ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем случае, к измерениям с дискретизацией сигнала, которые подвержены помехам, и, в частности, к выбору порогового значения и к дискретизации для обеспечения улучшенного функционирования спутникового навигационного приемника при наличии сигналов помех в глобальной спутниковой навигационной системе, ГСНС (GNSS).
УРОВЕНЬ ТЕХНИКИ
В приемниках глобальной спутниковой навигационной системы (ГСНС), такой как, например, Глобальная система определения местоположения (GPS), используют средства измерения расстояния, которые основаны на навигационных сигналах прямой видимости, широковещательную передачу которых осуществляют со спутников. Приемник измеряет время прихода одного или большего количества широковещательных сигналов. Это измерение времени прихода сигнала содержит операцию измерения времени на основании участка сигнала, закодированного кодом грубого определения местоположения объектов (coarse acquisition, C/A), именуемого псевдодальностью, и операцию измерения фазы.
Наличие сигналов помех может ухудшать отношение сигнал-шум (ОСШ) одного или большего количества навигационных сигналов ГСНС. На Фиг.2 проиллюстрированы помехи 200 от незатухающих волн (CW). Помехи 200 от незатухающих волн могут рассматриваться как сигнал помехи, в этом случае - синусоидальный сигнал, наложенный на сигнал 210 с разнесением по спектру, используемый в соответствующем сигнале ГСНС. Перед выполнением корреляции сигнала 210 с разнесением по спектру в приемнике амплитуда сигнала помехи часто является значительно большей, чем амплитуда сигнала 210 с разнесением по спектру. При корреляции выполняют обращение разнесения энергии сигнала ГСНС по спектру и разнесение энергии сигнала помехи по спектру, который, следовательно, становится шумоподобным. Если дополнительный шум от сигнала помехи, для которого выполнено обращение разнесения по спектру, является большим, чем фоновый тепловой шум 212 окружающей среды, то ОСШ принятого сигнала ГСНС уменьшается.
ОСШ сигнала ГСНС изменяется при изменении локальной амплитуды сигнала помехи. Кроме того, фоновый тепловой шум 212 маскирует сигнал 210 с разнесением по спектру. Однако, когда сигнал 210 с разнесением по спектру является дискретизированным, то его легче зарегистрировать в максимумах и минимумах сигнала помехи, где скорость изменения сигнала помехи почти равна нулю. Сигнал 210 с разнесением по спектру сложнее распознать в максимуме величины скорости изменения сигнала помехи.
В одном из обычных подходов для защиты от помех была использована трехуровневая дискретизация 214 на основании амплитуды сигнала помехи, при этом во время обработки сигналов в приемнике используют выборки вблизи максимумов и минимумов сигнала помехи. Выборкам, попадающим на максимумы, количество которых составляет от 10% до 20% от всех выборок, присваивают весовые коэффициенты, равные +1, а выборкам, попадающим на минимумы, количество которых составляет от 10% до 20% от всех выборок, присваивают весовые коэффициенты, равные -1. Остальные выборки не учитывают, присваивая им весовые коэффициенты, равные 0.
Однако в этом обычном подходе к решению проблемы регистрации с защитой от помех могут возникать затруднения в получении желательных совокупностей выборок. Следовательно, существует потребность в создании усовершенствованной схемы регистрации с защитой от помех в приемниках глобальной спутниковой навигационной системы (ГСНС).
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Описано спутниковое навигационное устройство, содержащее универсальный (гибкий) радиочастотный (РЧ) приемник. Приемник принимает сигнал, содержащий, по меньшей мере, первый сигнал с разнесением по спектру из первого спутника. Приемник имеет первый канал, содержащий аналого-цифровой преобразователь (АЦП), предназначенный для выборки и дискретизации сигнала, и схему автоматической регулировки усиления (АРУ), предназначенную для регулировки усиления сигнала. Аналого-цифровой преобразователь имеет первое не равное нулю пороговое значение дискретизации и второе не равное нулю пороговое значение дискретизации. Схема АРУ регулирует усиление в соответствии с первым не равным нулю пороговым значением дискретизации, создавая первую заранее заданную вероятность P 1 наличия выборки, не равной нулю. Второе не равное нулю пороговое значение дискретизации может соответствовать второй заранее заданной вероятности P2 наличия выборки, не равной нулю. Сигнал усиливают с использованием коэффициента усиления и выполняют его дискретизацию с использованием второго не равного нулю порогового значения дискретизации для уменьшения влияния сигнала помех на приемник при произвольном отношении мощности сигнала помех к мощности шума приемника.
Аналого-цифровой преобразователь может производить вывод диапазона значений, соответствующих 2, 3, 4 или 5-битовой дискретизации. Первое не равное нулю пороговое значение дискретизации соответствует первому диапазону выходных значений, а второе не равное нулю пороговое значение дискретизации соответствует второму диапазону выходных значений. В аналого-цифровом преобразователе также может быть использована справочная таблица, содержащая первое соответствие и второе соответствие, при этом не равные нулю выборки в первом соответствии определяют на основании первого не равного нулю порогового значения дискретизации, а не равные нулю выборки во втором соответствии определяют на основании второго не равного нулю порогового значения дискретизации.
Первый канал может содержать схему коррекции смещения постоянной составляющей, предназначенную, по существу, для уменьшения смещения постоянной составляющей в сигнале. Приемник также может содержать схему гашения, которая суммирует несколько событий, когда соответствующая выборка сигнала превышает пороговое значение в течение некоторого промежутка времени и, по меньшей мере, временно отключает приемник в том случае, если количество событий превышает некоторое значение. Этим пороговым значением может являться значение, в восемь раз превышающее первое не равное нулю пороговое значение дискретизации. Приемник может быть повторно включен после того, как количество событий является меньшим, чем это значение.
Первый канал может содержать схему преобразования с понижением частоты, которая осуществляет преобразование сигнала из сигнала первой несущей частоты в сигнал в полосе частот, близкой к полосе частот исходных сигналов. Сигнал в полосе частот, близкой к полосе частот исходных сигналов, содержит сигнал второй несущей частоты, по существу, меньшей, чем одна четверть частоты выборки. Приемник также может содержать схему фазовращателя, предназначенную для выполнения вращения фазы в комплексной области для дискретизированных квадратурных выборок сигнала в полосе частот, близкой к полосе частот исходных сигналов, таким образом, чтобы остаточная погрешность была, по существу, равномерно распределенной по фазовым углам от 0 до 360° и, следовательно, чтобы ее среднее значение было, по существу, равным нулю в интервале интегрирования, соответствующем первому сигналу с разнесением по спектру. В схеме фазовращателя может использоваться справочная таблица для выполнения вращения фазы в комплексной области.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные задачи и отличительные признаки настоящего изобретения станут более очевидными из приведенного ниже подробного описания и из прилагаемой формулы изобретения при их рассмотрении совместно с чертежами, на которых изображено следующее:
На Фиг.1 изображена схема, на которой проиллюстрирована глобальная спутниковая навигационная система (ГСНС) с сигналами, прошедшими по прямому пути, и с сигналом многолучевого распространения.
На Фиг.2 проиллюстрированы помехи от незатухающих волн (CW) в сигнале с разнесением по спектру.
На Фиг.3A изображена блок-схема, на которой проиллюстрированы компоненты в канале приемника ГСНС.
На Фиг.3Б изображена блок-схема, на которой проиллюстрированы компоненты в канале приемника ГСНС.
На Фиг.4 изображена блок-схема, на которой проиллюстрирована обработка принятых сигналов в приемнике ГСНС.
На Фиг.5 проиллюстрировано распределение совокупности выборки.
На Фиг.6 изображен график зависимости вычисленного ухудшения отношения сигнал/шум (ОСШ) на выходе от мощности сигнала помехи от незатухающих волн.
На Фиг.7 изображен график, на котором приведено сравнение вычисленного ухудшения ОСШ на выходе как функции сигнала помехи от незатухающих волн для теоретического оптимума и варианта осуществления подхода с регистрации защит от помех.
На Фиг.8 изображена блок-схема, на которой проиллюстрирована схема гашения.
На Фиг.9 изображена блок-схема, на которой проиллюстрирована схема привязки по времени.
На Фиг.10 изображена блок-схема, на которой проиллюстрирована схема запуска и остановки.
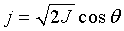
На Фиг.11 изображена блок-схема, на которой проиллюстрирован генератор несущей с цифровым управлением, ГЦУ (NCO).
На Фиг.12 изображена блок-схема, на которой проиллюстрированы компоненты приемника ГСНС.
На Фиг.13 изображена схема последовательности операций, на которой проиллюстрирован способ действия приемника ГСНС.
На Фиг.14 изображена блок-схема, на которой проиллюстрирована схема коррекции смещения постоянной составляющей в приемнике ГСНС.
На Фиг.15 изображена блок-схема, на которой проиллюстрирована схема автоматической регулировки усиления (АРУ) в приемнике ГСНС.
Аналогичные номера позиций относятся к аналогичным элементам на нескольких из всех чертежей.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведена ссылка на варианты осуществления изобретения, примеры которых проиллюстрированы на сопроводительных чертежах. В приведенном ниже подробном описании изложены многочисленные конкретные подробности для обеспечения глубокого понимания настоящего изобретения. Однако для обычного специалиста в данной области техники очевидно, что настоящее изобретение может быть реализовано на практике без этих конкретных подробностей. В других случаях подробное описание известных способов, процедур, компонентов и схем не приведено, чтобы не затруднять понимание особенностей вариантов осуществления изобретения из-за излишних подробностей.
Описано спутниковое навигационное устройство, содержащее универсальный (гибкий) РЧ-приемник, предназначенный для приема одного или большего количества сигналов с разнесением по спектру из первого спутника, который имеет улучшенные характеристики защиты от помех. Варианты осуществления приемника обеспечивают прием сигнала, содержащего, по меньшей мере, первый сигнал с разнесением по спектру из первого спутника. Приемник имеет первый канал, содержащий аналого-цифровой преобразователь (АЦП), предназначенный для выборки и дискретизации сигнала, и схему автоматической регулировки усиления (АРУ), предназначенную для регулировки усиления сигнала. Аналого-цифровой преобразователь имеет первое не равное нулю пороговое значение дискретизации, соответствующее первой заранее заданной вероятности P 1 не нулевой выборки, которую также именуют первой активностью, и второе не равное нулю пороговое значение дискретизации, соответствующее второй заранее заданной вероятности P2 наличия не нулевой выборки, которую также именуют второй активностью. Схема АРУ может регулировать усиление в соответствии с первым не равным нулю пороговым значением дискретизации. Сигнал может быть усилен с использованием коэффициента усиления и дискретизирован с использованием второго не равного нулю порогового значения дискретизации для уменьшения влияния мешающего сигнала или сигнала помех на приемник при произвольном отношении мощности сигнала помех к мощности шума приемника. Путем управления статистикой выборок вместо регулирования амплитуды сигнала и путем полезного использования некоторых случайных статистических свойств гауссова шума и сигналов с помехами приемник позволяет получать желательные совокупности выборок и, следовательно, достигнуть улучшенных характеристик защиты от помех.
В вариантах осуществления спутникового навигационного устройства подразумевают, что термин "навигация" включает в себя определение местонахождения или позиции, что также известно как определение местоположения. Термин "навигация" следует интерпретировать как определение того, где именно находится спутниковое навигационное устройство относительно системы отсчета, которая, по меньшей мере, частично обеспечена спутниками в глобальной спутниковой навигационной системе (ГСНС). При навигации также может производиться определение времени в спутниковом навигационном устройстве, по меньшей мере, частично, по сигналам из одного или из большего количества спутников в ГНСС. Глобальными спутниковыми навигационными системами (ГСНС) являются в том числе Глобальная система определения местоположения (GPS), Глобальная орбитальная навигационная спутниковая система (ГЛОНАСС), система определения местоположения GALILEO, Европейская геостационарная система навигационного покрытия (EGNOS), Система расширенного района приема дифференциальных поправок (WAAS), Многофункциональная спутниковая система приема дифференциальных поправок для транспорта (MSAS), Квазизенитная спутниковая система (QZSS), так же как сеть StarFire фирмы "NavCom Technology, Inc.", но эти примеры не являются ограничивающим признаком.
За исключением системы ГЛОНАСС спутники ГСНС используют способы множественного доступа с кодовым разделением (МДКР) для уменьшения межспутниковых помех. Спутники, не входящие в состав системы ГЛОНАСС, осуществляют широковещательную передачу сигналов на несущих частотах сигнала в L диапазоне частот и используют псевдослучайные коды разнесения сигнала по спектру. В системе ГЛОНАСС для обеспечения защиты от межспутниковых помех используют множественный доступ с частотным разделением (МДЧР). Каждый спутник системы ГЛОНАСС использует один и тот же код разнесения сигнала по спектру. За исключением диаметрально противоположных спутников, расположенных на одной и той же орбите на противоположных сторонах Земли, каждый спутник имеет свой собственный диапазон частот. Диаметрально противоположные спутники могут совместно использовать один и тот же диапазон частот.
