.6 - фрагмент силовой характеристики виброизолирующего устройства на периферии рабочего хода и схема смягчения упругого элемента при высокой нелинейности его характеристик.
Виброизолирующее устройство содержит (см. фиг.1) основание 1, упругий элемент, включающий упругие звенья, выполненные, например, в виде металлической пружины 2 растяжения-сжатия, рычажный направляющий механизм, содержащий группу промежуточных рычагов 3 и платформу 4 для размещения посадочного места компактного сиденья, и механизм регулирования статической нагрузки (не показан), например, в автоматическом режиме. Дополнительный упругий элемент включает жесткий корпус 5, связанный с основанием 1, втулку 6, установленную в собственной подшипниковой опоре 7 с возможностью вращения, и набор плоских тонкостенных конструкций 8, каждая из которых выполнена в виде пакета упругих пластинок или плоских тонкостенных стержней, несвязанных между собой, причем центральные сечения тонкостенных конструкций 8 закреплены во втулке 6, а концы - в корпусе 5 с возможностью упругого изгиба по второй форме при деформировании тонкостенных конструкций 8 в закритической области по одной из координат. При этом в виброизолирующее устройство введен передаточный механизм, содержащий опору, совмещенную с подшипниковой опорой 7, и, по меньшей мере, два подвижных структурных элемента, выполненных, например, в виде двух конических зубчатых колес 9 и 10. Причем одно из них, например 9, в зависимости от функционального назначения передаточного механизма является ведущим и установлено соосно оси вращения, по меньшей мере, одного из рычагов 5 направляющего механизма, а второе зубчатое колесо 10 соответственно является ведомым и установлено соосно втулке 6. При этом дополнительный упругий элемент снабжен (см. фиг.2) устройством для регулирования начального рабочего положения и диапазона рабочих угловых перемещений втулки 6, выполненным в виде стоек 11 и 12, жестко закрепленных в корпусе 5, упоров 13 и 14 и рычага 15, причем один конец рычага 15 соединен жестко с втулкой 6, а другой - размещен между упорами 15 и 14, установленными на соответствующих стойках 11 и 12 с возможностью перемещения относительно корпуса 5 и последующего фиксирования выбранного положения.
Способ с помощью устройства осуществляется следующим образом.
Рассчитывают и оптимизируют параметры геометрических и упругих характеристик тонкостенных конструкций 8 дополнительного упругого элемента. Для этого, используя методы конечных элементов (МКЭ) (см. например, Зенкевич О., Морган К. Конечные элементы и аппроксимация. Пер. с англ. /Под ред. Н.С.Бахвалова. - М.: Мир, 1986, 518 с.), решают нелинейную задачу цилиндрического изгиба пластинок, собранных в пакеты, при больших перемещениях. Численные расчеты и оптимизацию параметров выполняют с помощью стандартных программных продуктов, например, "Cosmos/M", "Naslran", а также оригинальных методик, развивающих известные МКЭ, и пакетов прикладных программ, разработанных на кафедре Прочности летательных аппаратов Новосибирского государственного технического университета и в Государственном Сибирском НИИ авиации (см. например, Пустовой Н.В. Исследование прочности, устойчивости и послекритических деформаций элементов конструкций при комбинированном погружении. Дис. доктора техн. наук; Новосибирск: Институт теоретической и прикладной механики Сибирского Отделения РАН, 1997). В частности разработанные методики позволяют формировать достаточно адекватные математические модели упругого деформирования пакетов пластинок при их комбинированном нагружении в закритической области. А прикладные программы существенно сокращают объем вычислений в сравнении со стандартными пакетами при, по меньшей мере, такой же точности результатов расчетов. Задачу решают с учетом критериальных ограничений на изменение параметров структурных, геометрических, прочностных и упругих характеристик дополнительного упругого элемента из условия его эффективной работы в составе виброизолирующего устройства. Ограничения определяются динамическими антропометрическими параметрами человека-оператора, размерами пространства, отведенного для размещения дополнительного упругого элемента, и т.д.
