Настоящее изобретение относится к приемнику для приема радиочастотного сигнала.
Примером приемника для приема радиочастотного сигнала является приемник глобальной системы определения местоположения (GPS), которая принимает сигнал со спутника GPS для определения местоположения. Например, в то время как сигнал GPS модулирован на несущей волне, имеющей частоту 1575,42 МГц, для передачи, сигнал GPS имеет ширину полосы приблизительно 2 МГц. В приемнике GPS, раскрытом, например, в US 2006/234667, соответствующем JP-2006-222759A, принимаемый радиочастотный (РЧ, RF) сигнал фильтруется узкополосным фильтром с постоянной полосой пропускания для улучшения отношения сигнал/шум (SNR) сигнала GPS.
В последние годы имелась повышенная потребность в выполнении определения местоположения с использованием спутниковой системы, иной чем GPS, и были разработаны различные типы систем, такие как GLONASS (Россия) и GALILEO (Европейский Союз, EU). Если возможно принимать сигналы со спутников этих различных типов систем, может ожидаться улучшение точности определения местоположения.
Однако частоты несущих волн и ширины полос сигналов, которые должны модулироваться на несущих волнах, обычно меняются в зависимости от спутниковых систем. Например, как описано выше, сигнал GPS имеет частоту несущей волны 1575,42 МГц и имеет ширину полосы приблизительно 2 МГц. В противоположность, спутниковый сигнал GLONASS имеет частоту несущей волны 1602+0,5625n (n =1, 2,..., 24) МГц и имеет ширину полосы около 1 МГц.
Поэтому для приема сигналов со спутников различных типов систем через общий канал, есть необходимость в увеличении полосы пропускания ограничивающего полосу фильтра с тем, чтобы перекрывать ширину полосы всех сигналов. Однако по мере того, как увеличивается полоса пропускания ограничивающего полосу фильтра, повышается вероятность приема помеховой волны.
Ввиду вышеприведенного, цель настоящего изобретения состоит в том, чтобы предложить приемник, сконфигурированный для выполнения ограничения полосы, чтобы минимизировать влияние помеховой волны.