Используя Глобальную систему определения местоположения (GPS) в качестве примера, спутники осуществляют широковещательную передачу навигационных сигналов на несущей частоте L1 сигнала, равной 1575,42 МГц, и на несущей частоте L2 сигнала, равной 1227,6 МГц. Запланирована передача третьего сигнала системы GPS на несущей частоте L5 сигнала, равной 1176,45 МГц. В системе GALILEO запланировано предоставление сигналов на частотах L1 и L5 (также именуемых E5A) и дополнительных сигналов на частотах 1207,14 МГц (E5B) и 1278,75 МГц (E6). Система GALILEO также будет предоставлять дополнительные сигналы с различными кодами разнесения сигнала по спектру на несущей частоте L1 сигнала. В системе QZSS планируют предоставлять сигналы, совместимые с системой GPS, на несущих частотах L1, L2 и L5 сигнала. В системе QZSS также планируют предоставлять сигналы на пока еще не определенной несущей частоте L6 сигнала. Спутники в системах WAAS, EGNOS и MSAS предоставляют сигналы, подобные сигналам системы GPS, на несущей частоте L1 сигнала, и запланировано предоставление второго сигнала на несущей частоте L5 сигнала.
В сети StarFire, которая функционирует, по меньшей мере, частично в качестве линии связи, используют каналы шириной 840 Гц в диапазоне частот между 1525 МГц и 1560 МГц. Сеть StarFire обеспечивает передачу данных со скоростью 1200 закодированных битов в секунду.
В системе ГЛОНАСС широковещательную передачу сигналов осуществляют в диапазонах частот от 1598,0635 МГц до 1605,375 МГц (L1) и от 1242,9375 до 1248,625 МГц (L2). Диапазоны частот сигналов в системе ГЛОНАСС перекрывают высокочастотную часть соответствующих диапазонов частот сигналов в системах GPS и GALILEO.
На Фиг.1 проиллюстрирован составной сигнал, принимаемый устройством 110 в одном из вариантов осуществления ГСНС 100. Этот составной сигнал содержит один или большее количество сигналов 114, широковещательную передачу которых производит один или большее количество спутников, а также сигнал 116 многолучевого распространения, отраженный от объекта 112. Как описано выше, каждый из сигналов 114 содержит, по меньшей мере, один сигнал с разнесением по спектру, соответствующий, по меньшей мере, одному спутнику.
На Фиг.3A проиллюстрированы компоненты в одном из вариантов осуществления схемы 300 подканала в первом канале приемника в устройстве 110 (Фиг.1). Прием составного сигнала осуществляет входная схема, содержащая одну или большее количество антенн. Входные сигналы из антенны могут быть усилены или не усилены (пассивный режим), и в маршрутизаторе, имеющемся во входной схеме, может быть выполнено объединение одной или множества частот для каждого антенного соединителя. В вариантах осуществления изобретения с антенной без усиления или с наличием длинного соединителя или кабеля между антенной и маршрутизатором входная схема может содержать каскад первичного усиления. По меньшей мере, часть составного сигнала 310 направляют в один или в большее количество каналов. Каждый из каналов содержит одну или большее количество схем подканалов, например, схему 300 подканала. Схема 300 подканала производит прием соответствующей полосы диапазона частот, по меньшей мере, в одном сигнале с разнесением по спектру, соответствующем, по меньшей мере, первому спутнику в по меньшей мере части составного сигнала 310.
Составной сигнал 310 подают в фильтр 312 с низким уровнем потерь, предназначенный для того, чтобы не пропускать зеркальные сигналы и внеполосные помехи. Перед подачей сигнала в фильтр 312 он также может быть усилен в усилителе (на чертеже не показан) и/или отфильтрован в фильтре (на чертеже не показан). В вариантах осуществления изобретения с наличием первичного малошумящего усилителя во входных электронных схемах это усиление может отсутствовать. Выполняют преобразование, по меньшей мере, части сигнала с понижением частоты до промежуточной частоты (ПЧ) с использованием одного или большего количества модуляторов, например, смесителя 314. В некоторых вариантах осуществления изобретения ПЧ является общей для одного или большего количества схем дополнительных подканалов. При преобразовании с понижением частоты в смесителе 314 подмешивают первый опорный сигнал, имеющий соответствующую первую несущую частоту или частоту первого гетеродина (LO), генерация которого осуществлена генератором 318 сигнала.
Генерация первого опорного сигнала может быть осуществлена на основании одного или большего количества тактовых сигналов, которые могут быть сгенерированы генератором 316 опорной частоты. Каждая схема подканала в приемнике имеет уникальную первую частоту гетеродина, посредством которой соответствующей схеме подканала, такой как схема 300 подканала, разрешают принимать соответствующую полосу частот, по меньшей мере, в одном сигнале с разнесением по спектру из первого спутника. Схемы подканала могут принимать один или большее количество тактовых сигналов, по меньшей мере, из одного общего генератора опорной частоты, имеющегося в приемнике. В других вариантах осуществления изобретения общий генератор опорной частоты может отсутствовать. Генератор 316 опорной частоты может содержать одну или большее количество схем фазовой автоподстройки частоты, схем автоматической подстройки по задержке и/или схем интерполяции.
После преобразования с понижением частоты сигнал на промежуточной частоте (ПЧ) проходит через фильтр 320 с высокой добротностью, такой как фильтр на поверхностных акустических волнах, который предотвращает наложение сигналов и появление сигналов помех и не пропускает внеполосные помехи. Наличие фильтра 320 с высокой добротностью может позволить, чтобы другие фильтры в канале 300, например, выполняющие предварительную селективную фильтрацию на входе, имели более низкую точность, может позволить проще реализовать схему 330 автоматической регулировки усиления (АРУ) и может также позволить выполнять дискретизацию с меньшим количеством битов в аналого-цифровых преобразователях 338. Фильтры в схемах подканалов, например фильтр 320, определяют ширину полосы частот обработки сигналов для сигнала в приемнике. Вследствие этого эти фильтры, например фильтр 320, помогают определить общие характеристики обработки сигналов в приемнике. В некоторых вариантах осуществления изобретения фильтры, например фильтр 320, могут иметь центральную частоту, по существу, равную ПЧ, и ширину полосы пропускания большую, чем ширина полосы частот, приблизительно равная ширине полосы частот первого спутника. В некоторых вариантах осуществления изобретения ширина полосы пропускания (полоса пропускания на уровне 3 дБ) одного или большего количества фильтров, например фильтра 320, может быть большей, чем, приблизительно, 30 МГц (с двух сторон). В некоторых вариантах осуществления изобретения ширина полосы пропускания (полоса пропускания на уровне 3 дБ) одного или большего количества фильтров, например, фильтра 320, может находиться в пределах диапазона частот от, приблизительно, 30 МГц до, приблизительно, 32 МГц включительно (с двух сторон). В варианте осуществления изобретения, который приведен в качестве примера, фильтр 320 может быть эквивалентным 6 или большему количеству комплексных полюсов. Для подканала, соответствующего сигналам из сети StarFire, фильтр 320 также может иметь центральную частоту, по существу, равную ПЧ. Однако в этом случае ширина полосы пропускания фильтра 320 может быть равной 200 кГц, так как сигнал в сети StarFire использует меньшую ширину полосы частот.
Путем обеспечения того, что ширина полосы пропускания фильтров, например, фильтра 320, является, по меньшей мере, незначительно большей, чем фильтрация, применяемая для вещаемых сигналов одним или более спутниками ГСНС, не происходит потерь содержимого сигнала и обеспечивается подавление внеполосных помех в максимально возможной степени. Если ширина полосы пропускания фильтров в одном или большем количестве спутников будет увеличена в будущем, то ширина полосы пропускания одного или большего количества фильтров, например фильтра 320, также может быть увеличена для того, чтобы не происходило потерь содержимого сигнала. Это может обеспечить возможность улучшенной коррекции сигнала 116 многолучевого распространения (Фиг.1) и/или улучшенные характеристики слежения для приемника.
Преобразование сигнала в одной или в большем количестве схем подканалов, например, в схеме 300 подканала, в сигнал в полосе частот, по существу, близкой к полосе частот исходных сигналов (нулевая частота), осуществляют с использованием одного или большего количества модуляторов, например, смесителей 322. При преобразовании с понижением частоты в смесителях 322 подмешивают вторые опорные сигналы, каждый из которых имеет вторую частоту несущей или гетеродина, и которые являются по существу квадратурными друг к другу созданные генератором 324 квадратурных сигналов. Генерация второго опорного сигнала может быть осуществлена на основании, по меньшей мере, одного тактового сигнала из генератора 316 опорной частоты и/или из общего генератора опорной частоты. По существу, полоса частот, близкая к полосе частот исходных сигналов, может содержать частоты, по существу, меньшие, чем одна четверть частоты выборки в аналого-цифровых преобразователях 338. В некоторых вариантах осуществления изобретения полоса частот, по существу, близкая к полосе частот исходных сигналов, может содержать частоты, меньшие, чем, приблизительно, 100 кГц.
Преобразование с понижением частоты до полосы частот, по существу, близкой к полосе частот исходных сигналов, фактически вводит преднамеренный доплеровский сдвиг частоты. Один из способов реализации этого состоит в установке несущей частоты, по меньшей мере, одного тактового сигнала таким образом, чтобы она была выше, приблизительно, на 40 промилле (частей на миллион). Этот сдвиг обеспечивает то, что все I-выборки (синфазные) и Q-выборки (квадратурные) из аналого-цифровых преобразователей 338 имеют явный положительный доплеровский сдвиг частоты, что упрощает конструкцию генераторов сигналов, например, генераторов с цифровым управлением (ГЦУ), в схемах обработки сигналов, например, в устройстве 342 обработки сигналов. Этот сдвиг также обеспечивает то, что края цифровых выборок распределены по случайному закону относительно привязки во времени краев битов кода, по меньшей мере, в одном сигнале с разнесением по спектру, по меньшей мере, из первого спутника.
В вариантах осуществления изобретения, которые приведены в качестве примеров, генератор 316 опорной частоты имеет номинальную несущую частоту сигнала, равную 16,36864 МГц. Она является на 39,101 МГц или, приблизительно, на 40 промилле большей, чем основная частота Глобальной системы определения местоположения (GPS), равная 10,23 МГц, умноженная на коэффициент 1,6. Несущая частота, по меньшей мере, одного тактового сигнала из генератора 316 опорной частоты может изменяться в течение его времени существования еще на 10 промилле вследствие изменения характеристик в результате устаревания и/или изменений температуры. В других вариантах осуществления изобретения, которые приведены в качестве примеров, генератор 316 опорной частоты может содержать кварцевый генератор с термостабилизацией, КГТС (TCXO), и/или кварцевый генератор со стабилизацией по напряжению, КГСН (VCXO).
Промежуточная частота, первая частота гетеродина и вторая частота гетеродина могут сохранить когерентные зависимости между кодом и несущими частотами сигнала, используемыми в сигналах ГСНС. Для всех сигналов ГСНС на каждый бит кода приходится, по существу, целое число периодов несущей. Выбранные частоты преобразования с понижением частоты, то есть соответствующая первая частота гетеродина и соответствующая вторая частота гетеродина, могут сохранять эти зависимости. Однако следует отметить, что эти зависимости являются нечувствительными к доплеровским сдвигам частоты, вызванным движением спутник - приемник, опорным сигналом, ошибками в тактовом сигнале в спутнике или в приемнике, и/или к преднамеренному доплеровскому сдвигу частоты, рассмотренному выше. Как описано ниже, в приемнике целесообразно используют это свойство.