В общем случае жесткость k1(q) виброизолирующего устройства после присоединения дополнительного упругого элемента к упругому элементу может быть "положительной", нулевой, а также "отрицательной":
Здесь k1(q) - "положительная" жесткость упругого элемента в направлении обобщенной координаты q, например линейной координаты, и вертикальных перемещений платформы 4; k2(ϕ) - переменная крутильная "отрицательная" жесткость набора тонкостенных конструкций (как результат их деформирования в закритической области) дополнительного упругого элемента в направлении локальной угловой координаты ϕ и связанная с ней нелинейной зависимостью; Ф - передаточная функция, определяющая диапазон регулирования крутильной "отрицательной" жесткости для того, чтобы установить необходимое соотношение между "положительной" жесткостью упругого элемента и "отрицательной" жесткостью дополнительного упругого элемента. Это соотношение регулируется так, чтобы получить малую жесткость |k(q)|_→0.
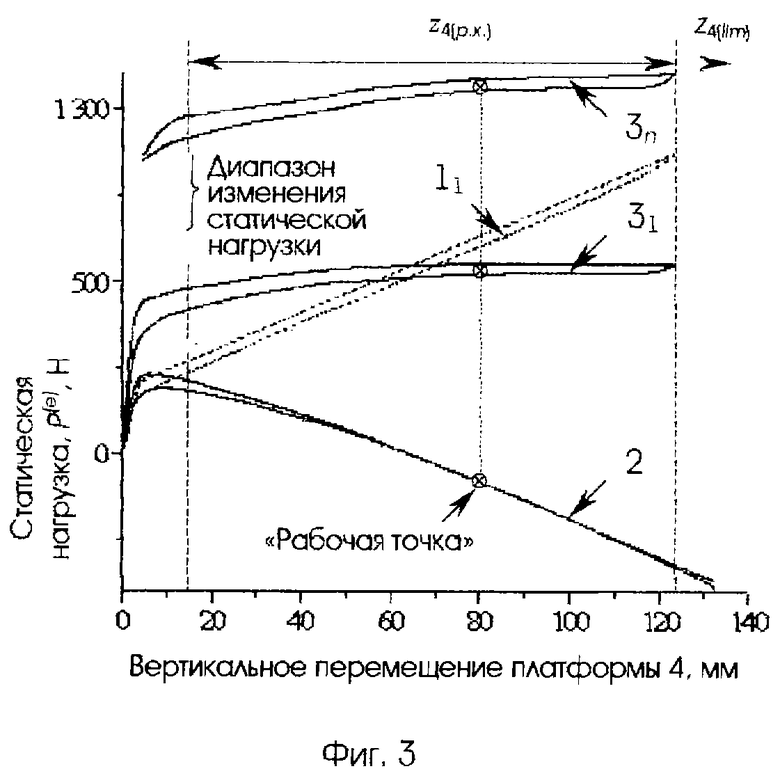
Обработка статистических данных показывает, что силовые характеристики упругого элемента, включающего упругие звенья, выполненные, например, в виде металлических или пневматических пружин, практически линейные на всем протяжении рабочего хода при малых и средних значениях Р(e)∈[500; 1000] Н нормируемой статической нагрузки, за исключением его периферийных участков (см. графики l1 на фиг. 3). Причем минимальные значения жесткости упругих элементов известных виброизолирующих устройств, применяемых в сиденьях отечественной и зарубежной экспериментальной и серийной разработки, составляют следующий ряд чисел: k1(min)z4)∈(5250; 10000] Н/м.
