Перекрестная ссылка на связанные патентные заявки
[0001] Эта патентная заявка заявляет приоритет совместной заявки на патент США номер 15/898132 (номер в реестре 20151-2161), поданной 15 февраля 2018 г., озаглавленной "СИСТЕМЫ И СПОСОБЫ ПОДАВЛЕНИЯ ЗАСВЕТКИ ЛАВИННОГО ФОТОДИОДА (ЛФД)", в которой в качестве авторов изобретения перечислены Kiran Kumar Gunnam, Nitinkumar Sagarbhai Barot, Rajesh Ramalingam Varadharajan, Rojer Jullian Pinto, Kanke Gao, причем этот патентный документ включен сюда во всей своей полноте и для всех целей посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
A. Область техники
[0002] Настоящее раскрытие в целом относится к системам и способам для лавинного фотодиода (ЛФД), и, более конкретно, для ЛФД, используемых в приложениях для регистрации света, таких как система обнаружения и определения дальности с помощью света (лазерная система обнаружения и измерения дальности, LIDAR).
B. Предпосылки изобретения
[0003] В системе обнаружения и определения дальности с помощью света, такой как система LIDAR, множественные максимумы в возвратном сигнале могут быть приняты как близко отстоящие по времени друг от друга. Поскольку фотодиоды систем LIDAR могут насыщаться и демонстрировать явление лавинного восстановления обратного смещения, при регистрации с помощью ЛФД может возникать пятно засветки. Пятно засветки может ограничивать способность системы LIDAR регистрировать максимумы в множественно-возвратном световом сигнале. В этой ситуации ЛФД может быть нечувствительным к свету и быть не способным регистрировать максимум в множественно-возвратном световом сигнале до тех пор, пока ЛФД не восстановится от насыщения.
[0004] Соответственно, имеется необходимость в системах и способах, которые подавляют засветку ЛФД и обеспечивают возможность точной регистрации множественно-возвратных световых сигналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Ниже будут выполнены ссылки на варианты осуществления изобретения, примеры которых могут быть показаны на сопроводительных фигурах. Эти фигуры предназначены быть иллюстрирующими, но не ограничивающими. Хотя изобретение в целом описывается в контексте этих вариантов осуществления, следует понимать, что не предполагается ограничивать объем изобретения этими конкретными вариантами осуществления. Элементы на фигурах приведены не в масштабе.
[0006] Фиг.1 отображает работу системы обнаружения и определения дальности с помощью света в соответствии с вариантами осуществления по настоящему документу.
[0007] Фиг.2 иллюстрирует работу системы обнаружения и определения дальности с помощью света и множественно-возвратные световые сигналы в соответствии с вариантами осуществления по настоящему документу.
[0008] Фиг.3 отображает систему LIDAR с поворотным зеркалом в соответствии с вариантами осуществления по настоящему документу.
[0009] Фиг.4A графически иллюстрирует вольтамперные характеристики фотодиода в соответствии с вариантами осуществления по настоящему документу.
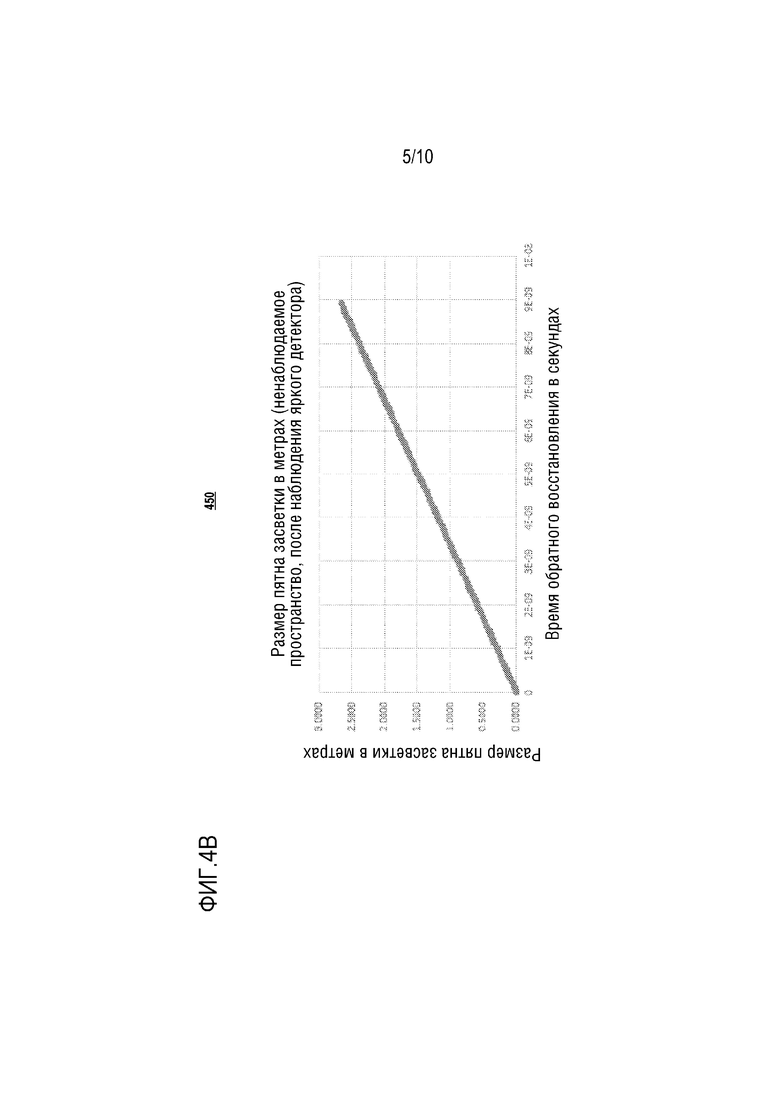
[0010] Фиг.4B графически иллюстрирует размер пятна засветки в соответствии с вариантами осуществления по настоящему документу.
[0011] Фиг.5 графически иллюстрирует регистрируемый множественно-возвратный световой сигнал, содержащий пятно засветки, в соответствии с вариантами осуществления по настоящему документу.
[0012] Фиг.6 отображает детектор света с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу.
[0013] Фиг.7A, 7B, 7C графически иллюстрируют формы сигнала для работы детектора света с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу.
[0014] Фиг.8 отображает блок-схему последовательности операций для регистрации множественно-возвратных световых сигналов с использованием детектора света с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу.
[0015] Фиг.9 отображает упрощенную блок-схему вычислительного устройства/системы обработки информации в соответствии с вариантами осуществления по настоящему документу.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0016] В нижеследующем описании в целях объяснения излагаются конкретные подробности для обеспечения понимания изобретения. Однако специалисту в данной области техники будет очевидно, что изобретение может быть осуществлено на практике без этих подробностей. Кроме того, специалист в данной области техники поймет, что описанные ниже варианты осуществления настоящего изобретения могут быть реализованы различным образом, таким как процесс, аппарат, система, устройство или способ на материальном машиночитаемом носителе.
[0017] Компоненты или модули, показанные на схемах, иллюстрируют примерные варианты осуществления изобретения и предназначены для исключения затруднений в понимании изобретения. Следует также понимать, что в течение данного обсуждения эти компоненты могут быть описаны как отдельные функциональные блоки, которые могут содержать подблоки, но специалисты в данной области техники поймут, что различные компоненты или их части могут быть разделены на отдельные компоненты или могут быть объединены вместе, включая интегрирование в пределы единой системы или компонента. Следует отметить, что обсуждаемые здесь функции или операции могут быть реализованы в виде компонентов. Компоненты могут быть реализованы в программном обеспечении, аппаратном обеспечении или в их комбинации.
[0018] Кроме того, соединения между компонентами или системами в пределах фигур не предназначены ограничиваться прямыми соединениями. Вместо этого, данные между этими компонентами могут быть изменены, переформатированы или иным образом изменены с помощью промежуточных компонентов. Кроме того, могут использоваться дополнительные соединения или меньшее их число. Следует также отметить, что термины "связанный", "соединенный" или "соединен с возможностью связи" следует понимать как включающие прямые соединения, непрямые соединения через одно или более промежуточных устройств и беспроводные соединения.
[0019] Ссылка в спецификации на "один вариант осуществления", "предпочтительный вариант осуществления", "вариант осуществления" или "варианты осуществления" означает, что конкретный признак, структура, характеристика или функция, описываемые в связи с вариантом осуществления, включены в по меньшей мере один вариант осуществления изобретения и могут быть в более чем одном варианте осуществления. Кроме того, появления вышеупомянутых фраз в различных местах спецификации не обязательно все относятся к одному и тому же варианту осуществления или вариантам осуществления.
[0020] Использование определенных терминов в различных местах в спецификации предназначено для иллюстрации и не должно истолковываться как ограничение. Сервис, функция или ресурс не ограничивается единственным сервисом, функцией или ресурсом; использование этих терминов может относиться к группированию связанных сервисов, функций или ресурсов, которые могут быть распределены или объединены.
[0021] Термины "включает в себя", "включающий в себя", "содержит", и "содержащий" следует понимать как открытые термины, и любые следующие ниже списки являются примерами и не предназначены для ограничения перечисленными элементами. Любые используемые здесь заголовки предназначены исключительно в организационных целях и не должны использоваться для ограничения объема описания или формулы изобретения. Каждая ссылка, упоминаемая в этом патентном документе, включена сюда во всей своей полноте посредством ссылки.
[0022] Кроме того, специалист в данной области техники поймет, что: (1) выполнение определенных этапов может быть необязательным; (2) этапы могут не быть ограничены определенным порядком, изложенным здесь; (3) определенные этапы могут быть выполнены в других порядках; и (4) определенные этапы могут быть выполнены одновременно.
A. Система обнаружения и определения дальности с помощью света
[0023] Система обнаружения и определения дальности с помощью света, такая как система LIDAR (лазерная система обнаружения и измерения дальности), может быть инструментом для измерения форм и контуров среды, окружающей систему. Системы LIDAR могут быть применены в многочисленных приложениях, включая и автономную навигацию, и картографическую аэросъемку поверхности. Системы LIDAR испускают световой импульс, который впоследствии отражается от объекта в пределах среды, в которой работает система. Объект может рассматриваться как "отражатель". Время распространения каждого импульса от момента испускания до момента приема (то есть время пролета "TOF") может быть измерено для определения расстояния между объектом и системой LIDAR. Данная область техники основана на физике света и оптике.
