ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Область техники
Изобретение, раскрытое в данном документе, относится к обработке сигналов навигации, принимаемых в местоположении.
Информация:
Спутниковая система позиционирования (SPS) типично содержит систему передатчиков, расположенных, чтобы дать возможность объектам определить их положения на земле на основе, по меньшей мере частично, сигналов, принятых от передатчиков. Такой передатчик типично передает сигнал, отмеченный с помощью повторяющегося кода псевдослучайного шума (PN) из установленного множества элементарных сигналов, и может располагаться на станциях наземного управления, абонентском оборудовании и/или космических кораблях. В конкретном примере такие передатчики могут располагаться на земных орбитальных спутниках. Например, спутник в совокупности глобальной навигационной спутниковой системы (GNSS), например, системы глобального позиционирования (GPS), Галилео, Глонасс или Компас, могут передавать сигнал, отмеченный с помощью PN-кода, который отличается от PN-кодов, передаваемых другими спутниками в совокупности.
Для оценки местоположения в приемнике навигационная система может определять измерения псевдодиапазона для спутников "в пределах видимости" приемника, используя хорошо известные методики на основе, по меньшей мере частично, обнаружения PN-кодов в сигналах, принятых спутником. Такой псевдодиапазон для спутника может быть определен на основе, по меньшей мере частично, фазы кода, обнаруженной в принятом сигнале, отмеченном с помощью PN-кода, ассоциированного со спутником во время процесса получения принятого сигнала в приемнике. Для того чтобы получить принятый сигнал, навигационная система типично коррелирует принятый сигнал с локально формируемым PN-кодом, ассоциируемым со спутником. Например, такая навигационная система типично коррелирует такой принятый сигнал с множеством вариантов, сдвинутых по коду и/или времени такого локально формируемого PN-кода. Обнаружение конкретного варианта, сдвинутого по времени и/или коду, дающего результат корреляции с самой высокой сигнальной мощностью, может указывать фазу кода, ассоциируемую с принятым сигналом для использования в измерении псевдодиапазона, как рассмотрено выше.
При обнаружении фазы кода сигнала, принятого от GNSS-спутника, приемник может создавать многочисленные гипотезы псевдодиапазона. Используя дополнительную информацию, приемник может исключать такие гипотезы псевдодиапазона в сущности для снижения неопределенности, ассоциируемой с верным измерением псевдодиапазонов. С достаточной точностью в знании временного согласования сигнала, принимаемого от GNSS-спутника, некоторые или все ошибочные гипотезы псевдодиапазона могут быть исключены.
Фиг.1 иллюстрирует применение SPS-системы, посредством чего мобильная станция 100 (MS) в системе беспроводной связи принимает передачи от спутников 102a, 102b, 102c, 102d в линии прямой видимости на MS 100 и извлекает измерения времени из четырех или более передач. MS 100 может предоставлять такие измерения объекту 104 определения местоположения (PDE), который из измерений определяет положение станции. Альтернативно, абонентская станция 100 может определять его собственное положение из этой информации.
MS 100 может искать передачу из конкретного спутника, коррелируя PN-код для спутника с принятым сигналом. Принятый сигнал типично содержит комбинацию передач из одного или более спутников в пределах линии прямой видимости в приемник в MS 100 при присутствии шума. Корреляция может осуществляться по гипотезам диапазона фаз кода, известным как окно Wcp поиска фазы кода, и по гипотезам диапазона частоты Доплера, известного как окно WDOPP поиска Доплера. Как указано выше, такие гипотезы о фазах кода типично представлены как диапазон сдвигов PN-кода. Кроме того, гипотезы о частоте Доплера типично представлены как элементы разрешения по частоте Доплера.
Корреляция типично осуществляется по времени "I" интеграции, которое может быть выражено как результат Nc и M, где Nc является когерентным временем интеграции и M является числом когерентных интеграций, которые комбинированы некогерентно. Для конкретного PN-кода значения корреляции типично ассоциируются с соответствующими сдвигами PN-кода и элементами разрешения Доплера для определения двумерной функции корреляции. Максимумы функции корреляции определяются и сравниваются с заранее определенной пороговой величиной шума. Пороговая величина типично выбирается так, чтобы вероятность ложной тревоги, вероятность ошибочного обнаружения спутниковой передачи находилась на уровне или ниже заранее определенного значения. Измерение времени для спутника типично извлекается из местоположения самого раннего некрайнего дифракционного максимума вдоль с размерности фазы кода, который равен или превышает пороговую величину. Измерение Доплера для абонентской станции может извлекаться из местоположения самого раннего некрайнего пика вместе с размерности частоты Доплера, который равен или превышает пороговую величину.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничивающие и неисчерпывающие признаки описываются со ссылкой на последующие чертежи, при этом аналогичные номера ссылок относятся к аналогичным частям на всех различных чертежах.
Фиг.1 является схематичным представлением спутниковой системы позиционирования (SPS) согласно одному аспекту.
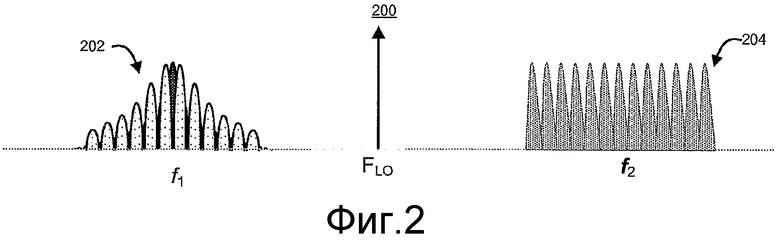
Фиг.2 показывает спектры, ассоциируемые с сигналами SPS, возникающих в многочисленных GNSS' согласно одному аспекту.
