Изобретение относится к геодезическому приборостроению, а именно к лазерным оптико-электронным устройствам, предназначенным для автоматизированного геодезического контроля прямолинейности рельсовых путей, в частности направляющих рельсов подкрановых путей.
Цель изобретения - повышение точности и производительности,
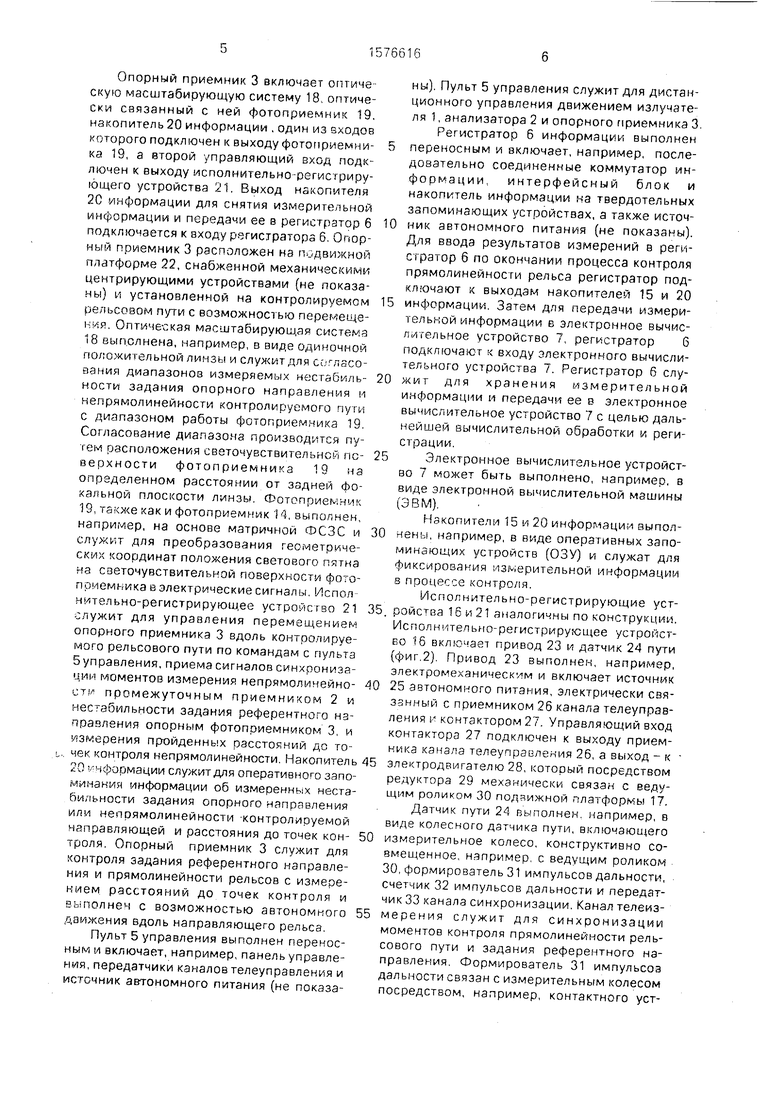
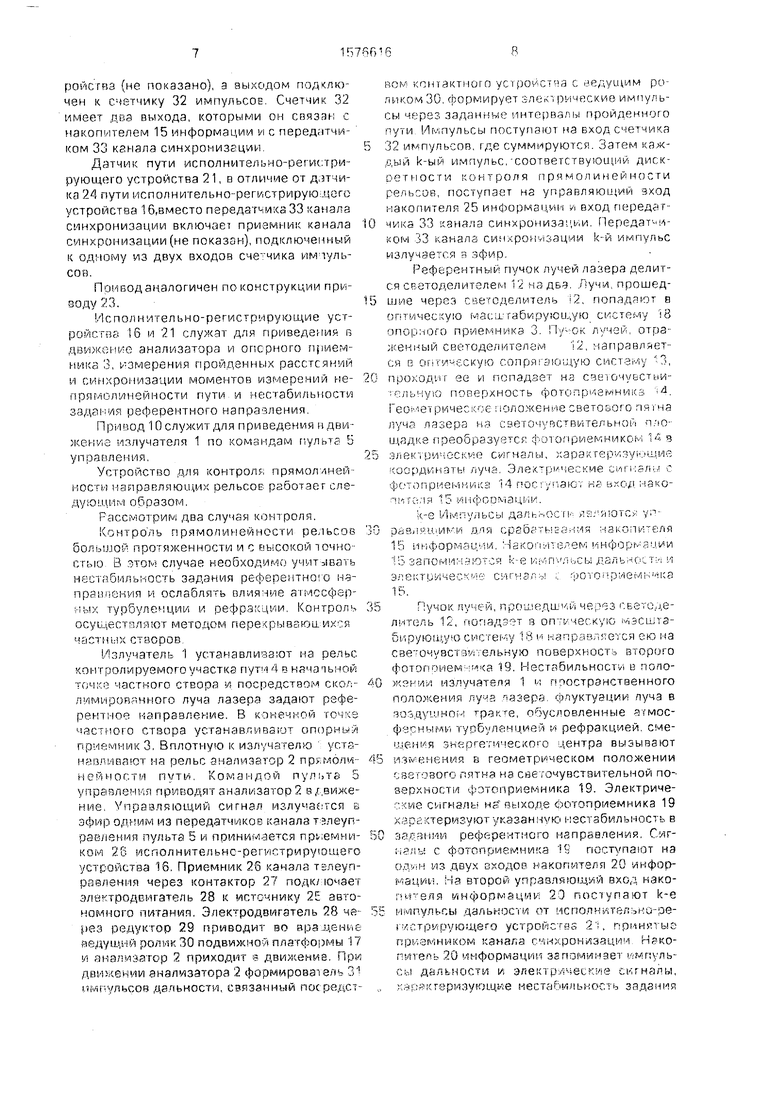
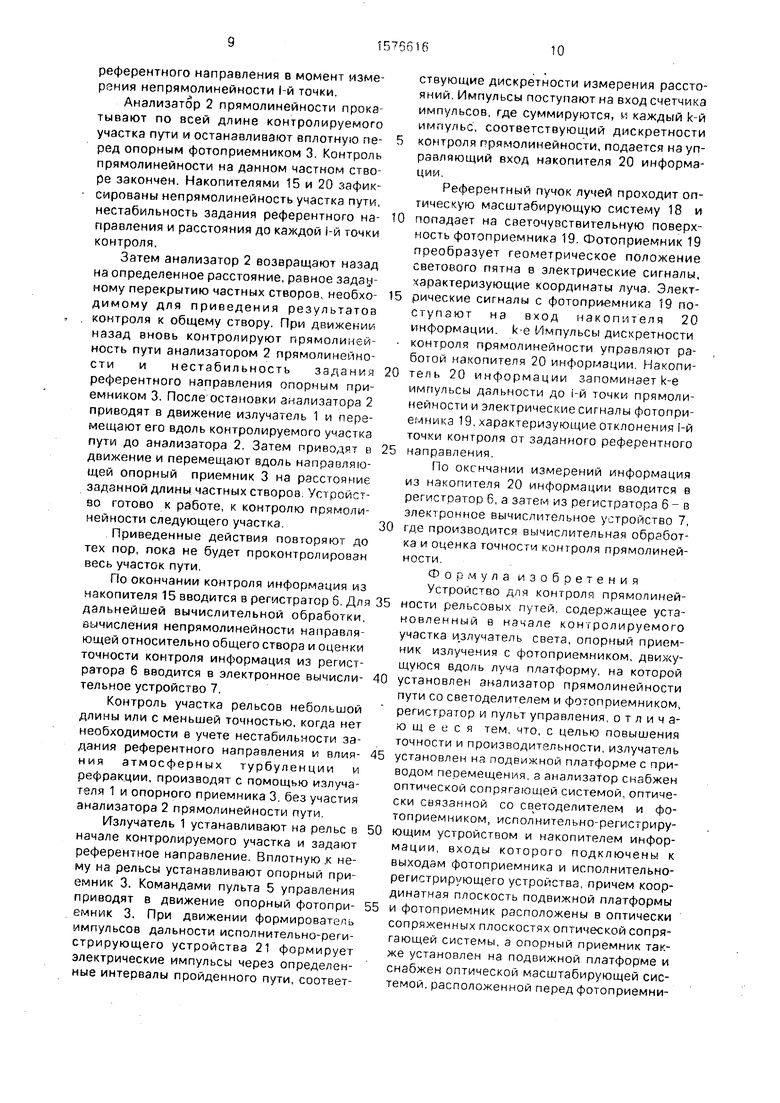
На фиг,1 приведена структурная схема предложенного устройства; на фиг.2 - функциональная схема исполнительно-регистрирующего устройства анализатора прямолинейности; на фиг .З - ход лучей в оптической сопрягающей системе.