ПЧ и вторая частота гетеродина могут являться, по существу, идентичными частотами, кратными частоте, по меньшей мере, соответствующего тактового сигнала из общего генератора опорной частоты, имеющегося в приемнике, и/или из генератора 316 опорной частоты. Пренебрегая источниками доплеровского сдвига (которые упомянуты выше), сумма двух частот преобразования с понижением частоты, то есть соответствующей первой частоты гетеродина и второй частоты гетеродина, в каждой из схем подканалов может быть, по существу, равной соответствующей несущей частоте сигнала, которая соответствует соответствующему диапазону частот, по меньшей мере, в одном сигнале с разнесением по спектру из первого спутника. Например, диапазон частот L1 в Глобальной системе определения местоположения (GPS) имеет номинальную несущую частоту сигнала, равную 1575,42 МГц, которая эквивалентна 154·10,23 МГц. В тех вариантах осуществления изобретения, в которых приемник 200 (Фиг.2) использует тактовый сигнал из генератора 316 опорной частоты с частотой N1 ·10,23 МГц, генерацию первого и второго сигналов гетеродина осуществляют из этого тактового сигнала. Соответствующие частоты этих гетеродинов могут подчиняться нескольким зависимостям, которые гарантируют то, что диапазон, измеренный путем отслеживания несущей частоты, является, по существу, тем же самым, что и диапазон, измеренный путем отслеживания кода. Несущие частоты для каждого из сигналов L-диапазона могут также быть выражены в виде N0 ·154. (N0=154 для L1, 120 для L2, 115 для L5, 118 для E5A и 125 для E6). Частоту первого сигнала гетеродина создают путем умножения опорного тактового сигнала на A, то есть LO1=A·N1 ·10,23 МГц. Частота второго сигнала гетеродина, по существу, равна ПЧ, и ее создают путем умножения опорного тактового сигнала на B, то есть LO2=B·N1·10,23 МГц. Множители A и B выбраны таким образом, что они подчиняются следующей зависимости: s·(N0-A·N1)=B·N2, где s=1 для преобразования с понижением частоты при частоте гетеродина меньшей, чем центральная частота сигнала (low-side down conversion), и s=-1 для преобразования с понижением частоты при частоте гетеродина большей, чем центральная частота сигнала (high-side down conversion). Например, если для преобразования сигнала на частоте L1 в ПЧ, равную 13,7·10,23 МГц (=140 151 МГц), сначала используют преобразование с понижением частоты при частоте гетеродина большей, чем центральная частота сигнала, то значение s равно -1, а значение B·N1 равно 154+13,7 или 167,7. Если же вместо этого используют преобразование с понижением частоты при частоте гетеродина меньшей, чем центральная частота сигнала, то значение s равно 1, а значение B·N1 равно 154 - 13,7 или 140,3. Для каждой из частот ГСНС может быть использован различный множитель A. Одинаковая ПЧ и одинаковый множитель B могут использоваться для всех частот. Следует отметить, что, в некотором смысле, преобразование при частоте гетеродина большей, чем центральная частота сигнала, создает ПЧ с отрицательной частотой, но фильтры в приемнике и при последующих преобразованиях с понижением частоты работают одинаковым образом для положительных и отрицательных частот.
В одной или в большем количестве схем подканалов для сигналов из сети StarFire квадратурная регистрация (детектирование) может не использоваться. Частота второго сигнала гетеродина может быть отрегулирована ступенчато с шагом, приблизительно 21 Гц, для того чтобы частота второго сигнала гетеродина совпадала с центральной частотой канала связи StarFire. Контроллер в приемнике, схема первого канала и/или одна из схем подканалов, например схема 300 подканала, могут последовательно программировать генератор 324 сигнала на подходящие частоты, соответствующие каждому возможному диапазону частот StarFire, для обнаружения наличия соответствующего сигнала. Следует отметить следующее: при обработке сигналов StarFire может отсутствовать необходимость в поддержании особых зависимостей между кодом и несущими частотами сигнала, вследствие чего может иметься большая свобода выбора соответствующей частоты первого сигнала гетеродина и соответствующей частоты второго сигнала гетеродина.
После преобразования с понижением частоты до полосы частот, близкой к полосе частот исходных сигналов, синфазный сигнал и сигнал со сдвигом по фазе подают в фильтры 326 нижних частот для удаления нежелательных спектральных компонент. Сигналы усиливают на основании коэффициентов усиления, определенных с использованием схемы 330 АРУ, выборка и дискретизация которых выполнены в аналого-цифровых преобразователях 338, для создания синфазных I-выборок и Q-выборок со сдвигом по фазе. I-выборки и Q-выборки обрабатывают в устройстве 342 обработки сигналов. В устройстве 342 обработки сигналов могут быть использованы значения, хранящиеся в справочной таблице 344. Схема 330 АРУ и аналого-цифровые преобразователи 338 могут быть сконфигурированы и/или отрегулированы логическим устройством 334 управления с использованием значений, хранящихся в справочной таблице 336. Более подробное описание конфигурирования и/или выбора коэффициентов усиления и пороговых значений дискретизации для АЦП приведено ниже.
В некоторых вариантах осуществления изобретения ПЧ частота первого сигнала гетеродина и/или частота второго сигнала гетеродина в одном или в большем количестве схем подканалов, например в схеме 300 подканала, могут быть регулируемыми и/или конфигурируемыми. Это реализовано путем регулировки и/или путем изменения конфигурации, по меньшей мере, одного генератора сигнала, например генератора 318 сигнала, с использованием контроллера в приемнике, схемы первого подканала и/или одной из схем подканалов, например схемы 300 подканала. Например, может быть реализована ступенчатая регулировка частоты второго сигнала гетеродина в опорном сигнале из генератора 324 квадратурных сигналов с шагом в несколько сотен герц (Гц). При адаптации или реконфигурации ПЧ может быть выполнена регулировка или перестройка, по меньшей мере, одного из следующих элементов: фильтра 320, фильтров 326, смесителей 322 и/или смесителя 314. Следует отметить, что ранее описанная зависимость между кодом и несущей может быть сохранена для навигационных сигналов при изменении ПЧ. Для некоторых сигналов связи, например в StarFire, эта зависимость может быть сохранена или может быть не сохранена.
Посредством того, что обеспечена возможность перестройки ПЧ, частоты первого гетеродина и/или частоты второго гетеродина, ПЧ может быть перестроена таким образом, что принимает значение в диапазоне от, приблизительно, 100 МГц до, приблизительно, 350 МГц включительно. Варианты осуществления изобретения, в которых ПЧ, частота первого сигнала гетеродина и/или частота второго сигнала гетеродина являются регулируемыми, могут обеспечивать возможность динамической перестройки одной или большего количества схем подканалов на ПЧ в этом диапазоне, включая его крайние значения. Конфигурируемая или адаптируемая ПЧ предоставляет дополнительные степени свободы конструкции. Эти степени свободы могут предоставлять возможность изменения ПЧ в одном или в большем количестве подканалов для удовлетворения требованиям, предъявляемым компонентами, например, фильтрами 312, 320 и/или 326, генератором 318 сигнала, генератором 324 квадратурных сигналов и/или смесителями 314 и 322. Например, если во время срока службы приемника, установленного при его производстве, один или большее количество компонентов становятся устаревшими, или если становятся доступными один или большее количество более подходящих компонентов, соответствующих иному диапазону ПЧ, то ПЧ может быть изменена путем перестройки или адаптации частоты первого сигнала гетеродина и/или частоты второго сигнала гетеродина в одной или в большем количестве схем подканалов. В вариантах осуществления изобретения, которые приведены в качестве примеров, ПЧ может быть равной 140 МГц, 160 МГц и/или 200 МГц, так как эти значения могут соответствовать техническим условиям для дешевых фильтров и смесителей, которые были разработаны для телефонных аппаратов сотовой связи.
В других вариантах осуществления изобретения схема 300 подканала может иметь меньшее или большее количество компонентов. Функции двух или большего количества компонентов могут быть реализованы в одном компоненте. В альтернативном варианте функции некоторых компонентов могут быть реализованы в дополнительных экземплярах компонентов или в компонентах, расположенных в ином месте в приемнике. Несмотря на то что на Фиг.3A проиллюстрирована одна схема 300 подканала, в некоторых вариантах осуществления изобретения может содержаться большее количество схем подканалов. В некоторых вариантах осуществления изобретения в одной или в большем количестве схем подканалов может не использоваться квадратурное детектирование и выборка. Вместо этого сигнал может быть преобразован в полосу частот, близкую к полосе частот исходных сигналов, в одном или в большем количестве смесителей с использованием второго опорного сигнала, имеющего вторую несущую частоту или частоту гетеродина.
На Фиг.3Б проиллюстрирован вариант осуществления схемы 360 подканала. Вертикальная линия 362 соответствует схеме 346 детектирования, показанной на Фиг.3A. Для надлежащего функционирования схемы 360 подканала желательно наличие одинакового количества положительных и отрицательных выборок АЦП из аналого-цифровых преобразователей 338. Если среднее значение выборок, выполненных АЦП, не равно нулю, то они содержат смещение, также именуемое смещением постоянной составляющей, которое во время процесса (432 и 434 на Фиг.4) корреляции кода будет преобразовано в дополнительный мешающий шум, или если смещение постоянной составляющей является большим, чем автокорреляционная защита, обеспечиваемая соответствующим кодом разнесения сигнала по спектру, то оно проявляется в виде сигнала помех от спутников. Схемы 348 коррекции смещения постоянной составляющей регулируют синфазный сигнал и сигнал со сдвигом по фазе в полосе частот, близкой к полосе частот исходных сигналов, для уменьшения смещения постоянной составляющей в одном или в обоих этих сигналах.
Одним из подходов для устранения смещения постоянной составляющей является усреднение выборок, выполненных АЦП, за некоторый промежуток времени и в вычитании результирующего среднего значения из выборок, поступающих из АЦП. Однако в этом подходе может использоваться много битов точности в выборках АЦП с устраненным смещением и, следовательно, много битов точности во время обработки 342 сигналов. Другими способами являются, в том числе, ручная или программная калибровка смещений постоянной составляющей. В этих способах измеряют смещение постоянной составляющей и регулируют опорные напряжения АЦП или пороговые значения путем регулировки компонентов в схеме 360 подканала вручную или путем создания изменяемого напряжения обратной связи с использованием цифроаналогового преобразователя (ЦАП).
На Фиг.14 проиллюстрирован вариант осуществления схемы 1400, которую используют для устранения смещения постоянной составляющей. Схема 1400 необязательно инвертирует I-выборки 1410 и Q-выборки 1412 с использованием необязательных инверторов 1414. Реверсивные счетчики 1418 производят приращение своих соответствующих отсчетов на единицу в том случае, если выборка является положительной, и уменьшают их соответствующие отсчеты на единицу в том случае, если выборка является отрицательной. Если происходит переполнение одного из счетчиков 1418, то имеется избыток положительных выборок, поэтому на один вывод "смещение М" (Bias M) 1422 подают импульс, поступающий на неинвертирующий вход одного операционного усилителя 1426, и увеличивают одно опорное напряжение. Если в одном из счетчиков 1418 имеется потеря значимости, то имеется избыток отрицательных выборок, поэтому на один вывод "смещение P" (Bias P) 1424 подают импульс, поступающий на инвертирующий вход операционного усилителя 1426, и уменьшают одно опорное напряжение. Операционные усилители 1426 и связанные с ними схемы обратной связи выбраны таким образом, чтобы время интегрирования импульсов было в интервале от 100 мс (миллисекунд) до 10 c (секунд). С течением времени операционные усилители 1426 интегрируют импульсы обратной связи и регулируют опорные напряжения таким образом, чтобы количество положительных выборок было равно количеству отрицательных выборок и чтобы среднее значение I-выборок 1410 и Q-выборок 1412 было равно нулю.
Со ссылкой на Фиг.3A, имеется несколько вариантов осуществления аналого-цифровых преобразователей 338 для преобразования одного или большего количества сигналов ГСНС из аналогового вида в цифровой вид. В данной области техники известно, что приемлемой является соответствующая частота выборки сигналов, равная или большая, чем частота Найквиста (Nyquist). В тех вариантах осуществления изобретения, в которых используют комплексные выборки, частота выборки может быть большей, чем ширина полосы пропускания фильтров 326, или равной ей. Например, для сигналов Глобальной системы определения местоположения (GPS) частота выборки может быть большей, чем 32 МГц. В других вариантах осуществления изобретения, которые приведены в качестве примеров, частота выборки может быть равной 40, 60 или 80 МГц. Так как во время обработки сигналов потребляемая мощность и временные ограничения увеличиваются прямо пропорционально частоте выборки, то для существующих и запланированных сигналов ГСНС может быть пригодной частота выборки, равная 40 МГц. Если в будущем появятся сигналы ГСНС с большей шириной полосы частот, то ширина полосы пропускания фильтров 326 и частота выборки аналого-цифровых преобразователей 338 могут быть соответствующим образом увеличены исходя из новой частоты Найквиста.
В некоторых вариантах осуществления изобретения одна или большее количество схем подканалов, например, схема 300 подканала, в первом канале могут быть выполнены перестраиваемыми для обеспечения возможности вывода одного или большего количества цифровых сигналов, имеющих регулируемое или перестраиваемое количество битов. Количество битов может быть равным 1, 2, 3, 4, 5 или более, включая в себя однобитовую (двухуровневую) дискретизацию, двухбитовую (трехуровневую или, иными словами, "знак и величина", то есть 1, 0 и -1) дискретизацию, двухбитовую (четырехуровневую) дискретизацию и трехбитовую (восьмиуровневую) дискретизацию. В некоторых вариантах осуществления изобретения может использоваться большее количество битов. Однако сложность аналого-цифрового преобразователя, например аналого-цифровых преобразователей 338, изменяется пропорционально количеству битов в квадрате, и при увеличении количества свыше 5 может иметь место снижение эффекта. Изменение конфигурации или адаптация количества битов могут выполняться динамически. Управление этим изменением конфигурации или адаптацией может быть осуществлено контроллером в приемнике и/или контроллером, по меньшей мере, в одной из схем подканалов, например, в схеме 300 подканала. В тех вариантах осуществления изобретения, в которых одна или большее количество схем подканалов сконфигурированы таким образом, что осуществляют вывод цифровых сигналов, содержащих 1 бит, вместо одного или большего количества аналого-цифровых преобразователей 338 может быть использован компаратор. Поскольку объем информации в сигнале StarFire (со скоростью передачи 1200 или 2400 бит в секунду) является намного меньшим, чем в сигналах ГСНС, то может быть использована более низкая частота выборки, равная, например, 38,4 кГц. Эта частота является в 16 раз или в 32 раза более высокой, чем частота Найквиста, и облегчает возможные увеличения скорости широковещательной передачи данных в будущем. Она также обеспечивает возможность синхронизации краев битов данных с асинхронными цифровыми выборками без существенной потери мощности сигнала.