[0024] В системе LIDAR свет может быть испущен из быстро возбуждаемого лазера. Лазерный свет распространяется через среду и отражается от точек расположения объектов в среде, таких как строения, ветви деревьев и транспортные средства. Отраженная световая энергия возвращается в приемник системы LIDAR (детектор), где она регистрируется и используется для картографирования среды.
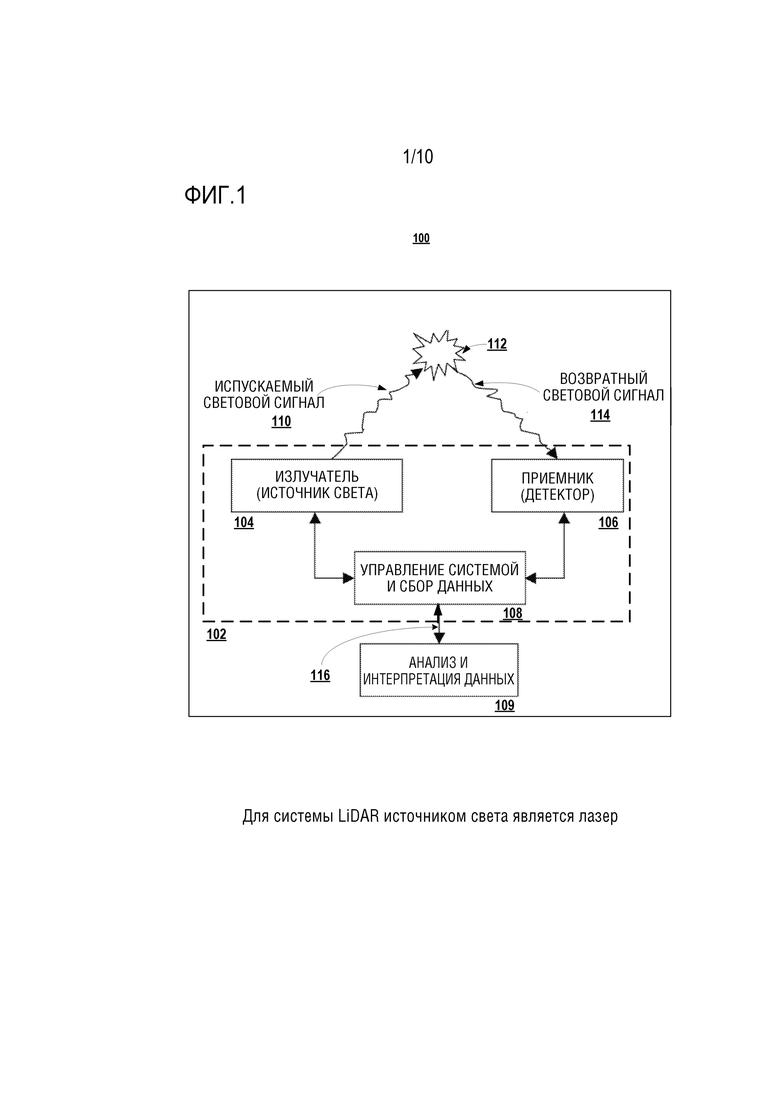
[0025] Фиг.1 отображает работу 100 компонентов 102 обнаружения и определения дальности с помощью света и блок 109 анализа и интерпретации данных в соответствии с вариантами осуществления по настоящему документу. Компоненты 102 обнаружения и определения дальности с помощью света могут содержать излучатель 104, который передает испускаемый световой сигнал 110, приемник 106, содержащий детектор, и блок 108 управления системой и сбора данных. Испускаемый световой сигнал 110 распространяется через среду и отражается от объекта 112. Возвратный световой сигнал 114 распространяется через упомянутую среду и принимается приемником 106. Блок 108 управления системой и сбора данных может управлять испусканием света излучателем 104, а блок сбора данных может записывать возвратный световой сигнал 114, регистрируемый приемником 106. Блок 109 анализа и интерпретации данных может принимать выходной сигнал через соединение 116 от блока 108 управления системой и сбора данных и выполнять функции анализа данных. Соединение 116 может быть реализовано с помощью контактного или бесконтактного способа связи. Излучатель 104 и приемник 106 могут включать в себя оптическую линзу (не показана). Передатчик 104 может испускать лазерный луч, имеющий множество импульсов в конкретной последовательности. В некоторых вариантах осуществления компоненты 102 обнаружения и определения дальности с помощью света и блок 109 анализа и интерпретации данных содержат систему LIDAR.
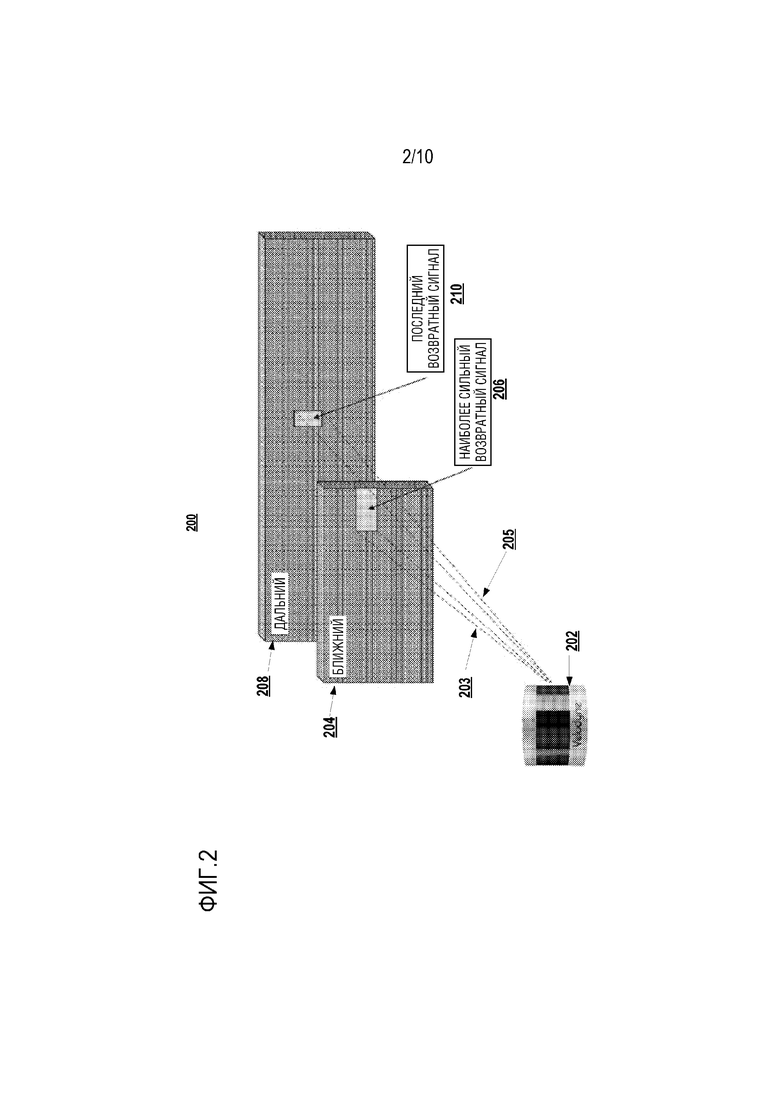
[0026] Фиг.2 иллюстрирует работу 200 системы 202 обнаружения и определения дальности с помощью света, в том числе множественно-возвратные световые сигналы: (1) возвратный сигнал 203 и (2) возвратный сигнал 205 в соответствии с вариантами осуществления по настоящему документу. Система 202 обнаружения и определения дальности с помощью света может быть системой LIDAR. Вследствие расходимости лазерного пучка, импульсы, возбуждаемые единичным лазером, часто сталкиваются с несколькими объектами, образуя несколько (множественные) возвратных сигналов. Система 202 обнаружения и определения дальности с помощью света может анализировать множественные возвратные сигналы и может сообщать либо о самом сильном возвратном сигнале, последнем возвратном сигнале, либо об обоих возвратных сигналах. На Фиг.2 система 202 обнаружения и определения дальности с помощью света испускает лазерный луч в направлении ближней стенки 204 и дальней стенки 208. Как показано, большая часть пучка сталкивается с ближней стенкой 204 в области 206, что приводит к возвратному сигналу 203, а другая часть пучка сталкивается с дальней стенкой 208 в области 210, что приводит к возвратному сигналу 205. Возвратный сигнал 203 может иметь более короткое TOF (время пролета) и большую интенсивность принимаемого сигнала по сравнению с возвратным сигналом 205. Система 202 обнаружения и определения дальности с помощью света может записывать оба возвратных сигнала, только если расстояние между двумя объектами больше минимального расстояния. В системах LIDAR и с единственным, и с множественными возвратными сигналами важно, чтобы возвратный сигнал был точно связан с передаваемым световым сигналом, в результате чего вычисляется точное значение TOF.
[0027] В некоторых вариантах осуществления системы LIDAR данные о расстоянии могут захватываться в виде 2-D облака точек (то есть в единственной плоскости). Эти системы LIDAR часто могут использоваться в промышленных приложениях и часто могут перепрофилироваться для геодезической съемки, картографирования, автономной навигации и других применений. Некоторые варианты осуществления этих устройств основываются на использовании единственной пары лазерный излучатель/детектор, скомбинированной с некоторым типом перемещаемого зеркала для осуществления сканирования по меньшей мере по одной плоскости. Это зеркало не только отражает свет, испускаемый диодом, но может также отражать возвратный свет на детектор. Использование поворотного зеркала в этой заявке может быть средством достижения 90-180-360 градусного азимутального обзора при упрощении как конструкции системы, так и технологичности изготовления.
