Изобретение относится к области машиностроения и может быть использовано в вибрационных технологических машинах для реализации режимов вибрационного подбрасывания сыпучих рабочих сред, состоящих из гранулированных элементов.
В процессах вибрационных взаимодействий гранулированная рабочая среда определенным образом изменяет поверхностные свойства обрабатываемых деталей, что нашло применение в технологических процессах вибрационного упрочнения материалов. Необходимое качество обработки поверхностей обеспечивается достижением определенной структуры вибрационного поля. Технологические аспекты этой проблемы заключаются в том, чтобы рабочий орган вибрационной машины совершал только вертикальные поступательные движения, при этом угловые колебания, возникающие при работе вибростенда, должны сводиться к минимуму.
Изменение динамического состояния различных механических систем в настоящее время связано с введением в структуру вибрационных машин различных связей в виде устройств, способных изменять частоты собственных колебаний и режимы взаимодействия элементов, что позволяет обеспечить необходимые свойства вибрационной системы. Возможности таких подходов ограничиваются особенностями конструктивной реализации устройств, позволяющих рассеивать энергию колебаний. В связи с этим актуальным направлением является поиск рациональных конструктивных решений, основанных на новых способах изменения динамического состояния вибрационной технологической системы.
Известно устройство для изменения динамического состояния системы при действии вибрации [Остроменский П.И., Никифоров И.С., Кинаш Н.Ж., Остромеиская В.А. «Виброзащитная подвеска сидения». Патент RU 2156192 С2, МПК B60N 2/54, приоритет от 15.07.1996]. Виброзащитная подвеска сиденья, содержащая несущую опору и подвесную опору, между которыми закреплен основной упругий подвес и корректор жесткости - дополнительный упругий подвес с неустойчивым средним положением равновесия, причем корректор жесткости выполнен из двух одинаковых сжатых до овальной формы упругих кольцевых элементов, расположенных против друг друга симметрично относительно продольной оси симметрии сиденья, причем ближайшие участки упругих кольцевых элементов прикреплены шарнирно к одной опоре, а диаметрально противоположные участки кольцевых элементов шарнирно соединены с другой опорой, при этом большие оси симметрии сжатых упругих кольцевых элементов и оси всех их шарнирных соединений с опорами параллельны продольной оси сиденья.
Упругие кольцевые элементы виброзащитной подвески сиденья выполнены из троса. Каждый упругий кольцевой элемент выполнен в виде бухты, намотанной, например, из пружинной ленты или проволок и с возможностью относительного перемещения витков с трением.
Недостатком данного изобретения является наличие неустойчивого среднего положения корректора, что при динамических воздействиях может привести к неустойчивости вибрационной технологической системы в целом.
Также к недостаткам следует отнести невозможность изменять параметры динамической системы в широком диапазоне частот.