Наличие сигналов помех, показанных на чертеже на Фиг.2, может ухудшать отношение сигнал - шум (ОСШ) одного или большего количества навигационных сигналов ГСНС. Как замечено выше, в одном обычном подходе к определению с защитой от помех влияние помех от незатухающих волн пытаются уменьшить путем установки пороговых значений 214 дискретизации (Фиг.2) на основании амплитуды сигнала помехи таким образом, что во время обработки 342 сигналов (Фиг.3A) в приемнике используют выборки, взятые вблизи максимумов и минимумов сигнала помехи. В этом обычном подходе к определению с защитой от помех могут возникать затруднения в получении желательных совокупностей выборок. В вариантах осуществления приемника желательные совокупности выборок получают путем управления статистикой выборок на основании статистических свойств гауссова шума и сигналов помехи, а не на основании амплитуды сигнала помехи.
Выборки АЦП в приемниках ГСНС обычно являются ограниченными по шуму, то есть амплитуда шума является намного большей, чем амплитуда навигационных сигналов, широковещательную передачу которых осуществляют спутники. Как известно, шум имеет нормальные или гауссовы статистики, и ниже его именуют гауссовым шумом. На Фиг.5 показана вероятность 510 как функция нормированного отклонения 512 от среднего значения совокупности для совокупности 500 выборок, имеющих гауссовы статистические свойства. В некоторых вариантах осуществления изобретения отклонение 512 нормировано таким образом, что среднеквадратичное отклонение равно 1,0. Значения одной трети от всех выборок находятся в пределах 0,43 от значений среднеквадратичного отклонения от среднего значения совокупности (между линиями 514-1 и 514-2). Значения одной трети от всех выборок являются большими, чем среднее значение плюс 0,43 от значений среднеквадратичного отклонения (линия 514-2), а значения остальной трети от всех выборок являются меньшими, чем среднее значение минус 0,43 от значений среднеквадратичного отклонения (линия 514-1).
Для гауссова шума с фазой θ приблизительно 60% от всех выборок находится в пределах 0,86 от значений среднеквадратичного отклонения (между линиями 516-1 и 516-2). В этом случае 20% выборок являются большими по величине, чем среднее значение плюс 0,86 от значений среднеквадратичного отклонения (линия 516-2), и 20% выборок являются меньшими по величине, чем среднее значение минус 0,86 от значений среднеквадратичного отклонения (линия 516-1).
Когда сигнал помехи является большим по величине, чем гауссов шум, то вероятность того, что |cos(θ)| является большим, чем 0,5, равна 0,667, поскольку cos(60°) равен 0,5. Следовательно, если сигнал помехи не вводит приемник в состояние насыщения, то схема 330 АРУ (Фиг.3A) может регулировать коэффициент усиления схемы дискретизации, по меньшей мере, для одного из аналого-цифровых преобразователей 338 (Фиг.3A), используя первое не равное нулю пороговое значение дискретизации таким образом, что заранее заданная вероятность P 1 наличия выборки, не равной нулю, или первая активность, равна или приблизительно равна 2/3. Таким образом, первое не равное нулю пороговое значение дискретизации может быть установлено равным половине амплитуды сигнала помехи даже несмотря на то, что амплитуда сигнала помехи не была определена. Дискретизация сигналов, по меньшей мере, в одном из аналого-цифровых преобразователей 338 (Фиг.3A) в подканале 300 (Фиг.3A) с использованием коэффициента усиления и второго не равного нулю порогового значения дискретизации, по существу, равного удвоенному первому не равному нулю пороговому значению дискретизации, соответствует |cos(θ)|, равному 1,0, то есть максимумам и минимумам сигнала помехи. Это позволяет использовать при обработке 342 сигналов (Фиг.3A) выборки, полученные в тех местах, где скорость изменения сигнала помехи почти равна нулю, что, тем самым, улучшает работу приемника при наличии сильных помех, которыми являются, например, помехи от незатухающих волн. Как описано ниже, использование этого подхода для установки коэффициента усиления с использованием схемы 330 АРУ (Фиг.3A) и порогового значения дискретизации для аналого-цифрового преобразователя 338 (Фиг.3A) не приводит к заметному ухудшению работы приемника в отсутствии помех. Несмотря на то что в описанном в этом абзаце подходе используют коэффициент усиления, первое не равное нулю пороговое значение дискретизации, соответствующее первой активности, равной 2/3, и второе не равное нулю пороговое значение дискретизации, по существу, равное удвоенному первому не равному нулю пороговому значению дискретизации, в других вариантах осуществления изобретения могут использоваться иное значение активности и иное значение отношения второго не равного нулю порогового значения дискретизации к первому не равному нулю пороговому значению дискретизации.
Подход к детектированию с защитой от помех может быть реализован с использованием справочной таблицы 336 (Фиг.3A). В некоторых вариантах осуществления изобретения справочная таблица 336 (Фиг.3A) может быть программируемой. Аналого-цифровые преобразователи 338 (Фиг.3A) могут выполнять операцию установления первого соответствия с использованием первого не равного нулю порогового значения дискретизации и второго соответствия с использованием второго не равного нулю порогового значения дискретизации. В таблице I проиллюстрирована справочная таблица 336, пригодная для установления первого и второго соответствий. При установлении первого соответствия 4-битовые выборки АЦП определены таким образом, что две трети выборок являются по величине большими или равными единице (активные), а одна треть выборок является неактивной. При установлении второго соответствия не равное нулю пороговое значение дискретизации удваивают, и осуществляют преобразование выборок в выборки с трехуровневой (знак и величина) дискретизацией. Эти выборки имеют статистики, соответствующие одной трети от всех выборок, больших по величине, чем среднее значение плюс 0,43 от значений среднеквадратичного отклонения (линия 514-2), которые показаны на Фиг.5, и остальной трети от всех выборок, меньших по величине, чем среднее значение минус 0,43 от значений среднеквадратичного отклонения (линия 514-1), которые показаны на Фиг.5, при отсутствии помех. При наличии сильных помех выборки соответствуют максимумам и минимумам сигнала помехи.
Установление первого и второго соответствий по справочной таблице
(в двоичном представлении)
Другие варианты осуществления справочной таблицы 336 (Фиг.3A) могут содержать только одно соответствие и/или в них могут быть использованы варианты дискретизации с иным количеством битов для первого соответствия и/или для второго соответствия. Например, пятиуровневая дискретизация может быть реализована или выбрана с использованием логического устройства 334 управления (Фиг.3A). При пятиуровневой дискретизации значениями q(v) выборок, полученными на основании измеренного напряжения v, являются следующие:
q(v)=-2; v<-V
q(v)=-1; - V<v<-0,5V
q(v)=0; -0,5V<v<0,5V
q(v)=1; 0,5V<v<V
q(v)=2; V<v,
где V представляет собой пороговое значение для дискретизации. Это может быть эквивалентным образом переформулировано в выражение для трех уровней:
q(v)-1 и активная v<-V
q(y)=0 и активная - V<v<-0,5V
q(v)=0 и неактивная 0,5V<v<0,5V
q(y)=0 и активная 0,5V<v<V
q(v)=1 и активная V<v.
Для оценки эффективности этого подхода к решению проблемы регистрации с защитой от помех ниже приведено дополнительное описание теоретических основ. Идеальный аналого-цифровой преобразователь, в котором используют трехуровневую дискретизацию, определяет q(v) следующим образом:
q(v)=-1 v<-V
=0 -V<v<V
=1 V<v.
Предполагается, что выборки являются сбалансированными относительно нуля, например, с использованием схемы 348 коррекции смещения постоянной составляющей (Фиг.3A), вследствие чего, по существу, имеется лишь небольшое смещение постоянной составляющей или же это смещение отсутствует.
Амплитуда s сигнала из соответствующего спутника является намного меньшей, чем гауссов шум плюс амплитуда сигнала помехи вследствие того, что мощность кода разнесения сигнала по спектру является распределенной по спектру. Вероятностная функция для сигнала p(x) имеет среднее значение z, равное нулю.
Для трехуровневых выборок, интервал между значениями которых равен 1,0 (то есть для выборок -1, 0 и 1), среднее значение искомого сигнала равно:
 ,
,
а дисперсия равна
 . (1)
. (1)
ОСШ ( ) выборок на выходе определяется следующим образом:
) выборок на выходе определяется следующим образом:
 .
.
ОСШ искомого сигнала и гауссова шума равно:
 ,
,
где  = N представляет собой дисперсию компоненты гауссова шума сигнала p(x).
= N представляет собой дисперсию компоненты гауссова шума сигнала p(x).
Ухудшение  качества выходного сигнала при наличии помех от незатухающих волн равно:
качества выходного сигнала при наличии помех от незатухающих волн равно:
 .
.
В этом уравнении сделано предположение, что  является симметричным относительно 0, что является справедливым для кодов разнесения сигнала по спектру в ГСНС. Функция плотности вероятности для гауссова шума имеет вид:
является симметричным относительно 0, что является справедливым для кодов разнесения сигнала по спектру в ГСНС. Функция плотности вероятности для гауссова шума имеет вид:
 .
.
Следовательно, вероятность  того, что значение выборки s, полученной путем трехуровневой дискретизации, не равно нулю, равна:
того, что значение выборки s, полученной путем трехуровневой дискретизации, не равно нулю, равна:
 , (2)
, (2)
поскольку дискретизированное значение выборки равно нулю для -V<x<V. Следует отметить, что уравнение 2 является идентичным уравнению 1, которое представляет собой уравнение для дисперсии.  определено как активность выборок.
определено как активность выборок.
Когда присутствуют помехи от незатухающих волн, то к гауссову шуму добавлен, по меньшей мере, синусоидальный сигнал помехи. Уравнение для активности, то есть уравнение 2, для сигнала, содержащего мешающий сигнал или сигнал помехи, представляет собой свертку функций плотности вероятности для гауссова шума и синусоидального сигнала помехи, так как гауссов шум и синусоидальный сигнал помехи являются независимыми. В приемнике фаза θ синусоидального сигнала помехи является случайной относительно сигнала, то есть функция плотности вероятности является равномерной в диапазоне от 0 до 2π. Мгновенное значение синусоидального сигнала помехи с произвольной фазой φ равно:
 , (3)
, (3)
где J представляет собой среднюю мощность синусоидального сигнала помехи. Следует отметить следующее: даже в том случае, если помехи от незатухающих волн являются несинусоидальными, например, представляя собой прямоугольный сигнал, поворот 426 в комплексной области (Фиг.4), более подробное описание которого приведено ниже, выполняемый в некоторых вариантах осуществления приемника, имеет эффект, что помехи от незатухающих волн становятся приближенными к синусоидальному сигналу помехи.
На Фиг.6 показан график зависимости вычисленного ухудшения  отношения сигнал/шум (ОСШ) в выходном сигнале от вероятности
отношения сигнал/шум (ОСШ) в выходном сигнале от вероятности  наличия выборки, не равной нулю, или, иными словами, от активности, в трехуровневом преобразователе, например, в том, который проиллюстрирован вторым соответствием в таблице I, для множества отношений средней мощности синусоидального сигнала помехи к мощности гауссова шума, то есть для различных значений
наличия выборки, не равной нулю, или, иными словами, от активности, в трехуровневом преобразователе, например, в том, который проиллюстрирован вторым соответствием в таблице I, для множества отношений средней мощности синусоидального сигнала помехи к мощности гауссова шума, то есть для различных значений
 .
.
Проблема состоит в том, как определить уровень помех, то есть отношение  и соответствующую оптимальную вероятность
и соответствующую оптимальную вероятность  наличия выборки, не равной нулю, или активность. При увеличении средней мощности
наличия выборки, не равной нулю, или активность. При увеличении средней мощности  синусоидального сигнала помехи оптимальная активность должна уменьшаться. Если бы отношение было известно, то активность могла бы быть отрегулирована контроллером, например, логическим устройством 334 управления (Фиг.3A) в соответствии с вероятностью наличия выборки, не равной нулю, из уравнения 2. Однако оценка отношение является трудной задачей, поскольку для этого требуется точная калибровка схемы 300 подканала (Фиг.3A) и хорошая оценка параметра при наличии шумов. Подход определения с защитой от помех, описание которого приведено выше и который реализован в вариантах осуществления приемника, помогает преодолеть эту трудность.