Согласно аспекту настоящего изобретения, приемник для приема радиочастотного сигнала включает в себя фильтр, вычислитель и регулятор. Фильтр имеет настраиваемую полосу пропускания и пропускает принятый радиочастотный сигнал в пределах полосы пропускания для генерации отфильтрованного сигнала. Вычислитель рассчитывает отношение сигнал/шум принятого радиочастотного сигнала на основании отфильтрованного сигнала. Регулятор настраивает полосу пропускания фильтра таким образом, что рассчитанное отношение сигнал/шум становится максимальным.
Вышеприведенные и другие цели, признаки и преимущества настоящего изобретения станут более очевидными из следующего подробного описания со ссылками на прилагаемые чертежи: На чертежах:
фиг.1 - структурная схема, иллюстрирующая приемник согласно варианту осуществления настоящего изобретения;
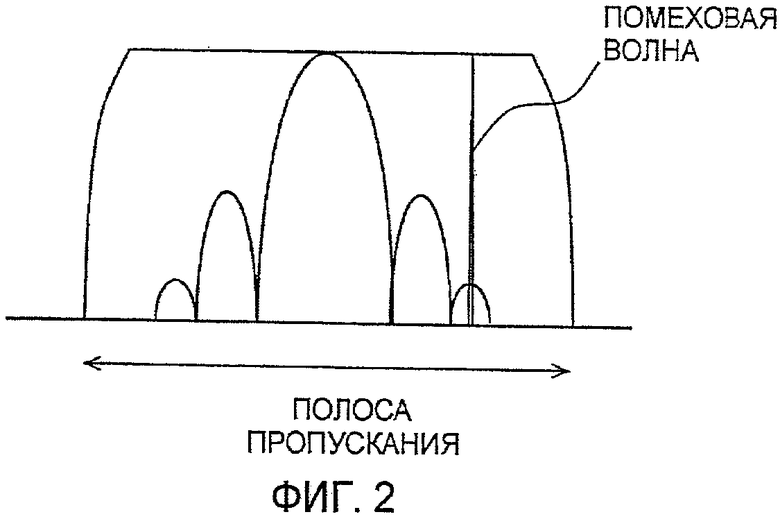
фиг.2 - схема, иллюстрирующая распространение принимаемого сигнала GPS L1;
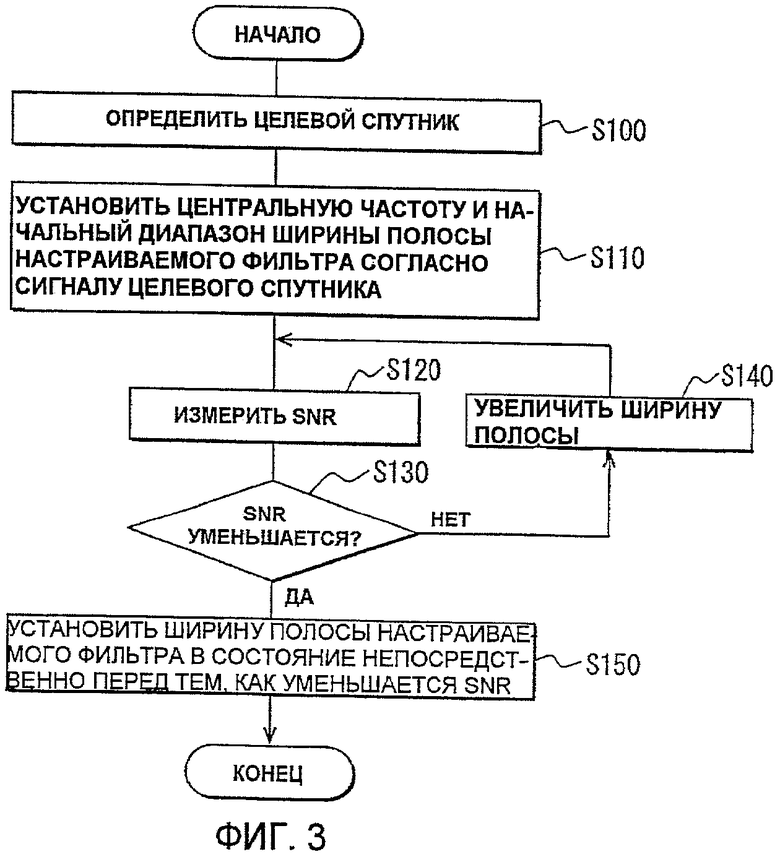
фиг.3 - блок-схема последовательности операций способа, иллюстрирующая процедуру для настройки настраиваемого фильтра приемника; и
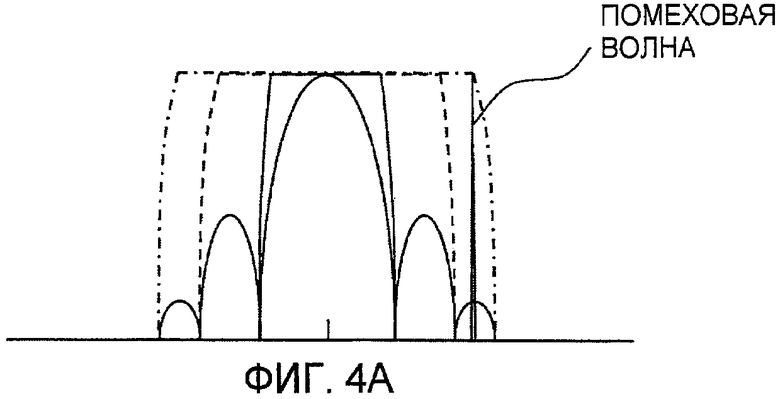
фиг.4A - схема, иллюстрирующая способ, которым увеличивается полоса пропускания настраиваемого фильтра, и
фиг.4B - схема, иллюстрирующая изменение отношения сигнал/шум с увеличением полосы пропускания настраиваемого фильтра.
Приемник 1 согласно варианту осуществления настоящего изобретения описан ниже со ссылкой на чертежи. Приемник 1 сконфигурирован для приема спутниковых сигналов из различных типов спутниковых систем, таких как GLONASS (Россия) и GALILEO (Европейский Союз). Отмечено, что приемник 1 может быть сконфигурирован в качестве приемника для другого средства связи, такого как сотовый телефон, ЧМ-радиовещание, электронный сбор пошлин (ETC) и система информирования и связи транспортных средств (VICS).