Устройство для контроля прямолинейности направляющих рельсов содержит излучатель 1 света (фиг. 1), анализатор 2 прямолинейности пути и опорный приемник 3 излучения, оптически связанные между собой и установленные на контролируемом участке пути 4 с возможностью перемещения. Анализатор 2 и опорный приемник 3 связаны между собой каналом синхронизации. Устройство содержит также пульт 5 управления, связанный каналами телеуправления с излучателем 1, анализатором 2 и опорным приемником 3, регистратор 6 и электронное вычислительное устройство 7. Излучатель 1 включает источник 8 светового излучения, например лазерного, с оптической коллимирующей системой 9 и привод Ю перемещения излучателя t вдоль контролируемого участка пути по командам пульта 5 управления, Для этого излучатель 1 расположен на подвижной платформе 11, снабженной механическими центрирующими устройствами фиксирования оси головки рельса (не показаны) и установленной на рельсе с возможностью перемещения. Излучатель 1 служит для задания референтного направления с помощью коллимиро- ванного луча лазера и может автономно перемещаться вдоль контролируемой направляющей.
Анализатор 2 прямолинейности включает светоделитель 12, оптическую сопрягающую систему 13 и фотоприемник 14, оптически связанные и расположенные по ходу отраженного луча. Выход фотоприемника 14 подключен к входу накопителя 15 информации, к второму управляющему входу которого подключено исполнительно-регистрирующее устройство 16. Выход накопителя 15 информации подключается к входу регистратора 6 для передачи измерительной информации. Анализатор 2 прямолинейности расположен на подвижной платформе 17, снабженной механическими центрирующими устройствами (не показаны). Светоделитель 12 выполнен, например, в виде полупрозрачного зеркала. Оптическая сопрягающая система 13 выполнена, например, в виде ломаной телескопической
системы. Фотоприемник 14 выполнен, например, на основе матричной ФСЗС (фотоструктуры с зарядовой связью). Исполнительно-регистрирующее устройство 16 служит для управления1 перемещением
0 анализатора 2 вдоль контролируемого участка пути по командам пульта 5 управления, измерения пройденных расстояний и подачи команд по каналу синхронизации опорному приемнику 3 для синхронных из5 мерений нестабильности задания референтного направления одновременно с измерением непрямолинейности контролируемого пути. Накопитель 15 информациии служит для оперативного запоминания ин0 формации об измеренных непрямолинейности контролируемой направляющей и пройденном пути. На подвижной платформе 17 задана координатная плоскость измерений непрямолинейности и пройден5 ного расстояния, которая совпадает с совмещенными плоскостями центрирования и опирания платформы на головке рельса. Координатная плоскость и светочувствительная поверхность фотоприемника 14 в свою
0 очередь совмещены с оптически сопряженными плоскостями сопрягающей системы
13,т.е. координатная плоскость АА платформы 17 и светочувствительная поверхность фотоприемника 14 расположены
5 соответственно в передней объектива и задней окуляра фокальных плоскостях (фиг.З). Светоделитель 12 расположен, например, посередине между координатной плоскостью платформы 17 и объективом оптиче0 ской сопрягающей системы 13. При таком положении угловые развороты светоделителя относительно точки 0 координатной плоскости АА1 , лучи а, с и b, d (фиг.З) при движении анализатора 2 по направляющей
5 не вызывают смещения светового пятна лазерного луча в плоскости фотоприемника
14.Кроме того, оптическая сопрягающая система 13 используется также для согласования диапазона измеряемой непрямоли0 нейности с диапазоном работы фотоприемника 14 путем задания необходимого увеличения. Анализатор 2 прямолинейности служит для измерения с заданной дискретностью непрямолинейности контроли5 руемой направляющей, измерения пройденного пути до точек контроля и синхронизации моментов измерения непрямолинейности рельсового пути с измерением не- стабильности задания референтного направления.