синусоидального сигнала помехи оптимальная активность должна уменьшаться. Если бы отношение было известно, то активность могла бы быть отрегулирована контроллером, например, логическим устройством 334 управления (Фиг.3A) в соответствии с вероятностью наличия выборки, не равной нулю, из уравнения 2. Однако оценка отношение является трудной задачей, поскольку для этого требуется точная калибровка схемы 300 подканала (Фиг.3A) и хорошая оценка параметра при наличии шумов. Подход определения с защитой от помех, описание которого приведено выше и который реализован в вариантах осуществления приемника, помогает преодолеть эту трудность.
При выборе второго не равного нулю порогового значения дискретизации таким образом, чтобы он соответствовал максимумам и минимумам синусоидального сигнала помехи, подразумевают, что вероятность  наличия выборки, не равной нулю, или активности, приближается к нулю, но не равна нулю. Определение второго не равного нулю порогового значения дискретизации путем выбора первой вероятности P
1 выборки, не равной нулю, или первой активности, соответствующей меньшему первому не равному нулю пороговому значению дискретизации, дает большие возможности наличия ошибки, поскольку первая вероятность P
1 выборки, не равной нулю, или активность, является большей нуля. В варианте осуществления изобретения, который приведен в качестве примера, первая вероятность P
1 выборки, не равной нулю, или активность, по существу, равна 2/3. Путем регулировки коэффициента усиления с использованием схемы 330 АРУ (Фиг.3A) в соответствии с первым не равным нулю пороговым значением дискретизации, которое, например, равно 0,5V, вторая вероятность P
2 выборки, не равной нулю, приблизительно равна 0 для второго не равного нулю порогового значения дискретизации, которым в этом примере является V, при наличии сильных помех относительно гауссова шума, то есть когда шум пренебрежимо мал. Для случая наличия только гауссова шума определение коэффициента усиления с использованием схемы 330 АРУ (Фиг.3A) приводит к той же самой первой активности, равной 2/3, для первого не равного нулю порогового значения дискретизации, равного 0,5V, и приводит к тому, что вторая вероятность P2 выборки, не равной нулю, равна 0,39 в том случае, когда в качестве второго не равного нулю порогового значения дискретизации используют V. Как показано на Фиг.6, это является близким к оптимуму для этого случая. Было установлено, что этот подход определения с защитой от помех (регулировка коэффициента усиления с использованием схемы 330 АРУ, показанной на Фиг.3A, в соответствии с уменьшенным первым не равным нулю пороговым значением дискретизации, равным 0,5V, для получения активности, по существу, равной 2/3), улучшает рабочие характеристики приемника для широкого диапазона значений отношения .
наличия выборки, не равной нулю, или активности, приближается к нулю, но не равна нулю. Определение второго не равного нулю порогового значения дискретизации путем выбора первой вероятности P
1 выборки, не равной нулю, или первой активности, соответствующей меньшему первому не равному нулю пороговому значению дискретизации, дает большие возможности наличия ошибки, поскольку первая вероятность P
1 выборки, не равной нулю, или активность, является большей нуля. В варианте осуществления изобретения, который приведен в качестве примера, первая вероятность P
1 выборки, не равной нулю, или активность, по существу, равна 2/3. Путем регулировки коэффициента усиления с использованием схемы 330 АРУ (Фиг.3A) в соответствии с первым не равным нулю пороговым значением дискретизации, которое, например, равно 0,5V, вторая вероятность P
2 выборки, не равной нулю, приблизительно равна 0 для второго не равного нулю порогового значения дискретизации, которым в этом примере является V, при наличии сильных помех относительно гауссова шума, то есть когда шум пренебрежимо мал. Для случая наличия только гауссова шума определение коэффициента усиления с использованием схемы 330 АРУ (Фиг.3A) приводит к той же самой первой активности, равной 2/3, для первого не равного нулю порогового значения дискретизации, равного 0,5V, и приводит к тому, что вторая вероятность P2 выборки, не равной нулю, равна 0,39 в том случае, когда в качестве второго не равного нулю порогового значения дискретизации используют V. Как показано на Фиг.6, это является близким к оптимуму для этого случая. Было установлено, что этот подход определения с защитой от помех (регулировка коэффициента усиления с использованием схемы 330 АРУ, показанной на Фиг.3A, в соответствии с уменьшенным первым не равным нулю пороговым значением дискретизации, равным 0,5V, для получения активности, по существу, равной 2/3), улучшает рабочие характеристики приемника для широкого диапазона значений отношения .
Оценка эффективности этого подхода к решению проблемы регистрации с защитой от помех может быть выполнена следующим образом. Для предполагаемого отношения определяют коэффициент усиления с использованием схемы 330 АРУ (Фиг.3A), который дает первую вероятность P
1 наличия выборки, не равной нулю, которая равна 2/3, как проиллюстрировано в уравнении 2. Так как в одном из вариантов осуществления изобретения второе не равное нулю пороговое значение дискретизации равно удвоенному первому не равному нулю пороговому значению дискретизации, то оно уменьшает коэффициент усиления на 6 дБ относительно его значения, соответствующего первой вероятности P
1 наличия выборки, не равной нулю, которая равна 2/3, и обеспечивает оценку результирующей эффективности. На Фиг.7 показан график зависимости вычисленного ухудшения ОСШ на выходе для подхода к определению с защитой от помех в вариантах осуществления приемника по сравнению с оптимальным функционированием. Разность между результатами для этого подхода к определения с защитой от помех в вариантах осуществления приемника и для оптимального функционирования является небольшой в широком диапазоне значений отношения .
Рассмотрим пример импульсного сигнала с коэффициентом заполнения, равным 0,1, при наличии чрезвычайно сильных помех. Когда проходит импульс, то выходной сигнал аналого-цифровых преобразователей 338 (Фиг.3A) равен ±1, и искомый сигнал уничтожается. Когда импульс отсутствует, то шум является гауссовым. Если в приемнике не используют подход определения с защитой от помех с двухбитовой (трехуровневой) дискретизацией, то первая вероятность P 1 наличия выборки, не равной нулю, или первая активность приблизительно равна 1,0 при прохождении импульса и равна P 0-0,1 тогда, когда импульс отсутствует, где P 0 - полная желательная активность. В предложенном подходе определения с защитой от помех желательная активность P 0 равна 0,667 при использовании первого не равного нулю порогового значения дискретизации, равного 0,5V. Таким образом, когда импульс отсутствует, первая активность равна 0,567 с использованием первого не равного нулю порогового значения дискретизации 0,5V. Для приемника, ограниченного гауссовым шумом, то есть когда импульс отсутствует, вторая активность равна 0,253 при использовании второго не равного нулю порогового значения дискретизации, равного V. Ухудшение рабочих характеристик для приемника, ограниченного гауссовым шумом, при этом пороговом значении составляет -1,66 дБ. Уничтожение импульсом доли сигнала, равной 0,1, приводит к дополнительному ухудшению характеристик на 0,92 дБ. Следовательно, общее ухудшение характеристик составляет -2,58 дБ. Если коэффициент заполнения импульса является большим, чем 0,1, то происходит значительно большее ухудшение характеристик.
Вследствие этого в некоторых вариантах осуществления приемника в одном или в большем количестве подканалов, например в подканале 300 (Фиг.3A), может быть использована схема гашения для уменьшения влияния импульсных помех. В предыдущем примере путем прекращения обработки сигналов в момент прохождения импульса и возобновления обработки при отсутствии импульса ухудшение рабочих характеристик происходит только лишь из-за потерь, обусловленных коэффициентом заполнения, то есть составляет -0,92 дБ для коэффициента заполнения, равного 0,1.
На Фиг.8 проиллюстрирован вариант осуществления схемы 800 гашения. Приемник контролирует величину входных выборок для того, чтобы обнаружить внезапное увеличение доли очень больших по величине выборок, вызванное сильными помехами. Если происходит такое внезапное увеличение, то приемник прекращает обработку сигналов (включает режим гашения). Когда приемник обнаруживает отсутствие больших по величине выборок, то режим гашения выключают (запрещают). Пока включен режим гашения, схема АРУ и схема обратной связи, регулирующая положение нуля, отключены.
3-х битовые значения для I-выборок 810 и 3-х битовые значения Q-выборок 812, сравнивают с пороговым значением в компараторах 814. В некоторых вариантах осуществления изобретения пороговое значение является программируемым. Если значение I-выборок 810 или Q-выборок 812 превышает пороговое значение, то показание счетчика 826 увеличивают на единицу с использованием логического элемента 818 "ИЛИ". Через каждые 16 периодов выборки показания счетчиков 826 сбрасывают с использованием генератора 820 тактовых импульсов для выборки и схемы 822-1 деления на 16. Если показание счетчика 826 достигает отсчета, равного 12, что определяют посредством компаратора 828, указывая, что 12 из 16 результатов измерений являются большими по величине, то включают 844 гашение с использованием триггера-защелки 838 и логического элемента 842 ИЛИ. После того как гашение включено, оно остается включенным до тех пор, пока, по меньшей мере, в 100 из 128 выборок величина обеих I и Q компонент будет меньшей, чем пороговое значение. Это реализуют с использованием логического элемента 832 И, счетчика 834, компаратора 836 и триггера-защелки 838. Сброс показаний счетчика 834 выполняют с использованием схем 822 деления на 16 и логического элемента 830 ИЛИ.
Вероятность и количество среднеквадратичных отклонений для возможных 3-битовых выборок, которые превышают по величине гауссов шум, проиллюстрированы в таблице II. В таблице II предполагают, что активность для управления АРУ равна 2/3. Вероятность наличия больших выборок является малой, но не чрезмерно малой. Если желательна очень низкая вероятность гашения, обусловленного наличием случайного шума, то группа выборок может быть проконтролирована, и гашение включают только в том случае, когда значительную долю выборок составляют большие по величине выборки.
3-битовое значение, величина среднеквадратичных отклонений от среднего значения совокупности выборок и соответствующее значение вероятности для выборок 810 и 812 в схеме 800 гашения
Было выполнено большое количество моделирований для определения пороговых значений в компараторах 814 (для включения режима гашения) и для определения того, когда следует отключить режим гашения, то есть когда импульсные помехи больше не присутствуют. На основании этого моделирования в варианте осуществления схемы 800 гашения, который приведен в качестве примера, гашение включают в том случае, если I-выборки 810 и/или для Q-выборки 812 являются по величине большими или равными 4 в течение 12 из 16 периодов выборки (таким образом, в этом примере пороговое значение в компараторах 814 устанавливают равным 4). Пороговое значение для компараторов 814 может быть в восемь раз большим, чем первое не равное нулю пороговое значение дискретизации, которое равно 0,5V. Также может быть использован гистерезис между включением и отключением гашения для уменьшения переключения режима гашения импульсных помех из одного состояния в другое с высокой частотой. В варианте осуществления изобретения, который приведен в качестве примера, гашение отключают в том случае, если оба типа выборок: I-выборки 810 и Q-выборки 812, являются по величине меньшими чем 4 в 100 из 128 периодов выборки.
Схема 800 гашения также обеспечивает поддержку гашения 840 с внешним управлением, которое включает гашение тогда, когда оно считает это необходимым. Эта функциональная возможность может использоваться, когда осуществляют широковещательную передачу совместного сигнала помехи, например, при радиопередаче или из совместно работающего псевдоспутника (например, сигнала, соответствующего фальшивому спутнику Глобальной системы определения местоположения (GPS)). Гашение может также быть отключено. Это обычно используют в течение нескольких первых секунд после включения приемника для того, чтобы дать возможность схеме 330 АРУ (Фиг.3A) и схемам 348 коррекции смещения постоянной составляющей (Фиг.3Б) войти в устойчивый режим работы.
На Фиг.15 проиллюстрирован вариант осуществления схемы 1500 АРУ, которой является, например, схема 330 АРУ (Фиг.3A). Схема 1500 АРУ является простой в реализации, обеспечивает очень хорошее противодействие помехам и является прозрачной для последующих этапов обработки сигналов, например, для устройства 342 обработки сигналов (Фиг.3A). В компараторах 1514 выполняют сравнение величины I-выборок 1510 и Q-выборок 1512 с пороговым значением. В некоторых вариантах осуществления изобретения пороговое значение в компараторах 1514 может быть программируемым. В некоторых вариантах осуществления изобретения пороговым значением может являться первое не равное нулю пороговое значение дискретизации. Если величина I-выборок 1510 и/или Q-выборок 1512 является большей или равной пороговому значению, то соответствующие выборки являются активными. Если же величина соответствующих выборок является меньшей, чем пороговое значение, то они являются неактивными (как было проиллюстрировано в первом соответствии в Таблице I). Может быть выполнено суммирование нескольких активных I-выборок и/или Q-выборок с использованием сумматоров 1518, 1520 и 1522. Период суммирования установлен равным промежутку времени равного N2 периодам выборки, с использованием схемы 1524 обратной связи с делением на N2. Стробирование схемы 1524 обратной связи с делением на N2 осуществляют посредством сигнала 1508 разрешения выборки. Значение N2 выбрано таким образом, что оно не является целочисленным делителем нескольких выборок за микросекунду (для предотвращения наложения спектров на соответствующей частоте на сигнал ПЧ и/или на один или на большее количество тактовых сигналов, например, на сигнал, используемый для стробирования, по меньшей мере, одного из аналого-цифровых преобразователей 338, показанных на Фиг.3A). Вследствие этого частота обратной связи равна, приблизительно, 200 кГц, и желательный уровень активности может быть точно выражен как дробная часть от величины М/(2·N2), где М - целое число. В варианте осуществления изобретения, который приведен в качестве примера, N2 может быть равно 176.