Фиг.1 - структурная схема приемника 1. Приемник 1 имеет многочисленные каналы приема для того, чтобы одновременно принимать многочисленные спутниковые сигналы. Поскольку каждый канал приема имеет одну и ту же конфигурацию, фиг.1 изображает только один канал приема. Приемник 1 одновременно принимает спутниковые сигналы с многочисленных спутников и измеряет псевдодальности до спутников. Кроме того, приемник 1 выполняет расчет определения местоположения на основании измеренных псевдодальностей, рассчитывает величину оцениваемой ошибки по отношению к решению местоположения и рассчитывает окончательное местоположение на основании решения местоположения и величины оцениваемой ошибки.
На фиг.1 антенна 2 принимает многочисленные спутниковые сигналы (РЧ-сигналы), имеющие разные частоты, и выдает принятые РЧ-сигналы на малошумящий усилитель 3 (МШУ, LNA). Например, антенна 2 может принимать как волновой сигнал L1 (1575,42 МГЦ) GPS, так и волновой сигнал L1 (1602+0,5625n (n = 1, 2,..., 24) МГц) GLONASS. МШУ 3 усиливает РЧ-сигнал, принятый антенной 2, а затем выдает РЧ-сигнал в полосовой фильтр 4 (ПФ, BPF). ПФ 4 имеет полосу пропускания частот, в которой существуют частоты несущих волн всех спутниковых сигналов.
Управляемый напряжением генератор 6 (ГУН, VCO) формирует сигнал преобразования на основании предопределенной опорной частоты и выдает сигнал преобразования в смеситель 5. Сигнал преобразования имеет предопределенную частоту по отношению к частоте РЧ-сигнала, отфильтрованного посредством ПФ 4. Смеситель 5 выполняет преобразование с понижением частоты, смешивая РЧ-сигнал, проходящий через ПФ 4, и сигнал преобразования, сформированный посредством ГУН 6, тем самым формируя сигнал промежуточной частоты (ПЧ, IF).
Сигнал ПЧ, сформированный смесителем 5, выдается на полосовой фильтр 7 (ПФ). Подобно ПФ 4, ПФ 7 имеет полосу пропускания частот, которая позволяет частотам несущих волн всех спутниковых сигналов в сигнале ПЧ проходить через ПФ 7. Этим способом частотная составляющая, соответствующая частоте несущей волны РЧ-сигнала, который должен приниматься, извлекается посредством двух полосовых фильтров - ПФ 4 и ПФ 7. В качестве альтернативы, ПФ 7 может быть опущен.
Сигнал ПЧ, выведенный из ПФ 7, вводится в усилитель 8 ПЧ и усиливается усилителем 8 ПЧ. Сигнал ПЧ, усиленный усилителем 8 ПЧ, вводится в фильтр 9 нижних частот (ФНЧ, LPF). ФНЧ 9 имеет предопределенную частоту среза и пропускает частотную составляющую сигнала ПЧ ниже частоты среза. Сигнал ПЧ, проходящий через ФНЧ 9, вводится в усилитель 10, имеющий функцию автоматической регулировки усиления (АРУ, AGC). Усилитель 10 усиливает входной сигнал ПЧ при регулировке усиления, так что усиленный сигнал ПЧ может иметь предопределенную амплитуду. Усилитель 10 выводит усиленный сигнал ПЧ в аналого-цифровой (A/D) преобразователь 11. Аналого-цифровой преобразователь 11 выполняет аналого-цифровое преобразование посредством выборки входного сигнала ПЧ с предопределенной частотой выборки, тем самым преобразуя сигнал ПЧ в цифровой сигнал. Сигнал ПЧ, оцифрованный аналого-цифровым преобразователем 11, вводится в настраиваемый фильтр 12.
Настраиваемый фильтр 12 является полосовым фильтром, сформированным цифровым фильтром, таким как фильтр с конечной импульсной характеристикой (КИХ, FIR), фильтр с бесконечной импульсной характеристикой (БИХ, IIR) или каскадированный интегрирующий гребенчатый (CIC) фильтр. Центральная частота и ширина полосы пропускания настраиваемого фильтра 12 могут настраиваться согласно сигналу управления, принимаемому из вычислителя 20 местоположения.
