Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для оптического измерения расстояний (оптическому дальномеру) согласно ограничительной части независимого пункта формулы изобретения.
Уровень техники
Оптические устройства для измерения расстояния как таковые известны уже давно и в последнее время в большом количестве поступают в продажу. Эти устройства посылают модулированный световой луч, направленный на поверхность нужного целевого объекта, расстояние которого от устройства необходимо определить. Возвращающийся от целевого объекта свет, отраженный или рассеянный целевым объектом, частично обнаруживается устройством и используется для определения искомого расстояния.
Область применения подобных устройств для измерения расстояния обычно находится в пределах от нескольких сантиметров до нескольких сотен метров.
В зависимости от измеряемых путей прохождения луча и отражательной способности целевого объекта к источнику света, качеству измерительного луча и детектору предъявляются различные требования.
Известные из уровня техники оптические устройства для измерения расстояния можно в принципе подразделить на две категории в соответствии с расположением необходимых в устройстве каналов передачи и приема.
Во-первых, существуют устройства, в которых канал передачи расположен на определенном расстоянии от канала приема, поэтому соответствующие оптические оси проходят параллельно друг другу, но разделены пространством. Во-вторых, имеются одноосные измерительные устройства, в которых канал приема расположен соосно каналу передачи.
Первые из названных двуосные измерительные системы имеют то преимущество, что в них не требуется сложное разделения излучения для выбора возвращающегося измерительного сигнала, что позволяет лучше подавлять непосредственные перекрестные оптические помехи от канала передачи в канале приема.
С другой стороны, двуосные устройства для измерения расстояния имеют тот недостаток, что в области коротких измеряемых расстояний вследствие параллакса могут возникать проблемы обнаружения излучения. При этом изображение целевого объекта на рабочей поверхности детектора устройства, которое при больших расстояниях до цели еще отчетливо находится на детекторе, по мере уменьшения измеряемого расстояния все больше смещается от оптической оси приемного канала при одновременном значительном изменении поперечного сечения луча в плоскости детектора.
Вследствие этого, если не внести каких-либо конструктивных изменений в устройство, измерительный сигнал в ближней зоне обнаружения, т.е. для малого расстояния между целевым объектом и измерительным устройством, может снизиться до нуля.
Хотя такие измерительные устройства можно оптимизировать для определенного диапазона расстояний, однако это будет означать значительное ограничение доступного для измерительного устройства диапазона измерений.
Из публикации DE 10130763 А1 известно устройство для оптического измерения расстояний в широком диапазоне измерений, имеющее передатчик с источником света для посылки модулированного оптического излучения на целевой объект, причем расположенный в этом измерительном устройстве приемник с оптическим детектором для приема отраженного от целевого объекта оптического излучения находится на оси приема, проходящей на расстоянии от оптической оси передатчика. Активная светочувствительная поверхность детектора приемника, описанного в публикации DE 10130763 А1,сужается в направлении смещения луча при уменьшении расстояний до целевого объекта, обусловленного параллаксом отраженного измерительного луча.
Из публикации DE 10051302 А1 известно лазерное устройство для измерения малых и больших расстояний со специальным приемником, имеющим канал передачи и канал приема, причем канал передачи включает в себя передающий объектив, в фокусе которого расположен источник света, а канал приема - принимающий объектив, в фокальной плоскости которого находится приемник. Оптические оси передающего и приемного объективов проходят параллельно друг другу на конечном расстоянии. Приемник лазерного устройства для измерения расстояния, описанного в публикации DE 10051302 А1, - это фотодиодная микросхема по меньшей мере с двумя активными фотодиодными поверхностями, расположенными на одной прямой, пересекающей оптические оси передающего и приемного объективов этого устройства.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы, исходя из уровня техники, обеспечить в устройстве для оптического измерения расстояний как можно в большем диапазоне измерений как можно более постоянный принимаемый сигнал.
Эта задача решается предлагаемым в изобретении устройством для оптического измерения расстояний с признаками, охарактеризованными в независимом пункте формулы изобретения.
В двуосных оптических системах для измерения расстояния, в большинстве случаев настроенных на большие измеряемые расстояния, при малых измеряемых расстояниях наряду с боковым отклонением отраженного измерительного сигнала в плоскости детектора происходит также расфокусировка измерительного светового пучка. Она ведет к увеличению диаметра луча измерительного сигнала в плоскости обнаружения. Следствием этого является уменьшение силы измерительного сигнала на единицу площади, которое - в зависимости от конструктивного исполнения измерительного устройства - лишь частично компенсируется увеличением силы сигнала, обусловленным коротким расстоянием.
Предлагаемое в изобретении устройство для оптического измерения расстояний имеет передатчик с источником света для посылки оптического излучения, прежде всего модулированного оптического измерительного излучения, и приемник, расположенный на расстоянии от оптической оси этого передатчика и содержащий по меньшей мере один оптический детектор. При этом форму светочувствительной активной поверхности предлагаемого в изобретении директора предпочтительно выбирают таким образом, чтобы и в ближней зоне получить на поверхности детектора сигнал достаточной силы.
Для этого детектор приемника, или светочувствительная поверхность детектора, имеет оптический элемент ближней зоны для обнаружения измеряемого излучения, в частности приходящего из ближней зоны, оптически активная поверхность которого по меньшей мере частично расширяется, увеличиваясь перпендикулярно направлению смещения луча при уменьшении расстояний до целевого объекта, либо по меньшей мере имеет по существу постоянную протяженность.
Кроме того, оптически активная поверхность детектора вытянута в направлении смещения луча при уменьшении расстояний до целевого объекта, т.е. эффективная светочувствительная поверхность имеет в направлении смещения луча большую протяженность, чем в перпендикулярной к нему ориентации. Благодаря этому даже при "отклонении" измерительного сигнала вследствие присущего системе параллакса на активную поверхность детектора всегда поступает измерительный сигнал достаточной силы, чем достигается хорошее отношение "сигнал-шум" при измерении с помощью предлагаемого в изобретении устройства.
В отличие от известных из уровня техники устройств для оптического измерения расстояний предлагаемое в изобретении устройство имеет, в частности, то преимущество, что пройденный оптическим излучением путь не зависит от средств устранения проблем параллакса, поэтому они не оказывают отрицательного влияния на измерение расстояния.