В конце промежутка времени, определенного посредством N2, подсчитанное количество активных I-выборок и Q-выборок сравнивают с целевым пороговым значением в компараторе 1526. В некоторых вариантах осуществления изобретения целевое пороговое значение является программируемым. В некоторых вариантах осуществления изобретения целевое пороговое значение соответствует первой вероятности наличия выборки, не равной нулю, или первой активности. Если сумма является большей, чем целевое пороговое значение, то имеется слишком большое количество активных выборок, и коэффициент усиления, определенный с использованием, по меньшей мере, одной схемы 330 АРУ (Фиг.3A), уменьшают путем подачи импульса на инвертирующий вход операционного усилителя АРУ по линии 1528 АРУ М. Если же сумма является меньшей, чем целевое пороговое значение, то имеется слишком мало активных выборок. Коэффициент усиления увеличивают путем подачи импульса на неинвертирующий вход операционного усилителя АРУ по линии 1530 АРУ P. Операционный усилитель и вспомогательные схемы могут быть выбраны таким образом, чтобы эффективное время интегрирования находилось в интервале от 100 мс до 10 с. Как проиллюстрировано на схеме 1500 АРУ, импульсы обратной связи имеют длительность, равную, по меньшей мере, одному периоду тактовых импульсов для выборки. Более быстрый отклик АРУ может быть получен путем создания импульсов обратной связи, длина которых является пропорциональной абсолютной величине суммы I-выборок и/или суммы Q-выборок минус целевое пороговое значение, то есть пропорциональной сигналу управления с обратной связью. Следует отметить, что в тех вариантах осуществления приемника, в которых в аналого-цифровых преобразователях 338 (Фиг.3A) используют однобитовую дискретизацию, обратная связь для АРУ может быть не нужна.
Со ссылкой на Фиг.3A выборки из одной или большего количества схем подканалов, например, из схемы 300 подканала, могут быть подвергнуты обработке в устройстве 342 обработки (процессора) сигналов. В некоторых вариантах осуществления изобретения выборки в устройство 342 обработки сигналов могут поступать из более чем одного подканала. Некоторые варианты осуществления изобретения могут содержать более одного устройства обработки сигналов, и устройство обработки (процессора) сигналов может использоваться совместно таким образом, что устройства обработки сигналов функционируют как единое устройство обработки сигналов. Выборки из соответствующей схемы подканала, например, из схемы 300 подканала, могут быть направлены в больше чем одно из устройств обработки сигналов.
Обработка сигналов может быть реализована в аналоговых схемах, в цифровых схемах или в комбинации из аналоговых и цифровых схем. За исключением аналого-цифровых преобразователей 338, операции могут быть выполнены с использованием аппаратных средств, например, с использованием специализированной интегральной микросхемы (ASIC), программного обеспечения или комбинации из аппаратных средств и программного обеспечения.
Привязка по времени в схемах подканалов и в аналого-цифровых преобразователях 338 является полезной при обработке 342 сигналов. На Фиг.9 проиллюстрирован вариант осуществления схемы 900 привязки по времени. Когда выборка разрешена 910, то осуществляют генерацию времени 924 измерения путем деления тактового импульса выборки на программируемое целое число N3, которое обеспечивает регистр 912 для N3 в установившемся режиме. Каждый раз, когда делитель 914, выполняющий деление всемирного времени на N3, достигает его конечного состояния ES, наступает время 924 измерения, и делитель 914, выполняющий деление всемирного времени на N3, повторно инициализируют. Данные ГСНС, содержащие перечень псевдодальности и накопленные результаты корреляции, могут быть помещены в буфер для их вывода на основании времени 924 измерения. Использование программируемого делителя 914, выполняющего деление всемирного времени на N3, позволяет изменять частоту выборки в аналого-цифровых преобразователях 338 (Фиг.3A), частоту первого сигнала гетеродина и/или частоту второго сигнала гетеродина без воздействия на конструкцию устройства 342 обработки сигналов (Фиг.3A). Вследствие этого частота выборки может быть отрегулирована исходя из значений ширины полосы частот сигналов и/или из имеющихся компонентов.
Так как измерения основаны на времени, созданном общим генератором опорной частоты в приемнике и/или одним или большим количеством генераторов опорной частоты в одной или в большем количестве схем подканалов, например, генератором 316 опорной частоты, то приемник представляет собой пользовательский приемник для измерения времени. В некоторых приемниках ГСНС измерения времени основаны на событиях в одном или в большем количестве принятых спутниковых сигналов, одним из которых является, например, начало периода кода грубого определения местоположения объектов (C/A) длительностью 1 мс. Такие приемники именуют канальными приемниками измерения времени.
В схеме 900 привязки по времени доступны две переменные для управления синхронизацией времени 924 измерения. Регистр 912 для N3 в установившемся режиме может быть запрограммирован на несколько тактовых импульсов для выборки между измерениями. Делитель 914, выполняющий деление всемирного времени на N3, устанавливают значение, хранящееся в регистре 912 для N3 в установившемся режиме, после того как делитель 914, выполняющий деление всемирного времени на N3, достигает его конечного состояния ES, если управляющей программой не было записано новое значение с использованием регистра 916 для одноразового вывода N3 с того момента времени, когда имело место последнее конечное состояние. Если новое значение было записано, то значение делителя 914, выполняющего деление всемирного времени на N3, устанавливают равным значению в регистре 916 для одноразового вывода N3. Как правило, управляющая программа устанавливает содержимое регистра 912 для N3 в установившемся режиме таким образом, чтобы его содержимое соответствовало частоте тактовых импульсов для выборки. Затем программа регулирует синхронизацию времени 924 измерения таким образом, чтобы оно совпадало со скоординированным всемирным временем (UTC) или с временем Глобальной системы определения местоположения (GPS) путем периодического сокращения или увеличения длительности одного периода измерения с использованием регистра 916 для одноразового вывода N3.
Управление сигналом 926 количества импульсов в секунду (PPS) является аналогичным управлению сигналом 924 времени измерения, за исключением того, что делитель 920, выполняющий деление количества импульсов в секунду на P, отсчитывает сигналы 924 времени измерения вместо времени выборки. Сигнал 926 количества импульсов в секунду должен появляться в моменты времени, соответствующие целому кратному от времени 924 измерения. И вновь, имеются две переменные управления, реализованные с использованием регистра 918 для P в установившемся режиме, и регистр 922 для однократного вывода P. Регистр 918 для P в установившемся режиме определяет количество значений 924 времени измерения в установившемся режиме между выходными сигналами 926 о количестве импульсов в секунду, а регистр 922 для однократного вывода P применяют однократно для сдвига фазы сигнала 926 о количестве импульсов в секунду относительно желательного времени вывода. Например, если навигационное решение в Глобальной системе определения местоположения (GPS) указывает, что частота тактовых импульсов для выборки равна 40922 тактовым импульсам за одну миллисекунду (мс) и что время 924 последнего измерения имело место в момент времени 10 мс плюс 2000 тактовых импульсов минус период универсального скоординированного времени в миллисекундах (мс), то управляющая программа может синхронизировать время 924 измерения и сигнал 926 о количестве импульсов в секунду со скоординированным всемирным временем путем конфигурирования регистров следующим образом. Содержимое регистра 912 для N3 в установившемся режиме может быть установлено равным 40922, чтобы оно соответствовало частоте тактовых импульсов для выборки, а содержимое регистра 916 для одноразового вывода N3 может быть установлено равным 40922 минус 2000 для синхронизации времени 924 измерения с миллисекундой скоординированного всемирного времени. Следующий период измерения будет иметь длительность 38922 тактовых импульса, и после него будет следовать период измерения в установившемся режиме длительностью 40922 тактовых импульса. Содержимое регистра 918 для P в установившемся режиме может быть установлено равным 1000 для создания одного импульса в секунду, а содержимое регистра 922 для однократного вывода P может быть установлено равным 1000 минус 10 для синхронизации сигнала 926 о количестве импульсов в секунду с секундой скоординированного всемирного времени. Имеется один промежуток времени для сигнала 926 о количестве импульсов в секунду длительностью 900 периодов измерения, после которого в установившемся режиме следуют импульсы с частотой один импульс на 1000 сигналов 924 времени измерения.
На Фиг.10 проиллюстрирован вариант осуществления схемы 1000 запуска и остановки. Соответствующий канал в приемнике, например, первый канал, может быть включен путем записи значения в регистр 1012 для подсчета количества М включений. Эта команда становится активной в момент времени 924 измерения (Фиг.9) после соответствующей записи в регистр 1012 для подсчета количества М включений. Когда сигнал делителя 914, выполняющего деление всемирного времени на N3, совпадает с временем запуска, то выполняют установку регистров соответствующего канала в исходное состояние с использованием сигнала 1018 разрешения включения канала, обеспечиваемого триггером-защелкой 1014, и соответствующий канал начинает обработку сигналов. По умолчанию устройства кодирования, например, устройство 430 кодирования (Фиг.4), начинают работу в их начальном состоянии кода. Если длина кода превышает 1 мс, то управляющая программа может ограничивать значения времени запуска или программировать сдвиговый регистр для кода таким образом, чтобы он имел надлежащее начальное состояние в выбранный момент времени запуска.
Соответствующий канал останавливают путем записи команды в регистр остановки соответствующего канала. Когда получена команда 1016 остановки, то все узлы соответствующего канала могут быть выключены и переведены в режим с малым энергопотреблением. Работа соответствующего канала может быть возобновлена путем записи новой команды в регистр 1012 для подсчета количества М включений.
На Фиг.4 проиллюстрирован вариант осуществления устройства 400 обработки сигналов, которым является, например, устройство 342 обработки сигналов (Фиг.3A). Аналого-цифровые преобразователи 410 и 412 обеспечивают соответственно I-выборки и Q-выборки. Аналого-цифровые преобразователи 410 и 412 являются первым портом к схеме 400 обработки сигналов, по меньшей мере, для соответствующей схемы подканала. Таким образом, первый порт соответствует, по меньшей мере, соответствующему подканалу, принимающему данные на одной несущей частоте сигнала, имеющейся в сигнале. Может существовать один или большее количество дополнительных портов из дополнительных схем подканалов, соединенных либо со схемой 400 обработки сигналов, либо с дополнительными экземплярами схемы 400 обработки сигналов. В вариантах осуществления изобретения с многочастотной антенной для каждой несущей частоты сигнала, имеющейся в сигнале, может быть использован отдельный подканал и отдельный порт. В вариантах осуществления изобретения с множеством антенн, например, в системе определения положения в пространстве, может требоваться отдельный порт для каждой несущей частоты сигнала, имеющейся в сигналах из каждой антенны.
I-выборки и Q-выборки подают в трехуровневые преобразователи 414, которые выполняют преобразование из количества битов в I-выборках и Q-выборках в знак и величину, как было проиллюстрировано во втором соответствии в таблице I. В некоторых вариантах осуществления изобретения трехуровневые преобразователи 414 могут быть реализованы с использованием электронной схемы вместо справочной таблицы, которой является, например, справочная таблица 344 (Фиг.3A). Выборки подают в мультиплексоры 416 и 418, которые соединяют остаток из схемы 400 обработки сигналов, по меньшей мере, с одним из портов.
Со ссылкой на Фиг.3A, опорные сигналы из генератора 324 квадратурных сигналов могут иметь сдвиг по фазе, не в точности равный 90°. Если выполнено преобразование сигнала с понижением частоты до полосы частот исходных сигналов, то в результате этого возникают погрешности фазы или систематические погрешности и соответствующие потери при обработке сигналов. Вследствие этого в обычных приемниках обычно не используют квадратурную регистрацию и выборку, как показано на чертеже Фиг.3A. Кроме того, как правило, выборку и дискретизацию обычно производят не в полосе частот исходных сигналов. Вместо этого выборку и дискретизацию обычно могут выполнять на остаточной ПЧ, например, на частоте, равной одной четвертой частоты выборки аналого-цифрового преобразователя, например, аналого-цифровых преобразователей 338. Остаточная систематическая погрешность может быть устранена путем увеличения частоты выборки аналого-цифрового преобразователя и усреднения выборок. Аналого-цифровой преобразователь в этих обычных приемниках, по существу, осуществляет преобразование сигнала с понижением частоты до полосы частот исходных сигналов. Однако результирующие I-выборки и Q-выборки определяют по промежутку времени. Это может затруднять коррекцию сигнала 116 многолучевого распространения (Фиг.1). Также могут иметь место потери мощности, связанные с увеличенной частотой выборки аналого-цифрового преобразователя. В тех обычных приемниках, в которых реализовано преобразование с понижением частоты непосредственно из радиочастот в полосу частот, близкую к полосе частот исходных сигналов, квадратурную регистрацию обычно не используют.