Фиг.3 является схематичным представлением приемника, приспособленного для обработки SPS-сигналов, принятых от многочисленных GNSS' согласно одному варианту осуществления.
Фиг.4 является схематичным представлением комплексного преобразователя с понижением по частоте, приспособленного для предоставления пониженных по частоте выборок для обработки специфичной для GNSS согласно одному варианту осуществления.
Фиг.5 является схематичным представлением двумерной области, которую необходимо найти для обнаружения сигнала, передаваемого из космического корабля согласно одному аспекту.
Фиг.6 является схематичным представлением системы для обработки сигналов для определения местоположения согласно одному аспекту.
Фиг.7 является схематичным представлением мобильной станции согласно одному аспекту.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном конкретном варианте осуществления приемник приспособлен для приема и обработки сигналов спутниковой системы позиционирования (SPS), передаваемых при различных частотах несущей. В одном аспекте SPS-сигналы, передаваемые по различным частотам несущей, преобразуются с понижением по частоте для обработки в тракте единственного приемника. Необходимо понимать, тем не менее, что это лишь один пример варианта реализации и что заявленный предмет изобретения не ограничен этим конкретным вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Ссылка по всему этому описанию изобретения на "один пример", "один признак", "пример" или "один признак" означает, что конкретный признак, структура или характеристика, описанная в связи с признаком и/или примером, включена в, по меньшей мере, один признак и/или пример заявленного предмета изобретения. Таким образом, появления фразы "в одном примере", "пример", "в одном признаке" либо "признак" в различных местах по этому описанию изобретения не обязательно все указывают на один и тот же признак и/или пример. Кроме того, конкретный признак, структуры либо характеристики могут комбинироваться в одном либо более примерах и/или признаках.
Методики, описанные в данном документе, могут быть реализованы с помощью различных средств, зависящих от использования согласно конкретным признакам и/или примерам. Например, такие методики могут реализовываться в аппаратном обеспечении, программно-аппаратном обеспечении, программном обеспечении и/или их сочетании. Для варианта осуществления в аппаратном обеспечении, например, обрабатывающий блок может быть реализован в одном или более специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных обрабатывающих устройствах (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, спроектированных выполнять функции, описанные в данном документе или их сочетании.
"Космический корабль" (SV), как упоминается в данном документе, относится к объекту, который может передавать сигналы в приемники на поверхности земли. В одном конкретном примере подобный SV может содержать геостационарный спутник. Альтернативно, SV может содержать спутник, перемещающийся по орбите и передвигающийся относительно стационарного положения на земле. Тем не менее, это только простые примеры SV и заявленный предмет изобретения не ограничен в этих отношениях.
Определение местоположения и/или методики оценки, описанные в данном документе, могут использоваться для различных сетей беспроводной связи, например, беспроводной глобальной сети (WWAN), беспроводной локальной сети (WLAN), беспроводной персональной сети (WPAN) и так далее. Термины "сеть" и "система" могут использоваться взаимозаменяемо в данном документе. WWAN может быть CDMA-сетью (множественный доступ с кодовым разделением каналов), TDMA-сетью (множественный доступ с временным разделением каналов), FDMA-сетью (множественный доступ с частотным разделением каналов), OFDMA-сетью (множественный доступ с ортогональным частотным разделением каналов), SC-FDMA-сеть (множественный доступ с частотным разделением с единственной несущей) и так далее. CDMA-сеть может реализовывать одну или более технологий радиодоступа (RAT), например, cdma2000, W-CDMA (широкополосный CDMA), чтобы назвать только несколько радиотехнологий. В данном документе cdma2000 может включать в себя технологии, реализованные согласно стандартам IS-95, IS-2000 и IS-856. TDMA-сеть может реализовывать глобальную систему мобильной связи (GSM), цифровую улучшенную систему мобильных телефонов (D-AMPS) либо какую-либо другую RAT. GSM и W-CDMA описаны в документах от организации, называемой "проект партнерства третьего поколения" (3GPP). cdma2000 описывается в документах от организации, называемой "проект партнерства третьего поколения 2" (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. Например, WLAN может содержать сеть IEEE 802.11x и WPAN может содержать сеть Bluetooth, например, IEEE 802.15x. Такие методики определения местоположения, описанные в данном документе, могут также использоваться для любого сочетания WWAN, WLAN и/или WPAN.
Согласно примеру устройство и/или система может оценивать свое местоположение на основе, по меньшей мере частично, сигналов, принятых из SV. В частности, такое устройство и/или система могут получить измерения "псевдодиапазона", которые содержат аппроксимации расстояний между ассоциированными SV и приемником спутниковой навигации. В конкретном примере такой псевдодиапазон может определяться в приемнике, который может обрабатывать сигналы от одного или более SV как часть спутниковой системы позиционирования (SPS). Для определения своего местоположения приемник спутниковой навигации может получать измерения псевдодиапазона для трех или более спутников, а также их положения в момент передачи.
Методики, описанные в данном документе, могут использоваться с любым из нескольких SPS и/или комбинаций SPS. Кроме того, такие методики могут использоваться с системами определения позиционирования, которые используют псевдолиты или комбинации спутников и псевдолитов. Псевдолиты могут содержать наземные передатчики, которые транслируют PN-код или другой код диапазона (например, аналогично сотовому сигналу GPS либо CDMA), модулируемого по L-диапазону (или другой частоте) сигнала несущей, который может синхронизироваться во времени. Такому передатчику может назначаться уникальный PN-код так, чтобы разрешить идентификацию с помощью удаленного приемника. Псевдолиты являются полезными в ситуациях, где GPS-сигналы от орбитальных спутников могут быть недоступными, например, тоннели, шахты, строения, городские каньоны и другие закрытые области. Другой вариант осуществления псевдолитов известен как радиомаяки. Термин "спутник", как используется в данном документе, направлен включать в себя псевдолиты, эквиваленты псевдолитов и возможно другое. Термин "SPS-сигналы", как используется в данном документе, направлен включать в себя похожие на SPS-сигналы от псевдолитов либо эквивалентов псевдолитов.