Тогда диапазон регулирования крутильной "отрицательной" жесткости набора тонкостенных конструкций 8 дополнительного упругого элемента определяют из уравнения (1):
Здесь i - расчетное значение передаточного отношения конической зубчатой передачи; μk - масштабный коэффициент, размерность которого определяется законом движения платформы 4, а также структурными условиями присоединения дополнительного упругого элемента к упругому элементу, в данном примере μk≈L
В процессе реализации способа настройку дополнительного упругого элемента до момента его присоединения к упругому элементу осуществляют следующим образом. Концы каждого пакета тонкостенных конструкций 8 устанавливают в опорные площадки (не показаны), выполненные в корпусе 5, а центральные сечения - в соответствующие опорные площадки, выполненные во втулке 6. Далее деформируют тонкостенные конструкции 8 в закритической области до получения их начального рабочего состояния. Для этого их сначала сжимают в продольном направлении путем перемещения опорных площадок, выполненных в корпусе 5, навстречу друг другу на величину Δ в направлении геометрической оси вращения втулки 6 до получения прогиба, однонаправленного в окружном направлении, каждого пакета. Величины Δ поджатия и стрелы прогиба пакета определяют расчетным путем из условий прочности тонкостенных конструкций 8, с одной стороны, и необходимости получения требуемого рабочего диапазона регулирования угла поворота ϕ6(p.x) втулки 6, с другой стороны, при соблюдении вышеупомянутых критериальных ограничений. Причем обычно конструкции корпуса 5 и втулки 6 рассчитывают и изготавливают так, чтобы получить межопорное расстояние  , соответствующее конечной величине Δ поджатия пакетов тонкостенных конструкций 8:
, соответствующее конечной величине Δ поджатия пакетов тонкостенных конструкций 8:
Здесь lо - длина недеформированного пакета. Затем вращают втулку 6 с помощью рычага 15. Для этого вводят в контакт с ним упор, например, 13 и перемещают последний до достижения изгибающим моментом внутренних сил упругости, возникающих при изгибе тонкостенных конструкций 8, максимального значения М2=М2(max), и фиксируют рычаг 15 и соответственно втулку 6 в таком положении с помощью упоров 13 и 14, для чего последний также вводят в контакт с рычагом 15.
До сообщения колебаний виброзащитной системе, под которой понимается здесь источник колебаний (вибрирующий пол кабины ТТМ), человек-оператор как объект защиты и виброизолирующее устройство в составе компактного сиденья поочередно присоединяют к оси вращения одного из рычагов 3 направляющего механизма упругого элемента коническое зубчатое колесо 9, а к втулке 6 дополнительного упругого элемента - коническое зубчатое колесо 10, причем параметры зубчатых колес 9 и 10 связаны между собой передаточным отношением
Здесь ϕ3(p.x) - угол поворота рычагов 3 в пределах рабочего хода платформы 4. При этом передаточное отношение конической зубчатой передачи выбирают из следующего ряда чисел i∈[0,5; 2) с учетом упомянутых выше статистических данных для k1(min) и L3 и в зависимости от поставленных задач регулирования (см. фиг.4), в частности:
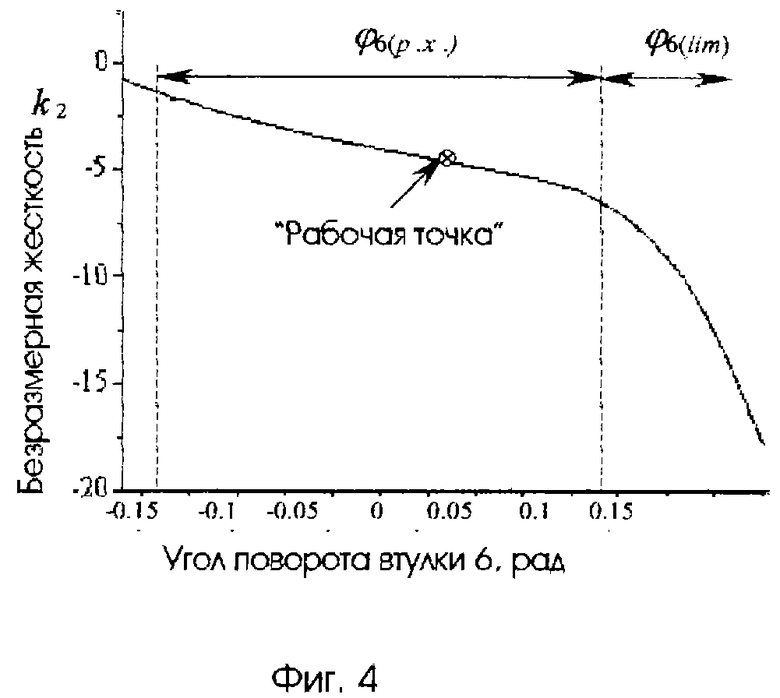
1) Передаточный механизм используется в режиме мультипликатора, если необходимо увеличить диапазон регулирования величины k2 = k2(ϕ6(p.x)) = -dM2/dϕ6(p.x) крутильной "отрицательной" жесткости тонкостенных конструкций 8 дополнительного упругого элемента при фиксированном или уменьшенном участке угловых рабочих перемещений ϕ6(p.x). Это целесообразно в виброизолирующем устройстве, где упругие звенья 2 выполнены в виде пневматической пружины, имеющей "жесткую" характеристику k1(min)(z4)≈10000 Н/м.