В приемнике в устройстве 110 (Фиг.1) осуществляют преобразование сигнала с понижением частоты до полосы частот, по существу, близкой к полосе частот исходных сигналов и, как описано выше при описании схемы 300 подканала, может быть выполнена его квадратурная выборка и дискретизация. Этот подход к определению позволяет определять I-выборки и Q-выборки, по существу, одновременно. Это, в свою очередь, может обеспечить возможность улучшенной коррекции сигнала 116 многолучевого распространения (Фиг.1) и более низкое энергопотребление. Однако по-прежнему остается возможной остаточная систематическая погрешность, связанная с погрешностями фазы в опорных сигналах из генератора 324 квадратурных сигналов. Преобразование с понижением частоты до полосы частот, по существу, близкой к полосе частот исходных сигналов, обеспечивает решение этой проблемы. Как отмечено выше, результирующий сигнал фактически имеет преднамеренный доплеровский сдвиг частоты. Во время обработки 342 сигналов может быть выполнено вращение фазы в комплексной области для введения поправки на этот преднамеренный доплеровский сдвиг частоты. В процессе этого соответствующая систематическая погрешность является, по существу, равномерно распределенной по углам 0°-360°, и ее среднее значение равно нулю.
И вновь со ссылкой на Фиг.4, вращение в комплексной области для коррекции остаточной систематической погрешности и преднамеренного доплеровского сдвига частоты, которые связаны с преобразованием с понижением частоты до полосы частот, по существу, близкой к полосе частот исходных сигналов, выполняют в схеме 426 вращения в комплексной области (например, путем принудительного обнуления Q-выборок). Как более подробно описано ниже, вращение в комплексной области может быть выполнено на основании значения из справочной таблицы 424. Это значение определяют на основании сигнала из генератора сигнала несущей или ГЦУ 420, который является частью контура отслеживания несущей или фазы, определяющего преднамеренный доплеровский сдвиг частоты, подлежащий коррекции. В корреляторах 432 и 434 выполняют демодуляцию, по меньшей мере, одного кода разнесения сигнала по спектру в выборках сигнала на основании сигналов из устройства 430 кодирования и генератора кодового сигнала или ГЦУ 428, который является частью контура отслеживания кода. Накопленные I и Q составляющие из корреляторов 432 и 434 подканала выводят во время 924 измерения (Фиг.9) в программу обработки сигналов, в которой накопленные значения могут быть использованы для вычисления сигналов обратной связи для контуров отслеживания фазы и кода.
Операции вращения и корреляции фактически смешивают спутниковый сигнал, внедренный в I-выборки и в Q-выборки, с копией этой сигнала, генерация которой осуществлена в соответствующем канале. Если фаза, частота и временная диаграмма точной копии сигнала, по существу, дублируют фазу, частоту и временную диаграмму сигнала, принятого со спутника, то мощность, накопленная корреляторами 432 и 434 подканала, является максимальной. При наличии ошибок синхронизации в копии сигнале мощность, накопленная корреляторами 432 и 434, уменьшается в том случае, если ошибка синхронизации кода является меньшей, чем один бит кода разнесения сигнала по спектру, или равна нулю, если ошибка является большей или равной одному биту кода разнесения сигнала по спектру.
Операции вращения и корреляции выполняют на частоте дискретизации, поэтому происходят очень небольшие потери в величине ОСШ вследствие обработки сигналов. Порядок выполнения операций вращения и корреляции является произвольным. Следовательно, в некоторых вариантах осуществления изобретения операция корреляция может быть выполнена перед операцией вращения, операция вращения может быть выполнена перед операцией корреляции, или операции вращения и корреляции могут быть объединены в единую операцию. В варианте осуществления изобретения, который приведен в качестве примера, операцию вращения выполняют перед операцией корреляцией. Это позволяет выполнять одно вращение для каждой пары I и Q выборок. Однако существует много возможных вариантов корреляции, в том числе один набор вариантов для каждого подканала.
Как показано на Фиг.4, I-выборки и Q-выборки из одной или большего количества схем подканалов, например, из схемы 300 подканала (Фиг.3A), смешивают с компонентой опорного сигнала несущей частоты для соответствующего канала путем вращения 426 I-выборок и Q-выборок в комплексной области. Генерацию повернутых выборок IR и QR осуществляют с использованием следующего выражения:
IR=I·cos(ГЦУ)-Q·sin(ГЦУ)
QR=I·sin(ГЦУ)+Q·cos(ГЦУ) ,
где обозначение ГЦУ представляет собой значение из таблицы 424, полученное на основании сигнала ГЦУ 420, осуществляющего генерацию несущей. На Фиг.11 проиллюстрирован вариант осуществления ГЦУ 1100, осуществляющего генерацию несущей, например, ГЦУ 420, осуществляющего генерацию несущей (Фиг.4). Когда подан разрешающий сигнал 910, то ГЦУ 1100, осуществляющий генерацию несущей, сохраняет фазу опорного сигнала для соответствующего канала, например для первого канала, путем интегрирования значения частоты ГЦУ, осуществляющего генерацию несущей (доплеровский сдвиг масштабированного сигнала) в регистре 1112 с использованием схемы 1110 суммирования и накапливающего сумматора 1114 фазы. Дробную фазу несущей и опорный код приемника для разнесения сигнала по спектру смешивают с входными данными из радиочастотной части схемы для получения результатов измерения синфазной I и квадратурной Q компонент корреляции. Результаты измерения I и Q компонент используют в цепях обратной связи для создания значения частоты ГЦУ и дробной доли или дробной фазы 1116 несущей. Частоту обратной связи или дробную фазу 1116 несущей используют для замыкания контуров отслеживания частоты или фазы, которыми являются, например, контур автоматической подстройки частоты, синфазно-квадратурная схема восстановления несущей (схема Костаса (Costas)) или контур фазовой автоподстройки частоты. Управляющая программа может обновлять частоту ГЦУ, осуществляющего генерацию несущей, с любой частотой, равной одному разу в миллисекунду или более медленной. Частота обновления контура является конструктивным параметром контура отслеживания. Например, типичные частоты обратной связи равны, приблизительно, 1/10 ширины полосы частот контура. Более высокие частоты обратной связи увеличивают нагрузку при обработке, но могут оказывать лишь незначительное влияние на рабочие характеристики контура. Частоты обратной связи меньшие, чем 1/10 ширины полосы частот контура, могут приводить к срыву синхронизации или к увеличению шумов в контуре в динамических условиях.
Интегрирование фазы опорного сигнала или фазы несущей осуществляют с использованием накапливающего сумматора 1114 фазы. Предполагают, что фазовый угол несущей равен нулю в момент включения соответствующего канала на соответствующем фронте тактового импульса генератора опорной частоты. В действительности, в момент включения фаза не равна нулю, но соответствующая ошибка отслеживания будет отражена в I-выборках и в Q-выборках. Отслеживание фазы несущей обеспечит исправление фазового угла опорного сигнала. После того, как соответствующий канал включен, и до тех пор, пока он не будет выключен, 32-разрядное значение фазы ГЦУ, осуществляющего генерацию несущей частоты, добавляют в 32-разрядный накапливающий сумматор 1114 фазы в каждом периоде тактовых импульсов. Младший значащий бит фазы несущей соответствует 2-32 периодам от периода несущей. Младший значащий бит регистра 1112 для частоты ГЦУ, осуществляющего генерацию несущей, соответствует 2-32 периодам несущей в каждом тактовом импульсе. Если тактовая частота в устройстве 400 обработки сигналов (Фиг.4) равна 40,9216 МГц, то младший значащий бит регистра 1112 для частоты ГЦУ, осуществляющего генерацию несущей, эквивалентен 0,0095278 Гц (104,96 бита на Гц), а диапазон значений в регистре 1112 составляет от 0 до 40,9212589 МГц. Вследствие преднамеренного сдвига частоты генератора опорной частоты, описание которого приведено выше, доплеровский сдвиг всегда является положительным.
Конфигурация и весовые коэффициенты битов при вращениях фазы в комплексной области зависят от таблицы 424 синусов/косинусов (Фиг.4), которую используют для вращений фазы. В таблице III проиллюстрирована 5-битовая реализация 11·косинус/11·синус. Таблица III проиндексирована с использованием четырех старших значащих битов накапливающего сумматора 1114 фазы. Старшие значащие биты из 4 битов имеют весовой коэффициент, равный 0,5 полного круга, а младший значащий бит имеет весовой коэффициент, равный 1/16 полного круга, или 22,5 градусам. Среднее значение амплитуды целочисленных значений в таблице III равно 10,96. Мощность в неосновной составляющей преобразования Фурье таблицы III является меньшей, чем 0,1 дБ, поэтому таблица III вносит пренебрежимо малые потери при обработке.
Вариант осуществления таблицы 424 синусов/косинусов (Фиг.4)
(в градусах)
В схеме 1100 ГЦУ, осуществляющего генерацию несущей, переполнение накапливающего сумматора 1114 фазы указывает то, что произошло накопление интегрированного доплеровского сдвига в течение одного периода. Регистр 1118 подсчета периодов несущей подсчитывает переполнения и осуществляет вывод полной фазы 1120 несущей. В качестве результата измерения разности фазы несущей могут быть использованы конечные разности результатов последовательных измерений, где интервал интегрирования первоначально установлен равным нулю, вследствие чего значение, проинтегрированное по этому интервалу, соответствует изменению фазы.
На Фиг.13 проиллюстрирован вариант осуществления операций, выполняемых в спутниковом навигационном устройстве. Производят прием сигнала, содержащего, по меньшей мере, один сигнал с разнесением по спектру из первого спутника (операция 1312). Определяют коэффициент усиления для усиления сигнала с использованием такого первого не равного нулю порогового значения дискретизации, при котором 2/3 выборок не равны нулю (операция 1314). Производят выборку и дискретизацию сигнала с использованием второго не равного нулю порогового значения дискретизации, которое равно удвоенному первому не равному нулю пороговому значению дискретизации. Некоторые варианты осуществления изобретения могут содержать меньшее количество операций или дополнительные операции, порядок выполнения операций может быть изменен, и/или две или большее количество операций могут быть объединены.
На Фиг.12 проиллюстрирован вариант осуществления устройства 1210, например, устройства 110 (Фиг.1), в глобальной спутниковой навигационной системе (ГСНС). Устройство 1210 содержит входную схему 1212, устройство 1214 обработки сигналов, которым является, например, устройство 342 обработки сигналов (Фиг.3A), по меньшей мере, один процессор 1216 и запоминающее устройство 1218. Запоминающее устройство 1218, которое может содержать быстродействующее оперативное запоминающее устройство, а также может содержать энергонезависимое запоминающее устройство, например, одно или большее количество запоминающих устройств на магнитных дисках, ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство) и/или ЭСППЗУ на основе флэш-памяти, содержит операционную систему 1220 и, по меньшей мере, один программный модуль 1236, выполняемый процессором 1216. По меньшей мере, один программный модуль 1236 содержит команды и/или файлы, соответствующие следующим схемам: схеме 1222 АРУ, аналого-цифровому преобразователю 1224, схеме 1228 коррекции смещения постоянной составляющей, схеме 1230 демодуляция, схеме 1232 вращения фазы, устройству 1238 кодирования/декодирования для ГСНС и схеме 1240 синхронизации несущей и кода. Аналого-цифровой преобразователь 1224 содержит одно или большее количество соответствий 1226. Схема 1232 вращения фазы содержит таблицу 1234 синусов/косинусов. Программный модуль 1236 может содержать необязательное средство коррекции многолучевого распространения (например, средство двойной дельта-коррекции, стробируемый коррелятор и импульсный апертурный коррелятор) и/или средство вычисления многолучевого распространения. Программный модуль 1236 также может содержать команды для регулировки ПЧ, частот фильтров, смесителей и/или гетеродина в одном ли в большем количестве каналов, например, в первом канале, и/или в одной или в большем количестве схем подканалов, например, в схеме 300 подканала (Фиг.3A). Некоторые варианты осуществления изобретения могут содержать более одного процессора 1216. В других вариантах осуществления изобретения устройство 1210 может содержать специализированную интегральную схему (ASIC), и в этой специализированной интегральной схеме (ASIC) могут быть реализованы некоторые или все функциональные возможности, по меньшей мере, одного программного модуля 1236, выполняемого процессором 1216.
В приведенном выше описании в пояснительных целях была использована конкретная терминология для обеспечения полного понимания настоящего изобретения. Однако для специалиста в данной области техники очевидно, что для практической реализации изобретения эти конкретные подробности не требуются. Варианты осуществления изобретения были выбраны и описаны таким образом, чтобы обеспечить наилучшее объяснение принципов настоящего изобретения и областей его практического применения для того, чтобы, тем самым, предоставить возможность другим специалистам в данной области техники наилучшим образом использовать изобретение и различные варианты его осуществления с различными видоизменениями, подходящими для конкретного предполагаемого его использования. Следовательно, подразумевают, что изложенное выше раскрытие сущности изобретения не является исчерпывающим или ограничивающим изобретение точными его вариантами, раскрытыми здесь. С учетом вышеизложенной идеи изобретения возможно множество его модификаций и изменений.