Глобальная спутниковая навигационная система (GNSS), как упоминается в данном документе, относится к SPS, которая содержит SV, передающие синхронизированные навигационные сигналы согласно общему формату сигнализации. Такая GNSS может содержать, например, совокупность SV в синхронизированных орбитах для передачи навигационных сигналов в местоположения по обширной части земной поверхности одновременно из многочисленных SV в совокупности. Такие отдельные GNSS могут содержать, например, глобальную систему позиционирования (GPS) NAVSTAR, управляемую Министерством обороны США, планируемую систему Galileo, разрабатываемую европейской системой спутниковой навигации для управления европейским союзом и европейским космическим агентством, система Glonass, разрабатываемая Советским Союзом и теперь управляемая правительством России, и планируемая система Compass, разрабатываемая правительством Китая. Тем не менее, следует понимать, что это лишь примеры GNSS, которые могут использоваться в конкретных вариантах осуществления, и что другие GNSS, которые включают в себя GNSS, реализуемые в будущем, могут использоваться без отклонения от заявленного предмета изобретения.
SV, который является элементом конкретной совокупности GNSS, типично передает навигационные сигналы в формате, который является уникальным для конкретного формата GNSS. Соответственно, методики для получения сигнала навигации, передаваемые SV в первой GNSS, могут изменяться для получения навигационного сигнала, передаваемого SV во втором GNSS. В конкретном примере, хотя заявленный предмет изобретения не ограничен в этом отношении, следует понимать, что GPS, Galileo и Glonass, каждая представляет GNSS, которая является отличающейся от других двух, называемых SPS. Тем не менее, это лишь примеры SPS, ассоциируемые с отличающимися GNSS, и заявленный предмет изобретения не ограничен в этом отношении.
Существование многочисленных GNSS разрешает приемнику принимать SPS-сигналы от многочисленных GNSS, если SV таких многочисленных GNSS находятся в пределах видимости приемника. Как таковое, существование SV из различных GNSS может предусматривать улучшенное глобальное покрытие и множество возможностей для осуществления измерений псевдодиапазона для SV, расположенных в известных местоположениях в совокупностях GNSS. Соответственно, навигационный приемник, который может обрабатывать SPS-сигналы от различных GNSS, может иметь преимущество возможности определять местоположения на основе, по меньшей мере частично, измерений псевдодиапазона для таких SV других GNSS. В данном документе SPS-сигналы из различных GNSS могут использовать различные форматы сигнализации, приемник может использовать различную обработку принятого SPS-сигнала для получения измерения псевдодиапазона на основе конкретной GNSS, передающей SPS-сигнал. Это дополнительно осложняется передачей SPS-сигналов из другой GNSS по различным частотам несущей. В данном документе использование независимой и выделенной обработки для SPS-сигналов, передаваемых каждой GNSS, может пошагово добавляться к стоимости производства, потреблению мощности и весу, ассоциируемому с навигационными приемниками.
Фиг.2 показывает спектры, ассоциируемые с сигналами SPS, возникающими в многочисленных GNSS согласно одному аспекту. В данном документе SPS-сигнал, принимаемый от первой GNSS, GNSS1 может иметь спектр 202, который центрируется вокруг первой частоты f1 несущей, в то время как второй SPS-сигнал, принимаемый от второй другой GNSS, GNSS2, может иметь спектр 204, который центрируется вокруг второй частоты f2 несущей. В одном конкретном варианте осуществления спектры 202 и 203 могут приниматься в единственном канале приемника и/или единственном тракте приемника, чтобы позволить определение измерения псевдодиапазона для первого SV в GNSS1 и определение второго SV в GNSS2. Соответственно, эти измерения псевдодиапазона, получаемые из SPS-сигналов, принимаемых из различных GNSS, могут использоваться для определения местоположения приемника.
В одном аспекте единственный канал приемника и/или единственный тракт приемника может содержать единственные последовательности компонентов приемника для одновременной обработки многочисленных SPS-сигналов, принимаемых из ассоциированных многочисленных GNSS. В конкретном варианте осуществления такой единственный канал приемника и/или единственный тракт приемника могут содержать (радиочастотный) РЧ-фильтр, за которым следует каскад преобразования с понижением частоты для смешения многочисленных SPS-сигналов, принимаемых из многочисленных GNSS с гетеродином, и один или более фильтров для фильтрования сигналов, извлекаемых из многочисленных SPS-сигналов. Тем не менее, это лишь пример единственного канала приемника и/или единственного тракта приемника, и заявленный предмет изобретения не ограничен в этом отношении.
В одном варианте осуществления SPS-сигналы, принятые из GNSS1 и GNSS2, могут обрабатываться в единственном канале приемника, смешивая принятые сигналы с сигналом гетеродина (LO), который имеет частоту FLO, которая определяется на основе, по меньшей мере частично, f1 и f2. Как показано на Фиг.3, согласно конкретному варианту осуществления приемник 300 может принимать SPS-сигналы от GNSS1 и GNSS2 в единственной (RF) РЧ-антенне 302, полосовой (RF) РЧ-фильтр, такой как фильтр 304 поверхностных акустических волн (SAW), и малошумящий усилитель 306. Принятые SPS-сигналы могут затем комплексно преобразоваться с понижением частоты в промежуточные частоты посредством смешения принятых сигналов с сигналом LO, как показано.