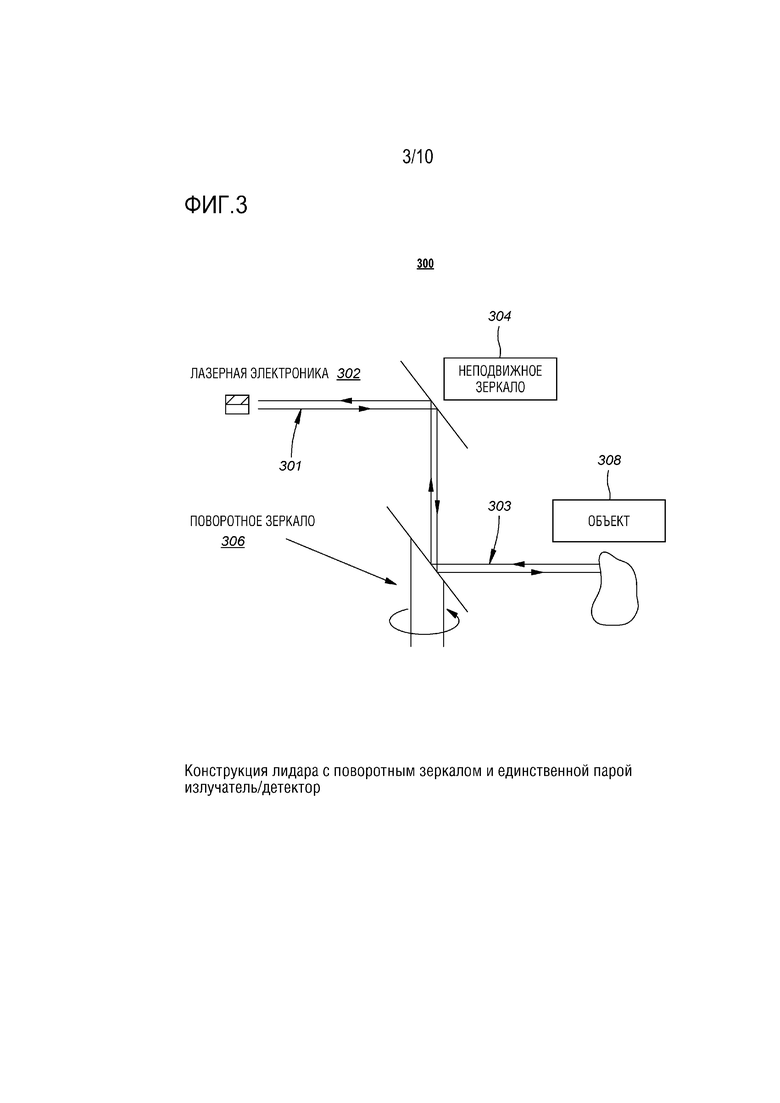
[0028] Фиг.3 отображает систему 300 LIDAR с поворотным зеркалом в соответствии с вариантами осуществления по настоящему документу. В системе 300 LIDAR используется единственный лазерный излучатель/детектор, объединенный с поворотным зеркалом для эффективного сканирования по плоскости. Измерения расстояния, выполняемые такой системой, фактически двумерны (то есть планарны), и захватываемые точки расстояния воспроизводятся как 2-D облако точек (то есть в единственной плоскости). В некоторых вариантах осуществления, но без ограничений, поворотные зеркала вращаются на очень больших скоростях, например, тысячи оборотов в минуту. Поворотное зеркало может также называться вращающимся зеркалом.
[0029] Система 300 LIDAR содержит лазерную электронику 302, которая содержит единственный излучатель света и детектор света. Испускаемый лазерный сигнал 301 может быть направлен на неподвижное зеркало 304, которое отражает испускаемый лазерный сигнал 301 на поворотное зеркало 306. Поскольку поворотное зеркало 306 "поворачивается", испускаемый лазерный сигнал 301 может отражаться от объекта 308 на своем пути распространения. Отраженный сигнал 303 может быть подан на детектор в лазерной электронике 302 через поворотное зеркало 306 и неподвижное зеркало 304.
[0030] Как отмечается выше, времяпролетный метод или метод TOF представляет собой метод, использующий систему LIDAR, для составления карты среды и обеспечивает перспективную и подтвержденную методику, используемую для регистрации целевых объектов. Одновременно с возбуждением лазерных импульсов встроенное программное обеспечение в системе LIDAR может анализировать и измерять принимаемые данные. Оптическая приемная линза в системе LIDAR действует как телескоп, собирающий фрагменты фотонов света, возвращающихся из окружающей среды. Чем больше лазеров используется в системе, тем больше информации об окружающей среде может быть собрано. Системы LIDAR с единственным лазером могут находиться в невыгодном положении по сравнению с системами с множественными лазерами, потому что меньшее количество фотонов может быть возвращено, поэтому может быть собрано меньше информации. Некоторые варианты осуществления, но без ограничения, систем LIDAR были реализованы с 8, 16, 32 и 64 лазерами. Кроме того, некоторые варианты осуществления LIDAR, но без ограничения, могут иметь вертикальное поле обзора (FOV) 30-40° с лазерным лучом, распространяющимся с углом расходимости 0,3°, и могут иметь скорости вращения 5-20 оборотов в секунду.
[0031] Функциональные возможности поворотного зеркала могут также быть реализованы с помощью твердотельных технологий, таких как MEMS (микроэлектромеханические системы).
B. Лавинные фотодиоды (ЛФД) в детекторах множественно-возвратных световых сигналов
[0032] Как обсуждено относительно Фиг.2, в системе LIDAR один лазерный импульс может сталкиваться с множественными объектами на различном расстоянии на одной линии, что приводит к приему множественных возвратных сигналов. Регистрация множественных возвратных световых сигналов в этих средах может быть чрезвычайно затруднена для системы LIDAR, особенно когда лавинный фотодиод (ЛФД) системы LIDAR насыщается, что приводит к пятну засветки, и неспособен регистрировать максимум в множественно-возвратном сигнале. Используемый здесь термин "максимум" эквивалентен термину "импульс" множественно-возвратного сигнала.
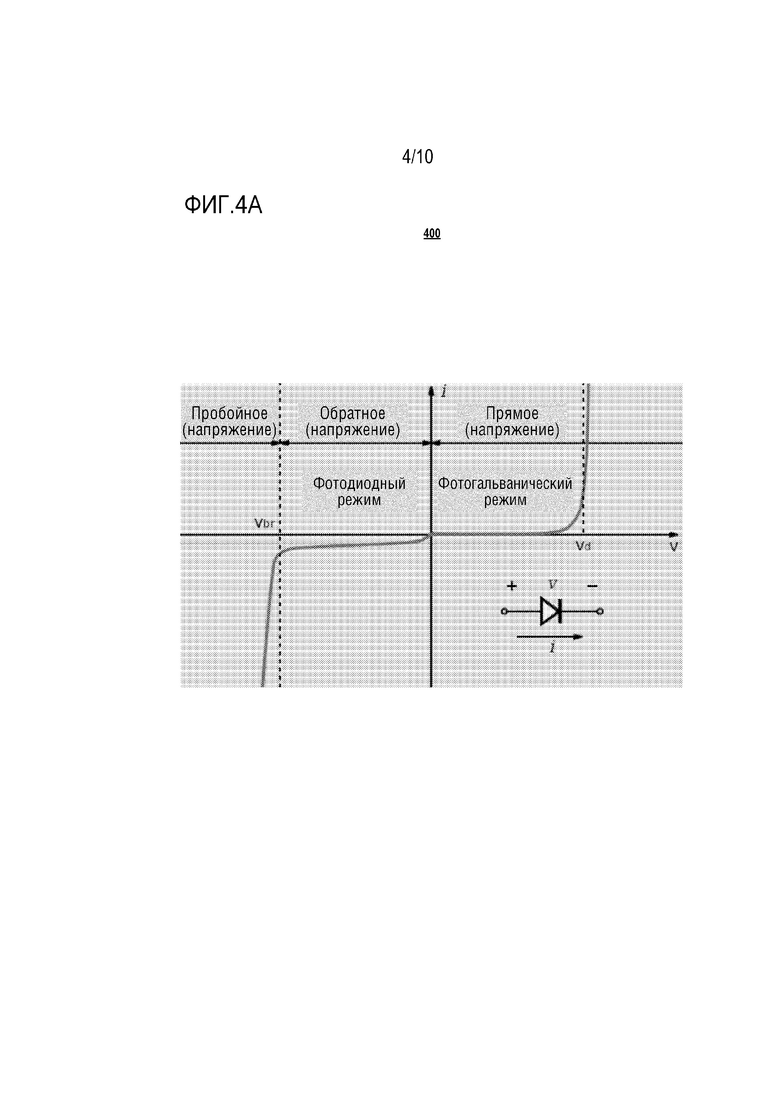
[0033] Фотодиод представляет собой полупроводниковое устройство, которое преобразует свет в электрический ток. Ток возникает при поглощении фотонов в фотодиоде. Небольшое количество тока может также производиться, когда свет отсутствует. Фиг.4A графически иллюстрирует вольтамперные (IV) 400 характеристики фотодиода в соответствии с вариантами осуществления по настоящему документу. При использовании с нулевым смещением или в фотогальваническом режиме поток фототока из устройства ограничен и напряжение растет. В этом режиме используется фотогальванический эффект, который лежит в основе работы солнечных элементов. Напряжение Vd обозначает напряжение, которое обычно рассматривается как "включенное" состояние диода.
[0034] Интерес для вариантов осуществления по настоящему документу представляет работа в фотодиодном режиме, в котором фотодиод работает при обратном смещении. На Фиг.4A с увеличением обратного напряжения смещения отрицательный ток, i, увеличивается приблизительно линейным образом до наступления напряжения Vbr пробоя. После пробоя отрицательный ток, i, может значительно увеличиться, поскольку фотодиод насыщается. Фотодиод может затем войти в режим восстановления обратного смещения. В режиме восстановления обратного смещения фотодиод может быть нечувствительным к свету; следовательно, в процессе регистрации может возникать пятно засветки.
[0035] В общем случае фотодиод датчика LIDAR представляет собой ЛФД. Лавинные фотодиоды представляют собой фотодиоды со структурой, оптимизированной для работы при высоком обратном смещении, приближающемся к обратному напряжению пробоя. Такая структура позволяет каждому фотогенерированному носителю быть умноженным посредством лавинного пробоя, что приводит к внутреннему усилению в пределах фотодиода, которое увеличивает эффективную чувствительность устройства.
[0036] Как отмечено выше, когда ЛФД находится в режиме восстановления обратного смещения, фотодиод может быть нечувствительным к свету. В этом случае регистрация света системой LIDAR может предотвращаться до тех пор, пока фотодиод не восстановится до режима работы с обратным смещением. Например, в системах ночного видения на основе лазера могут не преодолеваться эффекты засветки, связанные с сильноотражающими объектами. Многие дорожные знаки имеют сильноотражающие поверхности для отражения света ламп накаливания, такого как свет, испускаемый фарами транспортного средства, для упрощения непосредственного обзора оператором транспортного средства. Дорожные знаки часто покрываются световозвратной краской, которая может отражать большое количество света и вызывать насыщение изображения. Насыщенное изображение может быть в общем случае неясным и нечитаемым. Большие плоские поверхности, такие как поверхности на грузовиках, автобусах и фургонах, могут также вызвать насыщение изображения. Когда яркий свет находится близко к отражателю, возвратный сигнал на детекторе света может насыщать ЛФД, вызывая пятно засветки. Регистрация пятен засветки может быть особенно важна при регистрации прозрачных объектов, например, стеклянных киосков в углах улиц.