В преимущественном варианте исполнения детектор приемника устройства имеет элемент ближней зоны, оптически активная поверхность которого расширяется в направлении смещения луча при уменьшении расстояний до целевого объекта. Это создает возможность компенсации эффекта расфокусировки, устанавливающегося для малых расстояний до целевого объекта. Эта расфокусировка, ведущая к увеличению диаметра луча измерительного сигнала в плоскости обнаружения, обычно означает уменьшение силы измерительного сигнала на единицу площади и, следовательно, уменьшение поддающегося обнаружению принимаемого сигнала.
Поскольку в предлагаемом в изобретении устройстве светочувствительная поверхность детектора увеличивается в направлении смещения луча при уменьшении расстояний до целевого объекта и, в частности, расширяется, в направлении, проходящем поперек направления смещения луча, то с увеличением смещения луча и сопровождающей его расфокусировкой эффективная поверхность детектора, при которой производится измерение, увеличивается, что позволяет по меньшей мере практически компенсировать эффект уменьшения поверхностной плотности для измерительного сигнала, обычно обусловленный малыми расстояниями до целевого объекта.
В альтернативных вариантах исполнения может оказаться достаточным, чтобы оптически активная поверхность имела в направлении смещения луча при уменьшении расстояний до целевого объекта по существу постоянную протяженность. Поскольку только по "закону квадратов расстояния" сила измерительного сигала при уменьшении расстояний до целевого объекта значительно увеличивается, этот эффект в зависимости от конструктивного исполнения устройства для измерения расстояния, т.е., в частности, также в зависимости от фокусного расстояния используемой в детекторе коллиматорной оптической системы, может уже быть достаточным, чтобы компенсировать уменьшение интенсивности измерительного сигнала вследствие расфокусировки. В таком случае было бы достаточно, если бы оптически активная поверхность детектора в направлении смещения луча при уменьшении расстояний до целевого объекта имела по существу постоянную протяженность.
Благодаря предлагаемой в изобретении форме светочувствительной поверхности по меньшей мере одного своего детектора и, в частности благодаря предлагаемому в изобретении формообразованию элемента ближней зоны для такого детектора, описанное в заявке устройство для оптического измерения расстояний предпочтительным образом обеспечивает возможность измерения в большом диапазоне принимаемого сигнала достаточной силы, в частности как можно более постоянного измерительного сигнала.
Это позволяет просто и надежно расширять доступный диапазон измерений для такого измерительного устройства.
Предпочтительные и усовершенствованные варианты исполнения предлагаемого в изобретении устройства определяются признаками, приведенными в зависимых пунктах формулы изобретения.
Светочувствительная поверхность детектора предпочтительно имеет ось симметрии, расположенную в общей плоскости оптических осей передатчика и приемника устройства. Вследствие того, что возвращающийся от целевого объекта измерительный луч при уменьшающемся расстоянию до объекта уходит в сторону в общей плоскости оптических осей передатчика и приемника, детектор будет иметь предпочтительно удлиненную в этом направлении форму. Таким образом учитывается зависимость направления отраженного измерительного сигнала от расстояния между измерительным устройством и целевым объектом. При этом величину светочувствительной поверхности детектора приемника предпочтительно выбирают таким образом, чтобы на соответствующую часть поверхности детектора, в частности также в ближней зоне, поступал сигнал достаточной силы.
Кроме того, это позволяет учитывать также зависимость интенсивности возвращающегося измерительного сигнала от расстояния между измерительным устройством и целевым объектом.
Что касается размеров поверхности детектора или размеров светочувствительных поверхностей детектора, то следует лишь обеспечить, чтобы эффективная поверхность, т.е. оптически активная поверхность детектора, на которую падает свет от целевых объектов, расположенных на большом удалении, была достаточно большой, чтобы в этом случае обнаруживать сигнал в как можно более полном объеме, так как далеко отстоящие объекты измерения дают сравнительно слабый обнаруживаемый сигнал. Это также является следствием действия закона квадратов расстояния, которому подчиняется регистрируемая интенсивность.
Поперечная протяженность оптически активной поверхности детектора должна быть соответственно настолько большой, чтобы на активную рабочую поверхность детектора попадало достаточно света из зоны, находящейся в непосредственной близости.
Другим преимуществом описанного в заявке устройства является то, что предлагаемая в изобретении форма оптически активной рабочей поверхности положительно влияет на электрические емкостные свойства детектора измерительного устройства. Слишком большая активная поверхность детектора повысила бы электрическую емкость детектора, вследствие чего временная характеристика срабатывания или, что то же самое, частотная характеристика измерительной системы перестала бы соответствовать требованиям временного и частотного разрешения измерительной системы.
Простое и экономичное исполнение предлагаемого в изобретении устройства с описанной в заявке рабочей поверхностью детектора реализуется, если оптически эффективная, т.е. светочувствительная рабочая поверхность образуется частичным перекрытием первоначально большей поверхности детектора. Для этого детектор большой площади может, например, содержать светонепроницаемый слой, в частности лаковое или неактивное покрытие в тех зонах, которые не нужно использовать для обнаружения излучения, поэтому в качестве эффективной, активной поверхности детектора можно использовать только описанную в заявке форму. Светонепроницаемые зоны в зависимости от используемой длины волны измерительного сигнала и соответствующим образом выбранного детектора можно создавать, например, путем напыления или нанесения лакового покрытия на поверхность детектора. С помощью простой механической маски или бленды можно было бы также просто реализовать предлагаемую в изобретении форму активной поверхности детектора.
Предлагаемое в изобретении устройство для оптического измерения расстояний можно предпочтительно реализовать путем использования лазера, в частности лазерного диода, в качестве источника света. В настоящее время экономичные лазеры и, в частности лазерные диоды, можно получить для всей видимой области спектра электромагнитных волн. В частности, лазерные диоды благодаря своей компактности и сравнительно высокой выходной мощности пригодны для использования в устройствах для оптического измерения расстояний, особенно в портативных устройствах.
Таким образом, предлагаемое в изобретении устройство для оптического измерения расстояний позволяет достичь максимального постоянства принимаемого или обнаруживаемого сигнала в широком диапазоне измерений расстояния между устройством и целевым объектом.