2) Передаточный механизм используется в режиме редуктора, если необходимо увеличить протяженность участка угловых рабочих перемещений ϕ6(p.x) при фиксированных или меньших значениях жесткости k2 = k2(ϕ6(p.x)). Это целесообразно в виброизолирующем устройстве, в котором упругие звенья 2 выполнены в виде металлической пружины (набора пружин в количестве 2-4 штук), имеющей менее "жесткую" характеристику: k1(min)(z4)≈5250 Н/м.
3) При малой и средней жесткости k1(min)(z4)∈(5250, 7500] Н/м рационально использовать передаточный механизм как прямую передачу.
Таким образом, рабочий участок ϕ6(p.x) жесткостной характеристики (см. фиг. 4) дополнительного упругого элемента, получаемый при деформировании тонкостенных конструкций 8 в закритической области, может быть использован частично или полностью. Причем настолько, насколько изменение крутильной "отрицательной" жесткости наилучшим образом позволяет решить задачу регулирования жесткости виброизолирующего устройства до необходимого минимума: |k(q)|_→0.
В общем случае, все вышеизложенные варианты компоновки возможно реализовать в одном передаточном механизме с регулируемым передаточным отношением в пределах i∈[0,5; 2), в частности, с помощью соответствующего зубчатого или фрикционного механизма, например вариатора. При этом параметры ведущего и ведомого колес вариатора будут связаны между собой передаточной функцией Ф= Ф(r, t), где r - переменный радиус ведомого колеса, t - время.
Затем зубчатые колеса 9 и 10 вводят в зацепление друг с другом до образования кинематической цепи, не изменяющей начальных структурных и геометрических характеристик системы, в частности начального числа степеней свободы платформы 4, габаритов виброизолирующего устройства и т.д.
После чего освобождают тонкостенные конструкции 8 дополнительного упругого элемента из фиксированного начального рабочего состояния, для этого выводят упор 14 из контакта с рычагом 15 до обеспечения зазора между ними, соответствующего требуемому рабочему значению угла поворота ϕ10 = ϕ6(p.x) втулки 6 совместно с установленными на ней зубчатым колесом 10 и рычагом 15. При условии синхронного вращения втулки 6 и рычагов 3 соотношение между вертикальными перемещениями z4(p.х.) платформы 4 в пределах рабочего хода и углом поворота ϕ10 зубчатого колеса 10 определяется с помощью приближенной формулы
Далее нагружают виброизолирующее устройство и удерживают его на участке минимальной по модулю суммарной жесткости |k(q)|_→0 упругого элемента и дополнительного упругого элемента в пределах рабочего хода z4(p.x.) путем параметрической стабилизации последнего (регулирования жесткости k2) в соответствии с изменениями жесткости упругого элемента.
Для реализации способа разработан ряд универсальных модулей, включающих дополнительный упругий элемент и встроенный передаточный механизм. Они компактны (объем модуля для виброизолирующего устройства сиденья не превышает 450-500 см3). Их параметры могут быть трансформированы в зависимости от предельных значений k1, L3, i, причем без изменения структуры модуля. В приведенном примере втулка 6 имеет интервал рабочих угловых перемещений ϕ6(p.x) = 0,26~0,4 радиан. Тогда из формулы (5) следует, что диапазон вертикальных перемещений платформы 4, где возможно эффективное регулирование жесткости, составляет z4(p.x.)=73~130 мм при условии i=1. Такой диапазон способен полностью перекрыть рабочий ход виброизолирующего устройства сиденья любого известного типа, который составляет обычно Zo=60~75 мм.