В этом контексте "преобразование с понижением по частоте" может относиться к преобразованию входящего сигнала, который имеет первую частотную характеристику, в выходной сигнал, который имеет вторую частотную характеристику. В одном конкретном варианте осуществления, хотя заявленный предмет изобретения не ограничен в этом отношении, такое преобразование с понижением по частоте может содержать трансформацию первого сигнала во второй сигнал, где второй сигнал имеет частотную характеристику более низкой частоты, чем характеристика первого сигнала. В данном документе в конкретных примерах такое преобразование с понижением частоты может содержать трансформацию (RF) РЧ-сигнала в сигнал промежуточной частоты (IF) или преобразование IF-сигнала в сигнал основной полосы и/или информацию основной полосы. Тем не менее, это только простые примеры преобразования с понижением по частоте, и заявленный предмет изобретения не ограничен в этом отношении.
В конкретном варианте осуществления с помощью выбора FLO в почти средней точке между f1 и f2 участки сигналов, преобразованные с понижением по частоте из спектров 202 и 204, могут главным образом покрываться полосовыми фильтрами 308 и 310. В данном документе, например, выбор конкретной частоты для FLO может привести в компоненту частоты зеркального канала одного преобразованного с понижением частоты SPS-сигнала, который может, главным образом, перекрывать желаемый компонент сигнала другого SPS-сигнала, преобразованного с понижением частоты. В конкретных вариантах осуществления воздействие такого перекрытия можно избежать без ослабления компонентов частоты зеркального канала до смешивания с LO. Следует понимать, тем не менее, что в других вариантах осуществления FLO может быть выбрана для нахождения где-либо еще, чем около средней точки между f1 и f2, и заявленный предмет изобретения не ограничен в этом отношении.
Синфазные и квадратурные компоненты, фильтруемые ассоциированными BPF 308 и 310, могут затем быть цифровым способом дискретизированы в ADC-схемах 312 и 314 (аналогово-цифровое преобразование) для предоставления цифровым образом дискретизированных синфазных и квадратурных компонентов для дополнительной обработки, как проиллюстрировано ниже. В данном документе ADC 312 и 314 могут приспосабливаться для дискретизации выходных сигналов BPF 308 и 310 при или выше частоты Найквиста комбинированного сигнала. Кроме того, проиллюстрированный в настоящее время вариант реализации включает в себя ADC 312 и 314 между первыми и вторыми этапами преобразования с понижением по частоте.
Следует понимать, тем не менее, что другие архитектуры могут быть реализованы без отклонения от заявленного предмета изобретения. В других вариантах осуществления, например, аналогово-цифровое преобразование может происходить вслед за вторичным преобразованием с понижением по частоте. Кроме того, это только просто примерные варианты осуществлений и заявленный предмет изобретения не ограничен в этих отношениях.
Кроме того, в альтернативных вариантах осуществления ADC 312 и 314 могут замещаться с помощью единственного комплексного ADC или с помощью единственного разделения во времени и/или мультиплексируемое ADC с помощью соответствующих задержек, которые должны совместно использоваться в трактах синфазного и квадратурного сигнала.
В конкретных вариантах осуществления GNSS1 и GNSS2 могут содержать любую из нескольких пар различных GNSS. В одном конкретном варианте осуществления, хотя заявленный предмет изобретения не ограничен в этом отношении, GNSS1 и GNSS2 могут выбираться из условия, чтобы f1 и f2 были близкими по частоте, чтобы дать возможность производства с низкими затратами SAW 304 и/или LNA 306, ограничивая рабочий диапазон частот. В этом документе, например, GNSS1 и GNSS2 могут содержать любую из нескольких пар, например, GPS L1 и Glonass L1 (где f1 ~ 1575 МГц и f2 ~ 1602 МГц), GPS L1 и Compass L1 (где f1 ~ 1575 МГц и f2~ 1590 или 1561 МГц), Galileo L1 и Glonass L1 (где f1~ 1575 МГц и f2 ~ 1602 МГц), GPS L2 и Glonass L2 (где f1 = 1228 МГц и f2 = 1246 МГц) и GPS L2 и Compass L2 (где f1 ~ 1228 МГц и f2~ 1269 или 1207 МГц). Следует тем не менее, понимать, что это лишь конкретные примеры пар GNSS, которые могут быть выбраны в конкретных вариантах осуществления, и заявленный предмет изобретения не ограничен какой-либо конкретной парой GNSS.
Хотя GNSS1 и GNSS2 могут выбираться так, чтобы f1 и f2 были близко по частоте (например, оба находящиеся в диапазоне L1, либо оба находящиеся в диапазоне L2), как проиллюстрировано выше в конкретных вариантах осуществления, заявленный предмет изобретения не ограничен в этом отношении. В альтернативных вариантах осуществления SPS-сигналы, передаваемые в более сильно разделенных частотах несущей, могут преобразовываться с понижением по частоте в общую промежуточную частоту в единственном канале приемника, как проиллюстрировано выше. В одном конкретном примере SV в совокупности GNSS может передавать многочисленные SPS-сигналы при различных частотах несущей и/или частотных диапазонов, таких как, например, частотных диапазонов L1 и L2 (в GPS, например, L1 расположен при 1575.42 МГц и L2 расположен при 1227.6 МГц). В данном документе следует понимать, следовательно, что методики, описанные в данном документе, могут быть применимы для обработки SPS-сигналов, принятых от той же самой GNSS, но передаваемые по различным частотным диапазонам (например, GPS-сигналы в L1 и L2). Следует также понимать, что результирующий составной сигнал может иметь большую полосу пропускания, таким образом, увеличивая частоту Найквиста для дискретизации в ADC 312 и 314.