Опорный приемник 3 включает оптическую масштабирующую систему 18, оптически связанный с ней фотоприемник 19, накопитель 20 информации , один из входов которого подключен к выходу фотоприемни- ка 19, а второй управляющий вход подключен к выходу исполнительно-регистрирующего устройства 21. Выход накопителя 20 информации для снятия измерительной информации и передачи ее в регистратор 6 подключается к входу регистратора 6. Опорный приемник 3 расположен на подвижной платформе 22, снабженной механическими центрирующими устройствами (не показаны) и установленной на контролируемом рельсовом пути с возможное ью перемещения. Оптическая масштабирующая система 18 выполнена, например, в виде одиночной положительной линзы и служит для согласования диапазонов измеряемых нестабиль- ности задания опорного направления и непрямолинейности контролируемого пути с диапазоном работы фотоприемника 19. Согласование диапазона производится пу- гем расположения светочувствительной по- верхности фотоприемника 19 на определенном расстоянии от задней фокальной плоскости линзы. Фотоприемник 19, также как и фотоприемник 14, выполнен, например, на основе матричной ФСЗС и служат для преобразования геометрических координат положения светового пятна на светочувствительной поверхности фотоприемника в электрические сигналы. Исполнительно-регистрирующее устройство 21 служит для управления перемещением опорного приемника 3 вдоль контролируемого рельсового пути по командам с пульта 5 управления, приема сигналов синхронизации моментов измерения непрямолинейно- стм промежуточным приемником 2 и нестабильности задания референтного направления опорным фотоприемником 3, и измерения пройденных расстояний до точек контроля непрямолинейности. Накопитель 20 информации служит для оперативного запоминания информации об измеренных нестабильности задания опорного направления или непрямолинейности -контролируемой направляющей и расстояния до точек кон- троля. Опорный приемник 3 служит для контроля задания референтного направления и прямолинейности рельсов с измерением расстояний до точек контроля и выполнен с возможностью автономного движения вдоль направляющего рельса.
Пульт 5 управления выполнен переносным и включает, например, панель управления, передатчики каналов телеуправления и источник автономного питания (не показаны). Пульт 5 управления служит для дистанционного управления движением излучателя 1, анализатора 2 и опорного приемника 3.
Регистратор 6 информации выполнен переносным и включает, например, последовательно соединенные коммутатор информации, интерфейсный блок и накопитель информации на твердотельных запоминающих устройствах, а также источник автономного питания (не показаны). Для ввода результатов измерений в регистратор б по окончании процесса контроля прямолинейности рельса регистратор подключают к выходам накопителей 15 и 20 информации. Затем для передачи измерительной информации в электронное вычислительное устройство 7, регистратор 6 подключают к входу электронного вычислительного устройства 7. Регистратор 6 служит для хранения измерительной информации и передачи ее в электронное вычислительное устройство 7 с целью дальнейшей вычислительной обработки и регистрации.
Электронное вычислительное устройство 7 может быть выполнено, например, в виде электронной вычислительной машины (ЭВМ).
Накопители 15 и 20 информации выполнены, например, в виде оперативных запоминающих устройств (ОЗУ) и служат для фиксирования измерительной информации в процессе контроля.