Краткое описание чертежей
Другие преимущества изобретения рассмотрены в приведенном ниже описании нескольких примеров исполнения рабочей поверхности детектора, поясняемом прилагаемыми чертежами. На чертежах, в описании и формуле изобретения раскрыта комбинация множества признаков. Для специалиста будет очевидна возможность реализации этих признаков, в том числе признаков разных вариантов осуществления изобретения, по отдельности и в других целесообразных комбинациях. На чертежах показано:
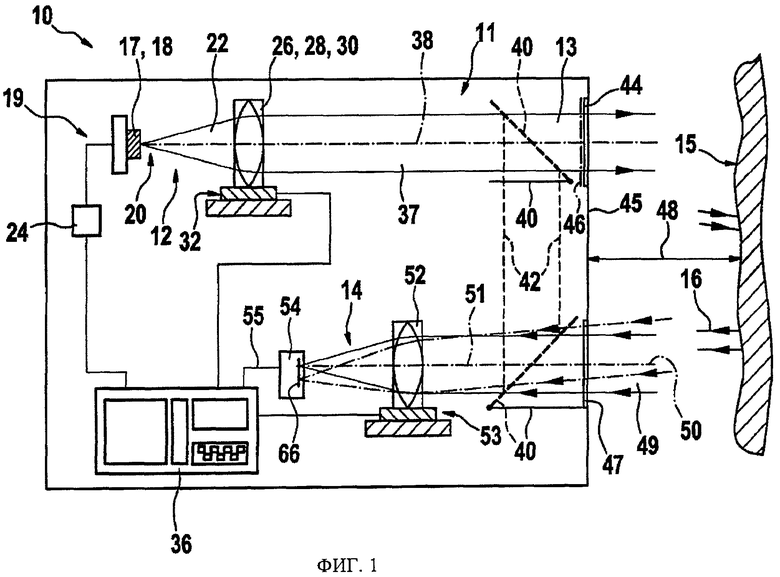
на фиг.1 - схематизированный вид примера исполнения предлагаемого в изобретении устройства для оптического измерения расстояний,
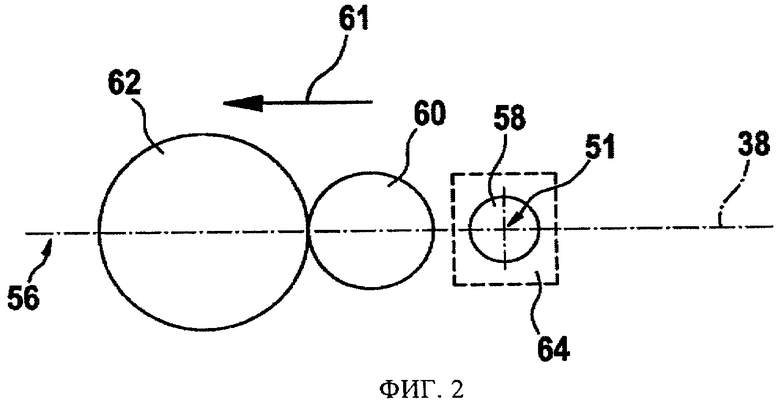
на фиг.2 - схема изменения измерительного светового пучка в плоскости обнаружения при изменении расстояния до объекта измерения,
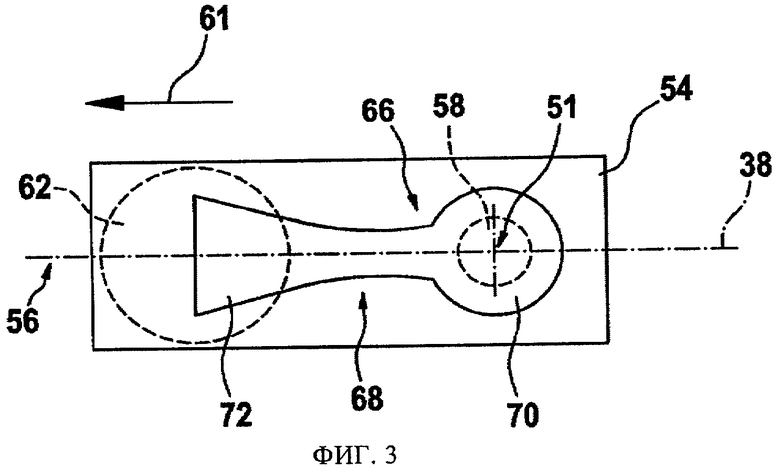
на фиг.3 - вид сверху на поверхность детектора предлагаемого в изобретении устройства,
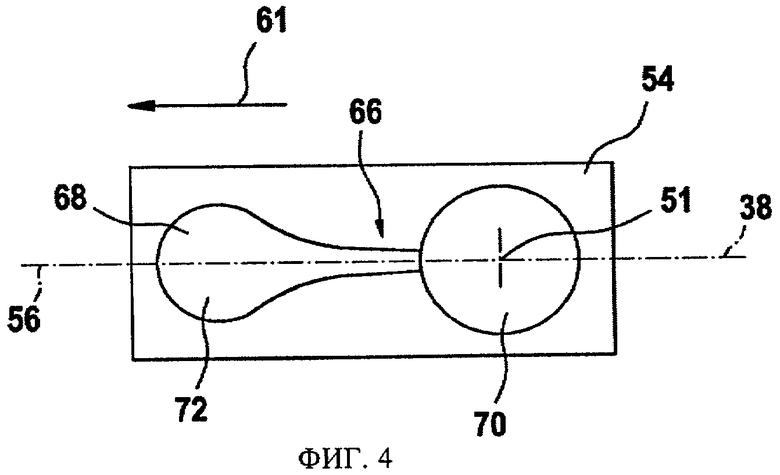
на фиг.4 - вид сверху на альтернативный вариант исполнения детектора для предлагаемого в изобретении устройства,
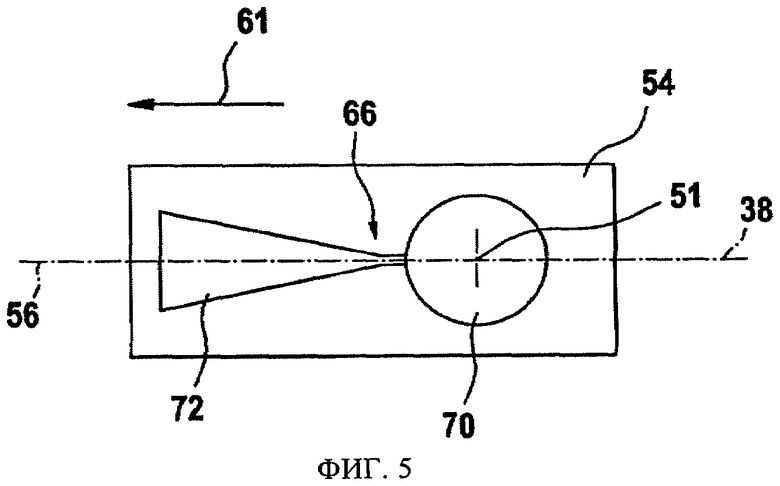
на фиг.5 - схема другого варианта исполнения светочувствительной поверхности детектора предлагаемого устройства,
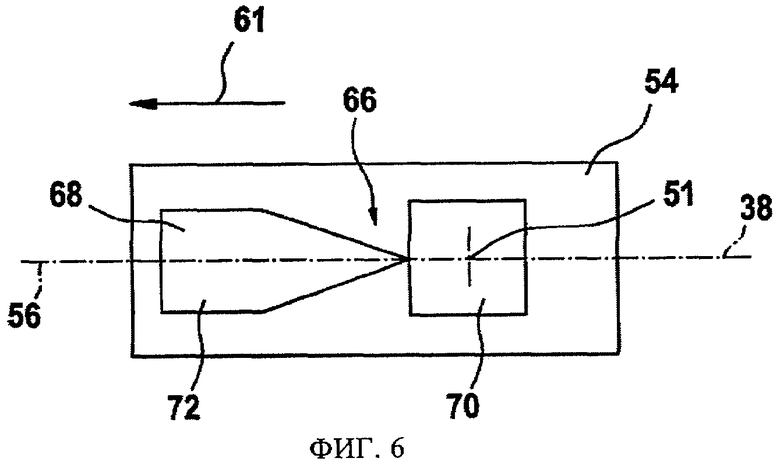
на фиг.6 - схема еще одного варианта исполнения светочувствительной поверхности детектора предлагаемого устройства,
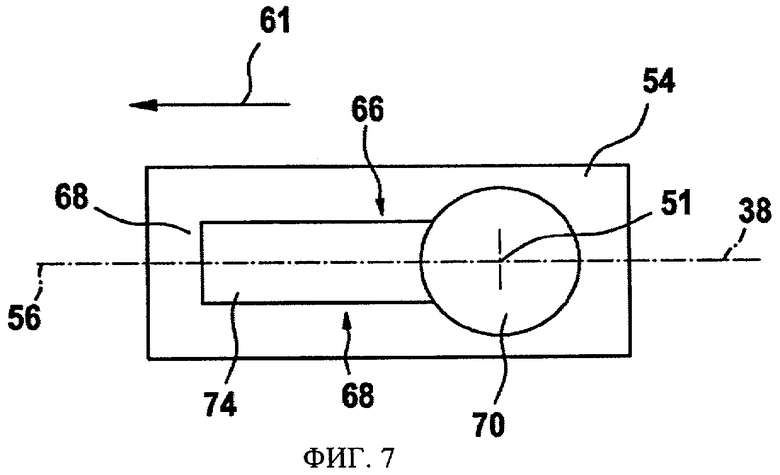
на фиг.7 - схема еще одного варианта исполнения светочувствительной поверхности детектора предлагаемого устройства,
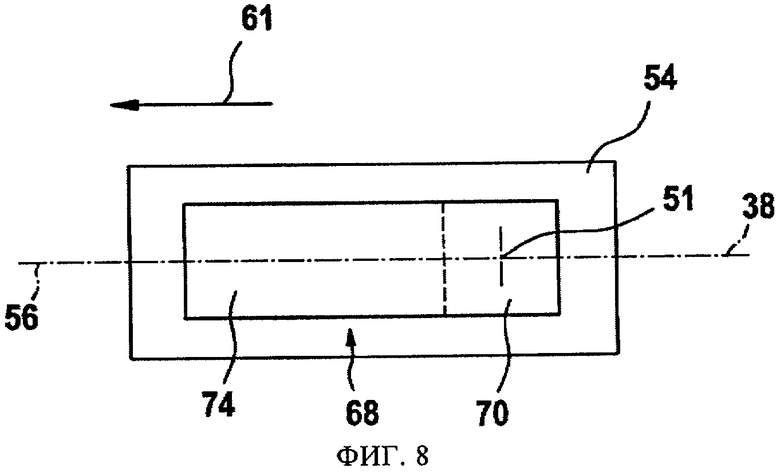
на фиг.8 - схема еще одного варианта исполнения светочувствительной поверхности детектора предлагаемого устройства,
на фиг.9 - упрощенная схема поверхности детектора для пояснения образования светочувствительной поверхности детектора.
Осуществление изобретения