[0037] В некоторых вариантах осуществления, но без ограничения, время восстановления может составлять несколько наносекунд, например, но без ограничения, 2-6 наносекунд, которые могут вызывать пятно засветки в несколько метров. Фиг.4B графически иллюстрирует размер пятна засветки 450 в соответствии с вариантами осуществления по настоящему документу. Конкретно, на Фиг.4B показано, что размер пятна засветки в метрах зависит от времени обратного восстановления в секундах.
C. Подавление пятен засветки в ЛФД
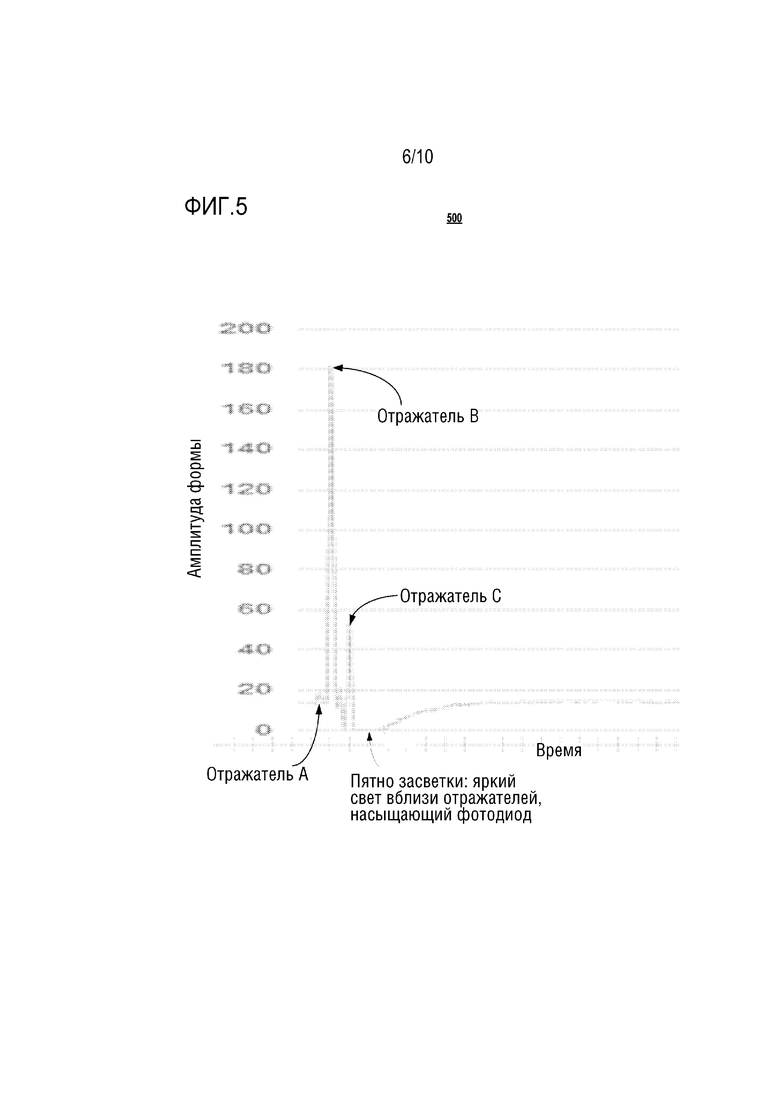
[0038] Фиг.5 графически иллюстрирует регистрируемый множественно-возвратный световой сигнал 500, содержащий пятно засветки, в соответствии с вариантами осуществления по настоящему документу. Система регистрации света, используемая в процессе регистрации, может быть системой LIDAR, и система регистрации света может выполнять регистрацию с помощью единственного ЛФД. Множественно-возвратный световой сигнал 500 содержит последовательность импульсов и пятно засветки. Как обсуждено выше, когда яркий свет находится близко к отражателю, возвратный сигнал, приходящий на детектор света, может насыщать ЛФД, вызывая пятно засветки. Эта ситуация может снизить точность системы LIDAR, что нельзя предотвратить путем калибровки. Например, лазерный луч может быть возбужден и отражен от нескольких отражателей. Как показано на Фиг.5, множественно-возвратный световой сигнал 500 содержит последовательность из трех максимальных (пиковых) сигналов, обозначенных как Отражатель A, Отражатель B и Отражатель C. Величина максимальных сигналов может указывать на расстояние и информацию об отражателе. Фиг.5 также содержит пятно засветки, которое может быть вызвано тем, что яркий свет может находиться в непосредственной близости к отражателям, вызывая насыщение ЛФД. Четвертый максимум мог быть расположен сразу после Отражателя C, но не был зарегистрирован системой LIDAR из-за пятна засветки. Фактически, четвертый максимум представлял собой "скрытый максимум". В некоторых вариантах осуществления максимум Отражателя C может перекрываться с четвертым максимумом. Фиг.5 показывает проблемы работы при декодировании последовательных световых импульсов в множественно-возвратном световом сигнале 500, когда в детекторе света для декодирования используется единственный ЛФД.
[0039] Варианты осуществления по настоящему документу предлагают использование резервных ЛФД в системе регистрации света для улучшения точности регистрации. Например, может быть один резервный ЛФД для поддержки каждой группы, одновременно возбуждающей лазерные импульсы. Существующие системы LIDAR могут включать в себя множественные ЛФД с функцией управления возбуждением, что дает возможность выполнять регистрацию одному ЛФД в момент времени. Один вариант осуществления настоящих документов будет сконфигурирован с одним резервным ЛФД для поддержки множественных ЛФД.
[0040] При реализации резервного ЛФД, для минимизации вероятности засветки может использоваться пространственное разнесение. Пространственное мультиплексирование может быть реализовано путем позиционирования резервного ЛФД вне главной оптической плоскости так, чтобы резервный ЛФД мог принимать меньше мощности, чем первичный ЛФД, который позиционирован на главной оптической плоскости. Первичные ЛФД представляют собой "чувствительные" ЛФД, поскольку они могут быть позиционированы на главной фокальной плоскости, так что они не являются поглощающими и их работа не ограничена. Следовательно, оптическое разделение между чувствительными ЛФД и резервным ЛФД может обеспечить возможность поглощения принимаемой оптической мощности в резервном ЛФД; отсюда следует термин "поглощающий резервный ЛФД". Поглощенный входной сигнал может гарантировать, что поглощающий резервный ЛФД может не насыщаться тогда, когда чувствительный ЛФД становится насыщенным. "Поглощающий резервный ЛФД" может называться вторичным ЛФД, а "чувствительный ЛФД" может называться первичным ЛФД.
[0041] Дополнительно, вариант осуществления по настоящему документу может улучшать эффективность регистрации с включением временного разнесения. Временное разнесение может быть достигнуто за счет задержки сигнала смещения на резервном ЛФД относительно сигнала смещения на чувствительном ЛФД.
1. Детектор света с резервным ЛФД
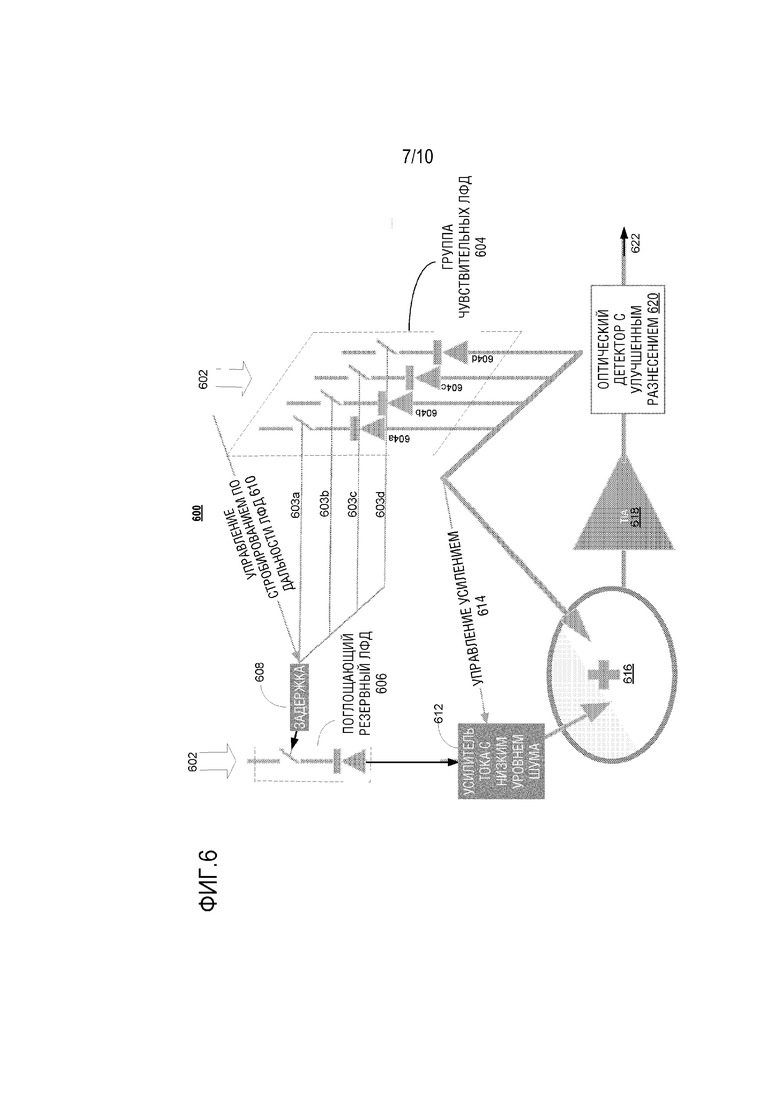
[0042] Фиг.6 отображает детектор 600 света с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу. Детектор 600 света может быть использован в системе LIDAR. Детектор 600 света включает в себя функции пространственного разнесения и временного разнесения и содержит четыре первичных (чувствительных) ЛФД и один вторичный (резервный) ЛФД. Вторичный ЛФД может работать с каким-либо одним из первичных ЛФД. Как описано здесь, детектор 600 света может работать на статической или динамической основе. В одном варианте осуществления статической работы работа вторичного ЛФД и первичных ЛФД может быть предварительно задана и может быть независимой от характеристик множественно-возвратных световых сигналов.