Известен способ изменения динамических свойств и устройство с квазинулевой жесткостью [Кочетов О.С, Кочетова М.О., Ходакова Т.Д. «Способ виброизоляции и виброизолятор с квазинулевой жесткостью». Патент RU 2298119 C1, МПК F16F 7/08, F16A 9/06, приоритет от 19.09.2005].
Способ виброизоляции, заключающийся в том, что вибрирующий объект устанавливают на плоские упругие элементы, а демпфирование колебаний осуществляют с помощью демпфера, при этом плоские упругие элементы выполняют в виде пакета упругих элементов арочного типа, а демпфирование колебаний осуществляют с помощью вязкоупругого демпфера, сделанного в виде упруго демпфирующего кольца, связанного с упругими элементами через втулки и расположенного в плоскости, перпендикулярной вертикальной оси пакета упругих элементов за счет радиальной деформации упругих элементов.
Устройство с квазинулевой жесткостью, содержащее плоские упругие и демпфирующие элементы, при этом плоские упругие элементы выполнены в виде пакета упругих элементов арочного типа в виде набора чередующихся во взаимно перпендикулярных направлениях плоских пружин, опирающихся на основание, а демпфирующий элемент виброизолятора выполнен в виде упругодемпфирующего кольца из эластомера, расположенного по замкнутому контуру в плоскости, перпендикулярной оси виброизолятора, и взаимодействующего с втулками, которые связаны с опорными участками плоских пружин посредством заклепок, причем упругодемпфирующее кольцо имеет в поперечном сечении форму круга, эллипса, треугольника, квадрата, прямоугольника, многоугольника.
Упругодемпфирующее кольцо выполнено полым и имеет в поперечном сечении форму круга, эллипса, треугольника, квадрата, прямоугольника, многоугольника, причем полость упругодемпфирующего кольца заполнена вязкой жидкостью или сжатым до определенного давления воздухом или газом.
Недостатками данного изобретения являются: необходимость при гашении колебаний использовать дополнительно демпфер вязкого трения; невозможность настройки устройства в процессе работы на необходимые режимы, в частности отстраиваться от резонансных частот, осуществлять настройку режимов динамического гашения, а также формировать необходимую структуру вибрационного поля системы.
Известен способ регулирования жесткости динамической системы и устройство для его осуществления [Хоменко Л.П., Елисеев СВ., Белокобыльский С.В., Упырь Р.Ю., Трофимов Л.Н., Паршута И.А., Сорин В.В. «Способ регулирования жесткости виброзащитной системы и устройство для его осуществления». Патент RU 2440523 С2, МПК F16F 15/04, приоритет 20.01.2012]. Способ регулирования жесткости заключается в установке пружины с положительной жесткостью и дополнительного упругого элемента в виде вращающихся масс. Вращение масс вокруг вертикальной оси создает центробежные силы, обеспечивающие изменение суммарной жесткости устройства. Вращение масс создает «отрицательную» жесткость, которая зависит от угловой скорости вращения.