Как показано на фиг.3, в результате присоединения дополнительного упругого элемента с регулируемой крутильной "отрицательной" жесткостью к упругому элементу жесткость виброизолирующего устройства уменьшена от k1≥5250 Н/м до k∈[250; 750] Н/м. Здесь силовые характеристики нагруженного виброизолирующего устройства показаны до (графики l1) и после (см. графики 31 для минимальной и графики 3n - для максимальной нормируемой статической нагрузки Р(e)) присоединения дополнительного упругого элемента. Виброизолирующее устройство стало существенно "мягче" независимо от изменений статической нагрузки во всем нормируемом диапазоне P(e)∈[500; 1300) Н. При этом частота свободных колебаний виброзащитной системы уменьшена с f0∈[2; 3] Гц до fo∈[0,4; 0,7) Гц. Причем это достигается при неизменной структуре дополнительного упругого элемента.
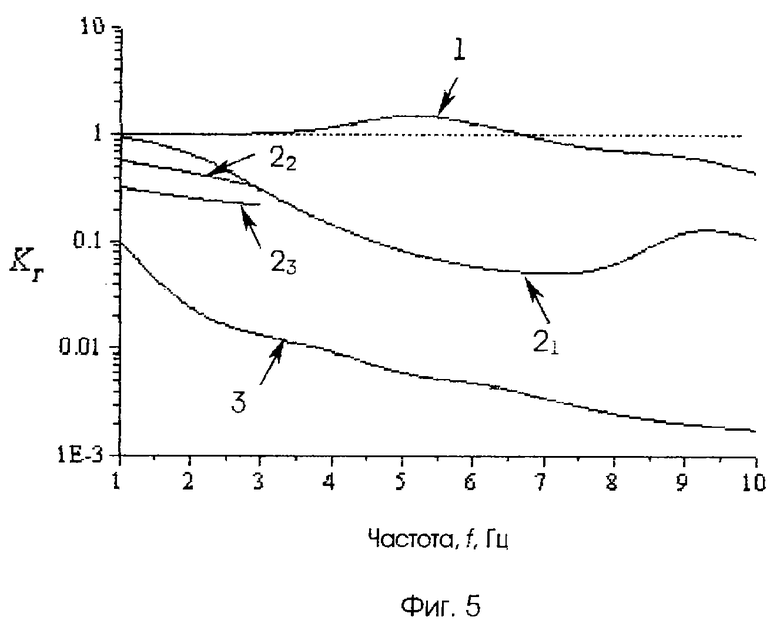
На фиг.5 показано изменение динамики модели виброзащитной системы в результате присоединения к упругому элементу и параметрической стабилизации дополнительного упругого элемента с переменной крутильной "отрицательной" жесткостью. Коэффициент передачи КT использован для независимой оценки качества вибрационной защиты с помощью виброизолирующего устройства до и после присоединения дополнительного упругого элемента:
Здесь Lout(1) и Lout(2) - виброускорения соответственно на выходе (на платформе 4) и входе (на столе вибровозбудителя) модели виброзащитной системы, измеренные в децибелах. Коэффициент эффективности  использован для сравнительной оценки качества вибрационной защиты:
использован для сравнительной оценки качества вибрационной защиты:
Здесь Lout(1) и Lout(2) - виброускорения на платформе 4 до и после присоединения дополнительного упругого элемента.
Сравнение значений коэффициентов передачи системы до (см. график 1 на фиг. 5) и после (см. графики 21~23 там же) присоединения дополнительного упругого элемента к упругому элементу виброизолирующего устройства показывает, что эффективность виброзащиты возросла на величину до KT = 20 и более в полосе частот f∈[1; 10] Гц после присоединения дополнительного упругого элемента.
Параметрическая стабилизация (регулирование жесткости k2) дополнительного упругого элемента (без изменения его структуры) дает возможность для управления качеством вибрационной защиты в исследуемой полосе частот. Настройка дополнительного упругого элемента по параметру k2 достигается путем выбора начального рабочего состояния дополнительного упругого элемента, оптимального на заданном интервале времени колебаний системы. На фиг.5, например, показано, что коэффициент передачи уменьшен с Кт∈[0,94; 0,3) (см. график 21) до КT∈[0,31; 0,22] (см. график 2), причем в наиболее трудной для управления полосе частот f∈[1; 3] Гц. Это достигнуто путем управляемого дрейфа "рабочей точки". Заметим, что в данном примере уровень демпфирования виброизолирующего устройства - коэффициент относительного демпфирования - составил γ=0,065.