На фиг.1 в схематизированном виде показано предлагаемое в изобретении устройство для оптического измерения расстояний с важнейшими компонентами и пояснением их функций. Устройство 10 имеет корпус 11, в котором размещены передатчик 12 для генерирования измерительного сигнала 13, а также приемник 14 для обнаружения возвращающегося от целевого объекта измерительного сигнала 16.
Передатчик 12 включает в себя источник 17 света, который в примере исполнения, показанном на фиг.1, реализован полупроводниковым лазерным диодом 18. Однако в устройстве возможно использование и других источников света. Лазерный диод 18 посылает лазерный луч 20 в форме видимого для человеческого глаза светового пучка 22.
Лазерный диод 18 сопряжен с блоком управления 24, который соответствующими электронными средствами вызывает модуляцию электрического входного сигнала 19 диода 18. Такой модуляцией проходящего через диод тока можно достичь того, что оптический измерительный сигнал 13, используемый для измерения расстояния, также модулируется нужным образом.
После этого лазерный пучок 20 проходит через коллиматорную оптическую систему 26, представляющую собой объектив 28, упрощенно представленный на фиг.1 в виде отдельной линзы 30. Объектив 28 в этом примере исполнения в качестве варианта расположен на регуляторе 32 положения, который в принципе позволяет изменять положение объектива во всех трех измерениях, например, для целей юстировки.
Вместе с тем, в альтернативном варианте коллиматорная оптическая система может быть составной частью уже самого лазерного диода 18 или быть жестко связана с ним.
После прохождения объектива 28 генерируется, например, амплитудно-модулированный сигнал 13 в виде параллельного светового пучка 37, распространяющегося вдоль оптической оси 38 передатчика 12, как это схематически показано на фиг.1. Кроме того, в передатчике 12 предлагаемого в изобретении устройства имеется предпочтительно переключаемое приспособление 40 для отклонения пучка, которое позволяет направлять измерительный сигнал 13 в обход целевого объекта непосредственно, т.е. внутри устройства в приемник 14 устройства 10. Таким путем в устройстве создается внутренний опорный участок 42, позволяющий выполнять градуировку или настройку измерительной системы.