Упругие дополнительные устройства представлены в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты с возможностью создания центробежных инерционных сил вращения вокруг вертикальной оси.
К недостаткам данного изобретения можно отнести сложность настройки процесса и необходимость обеспечения вращения дополнительных масс вокруг вертикальной оси с применением источников энергии.
К наиболее близкому техническому решению следует отнести способ регулирования жесткости виброзащитной системы и устройство для его осуществления [Елисеев С.В., Хоменко А.П., Ермошенко Ю.В., Большаков Р.С., Ситов И.С., Кашуба В.Б., Белокобыльский С.В. «Способ регулирования жесткости виброзащитной системы и устройство для его осуществления» Патент RU 2475568 С2, МПК F16F 7/10, F16F 15/02, приоритет 20.02.2013]. Способ регулирования жесткости вибрационной технологической машины, включающий 2-ступенчатое гашение вибрации, осуществляемое основным и дополнительными элементами виброзащитной системы, отличающийся тем, что на дополнительную промежуточную платформу прикладывают две силы (вибраторы), направленные в противоположном направлении, обеспечивающие взаимное гашение горизонтальных колебаний, гашение вертикальных сил от внешнего возмущения осуществляют тем, что накладывают на вибраторы дополнительные силы в виде двух дисбалансов с меняющимися величинами в зависимости от внешнего возмущения путем совместного изменения радиусов двух дисбалансов, чем обеспечивается соответствующее регулирование приведенной жесткости системы. Устройство для осуществления регулирования вибрационной технологической системы, включающее виброзащитную систему, состоящую из основного и дополнительного упругого элементов, отличающееся тем, что на дополнительную промежуточную платформу устанавливают два регулируемых инерционных вращательных вибратора, обеспечивающих взаимную компенсацию возникающих горизонтальных динамических сил, гашение вертикальных сил, возникающих от внешнего воздействия, достигается путем установки на инерционных вращающихся вибраторах двух дисбалансов с изменяющимся динамическим воздействием за счет настройки радиуса дисбаланса.
К недостаткам данного изобретения следует отнести: сложность конструкции, в результате которой многочисленные регулировочные элементы динамической системы крепятся только к объекту защиты, что создает дополнительные нагрузки на него и, следовательно, на упругие элементы, на которых закреплен объект, что влечет за собой снижение срока службы эффективной работы системы; за счет наличия вибраторов и дисбалансов создаваемое угловым вращением вибрационное поле приводит к неравномерному распределению амплитуд колебаний по объекту управления, что приводит к появлению на нем существенных дефектных зон в местах несбалансированного воздействия угловых колебаний.
Цель предлагаемого изобретения заключается в том, чтобы упростить регулировку режимов работы и формирования структуры вибрационного поля с использованием эффектов динамического гашения угловых колебаний с помощью специального регулируемого устройства.