В конкретных вариантах осуществления полоса пропускания BPF 308 и 310 могут центрироваться примерно в общей промежуточной частоте IF0 для обработки участков SPS-сигналов, принимаемых и от GNSS1, и от GNSS2. В дополнение к полосе пропускания BPF 308 и 310 могут быть реализованы, чтобы быть достаточно широкими, чтобы собрать достаточно информационных SPS-сигналов, принятых как от GNSS1, так и от GNSS2 без внедрения значительного шума вне диапазонов спектров 202 и 204. Дополнительно, BPF 308 и 310 могут выбираться, чтобы быть достаточно узкими, чтобы позволить дискретизацию с помощью ADC 312 и 314 при указанной скорости дискретизации (например, при почти частоте Найквиста) без существенного искажения.
Согласно конкретным вариантам осуществления дискретизированные синфазные и квадратурные компоненты, предоставленные ADCs 312 и 314, могут дополнительно обрабатываться согласно комплексному преобразованию 316 с понижением по частоте до специфичной для GNSS обработки в основной полосе в процессорах с 3181 по 318n GNSS. В одном варианте осуществления процессор 318j GNSS может использоваться для осуществления обработки в основной полосе для конкретной GNSS или ее участка. Например, возможно, что процессор 318i GNSS приспособлен для обработки SPS-сигналов согласно GPS L1, хотя другой процессор 318j GNSS может быть приспособлен для обработки SPS-сигналов согласно Galileo L1. В другом варианте осуществления SPS-сигналы, принятые из трех или более GNSS, могут обрабатываться с помощью ассоциированных процессоров 318 GNSS. В другом варианте осуществления отдельные процессоры 318 GNSS могут использоваться для отдельного повторения каждого из восьми преобразований с понижением по частоте для каждого из восьми отдельных поддиапазонов принятого сигнала Glonass.
В конкретных вариантах осуществления сигналы основной полосы другой GNSS1 в GNSSn могут быть ассоциированы с другими частотами гетеродина. Как таковое, преобразование 316 с понижением частоты, показанное на Фиг.3, может комбинировать различные частоты гетеродина с дискретизированными синфазными и квадратурными компонентами, предоставленными ADCs 312 и 314 для восстановления сигналов основной полосы, ассоциированной с другой GNSS1 по GNSSn. В конкретном примере схема преобразования с понижением частоты, как показано на Фиг.4, тем не менее, другие сигналы основной полосы ассоциируются с той же самой частотой гетеродина. В данном документе следует понимать, что конкретная схема преобразования с понижением частоты, показанная на Фиг.4, является лишь примером схемы преобразования с понижением частоты согласно конкретному варианту осуществления, и этот заявленный предмет изобретения не ограничен в этом отношении.
Фиг.4 показывает комплексное преобразование с понижением частоты согласно одному конкретному варианту осуществления комплексного преобразования 316 с понижением частоты, в котором комплексное преобразование с понижением частоты осуществляется для двух GNSS (например, n = 2 для GNSS1 и GNSS2) и синфазные и квадратурные выборки смешиваются и комбинируются, как показано, для предоставления выходных выборок для обработки согласно GNSS1 (GNSS1_I и GNSS1_Q) и выходных выборок для обработки согласно GNSS2 (GNSS2_I и GNSS2_Q). В данном документе частоты для LO_I1, LO_Q1, LO_I2 и LO_Q2 для конкретных GNSS могут зависеть от конкретно сигнализируемых смещений центральных частот поддиапазона, и промежуточные частоты, происходящие из смешения с LO в более раннем этапе преобразования с понижением частоты от РЧ до IF (промежуточная частота).
В этом конкретном варианте осуществления выходные сигналы LO_I1, LO_Q1, LO_I2 и LO_Q2 смесителя комбинируются с помощью сложения и/или вычитания для предоставления конкретных выходных выборок согласно конкретному варианту выбора системных параметров, таких как, например, частота FLO. Следует понимать, тем не менее, что выходные сигналы смесителя могут комбинироваться по-разному в других вариантах осуществления, и этот заявленный предмет изобретения не ограничен в этом отношении.
В конкретном варианте осуществления, проиллюстрированном на Фиг.4, где гетеродины для GNSS1 и GNSS2 очень близки или те же самые, частоты для LO_I1, LO_Q1, LO_I2 и LO_Q2 могут быть одинаковыми. По существу, конкретный вариант осуществления схемы комплексного преобразования с понижением по частоте, показанной на Фиг.4, может быть адаптирован для понижения по частоте первого и второго сигналов промежуточной частоты (IF) в ассоциированные первый и второй сигналы основной полосы. В данном документе только четыре умножителя частоты используются для комбинации первого и второго IF-сигналов с гетеродином для предоставления ассоциированных четырех выходных сигналов умножителя частоты. Сумматор первой пары предусматривает первый сигнал основной полосы на основе, по меньшей мере частично, четырех выходных сигналов умножителя частоты. Вторая пара сумматоров предусматривает второй сигнал основной полосы на основе, по меньшей мере частично, четырех выходных сигналов умножителя частоты.