Если с помощью устройства выполняется измерение расстояния, измерительный луч 13 выходит из корпуса 11 устройства через оптическое окно в торцовой стенке 45 устройства 10. Проем оптического окна может быть защищен, например, затвором 46. После этого для собственно измерения измерительное устройство направляют на целевой объект 15, расстояние 48 которого от измерительного устройства необходимо измерить. Отраженный от целевого объекта 15 или рассеянный сигнал 16 образует возвращающийся пучок 49 или 50, определенная часть которого снова попадает в измерительное устройство 10.
Через входное окно 47 в торцовой стенке 45 устройства 10 отраженный измерительный луч 16 снова вводится в измерительное устройство и в примере, показанном на фиг.1, отклоняется приемной оптической системой 52.
На фиг.1 в качестве примера показаны два возвращающихся измерительных пучка 49 и 50 для двух различных расстояний 48 до целевого объекта. Для больших расстояний до объекта, т.е. расстояний, превышающих фокусное расстояние приемной оптической системы 52, возвращающийся от целевого объекта сигнал 16 поступает параллельно оптической оси 51 приемника 14. Этот случай представлен на фиг.1 измерительным пучком 49. По мере уменьшения расстояния до объекта поступающий в измерительное устройство возвращающийся сигнал 16 в результате параллакса все больше отклоняется от оси 51 приемника 14. В качестве примера такого отраженного измерительного пучка в ближней зоне устройства для измерения расстояния показан пучок 50.
Приемная оптическая система 52, которая в примере исполнения согласно фиг.1 также показана лишь символически в виде отдельной линзы, коллимирует возвращающийся измерительный сигнал 16 и фокусирует его пучок на светочувствительную поверхность 66 приемного детектора 54. Детектор 54 для обнаружения оптического измерительного излучения имеет по меньшей мере один фотодиод, например PIN-диод или APD (лавинный фотодиод) или же по меньшей мере микросхему с постоянной зарядовой связью в качестве светочувствительного элемента 66. Кроме того, в качестве приемных детекторов, естественно, возможны и другие, известные специалисту, плоские детекторы. Плоский детектор, как правило, ориентирован своими активными светочувствительными поверхностями 66 перпендикулярно к оптической оси приемника. Поступающий оптический сигнал преобразуется приемным детектором 54 в электрический сигнал 55 и для дальнейшей обработки направляется в блок 36 обработки сигналов предлагаемого в изобретении устройства. Точная структура светочувствительной поверхности 66 детектора более подробно поясняется схемами на фиг.3-9.
Приемная оптическая система 52, которая в примере исполнения, показанном на фиг.1, которая может, но не обязательно должна располагаться на регуляторе 53 положения, находится приблизительно на фокусном расстоянии от активной поверхности 66 детектора, поэтому излучение, поступающее от целевого объекта, расположенного на большом удалении от измерительного устройства, фокусируется по существу на детектор, или его светочувствительную поверхность.
Однако при малых расстояниях до целевого объекта можно наблюдать, что положение изображения для отраженного от целевого объекта или рассеянного им измерительного пятна все больше удаляется от фокуса приемной линзы. Так, по мере уменьшения расстояния между целевым объектом и измерительным устройством возвращающийся измерительный луч все больше отклоняется от оптической оси приемника и, следовательно, также от оптической оси передатчика. Кроме того, вследствие изменяющихся условий изображения возвращающийся измерительный пучок уже не точно фокусируется на поверхность детектора. По мере уменьшения расстояния до целевого объекта измерительное пятно на поверхности детектора становится все больше.
На других имеющихся в измерительном устройстве компонентах, которые не обязательны для понимания сущности предлагаемого в изобретении устройства в этой связи нет необходимости останавливаться подробнее. Следует лишь заметить, что измерительное устройство, естественно, оснащено блоком управления и блоком 36 обработки сигналов.
Зависимости между расстоянием от целевого объекта до измерительного устройства, а также положением и размером измерительного пятна в плоскости обнаружения и, следовательно, также на поверхности детектора схематически представлены на фиг.2. При этом на фиг.2 показан вид сверху рабочей поверхности 64 детектора, известного из уровня техники, при взгляде в направлении возвращающегося от объекта измерения измерительного сигнала 16. Цифрой 56 обозначена общая плоскость оптической оси 38 передатчика 12 и оптической оси 51 приемника 14. Измерительное пятно 58 возвращающегося излучения 16 для очень больших расстояний до объекта центрировано на оптической оси 51 приемника 14 и фокусируется на поверхности 64 детектора в небольшое пятно. Поскольку детектор 54 находится приблизительно на фокусном расстоянии приемной оптической системы 52, свет, который в оптическом смысле приходит из бесконечности, по законам оптического изображения фокусируется непосредственно на поверхности детектора. На фиг.2 для пояснения зависимостей штриховыми линиями показана "классическая" поверхность 64 детектора, известного из уровня техники.
С уменьшением расстояния 48 между измерительным устройством 10 и целевым объектом 15 возвращающийся сигнал 16 все более наклонно падает на приемный объектив 52, поэтому измерительное пятно на поверхности детектора также смещается в направлении стрелки 61 на фиг.2. Показанное на фиг.2 измерительное пятно 60 для малого расстояния 48 между целевым объектом 15 и измерительным устройством 10 уже сместилось от оптической оси 51 приемника и значительно увеличилось по своей протяженности, в частности поперечной протяженности.
При очень малом расстоянии 48 между целевым объектом 15 и измерительным устройством в плоскости детектора возникает измерительное пятно 62 возвращающегося измерительного сигнала 16, которое еще более увеличено и, кроме того, находится дальше от оптической оси 51 приемника 14. Такое смещение регистрируемого измерительного пятна в зависимости от расстояния 48 между объектом измерения 15 и измерительным устройством 10 может в устройствах, известных из уровня техники, вести к тому, что для очень малых расстояний до объекта возвращающийся сигнал 16 уже не будет попадать на активную поверхность 64 измерительного приемника 54. Это имеет место в ситуации, показанной на фиг.2, например, для измерительных сигналов, которые генерируют в плоскости обнаружения измерительное пятно 60 или 62, так как в этом случае возвращающийся измерительный сигнал уже не попадает на активную рабочую поверхность, как это должно было бы быть для показанной штриховыми линиями на фиг.2 поверхности 64 "классического" измерительного приемника.