Исполнительно-регистрирующие устройства 16 и 21 аналогичны по конструкции. Исполнительно-регистрирующее устройство 16 включает привод 23 и датчик 24 пути (фиг.2). Привод 23 выполнен, например, электромеханическим и включает источник 25 автономного питания, электрически связанный с приемником 26 канала телеуправления и контактором 27. Управляющий вход контактора 27 подключен к выходу приемника канала телеуправления 26, а выход - к электродвигателю 28, который посредством редуктора 29 механически связан с ведущим роликом 30 подвижной платформы 17.
Датчик пути 24 выполнен, например, в виде колесного датчика пути, включающего измерительное колесо, конструктивно совмещенное, например, с ведущим роликом 30, формирователь 31 импульсов дальности, счетчик 32 импульсов дальности и передатчик 33 канала синхронизации.Канал телеиз- мерения служит для синхронизации моментов контроля прямолинейности рельсового пути и задания референтного направления. Формирователь 31 импульсов дальности связан с измерительным колесом посредством, например, контактного устройства (не показано), а выходом подключен к счетчику 32 импульсов. Счетчик 32 имеет два выхода, которыми он связан с накопителем 15 информации и с передатчиком 33 канала синхронизации.
Датчик пути исполнительно-регистрирующего устройства 21, в отличие от датчика 24 пути исполнительно-регистрирующего устройства 16,вместо передатчика 33 канала синхронизации включает приемник канала синхронизации (не показан), подключенный к одному из двух входов счетчика импульсов.
Привод аналогичен по конструкции приводу 23.
Исполнительно-регистрирующие устройства 16 и 21 служат для приведения в движение анализатора и опорного приемника 3, измерения пройденных расстояний и синхронизации моментов измерений непрямолинейности пути и нестабильности задания референтного направления.
Привод 10 служит для приведения в движение излучателя 1 по командам пульта 5 управления.
Устройство для контроля прямолинейности направляющих рельсов работает следующим образом.
Рассмотрим два случая контроля. Контроль прямолинейности рельсов большой протяженности и с высокой точностью. В этом случае необходимо учитывать нестабильность задания референтного направления и ослаблять влияние атмосферных турбуленции и рефракции. Контроль осуществляют методом перекрывающихся , частных створов.
Излучатель 1 устанавливают на рельс контролируемого участка пути 4 в начальной точке частного створа и посредством скол- лимированного луча лазера задают референтное направление. В конечной точке частного створа устанавливают опорный приемник 3. Вплотную к излучателю 1 устанавливают на рельс анализатор 2 прямолинейности пути, Командой пульта 5 управления приводят анализатор 2 в движение. Управляющий сигнал излучается в эфир одним из передатчиков канала телеуправления пульта 5 и принимается приемником 26 исполнительно-регистрирующего устройства 16. Приемник 26 канала телеуправления через контактор 27 подключает электродвигатель 28 к источнику 25 автономного питания. Электродвигатель 28 через редуктор 29 приводит во вращение ведущий ролик 30 подвижной платформы 17 и анализатор 2 приходит в движение. При движении анализатора 2 формирователь 31 импульсов дальности, связанный посредством контактного устройства с ведущим роликом 30, формирует электрические импульсы через заданные интервалы пройденного пути. Импульсы поступают на вход счетчика
32 импульсов, где суммируются. Затем каждый k-ый импульс, соответствующий дискретности контроля прямолинейности рельсов, поступает на управляющий вход накопителя 25 информации и вход передат0 чика 33 канала синхронизации. Передатчиком 33 канала синхронизации k-й импульс излучается в эфир.
Референтный пучок лучей лазера делится светоделителем 12 на два. Лучи, прошед5 шие через светоделитель 12, попадают в оптическую масштабирующую систему 18 опорного приемника 3. Пучок лучей, отраженный светоделителем 12, направляется в оптическую сопрягающую систему 13,
0 проходит ее и попадает на светочувствительную поверхность фотоприемника 14. Геометрическое положение светового пятна луча лазера на светочувствительной площадке преобразуется фотоприемником 14 в
5 электрические сигналы, характеризующие координаты луча. Электрические сигналы с фотоприемника 14 поступают на вход накопителя 15 информации.
k-e Импульсы дальности являются уп0 равлрщими для срабатывания накопителя 15 информации. Накопителем информации 15 запоминаются k-e импульсы дальности и электрические сигналы с фотоприемника 15.