В качестве альтернативы, например, настраиваемый фильтр 12 может быть образован комплектом устройства преобразования Фурье и устройства обратного преобразования Фурье вместо такого цифрового фильтра. В случае, где комплект устройства преобразования Фурье и устройства обратного преобразования Фурье используется в качестве настраиваемого фильтра 12, энергетический спектр, который должен блокироваться на частотах, формируемых устройством преобразования Фурье, замещается нулем. Энергетический спектр, скорректированный подстановкой нуля, преобразуется обратным преобразованием Фурье посредством устройства обратного преобразования Фурье, так что цифровой сигнал ПЧ может иметь частотные составляющие только в требуемой полосе частот. Когда комплект устройства преобразования Фурье и устройства обратного преобразования Фурье используется в качестве настраиваемого фильтра 12, объем расчетов увеличивается, но настраиваемый фильтр 12 может иметь крутую характеристику затухания на частоте среза.
Сигнал ПЧ, отфильтрованный настраиваемым фильтром 12, вводится в вычислитель 20 местоположения. Вычислитель 20 местоположения включает в себя секцию 21 корреляции и секцию 22 измерения SNR.
Хотя не показано на чертежах, секция 21 корреляции включает в себя часть корреляции несущей и часть корреляции кода. Часть корреляции несущей имеет генератор с числовым управлением (NCO), который генерирует тактовый сигнал при управлении частотой и фазой тактового сигнала. В части корреляции несущей входной цифровой сигнал ПЧ умножается на тактовый сигнал, генерируемый посредством NCO. Хотя не показано на чертежах, NCO управляется центральным процессорным устройством (ЦПУ, CPU) вычислителя 20 местоположения таким образом, что частота и фаза тактового сигнала, сформированного посредством NCO, могут быть равными частоте несущей волны входного цифрового сигнала ПЧ. Таким образом, частотная составляющая несущей волны удаляется из выходного сигнала части корреляции несущей. Выходной сигнал части корреляции несущей подается в часть корреляции кода.
Хотя не показано на чертежах, часть корреляции кода включает в себя генератор кода и генератор с числовым управлением (NCO). Генератор кода генерирует псевдослучайный код на основании тактовой частоты кода, сформированной посредством NCO. Сформированный псевдослучайный код эквивалентен коду, используемому для модуляции спутникового сигнала целевого спутника, который должен быть захвачен. В части корреляции кода псевдослучайный код, сформированный генератором кода, умножается на выходной сигнал части корреляции несущей. Выходной сигнал части корреляции кода вводится в ЦПУ, а ЦПУ управляет NCO и генератором кода таким образом, что частота и фаза псевдослучайного кода могут быть равными таковым у выходного сигнала части корреляции несущей. В таком подходе сигнал, содержащий навигационные данные, может приниматься каналом приема приемника 1. ЦПУ извлекает навигационные данные, содержащие информацию о времени спутниковых часов и информацию о местоположении спутника (эфемеридные данные) из сигнала, принятого каналом управления. Кроме того, ЦПУ рассчитывает псевдодальность для спутника на основании навигационных данных и выполняет расчет определения местоположения на основании псевдодальностей до четырех или более спутников.
Например, целевой спутник может определяться на основании того обстоятельства, что имеется корреляция, когда поочередно генерируются соответствующие спутникам коды. В другом примере целевой спутник может определяться на основании результата частотного анализа сигналов, принятых заранее. В еще одном примере спутник, который может быть захвачен, может оцениваться на основании орбиты спутника, текущего местоположения, текущего времени, и, в таком случае, целевой спутник может определяться на основании результата оценки.
Как упомянуто ранее, вычислитель 20 местоположения дополнительно включает в себя секцию 22 измерения SNR. Секция 22 измерения SNR принимает выходной сигнал секции 21 корреляции и рассчитывает отношение сигнал/шум (SNR) посредством расчета отношения между значением выходного сигнала, полученного, когда имеется корреляция между соответствующим целевому спутнику кодом и псевдослучайным кодом, и значением выходного сигнала, полученного, когда нет корреляции между соответствующим кодом и псевдослучайным кодом. Затем, вычислитель 20 местоположения ограничивает полосу пропускания настраиваемого фильтра 12 на основании частоты несущей волны спутникового сигнала с целевого спутника и отношения сигнал/шум, рассчитанного секцией 22 измерения SNR.
В состоянии, где есть только тепловой шум без помеховой волны, отношение сигнал/шум увеличивается по мере того, как полоса пропускания настраиваемого фильтра 12 увеличивается от центра частоты несущей волны сигнала приема. Причина для этого состоит в том, что, например, волновой сигнал L1 GPS имеет главный лепесток в центре частоты несущей волны и имеет боковой лепесток в предопределенных частотных интервалах, как показано на фиг.2. Однако, если помеховая волна существует в полосе пропускания настраиваемого фильтра 12, отношение сигнал/шум уменьшается (ухудшается) вследствие влияния помеховой волны.