[0043] Множественно-возвратный световой сигнал может быть принят группой первичных ЛФД, включающей в себя чувствительные ЛФД 604a, 604b, 604c и 604d или группу 604 чувствительных ЛФД. Чувствительные ЛФД 604a, 604b, 604c и 604d могут быть активированы контроллером на основании последовательности возбуждаемых лазерных импульсов. Контроллер может быть блоком 610 управления стробированием по дальности ЛФД, который связан с чувствительными ЛФД 604a, 604b, 604c и 604d посредством сигналов 603a, 603b, 603c и 603d, соответственно. Блок 610 управления стробированием по дальности ЛФД может также быть связан с задержкой 608. Специалист в данной области техники поймет, что в других вариантах осуществления группа чувствительных ЛФД может содержать n-е количество ЛФД и может не быть ограниченной четырьмя ЛФД. В некоторых вариантах осуществления количество n первичных ЛФД может изменяться от 16 до 128.
[0044] В одном варианте осуществления поглощающий резервный ЛФД 606 может работать как резервный ЛФД для чувствительного ЛФД 604a. Блок 610 управления стробированием по дальности (селекторным импульсом по дальности) ЛФД активирует чувствительный ЛФД 604a, побуждая чувствительный ЛФД 604a принимать множественно-возвратный световой сигнал 602. Характеристики множественно-возвратного светового сигнала 602 могут вызвать пятно засветки для чувствительного ЛФД 604a в течение процесса регистрации. Одновременно блок 610 управления стробированием по дальности ЛФД активирует задержку 608, вызывая активацию поглощающего резервного ЛФД 606 с задержкой относительно активации чувствительного ЛФД 604a. Это задержанное стробирование смещения для поглощающего резервного ЛФД 606 предоставляет временное разнесение относительно чувствительного ЛФД 604a посредством задержки 608. Поскольку детектор 600 света последовательно управляет возбуждением лазерных импульсов, в группе 604 чувствительных ЛФД выбираются другие ЛФД, например, чувствительные ЛФД 604b, 604c и 604d. Поскольку каждый из этих других чувствительных ЛФД активируется, поглощающий резервный ЛФД 606 работает резервным образом для поддержки выбранного чувствительного ЛФД.
[0045] Поглощающий резервный ЛФД 606 может быть активирован блоком 610 управления стробированием по дальности ЛФД с временным разнесением относительно какого-либо из ЛФД в группе 604 чувствительных ЛФД. Задержка 608 может быть включена для обеспечения фактора временного разнесения между группой 604 чувствительных ЛФД и поглощающим резервным ЛФД 606. Размер шага задержки может быть частью ширины лазерного импульса. Временное разнесение может улучшить точность регистрации множественно-возвратных световых сигналов, как будет обсуждено относительно Фиг.7A, 7B, 7C.
[0046] Пространственное разнесение может быть реализовано следующим образом. Сначала каждый из ЛФД в группе 604 чувствительных ЛФД может быть расположен в другой оптической плоскости друг относительно друга. Поглощающий резервный ЛФД 606 может быть расположен в другой оптической плоскости, чем ЛФД в группе 604 чувствительных ЛФД. Оптическое разделение между ЛФД в группе 604 чувствительных ЛФД и резервным ЛФД может обеспечить поглощение принимаемой резервным ЛФД оптической мощности; отсюда следует термин "поглощающий резервный ЛФД 606". Пространственное разнесение может быть достигнуто через использование полупрозрачных зеркал. Например, но без ограничений, существующие зеркала могут иметь 2% коэффициент пропускания, поэтому можно поместить резервные ЛФД позади существующего зеркала, которое может быть в другой оптической плоскости.
[0047] Группа 604 чувствительных ЛФД может работать с поглощающим резервным ЛФД 606, подавляя вероятность засветки ЛФД. Чувствительный ЛФД 604a может быть активирован и может регистрировать последовательность возвратных сигналов. С временным разнесением (задержка) и пространственным разнесением поглощающий резервный ЛФД 606 может быть активирован для поддержки регистрации последовательности возвратных сигналов в детекторе света 600. Поглощающий резервный ЛФД 606 может регистрировать скрытый импульс, когда чувствительный ЛФД 604a насыщается и имеет пятно засветки, которое может негативно воздействовать на возможность регистрации чувствительным ЛФД 604a.
[0048] Выход поглощающего резервного ЛФД 606 может быть связан с усилителем 612 тока с низким уровнем шума для усиления его тока. Контроллер активирует управление 614 усилением, используя инвертированное управление коэффициентом усиления для управления получающимися выходными сигналами поглощающего резервного ЛФД 606 и чувствительного ЛФД 604a. Каждый получающийся выходной сигнал может иметь различное усиление, основанное на управлении инвертированием коэффициента усиления. Получающиеся выходные сигналы подаются на объединитель 616, который реализует обработку MIMO (ввода-вывода с отображением в память) с объединением с максимальным коэффициентом усиления. Выход объединителя 616 соединен с трансимпедансным усилителем (TIA) 618. Выход трансимпедансного усилителя 618 связан с оптическим детектором 620 с улучшенным разнесением, который выводит зарегистрированный множественно-возвратный сигнал 622.
[0049] Объединитель 616 может иметь нежелательный шум, возникающий двумя параллельными путями: один от усилителя 612 тока с низким уровнем шума (на основе поглощающего резервного ЛФД 606) и один от чувствительного ЛФД 604a. Динамическое взвешивание параллельных путей может уменьшить влияние шума. Например, если ток чувствительного ЛФД 604a ниже порога, ток от поглощающего резервного ЛФД 606 может быть динамически взвешен. Если ток чувствительного ЛФД 604a ниже уровня шума, ток чувствительного ЛФД 604a может быть динамически взвешен. В окружающей среде с высоким уровнем шума объединитель 616 прекращает объединение и только контролирует свои входные сигналы.
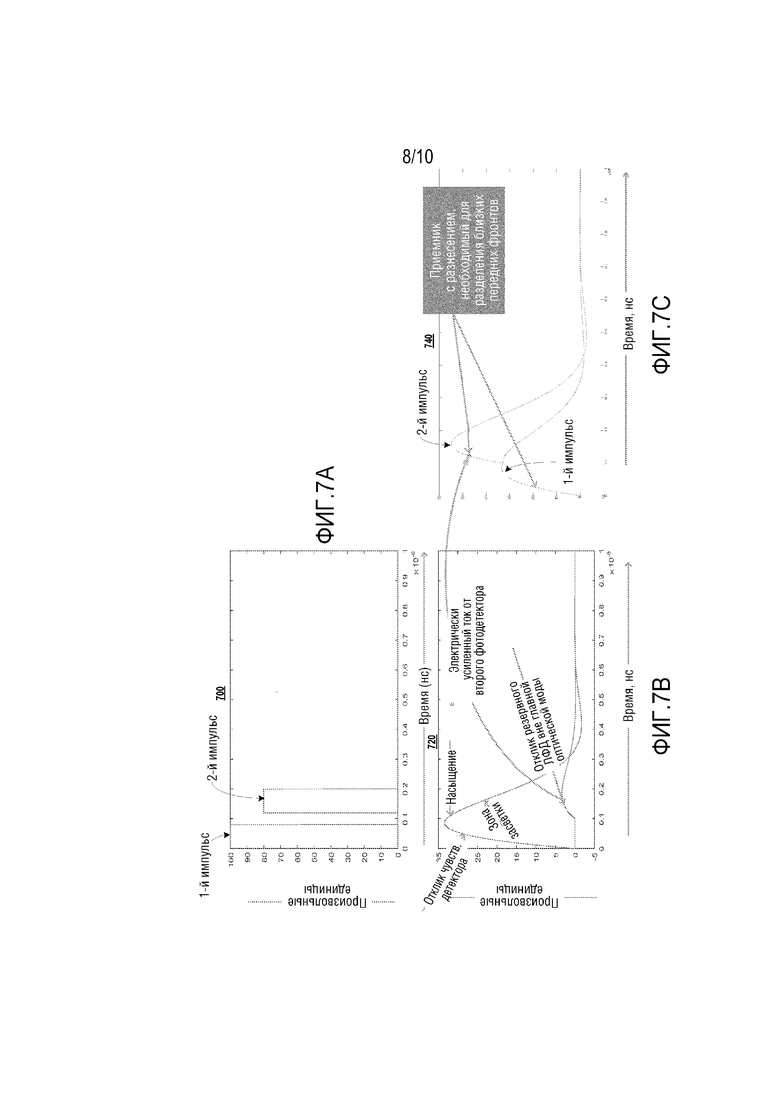
[0050] Фиг.7A, 7B и 7C графически иллюстрируют формы сигналов 700, 720 и 740 для работы детектора 600 света по Фиг.6 с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу. Конкретнее, Фиг.7A, 7B и 7C графически иллюстрируют формы сигналов, возникающие из чувствительного ЛФД 604a и поглощающего резервного ЛФД 606. Фиг.7A иллюстрируют два импульса множественно-возвратного светового сигнала 602, в котором первый импульс находится в непосредственной близости от второго импульса. Импульсы представлены в виде идеальных прямоугольных импульсов.
[0051] Фиг.7B иллюстрирует отклик или выходной сигнал чувствительного ЛФД 604a и поглощающего резервного ЛФД 606. В процессе генерирования этого выходного сигнала чувствительный ЛФД 604a может стать насыщенным, что приводит к пятну засветки (см. зону засветки). Другими словами, Фиг.7B иллюстрирует близко расположенный яркий отражатель, насыщающий чувствительный ЛФД 604a, то есть первичный ЛФД. Во время восстановления от насыщения чувствительный ЛФД 604a может быть неспособен зарегистрировать второй импульс. Типичное восстановление от насыщения может продолжаться в течение нескольких наносекунд (нс). Поэтому при ~30 см/нс, 6 нс могут привести к пятну засветки в 2 метра.
[0052] Фиг.7B также иллюстрирует отклик или выходной сигнал поглощающего резервного ЛФД 606 (то есть отклик резервного ЛФД), который расположен вне главной оптической оси чувствительного ЛФД 604a. Поэтому "резервный ЛФД" является поглощающим. На Фиг.7B величина "отклика чувствительного детектора" больше величины "отклика резервного ЛФД".
[0053] Выходной сигнал поглощающего резервного ЛФД 606 может быть электрически усилен с помощью усилителя 612 тока с низким уровнем шума, что приводит к формам сигнала 740 по Фиг.7C. Форма сигнала 740 показывает результат обработки MIMO с объединением с максимальным коэффициентом усиления для захвата двух событий в непосредственной близости.
[0054] Формы сигнала 740 содержат отклик чувствительного ЛФД 604a (первый импульс) и усиленный выходной сигнал поглощающего резервного ЛФД 606 (второй импульс). Вследствие усиления с помощью усилителя 612 тока с низким уровнем шума, импульс (второй импульс), регистрируемый поглощающим резервным ЛФД 606, теперь больше импульса (первого импульса), регистрируемого чувствительным ЛФД 604a. Форма сигнала 740 может быть декодирована приемником с разнесением, поскольку форма сигнала 740 включает в себя близкие передние фронты.