Способ управления динамическим состоянием вибрационной системы или вибрационного технологического комплекса, состоящего из рабочего органа в виде твердого тела на упругих элементах, имеющего инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивая возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса.
Устройство, реализующее способ, представляющее собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
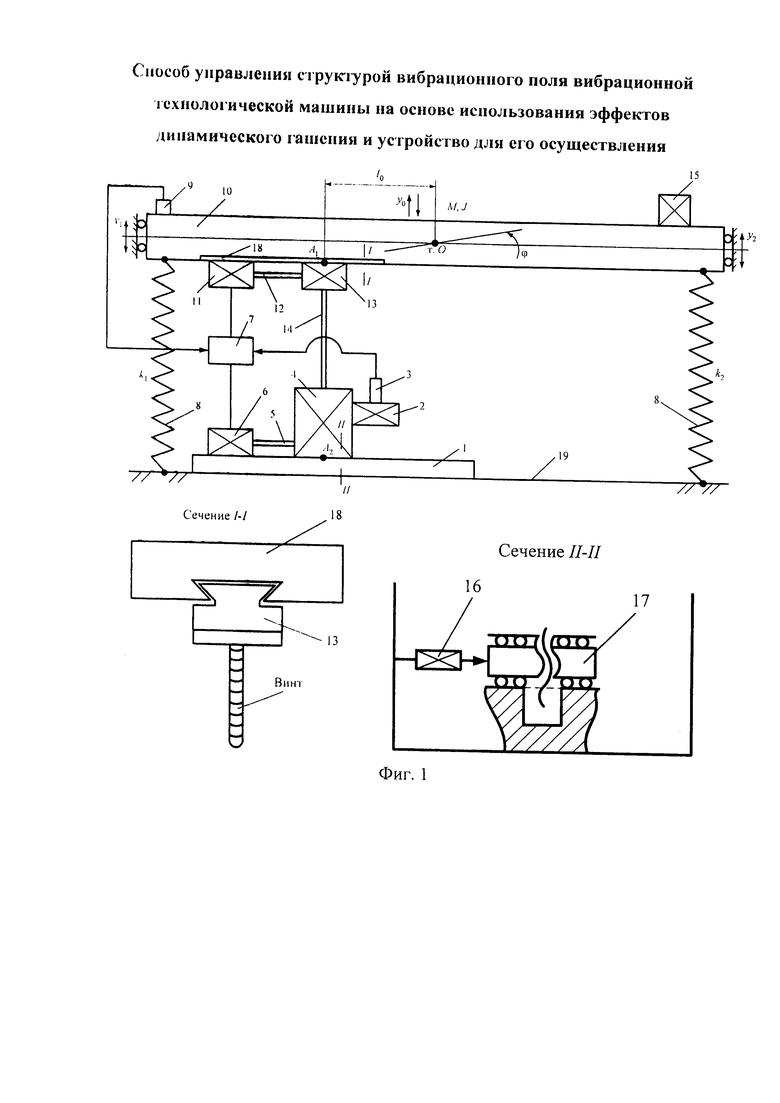
На фиг. 1 показана схема для формирования структуры вибрационного поля и сечения исполнительного механизма.
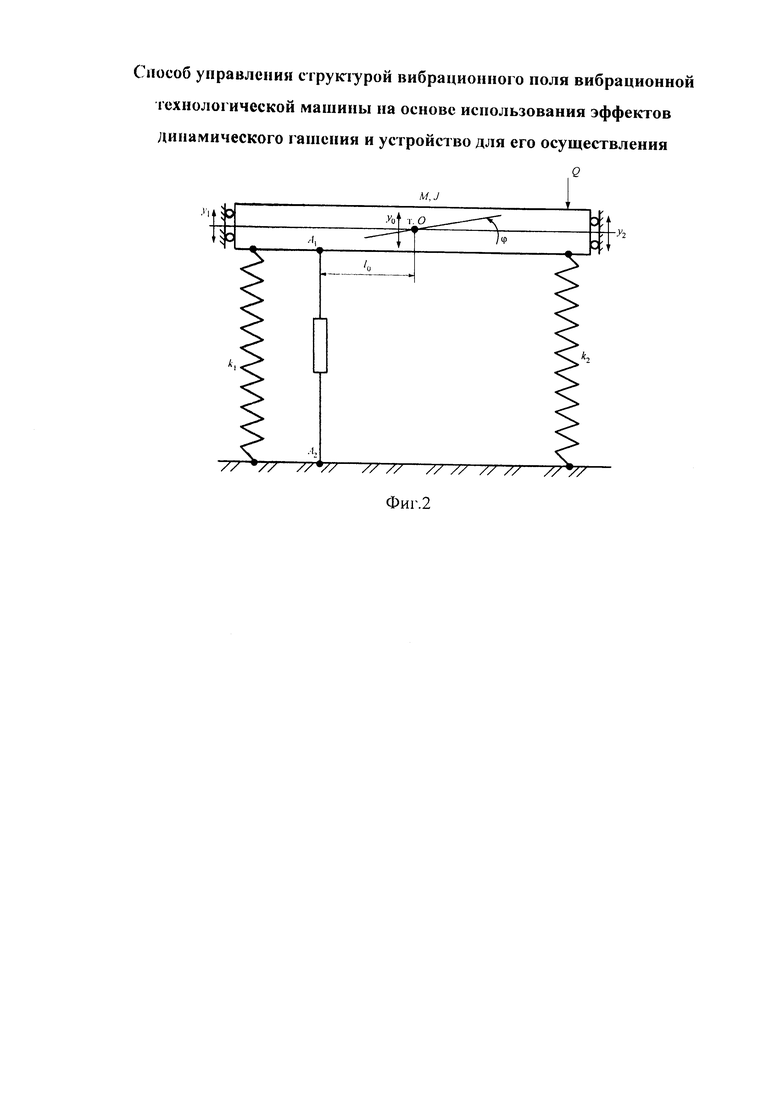
На фиг. 2 показана принципиальная расчетная схема вибрационного технологического комплекса.
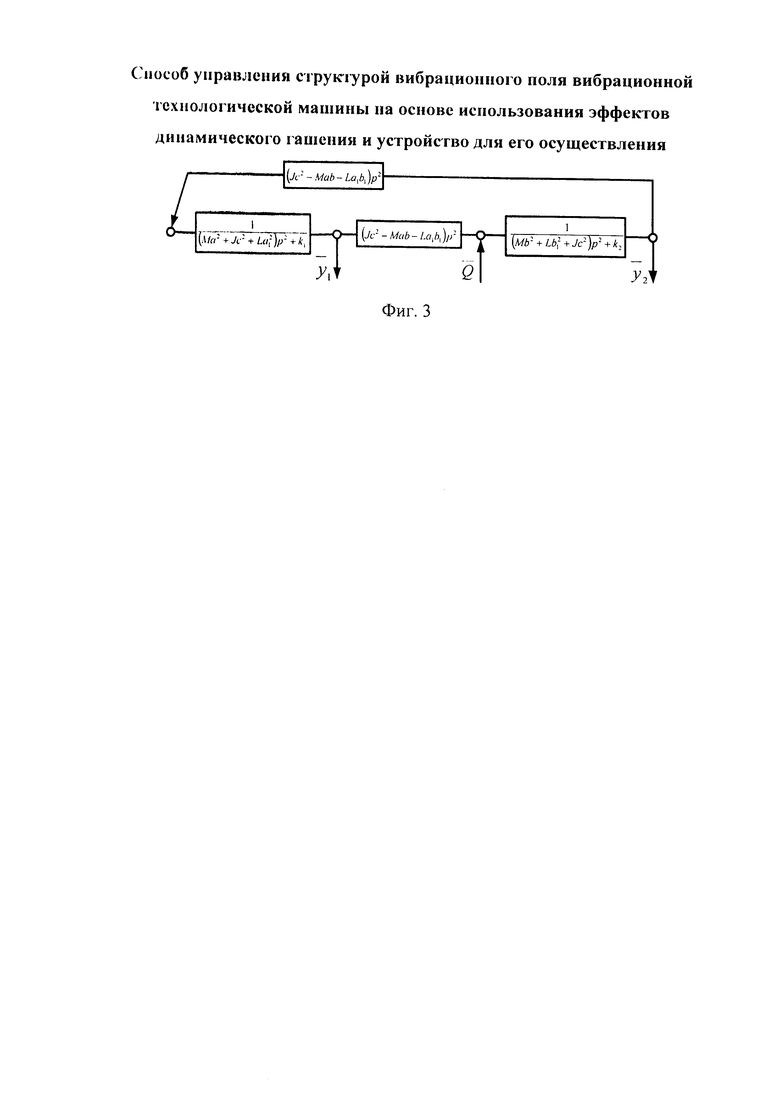
На фиг. 3 показана структурная математическая модель вибрационной технологической машины.
На фиг. 1 показаны: направляющая 1; прижимное устройство 2; датчик прижимного усилия 3; корпус 4; ходовой винт 5; электропривод 6; блок управления 7; упругие элементы 8; датчик параметров вибрационного поля 9; рабочий орган 10; электропривод 11; ходовой винт 12; верхняя часть блока с винтовым механизмом 13; винт устройства для преобразования движения 14; инерционный вибровозбудитель 15; преобразователь 16; гайка-маховик 17; направляющая 18; основание 19.
Введены следующие обозначения: y0 - колебания центра тяжести рабочего органа 10; М - масса рабочего органа 10; J - момент инерции рабочего органа 10; y1, y2 - линейные колебания рабочего органа 10; ϕ - угловое колебание рабочего органа 10; т. О - центр тяжести рабочего органа 10; т. А1 - точка крепления верхней части блока винтового механизма 13 к направляющей 18; т. А2 - точка крепления корпуса 4 к направляющей 1; l0 - расстояние от центра тяжести рабочего органа 10 до вертикальной оси А1А2; k1 и k2 - жесткости упругих элементов 8.
Принцип работы вибрационного технологического комплекса можно пояснить, используя принципиальную расчетную схему, приведенную на фиг. 2.
Система представляет собой твердое тело с массоинерционными параметрами М, J, опирающееся на упругие элементы с жесткостями k1 и k2. Точки крепления пружин удалены от центра тяжести (т. О) на расстояние l1 и l2 соответственно. В тт. А1 и А2 произведено закрепление устройства для преобразования движения в виде несамотормозящегося винтового механизма; гайка-маховик, как показано на фиг. 1, закреплена в корпусе 4 (фиг. 1), который может передвигаться по опорной поверхности, используя направляющие 1 (фиг. 1). Винт устройства для преобразования движения 14 (фиг. 1) закреплен в верхней части блока винтового механизма 13 (фиг. 1), который также может перемещаться в горизонтальной направляющей 18 (фиг. 1, сечение I-I) с помощью электроприводов 6 и 11 (фиг. 1), синхронно вращающих ходовые винты 5 и 12 (фиг. 1), связанные с подвижным корпусом 4 и верхней частью блока винтового механизма 13 (фиг. 1) устройства для преобразования движения. В сечении II-II (фиг. 1) гайка-маховик 17 имеет момент инерции J0. Приведенная масса устройства для преобразования движения (УПД) обозначается:

где rcp - средний радиус винта УПД; α - угол наклона винтовой нарезки (выбирается в пределах 45° до 70°).
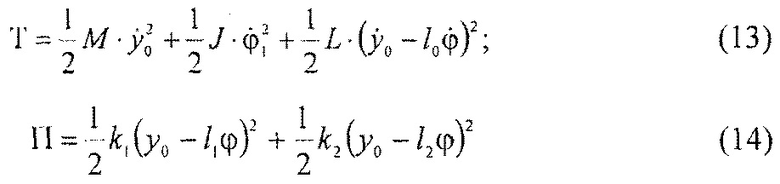
Математическая модель вибрационного комплекса может быть построена на основе использования уравнения Лагранжа второго рода. Выражения для кинетической и потенциальной энергий объекта имеют вид:
где y1, y2 - рассматриваются в системе координат, связанной с неподвижным базисом. Воспользуемся известными соотношениями между координатами:

здесь  .
.
В свою очередь:

Координата  , где закрепляется УПД, определяется расстоянием l0 (фиг. 2) от центра тяжести (т. О):
, где закрепляется УПД, определяется расстоянием l0 (фиг. 2) от центра тяжести (т. О):

таким образом:
где

Система уравнений движения рабочего органа (Фиг. 2) имеет вид:

В уравнениях (9) Q является внешним гармоническим воздействием, создающим вибрационное поле для рабочего органа 10 на фиг. 1.
После преобразований Лапласа система уравнений (9) может быть преобразована в систему алгебраических уравнений, на основе которых строится структурная математическая модель, как показано на фиг. 3.
На структурной схеме р=jω является комплексной переменной, значок (-) означает изображение переменной по Лапласу. Из структурной схемы (фиг. 3) найдем отношение амплитуд, формируемое действием силы Q; при этом понимается, что переходные процессы из-за наличия диссипативных сил не оказывают существенного влияния. Таким образом получим, что:

Из (10) следует, что при  вибрационное поле будет иметь необходимую однородную структуру на частоте:
вибрационное поле будет иметь необходимую однородную структуру на частоте:

Из выражения (11) найдем, что

В системе координат y0, ϕ выражения для кинетической и потенциальной энергий имеют вид:
Система уравнений в этом случае преобразуется к виду:

Передаточная функция по ϕ при действии Q формируется в системе координат таким образом, что имеется два входных воздействия: по координате y0 - Q и по координате ϕ - Ql2. Таким образом:

Выражение (16) получено после применения к (15) преобразований Лапласа с учетом двух внешних возмущений: по координате у0 - Q и по координате ϕ - Ql2 соответственно.
В выражении (16) знаменатель имеет вид:

Частота динамического гашения по координате ϕ определяется выражением

Очевидно, что выражения (12) и (18) совпадают.
Таким образом, режим соблюдения однородности вибрационного поля 
На основании развитых доказательных позиций можно утверждать, что реализация способа управления динамическим состоянием вибрационного технологического комплекса принципиально осуществима с обеспечением однородности структуры вибрационного поля.
Возможные отклонения от заданного режима компенсируются двумя настроечными факторами: изменением положения точки А1, то есть изменением величины l0, что достигается соответствующим перемещением устройства для преобразования движения по горизонтальной опорной поверхности. Вторая возможность настройки вибрационного поля обеспечивается за счет приложения к ободу гайки-маховика тормозного момента сил, который, в физическом смысле, интерпретируется таким же динамическим эффектом, что и смещение точки A1 на величину l0. В динамических аспектах взаимодействие устройства для преобразования движения с вибрационной технологической системой может рассматриваться как коррекция момента сил относительно центра тяжести системы, вокруг которого движение сводится к режиму динамического гашения угловых колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Устройство управления вибрационным полем технологической машины | 2017 |
|
RU2689901C2 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| Самонастраивающийся амортизатор | 2018 |
|
RU2696150C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
Группа изобретений относится к области машиностроения. Способ управления включает введение в конструктивно-техническую схему системы устройства для преобразования движения несамотормозящегося винтового механизма с гайкой-маховиком. Генерируют дополнительные стабилизирующие движения рабочего органа для обеспечения возможности регулирования и настройки вибрационной системы. Устройство генерирует управляющее воздействие в определенной точке рабочего органа вибростенда. Точка приложения усилия на рабочий орган имеет возможность изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов. Электроприводы обеспечивают перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов. Информация с датчиков, контролирующих вибрационное состояние и системы, поступает в специальный программный блок. Достигается упрощение регулировки режимов работы. 2 н.п. ф-лы, 3 ил.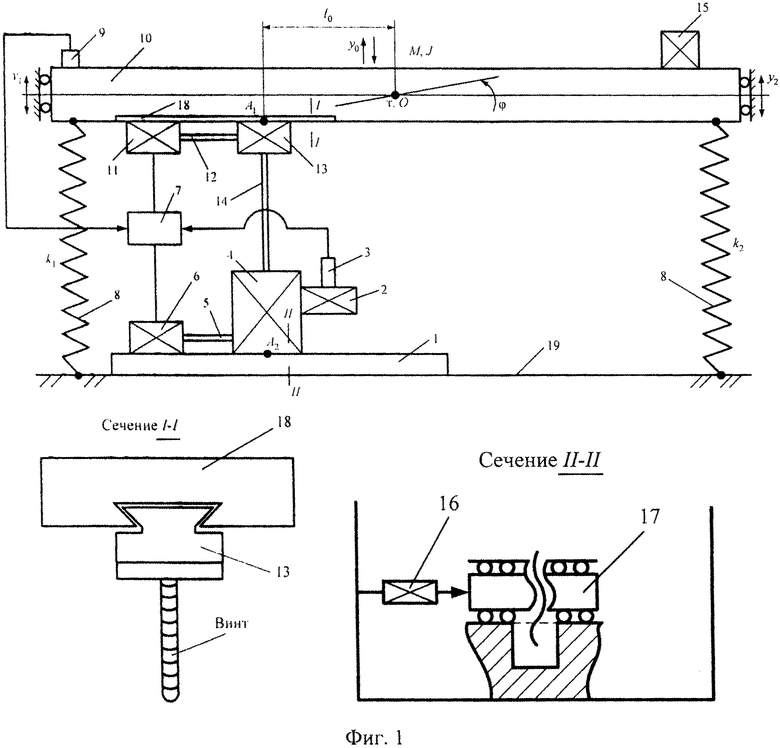
1. Способ управления динамическим состоянием вибрационной системы или вибрационного технологического комплекса, состоящего из рабочего органа в виде твердого тела на упругих элементах, имеющего инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса.
2. Устройство, реализующее способ, представляющее собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