В конкретных вариантах осуществления выходные выборки из комплексного преобразования 316 с понижением по частоте могут дополнительно обрабатываться до обработки, специфичной для GNSS. В одном конкретном варианте осуществления, используемом для обработки синфазных и квадратурных выборок для предоставления выходных выборок для обработки согласно Glonass, может использоваться дополнительная обработка для извлечения отдельных сигналов, которые являются мультиплексированными с разделением по частоте в SPS-сигнале, принятом от Glonass. В данном документе, например, выходные выборки GNSS2_I и GNSS2_Q для Glonass могут быть дополнительно обработаны для предоставления N-выходных выборок, ассоциируемых с N частотными поддиапазонами принятого SPS-сигнала. В данном документе, например, такая дополнительная обработка может содержать, например, цифровое преобразование Фурье и/или другие цифровые фильтры.
Как указано выше, выходные выборки, предусмотренные комплексным преобразованием 316 с понижением частоты, могут обрабатываться в основной полосе согласно специфичным требованиям к обработке сигналов GNSS для, например, определения измерений псевдодиапазона, для помощи в определении местоположения приемника. Как проиллюстрировано ниже согласно конкретному примеру, такая обработка в основной полосе может включать в себя определение измерения частоты Доплера и обнаружение фазы кода, ассоциированной с принятым SPS-сигналом.
Согласно примеру SV, видимый в приемнике, может быть ассоциирован с конкретным набором параметров окна поиска, которые задают двумерную область фазы кода и гипотез частоты Доплера, которые необходимо найти для SV. В одном варианте осуществления, проиллюстрированном на Фиг.5, параметры окна поиска для SV содержат размер окна поиска фазы кода, WIN_SIZECP, a центр окна фазы кода, WIN_CENTCP, размер окна поиска Доплера, WIN_SIZEDOPP и центр окна Доплера WIN_SIZEDOPP. В одном варианте осуществления эти параметры могут обозначаться с помощью сообщения помощи получения, предоставленного абонентской станцией с помощью PDE.
Двумерное пространство поиска для SV, проиллюстрированное на Фиг.5, показывает, что ось фазы кода является горизонтальной осью и ось частоты Доплера вертикальной осью, но это назначение является произвольным и может быть зарезервировано. Центр окна поиска фазы кода упоминается как WIN_CENTCP, и размер окна поиска фазы кода упоминается как WIN_SIZECP. Центр окна поиска частоты Доплера упоминается как WIN_CENTDOPP, и размер окна поиска частоты Доплера упоминается как WIN_SIZEDOPP.
Система для получения периодически повторяющихся сигналов от SV проиллюстрирована на Фиг.6 согласно конкретному примеру. Тем не менее, это лишь вариант осуществления системы, которая может получать такие сигналы согласно конкретному примеру, и другие системы могут использоваться без отклонения от заявленного предмета изобретения. Как проиллюстрировано, на Фиг.6 согласно конкретному варианту осуществления такая система может содержать вычислительную платформу, включая процессор 1302, память 1304 и коррелятор 1306. Коррелятор 1306 может быть приспособлен для создания функций корреляции от сигналов, предоставленных приемником (не показано), которые необходимо обработать с помощью процессора 1302, либо непосредственно или с помощью памяти 1304. Коррелятор 1306 может быть реализован в аппаратном обеспечении, программном обеспечении или сочетании аппаратного и программного обеспечения. Тем не менее, это только примеры того, как коррелятор может быть реализован согласно конкретным аспектам, и заявленный предмет изобретения не ограничен этими аспектами.
Согласно примеру память 1304 может хранить машиночитаемые команды, которые являются доступными и исполняемыми процессором 1302 для предоставления, по меньшей мере, участка вычислительной платформы. В конкретном примере, хотя заявленный предмет изобретения не ограничен в этих отношениях, процессор 1302 может направлять коррелятор 1306 для поиска сигналов определения положения, как проиллюстрировано выше, и извлекать измерения из функций корреляции, формируемых коррелятором 1306.
Варианты осуществления навигационного приемника, как описано в данном документе, могут быть включены в любое из нескольких устройств, такое как, например, мобильную станцию (MS), базовую станцию и/или навигационные системы. Такая MS может содержать любое из нескольких устройств, такое как, например, мобильный телефон, ноутбук, персональный цифровой помощник, персональное навигационное устройство и/или тому подобное. В данном документе Фиг.7 показывает конкретное осуществление MS, в которой радио приемопередатчик 1406 может приспосабливаться для модулирования (RF) РЧ-сигнала несущей с информацией основной полосы, например, речь или данные, на РЧ-носителе, и демодулировать модулированный РЧ-носитель для получения такой информации основной полосы. Антенна 1410 может приспосабливаться для передачи модулированной РЧ-несущей по каналу беспроводной линии связи и приема модулированного РЧ-носителя по каналу беспроводной связи.
Процессор 1408 основной полосы может приспосабливаться для предоставления информации основной полосы от CPU 1402 в приемопередатчик 1406 для передачи по каналу беспроводной связи. В данном документе CPU 1402 может получить такую информацию основной полосы от устройства ввода в интерфейсе 1416 пользователя. Процессор 1408 основной полосы может также приспосабливаться для предоставления информации основной полосы от приемопередатчика 1406 в CPU 1402 для передачи через устройство вывода в интерфейсе 1416 пользователя.
Интерфейс 1416 пользователя может содержать множество устройств для ввода или вывода пользовательской информации, например, речь или данные. Такие устройства могут включать в себя, например, клавиатуру, экран дисплея, микрофон и динамик.