2. Способ регистрации света с помощью резервного ЛФД
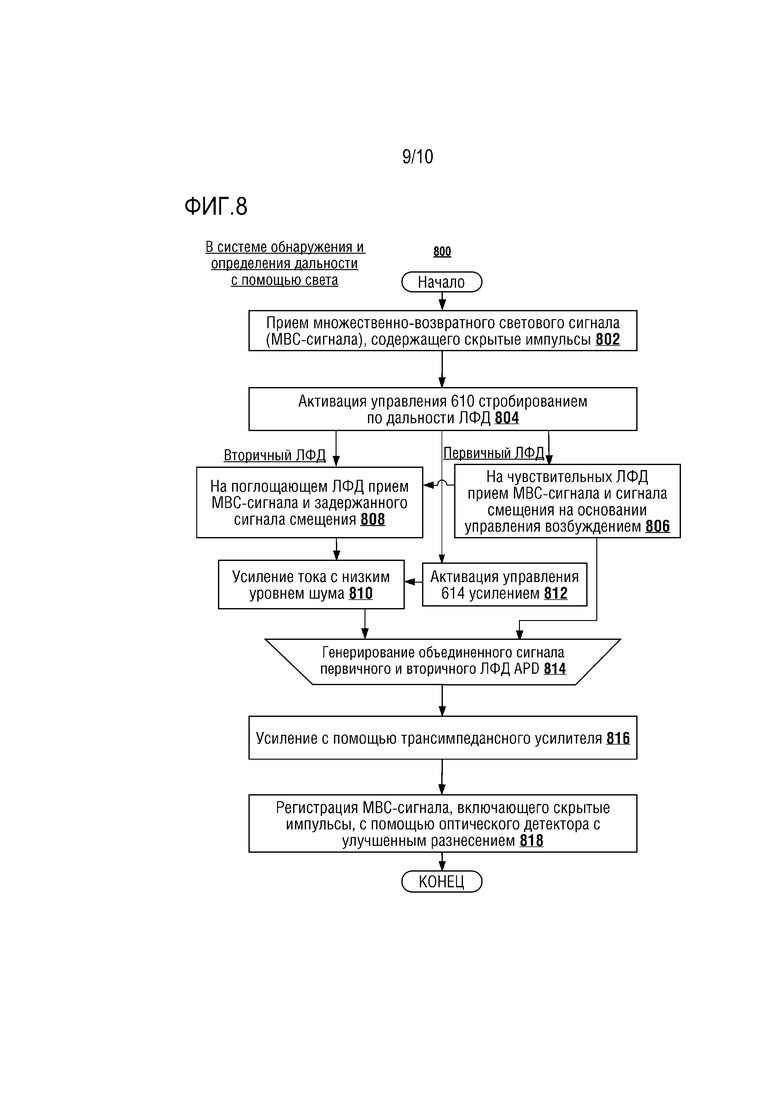
[0055] Описывается способ регистрации множественно-возвратного светового сигнала системой обнаружения и определения дальности с помощью света, например, системой LIDAR. Фиг.8 отображает блок-схему 800 последовательности операций для регистрации множественно-возвратных световых сигналов с использованием детектора света с резервным ЛФД в соответствии с вариантами осуществления по настоящему документу. Более конкретно, Фиг.8 описывает способ регистрации скрытого импульса в множественно-возвратном световом сигнале, в котором первый импульс вызывает насыщение первичного ЛФД, приводя к пятну засветки (см. Фиг.7B.)
[0056] На последующих этапах приводятся ссылки на некоторые элементы детектора 600 света. Кроме того, на последующих этапах первичный ЛФД может быть одним из чувствительных ЛФД 604abcd, а вторичный ЛФД может быть поглощающим резервным ЛФД 606. Этапы способа содержат:
[0057] Прием множественно-возвратного светового сигнала (МВС-сигнала), содержащего импульсы, которые могут находиться в непосредственной близости друг от друга. МВС-сигнал может содержать скрытый импульс, возникающий из-за близкорасположенного яркого отражателя, который может вызывать насыщение первичного ЛФД (детектора с высоким усилением) в детекторе 600 света (этап 802).
[0058] Активацию управления 610 стробированием по дальности ЛФД с генерированием сигнала смещения. Это действие определяет последовательность активации первичных ЛФД и вторичных ЛФД. Активируется управление 610 усилением (этап 804).
[0059] Прием на выбранном первичном ЛФД (детекторе с высоким усилением) сигнала смещения и МВС-сигнала. Первичный ЛФД может быть выбран из группы 604 чувствительных ЛФД на основании управления возбуждением импульсов. Кроме того, каждый ЛФД в группе 604 чувствительных ЛФД может быть позиционирован в различной оптической плоскости. Первичный ЛФД генерирует сигнал запуска для вторичного ЛФД (этап 806).
[0060] Прием на вторичном ЛФД МВС-сигнала и задержанного сигнала смещения, причем сигнал смещения задерживается за счет задержки 608. Задержанный сигнал смещения может побуждать вторичный ЛФД регистрировать в задержанном временном окне относительно первичного ЛФД. Вторичный (резервный) ЛФД может находиться в другой оптической плоскости, чем первичный ЛФД, вызывая "поглощение" сигнала, испускаемого вторичным (резервным) ЛФД относительно сигнала, испускаемого первичным (чувствительным) ЛФД (этап 808).
[0061] Активацию управления 614 усилением с использованием управления инвертированием коэффициента усиления для управления получающимися выходными сигналами вторичного ЛФД и первичного ЛФД (этап 812).
[0062] Усиление выходного сигнала вторичного ЛФД с помощью усилителя 612 тока с низким уровнем шума на основании управления 614 усилением на этапе 812 (этап 810).
[0063] Объединение получающихся сигналов первичного ЛФД и вторичного ЛФД с использованием обработки MIMO с объединением с максимальным коэффициентом усиления для захвата двух импульсов (событий), находящихся в непосредственной близости (этап 814).
[0064] Усиление результатов этапа 814 с помощью трансимпедансного усилителя (этап 816).
[0065] Регистрация и вывод множественно-возвратного сигнала, включающего один или более скрытых импульсов с помощью оптического детектора 620 с увеличенным разнесением (этап 818).
D. Варианты осуществления для резервирования
[0066] Как обсуждено выше, эффективность регистрации света множественно-возвратного светового сигнала может быть улучшена с введением вторичного ЛФД, который работает резервным образом с первичным ЛФД. Эффективность может быть дополнительно улучшена с помощью включения временного разнесения, например, когда сигнал смещения для вторичного ЛФД задерживается относительно первичного ЛФД. Эффективность может быть дополнительно улучшена с помощью включения пространственного разнесения оптических плоскостей первичного ЛФД и вторичного ЛФД. С пространственным разнесением выходной сигнал вторичного ЛФД может быть ослабленным, что может минимизировать возможность насыщения вторичного ЛФД и входа в период восстановления обратного смещения. Это может позволить вторичному ЛФД регистрировать скрытые импульсы.
[0067] Различные конфигурации вторичных и первичных ЛФД могут иметь дополнительные усовершенствования эффективности. Примерные варианты осуществления включают в себя, но без ограничений, 1 вторичный ЛФД для 1 первичного ЛФД, 1 вторичный ЛФД для n первичных ЛФД и m вторичных ЛФД для n первичных ЛФД. Другими словами, множественные резервные ЛФД могут использоваться с различными комбинациями первичных ЛФД. Вторичные и первичные ЛФД могут работать в статической окружающей среде или в динамической окружающей среде. Как описано здесь, детектор 600 света может работать на статической основе. Для статической окружающей среды работа резервных ЛФД и первичных ЛФД может быть предварительно задана и может быть независимой от характеристик множественно-возвратных световых сигналов.
[0068] Динамические решения могут быть основанными на информации обработки множественно-возвратных световых сигналов. Возможные динамические варианты осуществления могут включать в себя, но без ограничений: 1) изменение порядка управления возбуждением первичных ЛФД. Этот вариант осуществления может включать в себя активацию двух или более первичных ЛФД в момент времени; 2) динамическое регулирование настройки резервирования многократных вторичных ЛФД и многократных первичных ЛФД на основании расположения выбранных ЛФД на оптической фокальной плоскости; и 3) динамическое регулирование сигнала задержки смещения, связанного со вторичными ЛФД.
E. Сущность изобретения
[0069] Варианты осуществления по настоящему документу раскрывают системы и способы подавления засветки ЛФД. Система может содержать первичный лавинный фотодиод (ЛФД), выполненный с возможностью принимать и регистрировать множественно-возвратный световой сигнал при активации первым сигналом смещения, причем множественно-возвратный световой сигнал содержит два или более световых импульсов; вторичный ЛФД, выполненный с возможностью принимать и регистрировать множественно-возвратный световой сигнал при активации вторым сигналом смещения; функциональный блок задержки, который генерирует второй сигнал смещения путем добавления задержки к первому сигналу смещения; и объединитель, выполненный с возможностью объединять множественно-возвратный световой сигнал, регистрируемый первичным ЛФД, и множественно-возвратный световой сигнал, регистрируемый вторичным ЛФД, причем, если первичный ЛФД насыщается при регистрации множественно-возвратного светового сигнала и не способен регистрировать последующий импульс, вторичный ЛФД декодирует последующий импульс. Способ содержит прием множественно-возвратного светового сигнала на первичном ЛФД, причем множественно-возвратный световой сигнал содержит последовательность импульсов, которые вызывают насыщение первичного ЛФД и генерируют пятно засветки при регистрации; прием множественно-возвратного светового сигнала на вторичном ЛФД, причем вторичный ЛФД работает резервным образом с первичным ЛФД; и регистрацию вторичным ЛФД импульсов в множественно-возвратном световом сигнале, которые скрыты в пятне засветки при регистрации первичным ЛФД и не регистрируются первичным ЛФД. Система содержит два или более первичных лавинных фотодиодов (ЛФД), каждый из которых выполнен с возможностью регистрировать множественно-возвратный световой сигнал при активации первым сигналом смещения, причем множественно-возвратный световой сигнал содержит два или более импульсов; два или более вторичных ЛФД, каждый из которых выполнен с возможностью регистрировать множественно-возвратный световой сигнал при активации вторым сигналом смещения, причем каждый из упомянутых двух или более вторичных ЛФД выполнены с возможностью работать резервным образом с каждым из упомянутых двух или более первичных ЛФД для выполнения регистрации множественно-возвратного светового сигнала; и контроллер, выполненный с возможностью выбирать один из упомянутых двух или более вторичных ЛФД и один из упомянутых двух или более первичных ЛФД для регистрации множественно-возвратного светового сигнала.