Вместе с тем, экспериментально установлено, что жесткость предлагаемого виброизолирующего устройства может быть уменьшена до k=87~100 Н/м и менее, причем без потери им несущей способности. В приведенном примере такая жесткость достигается на участке z4(p.x)∈[50, 123] мм рабочего хода (см. фиг.3). В результате проведенных экспериментов частота свободных колебаний модели виброзащитной системы снижена до fо≈0,15~0,2 Гц (при демпфировании γ≈0,025). Тогда достигается принципиально более высокий уровень качества вибрационной защиты, один из которых показан графиком 3 на фиг.5.
Наряду с этим дополнительный упругий элемент с переменной крутильной "отрицательной" жесткостью может быть использован как упругий упор и обеспечить возможность смягчения упругого элемента виброизолирующего устройства также на периферийных участках z4(lim) рабочего хода. Как известно, динамическое воздействие на объект защиты увеличивается многократно на переходных режимах колебаний системы. Причина есть высокая жесткость упругого элемента (см. график l1 на фиг.6), существенно увеличивающаяся на периферийных участках рабочего хода (см. график 12 там же). Это происходит при взаимодействии подрессоренной части виброизолирующего устройства с упругими ограничителями (не показаны), имеющими "жесткую" силовую характеристику (см. график 4 на фиг. 6). Причем скачок жесткости имеет место уже на начальном участке взаимодействия. Это взаимодействие может быть уменьшено, если использовать более полно диапазон регулирования крутильной "отрицательной" жесткости k2 дополнительного упругого элемента. Например, эта величина может быть увеличена в 2~ 3 раза и более на участке ϕ6(lim) угловых перемещений втулки 6 в сравнении с участком ϕ6(p.x) (см. фиг.4). Поэтому приращения упругих сил на периферийных участках рабочего хода могут быть минимизированы (см. график 3 на фиг.6) за счет частичного использования участка ϕ6(lim).
Дополнительный упругий элемент с переменной крутильной "отрицательной" жесткостью, выполненный в виде модуля, включающего передаточный механизм, может быть присоединен к упругому элементу независимо от его конструктивных особенностей. При этом процессы присоединения, настройки, а также демонтажа дополнительного упругого элемента в случае регламентного обслуживания или ремонта не требуют использования упругого элемента, например, путем его частичного предварительного нагружения. Это сокращает трудо- и энергозатраты, связанные с присоединением и настройкой. Кроме того, сохраняется конструкционная целостность и работоспособность упругого элемента в случае выхода из строя дополнительного упругого элемента и наоборот сохраняется работоспособность последнего в случае отказа упругого элемента.
С помощью предлагаемого изобретения возможно непрерывное, в широких пределах регулирование крутильной "отрицательной" жесткости дополнительного упругого элемента, причем независимо от абсолютных размеров рабочего пространства для его размещения, с учетом нелинейности характеристик упругого элемента виброизолирующего устройства и во всем диапазоне регулирования статической нагрузки. В свою очередь, это позволяет регулировать жесткость виброизолирующего устройства для достижения требуемого уровня качества вибрационной защиты.
Для реализации способа разработан численный метод расчета и оптимизации параметров тонкостенных упругих конструкций с переменной крутильной "отрицательной" жесткостью. Разработана конструкторская документация и изготовлены опытные образцы дополнительного упругого элемента и передаточного механизма для его присоединения к упругому элементу виброизолирующего устройства и регулирования его жесткости. Результаты лабораторных исследований, полученные в процессе сравнительных испытаний образцов наиболее эффективного ближайшего аналога и виброизолирующего устройства для реализации предлагаемого способа, показывают существенное преимущество последнего.
Таким образом, предлагаемое изобретение в сравнении с прототипом снижает трудоемкость настройки дополнительного упругого элемента и процесса осуществления его взаимодействия с упругим элементом, расширяет диапазон регулирования крутильной "отрицательной" жесткости дополнительного упругого элемента и увеличивает протяженность рабочего хода, где возможно эффективное регулирование жесткости виброизолирующего устройства при его оптимальных структурных и геометрических характеристиках, причем во всем диапазоне изменения нормируемых характеристик системы. Также это позволяет обеспечить более высокое качество вибрационной защиты человека-оператора ТТМ, в частности, в полосе инфранизких частот, наиболее вредных и опасных с точки зрения состояния здоровья, эффективности работы и функционального комфорта, причем с учетом его динамических антропометрических характеристик.