Поэтому, согласно варианту осуществления, ограничение полосы, пригодное для уменьшения влияния помеховой волны, выполняется посредством настройки полосы пропускания настраиваемого фильтра 12 таким образом, что отношение сигнал/шум может становиться максимальным. Настройка полосы пропускания настраиваемого фильтра 12 подробно описана ниже.
Фиг.3 - блок-схема последовательности операций способа, иллюстрирующая процедуру для настройки полосы пропускания настраиваемого фильтра 12. Процедура начинается на S100, где определяется целевой спутник, который должен быть захвачен. Затем процедура переходит на S110, где определяется центральная частота полосы пропускания настраиваемого фильтра 12, которая соответствует частоте несущей волны спутникового сигнала с целевого спутника. На S110 также определяется начальная ширина полосы (диапазон) для полосы пропускания настраиваемого фильтра 12. Таким образом, настраиваемый фильтр 12 пропускает частотную составляющую только в пределах начальной ширины полосы по отношению к центральной частоте.
Затем процедура переходит на S120, где отношение сигнал/шум измеряется (рассчитывается) на основании выходного сигнала секции 21 корреляции. Затем процедура переходит на S130, где определяется, является ли отношение сигнал/шум, рассчитанное на текущий момент времени, большим или меньшим, чем предыдущее отношение сигнал/шум, рассчитанное в предыдущий момент времени. Если определено, что текущее отношение сигнал/шум является большим, чем предыдущее отношение сигнал/шум, в соответствии с «Нет» на S130, процедура переходит на S140. Следует отметить, что, когда процедура переходит с S120 на S130 в первый раз (то есть, когда нет предыдущего отношения сигнал/шум), процедура всегда переходит на S140.
На S140 полоса пропускания настраиваемого фильтра 12 увеличивается на предопределенную ширину полосы. После S140 процедура возвращается на S120, так что S120 и S130 могут повторяться для наблюдения изменения отношения сигнал/шум.
При таком подходе полоса пропускания настраиваемого фильтра 12 непрерывно увеличивается, когда отношение сигнал/шум повышается с увеличением полосы пропускания настраиваемого фильтра 12. Затем, в результате увеличения полосы пропускания настраиваемого фильтра 12, когда помеховая волна существует в полосе пропускания настраиваемого фильтра 12, как показано на фиг.4A, отношение сигнал/шум резко уменьшается, как показано на фиг.4B.
Поэтому, если определено, что существующее отношение сигнал/шум является меньшим, чем предыдущее отношение сигнал/шум, в соответствии с «Да» на S130, процедура переходит на S150. На S150 настраиваемый фильтр 12 настраивается на полосу пропускания непосредственно перед уменьшением отношения сигнал/шум. Следовательно, полоса пропускания настраиваемого фильтра 12 становится максимальной таким образом, что помеховой волны не существует в полосе пропускания настраиваемого фильтра 12.
Вариант осуществления, описанный выше, может быть модифицирован различными способами, например, как изложено ниже.
В варианте осуществления настраиваемый фильтр 12 в качестве цифрового фильтра соединен с выходной стороной аналого-цифрового преобразователя 11 и настраиваются центральная частота и ширина полосы пропускания настраиваемого фильтра 12. В качестве альтернативы, могут настраиваться центральные частоты и ширины полос пропускания ПФ 4 и ПФ 7 в качестве аналогового фильтра, так что ПФ 4 и ПФ 7 могут пропускать частотные составляющие целевых спутниковых сигналов наряду с предотвращением помеховой волны.
В варианте осуществления приемник 1 сконфигурирован для приема волновых сигналов L1 у GPS и GLONASS. В качестве альтернативы, приемник 1 может быть сконфигурирован для приема сигнала другой полосы частот, такого как волновой сигнал L2.
В варианте осуществления, как показано на фиг. 4B, полоса пропускания настраиваемого фильтра 12 настраивается таким образом, что отношение сигнал/шум может иметь максимальное значение MAX. В качестве альтернативы, полоса пропускания настраиваемого фильтра 12 может настраиваться таким образом, что отношение сигнал/шум может превышать предопределенное пороговое значение TH, меньшее чем максимальное значение MAX, зависящее от предполагаемого использования. Предопределенное пороговое значение TH соответствует требуемой минимальной чувствительности приема. При таком подходе непредвиденные внешние помеховые волны могут предотвращаться при обеспечении требуемой минимальной чувствительности приема.