F. Варианты осуществления системы
[0070] В вариантах осуществления объекты по настоящему патентному документу могут быть направлены на или реализованы в системах обработки информации/вычислительных системах. В целях этого раскрытия вычислительная система может включать в себя любые технические средства или совокупность технических средств, выполненных с возможностью вычислять, рассчитывать, определять, классифицировать, обрабатывать, передавать, принимать, извлекать, создавать, направлять, переключать, сохранять, отображать, осуществлять связь, демонстрировать, регистрировать, записывать, воспроизводить, обслуживать или использовать любую форму информации, сведений или данных для деловых, научных, управленческих или других целей. Например, вычислительная система может быть оптической измерительной системой, такой как система LIDAR, использующей время пролета для составления карты объектов в пределах своей окружающей среды. Вычислительная система может включать в себя оперативную память (ОЗУ), один или более ресурсов обработки, таких как центральный процессор (ЦП) или логические схемы управления аппаратным или программным обеспечением, ПЗУ, и/или другие типы памяти. Дополнительные компоненты вычислительной системы могут включать в себя один или более сетевых или беспроводных портов для связи с внешними устройствами, а также различными устройствами ввода и вывода (I/O), таких как клавиатура, мышь, сенсорный экран и/или видеодисплей. Вычислительная система может также включать в себя одну или более шин, выполненных с возможностью осуществлять связь между различными компонентами аппаратного обеспечения.
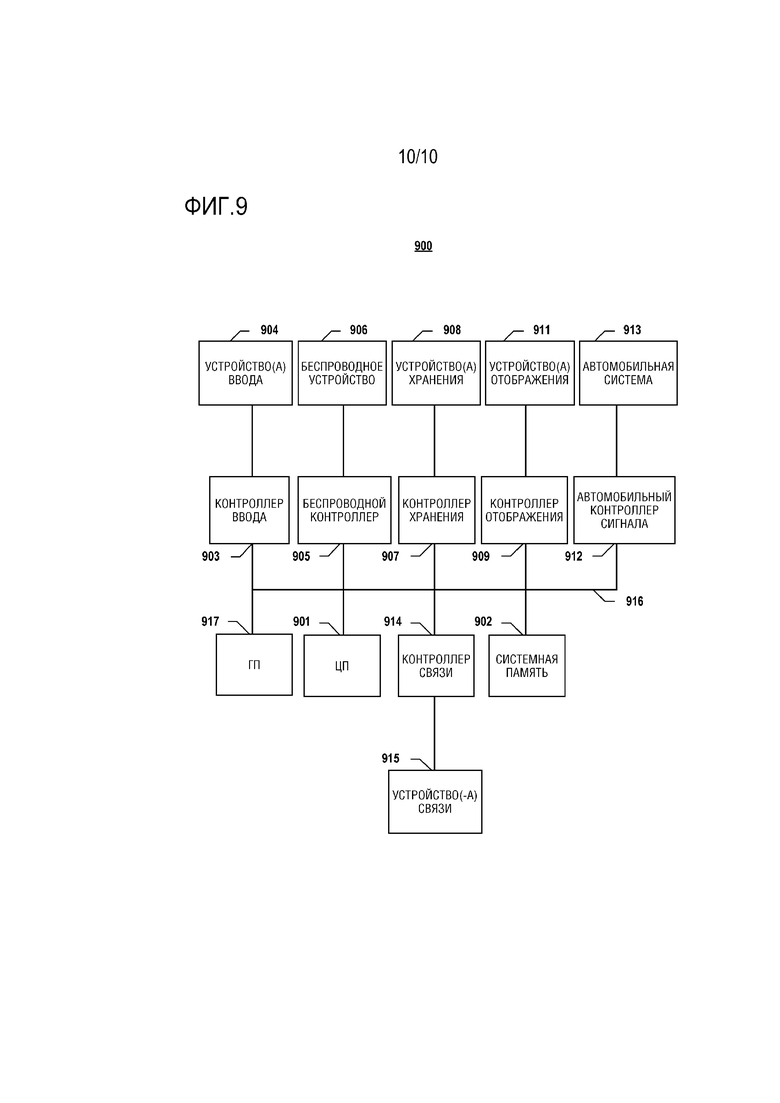
[0071] Фиг.9 отображает упрощенную блок-схему вычислительного устройства/системы обработки информации (или вычислительной системы) в соответствии с вариантами осуществления по настоящему документу. Должно быть ясно, что функциональные возможности, показанные для системы 900, могут функционировать для поддержки различных вариантов осуществления системы обработки информации, хотя следует понимать, что система обработки информации может быть сконфигурирована по-другому и может включать в себя другие компоненты.
[0072] Как показано на Фиг.9, система 900 включает в себя один или более центральных процессоров (ЦП) 901, которые предоставляют вычислительные ресурсы и управляют компьютером. ЦП 901 может быть реализован с помощью микропроцессора или подобного и может также включать в себя один или более графических процессоров (ГП) 917 и/или сопроцессор для вычислений с плавающей точкой для математических расчетов. Система 900 может также включать в себя системную память 902, которая может быть в виде оперативной памяти (ОЗУ), постоянного запоминающего устройства (ПЗУ) или обоих.
[0073] Также может быть предоставлен ряд контроллеров и периферийных устройств, как показано на Фиг.9. Входной контроллер 903 представляет собой интерфейс для различных устройств 904 ввода, таких как клавиатура, мышь или стилус. Также может быть предоставлен беспроводной контроллер 905, который осуществляет связь с беспроводным устройством 906. Система 900 может также включать в себя контроллер 907 запоминающих устройств для взаимодействия с одним или более запоминающими устройствами 908, каждое из которых включает в себя носитель данных, такой как флэш-память, или оптический носитель, который может быть использован для записи программ из инструкций для операционных систем, сервисов и приложений, которые могут включать в себя варианты осуществления программ, реализующих различные аспекты настоящего изобретения. Запоминающее устройство(а) 908 может также быть использовано для сохранения обработанных данных или данных, подлежащих обработке, в соответствии с изобретением. Система 900 может также включать в себя контроллер 909 отображения для предоставления интерфейса для устройства 911 отображения. Вычислительная система 900 может также включать в себя автомобильный контроллер 912 сигналов для осуществления связи с автомобильной системой 913. Контроллер 914 связи может взаимодействовать с одним или более устройствами 915 связи, что дает возможность системе 900 подключаться к удаленным устройствам через любую из разнообразия сетей, включая автомобильную сеть, Интернет, облачный ресурс (например, облако Ethernet, волоконный канал через Ethernet (FCoE)/облако моста центра обработки данных (DCB), и т.д.), локальную сеть (LAN), глобальную сеть (WAN), сеть хранения данных (SAN) или через любые подходящие носители электромагнитных сигналов, включая инфракрасные сигналы.
[0074] В показанной системе все главные системные компоненты могут соединяться с шиной 916, которая может быть представлена более чем одной физической шиной. Однако, различные системные компоненты могут быть или могут не быть в физической близости друг от друга. Например, входные данные и/или выходные данные могут быть переданы удаленно из одного физического местоположения в другое. Кроме того, к программам, которые реализуют различные аспекты этого изобретения, может быть осуществлен доступ из удаленного местоположения (например, сервера) по сети. Такие данные и/или программы могут быть переданы через любой из разнообразия машиночитаемых носителей, включая, но без ограничения: магнитные носители, такие как жесткие диски, гибкие диски и магнитная лента; оптические носители, такие как CD-ROM и голографические устройства; магнитооптические носители; и устройства аппаратного обеспечения, которые специально сконфигурированы для сохранения или сохранения и выполнения программного кода, такие как специализированные интегральные схемы (ASIC), программируемые логические устройства (PLD), устройства флэш-памяти и устройства ОЗУ и ПЗУ.
[0075] Варианты осуществления реализации настоящего изобретения могут быть закодированы на одном или более невременных машиночитаемых носителях с инструкциями для одного или более процессоров или блоков обработки, побуждающими выполнение этапов. Следует отметить, что упомянутые один или более невременных машиночитаемых носителей должны включать в себя энергозависимую и энергонезависимую память. Следует отметить, что возможны альтернативные реализации, включая реализацию аппаратным обеспечением или реализацию программным/аппаратным обеспечением. Функции, реализуемые аппаратным обеспечением, могут быть осуществлены с использованием ASIC (одной или более), программируемых матриц, цифровой схемы обработки сигналов или тому подобного. Соответственно, термины "средства" в каких-либо пунктах формулы изобретения подразумевают охват как реализаций программным обеспечением, так и аппаратным обеспечением. Аналогично, используемый здесь термин "машиночитаемый носитель или носители" включает в себя программное обеспечение и/или аппаратное обеспечение, имеющее программу из инструкций, воплощаемую на нем, или их комбинацию. Имея в виду эти альтернативы реализации, следует понимать, что фигуры и сопровождающее описание предоставляют функциональную информацию, которая потребуется специалисту в данной области техники для написания программного кода (то есть программного обеспечения) и/или изготовления схем (то есть аппаратного обеспечения) для выполнения требуемой обработки.
[0076] Следует отметить, что варианты осуществления настоящего изобретения могут дополнительно относиться к компьютерным продуктам с невременным, материальным машиночитаемым носителем, на котором имеется компьютерный код для выполнения различных реализуемых компьютером операций. Носители и компьютерный код могут быть специально спроектированными и созданными для целей настоящего изобретения или они могут быть вида, известного или доступного для специалистов в соответствующей области техники. Примеры материальных машиночитаемых носителей включают в себя, но не ограничиваются ими: магнитные носители, такие как жесткие диски, гибкие диски и магнитная лента; оптические носители, такие как CD-ROM и голографические устройства; магнитооптические носители; и устройства аппаратного обеспечения, которые специально сконфигурированы для хранения или хранения и выполнения программного кода, такие как специализированные интегральные схемы (ASIC), программируемые логические устройства (PLD), устройства флэш-памяти и устройства ОЗУ и ПЗУ. Примеры компьютерного кода включают в себя машинный код, такой как код, созданный компилятором, и файлы, содержащие высокоуровневый код, выполняемые компьютером с использованием интерпретатора. Варианты осуществления по настоящего изобретения могут быть осуществлены полностью или частично в виде машиновыполняемых команд, которые могут быть в программных модулях, выполняемых устройством обработки. Примеры программных модулей включают в себя библиотеки, программы, порядки действий, объекты, компоненты и структуры данных. В распределенных вычислительных средах программные модули могут быть физически расположены в установках, которые являются локальными, удаленными или обеими.