SPS-приемник (SPS Rx) 1412 может приспосабливаться для приема и демодуляции передач от SUV с помощью антенны 1414 SPS и предоставлять демодулированную информацию в коррелятор 1418. Коррелятор 1418 может приспосабливаться для извлечения функций корреляции из информации, предоставленной приемником 1412. Для указанного PN-кода, например, коррелятор 1418 может создавать функцию корреляции, заданную по диапазону фаз кода, чтобы изложить окно поиска фазы кода и с помощью гипотез диапазона частот Доплера, как проиллюстрировано выше. Как таковая, индивидуальная корреляция может осуществляться согласно заданным когерентным и некогерентным параметрам интеграции.
Коррелятор 1418 может также приспосабливаться для извлечения функций корреляции, связанных с контрольным сигналом, относящихся к контрольным сигналам, предоставляемым приемопередатчиком 1406. Эта информация может использоваться абонентской станцией для получения служб беспроводной связи.
Канальный декодер 1420 может быть приспособлен для декодирования символов канала, принятых от процессора 1408 основной полосы, в лежащие в основе исходные биты. В одном примере, где символы канала содержат сверточно закодированные символы, такой канальный декодер может содержать декодер Витерби. Во втором примере, где символы канала содержат последовательное или параллельное соединение сверточных кодов, канальный декодер 1420 может содержать турбо-декодер.
Память 1404 может быть приспособлена для хранения машиночитаемых команд, которые выполняются для осуществления одного или более из процессов, примеров, вариантов осуществления или их примеров, которые были описаны или предложены. CPU 1402 может приспосабливаться для осуществления доступа и выполнения таких машиночитаемых команд. С помощью выполнения этих машиночитаемых команд CPU 1402 может направлять коррелятор 1418 для анализа функций корреляции SPS, предоставляемых коррелятором 1418, извлекать измерения из их пиков и определять, является ли оценка местоположения достаточно точной. Тем не менее, это лишь примеры задач, которые могут осуществляться CPU в конкретном аспекте, и заявленный предмет изобретения не ограничен в этом отношении.
В конкретном примере CPU 1402 в абонентской станции может оценивать местоположение абонентской станции на основе, по меньшей мере частично, сигналов, принятых от SV, как проиллюстрировано выше. CPU 1402 может также быть приспособлен для определения диапазона поиска кода для получения второго принятого сигнала на основе, по меньшей мере частично, фазы кода, обнаруженного в первых принятых сигналах, как проиллюстрировано выше согласно конкретным примерам. Следует понимать, тем не менее, что это лишь просто примеры систем для оценки местоположения на основе, по меньшей мере частично, измерений псевдодиапазона, определяя количественные оценки таких измерений псевдодиапазона и прерывая процесс для улучшения точности измерений псевдодиапазона согласно конкретным аспектам, и что заявленный предмет изобретения не ограничен в этих отношениях.
Хотя проиллюстрировано и описано, что в настоящее время рассмотрены как примерные признаки, специалистам в данной области техники будет понятно, что различные другие модификации могут быть выполнены и эквиваленты могут быть замещены без отклонения от заявленного предмета изобретения. Кроме того, многие модификации могут быть сделаны для приспособления конкретной ситуации к идеям заявленного предмета изобретения без отклонения от главного принципа, описанного в данном документе. Следовательно, подразумевается, что заявленный предмет изобретения не ограничен конкретными раскрытыми примерами, но что такой заявленный предмет может также включать в себя все аспекты, попадающие в объем прилагаемой формулы изобретения, и ее эквиваленты.





Изобретение относится к области радиотехники, а именно к обработке сигналов навигации, и может быть использовано в спутниковой системе позиционирования (SPS). Технический результат заключается в обеспечении возможности приема и обработки сигналов разных SPS в одном приемном тракте на разных частотах. Для этого принимают два или более сигналов спутниковой системы позиционирования (SPS) в приемнике на ассоциированных двух или более частотах несущей и преобразовывают с понижением частоты упомянутые два или более принятых SPS-сигналов в единственном тракте приемника согласно общей частоте гетеродина, 2 н. и 15 з.п. ф-лы, 7 ил.
1. Способ обработки сигналов спутниковой системы позиционирования (SPS), содержащий этапы, на которых
принимают в приемнике составной сигнал, включающий в себя первый сигнал спутниковой системы позиционирования (SPS) на первой частоте (f1) несущей и второй сигнал SPS на второй частоте (f2) несущей, отличающийся тем, что
обрабатывают составной сигнал, включающий в себя первый сигнал SPS и второй сигнал SPS, в одном тракте приемника, содержащем одну группу компонентов приемника, чтобы одновременно обрабатывать первый сигнал SPS и второй сигнал SPS в составном сигнале;
преобразовывают с понижением частоты составной сигнал, включающий в себя первый сигнал SPS и второй сигнал SPS, в одном каскаде комплексного понижающего преобразования, чтобы смешать составной сигнал, включающий в себя первый сигнал SPS и второй сигнал SPS, с частотой гетеродина, чтобы создать составные сигналы на одной промежуточной частоте; и
цифровым образом дискретизируют сигналы на одной промежуточной частоте.
2. Способ по п.1, в котором часть изображения первого сигнала SPS в составном преобразованном с понижением частоты сигнале в основном перекрывает изображение части второго сигнала SPS в составном преобразованном с понижением частоты сигнале.
3. Способ по п.1, в котором первый сигнал SPS передается от первой глобальной навигационной спутниковой системы (GNSS1) и второй сигнал SPS передается из второй глобальной навигационной спутниковой системы (GNSS2).
4. Способ по п.3, в котором первый сигнал SPS передается от Glonass GNSS, и при этом второй сигнал SPS передается из SPS, выбранной из группы, состоящей главным образом из GPS GNSS и Galileo GNSS.
5. Способ по п.3, в котором первый SPS сигнал передается от Compass GNSS и в котором второй SPS сигнал передается из GPS GNSS.