Чтобы учесть изменение размера и положения измерительного пятна в плоскости обнаружения приемника 14, активная светочувствительная поверхность 66 предлагаемого в изобретении детектора 54 имеет соответствующую форму и будет ниже описана для ряда примеров исполнения, который не следует рассматривать как исчерпывающий.
На фиг.3 показан первый пример исполнения светочувствительной поверхности 66 детектора предлагаемого в изобретении устройства. Детектор 54 приемника 14, который на фиг.3 и поясняемых ниже фиг.4-9 представлен лишь условно в виде рамки, имеет в этом случае первую зону 70, светочувствительная поверхность которой служит преимущественно для обнаружения измерительных сигналов, возвращающихся от далеко расположенного объекта измерения 24. Эта первая светочувствительная зона 70 выполнена таким образом, чтобы свет расположенного на большом удалении целевого объекта, попадающий в измерительное устройство и отображаемый на плоскость обнаружения, как можно более полно попадал на детектор или на светочувствительную поверхность 66 детектора 54. Для пояснения этого на фиг.3 еще раз показано измерительное пятно 58 измерительного пучка 49 для больших расстояний до объекта. Поэтому активная поверхность 70 предпочтительно имеет такую поперечную протяженность в плоскости обнаружения, которая обеспечивает как можно более полное обнаружение измерительного пятна 58 возвращающегося от расположенного на большом удалении целевого объекта измерительного излучения 16 или 49. Под поперечным направлением при этом понимается направление в плоскости обнаружения, перпендикулярное к направлению измерительного сигнала. Поэтому размер светочувствительной зоны 70 должен быть по существу равным или несколько больше размеров измерительного пятна 58 для очень больших расстояний до объекта, как показано на фиг.3. При этом светочувствительная зона 70 может иметь круглую форму, как на фиг.3, или прямоугольную или любую другую форму. Однако необходимо обеспечить, чтобы на светочувствительную поверхность 70 попадало как можно больше света от целевого объекта, расположенного на большом удалении.
Наряду с этим детектор 54 в варианте исполнения, показанном на фиг.3, имеет вторую светочувствительную зону 72, которая образует так называемый элемент 68 ближней зоны рабочей поверхности 66 детектора и служит, в частности, для приема и обнаружения измерительных сигналов при уменьшении расстояний до целевого объекта. Вторая зона 72 светочувствительной поверхности расширяется вблизи точек падения измерительных пучков, возвращающихся от близко расположенного целевого объекта, поэтому элемент ближней зоны имеет здесь большую светочувствительную поверхность. Благодаря тому, что светочувствительная поверхность детектора увеличивается в направлении, перпендикулярном смещению луча при уменьшении расстояний до целевого объекта, и эта поверхность расширяется, прежде всего, в направлении, проходящем поперек направления смещения луча, можно учитывать эффект расфокусировки возвращающегося измерительного пучка в плоскости обнаружения. Эффективная поверхность детектора, с помощью которой выполняется измерение, для меньших расстояний до целевого объекта увеличивается, что позволяет по меньшей мере значительно компенсировать эффект уменьшения поверхностной плотности для измерительного сигнала, который обычно генерируется при малых расстояниях до целевого объекта.
Вторая зона 72, или образованный этой зоной элемент 68 ближней зоны, имеют форму, вытянутую в направлении 61 смещения луча, т.е. протяженность светочувствительной поверхности 72 в этом направлении 61 больше, чем в перпендикулярном ему направлении.
Отдельные светочувствительные зоны 70 и 72 детектора 54 вместе образуют светочувствительную или оптически активную поверхность 66 детектора и, как показано в примере на фиг.3, могут быть выполнены как отдельная связная светочувствительная поверхность. Альтернативно можно также образовывать зоны 70 и 72 светочувствительной поверхности 66 детектора 54 раздельно друг от друга и обеспечивать их также раздельное электрическое управление, причем отдельные зоны в этом случае граничат друг с другом, чтобы светочувствительная поверхность была непрерывной в направлении смещения луча при уменьшении расстояний до целевого объекта.
Как уже упоминалось, в двуосных системах, которые, как правило, градуированы на большие измеряемые расстояния, при меньших измеряемых расстояниях наряду с боковым смещением измерительного сигнала в плоскости обнаружения происходит также расфокусировка. Она ведет к увеличению диаметра луча измерительного сигнала в плоскости обнаружения, как показано на фиг.2. Это сопровождается уменьшением силы измерительного сигнала на единицу площади, которая - в зависимости от конструктивного исполнения измерительного устройства - лишь частично компенсируется увеличением силы измерительного сигнала, обусловленным меньшим расстоянием до целевого объекта.
Уменьшение поверхностной плотности энергии или интенсивности измерительного сигнала на детекторе ухудшает отношение "сигнал-шум" и тем самым в конечном счете ограничивает область применения такой измерительной системы. Это обстоятельство учитывается предлагаемой в изобретении структурой светочувствительной поверхности 66 детектора и, в частности, предлагаемой формой элемента 68 ближней зоны согласно фиг.3.
При очень больших расстояниях 48 между целевым объектом 15 и измерительным устройством 10 измерительное пятно 58 - как уже пояснялось - полностью располагается на отдельной светочувствительной поверхности 70. Если при уменьшении расстояния 48 до объекта измерительное пятно смещается в направлении стрелки 61 от первоначальной приемной оси 51, то, как показано на фиг.2, диаметр, или поперечная протяженность, измерительного пятна увеличиваются.
При малом измеряемом расстоянии 48 объекта измерения 15 от измерительного устройства 10, при котором измерительное пятно еще дальше сместится в плоскости обнаружения в направлении стрелки 61 на фиг.3, соответственно увеличивается также светочувствительная поверхность 72 элемента 68 ближней зоны, что позволяет детектировать и анализировать большую долю сигнала также увеличивающегося измерительного пятна 62. Таким путем можно значительно улучшить отношение "сигнал-шум" даже для малых расстояний до объекта и тем самым расширить диапазон расстояний, доступный для измерительного устройства.
На фиг.4-6 представлены альтернативные варианты структуры светочувствительной поверхности 66 детектора 54 предлагаемого в изобретении устройства для измерения расстояния. Для простоты измерительные пятна 58 или 62 на этом изображении не представлены.