5 Пучок лучей, прошедший через светоделитель 12, попадает в оптическую масштабирующую систему 18 и направляется ею на светочувствительную поверхность второго фотоприемника 19. Нестабильности в поло0 жении излучателя 1 и пространственного положения луча лазера, флуктуации луча в воздушном тракте, обусловленные атмосферными турбуленцией и рефракцией, смещения энергетического центра вызывают
5 изменения в геометрическом положении светового пятна на светочувствительной по-- верхности фотоприемника 19. Электрические сигналы нз выходе фотоприемника 19 характеризуют указанную нестабильность в
0 задании референтного направления. Сигналы с фотоприемника 19 поступают на один из двух входов накопителя 20 информации. На второй управляющий вход накопителя информации 20 поступают k-e
5 импульсы дальности от исполнительно-регистрирующего устройства 21, принятые приемником канала синхронизации. Накопитель 20 информации запоминает импульсы дальности и электрические сигналы, . характеризующие нестабильность задания
референтного направления в момент измерения непрямолинейности 1-й точки,
Анализатор 2 прямолинейности прокатывают по всей длине контролируемого участка пути и останавливают вплотную пе- ред опорным фотоприемником 3. Контроль прямолинейности на данном частном створе закончен. Накопителями 15 и 20 зафиксированы непрямолинейность участка пути, нестабильность задания референтного на- правления и расстояния до каждой 1-й точки контроля.
Затем анализатор 2 возвращают назад на определенное расстояние, равное заданному перекрытию частных створов, необхо- димому для приведения результатов контроля к общему створу. При движении назад вновь контролируют прямолинейность пути анализатором 2 прямолинейности и нестабильность задания референтного направления опорным приемником 3. После остановки анализатора 2 приводят в движение излучатель 1 и перемещают его вдоль контролируемого участка пути до анализатора 2. Затем приводят в движение и перемещают вдоль направляющей опорный приемник 3 на расстояние заданной длины частных створов. Устройство готово к работе, к контролю прямолинейности следующего участка.
Приведенные действия повторяют до тех пор, пока не будет проконтролирован весь участок пути.
По окончании контроля информация из накопителя 15 вводится в регистратор 6. Для дальнейшей вычислительной обработки, вычисления непрямолинейности направляющей относительно общего створа и оценки точности контроля информация из регистратора 6 вводится в электронное вычисли- тельное устройство 7.
Контроль участка рельсов небольшой длины или с меньшей точностью, когда нет необходимости в учете нестабильности задания референтного направления и влия- ния атмосферных турбуленции и рефракции, производят с помощью излучателя 1 и опорного приемника 3, без участия анализатора 2 прямолинейности пути.
Излучатель 1 устанавливают на рельс в начале контролируемого участка и задают референтное направление. Вплотную ,к нему на рельсы устанавливают опорный приемник 3. Командами пульта 5 управления приводят в движение опорный фотопри- емник 3. При движении формирователь импульсов дальности исполнительно-регистрирующего устройства 21 формирует электрические импульсы через определенные интервалы пройденного пути, соответствующие дискретности измерения расстояний. Импульсы поступают на вход счетчика импульсов, где суммируются, и каждый k-й импульс, соответствующий дискретности контроля прямолинейности, подается на управляющий вход накопителя 20 информации.
Референтный пучок лучей проходит оптическую масштабирующую систему 18 и попадает на светочувствительную поверхность фотоприемника 19. Фотоприемник 19 преобразует геометрическое положение светового пятна в электрические сигналы, характеризующие координаты луча. Электрические сигналы с фотоприемника 19 поступают на вход накопителя 20 информации, k-e Импульсы дискретности контроля прямолинейности управляют работой накопителя 20 информации. Накопитель 20 информации запоминает k-e импульсы дальности до i-й точки прямолинейности и электрические сигналы фотоприемника 19. характеризующие отклонения 1-й точки контроля от заданного референтного направления.