6. Способ по п.1, в котором преобразование с понижением частоты содержит смешивание составного сигнала с сигналом гетеродина, который имеет частоту гетеродина (FLO), причем частота гетеродина (FLO) выбирается посередине между первой частотой (f1) несущей и второй частотой несущей (f2).
7. Способ по п.1, в котором преобразование с понижением частоты содержит смешивание составного сигнала с гетеродином, чтобы предоставить синфазные (I) и квадратурные (Q) компоненты и в котором цифровая дискретизация содержит цифровую дискретизацию синфазных (I) и квадратурных (Q) компонентов, чтобы обеспечить дискретные синфазные (I) и квадратурные (Q) компоненты, причем способ дополнительно содержит этапы, на которых
применяют первое преобразование с понижением частоты второго этапа к дискретным синфазным и квадратурным компонентам для предоставления выходных выборок для обработки в основной полосе с учетом специфики первой глобальной навигационной спутниковой системы (GNSS1); и
применяют второе преобразование с понижением частоты второго этапа для дискретных синфазных и квадратурных компонентов для предоставления выходных выборок для обработки в основной полосе с учетом специфики второй глобальной навигационной спутниковой системы (GNSS2).
8. Способ по любому из предыдущих пунктов, в котором составной сигнал включает в себя третий сигнал SPS на третьей частоте (f3) несущей.
9. Способ по п.1, в котором два или более SPS-сигналов принимают с помощью одной антенны и одного полосового фильтра, приспособленных для приема SPS-сигналов в диапазоне, включающем в себя частоты несущих.
10. Способ по п.9, в котором полосовой фильтр содержит фильтр поверхностных акустических волн (SAW).
11. Способ по п.9, в котором первый и второй SPS-сигналы принимают с помощью одного малошумящего усилителя (LNA).
12. Устройство для обработки сигналов спутниковой системы позиционирования (SPS), которое содержит
средство для приема составного сигнала, включающего в себя первый сигнал спутниковой системы позиционирования (SPS) на первой частоте (f1) несущей и второй сигнал SPS на второй частоте (f2) несущей;
один тракт приемника, содержащий одну группу компонентов приемника, чтобы одновременно обрабатывать первый сигнал SPS и второй сигнал SPS в составном сигнале;
один каскад комплексного преобразования с понижением частоты для смешивания составного сигнала, включающего в себя первый сигнал SPS и второй сигнал SPS, с частотой гетеродина, чтобы создать составные сигналы на одной промежуточной частоте; и
средство для цифровой дискретизации сигналов на одной промежуточной частоте.
13. Устройство по п.12, в котором один каскад комплексного преобразования с понижением частоты содержит средство для смешивания составного сигнала, включающего в себя первый сигнал SPS и второй сигнал SPS, с сигналом гетеродина, который имеет частоту гетеродина (FLO), в котором частота гетеродина (FLO) выбирается посередине между первой частотой (f1) несущей и второй частотой несущей (f2).
14. Устройство по п.12, в котором устройство содержит мобильную станцию и дополнительно содержит процессор основной полосы для определения измерений псевдодиапазона, ассоциированных с принятыми SPS сигналами на основе, по меньшей мере частично, преобразованных с понижением частоты сигналов и информации помощи в получении.
15. Устройство по п.12, в котором преобразователь с понижением частоты смешивает составной сигнал с гетеродином, чтобы предоставить синфазные (I) и квадратурные (Q) компоненты и в котором цифровой дискретизатор выполнен с возможностью дискретизировать синфазные (I) и квадратурные (Q) компоненты, чтобы предоставить дискретные синфазные и квадратурные компоненты, причем устройство содержит второй преобразователь с понижением частоты, содержащий
четыре умножителя для смешивания синфазных (I) и квадратурных (Q) компонентов для обеспечения ассоциированных выходных сигналов четырех умножителей;
первую пару сумматоров для обеспечения первого сигнала основной полосы на основе, по меньшей мере частично, выходных сигналов четырех умножителей; и
вторую пару сумматоров для обеспечения второго сигнала основной полосы на основе, по меньшей мере частично, выходных сигналов четырех умножителей.
16. Устройство по п.12, в котором приемник содержит
малошумящий усилитель, адаптированный для одновременного приема составного сигнала, включающего в себя первый сигнал SPS и второй сигнал SPS; и
тракт общего комплексного сигнала для обработки одновременно принятых SPS сигналов, причем тракт комплексного сигнала содержит
смеситель, адаптированный для генерирования трактов синфазных (I) и квадратурных (Q) сигналов на основе, по меньшей мере частично, принятого составного сигнала, включающего в себя первый сигнал SPS и второй сигнал SPS; и
одну или более схем аналого-цифрового преобразования, адаптированных для обеспечения дискретизированных синфазных и квадратурных компонентов на основе, по меньшей мере частично, сигналов, обработанных в трактах синфазного и квадратурного сигнала.
17. Устройство по п.12, в котором устройство содержит автомобильную навигационную систему.
| A.Schmid, A.Neubauer и др | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| "Enabling Location Based Services with a Combined Galileo/GPS Receiver Architecture", 24.09.2004 | |||
| US 6888879 B1, 03.05.2005 | |||
| СПОСОБ ОБРАБОТКИ И ОЦЕНКИ СИГНАЛА В СИСТЕМЕ ПОЗИЦИОНИРОВАНИЯ | 2004 |
|
RU2291561C2 |
| Схема для исправления сигналов в синхронных телеграфных аппаратах | 1949 |
|
SU83480A1 |
| US 2006176215 A1, 10.08.2006. | |||