Общим для всех трех вариантов исполнения, показанных на фиг.4-6, является то, что элемент 68 ближней зоны имеет светочувствительную, или оптически активную, поверхность 72, которая по меньшей мере частично расширяется в направлении, перпендикулярном направлению 61 смещения луча при уменьшении расстояний 48 до целевого объекта. Это расширение может быть, например, линейным, как показано на фиг.5, или же непропорциональным, как на фиг.4. Под элементом ближней зоны со светочувствительной поверхностью 72, показанной на фиг.6, где светочувствительная поверхность 72 сначала расширяется, чтобы в дальнейшем сохранять постоянную поперечную протяженность в направлении 61 смещения луча при уменьшении расстояний до целевого объекта, в смысле настоящего изобретения будем понимать по меньшей мере частично расширяющуюся светочувствительную поверхность.
Поскольку поверхность детектора может иметь, разумеется, только конечную величину и поэтому должна быть замкнутой, для элемента 68 ближней зоны согласно варианту исполнения, показанному на фиг.4, образуется, например, зона, в которой поверхность 72 больше не расширяется, а даже снова сужается, чтобы обеспечить ограничение поверхности детектора. Эта краевая зона - слева на фиг.4 - светочувствительной поверхности 72 служит исключительно для необходимого ограничения светочувствительной поверхности элемента ближней зоны и не противоречит принципиальному расширению поверхности согласно идее изобретения. Эта физическая необходимость ограничения поверхности детектора учитывается тем, что в рамках предмета изобретения речь идет о том, что рабочая поверхность оптического элемента 68 ближней зоны вытянута в направлении 61 смещения луча при уменьшении расстояний 48 до целевого объекта и по меньшей мере частично расширяется в перпендикулярном ему направлении или имеет по существу постоянную протяженность. Общее впечатление, что светочувствительная поверхность оптического элемента 68 ближней зоны как целого имеет соответствующее расширение в направлении, перпендикулярном направлению 61 смещения луча, не затрагивается необходимым ограничением светочувствительной поверхности. То же относится в аналогичном смысле и к тем или иным модуляциям в ограничительных линиях светочувствительных поверхностей.
Требуется - в зависимости от конструктивного исполнения измерительного устройства, - с одной стороны, сопоставить эффект закона квадратов расстояния, с другой стороны, - эффект более или менее плохой фокусировки и найти оптимальную форму общей светочувствительной поверхности 66 и, в частности, оптимальную форму светочувствительных поверхностей 72 элемента ближней зоны. Так, в зависимости от конкретного конструктивного исполнения измерительного устройства может оказаться целесообразной та или иная специальная форма элемента 68 ближней зоны.
На фиг.7 и 8 показаны другие примеры исполнения предлагаемых в изобретении светочувствительных поверхностей 66 детектора 54. В направлении 61 смещения луча при уменьшении расстояний 48 до целевого объекта плоский детектор и здесь имеет в целом вытянутую, или удлиненную, форму. Это означает, что в направлении смещения измерительного сигнала протяженность детектора больше, в частности значительно больше, чем в перпендикулярном ему, т.е. поперечном направлении.
Детектор 54 в этом случае также имеет первую зону, светочувствительная поверхность 70 которой служит, прежде всего, для обнаружения измерительных сигналов, возвращающихся от расположенного на большом удалении объекта измерения. Эта первая светочувствительная зона 70 выполнена таким образом, чтобы свет от расположенного на большом удалении объекта, возвращающийся в измерительное устройство с отображением на плоскость обнаружения, как можно более полно попадал на детектор или на светочувствительную поверхность 66 детектора 54. Светочувствительная зона 70 в примере исполнения, показанном на фиг.7, имеет круглую форму, но может быть также прямоугольной, треугольной или иметь любую другую форму. Однако необходимо обеспечить, чтобы как можно больше света от расположенного на большом расстоянии целевого объекта могло попадать на светочувствительную поверхность.
Наряду с этим детектор 54 согласно примеру исполнения, показанному на фиг.7, имеет вторую светочувствительную зону 74, которая служит в качестве элемента 68 ближней зоны и уже описанным образом используется, в частности, для приема и обнаружения составляющих измерительного сигнала при уменьшении расстояний до целевого объекта.
Вторая зона 74 или образованный этой зоной элемент 68 ближней зоны имеет также удлиненную форму в направлении 61 смещения луча, которая, однако, в примере исполнения, показанном на фиг.7, имеет постоянную поперечную протяженность. Такая форма целесообразна, например, в том случае, когда эффект закона квадратов расстояния, с одной стороны, и эффект более или менее плохой фокусировки, с другой стороны, по существу уравновешиваются.
Отдельные поверхности 70 и 72 могут быть связаны друг с другом, в частности образовывать единое целое, или могут быть выполнены раздельно и при этом даже иметь раздельное управление. Однако во всех вариантах исполнения речь идет, в частности, о связной светочувствительной поверхности 66, состоящей из отдельных поверхностей 70 и 72.
На фиг.8 показан вариант элемента ближней зоны с постоянной поперечной протяженностью в направлении 61 смещения луча. В этом варианте исполнения вся светочувствительная поверхность 66 детектора имеет, например, прямоугольную форму. Отдельные поверхности 70 и 74 не ограничены друг от друга и плавно переходят друг в друга. Только для определения различных зон, используемых для различных расстояний до объекта, в упрощенном схематическом изображении на фиг.8 показана штриховая разделительная линия 80, которая в устройстве, естественно, отсутствует.
На фиг.9 показана возможность реализации отдельных примеров исполнения предлагаемого в изобретении детектора 54. Если в примерах исполнения, приведенных на фиг.2-8, эффективная, т.е. светочувствительная, поверхность 66 детектора 54 равна общей поверхности детектора, в примере исполнения согласно фиг.9 оптически активная, т.е. светочувствительная рабочая поверхность 66 получена из первоначально большей поверхности 82 детектора. Для этого на оптически чувствительную поверхность полупроводникового детектора, имеющего, например, прямоугольную рабочую поверхность детектора, в определенных зонах наносят светонепроницаемый слой 84, вследствие чего полупроводниковый детектор в этих зонах становится не активным, а светочувствительной остается только не имеющая покрытия отдельная поверхность 66. Этой активной отдельной поверхности 66 при изготовлении придают любую нужную форму, в частности также формы показанных на фиг.2-9 поверхностей 66 детектора. Для создания этого светонепроницаемого слоя можно использовать, например, способ напыления металлического покрытия на нужные места первоначальной поверхности детектора. Описанная в заявке форма активной поверхности детектора могла бы быть реализована также простой механической маской или блендой. Разумеется, для этой цели можно использовать и другие известные специалисту меры по устранению активности полупроводниковой поверхности, поэтому здесь нет надобности останавливаться на других деталях возможного изготовления.