[0077] Специалисту в данной области техники будет ясно, что никакая вычислительная система или язык программирования не является критической для практической реализации настоящего изобретения. Специалист в данной области техники также поймет, что ряд вышеописанных элементов может быть физически и/или функционально разделен на подмодули или объединен вместе.
[0078] Специалистам в данной области техники будет ясно, что предыдущие примеры и варианты осуществления являются примерными и не ограничивают объем настоящего раскрытия. Это означает, что все их перестановки, расширения, эквиваленты, комбинации и усовершенствования, которые будут очевидны специалистам в данной области техники после прочтения спецификации и изучения чертежей, включены в рамки подлинной сущности и объема настоящего раскрытия. Следует также отметить, что элементы любых пунктов формулы изобретения могут быть расположены иным образом, включая наличие множественных зависимостей, конфигураций и комбинаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ УЛУЧШЕНИЯ ОБНАРУЖЕНИЯ ЭХО-СИГНАЛА В ОПТИЧЕСКОЙ СИСТЕМЕ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ОБНАРУЖЕНИЯ | 2018 |
|
RU2787082C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМ И ЦЕЛЕВЫМ ОБЪЕКТОМ С ПОМОЩЬЮ ИЗМЕРИТЕЛЬНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2602734C2 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| Способ лидарного зондирования и устройство для его осуществления | 2013 |
|
RU2692121C2 |
| КОГЕРЕНТНЫЙ ОПТИЧЕСКИЙ ПРИЕМНИК С УПРАВЛЕНИЕМ ПОСРЕДСТВОМ ОБРАТНОЙ СВЯЗИ И С ЭЛЕКТРОННОЙ КОМПЕНСАЦИЕЙ/КОРРЕКЦИЕЙ | 2007 |
|
RU2394377C1 |
| МНОГОКАНАЛЬНЫЙ LIDAR-ФОРМИРОВАТЕЛЬ ОБЛУЧЕНИЯ | 2019 |
|
RU2778356C1 |
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 2010 |
|
RU2538418C2 |
| УМЕНЬШЕНИЕ ЭФФЕКТОВ ЗАХВАТА В СЦИНТИЛЛЯТОРЕ ЗА СЧЕТ ПРИМЕНЕНИЯ ВТОРИЧНОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2472180C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ СЛАБЫХ ОПТИЧЕСКИХ СИГНАЛОВ | 2000 |
|
RU2190832C2 |
Здесь описаны системы и способы, подавляющие засветку лавинного фотодиода (ЛФД) и позволяющие улучшить точность регистрации множественно-возвратного светового сигнала. Вследствие насыщения первичного ЛФД может возникать пятно засветки. Системы и способы включают в себя введение резервного ЛФД и использование временного разнесения и пространственного разнесения. Регистрация с помощью ЛФД активируется сигналом (напряжения) смещения. Резервный ЛФД принимает задержанный во времени сигнал смещения в сравнении с первичным ЛФД. В дополнение, резервный ЛФД располагается вне главной фокальной плоскости для ослабления выходного сигнала резервного ЛФД. За счет ослабления резервный ЛФД может не насыщаться и может обладать эффективной регистрацией в условиях пятна засветки первичного ЛФД. Варианты осуществления могут включать в себя несколько первичных ЛФД и несколько вторичных ЛФД. 3 н. и 20 з.п. ф-лы, 9 ил.
1. Система подавления засветки лавинного фотодиода, содержащая:
первичный лавинный фотодиод (ЛФД), выполненный с возможностью принимать и регистрировать множественно-возвратный световой сигнал при активации первым сигналом смещения, причем множественно-возвратный световой сигнал содержит два или более световых импульсов;
вторичный ЛФД, выполненный с возможностью принимать и регистрировать множественно-возвратный световой сигнал при активации вторым сигналом смещения;
схему задержки, которая генерирует второй сигнал смещения путем добавления задержки к первому сигналу смещения; и
объединитель, выполненный с возможностью объединять первый выходной сигнал, генерируемый первичным ЛФД в ответ на регистрацию множественно-возвратного светового сигнала, и второй выходной сигнал, генерируемый вторичным ЛФД в ответ на регистрацию множественно-возвратного светового сигнала,
причем, если первичный ЛФД насыщается при регистрации первого импульса множественно-возвратного светового сигнала, вторичный ЛФД декодирует второй импульс множественно-возвратного светового сигнала, следующий за первым импульсом.
2. Система по п.1, дополнительно содержащая блок управления стробированием по дальности, выполненный с возможностью управлять схемой задержки.
3. Система по п.1, в которой вторичный ЛФД принимает ослабленный сигнал относительно первичного ЛФД.
4. Система по п.3, в которой вторичный ЛФД позиционируется на другой оптической плоскости, чем первичный ЛФД, так что вторичный ЛФД предназначен принимать меньшую оптическую мощность множественно-возвратного светового сигнала, чем первичный ЛФД.
5. Система по п.1, дополнительно содержащая усилитель тока, причем второй выходной сигнал вторичного ЛФД содержит выходной ток, и при этом усилитель тока выполнен с возможностью усиливать выходной ток вторичного ЛФД.
6. Система по п.5, дополнительно содержащая контроллер усиления, причем первый выходной сигнал первичного ЛФД содержит выходной ток, и при этом контроллер усиления выполнен с возможностью управлять усилителем тока посредством управления инвертированием коэффициента усиления на основе выходного тока вторичного ЛФД и выходного тока первичного ЛФД.
7. Система по п.1, дополнительно содержащая оптический детектор с улучшенным разнесением, соединенный с выходом объединителя и выполненный с возможностью генерировать регистрируемый множественно-возвратный сигнал.
8. Система по п.1, содержащая два или более первичных ЛФД, причем вторичный ЛФД обеспечивает резервную поддержку для упомянутых двух или более первичных ЛФД на основе последовательности управления возбуждением для упомянутых двух или более первичных ЛФД.
9. Система по п.1, содержащая два или более первичных ЛФД и два или более вторичных ЛФД.
10. Система по п.9, дополнительно содержащая контроллер, выполненный с возможностью выбирать один из упомянутых двух или более первичных ЛФД и один из упомянутых двух или более вторичных ЛФД для регистрации множественно-возвратного светового сигнала.
11. Система по п.1, в которой объединитель осуществляет обработку MIMO (ввода-вывода с отображением в память) с объединением с максимальными коэффициентами усиления.
12. Способ подавления засветки лавинного фотодиода, содержащий:
прием множественно-возвратного светового сигнала на первичном ЛФД, причем множественно-возвратный световой сигнал содержит последовательность импульсов, которые вызывают насыщение первичного ЛФД и генерируют пятно засветки при регистрации;
прием множественно-возвратного светового сигнала на вторичном ЛФД, причем вторичный ЛФД работает резервным образом относительно первичного ЛФД; и
регистрацию вторичным ЛФД импульсов в множественно-возвратном световом сигнале, которые скрыты в пятне засветки при регистрации первичного ЛФД.
13. Способ по п.12, причем имеется оптическое разделение между вторичным ЛФД и первичным ЛФД, и при этом оптическая мощность множественно-возвратного светового сигнала, принятого на вторичном ЛФД, ослаблена относительно оптической мощности множественно-возвратного светового сигнала, принятого на первичном ЛФД.
14. Способ по п.13, в котором, если первичный ЛФД насыщается за счет множественно-возвратного светового сигнала, вторичный ЛФД избегает насыщения вследствие ослабления оптической мощности множественно-возвратного светового сигнала, принятого на вторичном ЛФД.
15. Способ по п.12, в котором регистрация множественно-возвратного светового сигнала на первичном ЛФД активируется первым сигналом смещения, а регистрация множественно-возвратного светового сигнала на вторичном ЛФД активируется вторым сигналом смещения, причем второй сигнал смещения задерживается относительно первого сигнала смещения на шаг задержки.
16. Способ по п.15, в котором шаг задержки представляет собой часть ширины импульсов множественно-возвратного светового сигнала.
17. Система подавления засветки лавинного фотодиода, содержащая:
два или более первичных лавинных фотодиодов, каждый из которых выполнен с возможностью регистрировать множественно-возвратный световой сигнал при активации первым сигналом смещения, причем множественно-возвратный световой сигнал содержит два или более импульсов;
два или более вторичных ЛФД, каждый из которых выполнен с возможностью регистрировать множественно-возвратный световой сигнал при активации вторым сигналом смещения, причем каждый из упомянутых двух или более вторичных ЛФД выполнен с возможностью работать резервным образом с каждым из упомянутых двух или более первичных ЛФД для выполнения регистрации множественно-возвратного светового сигнала; и
контроллер, выполненный с возможностью выбирать один из упомянутых двух или более вторичных ЛФД и один из упомянутых двух или более первичных ЛФД для регистрации множественно-возвратного светового сигнала.
18. Система по п.17, в которой основание для выбора первичных и вторичных ЛФД определено предварительно.
19. Система по п.17, в которой первичные и вторичные ЛФД динамически выбираются на основании информации обработки сигналов для множественно-возвратного светового сигнала.
20. Система по п.19, в которой за счет динамического выбора изменяется порядок возбуждения первичных ЛФД.
21. Система по п.19, в которой за счет динамического выбора регулируется второй сигнал смещения относительно первого сигнала смещения.
22. Система по п.19, в которой динамический выбор основан на относительных положениях на фокальной плоскости первичных и вторичных ЛФД.
23. Система по п.17, в которой выбранный вторичный ЛФД позиционирован вне главной оптической фокальной плоскости выбранного первичного ЛФД, тем самым делая выбранный вторичный ЛФД принимающим ослабленный сигнал относительно выбранного первичного ЛФД.
| CN 106130722 A, 16.11.2016 | |||
| Способ определения частотных характеристик фотоприемного устройства с лавинным фотодиодом | 1986 |
|
SU1429047A1 |
| СПОСОБ ПОДАВЛЕНИЯ ЛАВИННОГО ШУМА В СПЕКТРОМЕТРАХ С МЕДЛЕННЫМИ СЦИНТИЛЛЯТОРАМИ И КРЕМНИЕВЫМИ ФОТОУМНОЖИТЕЛЯМИ | 2015 |
|
RU2597668C1 |
| Способ резания табака на крошку | 1927 |
|
SU10468A1 |