Подразумевают, что объем патентных притязаний настоящего изобретения определяется приведенной ниже формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРХИТЕКТУРА ОБРАБОТКИ СИГНАЛОВ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2417382C2 |
| ГЕНЕРАТОР АДАПТИВНЫХ КОДОВ ДЛЯ СПУТНИКОВЫХ НАВИГАЦИОННЫХ ПРИЕМНЫХ УСТРОЙСТВ | 2007 |
|
RU2444745C2 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| АДАПТАЦИЯ ПРИРОСТА ПОДКАНАЛА ПЕРЕДАЧИ В СИСТЕМЕ С НЕЙТРАЛИЗАЦИЕЙ ВЗАИМНОЙ ПОМЕХИ | 2005 |
|
RU2373646C2 |
| СОВМЕСТНОЕ ПОДАВЛЕНИЕ ПОМЕХ В КАНАЛЕ ПЕРЕДАЧИ ПИЛОТ-СИГНАЛОВ, В КАНАЛЕ ПЕРЕДАЧИ СЛУЖЕБНЫХ СИГНАЛОВ И В КАНАЛЕ ТРАФИКА | 2005 |
|
RU2387077C2 |
| Способ обнаружения, оценки параметров и подавления имитационных помех и навигационный приемник с устройством обнаружения, оценки параметров и подавления имитационных помех | 2020 |
|
RU2737948C1 |
| Приемник аппаратуры потребителей сигналов глобальных спутниковых навигационных систем | 2017 |
|
RU2649879C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ДАННЫХ, СИСТЕМА И ПРИЕМНИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2214049C2 |










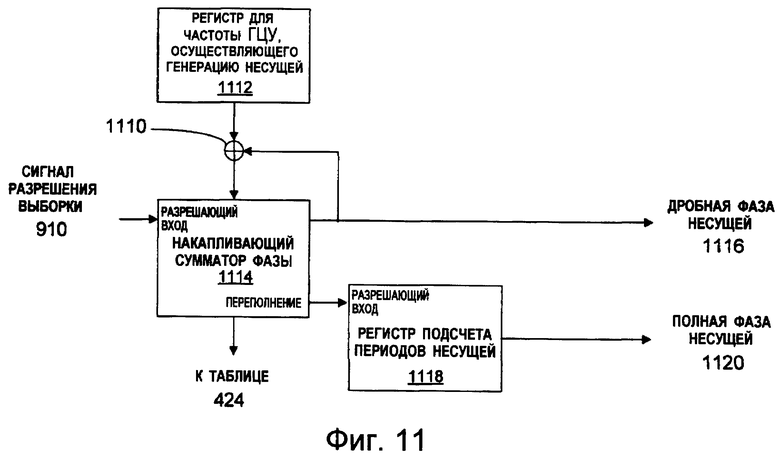



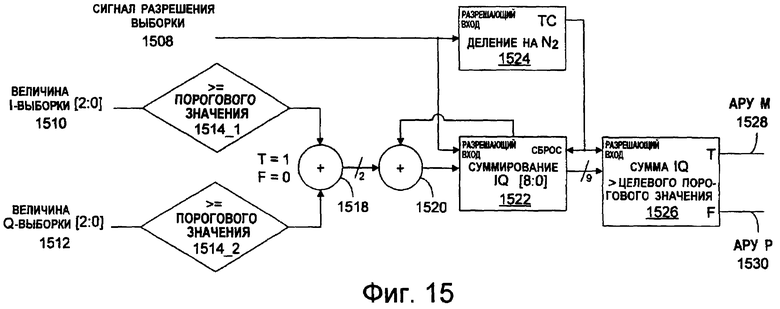
Изобретение относится к спутниковым навигационным системам. Техническим результатом является создание усовершенствованной схемы регистрации с защитой от помех в приемниках глобальной спутниковой навигационной системы (ГСНС). Результат достигается тем, что спутниковое навигационное устройство (110) содержит универсальный приемник (200) радиочастот (РЧ). Приемник (200) принимает сигнал (114), содержащий, по меньшей мере, первый сигнал (210) с разнесением по спектру из первого спутника. Приемник (200) имеет первый канал, который содержит аналого-цифровой преобразователь (АЦП) (338), предназначенный для выборки и дискретизации сигнала, и схему (330) автоматической регулировки усиления (АРУ), предназначенную для регулировки усиления сигнала (114). Аналого-цифровой преобразователь (338) имеет первое не равное нулю пороговое значение дискретизации и второе не равное нулю пороговое значение дискретизации. Схема (330) АРУ может регулировать коэффициент усиления в соответствии с первым не равным нулю пороговым значением дискретизации. Коэффициент усиления может соответствовать первой заранее заданной вероятности наличия выборки, не равной нулю, а второе не равное нулю пороговое значение дискретизации может соответствовать второй заранее заданной вероятности наличия выборки, не равной нулю. 3 н.п. и 23 з.п. ф-лы, 16 ил, 3 табл.
1. Спутниковое навигационное устройство, содержащее:
приемник, который принимает сигнал, содержащий, по меньшей мере, первый сигнал с разнесением по спектру из первого спутника, при этом приемник имеет первый канал, а этот первый канал содержит:
аналого-цифровой преобразователь для выборки и дискретизации сигнала, при этом аналого-цифровой преобразователь имеет первое не равное нулю пороговое значение дискретизации и второе не равное нулю пороговое значение дискретизации; и
схему автоматической регулировки усиления для регулировки коэффициента усиления сигнала,
при этом коэффициент усиления определен при первом не равном нулю пороговом значении дискретизации для создания первой заранее заданной вероятности наличия выборки, не равной нулю, а второе не равное нулю пороговое значение дискретизации соответствует второй заранее заданной вероятности наличия выборки, не равной нулю.
2. Спутниковое навигационное устройство по п.1, в котором усиление сигнала с использованием коэффициента усиления и дискретизация сигнала с использованием второго не равного нулю порогового значения дискретизации уменьшают влияние сигнала помех на приемник при произвольном отношении мощности сигнала помех к мощности шума приемника.
3. Спутниковое навигационное устройство по п.1, в котором аналого-цифровой преобразователь осуществляет вывод значений, содержащих такое количество бит, которое выбрано из группы, состоящей из 2, 3, 4 и 5.
4. Спутниковое навигационное устройство по п.3, в котором первое не равное нулю пороговое значение дискретизации соответствует первому диапазону выходных значений, а второе не равное нулю пороговое значение дискретизации соответствует второму диапазону выходных значений.
5. Спутниковое навигационное устройство по п.1, дополнительно содержащее схему коррекции смещения постоянной составляющей, предназначенную, по существу, для уменьшения смещения постоянной составляющей в сигнале.
6. Спутниковое навигационное устройство по п.1, в котором в аналого-цифровом преобразователе используют справочную таблицу, причем справочная таблица содержит первое соответствие и второе соответствие, и в котором не равные нулю выборки в первом соответствии определены на основании первого не равного нулю порогового значения дискретизации, а не равные нулю выборки во втором соответствии определены на основании второго не равного нулю порогового значения дискретизации.
7. Спутниковое навигационное устройство по п.1, дополнительно содержащее схему преобразования с понижением частоты, причем эта схема преобразования с понижением частоты осуществляет преобразование сигнала из сигнала на первой несущей частоте в сигнал в полосе частот, близкой к полосе частот исходных сигналов, а сигнал в полосе частот, близкой к полосе частот исходных сигналов, содержит сигнал на второй несущей частоте, по существу, меньшей, чем одна четверть частоты выборки.
8. Спутниковое навигационное устройство по п.7, в котором вторая несущая частота сигнала является меньшей, чем приблизительно 100 кГц.
9. Спутниковое навигационное устройство по п.7, дополнительно содержащее схему фазовращателя для выполнения вращения фазы в комплексной области для дискретизированных квадратурных выборок сигнала в полосе частот, близкой к полосе частот исходных сигналов, таким образом, чтобы остаточное смещение было распределено, по существу, равномерно по фазовым углам от 0 до 360° и следовательно чтобы его среднее значение было, по существу, равным нулю в интервале интегрирования, соответствующем первому сигналу с разнесением по спектру.
10. Спутниковое навигационное устройство по п.9, в котором в схеме фазовращателя для выполнения вращения фазы в комплексной области используют справочную таблицу.
11. Спутниковое навигационное устройство по п.1, дополнительно содержащее схему гашения, при этом схема гашения, когда она включена, суммирует несколько событий, когда величина соответствующей выборки сигнала превышает пороговое значение в течение некоторого промежутка времени, и отключает приемник, если количество событий превышает некоторое значение.
12. Спутниковое навигационное устройство по п.11, в котором упомянутое пороговое значение является в восемь раз большим, чем первое не равное нулю пороговое значение дискретизации.
13. Спутниковое навигационное устройство, содержащее:
механизм приемника, который принимает сигнал, содержащий, по меньшей мере, первый сигнал с разнесением по спектру из первого спутника, причем этот механизм приемника имеет первый канал, а первый канал содержит:
первое средство для выборки и дискретизации сигнала, причем первое средство имеет первое не равное нулю пороговое значение дискретизации и второе не равное нулю пороговое значение дискретизации;
второе средство для усиления сигнала, причем это второе средство имеет коэффициент усиления, определенный при первом не равном нулю пороговом значении дискретизации,
при этом коэффициент усиления соответствует первой заранее заданной вероятности наличия выборки, не равной нулю, а второе не равное нулю пороговое значение дискретизации соответствует второй заранее заданной вероятности наличия выборки, не равной нулю.
14. Способ, содержащий следующие операции:
принимают сигнал с использованием приемника, причем этот сигнал содержит, по меньшей мере, первый сигнал с разнесением по спектру, из первого спутника;
определяют коэффициент усиления для усиления сигнала с использованием первого не равного нулю порогового значения дискретизации; и
выполняют выборку и дискретизацию сигнала с использованием второго не равного нулю порогового значения дискретизации,
при этом коэффициент усиления соответствует первой заранее заданной вероятности наличия выборки, не равной нулю, а второе не равное нулю пороговое значение дискретизации соответствует второй заранее заданной вероятности наличия выборки, не равной нулю.
15. Способ по п.14, в котором усиление сигнала с использованием коэффициента усиления и дискретизация сигнала с использованием второго не равного нулю порогового значения дискретизации уменьшают влияние сигнала помех на приемник при произвольном отношении мощности сигнала помех к мощности собственного шума приемника.
16. Способ по п.14, в котором при дискретизации осуществляют вывод значений, содержащих такое количество бит, которое выбрано из группы, состоящей из 2, 3, 4 и 5.
17. Способ по п.16, в котором первое не равное нулю пороговое значение дискретизации соответствует первому диапазону выходных значений, а второе не равное нулю пороговое значение дискретизации соответствует второму диапазону выходных значений.
18. Способ по п.14, дополнительно содержащий существенное уменьшение смещения постоянной составляющей в сигнале.
19. Способ по п.14, в котором дискретизация дополнительно содержит установление первого соответствия и второго соответствия, причем не равные нулю выборки в первом соответствии определены на основании первого не равного нулю порогового значения дискретизации, а не равные нулю выборки во втором соответствии определены на основании второго не равного нулю порогового значения дискретизации.
20. Способ по п.19, в котором для установления первого соответствия и второго соответствия используют справочную таблицу.
21. Способ по п.14, дополнительно содержащий преобразование сигнала из сигнала на первой несущей частоте в сигнал в полосе частот, близкой к полосе частот исходных сигналов, при этом сигнал в полосе частот, близкой к полосе частот исходных сигналов, содержит сигнал на второй несущей частоте, по существу, меньшей, чем одна четверть частоты выборки.
22. Способ по п.21, в котором вторая несущая частота сигнала является меньшей, чем приблизительно 100 кГц.
23. Способ по п.21, дополнительно содержащий вращение фазы в комплексной области для дискретизированных квадратурных выборок сигнала в полосе частот, близкой к полосе частот исходных сигналов, таким образом, чтобы остаточное смещение было распределено, по существу, равномерно по фазовым углам от 0 до 360° и следовательно чтобы его среднее значение было, по существу, равным нулю в интервале интегрирования, соответствующем первому сигналу с разнесением по спектру.
24. Способ по п.23, в котором операция выполнения вращения фазы в комплексной области дополнительно содержит вращение фазы в комплексной области с использованием справочной таблицы.
25. Способ по п.14, дополнительно содержащий суммирование нескольких событий, когда величина соответствующей выборки сигнала превышает пороговое значение в течение некоторого промежутка времени, и временно отключают приемник, если количество событий превышает некоторое значение.
26. Способ по п.25, в котором упомянутое пороговое значение является в восемь раз большим, чем первое не равное нулю пороговое значение дискретизации.
| US 6816539 B1, 09.11.2004 | |||
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| JP 9127230 A, 16.05.1997. | |||