Общим для всех вариантов исполнения в рассмотренных примерах является то, что активная, т.е. светочувствительная, поверхность элемента ближней зоны предлагаемого в изобретении детектора в направлении смещения луча не сужается вследствие параллакса при уменьшении расстояний до целевого объекта. Точная форма изменения поверхности детектора с увеличением расстояния от оптической оси передатчика зависит, в частности, от нужного диапазона измерений, в котором должно работать предлагаемое в изобретении измерительное устройство. При оптимизации размеров и формы светочувствительных зон необходимо учитывать также геометрию устройства и оптические условия отображения в приемнике.
Предлагаемое в изобретении устройство не ограничивается примерами исполнения, приведенными в описании и на чертежах.
В частности, устройство не ограничивается представленными формами или числом отдельных светочувствительных поверхностей детектора. Кроме того, изменение поперечной протяженности не обязательно должно происходить непрерывно, а может быть реализовано дискретно, например отдельными ступенями.
Устройство включает передатчик (12) с источником (17, 18) света для посылки оптического измерительного излучения (13, 20, 22) в направлении целевого объекта (15) и приемник (14). Приемник расположен на расстоянии от оптической оси (38) передатчика (12) и содержит по меньшей мере один оптический детектор (54) со светочувствительной поверхностью (66). Детектор принимает возвращающееся от целевого объекта (15) оптическое излучение (16, 49, 50). Светочувствительная поверхность (66) детектора (54) имеет оптический элемент (68) ближней зоны. Его светочувствительная поверхность (72, 74) вытянута в направлении (61) смещения луча при уменьшении расстояний (48) до целевого объекта и по меньшей мере частично расширяется перпендикулярно этому направлению либо имеет перпендикулярно этому направлению по существу постоянную протяженность. Технический результат - повышение качества измерений в широком диапазоне за счет устранения последствий расфокусировки и компенсации эффекта уменьшения поверхностной плотности измерительного сигнала. 10 з.п. ф-лы, 9 ил.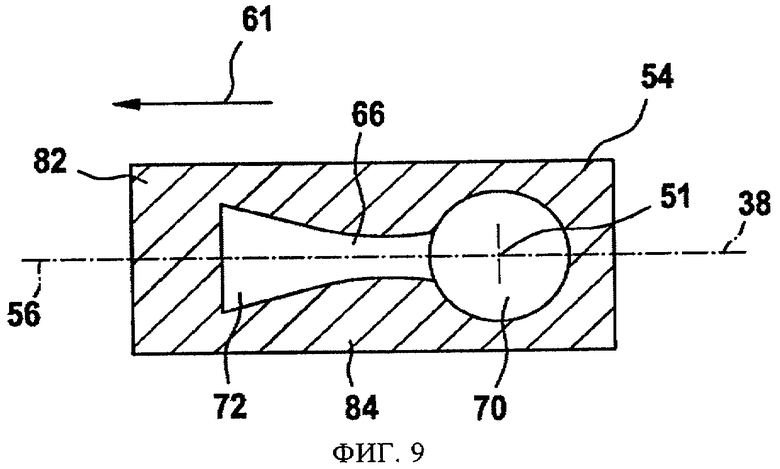
1. Устройство для оптического измерения расстояний, включающее в себя передатчик (12) с источником (17, 18) света для посылки оптического измерительного излучения (13, 20, 22) в направлении целевого объекта (15) и приемник (14), расположенный на расстоянии от оптической оси (38) передатчика (12) и содержащий по меньшей мере один оптический детектор (54) со светочувствительной поверхностью (66) для приема возвращающегося от целевого объекта (15) оптического излучения (16, 49, 50), отличающееся тем, что светочувствительная поверхность (66) детектора (54) имеет оптический элемент (68) ближней зоны, светочувствительная поверхность (72, 74) которого вытянута в направлении (61) смещения луча при уменьшении расстояний (48) до целевого объекта и по меньшей мере частично расширяется перпендикулярно этому направлению либо имеет перпендикулярно этому направлению, по существу, постоянную протяженность.
2. Устройство по п.1, отличающееся тем, что светочувствительная поверхность (66, 70, 72, 74) детектора (54) имеет ось симметрии, расположенную в общей плоскости (56) оптических осей (38, 51) передатчика и приемника.
3. Устройство по п.1, отличающееся тем, что протяженность светочувствительной поверхности (66, 70, 72, 74) детектора (54) по меньшей мере такова, чтобы обеспечивать полное обнаружение измерительного пятна (58) излучения (16, 49), возвращающегося от целевого объекта (15) при большом расстоянии до объекта.
4. Устройство по п.1, отличающееся тем, что протяженность светочувствительной поверхности (66, 70, 72, 74) детектора (54) в направлении, перпендикулярном оптической оси (51) приемника (14), по меньшей мере такова, что измерительный луч (50), возвращающийся от целевого объекта (15) в ближней зоне, по меньшей мере частично попадает на светочувствительную поверхность (72, 74).
5. Устройство по п.1, отличающееся тем, что светочувствительная поверхность (66, 70, 72, 74) детектора (54) образована частичным перекрытием большей светочувствительной поверхности (82) детектора.
6. Устройство по п.5, отличающееся тем, что светочувствительная поверхность (66, 70, 72, 74) детектора (54) образована частичным нанесением светонепроницаемого слоя (84) на первоначально большую светочувствительную поверхность (72) детектора.
7. Устройство по п.1, отличающееся тем, что источником (17, 18) света является лазер.
8. Устройство по п.7, отличающееся тем, что источником (17, 18) света является лазерный диод (18).
9. Устройство по пп.1, 7 или 8, отличающееся тем, что источник (17, 18) света испускает излучение в видимом для человеческого глаза диапазоне длин волн спектра электромагнитных волн.
10. Устройство по одному из пп.1-8, отличающееся тем, что оно является портативным.
11. Устройство по п.9, отличающееся тем, что оно является портативным.
| US 6833909 В2, 21.12.2004 | |||
| US 5354983 А, 11.10.1994 | |||
| DE 10130763 A1, 02.01.2003 | |||
| Импульсный лазерный дальномер | 1982 |
|
SU1045713A1 |