По окончании измерений информация из накопителя 20 информации вводится в регистратор 6, а затем из регистратора 6 - в электронное вычислительное устройство 7, где производится вычислительная обработка и оценка точности контроля прямолинейности.
Формула изобретения
Устройство для контроля прямолинейности рельсовых путей, содержащее установленный в начале контролируемого участка излучатель света, опорный приемник излучения с фотоприемником, движущуюся вдоль луча платформу, на которой установлен анализатор прямолинейности пути со светоделителем и фотоприемником, регистратор и пульт управления, отличающееся тем, что, с целью повышения точности и производительности, излучатель установлен на подвижной платформе с приводом перемещения, а анализатор снабжен оптической сопрягающей системой, оптически связанной со светоделителем и фотоприемником, исполнительно-регистрирующим устройством и накопителем информации, входы которого подключены к выходам фотоприемника и исполнительно- регистрирующего устройства, причем координатная плоскость подвижной платформы и фотоприемник расположены в оптически сопряженных плоскостях оптической сопрягающей системы, а опорный приемник также установлен на подвижной платформе и снабжен оптической масштабирующей системой, расположенной перед фотоприемником, причем на подвижной платформе установлено исполнительно-регистрирующее устройство перемещения и измерения пройденного пути, и накопитель информации, входы которого подключены к выходам фотоприемника и исполнительно-регистрирующего устройства, при этом пульт управления каналами телеуправления связан с указанным приводом и исполнительно-регистрирующими устройствами соответственно излучателя и анализатора и опорного приемника излучения, причем анализатор и опорный приемник излучения связаны между собой каналом синхронизации, а регистратор выполнен с возможностью подключения к выходам накопителей информации и к входу электронно-вычислительного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ ПОВЕРХНОСТИ | 1996 |
|
RU2133012C1 |
| Интерференционное устройство для измерения линейных перемещений объекта | 1989 |
|
SU1670409A1 |
| Устройство для контроля расстояния между рельсами пути | 1988 |
|
SU1641922A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ НЕПРЯМОЛИНЕЙНОСТИ | 2015 |
|
RU2603999C1 |
| Когерентно-оптический процессор для обработки сигналов антенной решетки | 1982 |
|
SU1075843A1 |
| Устройство для измерения непрямолинейности объекта | 1984 |
|
SU1320665A1 |
Изобретение относится к геодезическому приборостроению, а именно к лазерным оптико-электронным устройствам, предназначенным для автоматизированного геодезического контроля прямолинейности рельсовых путей. Целью изобретения является повышение точности и производительности. Устройство содержит излучатель 1, анализатор 2 прямолинейности, опорный приемник 3, пульт 5 управления, регистратор 6 и электронное вычислительное устройство 7. Излучатель 1 включает источник 8 светового излучения с оптической коллимирующей системой 9 и привод 10 перемещения и расположен на подвижной платформе 11. Анализатор 2 прямолинейности включает светоделитель 12, оптическую сопрягающую систему 13 и фотоприемник 14, подключенный к входу накопителя 15 информации. К второму управляющему входу накопителя 15 информации подключено исполнительно-регистрирующее устройство 16. Выход накопителя 15 информации подключается к входу регистратора 6 для передачи информации. Аналазитор 2 расположен на подвижной платформе 17. Опорный приемник 3 включает оптическую масштабирующую систему 18, фотоприемник 19, накопитель 20 информации, один из двух входов которого подключен к выходу фотоприемника 19, а другой, управляющий вход, подключен к выходу исполнительно-регистрирующего устройства 21. Выход накопителя 20 информации для снятия измерительной информации и передачи ее в регистратор 6 подключается к входу регистратора 6. Опорный приемник расположен на подвижной платформе 22. Регистратор 6 для ввода информации в электронное вычислительное устройство 7 подключается к его входу. 3 ил.
23
L
24
Фиг. 2.
.
дЗ
30
В
| Фотоэлектрическое устройство для контроля прямолинейности | 1973 |
|
SU641274A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