Источники информации
1. Виброзащитные системы с квазинулевой жесткостью. П.М.Алабужев, А.А. Гритчин, Л. И. Ким и др. /Под ред. К.М.Рагульскиса. - М.: Машиностроение, 1986, с. 9-11.
2. Чупраков Ю. И. Гидравлические системы защиты человека-оператора от общей вибрации. - М.: Машиностроение, 1987, с. 28-33.
3. Патент 2115570, Российская Федерация, МКИ B 60 N 1/02, 1998.
4. А.с. СССР 1717433, МКИ B 60 N 2/50, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛИРУЮЩИЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2019 |
|
RU2753061C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 1993 |
|
RU2076961C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРФОРАТОР | 1999 |
|
RU2152500C1 |
| Способ исследования эффективности виброизолирующего устройства с тросовыми элементами | 1985 |
|
SU1401313A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
Изобретение относится к способом регулирования жесткости виброизолирующих устройств в системах вибрационной защиты человека-оператора наземных транспортных и самоходных технологических машин, а также пилотов вертолетов. Способ заключается в смягчении упругого элемента виброизолирующего устройства путем деформирования дополнительного упругого элемента в закритической области до второй формы изгиба. Для этого к обоим упругим элементам присоединяют подвижные структурные элементы, имеющие параметры, связанные между собой передаточной функцией, которая одновременно устанавливает зависимость между минимальной жесткостью упругого элемента и переменной крутильной "отрицательной" жесткостью дополнительного упругого элемента. Затем деформируют последний до начального рабочего состояния и фиксируют его в таком состоянии, обеспечивают контакт подвижных структурных элементов между собой до образования кинематической цепи, не изменяющей структурных и геометрических характеристик системы. Далее освобождают дополнительный упругий элемент из фиксированного состояния, нагружают виброизолирующее устройство и удерживают его на участке минимальной по модулю суммарной жесткости обоих упругих элементов. В виброизолирующее устройство, содержащее основание, упругий элемент и дополнительный упругий элемент, а также плоские тонкостенные конструкции, установленные с возможностью изгиба по второй форме при их деформировании в закритической области, введен передаточный механизм, включающий опору и не менее двух подвижных структурных элементов, один из которых связан с упругим элементом, а второй - с дополнительным упругим элементом, снабженным устройством для регулирования его начального рабочего положения и диапазона рабочих перемещений. Технический результат - уменьшение трудоемкости настройки виброизолирующего устройства, повышение эффективности регулирования его жесткости и соответственно качества вибрационной зашиты. 2 с. п. ф-лы, 6 ил.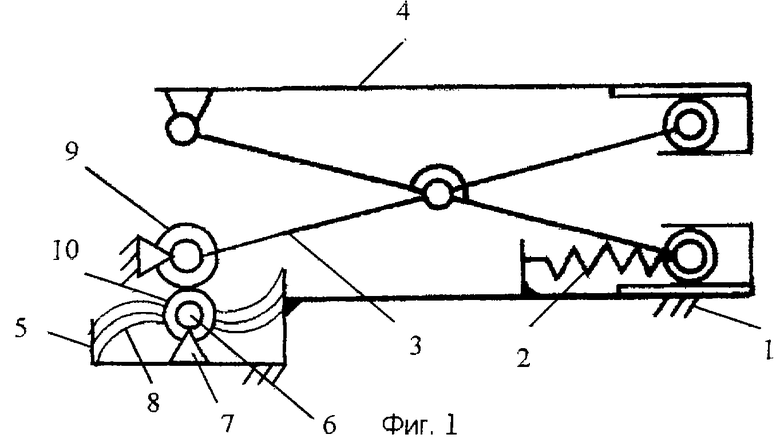
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| Подвеска сиденья водителя транспортного средства | 1989 |
|
SU1717433A1 |
| Виброизолирующая опора | 1986 |
|
SU1421908A1 |
| GB 2169504, 16.07.1986 | |||
| US 4408744, 11.10.1983 | |||
| DE 2929207, 07.02.1981. | |||