Такие изменения и модификации должны пониматься как находящиеся в пределах объема настоящего изобретения, который определен прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ УДАЛЕННОГО УСТРОЙСТВА | 2004 |
|
RU2357267C2 |
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ВЫБОР ПОРОГОВОГО ЗНАЧЕНИЯ И УСИЛЕНИЯ ДЛЯ СПУТНИКОВОГО НАВИГАЦИОННОГО ПРИЕМНИКА | 2006 |
|
RU2417381C2 |
| ПРИЕМНИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СЕТЕЙ СПУТНИКОВОЙ СВЯЗИ | 1996 |
|
RU2158935C2 |
| Высокочувствительный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2017 |
|
RU2656998C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| АРХИТЕКТУРА ОБРАБОТКИ СИГНАЛОВ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2417382C2 |

Изобретение относится к приемнику для приема радиочастотного сигнала. Техническим результатом является минимизация влияния помеховой волны. Приемник для приема радиочастотного сигнала включает в себя полосовой фильтр, вычислитель и регулятор. Полосовой фильтр имеет настраиваемую полосу пропускания и пропускает принятый радиочастотный сигнал в пределах полосы пропускания для генерации отфильтрованного сигнала. Вычислитель вычисляет отношение сигнал/шум принятого радиочастотного сигнала на основании отфильтрованного сигнала. Регулятор (20) настраивает полосу пропускания фильтра таким образом, что рассчитанное отношение сигнал/шум становится максимальным. 6 з.п. ф-лы, 5 ил.
1. Приемник для приема радиочастотного сигнала, приемник содержит:
полосовой фильтр (12), имеющий настраиваемую полосу пропускания и сконфигурированный для пропускания принятого радиочастотного сигнала в пределах полосы пропускания для генерации отфильтрованного сигнала,
вычислитель (20), сконфигурированный для вычисления отношения сигнал/шум принятого радиочастотного сигнала на основании отфильтрованного сигнала; и
регулятор (20), сконфигурированный для настройки полосы пропускания полосового фильтра (12) таким образом, что вычисленное отношение сигнал/шум становится максимальным.
2. Приемник по п.1, в котором
регулятор (20) непрерывно увеличивает полосу пропускания полосового фильтра (12) от центра частоты несущей волны радиочастотного сигнала до тех пор, пока вычисленное отношение сигнал/шум не уменьшится, и
когда вычисленное отношение сигнал/шум уменьшается, регулятор (20) устанавливает полосу пропускания полосового фильтра (12) в состояние непосредственно перед тем, как вычисленное отношение сигнал/шум начинает уменьшаться.
3. Приемник по п.2, в котором
радиочастотный сигнал содержит множество разных типов радиочастотных сигналов, имеющих разные частоты,
регулятор (20) определяет центральную частоту полосы пропускания полосового фильтра (12) на основании типа принятого радиочастотного сигнала, и
регулятор (20) увеличивает полосу пропускания полосового фильтра (12) по отношению к центральной частоте.
4. Приемник по п.1, в котором
радиочастотный сигнал модулирован первым кодом при передаче, и вычислитель (20) вычисляет отношение сигнал/шум с использованием значения сигнала, полученного демодуляцией отфильтрованного сигнала первым кодом, и сигнала, полученного демодуляцией отфильтрованного сигнала вторым кодом, отличным от первого кода.
5. Приемник по любому из пп.1-4, при этом радиочастотный сигнал передается со спутника.
6. Приемник по п.1, в котором полосовой фильтр (12) является цифровым фильтром.
7. Приемник по п.6, в котором цифровой фильтр является фильтром с конечной импульсной характеристикой (FIR), фильтром с бесконечной импульсной характеристикой (IIR), каскадным интегрирующим гребенчатым (CIC) фильтром или фильтром с набором из устройства преобразования Фурье и устройства обратного преобразования Фурье.
| БУГА Н.Н | |||
| и др | |||
| РАДИОПРИЕМНЫЕ УСТРОЙСТВА | |||
| - М.: РАДИО И СВЯЗЬ, 1986, с.217-219 | |||
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

